Comparison of NARX and Dual Polarization Models for Estimation of the VRLA Battery Charging/Discharging Dynamics in Pulse Cycle





Abstract
:1. Introduction
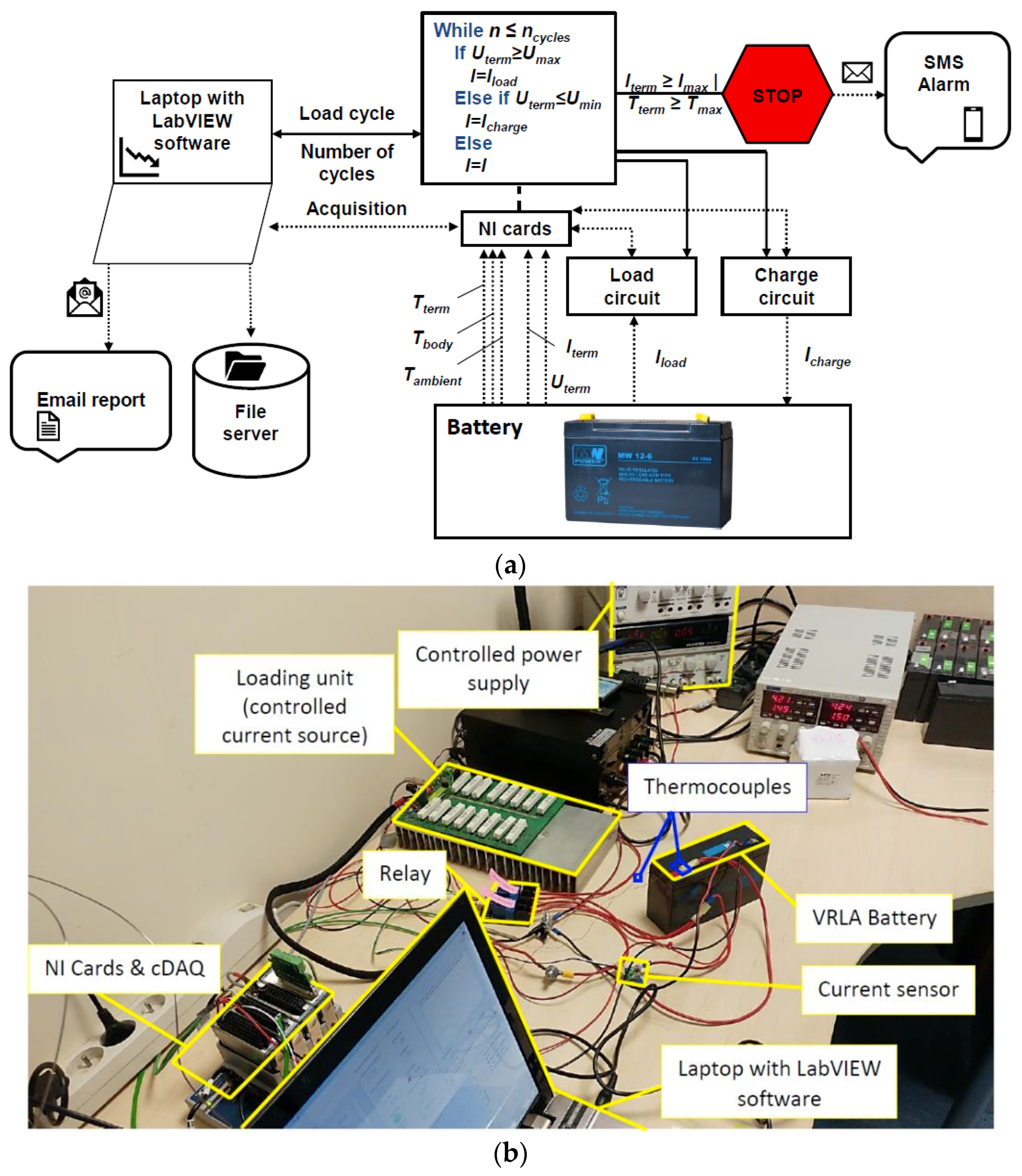
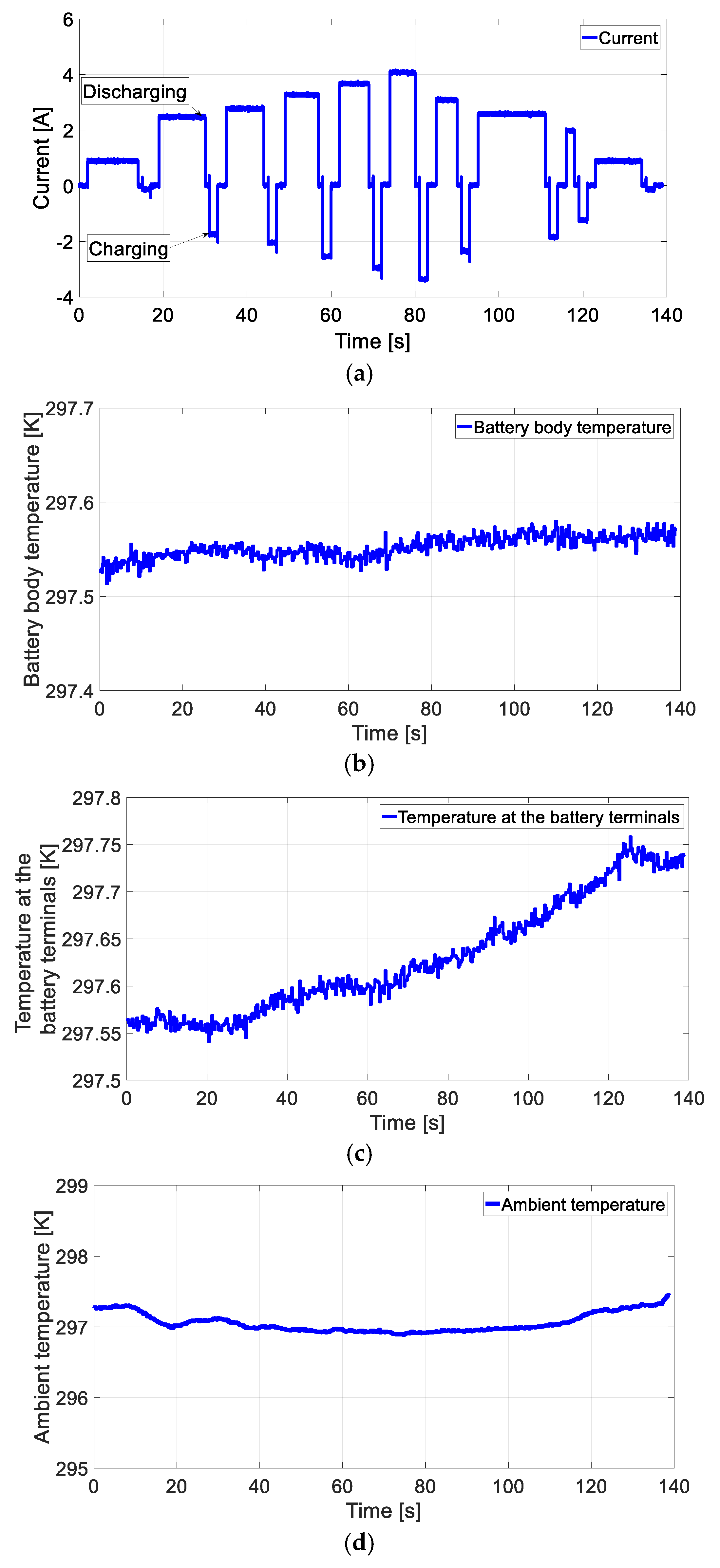
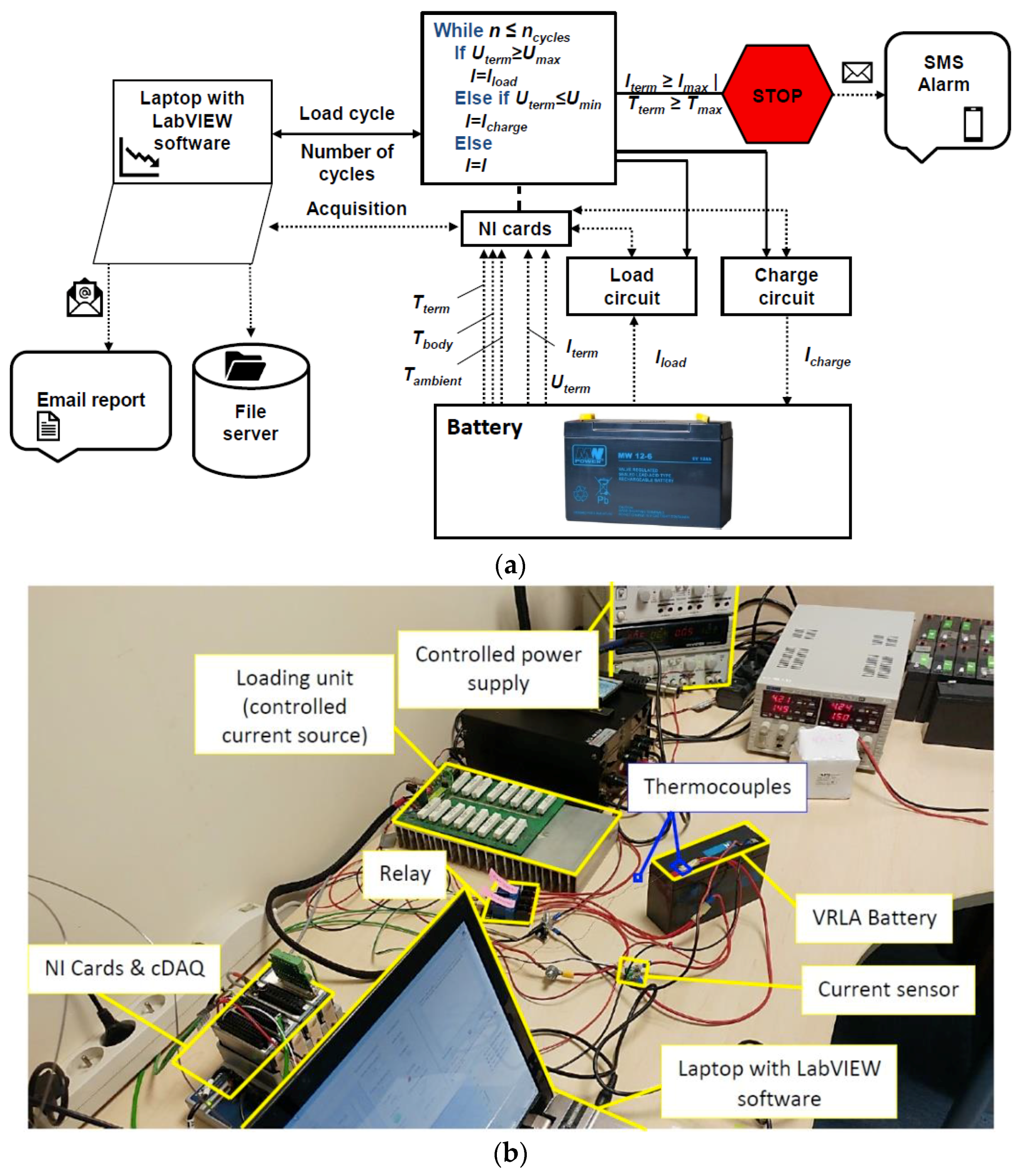
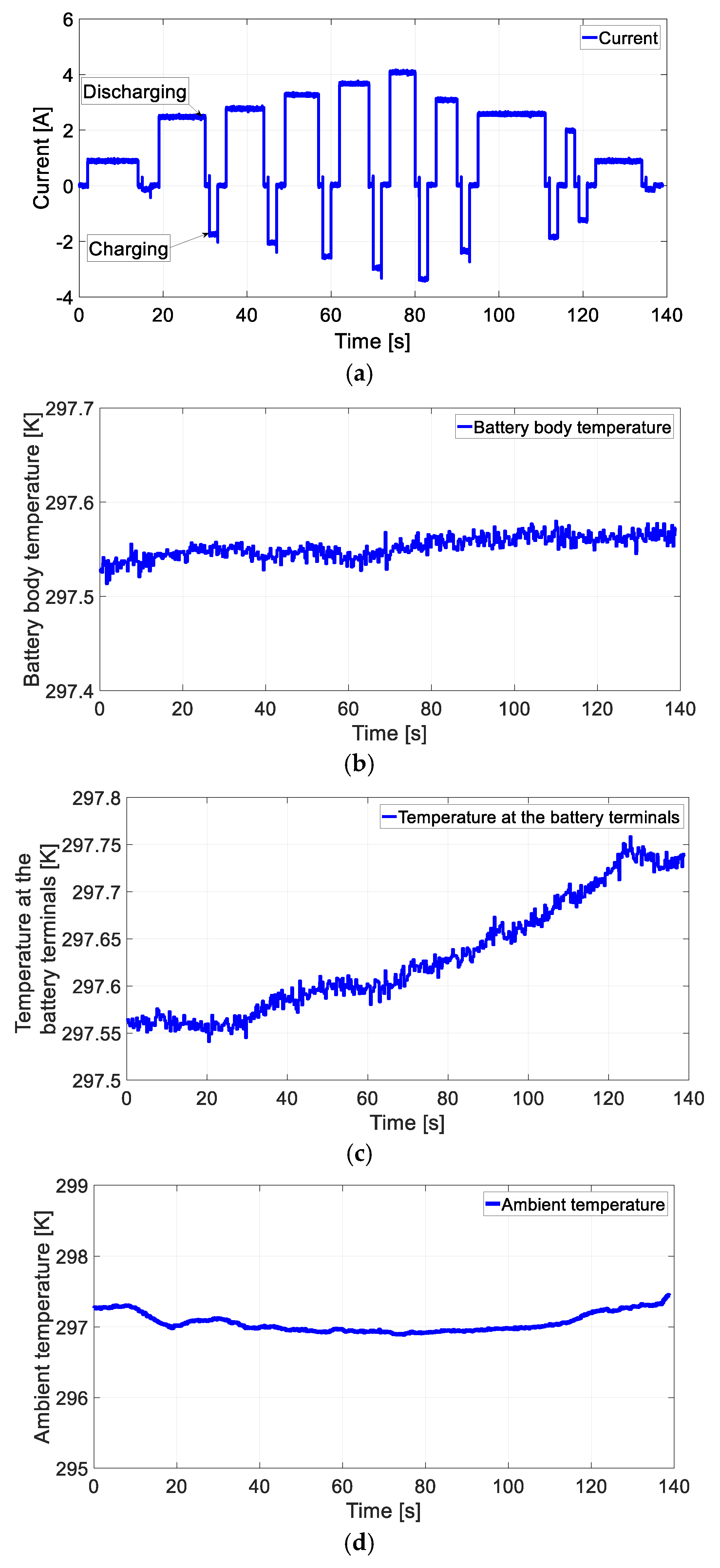
2. Test Stand Description
3. Battery Parameters Estimation Based on NARX Model and DP Physical Model
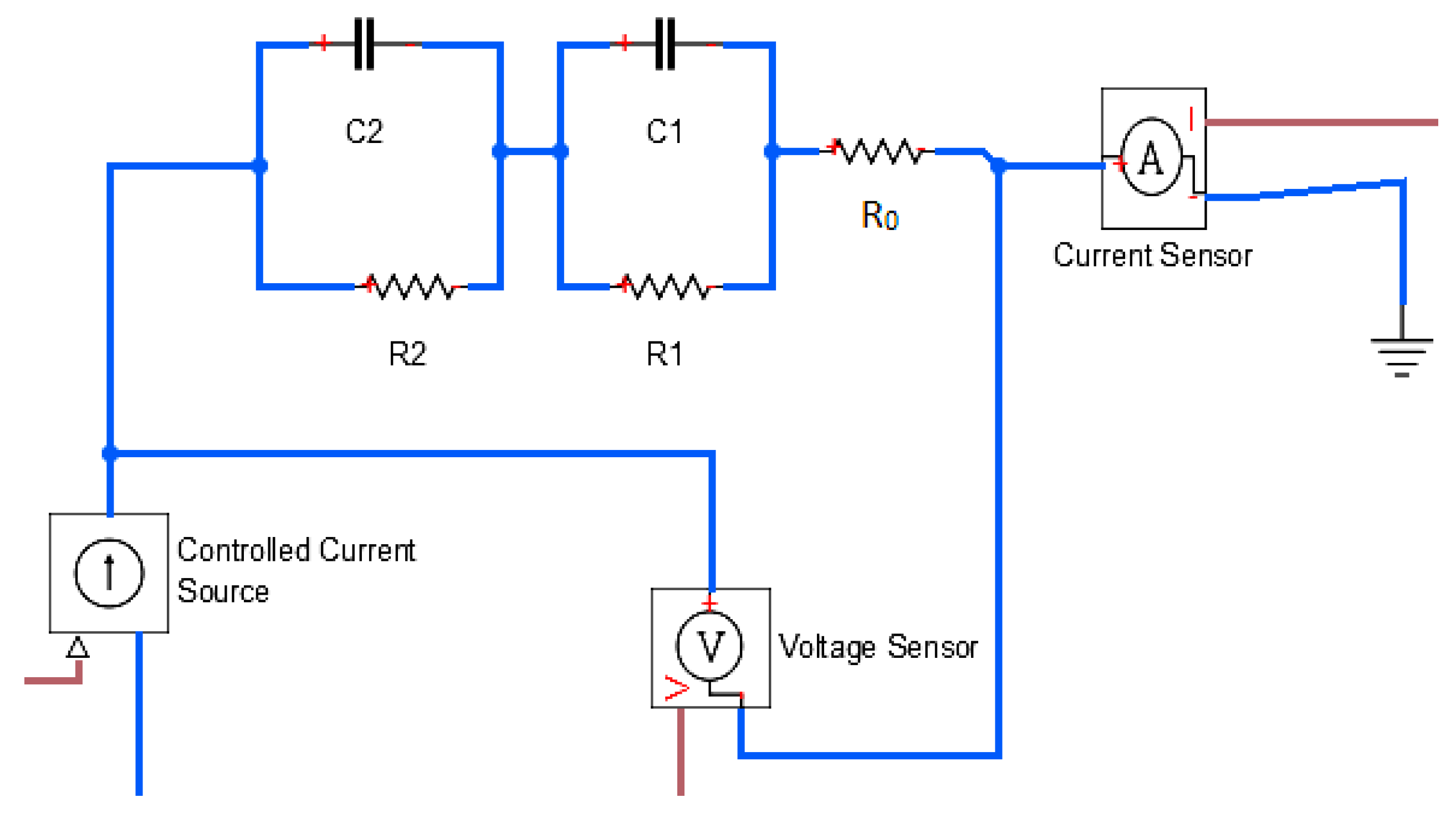
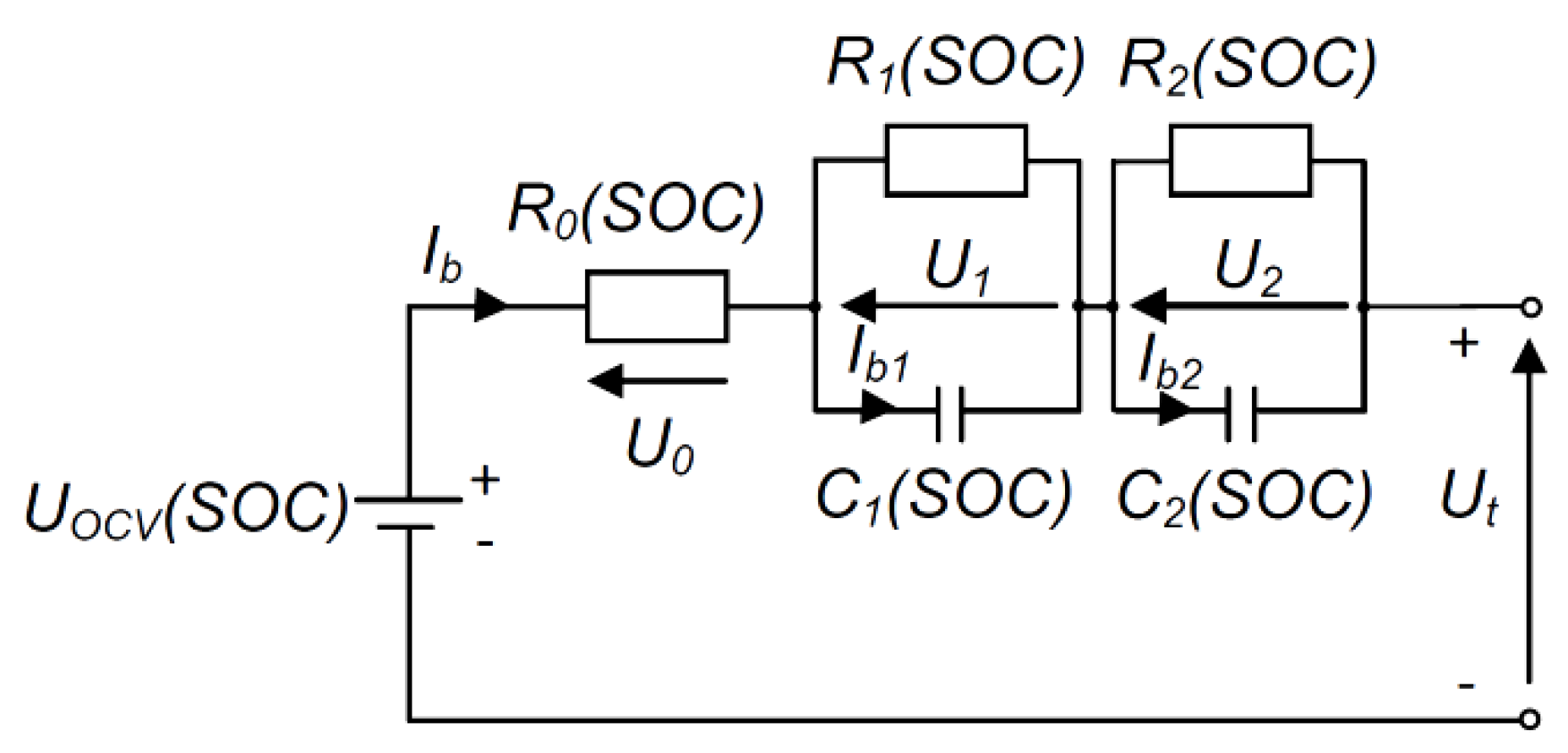
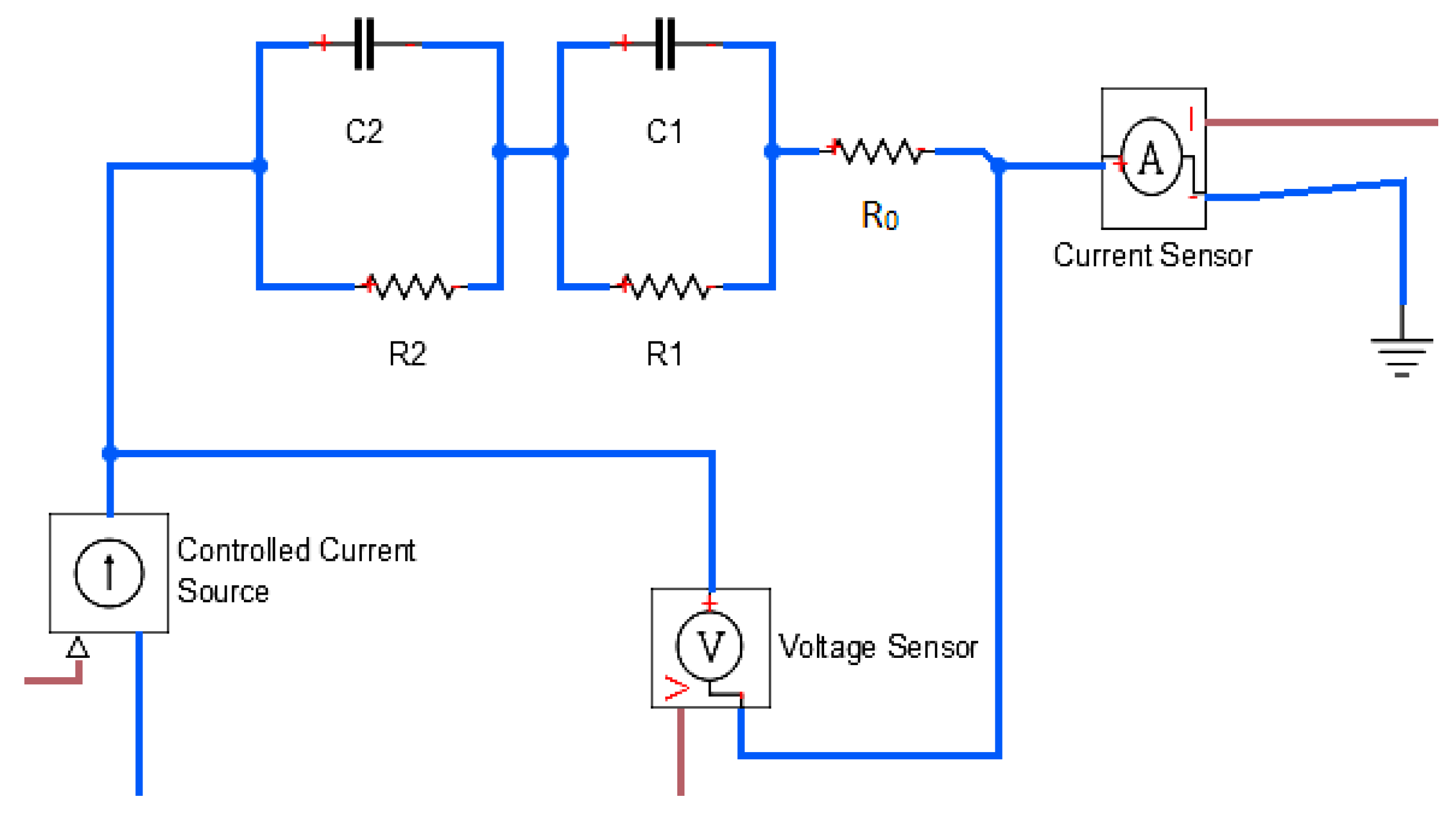
3.1. Dual Polarization (DP) Model Description and Parameters Identification
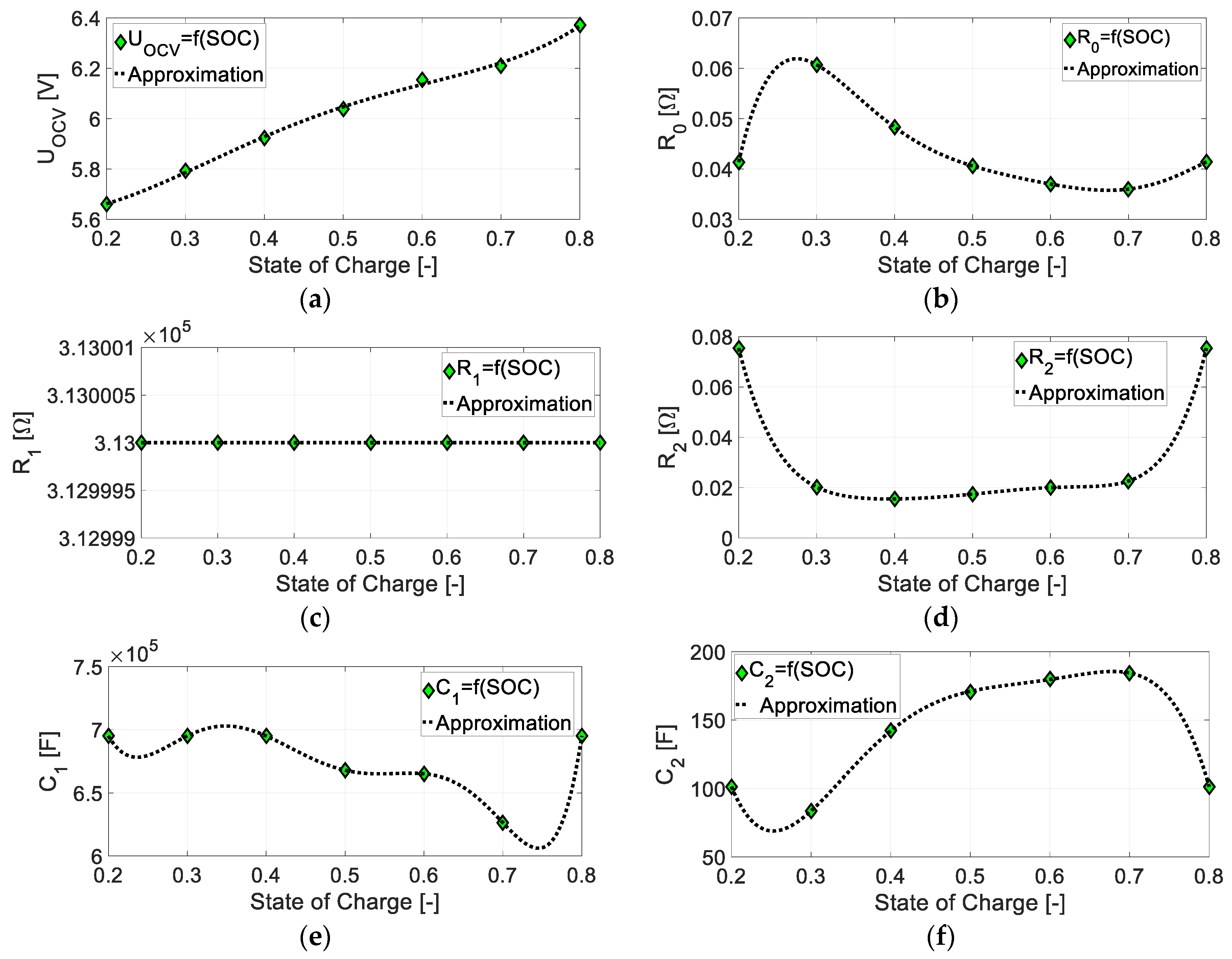
3.1.1. Parameters Identification of DP Model
3.2. NARX Model Description
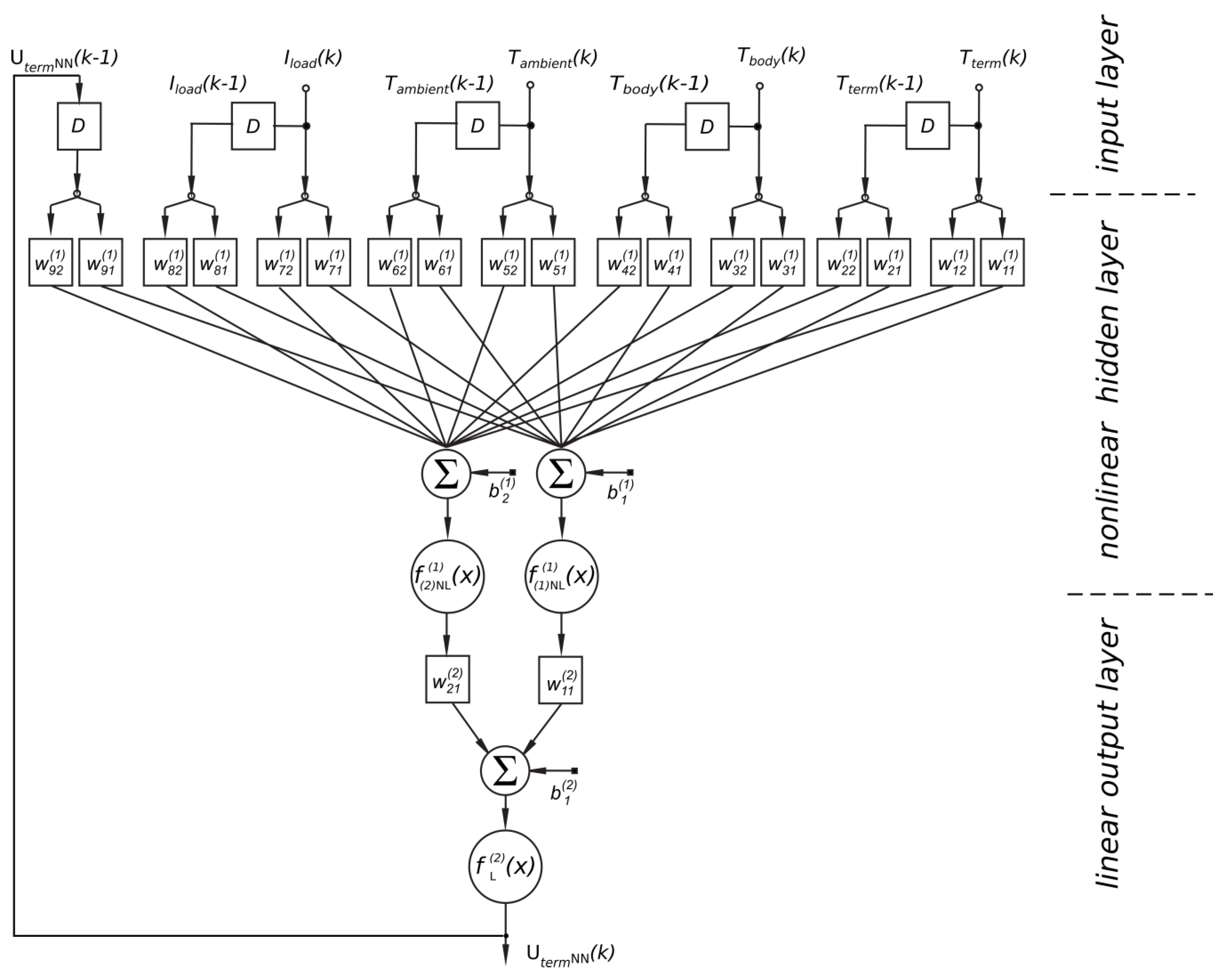
3.2.1. NARX-ANN Architecture
- UtermNN(k − 1), ..., UtermNN(k − nu): Previous values of outputs on which the actual output depends. These inputs are generated in the recurrent loop with tapped delay lines.
- Iload(k), ..., Iload(k − nI): Previous and delayed values of the current load signal.
- Tambient(k), ..., Tambient(k − na): Previous, delayed values of the ambient temperature.
- Tbody(k), ..., Tbody(k − nb): Previous, delayed values of the battery body temperature.
- Tterm(k), ..., Tterm(k − nt): Previous, delayed temperature at battery terminals.
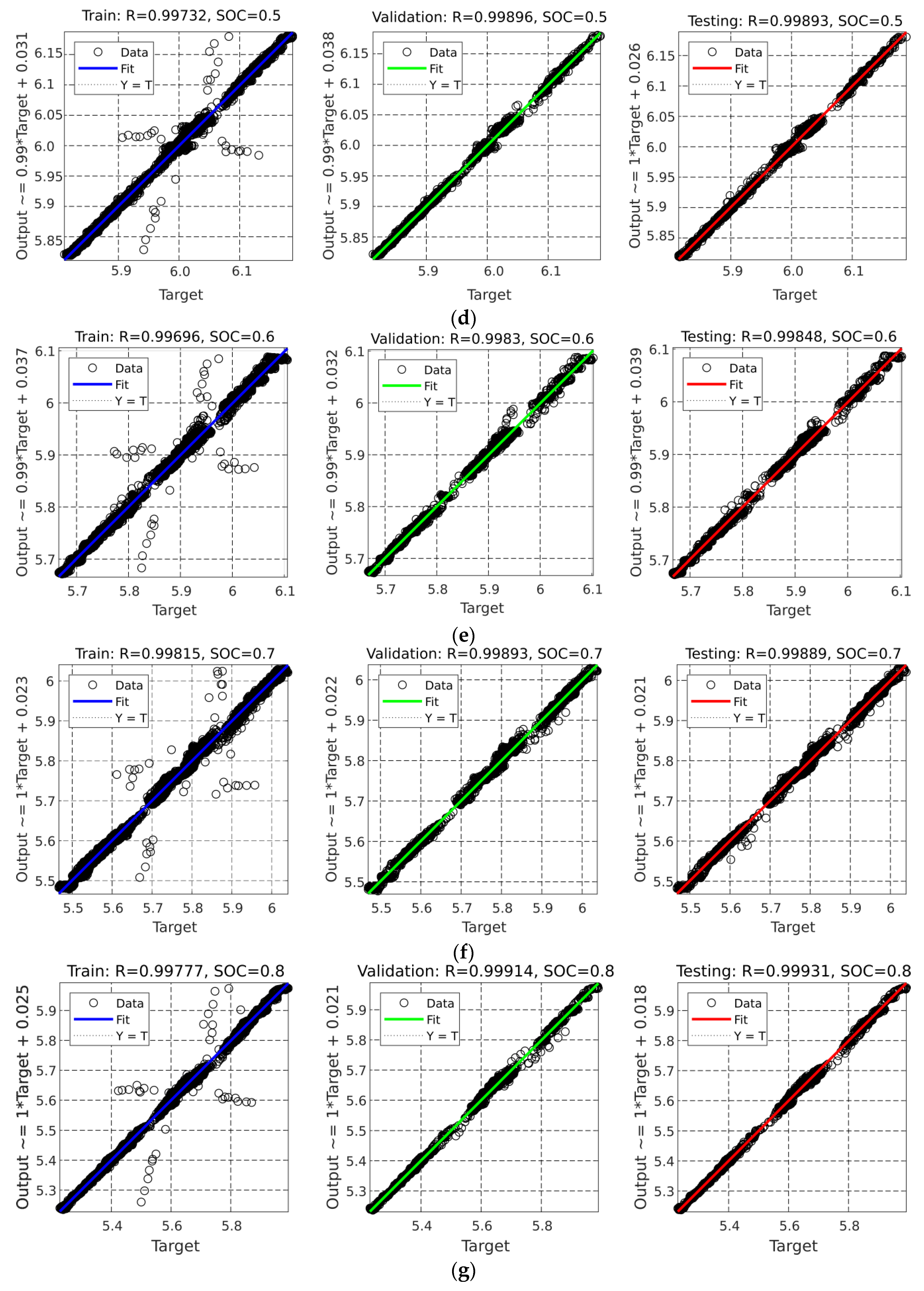
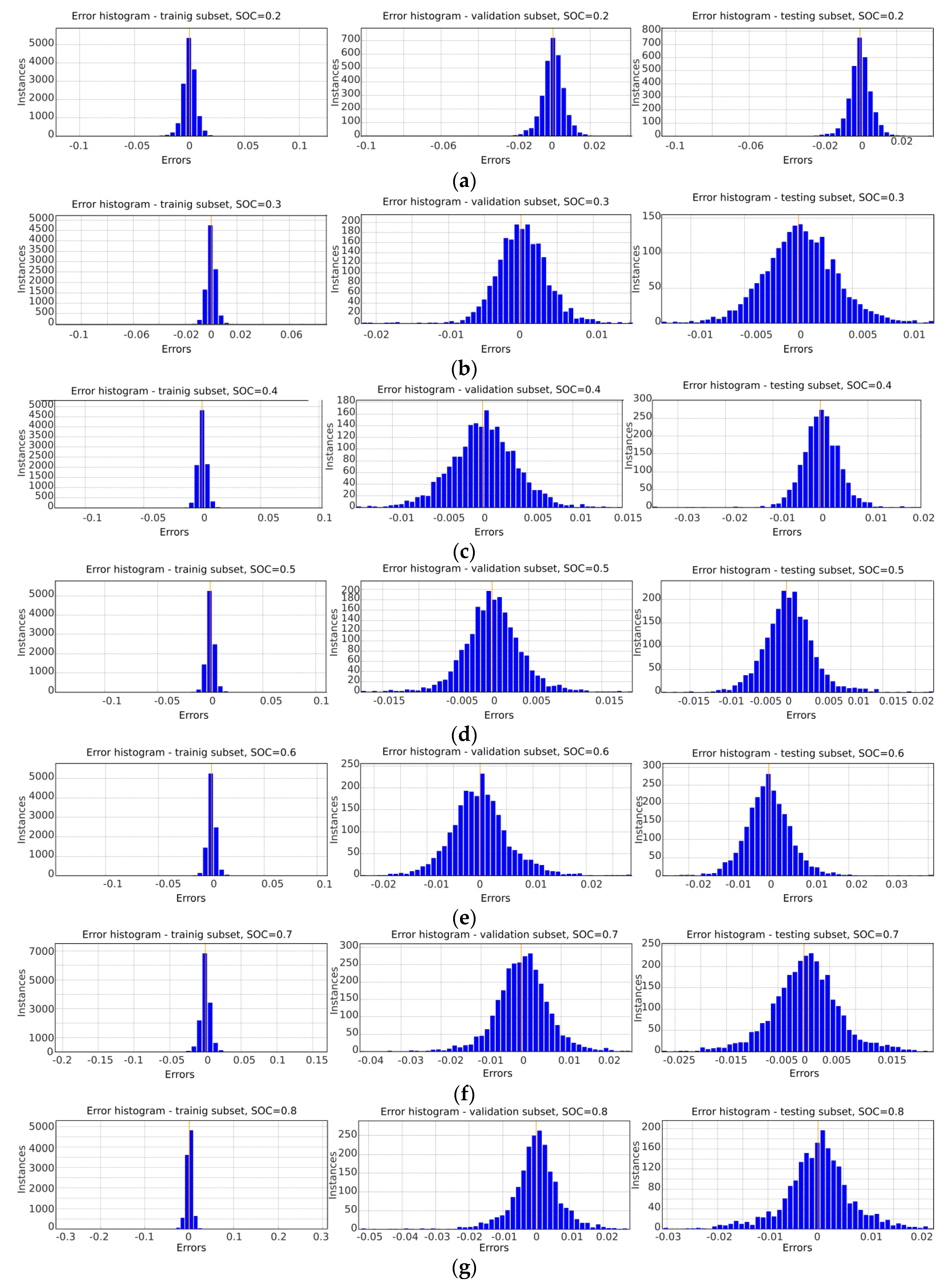
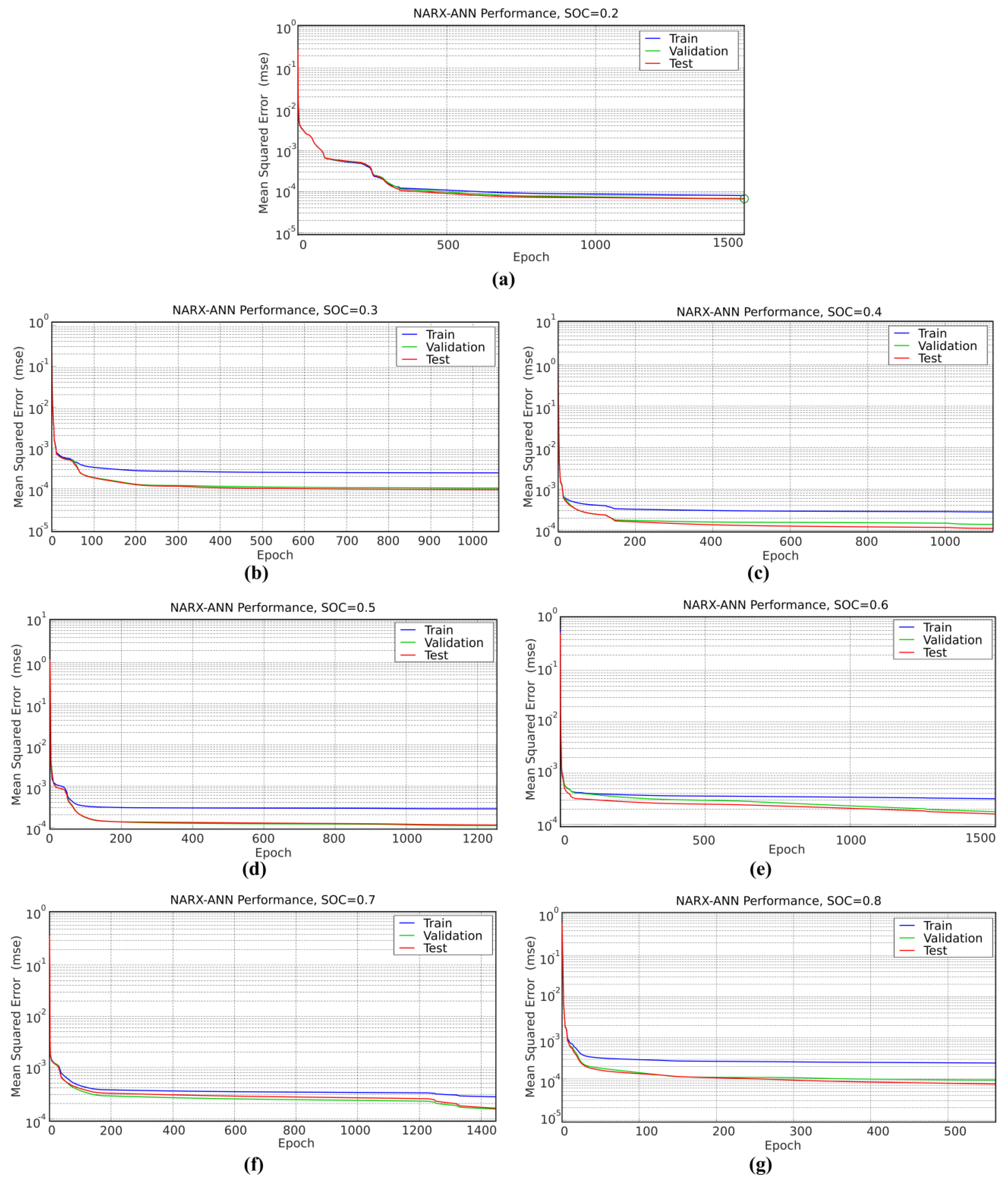
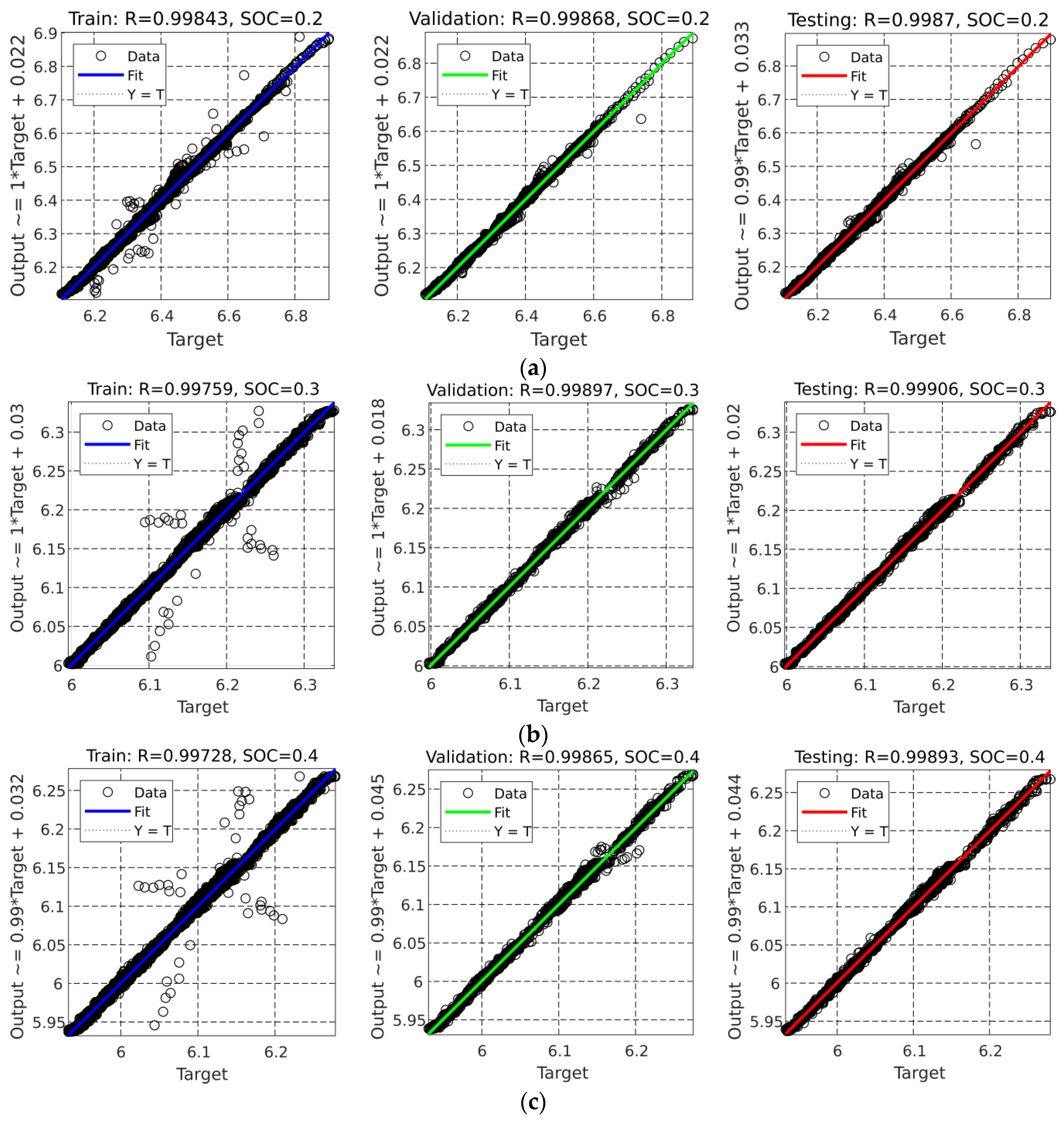
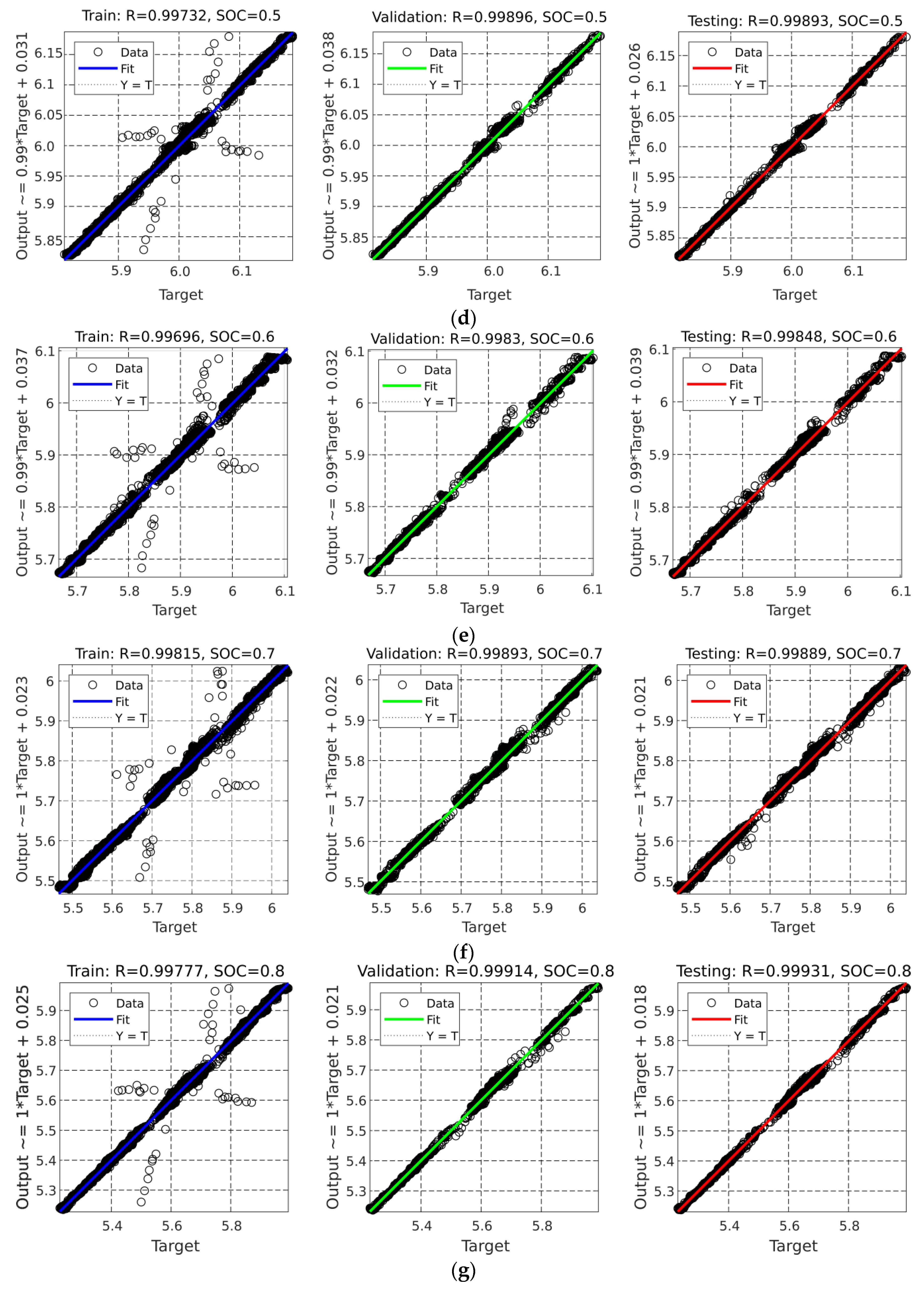
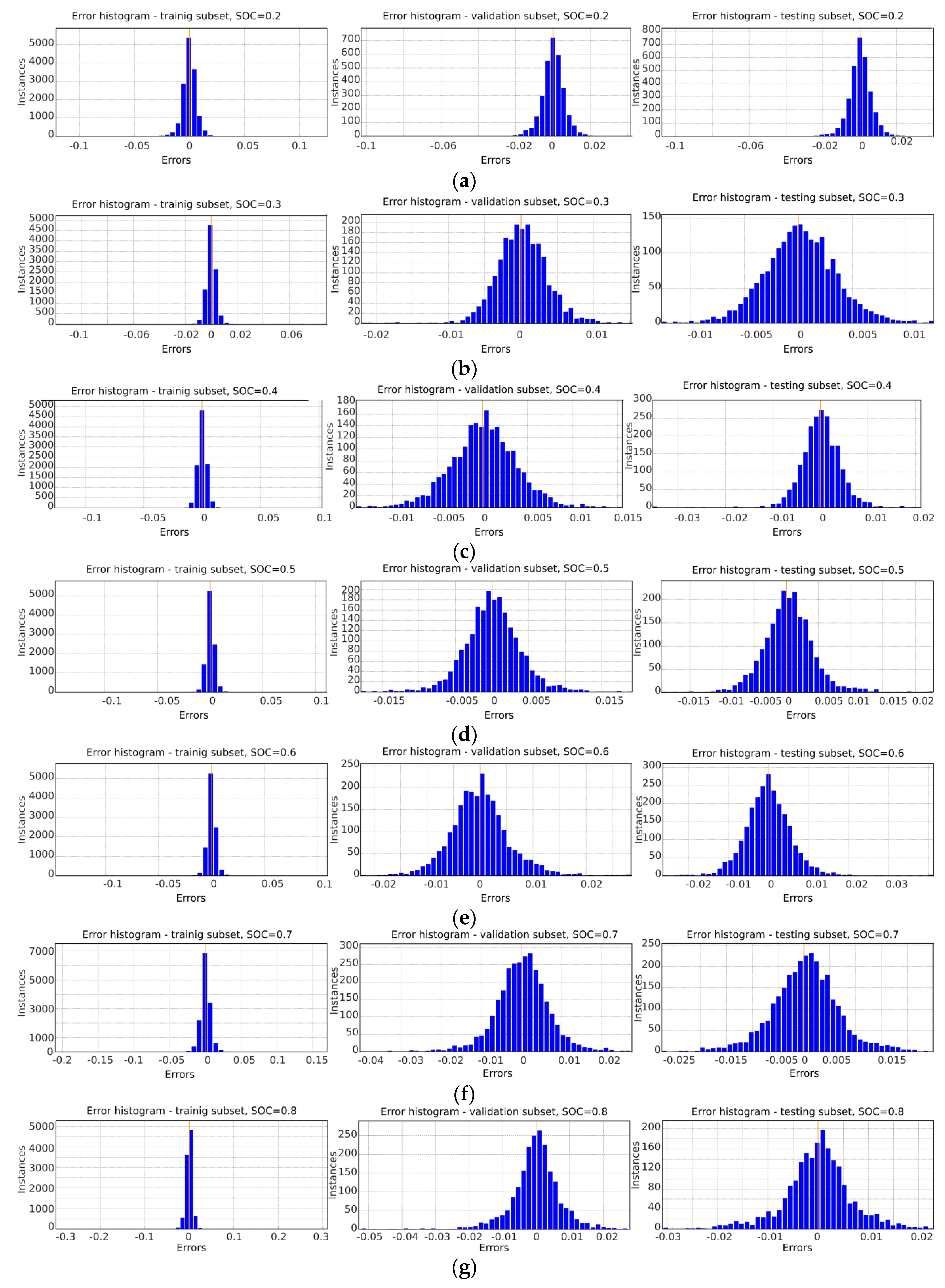
3.2.2. NARX-ANN Training
- Training dataset: Subset used updating the NARX-ANN weights and biases during network training.
- Validation dataset: Subset used to validate the NARX-ANN in every iteration during training. The performance function value on the validation set was monitored during the training. The rise of the error on the validation subset was an indication that the network begins to overfit the data. When the performance function for validation error increased for a specified number of iterations, the training stopped, and the weights and biases at the minimum of the validation error were chosen for the network.
- Testing dataset: Subset not used in the training, used to compare different models during evaluation.
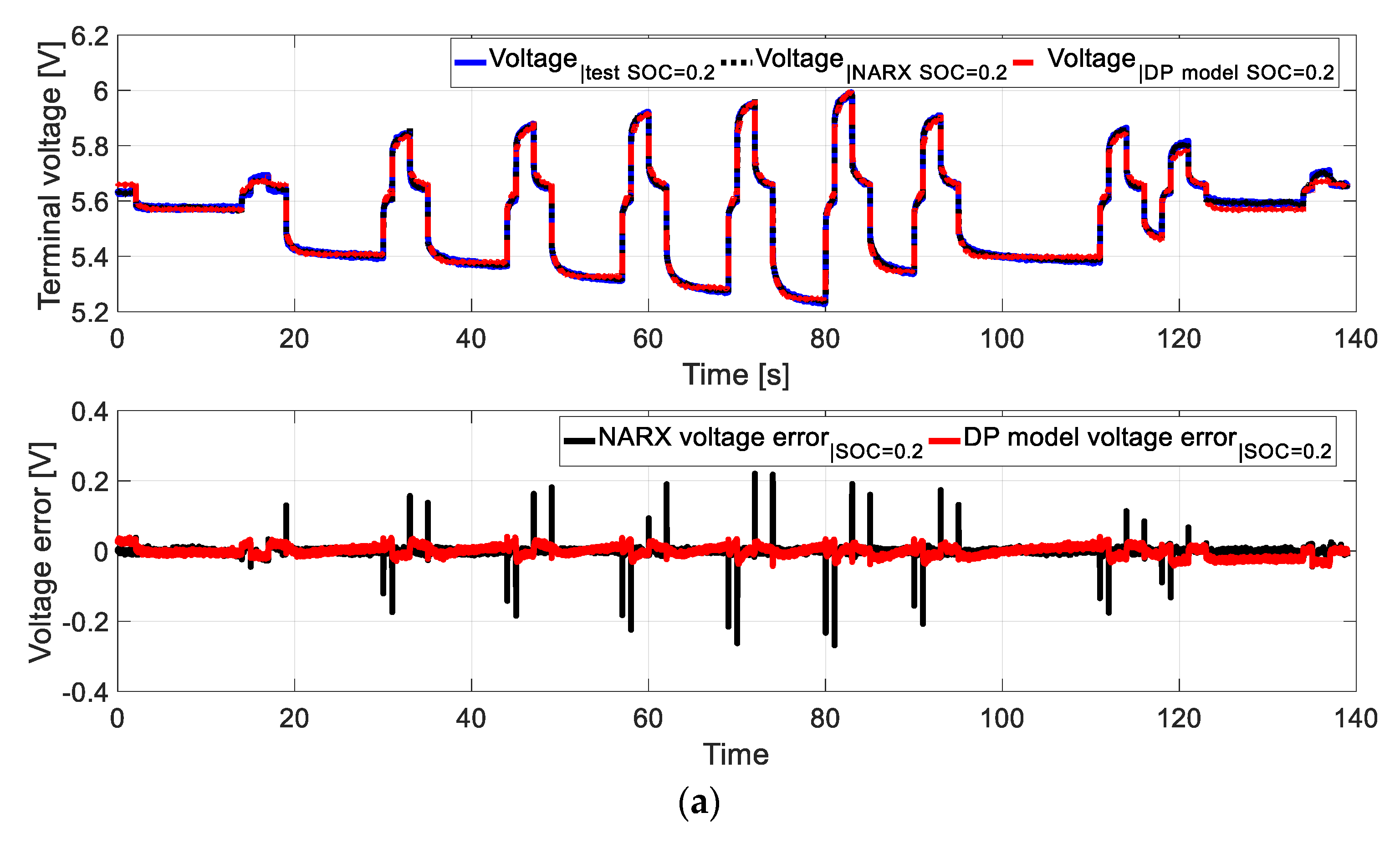
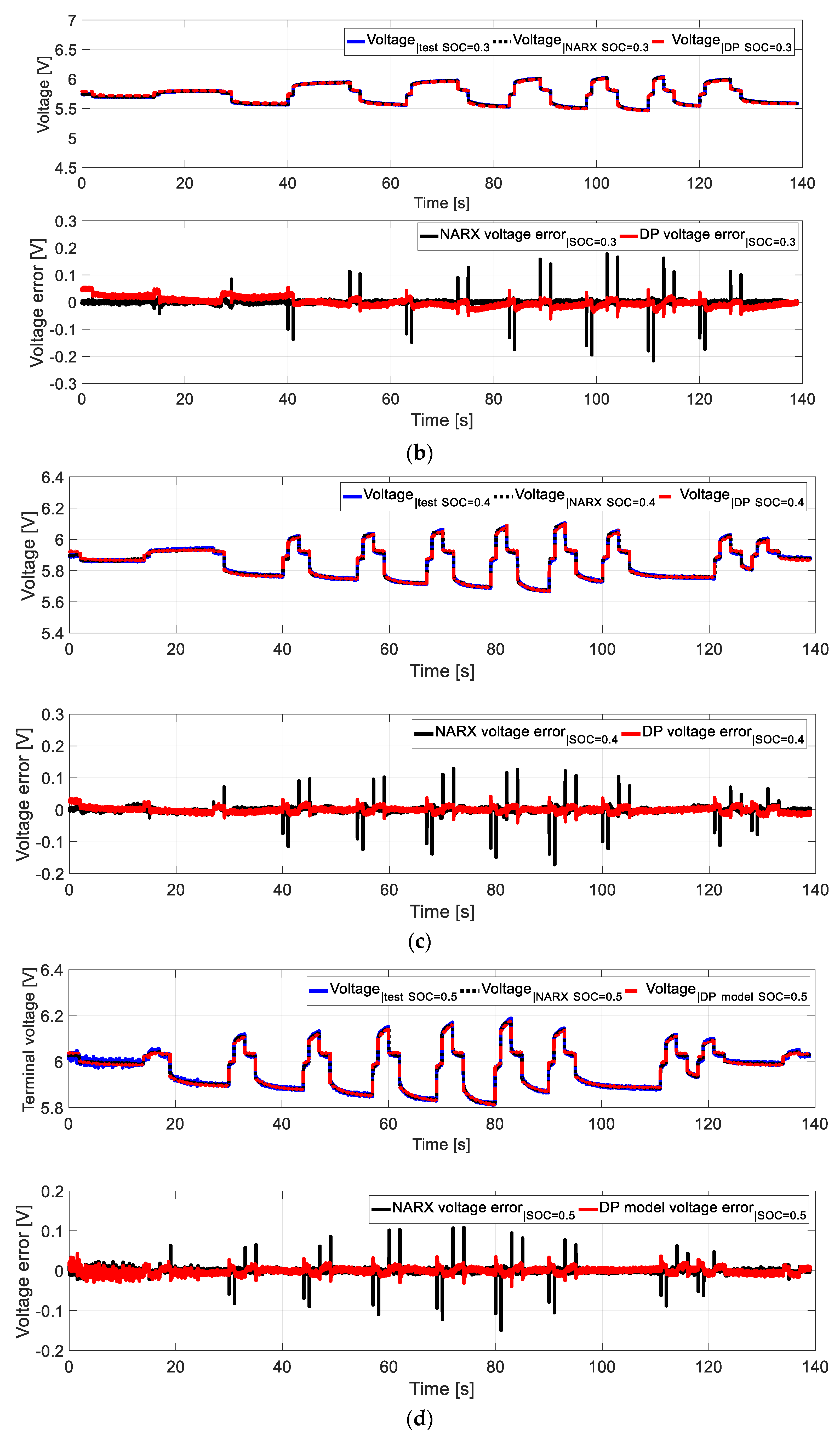
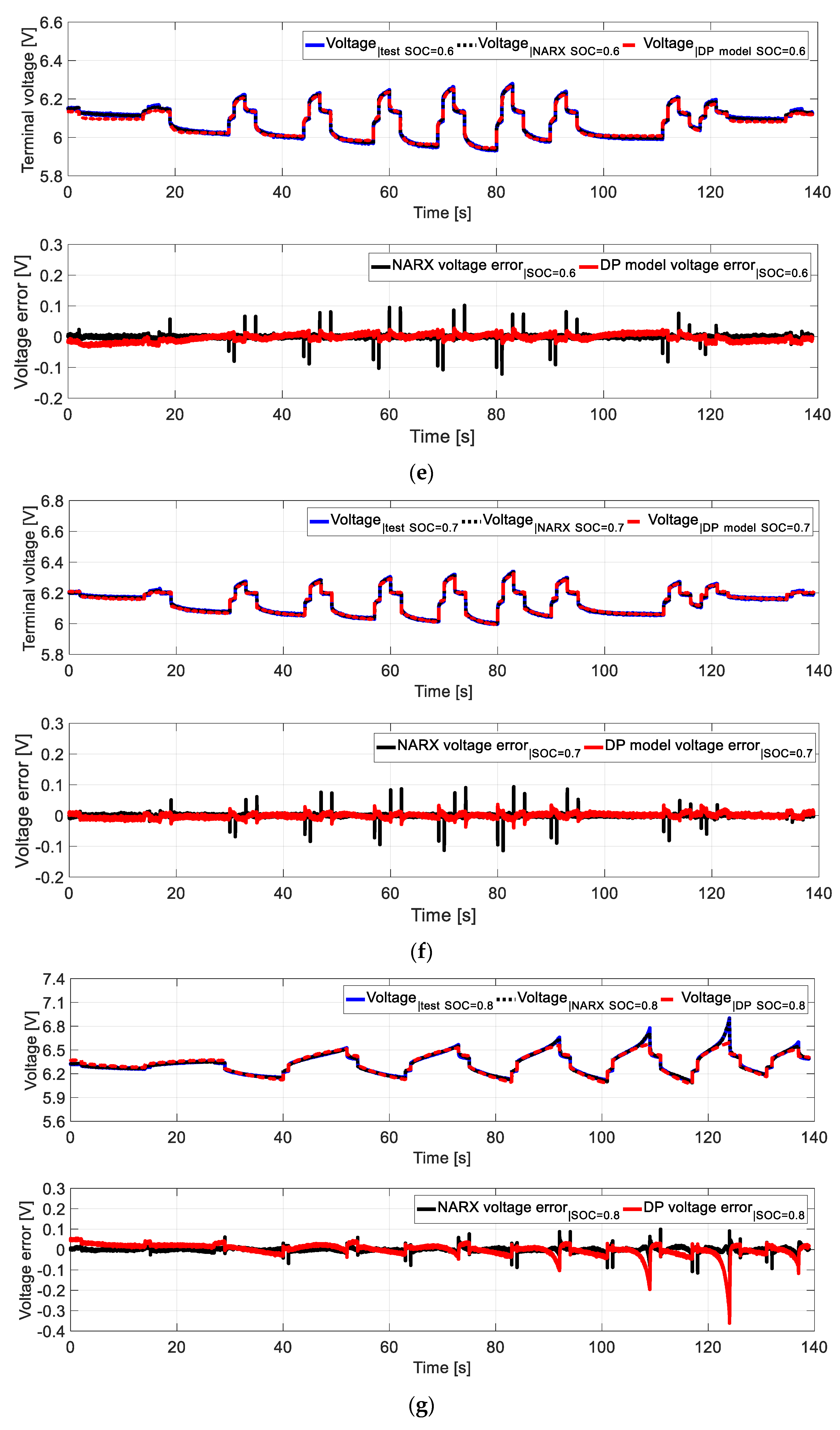
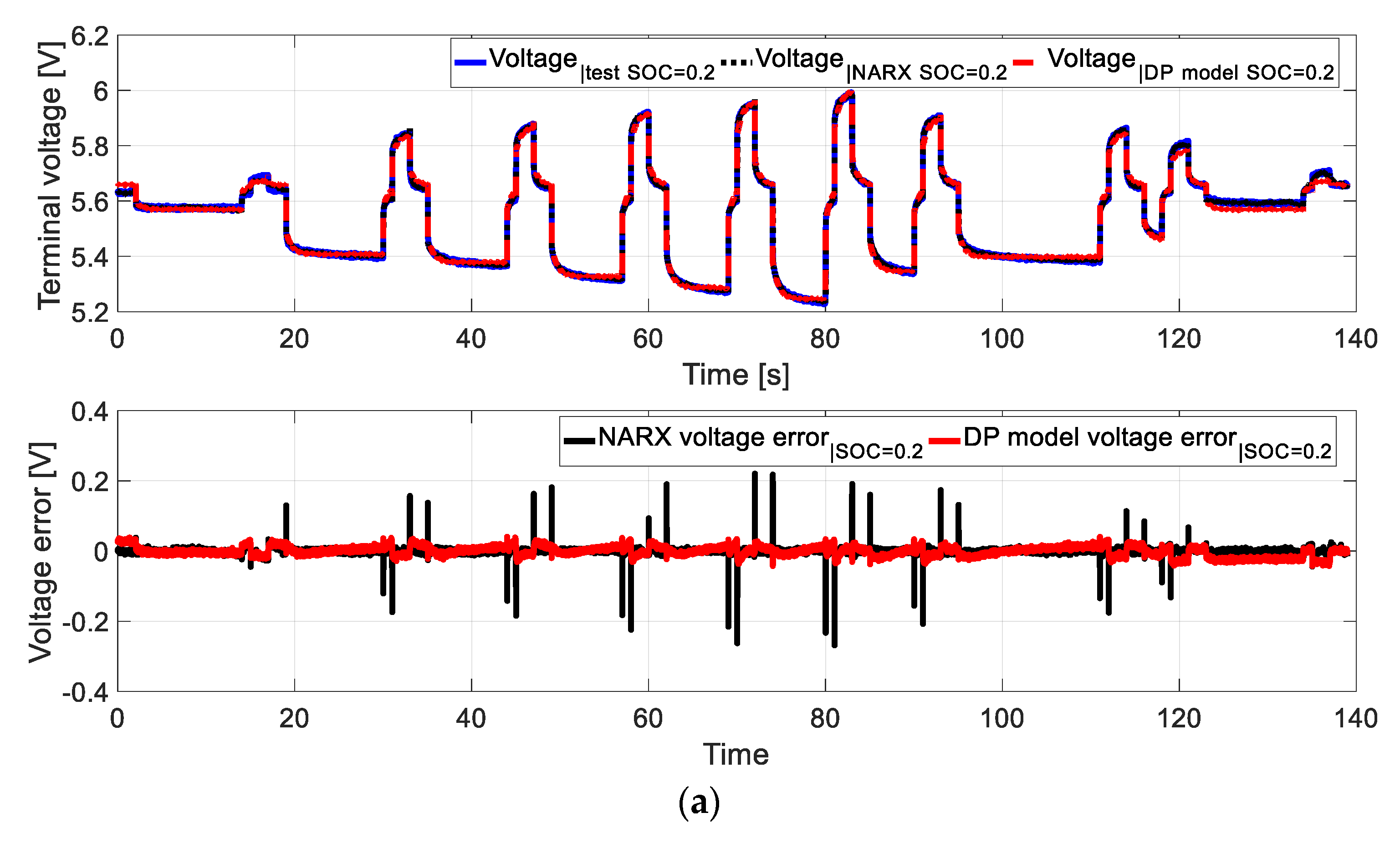
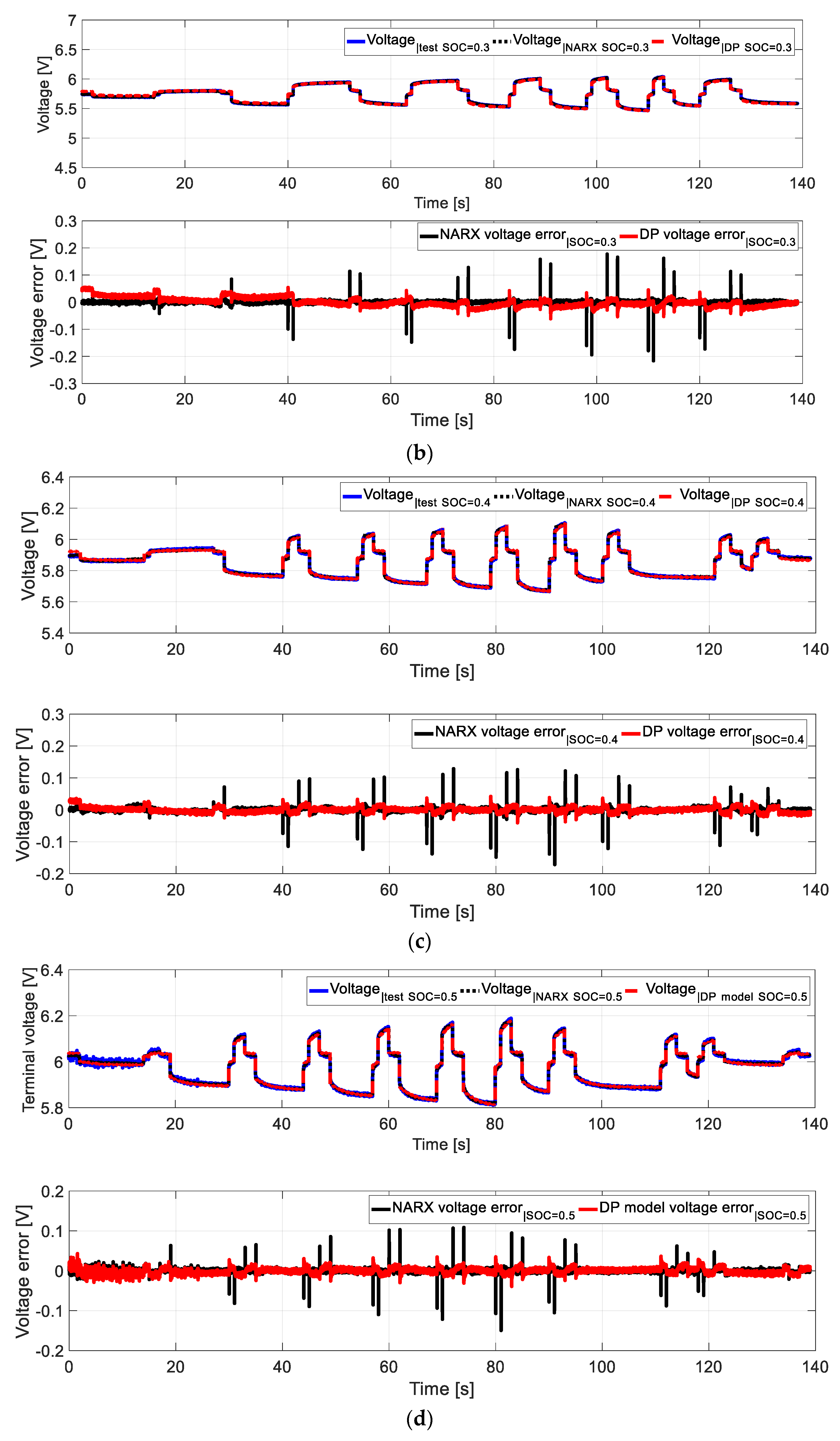
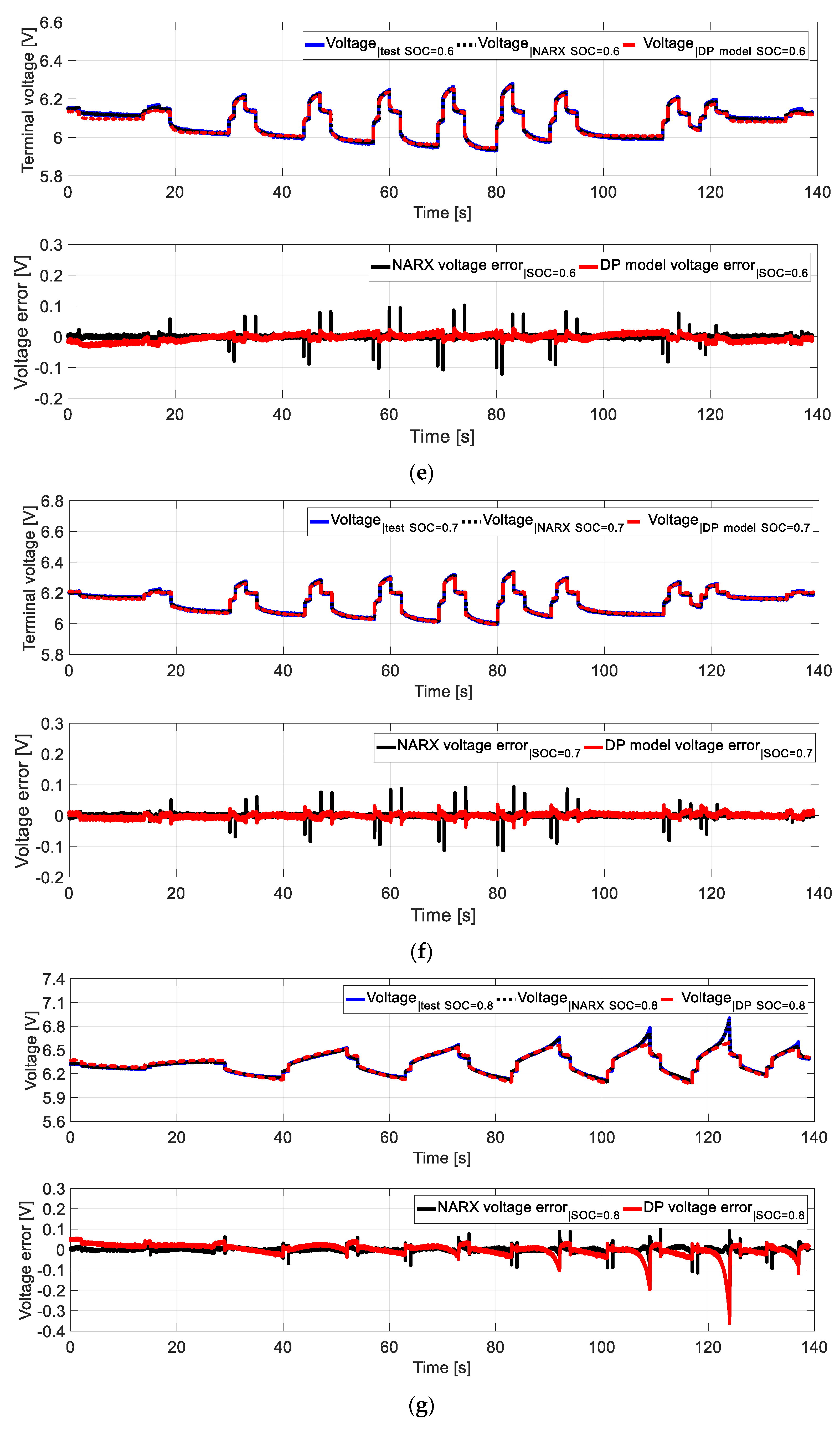
4. Validation of Results Acquired from Measurements, DP and NARX Models
5. Conclusions
- Increase in the accuracy of identified parameters with the use of models with additional RC loops (three and four RC loop pairs), which will greatly increase accuracy particularly for SOC >0.8 and SOC <0.2. Another approach, instead of increasing the number of RC loop pairs and also a compromise between the number of estimated parameters and the accuracy, is to use constant phase elements (CPE) [135,136,137,138].
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Acronyms | |
| AGM | Absorbent Glass Mat |
| BMS | Battery management system |
| CPE | Constant Phase Elements |
| D | Tapped Delay Line |
| DP | Dual polarization |
| HPPC | Hybrid Pulse Power Characterization |
| MSE | Mean Squared Error [–] |
| NARX | Nonlinear AutoRegressive eXogenous |
| NRMSE | Normalized Root Mean Square Error |
| OCV | Open Circuit Voltage |
| R | ANN–Recurrent Artificial Neural Network |
| SOA | Safe Operating Area |
| SOC | State of Charge |
| SOE | State of Energy |
| SOH | State of Health |
| VRLA | Valve Regulated Lead Acid |
| Greek symbols, subscripts, superscripts and abbreviations | |
| The threshold offset of the n-th neuron in layer m [–] | |
| C1, C2 | Capacitances [F] |
| e | Error |
| EMF | Electromotive force [V] |
| H | Hessian |
| Iload | Loading current from control unit [A] |
| Ich/Idch | Charging/discharging current [A] |
| Ib1, Ib2 | Currents flowing through C1 and C2 [A] |
| J | Jacobian |
| k | Sample number [–] |
| N | The number of data samples [–] |
| n | The number of neurons in nonlinear layer [–] |
| nI, na, nb, nt | Number of delayed steps of inputs [–] |
| nu | Number of delayed steps of output (poles) [–] |
| Number of neural network weights [–] | |
| p | The number of neuron inputs in nonlinear hidden layer [–] |
| R0 | Ohmic resistance [Ω] |
| R1 | Activation polarization resistance [Ω] |
| R2 | Density polarization resistance [Ω] |
| SOC0 | The initial State of Charge for time t = t0 [–] |
| Qbat | Effective capacity [Ah] |
| Qn | Nominal capacity [Ah] |
| Tambient | Ambient temperature [K] |
| Tbody | Body temperature [K] |
| Tterm | Temperature at terminals [K] |
| U1, U2 | The voltage drops occurring in the first and second loop [V] |
| Uch | The charging voltage [V] |
| Udch | The discharging voltage [V] |
| UOCV | Open Circuit Voltage [V] |
| UtermNN | NARX model output at step k [V] |
| The weight vector [–] | |
| The weight of the i-th input to j-th neuron in layer m [–] | |
| Gradient | |
| The gradient vector | |
| ηc | The columbic efficiency [–] |
References
- Ismael, S.M.; Abdel Aleem, S.H.E.; Abdelaziz, A.Y.; Zobaa, A.F. State-of-the-art of hosting capacity in modern power systems with distributed generation. Renew. Energy 2019, 130, 1002–1020. [Google Scholar] [CrossRef]
- Fuentes-Cortés, L.F.; Flores-Tlacuahuac, A. Integration of distributed generation technologies on sustainable buildings. Appl. Energy 2018, 224, 582–601. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Wang, Y.; Zeng, M.; Li, F.; Wang, Y.; Zhang, Y. Energy management of smart micro-grid with response loads and distributed generation considering demand response. J. Clean. Prod. 2018, 197, 1069–1083. [Google Scholar] [CrossRef]
- Nguyen, S.; Peng, W.; Sokolowski, P.; Alahakoon, D.; Yu, X. Optimizing rooftop photovoltaic distributed generation with battery storage for peer-to-peer energy trading. Appl. Energy 2018, 228, 2567–2580. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, H.; Xu, Y.; Li, W.; Huang, Y. Distributed generation with energy storage systems: A case study. Appl. Energy 2017, 204, 1251–1263. [Google Scholar] [CrossRef]
- Del Granado, P.C.; Pang, Z.; Wallace, S.W. Synergy of smart grids and hybrid distributed generation on the value of energy storage. Appl. Energy 2016, 170, 476–488. [Google Scholar] [CrossRef] [Green Version]
- Mills, G.; MacGill, I. Assessing Electric Vehicle storage, flexibility, and Distributed Energy Resource potential. J. Energy Storage 2018, 17, 357–366. [Google Scholar] [CrossRef]
- Szabłowski, Ł.; Milewski, J.; Badyda, K.; Kupecki, J. ANN-supported control strategy for a solid oxide fuel cell working on demand for a public utility building. Int. J. Hydrogen Energy 2018, 43, 3555–3565. [Google Scholar] [CrossRef]
- Milewski, J.; Szabłowski, Ł.; Kuta, J. Control strategy for an Internal Combustion engine fuelled by Natural Gas operating in Distributed Generation. Energy Procedia 2012, 14, 1478–1483. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; Li, B.; Ji, J.; Zhao, K.; Hu, C. A review of power management strategies and component sizing methods for hybrid vehicles. Renew. Sustain. Energy Rev. 2018, 96, 132–144. [Google Scholar] [CrossRef]
- Hiermann, G.; Hartl, R.F.; Puchinger, J.; Vidal, T. Routing a mix of conventional, plug-in hybrid, and electric vehicles. Eur. J. Oper. Res. 2019, 272, 235–248. [Google Scholar] [CrossRef] [Green Version]
- Iwata, K.; Matsumoto, S. Use of hybrid vehicles in Japan: An analysis of used car market data. Transp. Res. Part D 2016, 46, 200–206. [Google Scholar] [CrossRef]
- Chen, S.Y.; Wu, C.H.; Hung, Y.H.; Chung, C.T. Optimal strategies of energy management integrated with transmission control for a hybrid electric vehicle using dynamic particle swarm optimization. Energy 2018, 160, 154–170. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel battery/photovoltaic hybrid power source for plug-in hybrid electric vehicles. Sol. Energy 2018, 159, 243–250. [Google Scholar] [CrossRef]
- Breetz, H.L.; Salon, D. Do electric vehicles need subsidies? Ownership costs for conventional, hybrid, and electric vehicles in 14 U.S. cities. Energy Policy 2018, 120, 238–249. [Google Scholar] [CrossRef]
- Song, Z.; Zhang, X.; Li, J.; Hofmann, H.; Ouyang, M.; Du, J. Component sizing optimization of plug-in hybrid electric vehicles with the hybrid energy storage system. Energy 2018, 144, 393–403. [Google Scholar] [CrossRef]
- de Souza, L.L.P.; Lora, E.E.S.; Palacio, J.C.E.; Rocha, M.H.; Renó, M.L.G.; Venturini, O.J. Comparative environmental life cycle assessment of conventional vehicles with different fuel options, plug-in hybrid and electric vehicles for a sustainable transportation system in Brazil. J. Clean. Prod. 2018, 203, 444–468. [Google Scholar] [CrossRef]
- Chmielewski, A.; Szulim, P.; Gregorczyk, M.; Gumiński, R.; Mydłowski, T.; Mączak, J. Model of an electric vehicle powered by a PV cell—A case study. In Proceedings of the 22nd International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 28–31 August 2017; pp. 1009–1014. [Google Scholar]
- Rosenow, J.; Cowart, R.; Bayer, E.; Fabbri, M. Assessing the European Union’s energy efficiency policy: Will the winter package deliver on ‘Efficiency First’? Energy Res. Soc. Sci. 2017, 26, 72–79. [Google Scholar] [CrossRef]
- Haas, T. Struggles in European Union energy politics: A gramscian perspective on power in energy transitions. Energy Res. Soc. Sci. 2019, 48, 66–74. [Google Scholar] [CrossRef]
- Irsyad, M.I.; Halog, A.; Nepal, R. Renewable energy projections for climate change mitigation: An analysis of uncertainty and errors. Renew. Energy 2019, 130, 536–546. [Google Scholar] [CrossRef]
- Capros, P.; Kannavou, M.; Evangelopoulou, S.; Petropoulos, A.; Siskos, P.; Tasios, N.; Zazias, G.; DeVita, A. Outlook of the EU energy system up to 2050: The case of scenarios prepared for European Commission’s “clean energy for all Europeans”package using the PRIMES model. Energy Strategy Rev. 2018, 22, 255–263. [Google Scholar] [CrossRef]
- VRLA Battery Distributor—AKBA Website. Available online: http://akba.pl/EN/ (accessed on 15 October 2018).
- VRLA Battery Producer—MW Power Website. Available online: https://mwpower.pl/batteries/en/agm/ (accessed on 15 October 2018).
- VRLA Battery Distributor—MPL Energy Sp. Z.O.O Website. Available online: https://mplenergy.pl/en/about–us/ (accessed on 15 October 2018).
- VRLA Battery Distributor—Battery Trade Office BTO Website. Available online: https://www.bto.pl/en/kat/59/120v (accessed on 15 October 2018).
- Piórkowski, P.; Chmielewski, A.; Bogdziński, K.; Możaryn, J.; Mydłowski, T. Research on Ultracapacitors in Hybrid systems: Case Study. Energies 2018, 11, 2551. [Google Scholar] [CrossRef]
- Stienecker, A.W.; Stuart, T.; Ashtiani, C. A Combined ultracapacitor-lead acid battery energy storage system for mild hybrid electric vehicles. In Proceedings of the 2005 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 7–9 September 2005; pp. 350–355. [Google Scholar]
- Chmielewski, A.; Bogdziński, K.; Gumiński, R.; Szulim, P.; Piórkowski, P.; Możaryn, J.; Mączak, J. Operational Research of VRLA Battery. In Automation 2018: Advances in Intelligent Systems and Computing; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer: Cham, Switzerland, 2018; Volume 743, pp. 783–791. [Google Scholar]
- Możaryn, J.; Chmielewski, A. Selected parameters prediction of energy storage system using recurrent neural networks. In Proceedings of the 10th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes—SAFEPROCESS, Warsaw, Poland, 29–31 August 2018. [Google Scholar]
- Jankowska, E.; Kopciuch, K.; Błażejczyk, M.; Majchrzycki, W.; Piórkowski, P.; Chmielewski, A.; Bogdziński, K. Hybrid energy storage based on ultracapacitor and lead acid battery: Case study. In Automation 2018: Advances in Intelligent Systems and Computing; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer: Cham, Switzerland, 2018; Volume 743, pp. 339–349. [Google Scholar]
- He, Q.; Zha, Y.; Sun, Q.; Pan, Z.; Liu, T. Capacity Fast Prediction and Residual Useful Life Estimation of Valve Regulated Lead Acid Battery. Math. Probl. Eng. 2017, 2017, 7835049. [Google Scholar] [CrossRef]
- Pascoe, P.E.; Anbuky, A.H. A VRLA battery simulation model. Energy Convers. Manag. 2004, 45, 1015–1041. [Google Scholar] [CrossRef]
- Kujundzic, G.; Ileš, Š.; Matuško, J.; Vašak, M. Optimal charging of valve-regulated lead-acid batteries based on model predictive control. Appl. Energy 2017, 187, 189–202. [Google Scholar] [CrossRef]
- Fairweather, A.J.; Foster, M.P.; Stone, D.A. Modelling of VRLA batteries over operational temperature range using Pseudo Random Binary Sequences. J. Power Sources 2012, 207, 56–59. [Google Scholar] [CrossRef]
- Kularatna, N. Dynamics, models, and management of rechargeable batteries. In Energy Storage Devices for Electronic Systems, Rechargeable Batteries and Supercapacitors; Hillcrest: Hamilton, New Zealand, 2015; pp. 63–135. [Google Scholar]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of Current Development in Electrical Energy Storage Technologies and the Application Potential in Power System Operation. Appl. Energy 2015, 137, 511–536. [Google Scholar] [CrossRef]
- Michalczuk, M.; Grzesiak, L.M.; Ufnalski, B. Experimental parameter identification of battery-ultracapacitor energy storage system. In Proceedings of the 2015 IEEE 24th International Symposium on Industrial Electronics (ISIE), Buzios, Brazil, 3–5 June 2015; pp. 1260–1265. [Google Scholar]
- Mandla, E.; Mandic, G.; Nasiri, A. Development of an electrical model for lithium-ion ultracapacitors. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 395–404. [Google Scholar] [CrossRef]
- Chmielewski, A.; Piórkowski, P.; Bogdziński, K.; Szulim, P.; Gumiński, R. Test bench and model research of hybrid energy storage. J. Power Technol. 2017, 97, 406–415. [Google Scholar]
- Zhang, L.; Hu, X.; Wang, Z.; Sun, F.; Dorrell, D.G. A review of supercapacitor modeling, estimation, and applications: A control/management perspective. Renew. Sustain. Energy Rev. 2018, 81, 1868–1878. [Google Scholar] [CrossRef]
- Ferg, E.; Rossouw, C.; Loyson, P. The testing of batteries linked to supercapacitors with electrochemical impedance spectroscopy: A comparison between Li-ion and valve regulated lead acid batteries. J. Power Sources 2013, 226, 299–305. [Google Scholar] [CrossRef]
- Szumanowski, A.; Piórkowski, P.; Chang, Y. Batteries and ultracapacitors set in hybrid propulsion system. In Proceedings of the 2007 International Conference on Power Engineering, Energy and Electrical Drives, Setubal, Portugal, 12–14 April 2007. [Google Scholar]
- Pop, V.; Bergveld, H.J.; Danilov, D.; Regtien, P.P.L.; Notten, P.H.L. Battery Management Systems: Accurate State-of-Charge Indication for Battery-Powered Applications; Springer Netherlands Science + Business Media B.V: Eindhoven, The Netherlands, 2008. [Google Scholar]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of Charge and State of Health Estimation for Lithium Batteries Using Recurrent Neural Networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- Soteris, A.; Mellit, A. Artificial Intelligence Techniques for Photovoltaic Applications: A Review. Prog. Energy Combust. Sci. 2008, 34, 574–632. [Google Scholar]
- Micallef, A.; Apap, M.; Spiteri-Staines, C.; Guerrero, J. Mitigation of Harmonics in Grid-Connected and Islanded Microgrids Via Virtual Admittances and Impedances. IEEE Trans. Smart Grid 2015, 8, 651–661. [Google Scholar] [CrossRef]
- Chia, Y.; Lee, L.; Shafiabady, N.; Isa, D. A Load Predictive Energy Management System for Supercapacitor-Battery Hybrid Energy Storage System in Solar Application Using the Support Vector Machine. Appl. Energy 2015, 137, 588–602. [Google Scholar] [CrossRef]
- Koohi-Kamali, S.; Rahim, N.; Mokhlis, H.; Tyagi, V. Photovoltaic Electricity Generator Dynamic Modeling Methods for Smart Grid Applications: A Review. Renew. Sustain. Energy Rev. 2016, 57, 131–172. [Google Scholar] [CrossRef]
- Kopczyński, A.; Piórkowski, P.; Roszczyk, P. Parameters selection of extended-range electric vehicle powered from supercapacitor pack based on laboratory and simulation tests. IOP Conf. Ser. Mater. Sci. Eng. 2018, 421, 022016. [Google Scholar] [CrossRef]
- Zhu, W.H.; Tatarchuk, B.J. Characterization of asymmetric ultracapacitors as hybrid pulse power devices for efficient energy storage and power delivery applications. Appl. Energy 2016, 169, 460–468. [Google Scholar] [CrossRef]
- Castano-Solis, S.; Serrano-Jimenez, D.; Fraile-Ardanuy, J.; Sanz-Feito, J. Hybrid characterization procedure of Li-ion battery packs for wide frequency range dynamics applications. Electr. Power Syst. Res. 2019, 166, 9–17. [Google Scholar] [CrossRef]
- Panchal, S.; Mcgrory, J.; Kong, J.; Fraser, R.; Fowler, M.; Dincer, I.; Agelin-Chaab, M. Cycling degradation testing and analysis of a LiFePO4 battery at actual conditions. Int. J. Energy Res. 2017, 41, 2565–2575. [Google Scholar] [CrossRef]
- Panchal, S.; Mathew, M.; Fraser, R.; Fowler, M. Electrochemical thermal modeling and experimental measurements of 18650 cylindrical lithium-ion battery during discharge cycle for an EV. Appl. Therm. Eng. 2018, 135, 123–132. [Google Scholar] [CrossRef]
- Chmielewski, A.; Możaryn, J.; Bogdziński, K.; Piórkowski, P.; Mydłowski, T.; Gumiński, R.; Mączak, J. Selected properties of the hybrid micro-installation model based on electrochemical battery and PV module. Int. J. Struc. Stab. Dyn. 2018, in press. [Google Scholar]
- Szumanowski, A.; Chang, Y. Battery Management System Based on Battery Nonlinear Dynamics Modeling. IEEE Trans. Veh. Technol. 2008, 57, 1425–1432. [Google Scholar] [CrossRef]
- Grzesiak, L.; Ufnalski, B.; Kaszewski, A.; Gąbka, G.; Roszczyk, P. Power management in series hybrid drive. Przegląd Elektrotechniczny 2012, 88, 304–308. [Google Scholar]
- Farmann, A.; Sauer, D. A comprehensive review of on-board State-of-Available-Power prediction techniques for lithium-ion batteries in electric vehicles. J. Power Sources 2016, 329, 123–137. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Ramadan, H.S.; Becherif, M.; Claude, F. Extended Kalman filter for accurate state of charge estimation of lithium-based batteries: A comparative analysis. Int. J. Hydrogen Energy 2017, 42, 29033–29046. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J.X. State-of-Charge estimation of the lithium-ion, battery using an adaptive extended Kalman filter based on an improved Thevenin model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Mu, H.; Xiong, R.; Zheng, H.; Chang, Y.; Chen, Z. A novel fractional order model based state-of-charge estimation method for lithium-ion battery. Appl. Energy 2017, 207, 384–393. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of Lithium-Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef] [Green Version]
- Ting, T.O.; Man, K.L.; Lim, E.G.; Leach, M. Tuning of Kalman Filter Parameters via Genetic Algorithm for State-of-Charge Estimation in Battery Management System. Math. Probl. Eng. 2014, 2014, 176052. [Google Scholar] [CrossRef] [PubMed]
- Xavier, M.A.; Trimboli, M.S. Lithium-ion battery cell-level control using constrained model predictive control and equivalent circuit models. J. Power Sources 2015, 285, 374–384. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Gao, W.; Ouyang, M.; Lu, L.; Zhoua, L.; Han, X. State-of-charge inconsistency estimation of lithium-ion battery pack using mean-difference model and extended Kalman filter. J. Power Sources 2018, 383, 50–58. [Google Scholar] [CrossRef]
- Afshar, S.; Morris, K.; Khajepour, A. State of Charge estimation via extended Kalman filter designed for electrochemical equations. IFAC-PapersOnLine 2017, 50, 2152–2157. [Google Scholar] [CrossRef]
- Chmielewski, A.; Piórkowski, P.; Gumiński, R.; Bogdziński, K.; Możaryn, J. Model-based Research on Ultracapacitors. In Automation 2018: Advances in Intelligent Systems and Computing; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer: Cham, Switzerland, 2018; Volume 743, pp. 254–264. [Google Scholar]
- Gu, W.; Wang, C. Thermal-Electrochemical Modeling of Battery Systems. J. Electrochem. Soc. 2000, 147, 2910–2922. [Google Scholar] [CrossRef]
- Saito, Y.; Shikano, M.; Kobayashi, H. Heat Generation Behavior During Charging and Discharging of Lithium-Ion Batteries After Long-Time Storage. J. Power Sources 2013, 244, 294–299. [Google Scholar] [CrossRef]
- Li, J.; Cheng, Y.; Jia, M.; Tang, Y.; Lin, Y.; Zhian, Z.; Liu, Y. An Electrochemical-Thermal Model Based on Dynamic Responses for Lithium-Iron-Phosphate Battery. J. Power Sources 2014, 225, 130–143. [Google Scholar] [CrossRef]
- Lai, Y.; Du, S.; Ai, L.; Cheng, Y.; Tang, Y.; Jia, M. Insight into Heat Generation of Lithium-Ion Batteries Based on the Electrochemical-Thermal Model at High Discharge Rates. Int. J. Hydrogen Energy 2015, 40, 13039–13049. [Google Scholar] [CrossRef]
- Li, J.; Wang, L.; Lyu, C.; Wang, H.; Liu, X. New Method for Parameter Estimation of an Electrochemical-Thermal Coupling Model for Li-Co-O2 Battery. J. Power Sources 2016, 307, 220–230. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.; Propp, K.; Longo, S.; Wild, M. A Review on Electric Vehicle Battery Modelling: From Lithium-Ion Toward Lithium-Sulphur. Renew. Sustain. Energy Rev. 2016, 56, 1008–1021. [Google Scholar] [CrossRef]
- Collazos, A.; Maréchal, F.; Gähler, C. Predictive Optimal Management Method for the Control of Polygeneration Systems. Comput. Chem. Eng. 2009, 33, 1584–1592. [Google Scholar] [CrossRef]
- Yao, L.W.; Aziz, J.A.; Ramli, N. Detail analysis of RC parallel network-based model for high capacity lithium ferro phosphates battery. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar]
- Li, S.; Cheng, X. A comparative study on RC models of lithium-ion battery. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–4. [Google Scholar]
- Piao, C.; Yang, X. An improved model based on artificial neural networks and Thevenin model for nickel metal hydride power battery. In Proceedings of the International Conference on Optics, Photonics and Energy Engineering (OPEE), Wuhan, China, 10–11 May 2010; pp. 115–118. [Google Scholar]
- Putra, W.S.; Dewangga, B.R.; Cahyadi, A.; Wahyunggoro, O. Current Estimation Using Thevenin Battery Model. In Proceedings of the Joint International Conference on Electric Vehicular Technology and Industrial, Mechanical, Electrical and Chemical Engineering (ICEVT & IMECE), Surakarta, Indonesia, 4–5 November 2015; pp. 5–9. [Google Scholar]
- Gao, W.; Jiang, M. Research on PNGV Model Parameter Identification of LiFePO4 Li-ion Battery Based on FMRLS. In Proceedings of the 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011; pp. 2294–2297. [Google Scholar]
- Han, Y.; Wang, X. WPT Charging System for Lithium Battery Based on PNGV Model. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–5. [Google Scholar]
- Liu, X.; Li, W.; Zhou, A. PNGV Equivalent Circuit Model and SOC Estimation Algorithm for Lithium Battery Pack Adopted in AGV Vehicle. IEEE Access 2018, 6, 23639–23647. [Google Scholar] [CrossRef]
- Bottinger, M.; Paulitschke, M.; Bocklisch, T. Systematic Experimental Pulse Test Investigation for Parameter Identification of an Equivalent Circuit Based Lithium-Ion Battery Model. Energy Procedia 2017, 135, 337–346. [Google Scholar] [CrossRef]
- Cheng, P.; Zhou, Y.; Song, Z.; Ou, Y. Modeling and SOC Estimation of LiFePO4 Battery. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Qingdao, China, 3–7 December 2016; pp. 2140–2144. [Google Scholar]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Inline State of Health Estimation of Lithium-Ion Batteries Using State of Charge Calculation. J. Power Sources 2015, 299, 246–254. [Google Scholar] [CrossRef]
- Zhang, C.; Allafi, W.; Dinh, Q.; Ascencio, P.; Marco, J. Online Estimation of Battery Equivalent Circuit Model Parameters and State of Charge Using Decoupled Least Squares Technique. Energy 2018, 142, 678–688. [Google Scholar] [CrossRef]
- Ke, M.Y.; Chiu, Y.H.; Wu, C.Y. Battery Modelling and SOC Estimation of a LiFePO4 Battery. In Proceedings of the 2016 International Symposium on Computer, Consumer and Control, Xi’an, China, 4–6 July 2016; pp. 208–211. [Google Scholar]
- Pattipati, B.; Balasingam, B.; Avvari, G.V.; Pattipati, K.R.; Bar-Shalom, Y. Open circuit voltage characterization of lithium-ion batteries. J. Power Sources 2014, 269, 317–333. [Google Scholar] [CrossRef]
- Jackey, R.; Saginaw, M.; Sanghvi, P.; Gazzarri, J.; Huria, T.; Ceraolo, M. Battery Model Parameter Estimation Using a Layered Technique: An Example Using a Lithium Iron Phosphate Cell; SAE Technical Paper 2013-01-1547; Detroit: Michigan, MI, USA, 2013; pp. 1–14. [Google Scholar]
- Wang, A.; Jin, X.; Li, Y.; Li, N. LiFePO4 Battery Modeling and SOC Estimation Algorithm. In Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 7574–7578. [Google Scholar]
- Lai, X.; Zheng, Y.; Sun, T. A Comparative Study of Different Equivalent Circuit Models for Estimating State-of-Charge of Lithium-Ion Batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Liu, G.; Lu, L.; Fu, H.; Hua, J.; Li, J.; Ouyang, M.; Wang, Y.; Xue, S.; Chen, P. A comparative study of equivalent circuit models and enhanced equivalent circuit models of lithium-ion batteries with different model structures. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Chen, Z.; Xia, B.; Mi, C.C.; Xiong, R. Loss Minimization-Based Charging Strategy for Lithium-ion Battery. IEEE Trans. Ind. Appl. 2015, 51, 4121–4129. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.; Li, Z.; Yu, Q.; Mu, H. An electrochemical model based degradation state identification method of Lithium-ion battery for all-climate electric vehicles application. Appl. Energy 2018, 219, 264–275. [Google Scholar] [CrossRef]
- Yang, D.; Wang, Y.; Pan, R.; Chen, R.; Chen, Z. A neural network based state-of-health estimation of lithium-ion battery in electric vehicles. Energy Procedia 2017, 105, 2059–2064. [Google Scholar] [CrossRef]
- Tong, S.; Lacap, J.H.; Park, J.W. Battery State of Charge Estimation Using a Load-Classifying Neural Network. J. Energy Storage 2016, 7, 236–243. [Google Scholar] [CrossRef]
- Gallien, T.; Brasseur, G. State of Charge Estimation of a LiFePO4 Battery: A Dual Estimation Approach Incorporating Open Circuit Voltage Hysteresis. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference, Taipei, Taiwan, 23–26 May 2016; pp. 1–6. [Google Scholar]
- Feng, T.; Yang, L.; Zhao, X.; Zhang, H.; Qiang, J. Online identification of lithium-ion battery parameters based on an improved equivalent-circuit model and its implementation on battery state-of-power prediction. J. Power Sources 2015, 281, 192–203. [Google Scholar] [CrossRef]
- Li, Z.; Xiong, R.; He, H. An improved battery on-line parameter identification and state-of-charge determining method. Energy Procedia 2016, 103, 381–386. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Wang, L.Y. Open circuit voltage and state of charge online estimation for lithium ion batteries. Energy Procedia 2017, 142, 1902–1907. [Google Scholar] [CrossRef]
- Nikolian, A.; Firouz, Y.; Gopalakrishnan, R.; Timmermans, J.M.; Omar, N.; Bossche, P.; Mierlo, J. Lithium Ion Batteries-Development of Advanced Electrical Equivalent Circuit Models for Nickel Manganese Cobalt Lithium-Ion. Energies 2016, 9, 360. [Google Scholar] [CrossRef]
- Xing, Y.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Zhou, D.; Yin, H.; Fu, P.; Song, X.; Lu, W.; Yuan, L.; Fu, Z. Prognostics for State of Health of Lithium-Ion Batteries Based on Gaussian Process Regression. Math. Probl. Eng. 2018, 2018, 8358025. [Google Scholar] [CrossRef]
- Kim, J.; Cho, B.H. State-of-Charge Estimation and State-of-Health Prediction of a Li-Ion Degraded Battery Based on an EKF Combined with a Per-Unit System. IEEE Trans. Veh. Technol. 2011, 60, 4249–4260. [Google Scholar] [CrossRef]
- Jiang, J.; Liang, Y.; Ju, Q.; Zhang, L.; Zhang, W.; Zhang, C. An Equivalent Circuit Model for Lithium-Sulfur Batteries. Energy Procedia 2017, 105, 3533–3538. [Google Scholar] [CrossRef]
- Wang, Q.K.; He, Y.J.; Shen, J.N.; Ma, Z.F.; Zhong, G.B. A unified modeling framework for lithium-ion batteries: An artificial neural network based thermal coupled equivalent circuit model approach. Energy 2017, 138, 118–132. [Google Scholar] [CrossRef]
- Zhang, J.; Wei, Y.; Qi, H. State of charge estimation of LiFePO4 batteries based on online parameter identification. Appl. Math. Model. 2016, 40, 6040–6050. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Chen, Z.; Liu, X. Model based insulation fault diagnosis for lithium-ion battery pack in electric vehicles. Measurement 2019, 131, 443–451. [Google Scholar] [CrossRef]
- Farmanna, A.; Sauer, D.U. Comparative study of reduced order equivalent circuit models for on-board state-of-available-power prediction of lithium-ion batteries in electric vehicles. Appl. Energy 2018, 225, 1102–1122. [Google Scholar] [CrossRef]
- Chmielewski, A.; Możaryn, J.; Piórkowski, P.; Gumiński, R.; Bogdziński, K. Modelling of Ultracapacitors using Recurrent Artificial Neural Network. In Advances in Intelligent Systems and Computing, Proceedings of the Automation, Warsaw, Poland, 21–23 March 2018; Springer: Cham, Switzerland, 2018; Volume 743, pp. 713–723. [Google Scholar]
- Chmielewski, A.; Możaryn, J.; Gumiński, R.; Szulim, P.; Bogdziński, K. Experimental Evaluation of Mathematical and Artificial Neural Network Modeling of Energy Storage System. In Dynamical Systems in Applications; Awrejcewicz, J., Ed.; Springer International Publishing: Cham, Switzerland, 2018; Volume 249, pp. 49–62. [Google Scholar]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Ahmed, R.; Emadi, A. Long Short-Term Memory Networks for Accurate State-of-Charge Estimation of Li-ion Batteries. IEEE Trans. Ind. Electron. 2018, 65, 6730–6739. [Google Scholar] [CrossRef]
- Palma, F.D.; Magni, L. A Multi-model Structure for Model Predictive Control. Annu. Rev. Control 2004, 28, 47–52. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Bertrand, N.; Delétage, J.Y.; Vinassa, J.M. Behavior and State-of-Health Monitoring of Li-ion Batteries Using Impedance Spectroscopy and Recurrent Neural Networks. Int. J. Electr. Power Energy Syst. 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Hussein, A.A. Derivation and Comparison of Open-loop and Closed-loop Neural Network Battery State-of-Charge Estimators. In Proceedings of the Energy Procedia: The 7th International Conference on Applied Energy—ICAE 2015, Abu Dhabi, UAE, 28–31 March 2015; Volume 75, pp. 1856–1861. [Google Scholar]
- Hu, X.S.; Sun, F.C.; Li, S.B.; Yang, Y.L. NARX Modelling of a Lithium Iron Phosphate Battery Used for Electrified Vehicle Simulation. Int. J. Model. Identif. Control 2013, 20, 181–189. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, X.; Zhang, C.; Chen, Z. A Method for State of Energy Estimation of Lithium-ion Batteries Based on Neural Network Model. Energy 2015, 90, 879–888. [Google Scholar] [CrossRef]
- Dang, X.; Yan, L.; Xu, K.; Wu, X.; Jiang, H.; Sun, H. Open-Circuit Voltage-Based State of Charge Estimation of Lithium-ion Battery Using Dual Neural Network Fusion Battery Model. Electrochim. Acta 2016, 188, 356–366. [Google Scholar] [CrossRef]
- Liu, K.B.; Liu, C.Y.; Liu, Y.H.; Chien, Y.C.; Wang, B.S.; Wong, Y.S. Analysis and Controller Design of a Universal Bidirectional DC–DC Converter. Energies 2016, 9, 501. [Google Scholar] [CrossRef]
- Box, G.E.P.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control; Series in Probability and Statistics; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Chen, S.; Billings, S.A.; Cowan, C.F.N.; Grant, P.M. Practical identification of NARMAX models using radial basis functions. Int. J. Control 1990, 52, 1327–1350. [Google Scholar] [CrossRef] [Green Version]
- Sjoberg, J.; Zhang, Q.; Ljung, L.; Benveniste, A.; Delyon, B.; Glorennec, P.Y.; Hjalmarsson, H.; Juditsky, A. Nonlinear black-box modeling in system identification: A unified overview. Automatica 1995, 31, 1691–1724. [Google Scholar] [CrossRef]
- Piroddi, L.; Spinelli, W. An identification algorithm for polynomial NARX models based on simulation error minimization. Int. J. Control 2003, 76, 1767–1781. [Google Scholar] [CrossRef]
- Hagan, M.; Demuth, H.; Beale, M.; Orlando, D. Neural Network Design; Martin Hagan: Stillwater, OK, USA, 2014. [Google Scholar]
- Kelley, C.T. Iterative Methods for Optimization. In SIAM Frontiers in Applied Mathematics; North Carolina State University Raleigh: North Carolina, CA, USA, 1999. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning internal representation by error propagation. In Parallel Distributed Processing: Explorations in the Microstructures of Cognition; Rumelhart, David, E., McClelland, J.L., Eds.; MIT Press: Cambridge, MA, USA, 1986; Volume 1, pp. 318–362. [Google Scholar]
- Nguyen, D.; Widrow, B. Improving the Learning Speed of 2–Layer Neural Networks by Choosing Initial Values of the Adaptive Weights. In Proceedings of the International Joint Conference on Neural Networks, San Diego, CA, USA, 17–21 June 1990; Volume 3, pp. 21–26. [Google Scholar]
- Greenwood, P.E.; Nikulin, M.S. A Guide to Chi-Squared Testing; Wiley: New York, NY, USA, 1996; ISBN 0-471-55779-X. [Google Scholar]
- Chen, P.C.Y.; Mills, J.K. Neural network generalization and system sensitivity in feedback control systems. In Proceedings of the 12th IEEE International Symposium on Intelligent Control, Istanbul, Turkey, 16–18 July 1997; pp. 233–238. [Google Scholar]
- Hyndman, R.J.; Koehler, A.B. Another Look at Measures of Forecast Accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef]
- Söderström, T.; Stoica, P. System Identification; Prentice Hall International: Hemel Hempstead, UK, 1994. [Google Scholar]
- Kumar, B.; Khare, N.; Chaturvedi, P.K. FPGA-based design of advanced BMS implementing SoC/SoH estimators. Microelectron. Reliab. 2018, 84, 66–74. [Google Scholar] [CrossRef]
- Deutschena, T.; Gassera, S.; Schallera, M.; Siehr, J. Modeling the self-discharge by voltage decay of a NMC/graphite lithium-ion cell. J. Energy Storage 2018, 19, 113–119. [Google Scholar] [CrossRef]
- Lucua, M.; Martinez-Laserna, E.; Gandiaga, I.; Camblong, H. A critical review on self-adaptive Li-ion battery ageing models. J. Power Sources 2018, 401, 85–101. [Google Scholar] [CrossRef]
- Hu, M.; Li, Y.; Li, S.; Fu, C.; Qin, D.; Li, Z. Lithium-ion battery modeling and parameter identification based on fractional theory. Energy 2018, 165, 153–163. [Google Scholar] [CrossRef]
- Zou, C.; Zhang, L.; Hu, X.; Wang, Z.; Wik, T.; Pecht, M. A review of fractional-order techniques applied to lithium-ion batteries, lead-acid batteries, and supercapacitors. J. Power Sources 2018, 390, 286–296. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; He, H.; Chen, Z. A fractional-order model-based battery external short circuit fault diagnosis approach for all-climate electric vehicles application. J. Clean. Prod. 2018, 187, 950–959. [Google Scholar] [CrossRef]
- Wang, B.; Li, S.E.; Peng, H.; Liu, Z. Fractional-order modeling and parameter identification for lithium-ion batteries. J. Power Sources 2015, 293, 151–161. [Google Scholar] [CrossRef] [Green Version]
- Wawrzynski, P. Robot’s velocity and tilt estimation through computationally efficient fusion of proprioceptive sensors readouts. In Proceedings of the 20th International Conference on Methods and Models in Automation and Robotics, Międzyzdroje, Poland, 24–27 August 2015; pp. 738–743. [Google Scholar]
- Narendra, K.S.; Parthasarathy, K. Learning Automata Approach to Hierarchical Multiobjective Analysis. IEEE Trans. Syst. Man Cybern. 1991, 20, 263–272. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient Name | R0 | R1 | R2 | C1 | C2 | UOCV |
|---|---|---|---|---|---|---|
| A | −42 | −3.9 × 10−5 | 110 | 6 × 108 | −8.9 × 104 | 14 |
| B | 140 | 3.1 × 105 | −320 | −1.4 × 109 | 2.3 × 105 | −27 |
| C | −200 | – | 390 | 1 × 109 | −2.2 × 105 | 17 |
| D | 140 | – | −250 | 3.6 × 108 | 1.1 × 105 | −3.3 |
| E | −57 | – | 92 | 1.8 × 108 | −2.3 × 104 | 5.8 |
| F | 11 | – | −18 | –3.8 × 107 | 2 × 103 | – |
| G | −0.85 | – | 1.4 | 3.5 × 106 | – | – |
| State of Charge (SOC) Data Set Value | NARX Model | DP Model | ||
|---|---|---|---|---|
| MSENARX | NRMSENARX | MSEDP | NRMSEDP | |
| 0.2 | 9.6263 × 10−5 | 0.9453 | 0.2009 × 10−3 | 0.9210 |
| 0.3 | 4.9337 × 10−5 | 0.9546 | 0.2673 × 10−3 | 0.8986 |
| 0.4 | 3.3201 × 10−5 | 0.9427 | 0.0695 × 10−5 | 0.9192 |
| 0.5 | 2.9521 × 10−5 | 0.9371 | 0.0542 × 10−3 | 0.9147 |
| 0.6 | 2.4470 × 10−5 | 0.9376 | 0.1323 × 10−3 | 0.8549 |
| 0.7 | 2.1085 × 10−5 | 0.9407 | 0.0528 × 10−3 | 0.9062 |
| 0.8 | 4.2477 × 10−5 | 0.9489 | 0.9224 × 10−3 | 0.7737 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chmielewski, A.; Możaryn, J.; Piórkowski, P.; Bogdziński, K. Comparison of NARX and Dual Polarization Models for Estimation of the VRLA Battery Charging/Discharging Dynamics in Pulse Cycle. Energies 2018, 11, 3160. https://doi.org/10.3390/en11113160
Chmielewski A, Możaryn J, Piórkowski P, Bogdziński K. Comparison of NARX and Dual Polarization Models for Estimation of the VRLA Battery Charging/Discharging Dynamics in Pulse Cycle. Energies. 2018; 11(11):3160. https://doi.org/10.3390/en11113160
Chicago/Turabian StyleChmielewski, Adrian, Jakub Możaryn, Piotr Piórkowski, and Krzysztof Bogdziński. 2018. "Comparison of NARX and Dual Polarization Models for Estimation of the VRLA Battery Charging/Discharging Dynamics in Pulse Cycle" Energies 11, no. 11: 3160. https://doi.org/10.3390/en11113160
APA StyleChmielewski, A., Możaryn, J., Piórkowski, P., & Bogdziński, K. (2018). Comparison of NARX and Dual Polarization Models for Estimation of the VRLA Battery Charging/Discharging Dynamics in Pulse Cycle. Energies, 11(11), 3160. https://doi.org/10.3390/en11113160