1. Introduction
Disturbance compensation is a very important aspect that needs to be considered in control system design for a particular process [
1]. In such a case, the control technique should be able to maintain the controlled variable close to the reference despite the external disturbances that influence the controlled process. For this reason, most industrial processes need a personalized control scheme to achieve the performance requirements [
2]. From a control system point of view, the process disturbances can be grouped as unmeasurable and measurable quantities depending on their origin. The measurable disturbances can be handled by the feedforward structure that can compensate the disturbance before its effect appears on the controlled variable. However, in many industrial applications, the control system consists of a feedback controller, since it is able to provide a set point tracking, reduces the influence of plant-model mismatch as well as compensates for process disturbances [
1,
3]. Due to this simple structure, the control system focuses only on one of these issues and provides weak performance for the other problems [
4]. In the classical approach, the feedforward compensator is obtained as the quotient between the disturbance and the process dynamics. Nevertheless, this structure is rarely realizable, e.g., due to dead time inversion issues. This problem has been analyzed by several researchers during the past decades and drives to design more advanced tuning rules for feedforward schema [
5]. Other approach to measurable disturbance compensation consists in the application of the MPC (Model Predictive Control) technique. Due to simultaneous solution for feedback as well as feedforward control, this control technique is frequently used in industrial processes [
6,
7]. Regarding the feedforward action, the most relevant advantage of the MPC algorithm is related to the prediction mechanism that can handle future disturbance information [
8,
9]. Nevertheless, considering the internal relationship, the MPC feedforward and feedback co-design needs a compromise, where the design is oriented considering the most relevant aspects [
10,
11].
Taking into account all these properties, a new predictive feedforward compensator has been recently proposed in [
12], merging advantages of classical MPC-based solutions. In this case, the compensator can be easily coupled with any feedback controller and its design is independent of other elements in the control loop. Moreover, it is also able to consider future disturbance estimations to improve a disturbance attenuation.
The disturbance compensation aspects are also very important in bio-processes, where the control technique has to reduce the influence of external disturbances [
13,
14], and this is the case of microalgae production in raceway reactors. In such a system, the main task of the controller is to compensate for the influence of external disturbances that affect the photosynthesis rate. The microalgae culture is influenced by many factors, where the most important variables are related to: solar light viability, temperature of the medium, dissolved oxygen and medium pH [
15]. In this context, a proper disturbance attenuation could improve the control system accuracy and, as a consequence, the biomass production performance. The remaining variables of the microalgae cultivation process such as dissolved oxygen and pH need to be regulated using a proper control system [
16]. Both variables, dissolved oxygen and pH, are characterized by highly changing dynamics (influenced by solar radiation and photosynthesis rate) and their values should be maintained within optimal values for each strain. The photosynthesis rate is influenced mostly by solar irradiance, temperature and pH among others. It is well known that injection of CO
2 has a strong influence on the pH level since it affects the growth medium. Moreover, the usage of CO
2 represents important operational expense for microalgae culture and its supply excess should be avoided [
17]. Taking advantage of this relationship, the control approach uses the pH value to define the amount of CO
2 and time instance for its injection [
18,
19]. Considering all previously mentioned aspects, the disturbance compensation scheme can play a decisive role in boosting control performance and improving the rentability in biomass production process.
In this study, we provide a practical evaluation of a predictive disturbance compensation technique introduced in [
12] in order to highlight the most important advantages and drawbacks of such a scheme. As was shown in previous works [
12,
20], the main advantage of such a technique is the ability to handle the complex dynamics required for perfect disturbance compensation. In the analysis performed previously, a complete knowledge of the process model was assumed and the future disturbance signal was known a priori [
20]. From the theoretical point of view, these assumptions allow us demonstrate that predictive feedforward compensator is able to compensate completely the disturbance before its effect appears on the controlled variable. Nevertheless, this assumption can be rarely achieved in an industrial control system, where the usage of simplified models is a common practice. Moreover, the future values of disturbance signals need to be estimated, which also introduces additional uncertainty resulting in performance degradation. Additionally, in this work, the original approach based on a GPC (Generalized Predictive Control) algorithm is extended, with a constraints’ handling mechanism in the feedforward controller being a new future and very important aspect from practical implementation point of view. Moreover, state of the future disturbances required for predictive mechanism is estimated using a Double Exponential Smoothing (DES) technique that was proposed in [
8] for MPC control techniques where future information on disturbance signal is required. In the performed study, we use PID and MPC techniques as a feedback controllers that are coupled with the predictive feedforward compensator to show its influence on the control performance in two cases. The evaluation is performed on the biomass production process using a raceway photobioreactor model developed in [
21]. The test bed is built using a first principle raceway reactor model as a process plant and all controllers are developed using linear model approximations obtained close to its operating point. This approach considers a plant-model mismatch allowing us create a realistic control scenario. Taking into account all these features, it is possible to obtain results similar to those obtained in the real plant. However, the implementation in simulation environments has the advantage of the repeatability of the external parameters that influence the control system. In such a way, the changes in production performance depend only on the applied control techniques and giving measurable changes in biomass production. All the analyzed control systems are evaluated using control performance as well as biomass production indexes. Additionally, the test bed system is evaluated in terms of energy usage efficacy.
4. Results
This section shows simulation experiments using the proposed predictive feedforward compensator coupled with different feedback controllers and applied to pH control in raceway photobioreactors. The predictive feedforward compensator was tested in simulation, where the nonlinear model described in
Section 3 was used as virtual plant. All data used in the simulation study were collected from the real photobioreactor operating in continuous mode at real conditions in Almería (Spain) during spring 2017. The simulations were performed for a period of seven days, where different profiles of solar irradiance have been considered, since it is the main disturbance that affects the pH control process during diurnal conditions (through the photosynthesis process). Moreover, in all considered control systems, the continuous signal obtained from the controller must be translated into a discontinuous signal used to drive the valve. For this purpose, a PWM technique is used, with a frequency of 0.1 Hz. Notice that microalgae growth requires that the operation variables must be maintained at optimum values, where for the microalga used in this work an optimal value of
is required.
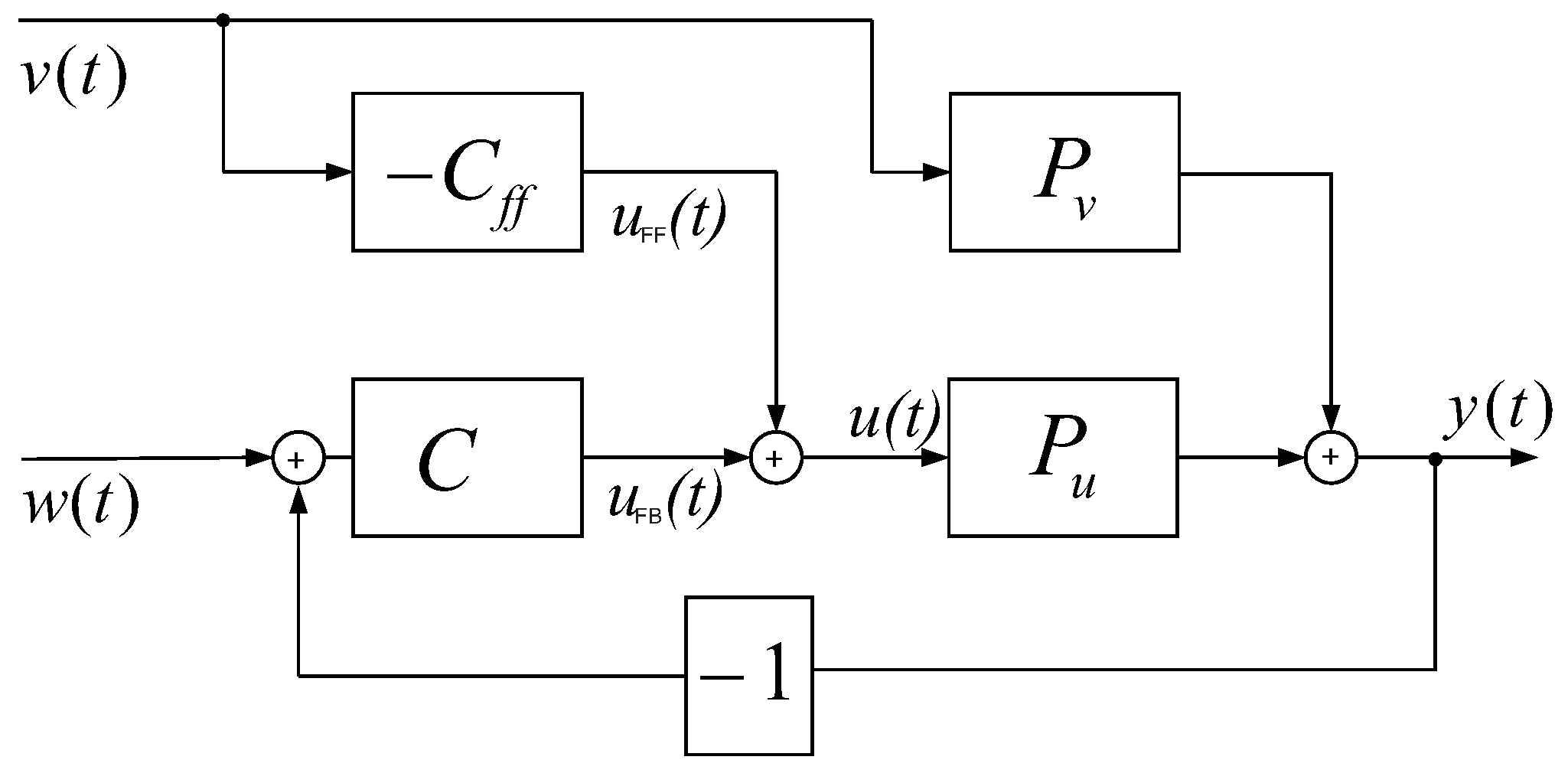
In this study, two different feedback control strategies, namely PI and GPC controllers, have used the influence of feedforward action. Notice that the objective of this study is not a direct comparison of the control schemes, but the analysis of feedforward predictive compensator and its influence on control performance in different control approaches. The effectiveness of the predictive feedforward compensator is analyzed through a simulation study where different approaches for measurable disturbances compensation are considered. The PI controller is tested in three configurations: self-contained (with no specific disturbance compensation technique), coupled with classical feedforward () and predictive feedforward compensator (). The GPC-based approaches include: stand-alone configuration (with no specific disturbance compensation technique), GPC with intrinsic feedforward action () and coupled with predictive feedforward compensator ().
The PI feedback controller was tuned according to the SIMC (Skogestad Internal Model Control) design rule [
31], and results in
and
. Moreover, the
compensator was obtained using the methodology presented in
Section 2 obtaining the following transfer function: in
, where a non-realizable part was omitted (due to a dead time inversion problem). The GPC-based feedback controllers were set up to satisfy required performance resulting in:
,
,
,
. For
configuration, all parameters are the same as for the stand-alone variant and only measurable disturbances are considered during the development of the algorithm (see
Section 2 for details). The
compensator parameters were set to
,
,
,
(these parameters were kept unchanged for all configurations). Additionally, the future disturbance estimations were obtained using a DES technique and its configuration parameters were set to
and
following recommendations from [
13]. All controllers have been implemented with sampling time
min. Moreover, due to the physical limitation of the actuator, the control signal has been saturated between 0–100% and considered in an optimization procedure for all GPC-based approaches including the PFF compensator. For the PI-based configuration, the antiwindup technique was exploited to deal with control signal saturation.
The control performance for each analyzed configuration was determined using the following indexes:
where
represents Integrated Absolute Error between reference and controlled variable, the
refers to Integrated Absolute Control signal and
stands for Control System Effort.
Moreover, three complementary indexes are included for biomass concentration , photosynthesis rate , and total amount of flue gases supplied to the raceway photobioreactor. The first two are obtained from the nonlinear process model and are used to demonstrate the influence of the evaluated algorithm on microalgae growth. The former index shows the usage usage of the control medium (flue gases), which can be directly related with energy consumption. The bigger value means that more energy was consumed for gas compression, being less effective from a economic point of view.
Since a graphical result for seven days and all analyzed control techniques will not allow one to see the results properly, one representative day has been selected for PI and GPC feedback controllers, which are shown in
Figure 3 and
Figure 4, respectively. These figures show the results of different feedforward approaches coupled with two feedback controllers in order to check the efficiency of disturbance compensation for pH process in a raceway photobioreactor. For each feedback control technique, different disturbance compensation approaches are tested and all other parameters and variables are kept unchanged. In such a configuration, the eventual changes in control performance are due to the efficacy of the disturbance attenuation, which permits us to compare different feedforward schemes.
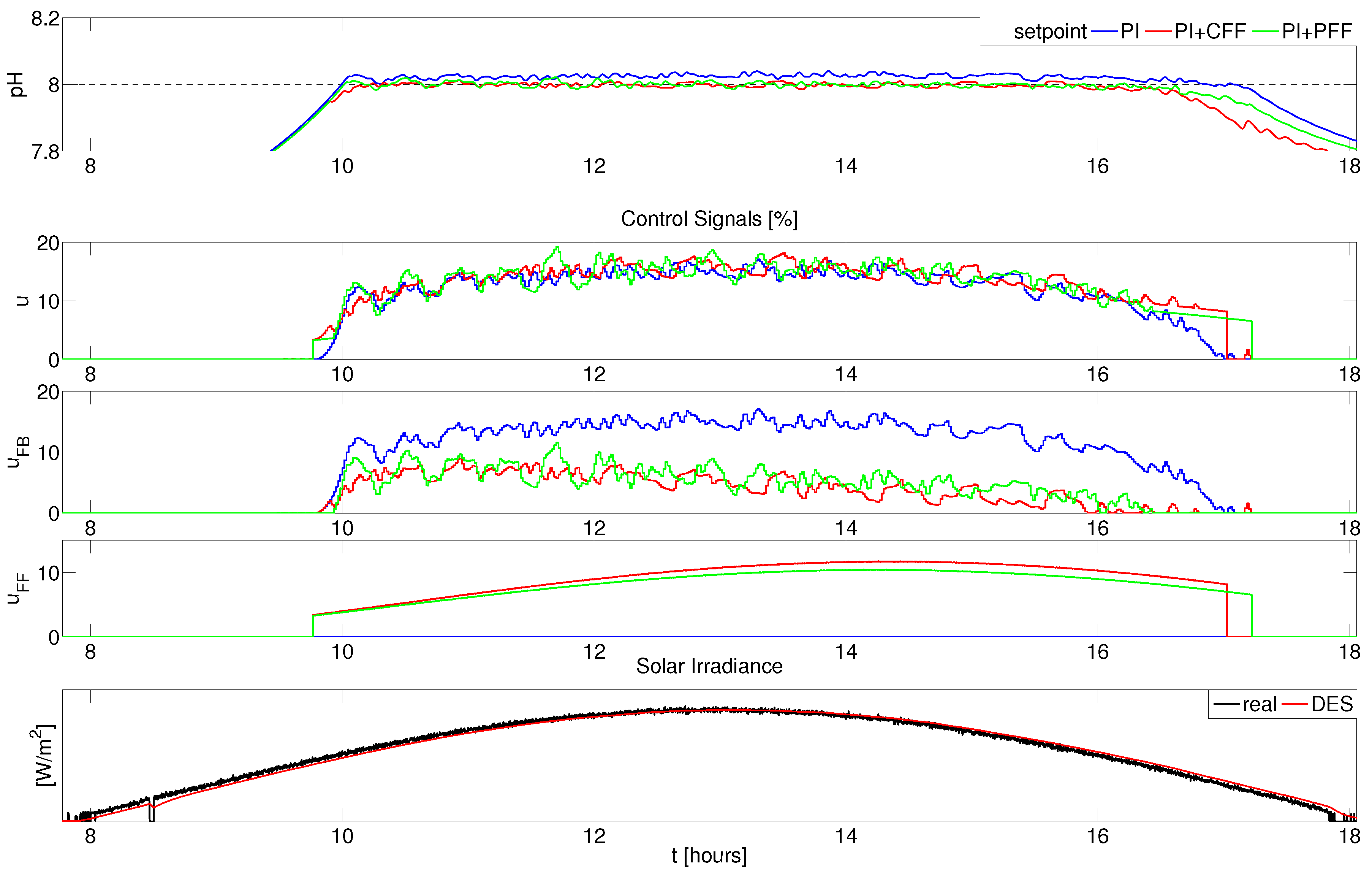
Figure 3 shows the control results for the configuration where the PI controller is used in feedback loop. For this case, three configurations have been evaluated where disturbance compensation was performed using: feedback controller (
), classical feedforward compensator
and a predictive feedforward compensator
. From the first plot in
Figure 3, it can be seen that all tested schemes are able to maintain the pH level close to its set point. Nevertheless, the configurations using the dedicated disturbance compensator,
and
, obtain better precision. In these two configurations, the control signal is composed of two parts,
and
, obtained from feedforward and feedback controllers, respectively. The
component provided depends on the solar irradiance, and proper structure of the compensator. Moreover, from the
plot, it can be observed that significant differences between
and
are obtained. This is due to a predictive approach used in
that considers dead time inversion and exploits the future disturbance information estimated using the DES technique. In such a case, the estimated future values of the solar irradiance (see red plot on bottom graph in
Figure 3) has an offset in comparison to the real solar irradiance signal. Notice that, in the schemes with feedforward compensators, the resulting control signal from the compensator is applied only if the pH level is bigger than 7.9; otherwise, it is set to zero. This condition is set to prevent CO
injections when pH is below the set point.
From the obtained results, it can be seen that none of the analyzed compensators are able to completely attenuate the disturbance effect. Even the approach with future disturbance compensation does not achieve the complete attenuation. This is mainly due to two reasons. The first one is related with plant-model mismatch and the second can be linked with future disturbance estimation errors. Both factors are making the predictive disturbance compensator less effective in comparison to the nominal case where no modelling and estimation errors are considered. However, the performance is better in comparison to the classical approach, which is confirmed by the indexes related to control accuracy and process performance.
The average performance indexes for the previously analyzed configurations are summarized in
Table 1. The
index shows that the best accuracy, for the analyzed seven-day period, is obtained for
. On the other hand, the
approach improves the
measure in comparison to the configuration where only the feedback controller is used to compensate the disturbances. Additionally, the
configuration obtains the lowest
measure, being the most effective in control resource utilization. The improved accuracy of the approaches with feedforward compensators is obtained at the expense of higher control signal variability, which is shown by the
index where
obtains the biggest value. Besides that, the predictive feedforward compensator uses the lowest amount of the flue gases (see
index) from all tested configurations, being the most energy efficient.
From the process performance point of view, application of feedforward compensators improves the overall productivity of the biomass, which is confirmed through and measures. The configuration provides the best growth conditions, keeping the pH value close to its reference for a longer time. The photosynthesis rate increments were shown using measure provided by the nonlinear model. This index reflects the oxygen concentration and it is proportional to the photosynthesis rate. The increased 5.6% for the configuration when compared to the technique. Similar improvements are obtained in terms of energy savings. The changes in energy required for control purposes are calculated using the index. This measure expresses the volume of the flue gases used during the seven-day time period. The energy usage for the microalgae production in the raceway reactor is mainly related to the energy consumed by the flue gas compressor. Based on this issue, a direct relation between and energy used can be established. The reduced amount of gas usage by the control scheme has a proportional impact on the energy savings. In this case, the based scheme reduced the energy usage about 4.5% regarding the . These facts are crucially important for biomass production from microalgae since they increase the process rentability.
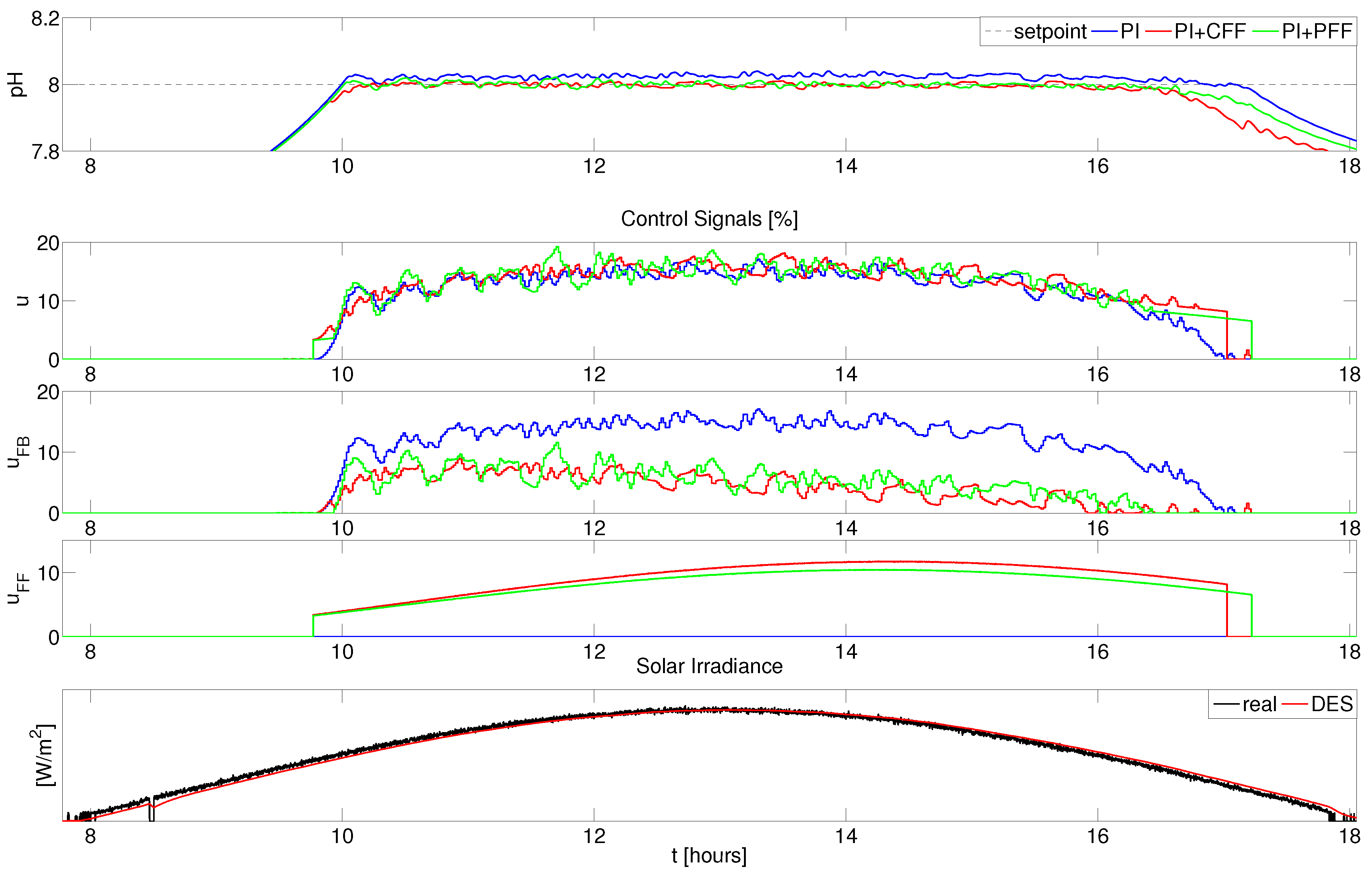
The results for the second control scenario, where the GPC algorithm is used as a feedback controller are shown in
Figure 4. As in the previously analyzed scheme, the
compensator combined with the GPC controller provides the most accurate control of the pH. In such a configuration, the pH value is controlled close to its reference and the signal is characterized by reduced oscillations. The GPC standard intrinsic disturbance compensator,
, is able to improve the performance of the stand-alone GPC, but, due to design compromises (co-design trade-off between feedback and feedforward), it is less effective than the proposed predictive feedforward compensator. This fact is even more visible when the stand-alone GPC configuration is analyzed. In this case, the disturbance compensation is performed through a feedback loop, since no additional compensator is included. The disturbance compensation oriented design (allowing quick change in control signal) results in overshoot in the initial stage of the day [
20]. Notice that, in all analyzed configurations, the feedback controller has the same tuning, and the disturbance compensation technique consideration improves the performance. In such a case, the best accuracy is obtained for the
configuration. When the control signal is analyzed for all tested configurations (plots two, three and four in
Figure 4), it can be observed that the predictive feedforward compensator is starting before other configurations. This is mainly due to the predictive mechanism that is able to handle future disturbance providing the disturbance attenuation before its effect appears on the controlled variable. Additionally, the possibility for optimal adjustment of the control signal weighing factor
is another element that has influence on control signal changes. It should be highlighted that
configuration in nominal cases (no modelling and disturbance estimation errors) should be able to attenuate completely the effect of disturbance [
12]. In industrial practice, it will be impossible to meet this condition and consequently one can not expect perfect compensation of the measurable disturbances. Nevertheless, significant improvements in control performance regarding classical approach can be obtained as shown in the analyzed case.
Table 2 summarizes the control performance indexes for a scheme where the GPC controller is used in the feedback loop. In this case, the lowest value of
is obtained by the
. The
scheme improves stand-alone GPC, but it is less accurate in pH regulation than the predictive feedforward compensator. Moreover, it can be observed that configurations with disturbance compensation mechanism reduce the control effort,
, which has positive impact on the CO
2 usage. For the
index, similar behavior as the previously analyzed scheme was observed. The configurations with disturbance compensation technique provide the control signal that is characterized by increased variability, whereas the control signal from
obtains the biggest
index value. From all tested configurations, the best growth conditions were obtained for
, which improves
index about 6.4% in comparison to the
. Moreover, stand-alone GPC was characterized by the biggest consumption of the control resources (
). The smallest usage of flue gases was obtained by
configuration. As a consequence, the predictive feedforward compensator is the most energy efficient approach, reducing it about 3.8% in comparison to the
scheme. This fact is of great importance in raceway photobioreactor biomass production, since it allows the possibility to reduce the process maintenance costs.
On the other hand, application of measurable disturbance compensation techniques has a positive influence on the photobioreactor productivity, which is represented by the measure. From this index, it can be observed that the highest productivity is achieved for , improving the stand-alone GPC algorithm as well as configuration. In such a case, has increased about 9%. This improved productivity is obtained with lower control resources utilization having a positive impact on the process performance.
From the obtained results, for both feedback control techniques, it can be deduced that the predictive feedforward compensator can provide better performance than the classical approach. Nevertheless, its final performance will depend on plant model mismatch and disturbance estimation accuracy. As shown in the previous analysis, the predictive feedforward compensator can handle measurable disturbance in a more efficient way in comparison to the classical feedforward compensator as well as GPC with intrinsic compensation. This realistic evaluation considered aforementioned issues for the pH control problem in the raceway photobioreactor, where important benefits for this particular process were obtained. Independently on the feedback controller, the application of predictive feedforward compensator results in an improved photosythesies rate, providing an average increase of 6% , and where the biomass concentration was increased about 4%. At the same time, the average energy usage was reduced about 4%.

 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}