Research on Automatic Generation Control with Wind Power Participation Based on Predictive Optimal 2-Degree-of-Freedom PID Strategy for Multi-area Interconnected Power System


Abstract
1. Introduction
2. Model Description
2.1. Distributed Model of Interconnected Power System
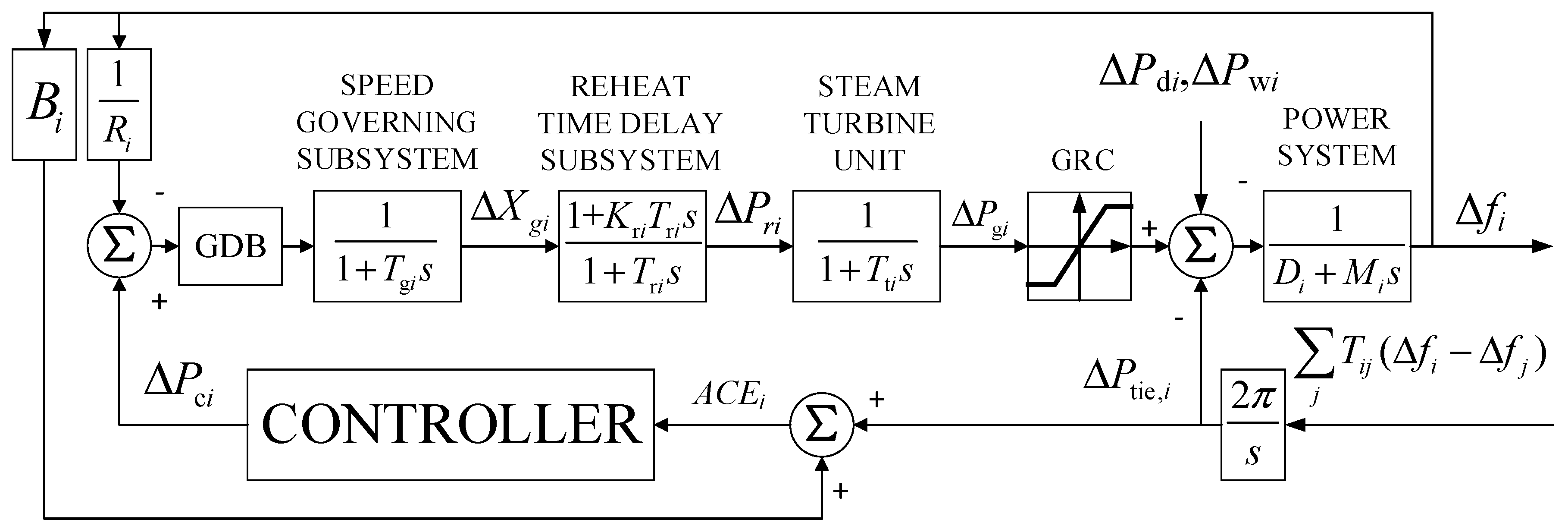
2.2. AGC Model with Thermal Power
2.3. AGC Model with Wind Farm Participation
2.4. Nonlinear Constraint Processing
3. Predictive Optimal 2-DOF PID Control Strategy
3.1. Structure of the Controller
3.2. Predictive Control Problem Formulation
3.3. Predictive Optimization
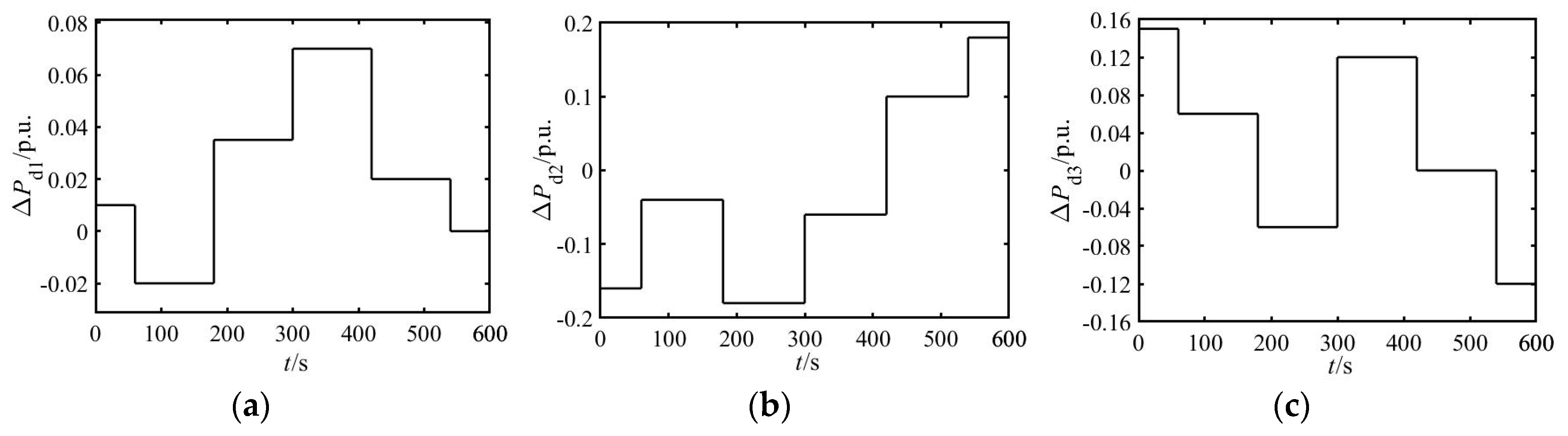
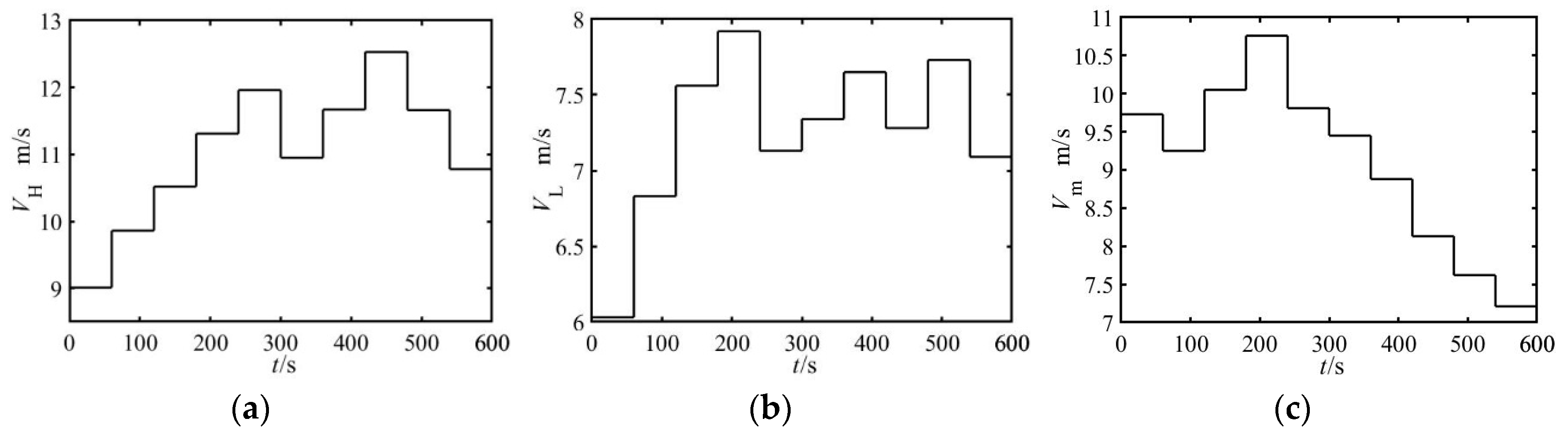
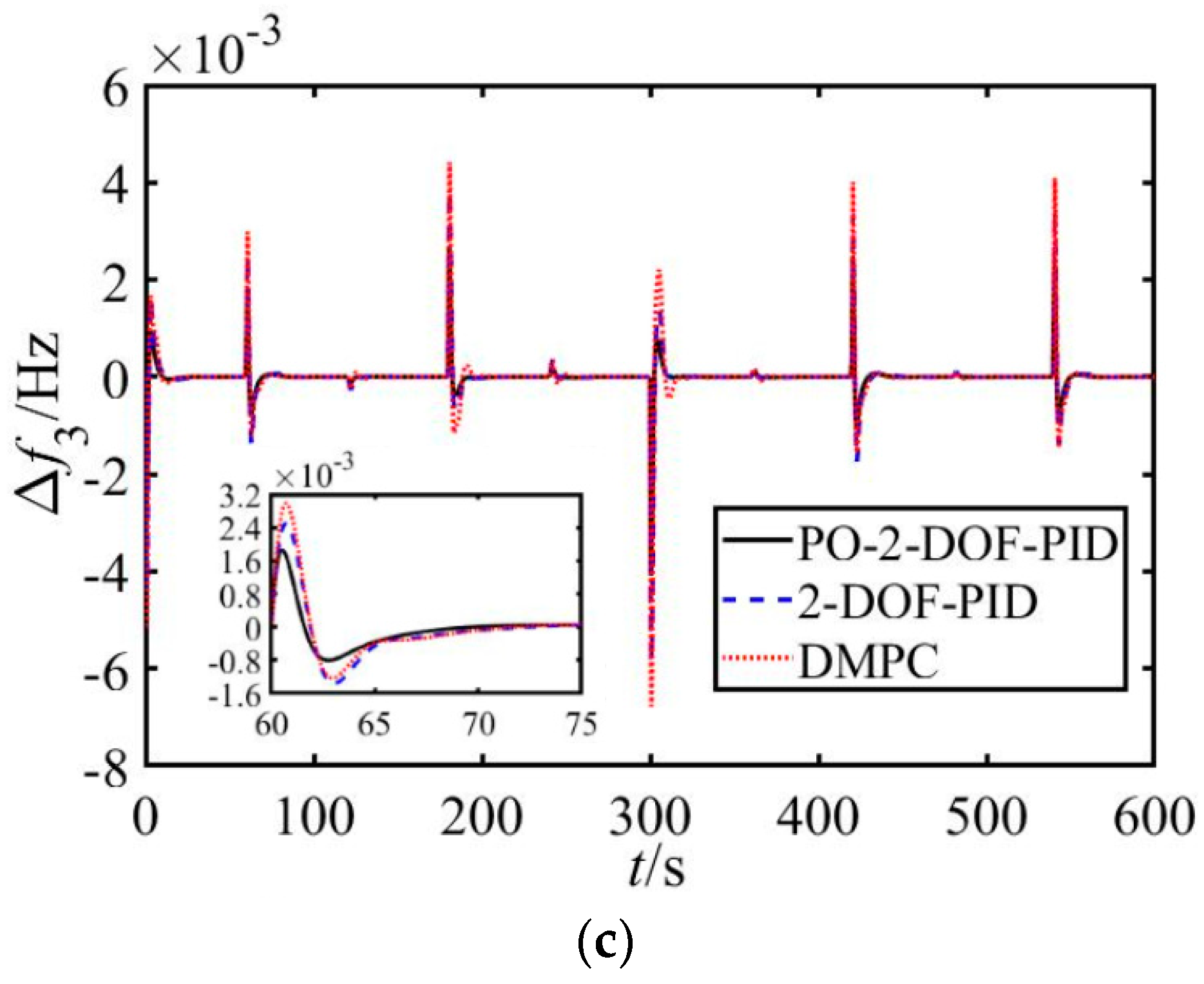
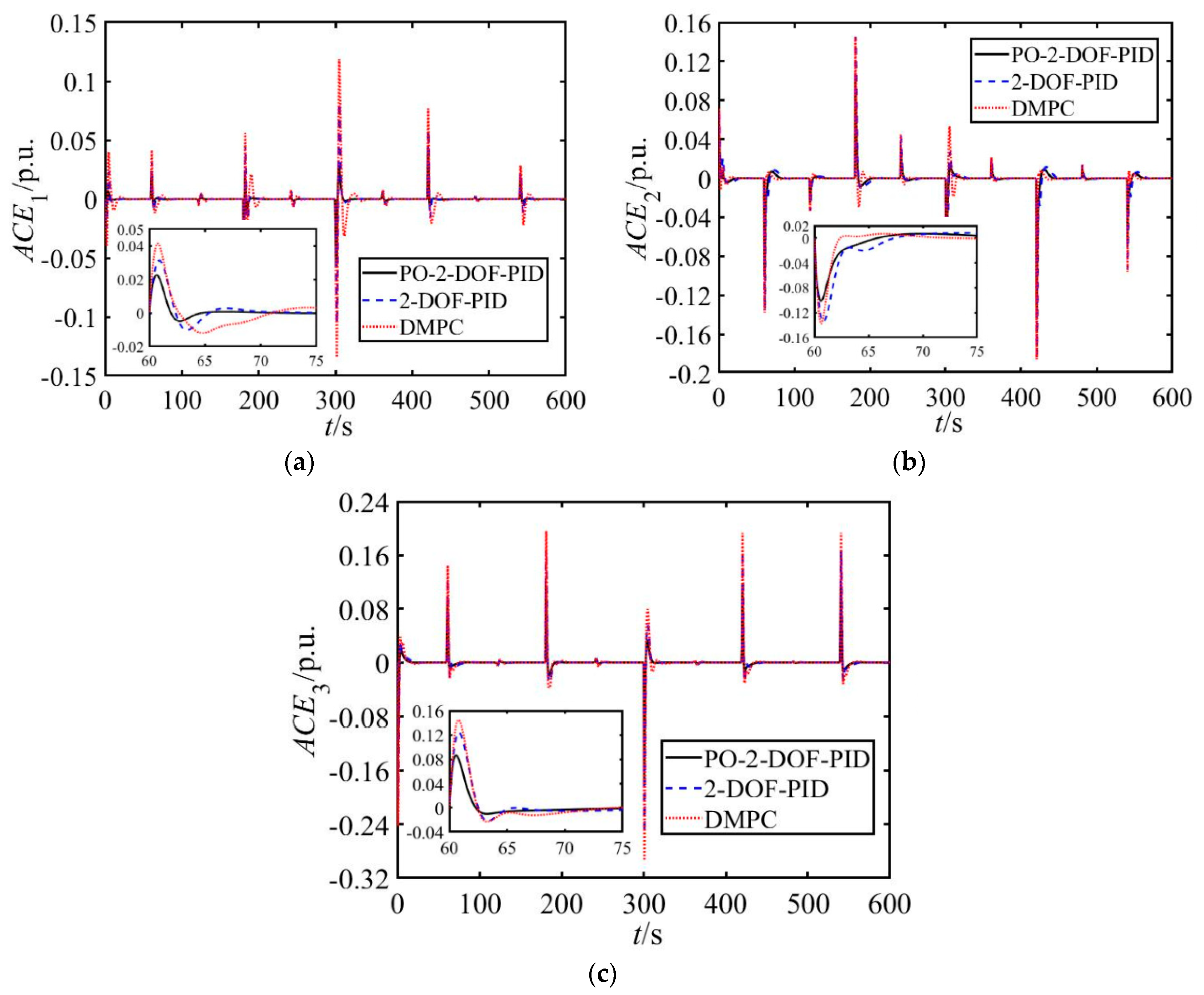
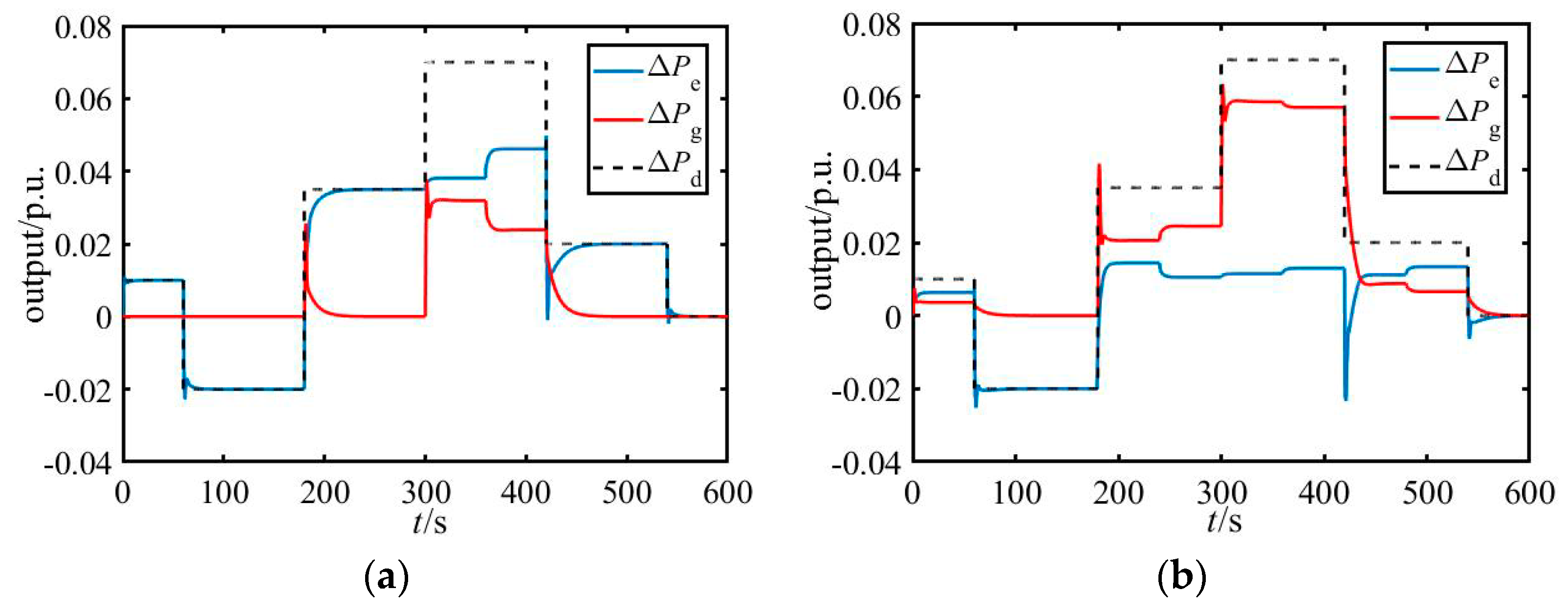
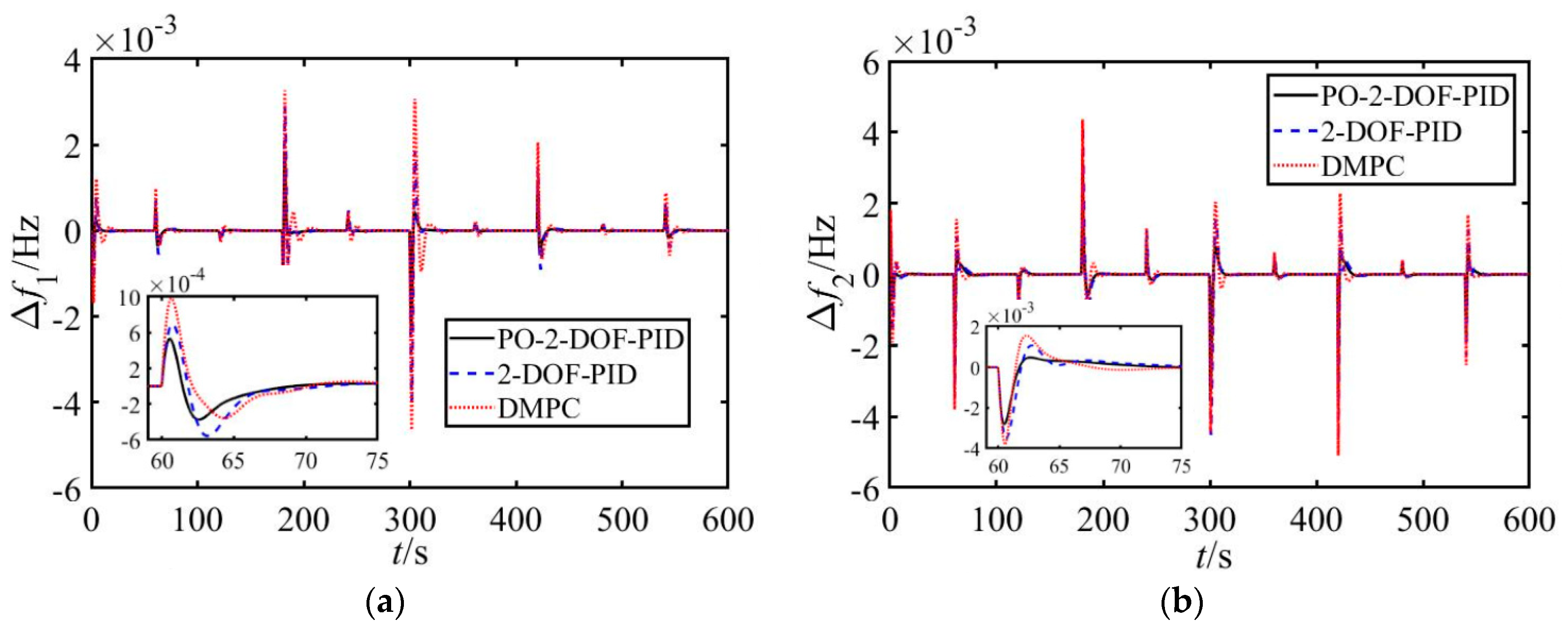
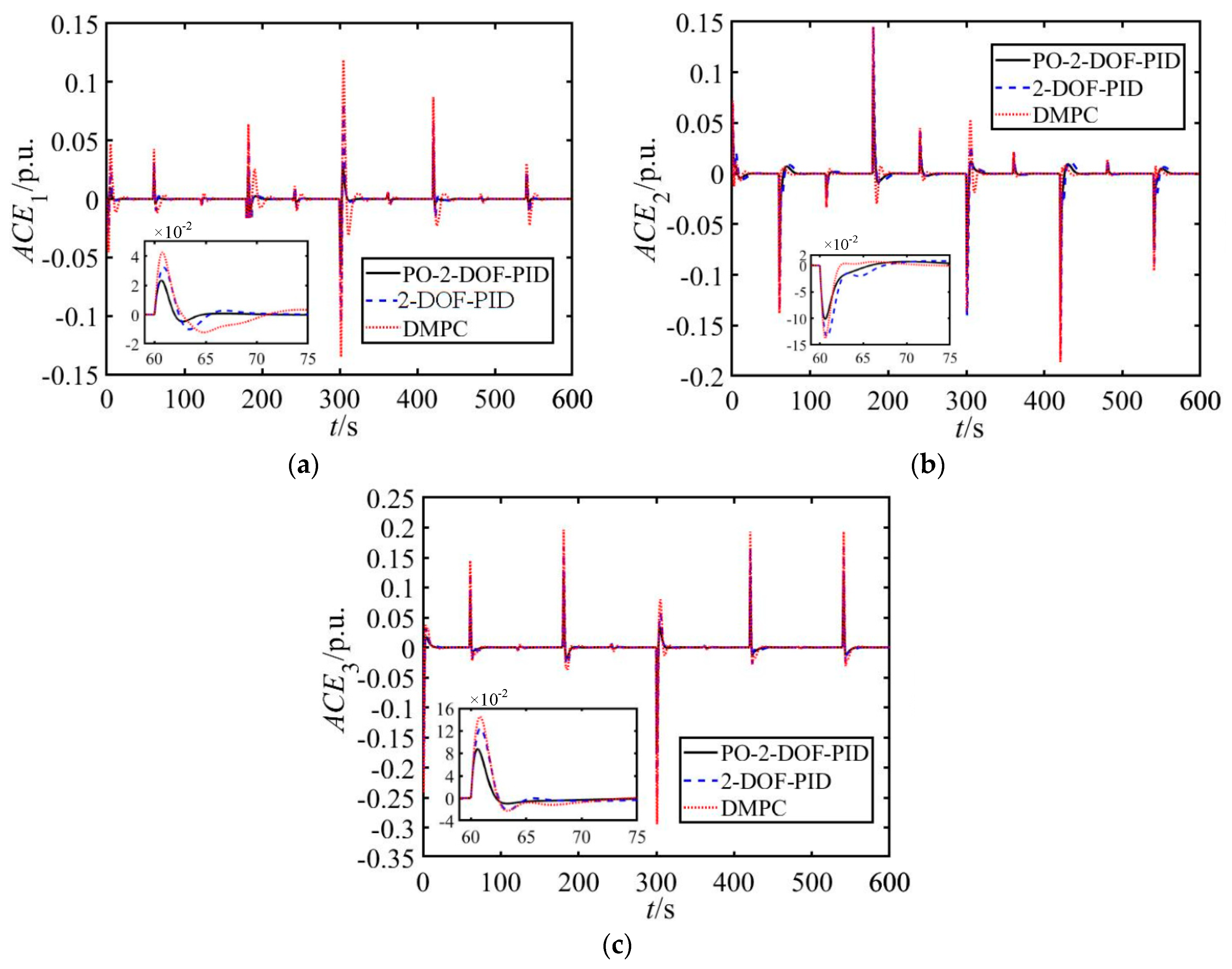
4. Simulation and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kiviluoma, J.; Holttinen, H.; Weir, D.; Scharff, R.; Söder, L.; Menemenlis, N.; Cutululis, N.A.; Danti Lopez, I.; Lannoye, E.; Estanqueiro, A.; et al. Variability in large-scale wind power generation. Wind Energy 2016, 19, 1649–1665. [Google Scholar] [CrossRef]
- Toulabi, M.; Bahrami, S.; Ranjbar, A.M. Optimal supplementary frequency controller design using the wind farm frequency model and controller parameters stability region. ISA Trans. 2018, 74, 175–184. [Google Scholar] [CrossRef] [PubMed]
- Tavakkoli, M.; Adabi, J.; Zabihi, S.; Godina, R.; Pouresmaeil, E. Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems. Energies 2018, 11, 2583. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Tavakoli, M.; Pouresmaeil, E.; Adabi, J.; Godina, R.; Catalão, J.P. Load-Frequency Control in a Multi-Source Power System Connected to Wind Farms through Multi Terminal HVDC Systems. Comput. Oper. Res. 2018, 96, 305–315. [Google Scholar] [CrossRef]
- Shankar, G.; Mukherjee, V. Quasi oppositional harmony search algorithm based controller tuning for load frequency control of multi-source multi-area power system. Int. J. Electr. Power Energy Syst. 2016, 75, 289–302. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Rout, U.K. DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity. Int. J. Electr. Power Energy Syst. 2013, 49, 19–33. [Google Scholar] [CrossRef]
- Zamani, A.; Barakati, S.M.; Yousofidarmian, S. Design of a fractional order PID controller using GBMO algorithm for load-frequency control with governor saturation consideration. ISA Trans. 2016, 64, 56–66. [Google Scholar] [CrossRef] [PubMed]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithm based PID plus second order derivative controller. Int. J. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Imsland, L.; Uhlen, K.; Fabozzi, D.; Thornhill, N.F. Model predictive load–frequency control taking into account imbalance uncertainty. Control Eng. Pract. 2016, 53, 139–150. [Google Scholar] [CrossRef]
- Mcnamara, P.; Milano, F. Model Predictive Control based AGC for Multi-terminal HVDC-connected AC grids. IEEE Trans. Power Syst. 2017, 33, 1036–1048. [Google Scholar] [CrossRef]
- Xu, Y.; Li, F.; Jin, Z.; Variani, M.H. Dynamic Gain-Tuning Control (DGTC) Approach for AGC with Effects of Wind Power. IEEE Trans. Power Syst. 2016, 31, 3339–3348. [Google Scholar] [CrossRef]
- Arya, Y. Automatic generation control of two-area electrical power systems via optimal fuzzy classical controller. J. Frankl. Inst. 2018, 355, 2662–2688. [Google Scholar] [CrossRef]
- Tummala, A.S.L.V.; Inapakurthi, R.; Ramanarao, P.V. Observer based sliding mode frequency control for multi-machine power systems with high renewable energy. J. Mod. Power Syst. Clean Energy 2018, 6, 473–481. [Google Scholar] [CrossRef]
- Ahmadi, A.; Aldeen, M. Robust overlapping load frequency output feedback control of multi-area interconnected power systems. Int. J. Electr. Power Energy Syst. 2017, 89, 156–172. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, L.; Wu, Q.H.; Zhou, X. Frequency Control of DFIG-Based Wind Power Penetrated Power Systems Using Switching Angle Controller and AGC. IEEE Trans. Power Syst. 2017, 32, 1553–1567. [Google Scholar] [CrossRef]
- Shaomin, Y.A.N.; Zhang, A.; Zhang, H.; Jianhua, W.A.N.G.; Bin, C.A.I. Optimized and coordinated model predictive control scheme for DFIGs with DC-based converter system. J. Mod. Power Syst. Clean Energy 2017, 5, 620–630. [Google Scholar]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2018, 12, 607–614. [Google Scholar] [CrossRef]
- Wang, Y.; Delille, G.; Bayem, H.; Guillaud, X.; Francois, B. High Wind Power Penetration in Isolated Power Systems—Assessment of Wind Inertial and Primary Frequency Responses. IEEE Trans. Power Syst. 2013, 28, 2412–2420. [Google Scholar] [CrossRef]
- Wickramasinghe, A.; Perera, S.; Agalgaonkar, A.P.; Meegahapola, L. Synchronous mode operation of DFIG based wind turbines for improvement of power system inertia. Renew. Energy 2016, 95, 152–161. [Google Scholar] [CrossRef]
- Fu, Y.; Zhang, X.; Hei, Y.; Wang, H. Active participation of variable speed wind turbine in inertial and primary frequency regulations. Electr. Power Syst. Res. 2017, 147, 174–184. [Google Scholar] [CrossRef]
- Chang-Chien, L.R.; Lin, W.T.; Yin, Y.C. Enhancing Frequency Response Control by DFIGs in the High Wind Penetrated Power Systems. IEEE Trans. Power Syst. 2011, 26, 710–718. [Google Scholar] [CrossRef]
- Wilchesbernal, F.; Chow, J.H.; Sanchezgasca, J.J. A Fundamental Study of Applying Wind Turbines for Power System Frequency Control. IEEE Trans. Power Syst. 2016, 31, 1496–1505. [Google Scholar] [CrossRef]
- Civelek, Z.; Lüy, M.; Çam, E.; Mamur, H. A new fuzzy logic proportional controller approach applied to individual pitch angle for wind turbine load mitigation. Renew. Energy 2017, 111, 708–717. [Google Scholar] [CrossRef]
- Lio, W.H.; Jones, B.L.; Rossiter, J.A. Preview predictive control layer design based upon known wind turbine blade-pitch controllers. Wind Energy 2017, 20, 1207–1226. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Sekhar, G.T.C. A novel hybrid PSO-PS optimized fuzzy PI controller for AGC in multi area interconnected power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 880–893. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Lee, K.Y. Robust distributed MPC for load frequency control of uncertain power systems. Control Eng. Pract. 2016, 56, 136–147. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Guo, Q.; Sun, H.; Xue, Y. Distributed Model Predictive Control of a Wind Farm for Optimal Active Power Control Part I: Clustering-Based Wind Turbine Model Linearization. IEEE Trans. Sustain. Energy 2017, 6, 831–839. [Google Scholar] [CrossRef]
- Spudić, V.; Jelavić, M.; Baotić, M. Wind Turbine Power References in Coordinated Control of Wind Farms. Autom. J. Control Meas. Electron. Comput. Commun. 2011, 52, 82–94. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Lee, K.Y. Coordinated Distributed MPC for Load Frequency Control of Power System with Wind Farms. IEEE Trans. Ind. Electron. 2017, 64, 5140–5150. [Google Scholar] [CrossRef]
- Singh, V.P.; Kishor, N.; Samuel, P. Communication time delay estimation for load frequency control in two-area power system. Ad Hoc Netw. 2016, 41, 69–85. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter/Variable | Description | Unit |
|---|---|---|
| Δfi(t) | Frequency deviation | Hz |
| ΔPgi(t) | Generator output power deviation | p.u. |
| ΔXgi(t) | Governor valve position deviation | p.u. |
| ΔPtie,i(t) | Tie-line active power deviation | p.u. |
| ΔPdi(t) | Load disturbance | p.u. |
| ΔPwi(t) | Wind power disturbance | p.u. |
| Mi | Generator moment of inertia | kg·m2 |
| Kri | Reheat turbine gain | Hz/p.u. |
| Di | Damping constant for area i | s |
| Tri | Reheat turbine time constant | s |
| Tgi | Thermal governor time constant | s |
| Tti | Turbine time constants | s |
| Tij | Interconnection gain between control areas | p.u. |
| Bi | Frequency bias factor | p.u./Hz |
| Ri | Speed drop due to governor action | Hz/p.u. |
| ACEi | Area control error | p.u. |
| Parameter | Area1 | Area2 | Area3 | Unit |
|---|---|---|---|---|
| Mi | 10.5 | 10 | 12 | kg·m2 |
| Di | 2.75 | 2.5 | 3 | s |
| Bi | 35 | 30 | 40 | p.u./Hz |
| Ri | 0.028 | 0.03 | 0.027 | Hz/p.u. |
| Tri | 10 | 10 | 8 | s |
| Tgi | 0.1 | 0.1 | 0.08 | s |
| Kri | 0.25 | 0.25 | 0.2 | Hz/p.u. |
| Tti | 0.2 | 0.2 | 0.15 | s |
| Tij | 0.868 | 0.867 | 0.866 | p.u. |
| Jr | 867637 | - | - | kg·m2 |
| Jg | 534.116 | - | - | kg·m2 |
| Ng | 97 | - | - | - |
| Kp | 0.019 | - | - | - |
| Ki | 0.008 | - | - | - |
| Controller Algorithms | Parameter | Area1 | Area2 | Area3 |
|---|---|---|---|---|
| 2-DOF-PID | KP | 0.9637 | 0.9276 | 0.9209 |
| KI | 0.8296 | 0.5632 | 0.8731 | |
| KD | 0.4562 | 0.4862 | 0.5034 | |
| Pw | 2.1068 | 2.6403 | 1.9866 | |
| Dw | 0.8469 | 0.8694 | 1.0134 | |
| PO-2-DOF-PID | KP | 0.9032 | 0.9586 | 0.9835 |
| KI | 0.9691 | 0.4846 | 0.8501 | |
| KD | 0.3543 | 0.3691 | 0.4305 | |
| Pw | 1.8077 | 2.5035 | 2.2156 | |
| Dw | 0.8969 | 0.7862 | 0.9861 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Lin, Z.; Fu, B.; He, L.; Fang, N. Research on Automatic Generation Control with Wind Power Participation Based on Predictive Optimal 2-Degree-of-Freedom PID Strategy for Multi-area Interconnected Power System. Energies 2018, 11, 3325. https://doi.org/10.3390/en11123325
Zhao X, Lin Z, Fu B, He L, Fang N. Research on Automatic Generation Control with Wind Power Participation Based on Predictive Optimal 2-Degree-of-Freedom PID Strategy for Multi-area Interconnected Power System. Energies. 2018; 11(12):3325. https://doi.org/10.3390/en11123325
Chicago/Turabian StyleZhao, Xilin, Zhenyu Lin, Bo Fu, Li He, and Na Fang. 2018. "Research on Automatic Generation Control with Wind Power Participation Based on Predictive Optimal 2-Degree-of-Freedom PID Strategy for Multi-area Interconnected Power System" Energies 11, no. 12: 3325. https://doi.org/10.3390/en11123325
APA StyleZhao, X., Lin, Z., Fu, B., He, L., & Fang, N. (2018). Research on Automatic Generation Control with Wind Power Participation Based on Predictive Optimal 2-Degree-of-Freedom PID Strategy for Multi-area Interconnected Power System. Energies, 11(12), 3325. https://doi.org/10.3390/en11123325