A Novel Control Strategy for Grid-Connected Inverter Based on Iterative Calculation of Structural Parameters


Abstract
1. Introduction
2. The Proposed Novel Control Strategy
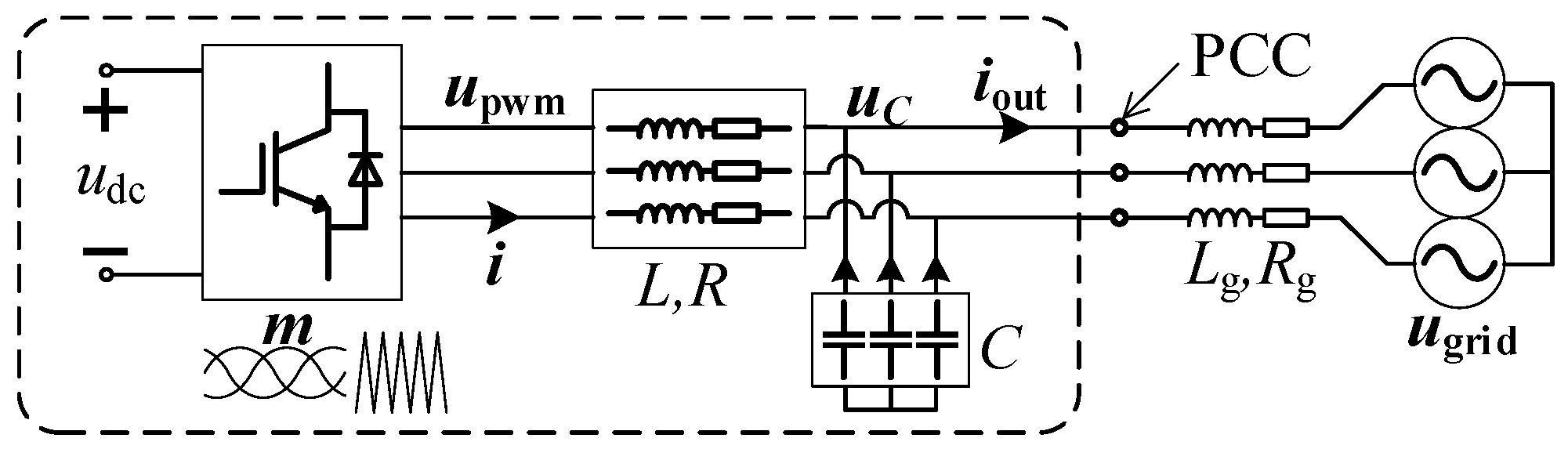
2.1. The Dq-Frame Model of Grid-Connected Inverter
2.2. The Structural Parameters to Be Determined
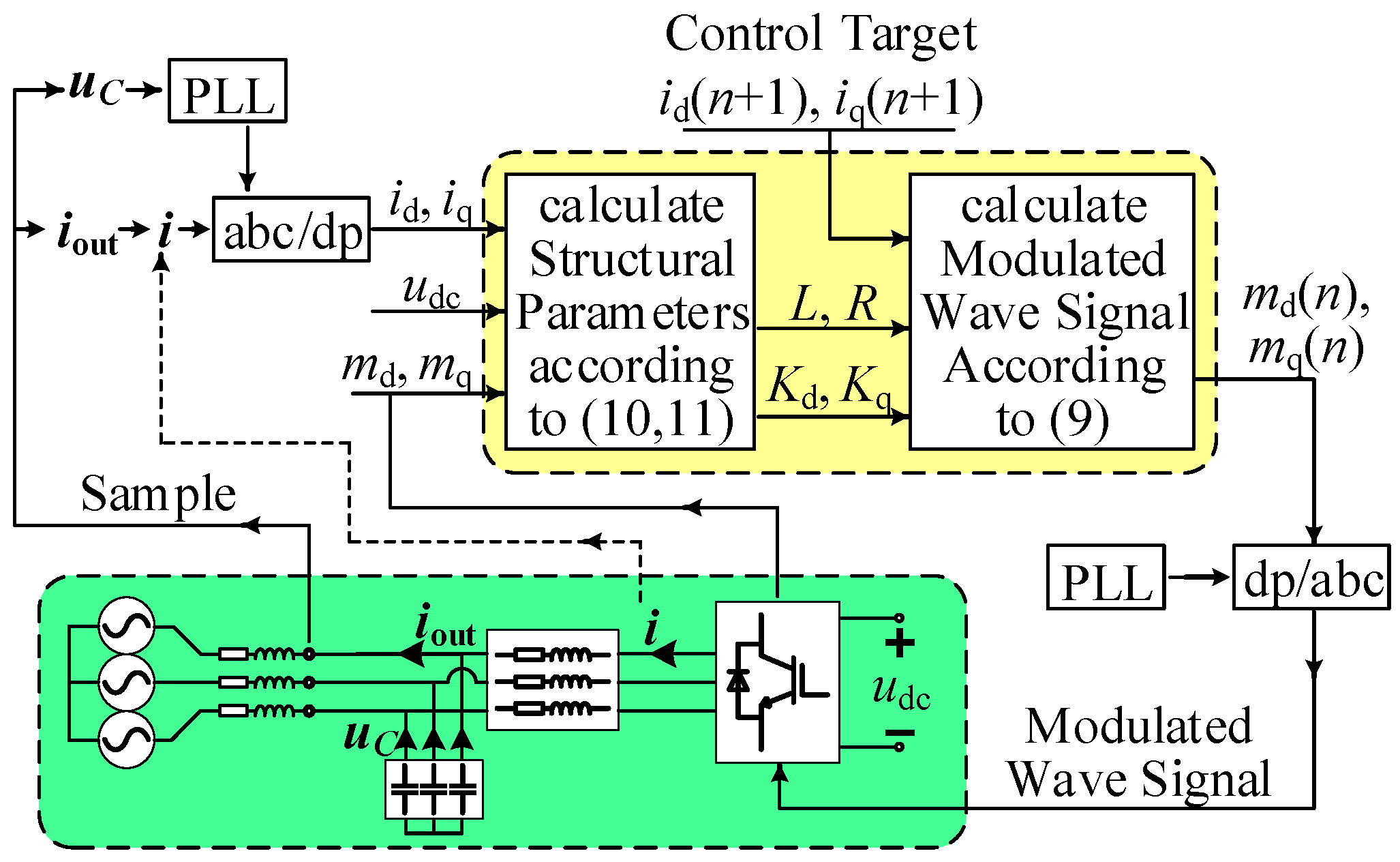
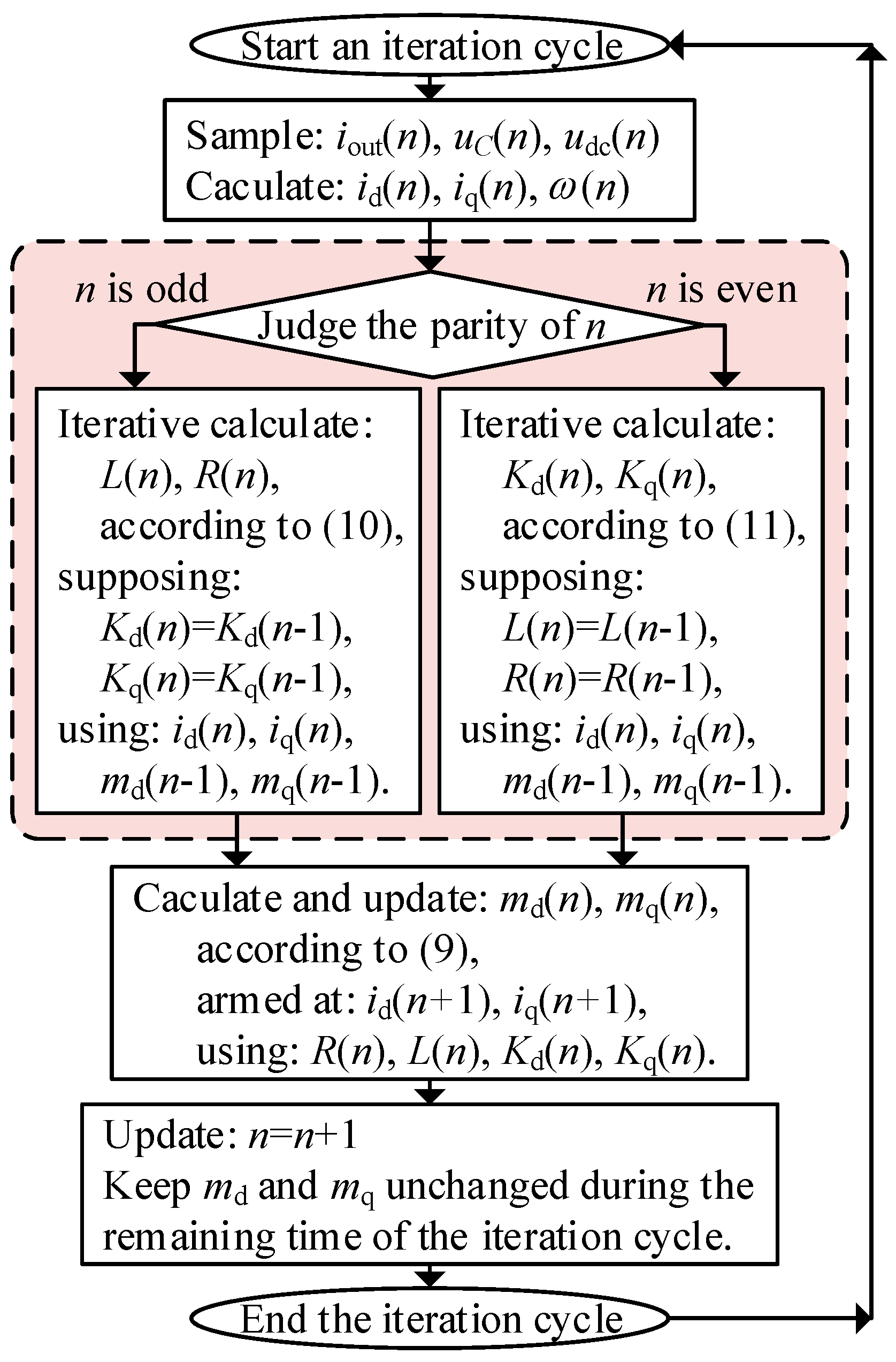
2.3. The Process of Iterative Calculation of Structural Parameters
2.4. The Initialization of the Iterative Calculation
3. Simulation Analysis
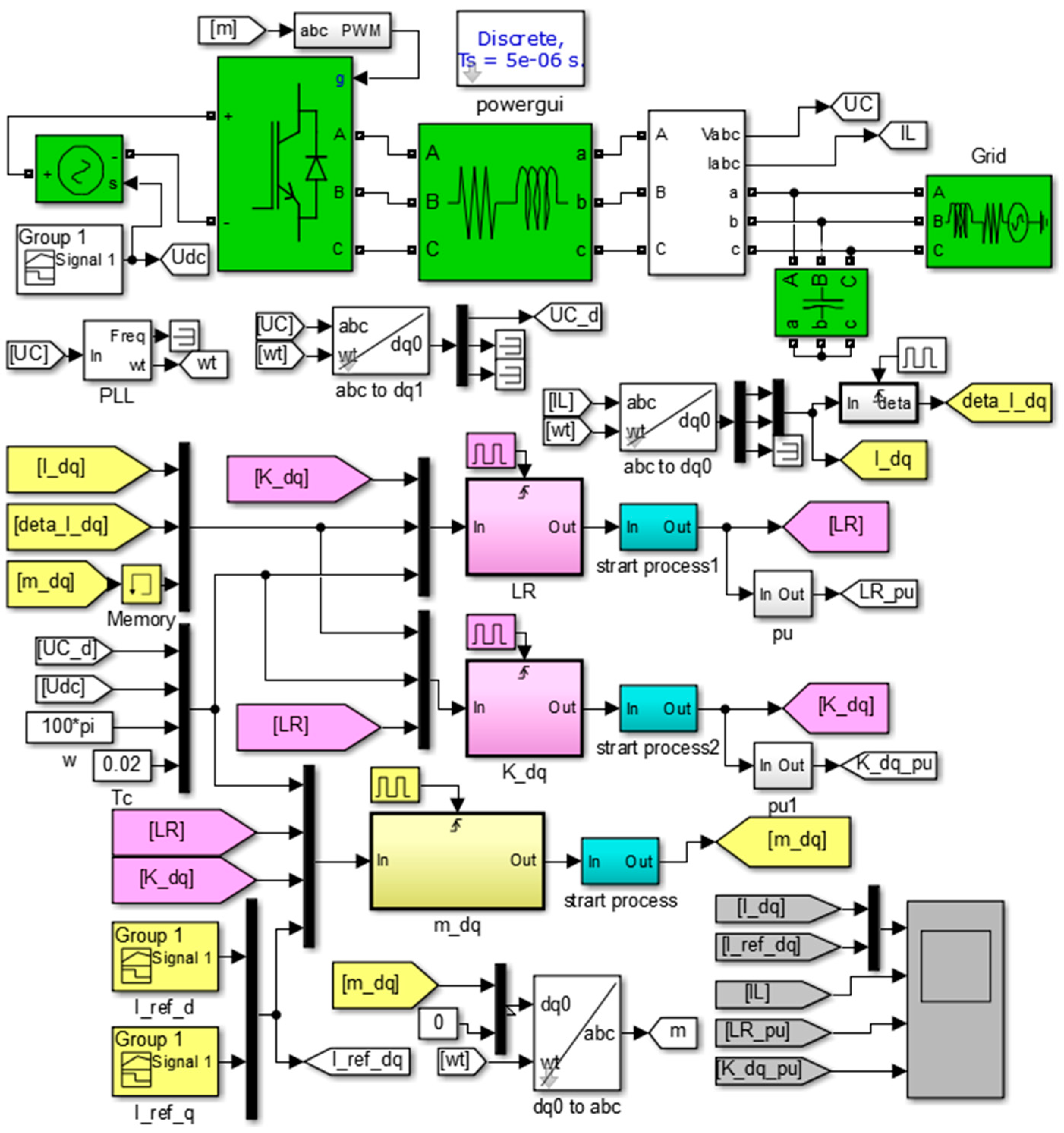
3.1. Simulation Model
3.2. Control Effect of the Proposed Strategy
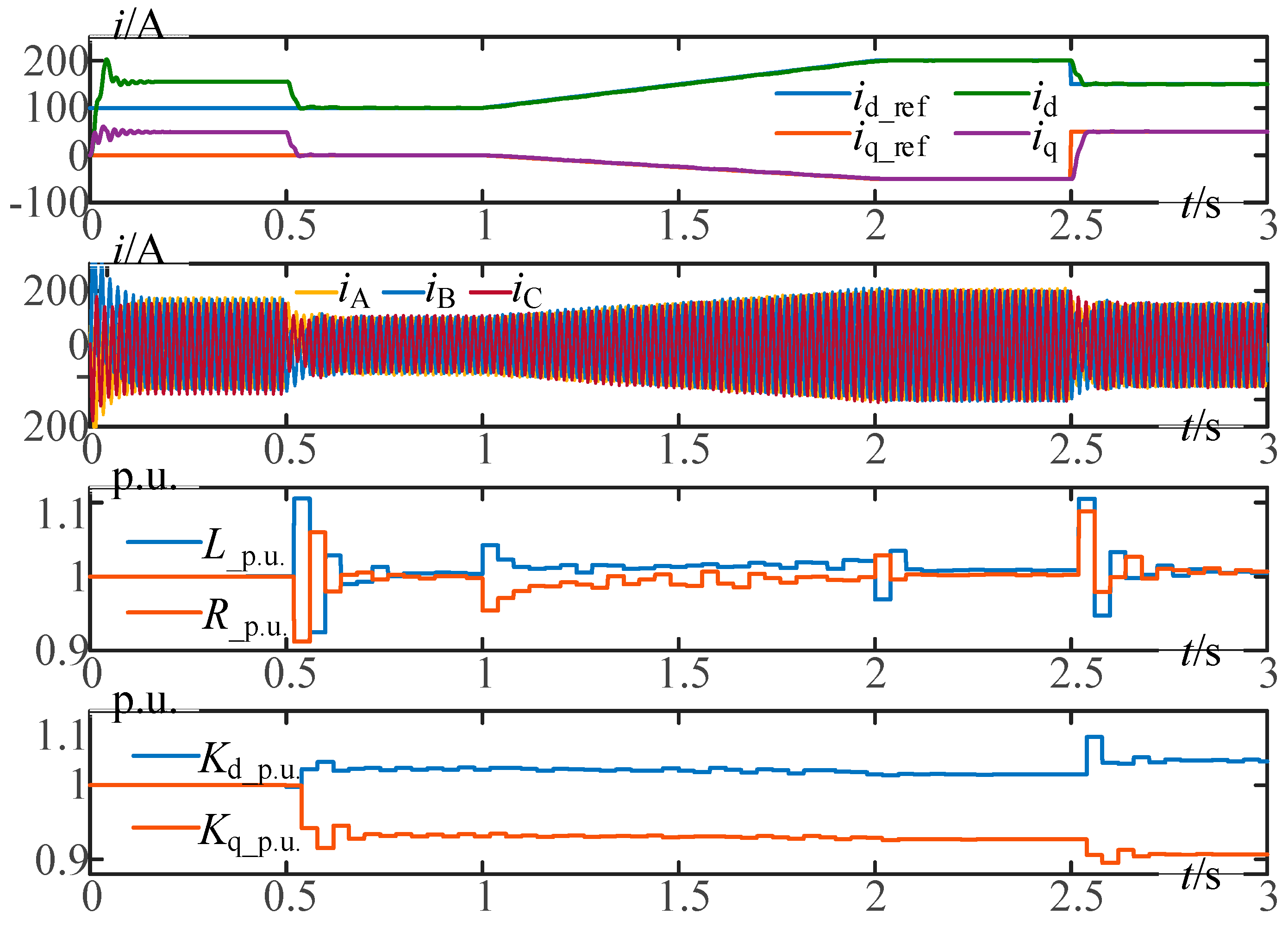
- This simulation shows the control effort of the proposed strategy, including the start-up process, interactive calculate process, and the responses of constants, step functions, and ramp functions.
- The start-up process lasts till 0.5 s. During this period, the inverter output currents do not follow the instruction, because md, mq are set artificially to 0.5. All of the p.u. of structural parameters are calculated according to their preset values, all their standard values are 1. After the current is completely stable around 0.5 s, the iterative calculation starts.
- In the iterative calculation process after 0.5 s, the four structural parameters are all shifting, but the ranges are all small, indicating that the calculated values of the structural parameters are constantly changing, but are not too far from the preset values.
- During 2–2.5 s, the reference current commands are constants. The measured currents are exactly the same as their corresponding reference currents, no-error tracking is achieved. During this period, all of the structural parameters almost do not change after the current is stable. This means the closed-loop system has already been treated as an open-loop one.
- During 1–2 s, the reference current commands are ramp functions. The measured currents are approximately consistent with their corresponding reference currents. This is because the control strategy uses a second-order model, and its id(n), iq(n) remain constant values during a ramp. During this period, the p.u. of structural parameters are varying slightly in a small range, despite the beginning and end points. The p.u. of L, R shift significantly at the beginning and end points, and decay rapidly. This is also because id(n), iq(n) change suddenly at the beginning and end of a ramp, but they will be updated to their suitable values quickly because of the iterative calculation strategy.
- A step occurs in the reference currents at 2.5 s. For the step response, we can see a period of response time, during which the structural parameters undergo large-scale numerical changes. This is because the inverter is treated as an open-loop process. Once the currents suddenly change, the filter inductance will force the currents to generate a DC component at the sudden change point of the phase, and the DC component decays rapidly because of the parasitic resistance, R. The three-phase current imbalance during the response time leads to inaccurate calculations of id, iq, and some other relevant parameters, but they will soon approach anther steady state, as the iterative calculation goes on, as shown in Figure 5.
- The proposed control strategy is effective for grid-connected inverter control.
- The proposed strategy can achieve no-error tracking for constants and ramp functions. The static performance is pretty good.
- During no-error tracking periods, the structural parameters stay fixed or change very little, which means that the closed-loop system has already been treated as an open-loop one.
- During step responses, the structural parameters change largely, and three-phase imbalance occurs in the output currents. The step response of the strategy needs further analysis.
3.3. Details of a Step Response of the Proposed Strategy
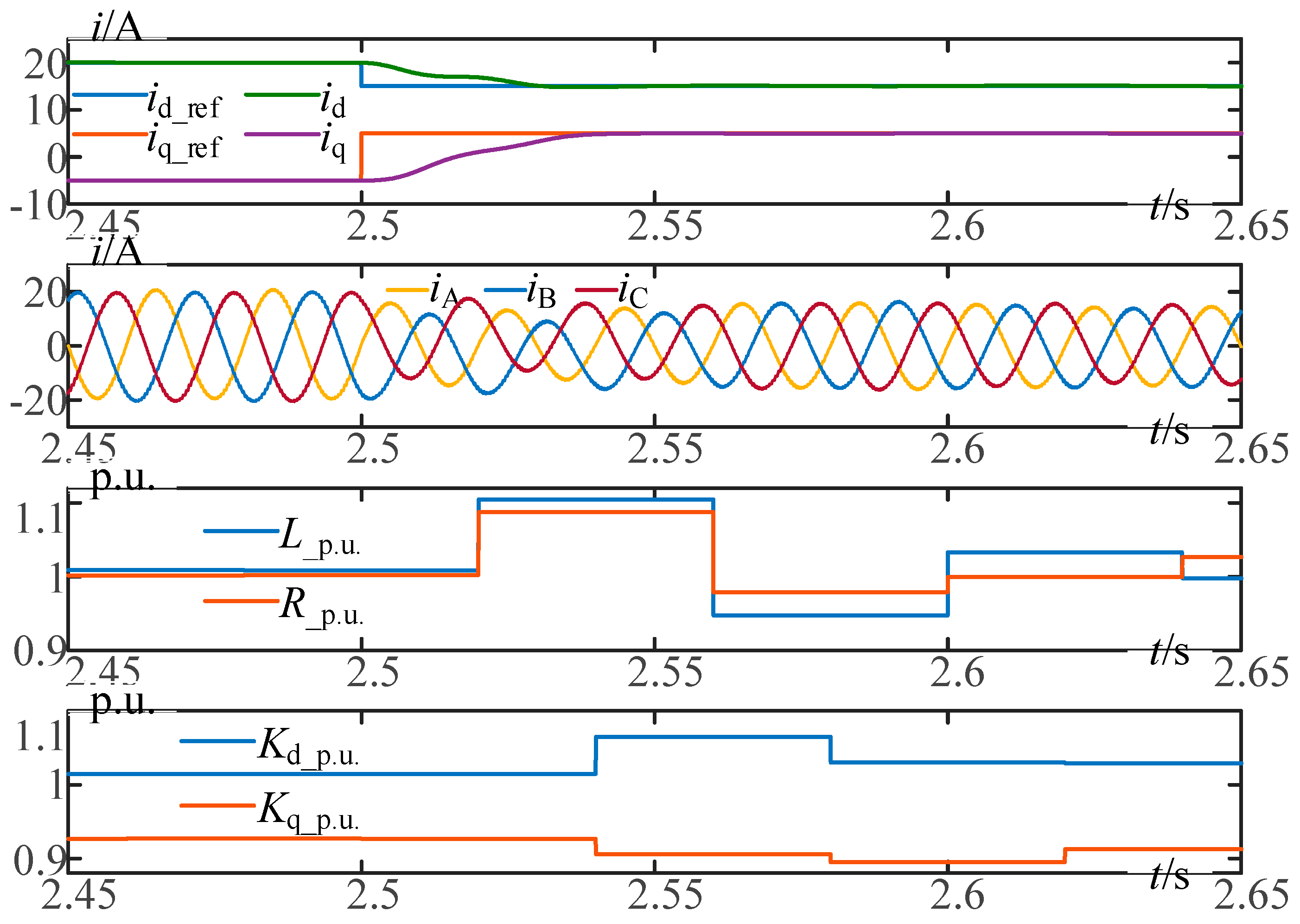
- The step occurs in the 2.5 s target reference current.
- After the step, md and mq immediately update according to (9), using the previous structural parameters. This process can be approximated as an open-loop process. The three-phase currents in the second screen are obviously imbalanced, resulting in the deviations of id, iq in the first screen.
- When comparing the third and the fourth screen, we can see that L, R, and Kd, Kq are updated alternately, which is consistent with the implementation of the strategy, shown in Figure 3.
- When a step occurs, it is necessary to wait until the next iteration cycle to update the values of L, R, and the values of Kd, Kq must wait until the next calculation cycle to be updated. That is the other reason why there is a response time in step response.
- The step response time lasts for about two cycles, during which no overshoot or oscillation, but only three-phase imbalance occurs in the output currents.
- During the step response, the structural parameters are updated in two groups, which means two iteration cycles are needed to complete the response in theory. But in practice, the response time lasts for only one cycle, which will be presented and explained in Section 4: Experimental Results.
- The only drawback of the strategy is three-phase current imbalance during one or two cycles after a step, which has limited negative impacts on grid. Thus, the dynamic performance is satisfying.
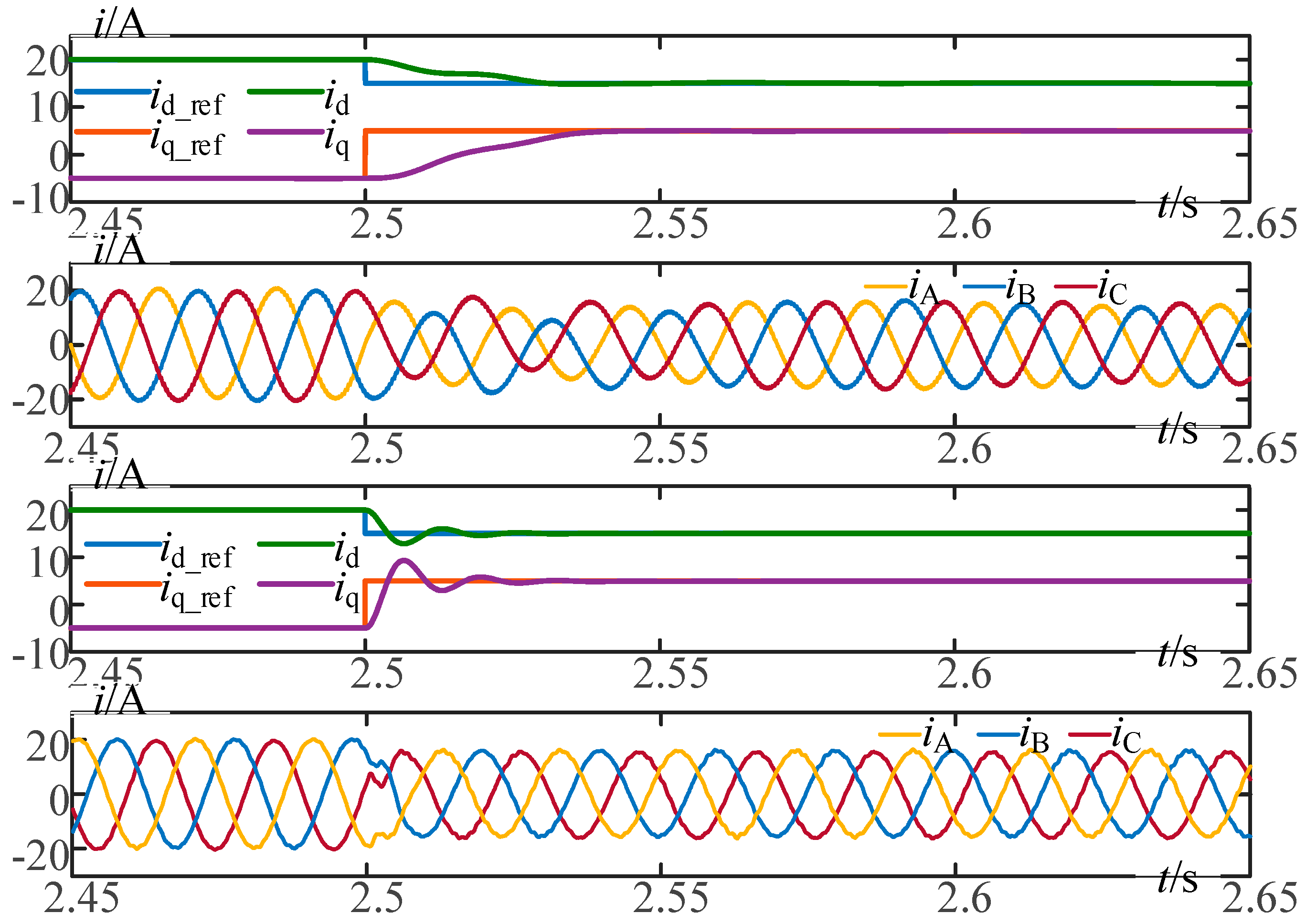
3.4. Comparasion of the Dynamic Performance on a Step Response
- The step response time of PI controller is about two cycles, which is nearly the same as that of the proposed strategy. There are evident overshoot and oscillation during the response time, as seen in the third screen.
- Adjusting PI parameters can affect the dynamic performance of the system to some extent. However, we can never get the ideal step response. Because if we want to improve the response speed, the overshoot and oscillation will intensify. On the other hand, if we want to suppress overshoot and oscillations, the response speed will slow down. Ref. [23] presented the detailed design and implementation of a PI controller for grid-connected inverter. Ref. [24] discussed the design of the digital PI controller used in grid-connected inverter.
- Using the PI controller, the output currents distort severely at the step time, as seen in the fourth screen. If the steps occur frequently for the randomness of sunlight intensity in practice, large amounts of harmonic current will be injected into the grid, which might cause some other serious problems on power quality, such as harmonic resonance.
- Using the proposed strategy, only three-phase current imbalance occurs during the response time, which has minimal negative impact on the grid. The following experimental results will prove and explain that the response time will be shorter in practice than that in simulation.
- The disadvantages of a PI controller are overshoot, oscillation and output current distortion, and the distortion might cause worse problem on power quality, such as harmonic resonance.
- The only drawback of the strategy is three-phase current imbalance, which has limited negative impacts on the grid.
- Neither of the methods can provide ideal step responses. Nevertheless, the proposed strategy is better in dynamic performance, for it causes less serious problems to the grid.
4. Experimental Results
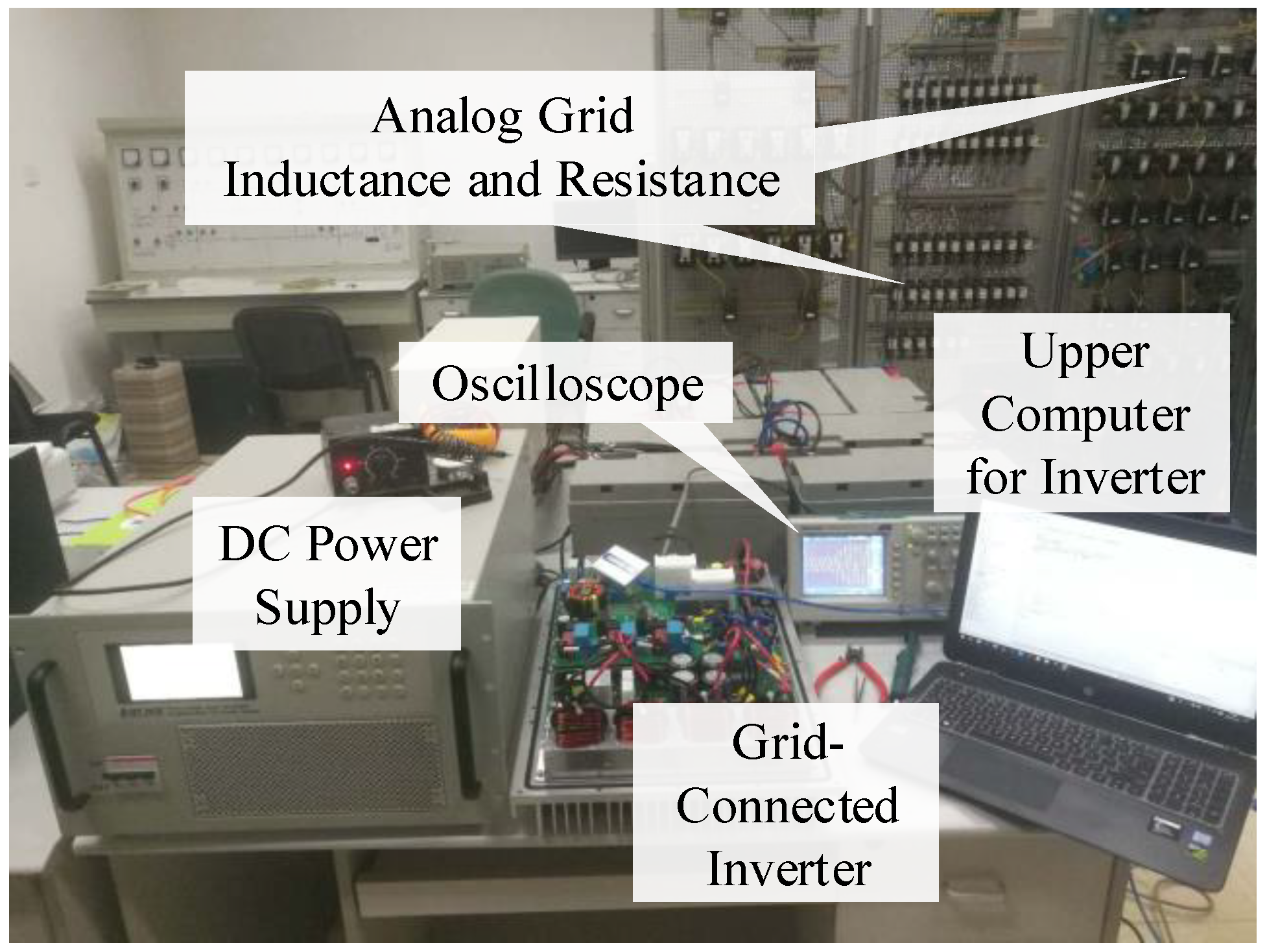
4.1. Experimental Platform
4.2. Static Performance
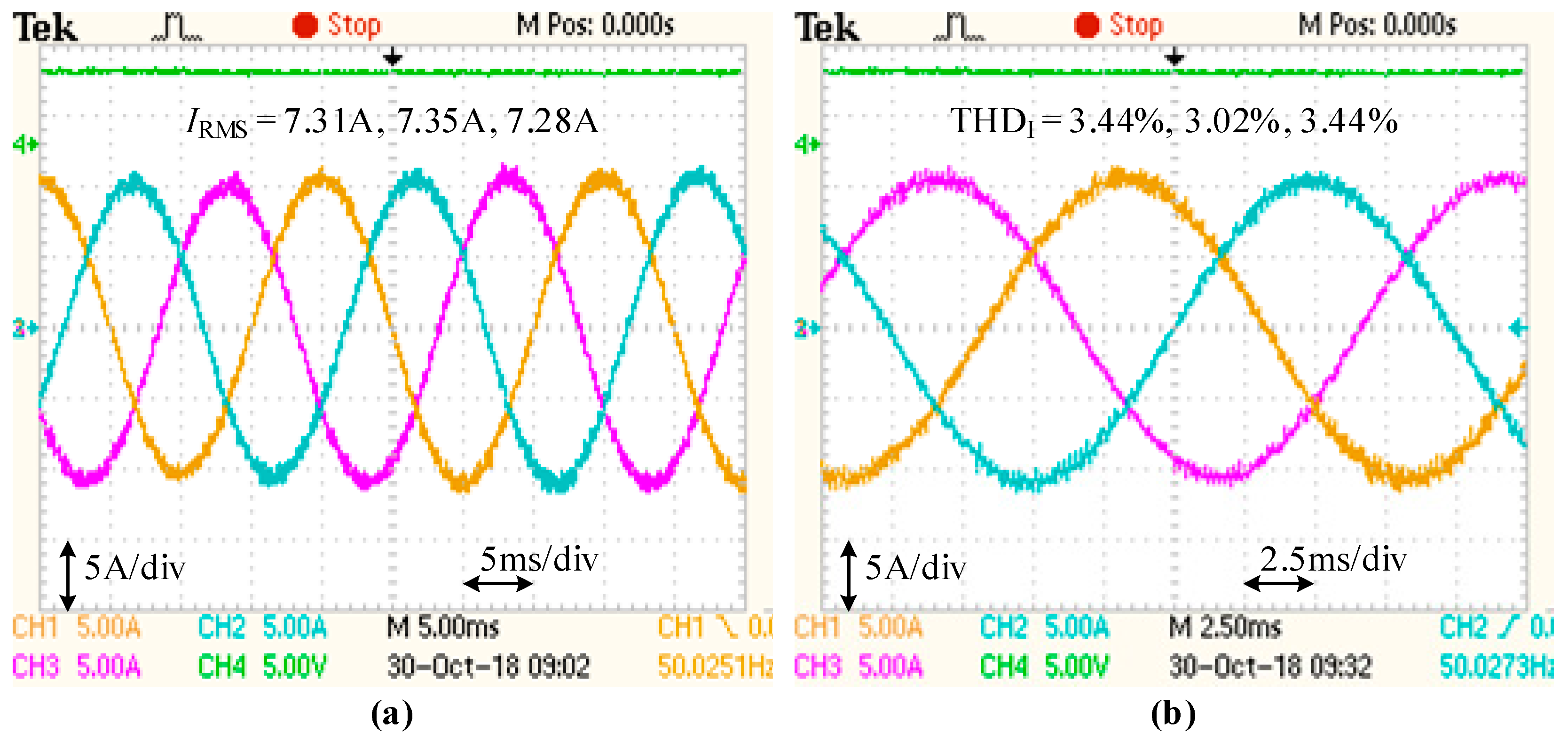
- Figure 9a shows that the measured three-phase current RMS are between 7.28 A to 7.35 A, while the theoretical output current RMS of the 5 kW inverter is 7.597 A, as calculated in (12).Considering the measurement error and grid voltage deviation (a little higher than rated value, measured about 394 V), the measured values are very close to the theoretical value. This experiment proves that the proposed strategy can achieve static no-error tracking.
- Figure 9b shows the power quality of the output currents. Even though there are some high-order harmonics, the waveforms are already very close to the ideal sine waves, with a THD of less than 3.5%. So, using the proposed strategy, the power quality of the inverter output is pretty good.
4.3. Dynamic Performance
- In Figure 10a, there is almost no oscillation during the response time. It seems like overshoot, but actually, it is three-phase imbalance, for we can see it clearly in Figure 10d. Both the two auxiliary segments at each time point are of equal length, but one of them cannot touch the boundary waveforms.
- The response time, or three-phase imbalance time, lasts for only one cycle, which is shorter than the simulation results. Theoretically, it needs two-cycle time to complete the iterative calculation and to update of the structural parameters. However, actually, the obvious three-phase imbalance only occurs within one cycle time. The three-phase imbalance may also occur in the following cycle, but it is so inconspicuous that it can be ignored. This is because the actual values of L and R are changing too slightly or slowly to affect the response of a step function, so only the updates of Kd, Kq can affect the response obviously.
- Except for the three-phase current imbalance for only one cycle, there is no other problems on power quality, such as waveform distortion and so on. The three-phase current imbalance has limited effect on the power system, therefore, the proposed control strategy has a good dynamic performance.
4.4. Comparison with PI Controller
- apparent overshoot and oscillations can be seen in Figure 11e during the step response time, even though no three-phase imbalance occurs. The response time lasts for a few cycles; and,
- the output current waveform distorts severely after the step, which means a lot of harmonic currents are injected into the grid at the step time.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Q.J.; Zhou, L.; Mao, M.X. Power quality and stability analysis of large-scale grid-connected photovoltaic system considering non-linear effects. IET Power Electron. 2018, 11, 1739–1747. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, X.M.; Zhao, M.Q. Impact of large-scale photovoltaic generation integration structure on static voltage stability in China’s Qinghai province network. J. Eng. 2017, 2017, 2048–2052. [Google Scholar] [CrossRef]
- Liu, J.H.; Zhou, L.; Marta, M. Damping region extension for digitally controlled LCL-type grid-connected inverter with capacitor-current feedback. IET Power Electron. 2018, 11, 1974–1982. [Google Scholar] [CrossRef]
- Joerg, D.; Friedrich, W.F.; Paul, B.T. PI State Space Current Control of Grid-Connected PWM Converters with LCL Filters. IEEE Trans. Power Electron. 2010, 25, 2320–2330. [Google Scholar]
- Roberto, A.F.; Claudio, A.B.; Jorge, A.S. Optimum PR Control Applied to LCL Filters with Low Resonance Frequency. IEEE Trans. Power Electron. 2018, 33, 793–801. [Google Scholar]
- Saeed, G.; Josep, M.G.; Juan, C.V. A PLL-Based Controller for Three-Phase Grid-Connected Power Converters. IEEE Trans. Power Electron. 2018, 33, 911–916. [Google Scholar]
- Francisco, D.F.; Ana, V.; Alejandro, G.Y. Tuning of Synchronous-Frame PI Current Controllers in Grid-Connected Converters Operating at a Low Sampling Rate by MIMO Root Locus. IEEE Trans. Ind. Electron. 2015, 62, 5006–5017. [Google Scholar]
- Fonkwe, F.E.; Xiao, W.D.; Vinod, K. Dynamic Modeling and Control of Interleaved Flyback Module-Integrated Converter for PV Power Applications. IEEE Trans. Ind. Electron. 2014, 61, 1377–1388. [Google Scholar]
- Yong, S.; Wu, W.J.; Wang, H.N. The Parallel Multi-Inverter System Based on the Voltage-Type Droop Control Method. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1332–1341. [Google Scholar]
- Liu, J.; Yushi, M.; Toshifumi, I. Comparison of Dynamic Characteristics between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Li, D.D.; Zhu, Q.W.; Lin, S.F. A Self-Adaptive Inertia and Damping Combination Control of VSG to Support Frequency Stability. IEEE Trans. Energy Conver. 2017, 32, 397–398. [Google Scholar] [CrossRef]
- Shi, K.; Ye, H.H.; Xu, P.F. Low-voltage ride through control strategy of virtual synchronous generator based on the analysis of excitation state. IET Gener. Transm. Distrib. 2018, 12, 2165–2172. [Google Scholar] [CrossRef]
- Mao, M.Q.; Qian, C.; Ding, Y. Decentralized coordination power control for islanding microgrid based on PV/BES-VSG. CPSS Trans. Power Electron. Appl. 2018, 3, 14–24. [Google Scholar] [CrossRef]
- Naziha, H.; Mansour, S.; Abdel, A. Intelligent control of grid-connected AC–DC–AC converters for a WECS based on T–S fuzzy interconnected systems modelling. IET Power Electron. 2018, 11, 1507–1518. [Google Scholar]
- Subhendu, B.S.; Kundan, K.; Pravat, B. Lyapunov Based Fast Terminal Sliding Mode Q-V Control of Grid Connected Hybrid Solar PV and Wind System. IEEE Access 2018, 6, 39139–39153. [Google Scholar]
- Samir, K.; Marcelo, A.; Jose, R. Model Predictive Control: MPC’s Role in the Evolution of Power Electronics. IEEE Ind. Electron. Mag. 2015, 9, 8–21. [Google Scholar]
- Venkata, Y.; Bin, W. Model predictive decoupled active and reactive power control for high-power grid-connected four-level diode-clamped inverters. IEEE Trans. Ind. Electron. 2014, 61, 3407–3416. [Google Scholar]
- Venkata, Y.; Bin, W. Model-predictive control of grid-tied four-level diode-clamped inverters for high-power wind energy conversion systems. IEEE Trans. Power Electron. 2014, 29, 2861–2873. [Google Scholar]
- Ming, C.; Feng, Y.; Chau, K.T. Dynamic Performance Evaluation of a Nine-Phase Flux-Switching Permanent-Magnet Motor Drive with Model Predictive Control. IEEE Trans. Ind. Electron. 2016, 63, 4539–4549. [Google Scholar]
- Lim, C.S.; Emil, L.; Martin, J. A Comparative Study of Synchronous Current Control Schemes Based on FCS-MPC and PI-PWM for a Two-Motor Three-Phase Drive. IEEE Trans. Ind. Electron. 2014, 61, 3867–3878. [Google Scholar] [CrossRef]
- Lim, C.S.; Emil, L.; Martin, J. FCS-MPC-Based Current Control of a Five-Phase Induction Motor and its Comparison with PI-PWM Control. IEEE Trans. Ind. Electron. 2014, 61, 149–163. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.Y.; Mohammad, B.S. Model Predictive Control of a Voltage-Source Inverter with Seamless Transition between Islanded and Grid-Connected Operations. IEEE Trans. Ind. Electron. 2017, 64, 7906–7918. [Google Scholar] [CrossRef]
- Errouissi, R.; Al-Durra, A.; Muyeen, S.M. Design and Implementation of a Nonlinear PI Predictive Controller for a Grid-Tied Photovoltaic Inverter. IEEE Trans. Ind. Electron. 2017, 64, 1241–1250. [Google Scholar] [CrossRef]
- Jeyraj, S.; Nasrudin, A.R. Multilevel Inverter for Grid-Connected PV System Employing Digital PI Controller. IEEE Trans. Ind. Electron. 2009, 56, 149–158. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | ||
|---|---|---|---|
| DC Voltage | (udc) | 700 ± 50 | V |
| Filter Inductor | (L) | 5 | mH |
| Parasitic Resistance | (R) | 0.1 | |
| Filter Capacitor | (C) | 150 | uF |
| Grid Inductor | (Lg) | 0.4 | mH |
| Grid Resistance | (Rg) | 0.01 | Ω |
| Grid Voltage | (Ugrid) | 220 | V |
| Carrier Frequency | (fc) | 3 | kHz |
| Iteration Cycle Time | (Tc) | 0.02 | s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Wang, D.; Yuan, T.; Liu, Z.; Yu, J. A Novel Control Strategy for Grid-Connected Inverter Based on Iterative Calculation of Structural Parameters. Energies 2018, 11, 3306. https://doi.org/10.3390/en11123306
Sun Z, Wang D, Yuan T, Liu Z, Yu J. A Novel Control Strategy for Grid-Connected Inverter Based on Iterative Calculation of Structural Parameters. Energies. 2018; 11(12):3306. https://doi.org/10.3390/en11123306
Chicago/Turabian StyleSun, Zhenao, Dazhi Wang, Tianqing Yuan, Zairan Liu, and Jiahui Yu. 2018. "A Novel Control Strategy for Grid-Connected Inverter Based on Iterative Calculation of Structural Parameters" Energies 11, no. 12: 3306. https://doi.org/10.3390/en11123306
APA StyleSun, Z., Wang, D., Yuan, T., Liu, Z., & Yu, J. (2018). A Novel Control Strategy for Grid-Connected Inverter Based on Iterative Calculation of Structural Parameters. Energies, 11(12), 3306. https://doi.org/10.3390/en11123306