1. Introduction
Since the electric revolution started in the 19th century, the consumption of electrical energy has risen to more than 20 PWh in 2015 [
1] and is expected to rise further [
2]. To fulfill these demands in an environmentally friendly way, energy harvested from ocean waves may play an important role. However, even after decades of research [
3] and a better predictability compared to wind energy [
4], the levelized costs of energy are still too high. Cutting down these costs is a challenge in which this paper wants to contribute by investigating a model-free latching algorithm for wave energy converters (WECs) in arrays.
Many different WEC designs have been proposed [
5] and can generally be divided into three categories based on their interaction with the wave: terminator, attenuators, and absorber. This paper will focus on absorber WECs of the heave buoy type, where a buoy is connected to a generator, here idealized as a perfect linear damper, converting the buoy’s motion into electrical energy. However, the algorithm presented here is suitable also for other converter designs.
Fuels have a high energy density, enabling generators in traditional power plants to produce several MW; most renewable energy resources have a much lower energy density. To generate electrical energy in the scale of traditional power plants, arrays of converters must be installed. Optimal power absorption is obtained when the WEC oscillates in resonance with the incident waves. To force this situation, a wide range of control strategies have been proposed [
6], of which latching, first proposed by Budal and Falnes in 1978 [
7], is one of the best known. To use latching, the damped frequency of the WEC must be higher than the wave frequency, then the phase offset introduced while latching the generator position—mostly done at the extreme position of the movement—can increase the power absorption. In case the frequency of the WEC is much higher than the frequency of the wave, the optimal latching time is 1/4th of the wave length. Implementing latching strategies for irregular, unknown wave climates is a topic of on-going research [
8,
9,
10,
11,
12]. Most latching strategies for irregular waves rely on short term wave forecasting and analytical or numerical modelling of the WEC.
The performance of forecast and model dependent control strategies rely heavily on the quality of the model and its parametrization. The fact that WECs may operate in wave farms, lead to new collaborative approaches. In [
13], WECs that are affected by the wave first pass the measured wave data to the other WECs, so that these have a-priori information about the coming wave. In [
14] a model-free control strategy was presented using a collaborative reinforcement machine learning (CL) of WECs in an array. This paper enhances the idea of CL to find the latching time for an array of WECs in irregular waves.
Machine learning is often used to forecast, for example waves [
15] and wave power generation [
16] or to characterize wave energy resources [
17]. For control purposes, there are a few examples where machine learning approaches have been used: in [
18], an artificial neural network (ANN) was used for reactive control, in [
11] an artificial neural oscillator was used to bring a latching device in resonance with the waves and in [
19] an ANN was controlling the damping of a WEC.
The collaborative learning strategy presented in this paper assumes that several identical latching-controllable WECs are placed in a line parallel to the wave front of unidirectional, irregular waves. At least one of the WECs must be learnable; here a “shallow” artificial neural network (ANN) is used and one WEC does not perform latching but measures the wave. Every time a peak or trough is detected by the measuring WEC a message with the measured mean wave period is sent to all WECs. This information is used by the internal policy of each WEC to decide on a latching time. The absorbed power during a wave and the applied latching time is shared with the other WECs. The learnable WECs adjust their policy based on the best result of all WECs. The focus is to obtain a simple and graspable algorithm which will help to gain an understanding on how the CL obtain its results.
In this paper, it is assumed that the best control strategy for a single WEC is also the best control strategy for each WEC in the array, as the effects between WECs in a row parallel to the wave crest (see also [
20,
21]) may have neglectable small influence on the optimal control parameter.
The new control strategy is evaluated using a numerical, time-domain-based simulation and a motor-based physical scale model operating in the Ocean Basin Wave Tank in the COAST laboratory of the University of Plymouth, UK.
The paper is structured as follow: first, the control strategies used are presented in
Section 2, then the numerical model is described in
Section 3. The set-up of the numerical and physical experiments is the topic of
Section 4, followed by the results in
Section 5 and the discussion in
Section 6. Conclusions of the results and an outlook of potential further work is given in
Section 7.
2. Control Strategies
2.1. Collaborative Learning
CL requires two or more WECs that are arranged horizontally to the incoming wave crest. An example of such a set-up can be found later in this paper in Figure 5. Of these WECs at least one must be learnable (lWEC) and one is working as central WEC, measuring the incident waves.
As presented in this study, the strategy is only capable to handle WECs with similar characteristics and unidirectional waves. For multi-directional sea states, the algorithm would in addition have to calculate the time delay between the WECs and handle the communication between the WECs accordingly.
The central WEC does not have to be controllable. Its purpose is to continuously measure the wave and determine the crests and troughs by analyzing its translator position. Due to latching, the other WECs may have a phase offset between WEC and wave, and so crests and troughs may be estimated at different times by different WECs. The central WEC synchronizes the latching of the WECs by sending the “Latch” signal simultaneously to all WECs. It is, therefore, important to ensure that the phase offset for the central WEC is neglectable.
All other WECs must be able to latch the translator, measure their absorbed power and communicate with the central WEC, to whom they will send the information about the absorbed power and applied latching time after each wave. The control strategies of these WECs can be various, for instance, they might be WECs with a constant latching time (cWECs) which are not learnable, or self-learning WECs, but at least one must be a CL learning WEC (lWEC).
The lWECs must be equipped with a machine learning algorithm, like a variable look-up-table (LUT) or an ANN. In this paper, an ANN is used. The machine learning algorithm gets an input which is related to the sea state and outputs the control parameter, here the latching time. Choosing suitable in- and output parameters is essential for successful learning.
One central WEC and two or more latchable WECs, among at least one lWEC, are placed parallel to the unidirectional wave front. The CL is performed in the following steps:
The central WEC detects an extremum (crest or trough).
The central WEC calculates the wave period from the time passed since the last extremum and calculates the mean wave period for the last waves. Then it sends the “Start” (Latch event) message to all converters.
The WECs will apply a latching time based on their policy and the mean wave period. They continuously measure their absorbed energy.
The central WEC detects an extremum and sends a “Stop” signal.
The WECs calculate their average absorbed power and send this information together with the applied latching time to the central WEC.
The central WEC compares the power absorption and sends the applied latching time of the WEC which absorbed the most power together with the mean wave period to the lWECs.
The lWECs adapt their policies based on the mean wave period and the best applied latching time.
After the training is finished, the procedure repeats from step 3.
The previous implementation of this algorithm used a “deep” ANN [
14] to estimate the optimal damping at each time from a short time series of the line force signal. However, despite the deep network the ANN was not able to classify the sea state correctly; the variation of the waves in the short term is hard to predict.
In this paper, we choose instead the approach of using a small “shallow”-ANN with three hidden layers and three neurons in each hidden layer. Assuming that a wave state will not change rapidly, the average wave period of the last nine waves is used as the input. This may reduce the noise in the learning data and the ANN can focus on learning the best latching time for a sea state rather than a single wave optimization. The mean wave period is hereby encoded in 10 input units of which only one is active at a time, each representing a wave period interval. Input unit one is representing a wave period between 0 and 1 s, and input neuron 10 represents a wave period between 8 and 9 s. Similarly, the output layer consists of 13 neurons, each assigned to a latching time, ranging from 0 s for output unit one, to 3 s for output unit 13. A SoftMax function determines the highest output unit. A sketch of the network can be found in
Figure 1.
After the learning phase, the performance of the WEC is tested in new sea states. The learning is deactivated and the lWECs will rely on the policy learned to find the suitable control parameters.
2.2. Linear Latching Time Control
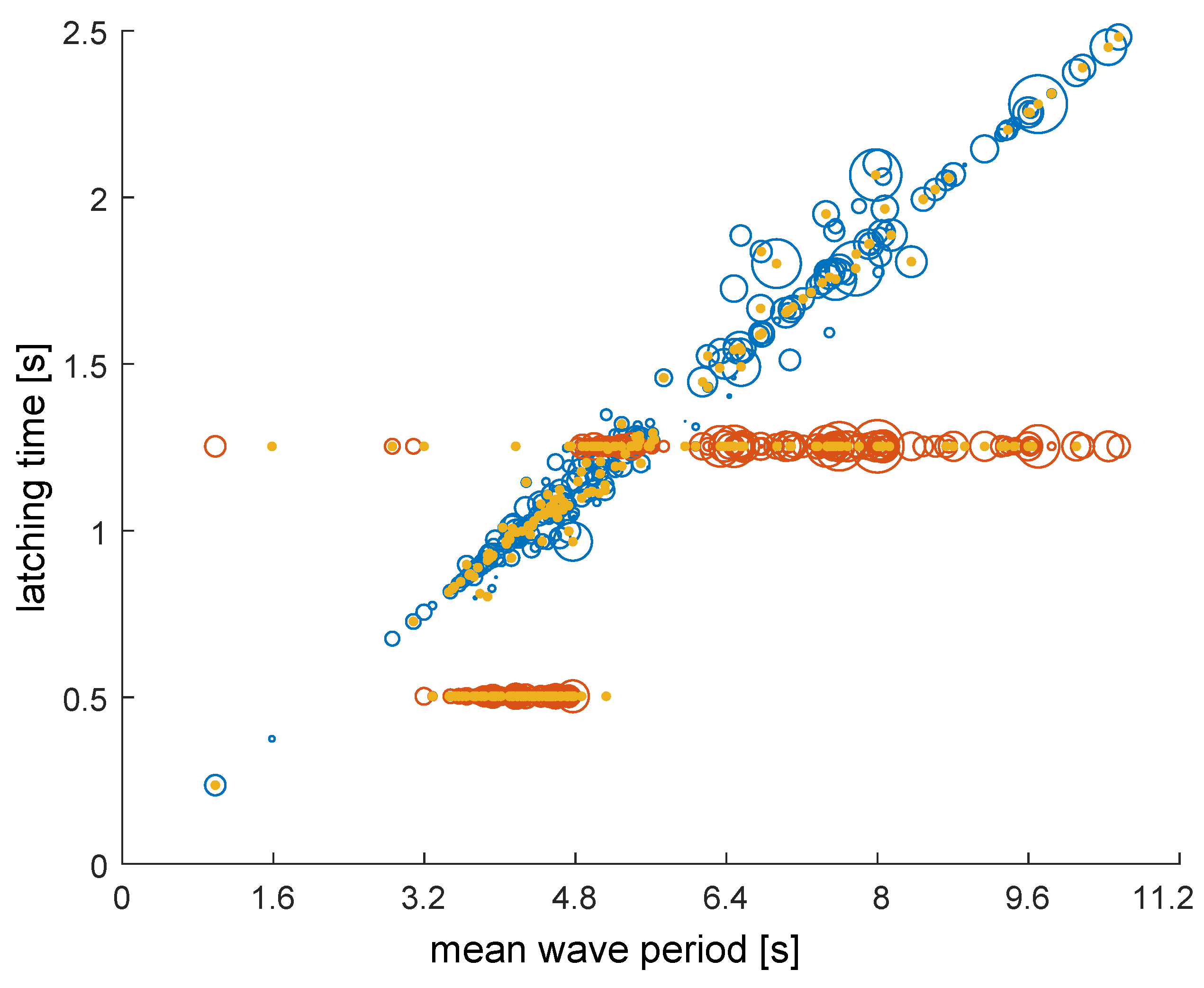
As the optimal latching time is the difference between the wave period and the WECs natural period of oscillation, there should be a linear relation between wave period and latching time. Ideally the latching time is 1/4th of the wave period, if latched two times per period. As the wave period is not known in advance, the mean period
, over the last nine waves which is also used in the CL strategy, is used to determine the latching time
:
where the constant
c is obtained experimentally. This control is referred to as linear latching in this paper.
Due to the theoretical relationship between wave period and optimal latching time, it is expected that this strategy will outperform all other strategies and is therefore used as a reference.
3. Numerical Model
The simulation was performed using a two-body model (buoy and generator) for each WEC. It is based on linear potential flow theory, assuming non-steep waves and an irrotational and incompressible fluid. These assumptions are in good agreement with the sea states used and the characteristics of water. The hydrodynamic coefficients of the body-fluid interactions were calculated using boundary equation method (BEM) with the software WAMIT [
22]. To reduce the complexity, it is assumed that the buoy has only one degree of freedom (
x) in the heave direction. More about the theory used for the model can be found in [
23].
The incident wave will act with a force
on the buoy:
with
being the surface elevation and
being the impulse response function of the buoy to the surface elevation. The index
i refers to the buoy number in the array. Similarly, the radiated wave, caused by the motion of the buoy is obtained:
where
is the response function of how the motion of buoy
i influences buoy
j. The hydrostatic force is the product of the buoyancy
at equilibrium and the offset (measured from the equilibrium) position of the buoy
,
The equation of motion for buoy
i is:
with
being the line force (see below),
the added mass and
is the weight force of the buoy:
, where
is the mass of the buoy. The buoys are, as well as the line and the generator, identical for all WECs. The generator is modelled as an ideal mass-damper system:
with
being the electrical generator damping,
the weight of the translator and
the position of translator
i.
The buoy and the generator are connected by a line, which will only contribute with a force if it is under tension, and with no force if slack:
where
(set to 1 GN/m) is the line stiffness and
(set to 10 kNs/m) is the line damping.
The coupled Equations (
5)–(
7) were solved using a delayed differential equation solver (DDE) with a constant time step of 1 ms.
4. Experiments
In the simulation as well as in the physical wave tank tests the CL strategy was performed with four WECs: one central buoy without latching, two with constant latching (cWEC) time and one ANN-based lWEC. The WECs used for numerical and physical experiments differ slightly, details for both WECs can be found in
Table 1.
In the numerical simulation, the central WEC was modelled as a latching WEC with a latching time of 0 s but the same damping and characteristics as the other WECs, so that it could participate in the CL as a cWEC. In the wave tank test, the generator damping for this WEC was set lower to increase the accuracy of the wave detection and therefore its power absorption is not included in the CL strategy.
The central WEC estimates extremes with its translator position. To avoid saddle points detected as extremes and problems caused by high frequency oscillations, the central WEC will wait after an extreme position until it moves a distance
in the opposite direction, before sending the wave detection command. A sketch of the extreme detection algorithm can be found in
Figure 2.
4.1. Wave Sequences
All sea states used in this paper are calculated based on the Bretschneider spectrum and are characterized by the significant wave height and the energy period .
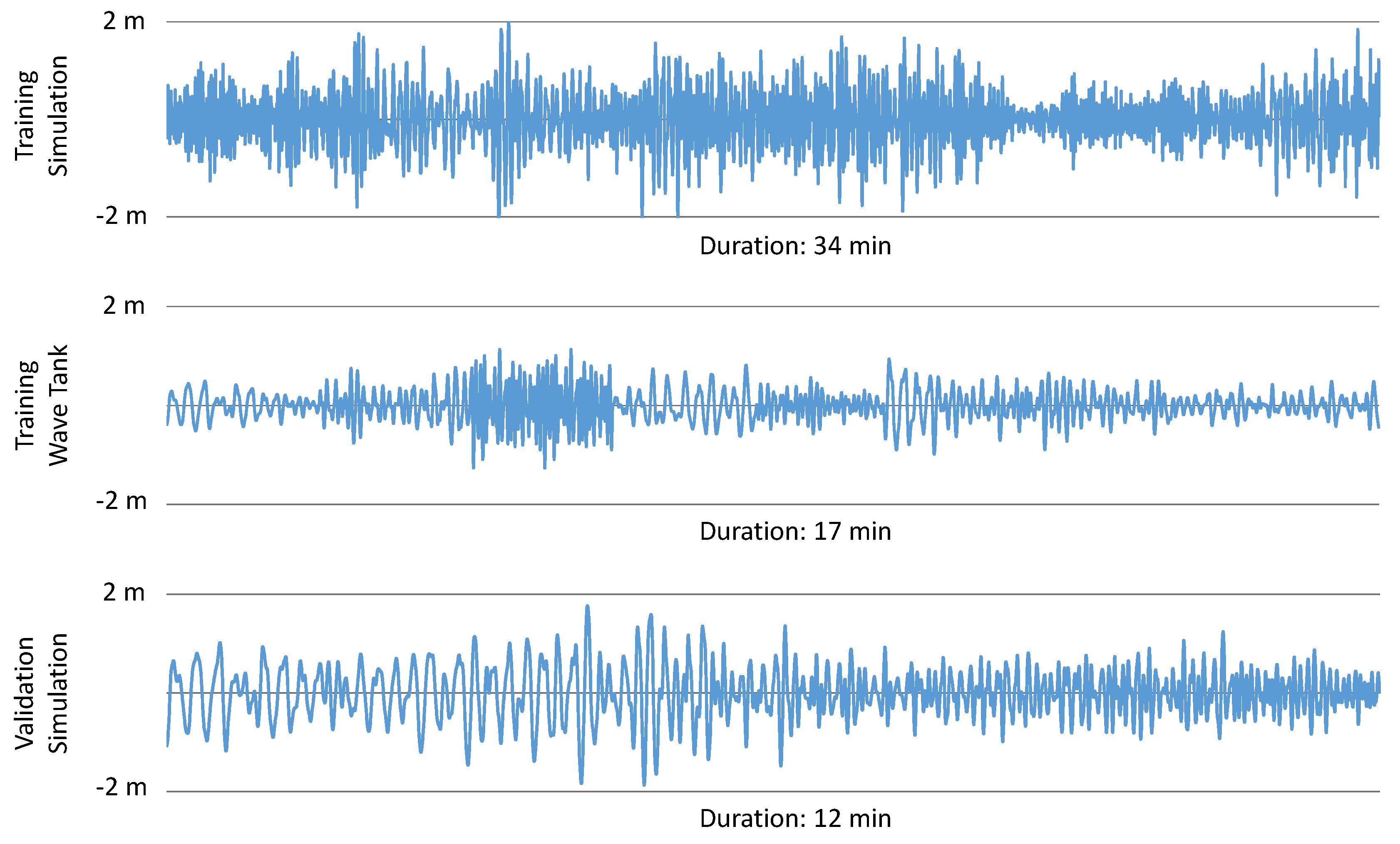
Besides single sea states used for evaluation in the numerical and wave tank tests, three wave sequences containing a medley of sea states are used for training (numerical and physical tests) and evaluation (only numerical tests). These sequences are made of wave energy periods between
, and
. In the simulation the wave heights are ranging from
to
, while for the wave tank tests they are limited to
to avoid large forces on the equipment. The training waves are longer and consist of more sea states. While using the same pool of sea states, there is no overlap of sea states between training and validation waves. Training and validation sequences can be seen in
Figure 3.
4.2. Simulation
First, the latching time constant c for the linear latching control was determined with the training wave to . The pre-tests showed that the position in the array has a small influence on the absorbed power: The WECs in the outer position absorbed slightly more power. Therefore, the performance of each strategy was evaluated at the same array position.
4.3. Wave Tank Test
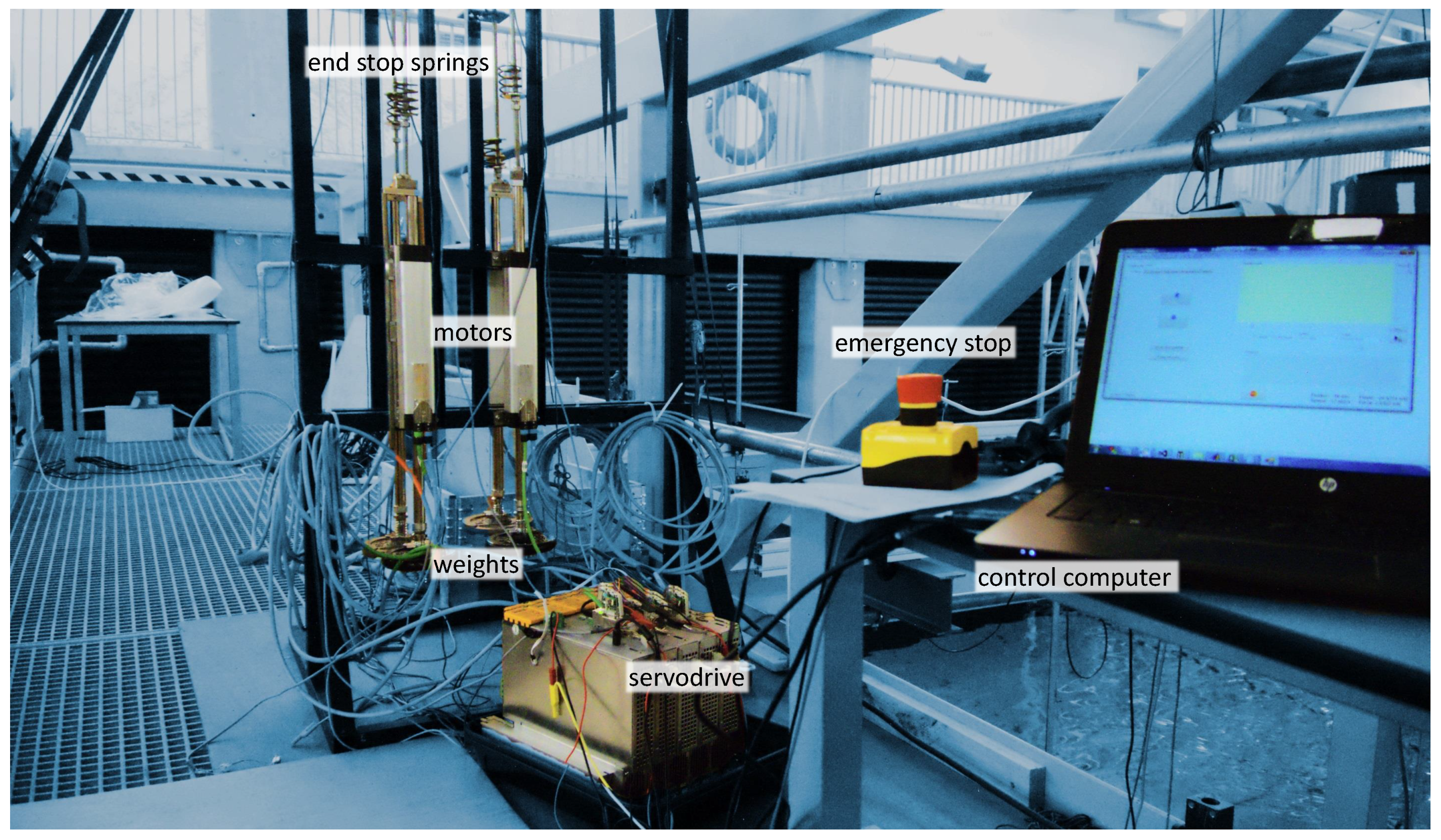
One of the big issues with advanced control algorithms and especially latching is, that they might be comparably easy to implement in a numerical simulation, but not in a real control system. To validate the strategy presented under conditions close to reality, a physical 1:10 scale model was built and tested in the ocean basin wave tank in the COAST laboratory of the University of Plymouth. The mechanical set-up, which can be seen in
Figure 4, consists of a Parker ETT-050 tubular electric motor, mounted on a steel frame. A rod is installed on the top of the motor, holding one spring on the upper and lower end of the stroke length, preventing the set-up from damage when moving beyond the stroke limit. On the lower end of the rod a weight is installed, so that the total weight of the translator is about 5 kg. The translator of the motor is attached via a line to the buoy. The motor stands on a gantry over the wave basin and is connected to the buoy via a line, which is guided by a pulley system first above the gantry, then to the bottom of the wave basin and from there to the buoy. The parameters of the physical model can be found in
Table 1.
The position of the four WECs used in the wave tank can be seen in
Figure 5 and the latching of a buoy in the array can be seen as a picture sequence in
Figure 6. To calibrate the system different sea states were run while all WECs applied the same latching, so the influence of the position and the mechanical differences on the absorbed power of each WEC could be estimated. It showed, that the power differs significantly between the WECs: WEC D (normally performing the long constant latching time) and B (normally performing the lWEC) reaches 80% and 98% of the power of WEC A (normally performing the short constant latching time). This difference was not considered during the learning process. Small differences between the WECs may also appear in reality. However, to be able to compare the strategies accurately, the absorbed power in the results was corrected accordingly.
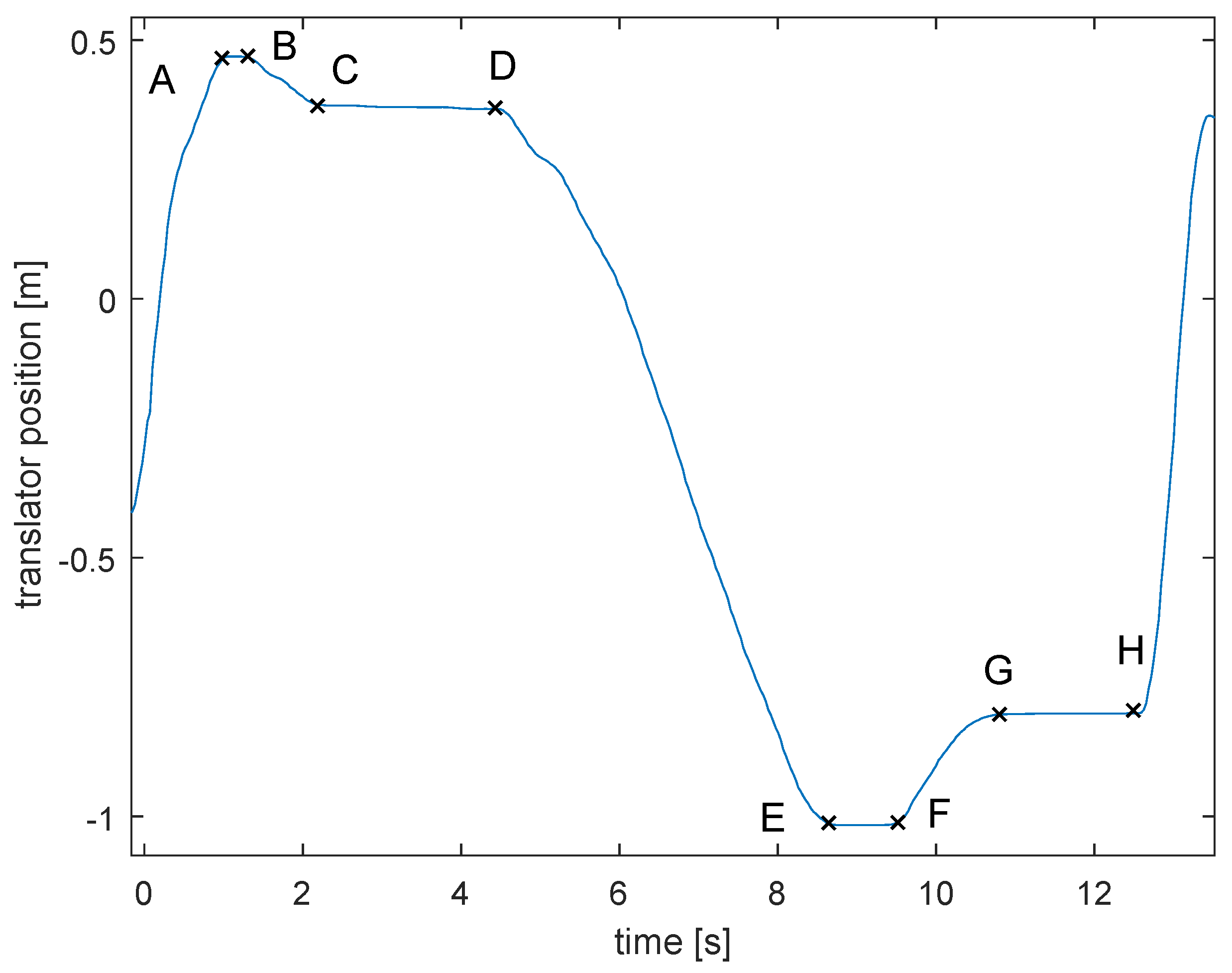
Due to limitations in the dynamics of the electromechanical system, the latching is non-ideal, as can be seen in
Figure 7: In the unlatched state, while applying constant damping, the motor works in current control mode, applying a current proportional to the velocity to simulate the generator damping. Between A and B (E-F) the translator is stuck, as the motor needs time to ramp the current down. Shortly after B (F) the crest (trough) is detected, forcing the motor to switch into velocity control mode (with the set value 0) and starts ramping the motion down. Therefore, it must work against the increasing force of the generator weight (buoy). The motor is finally stopped in point C (G). At D (H) the translator is unlatched. These delays must be considered when choosing the latching time.
4.4. Differences of the CL in Numerical and Physical Tests
The control software for the physical WEC and the simulation provide the same interface for the control algorithm, so the same implementation of the ANN runs on both systems. However, the time for the wave tank test was limited and the absorbed power could not be compared as well between the WECs as in the simulation. After a few test runs it was decided to change the parameters of the algorithm slightly:
The number of periods which are averaged was reduced from nine to four, as the sea states in the training wave sequence were shorter.
The absorbed power was not considered in the learning rate.
The quantization of the wave periods was (due to rounding issues during the scaling conversion) limited to values between 0 and 3.12 s in steps of 0.26 s (full scale equivalent).
The learning is done in two steps: First online, during the wave tank test: Here the ANN gets direct feedback about the efficiency of its chosen values. The obtained data is then used for offline learning to speed up the process.
7. Conclusions and Outlook
In this paper, a collaborative control strategy, that parallelizes the training of a machine learning algorithm for WECs in an array is presented. The strategy was first presented in [
14] for a generator damping control and in this paper adapted for latching control. The lWEC was able to absorb more power than all cWECs, in the numerical simulation and in the wave tank tests, reaching nearly the efficiency of a WEC with average wave period proportional latching time. Unlike most control strategies it is not relying on a model; a complex characterization and modelling of the device, as for example mandatory for model prediction control, is not necessary.
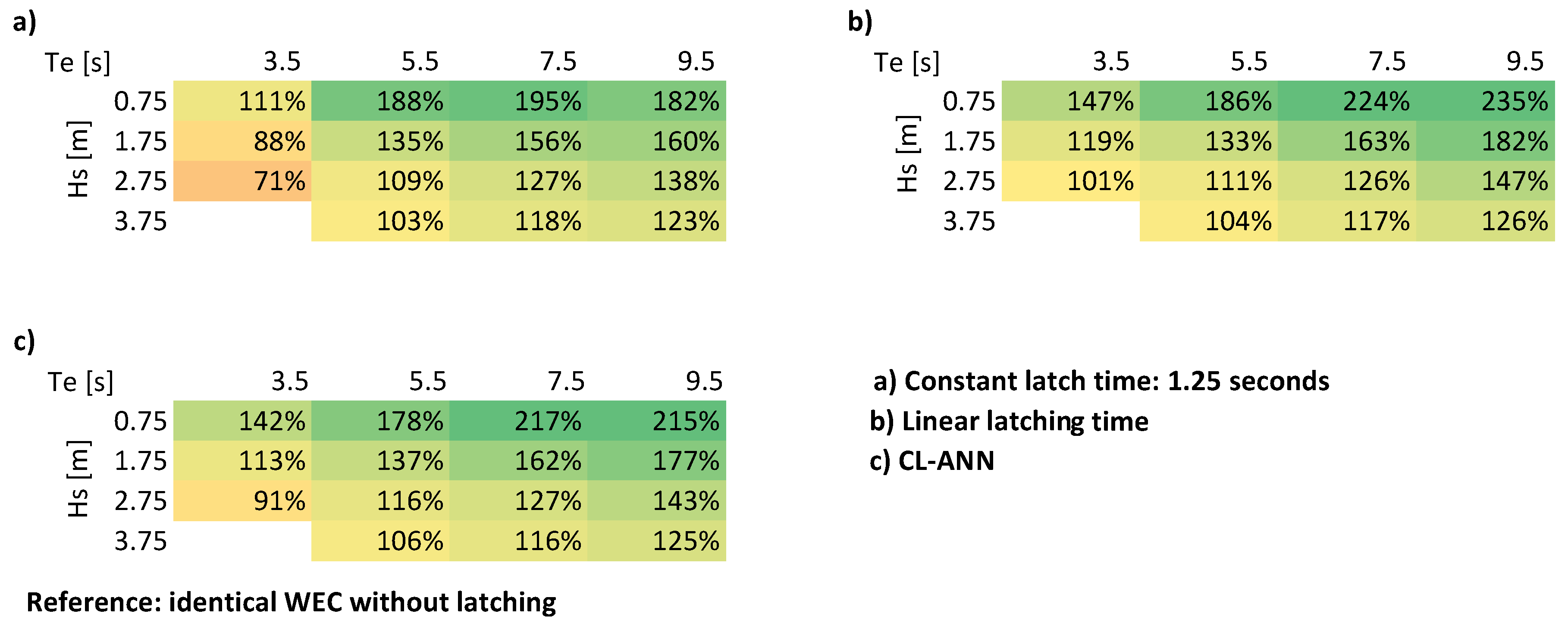
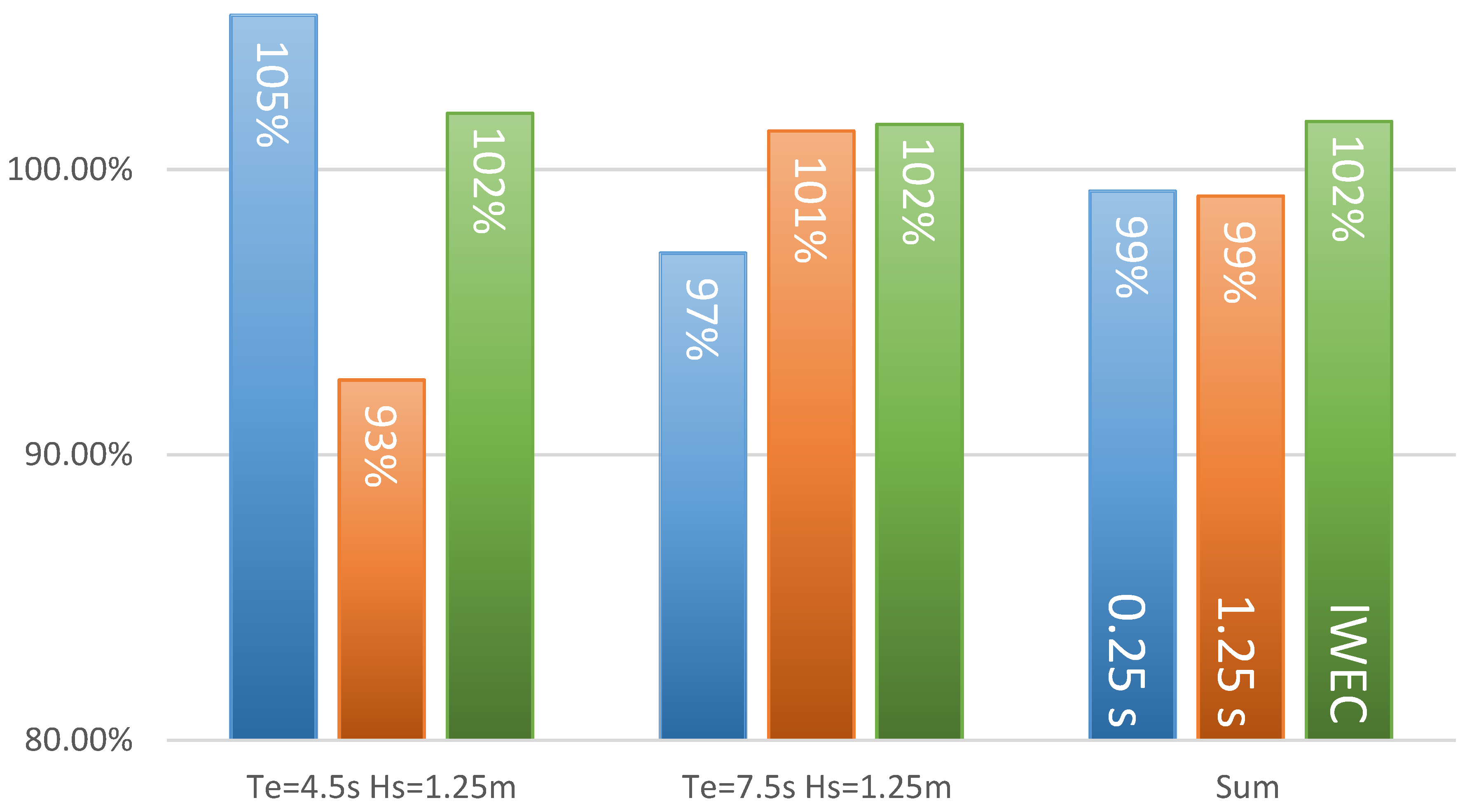
In the simulation, for some sea states the lWEC absorbs more than 30% more power compared to the best constant latching time in the test wave, and more than double the amount of the WEC without latching. The benefit is smaller in the wave tank test, were the lWEC absorbs overall only +3% more power than the best constant latching. This is caused by a non-optimal latching WEC, which lowers the advantage of the latching strategy in general.
A model-free, robust and easy to implement control algorithm with high efficiency is of course the ultimate goal of a control strategy, and it is, therefore, not surprising that this control strategy performs well when it comes to simplicity and robustness but is not as efficient as previously proposed model predictive or optimal control algorithms. However, the concept of collaborative learning is promising.
Another limitation is how the strategy handles omnidirectional waves and differences in the characteristic of the WECs. Here, an internal model of the WEC itself and a representation of the wave farm layout (maybe both combined in a self-organizing feature map) can be a possible solution. However, the wave tank test showed that it tolerates small divergences in the WECs characteristics.
With just one input parameter, the mean wave period of the previous waves, and a very small ANN, the lWEC used in this paper is very simple. Further work could focus on more complex ANNs, using more or different input units, for example adding the mean wave height or using a convolution network with a wave sequence as input, which could lead to a better categorization and may increase the performance of the lWEC significantly.

 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}