Coordinated Control of Multi-Type Energy Storage for Wind Power Fluctuation Suppression


Abstract
:1. Introduction
2. Multi-Type Energy Storage for Wind Plants
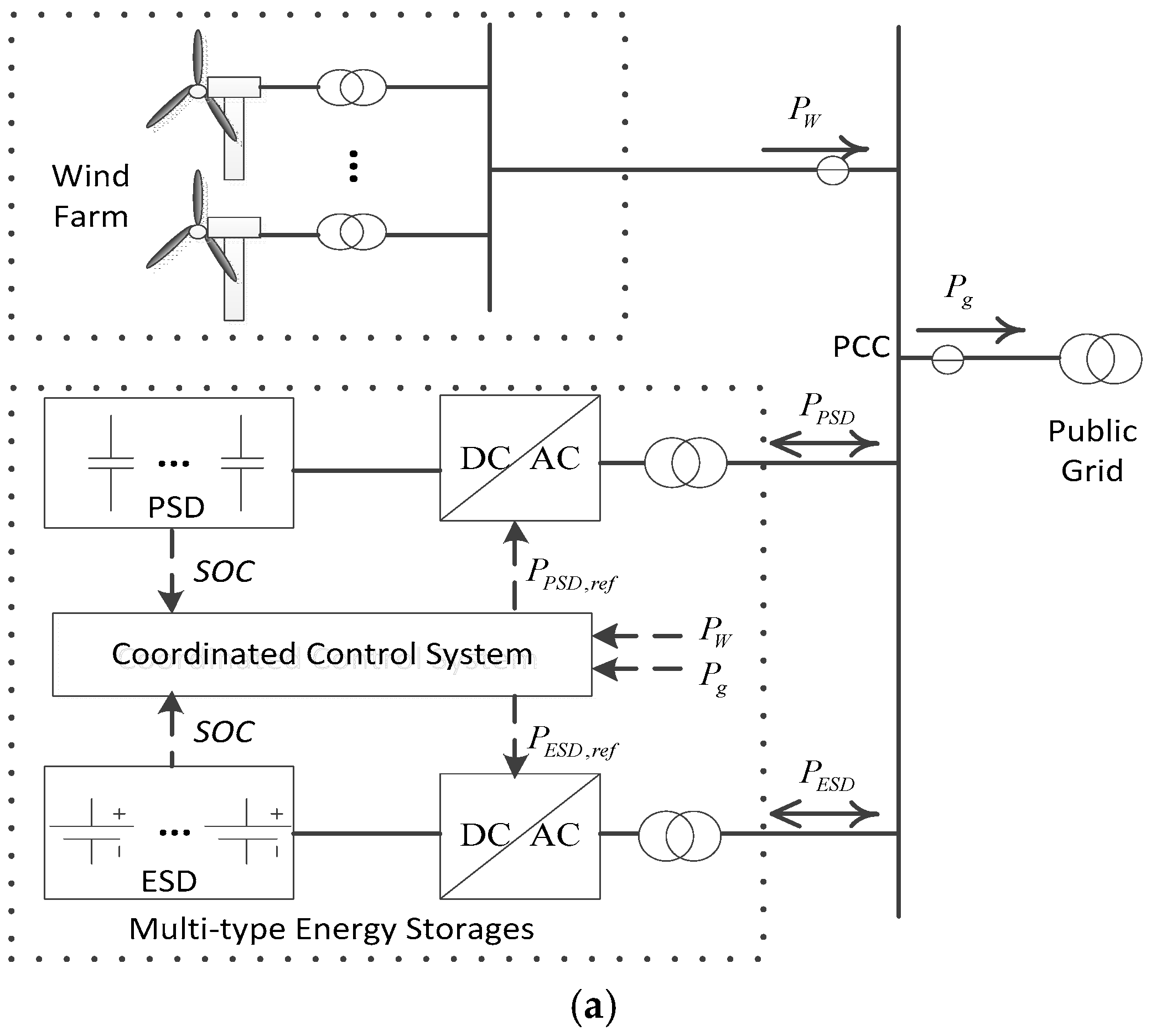
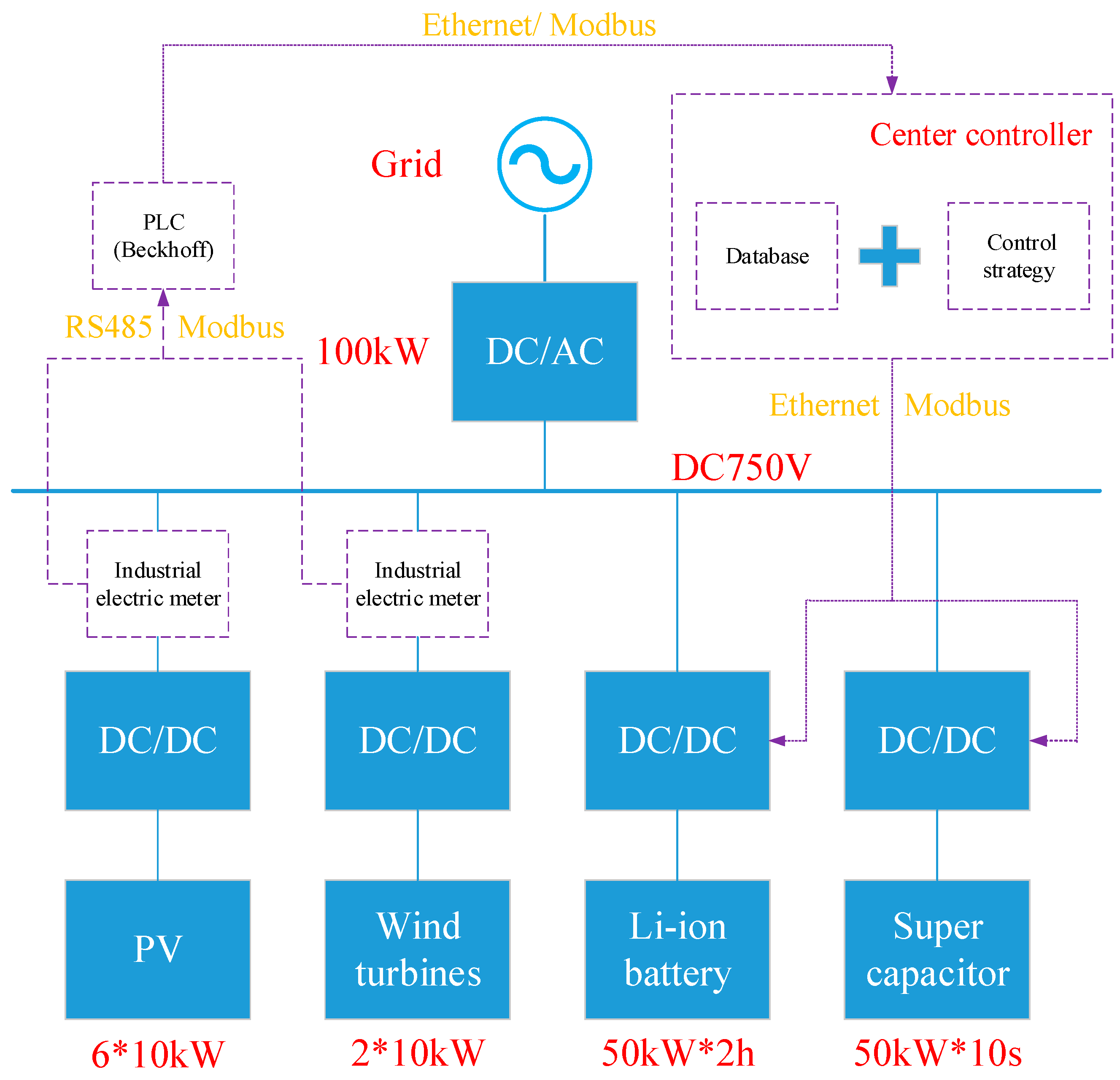
2.1. System Description
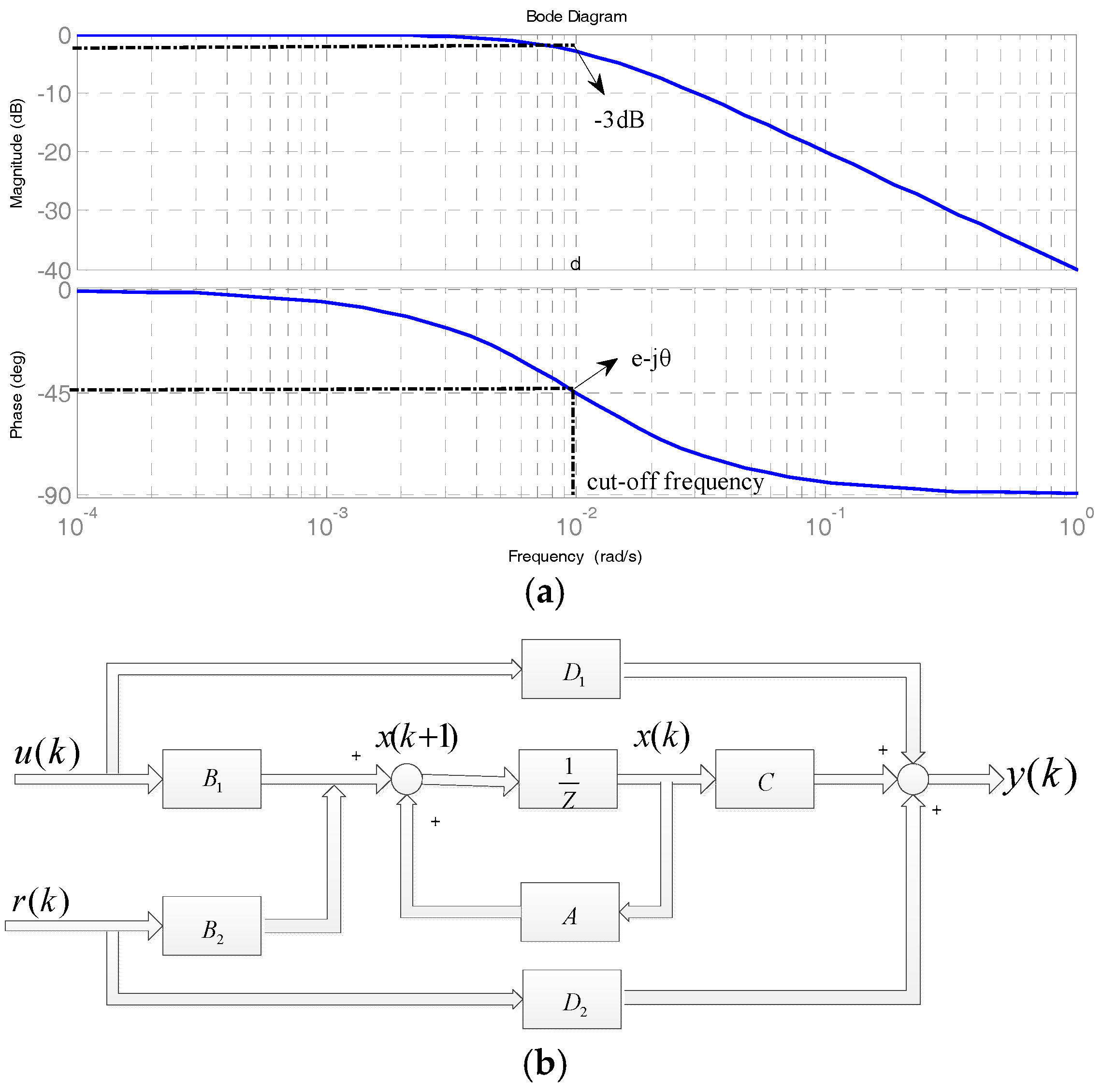
2.2. MPC State Space Model
- (i)
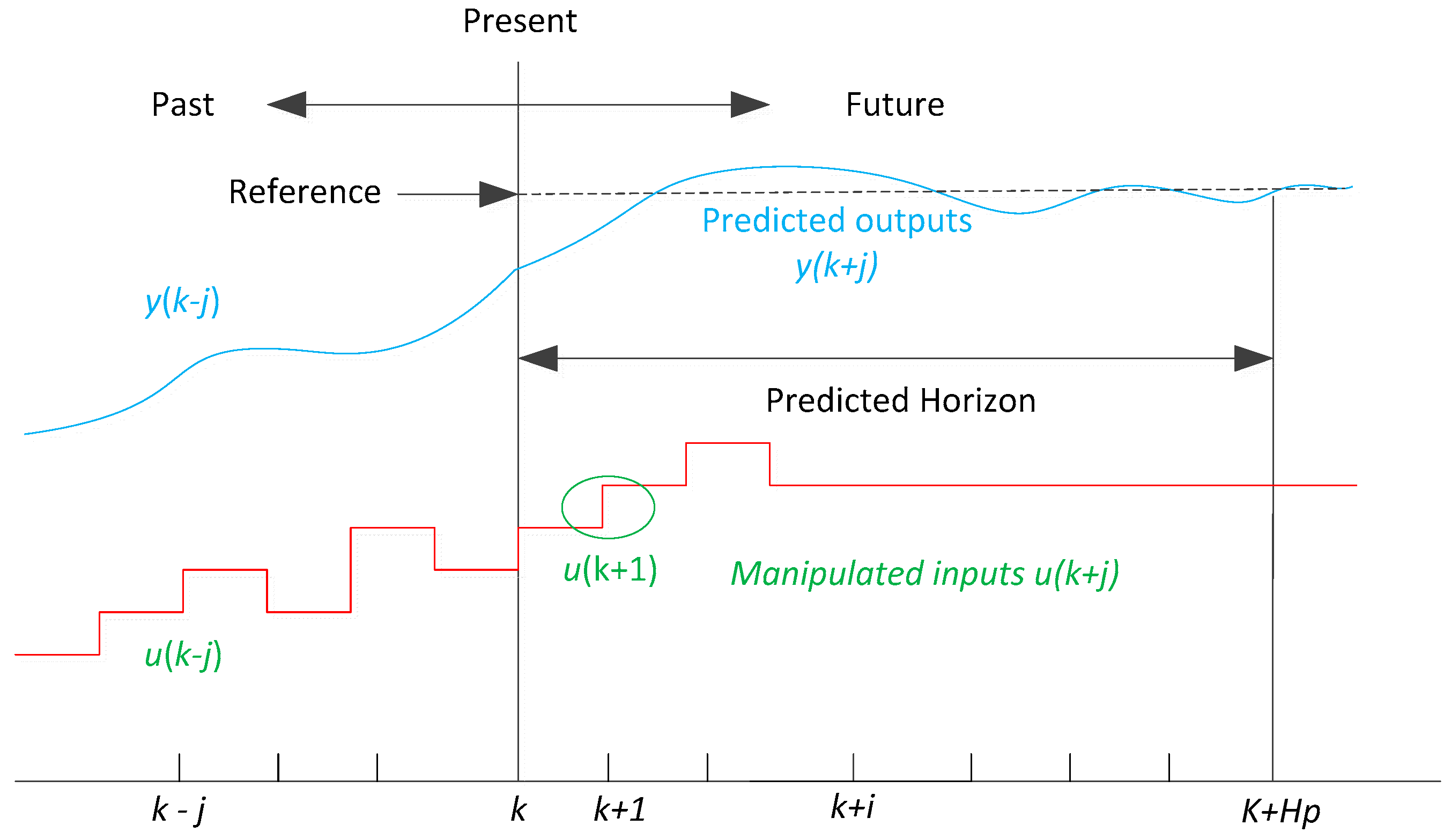
- At time k and for the current state x(k), an open-loop optimal control problem is solved on-line over the next few steps taking account of the current and future constraints. Then the control instructions of the next few steps of k + 1, k + 2, …, k + Hp can be obtained, where Hp is the predicted horizon.
- (ii)
- Apply the instructions in the first step of k + 1 in the optimal control sequence.
- (iii)
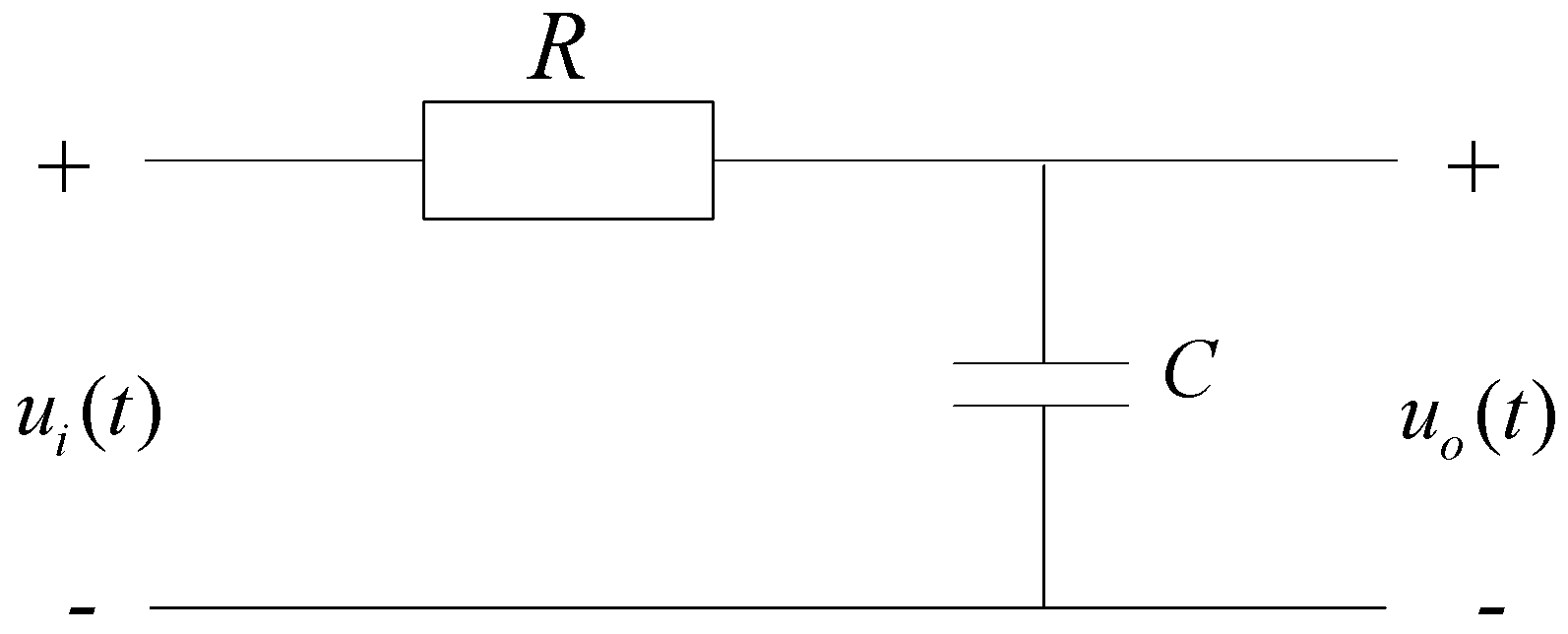
2.3. Traditional LFA
3. Coordinated Control Scheme
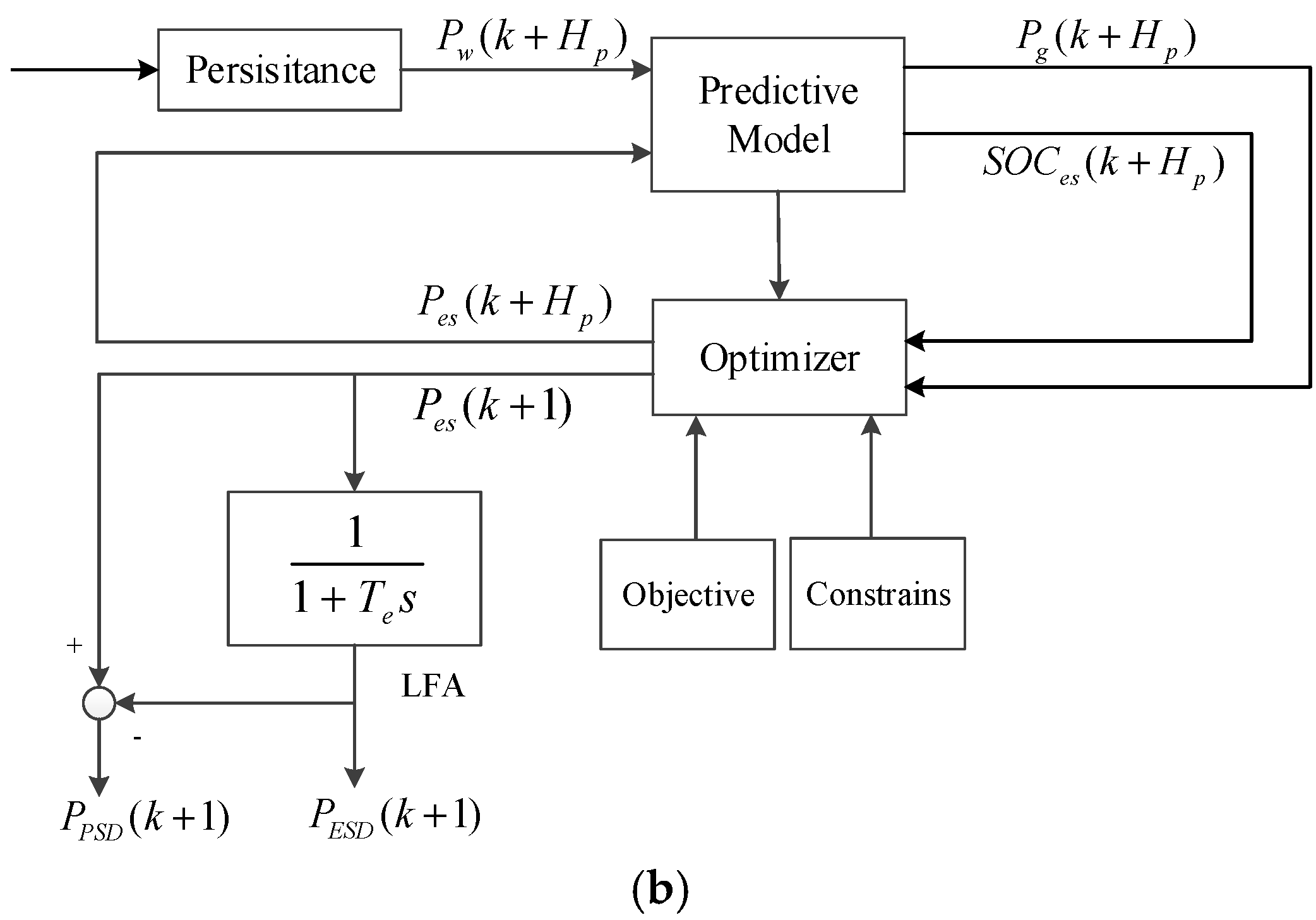
3.1. MPC Control for Energy Storage Systems
3.2. Power Allocation between PSD and ESD
3.3. Simulation Flowchart
- (1)
- Wind power data is imported from database;
- (2)
- Persistence model is established to get wind power at time k + Hp based on wind power at time k;
- (3)
- If the wind power data length is greater than Hp, SSM can be established; Otherwise, go back to step 1;
- (4)
- Constraint matrix is established on the basis of the fluctuation rate;
- (5)
- The total energy storage power is obtained by using the QP Toolbox to solve the quadratic programming equation;
- (6)
- (PSD power) and (ESD power) are allocated with LFA.
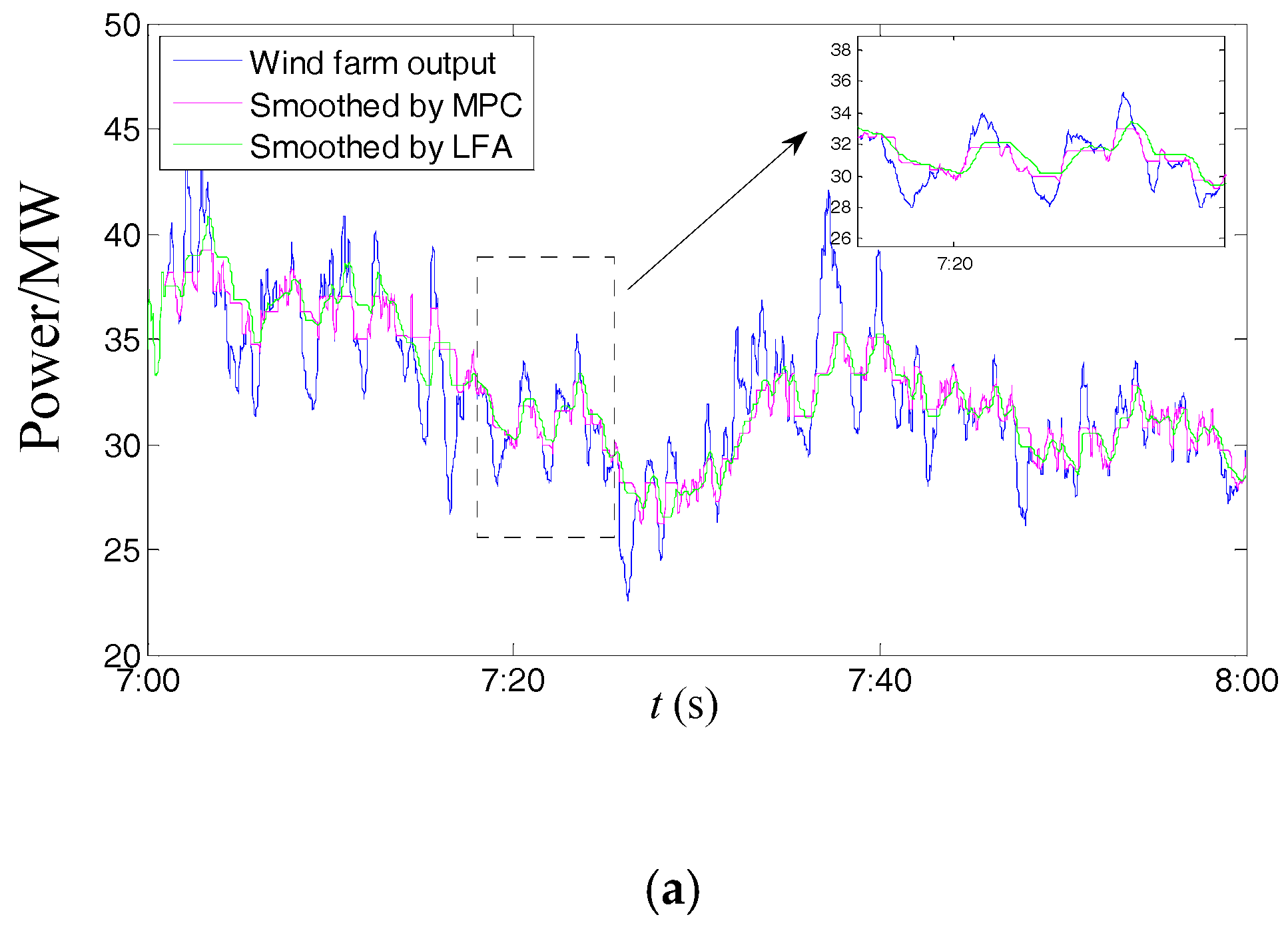
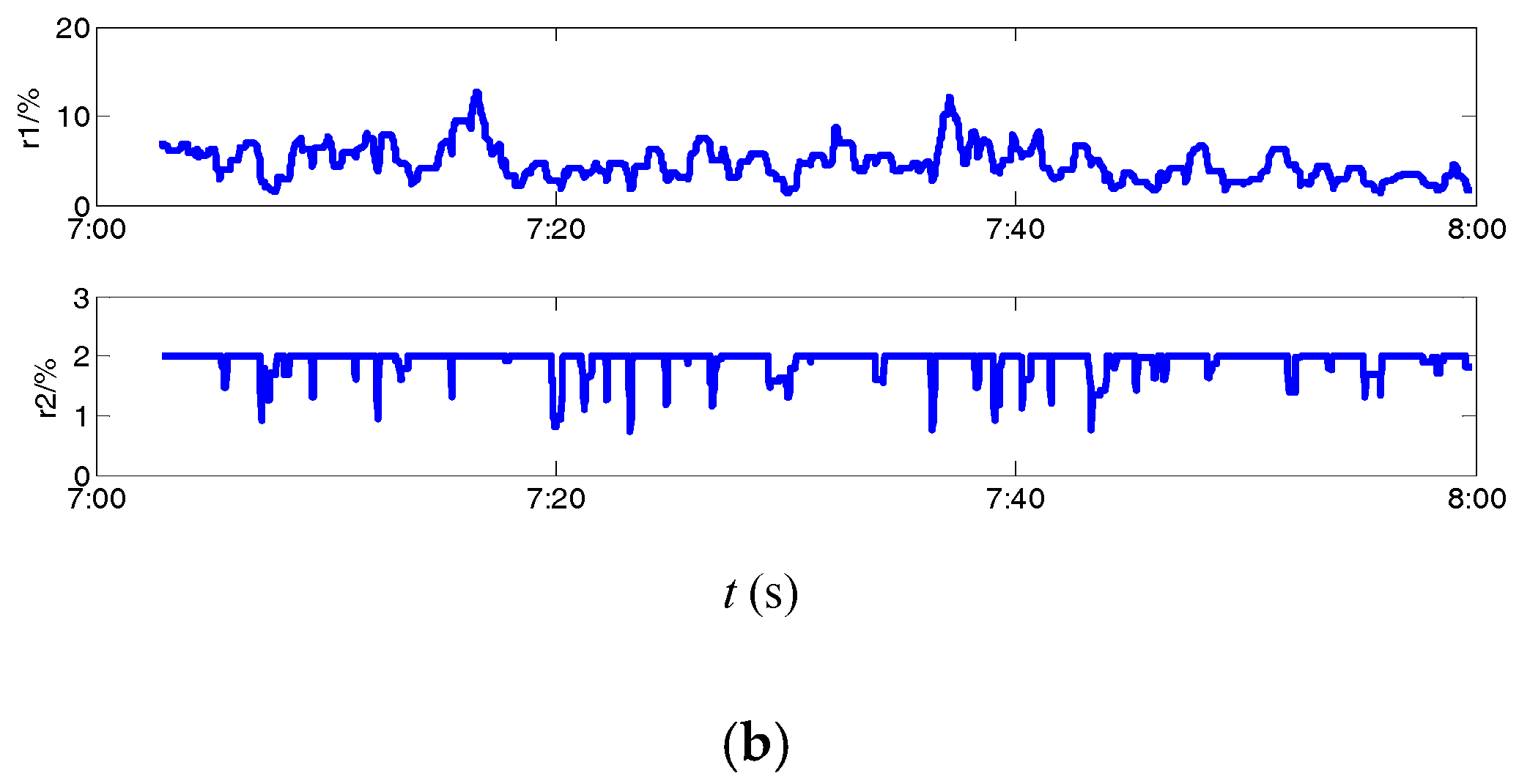
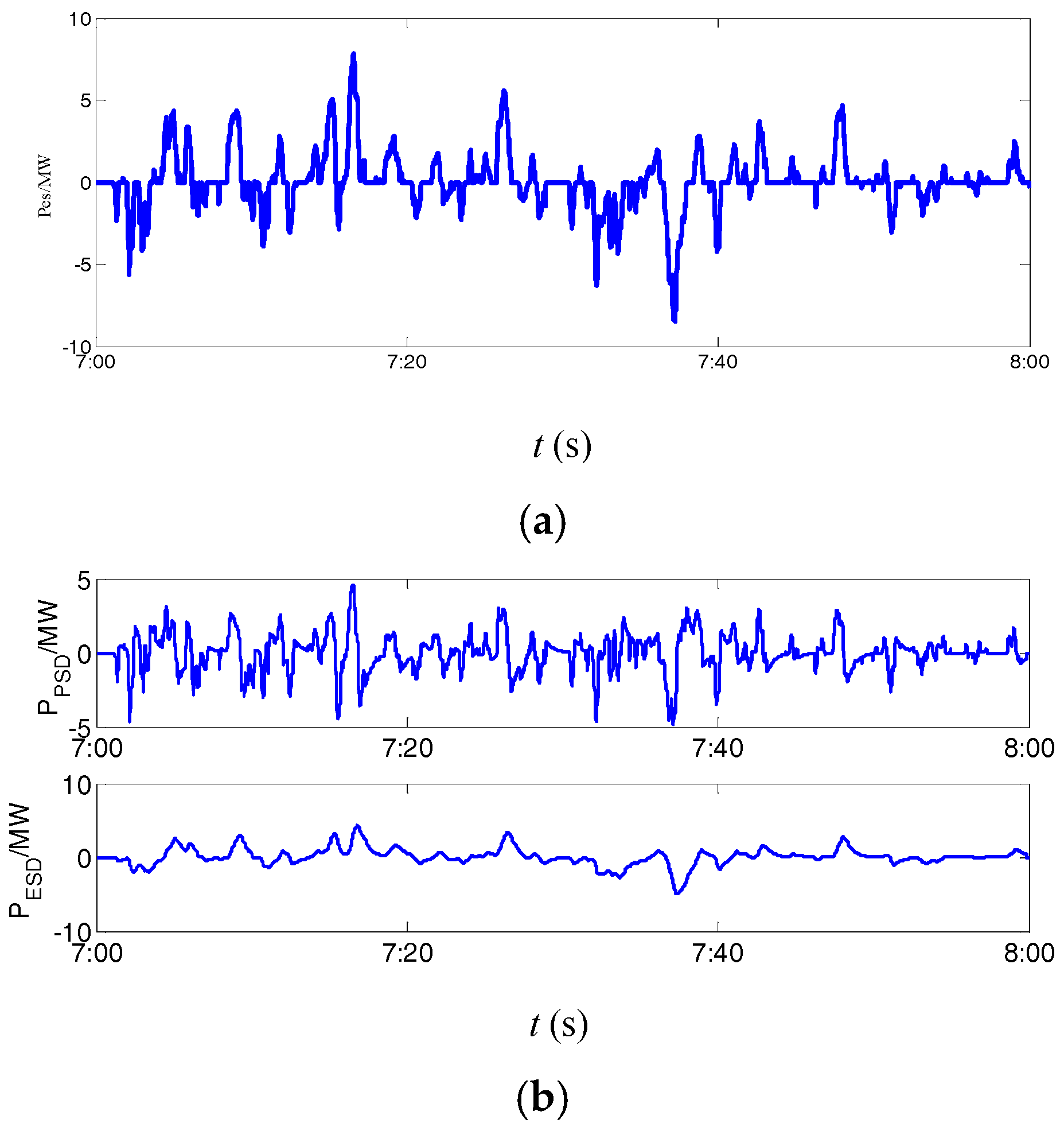
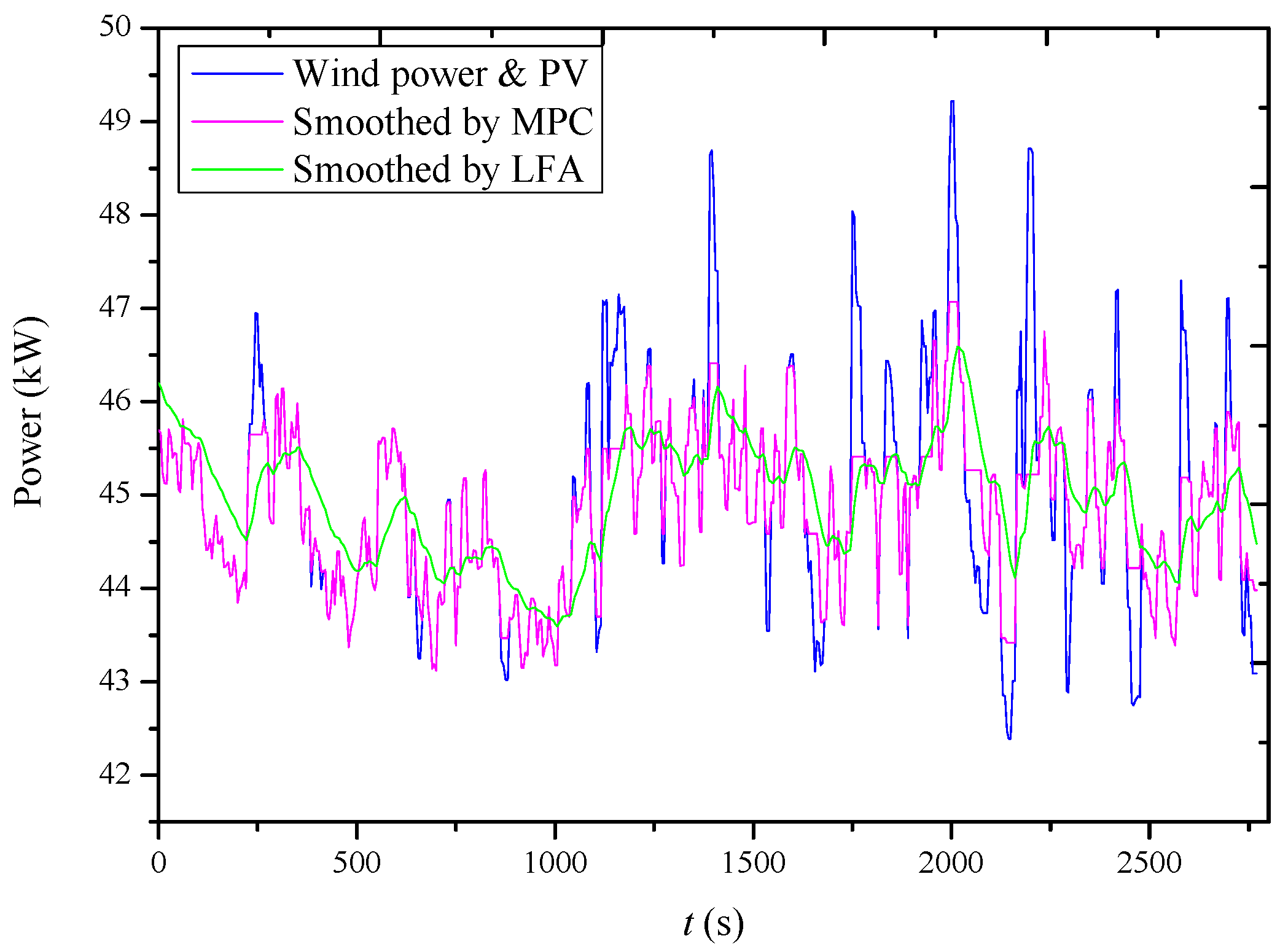
4. Simulation and Experiment Results
5. Discussion
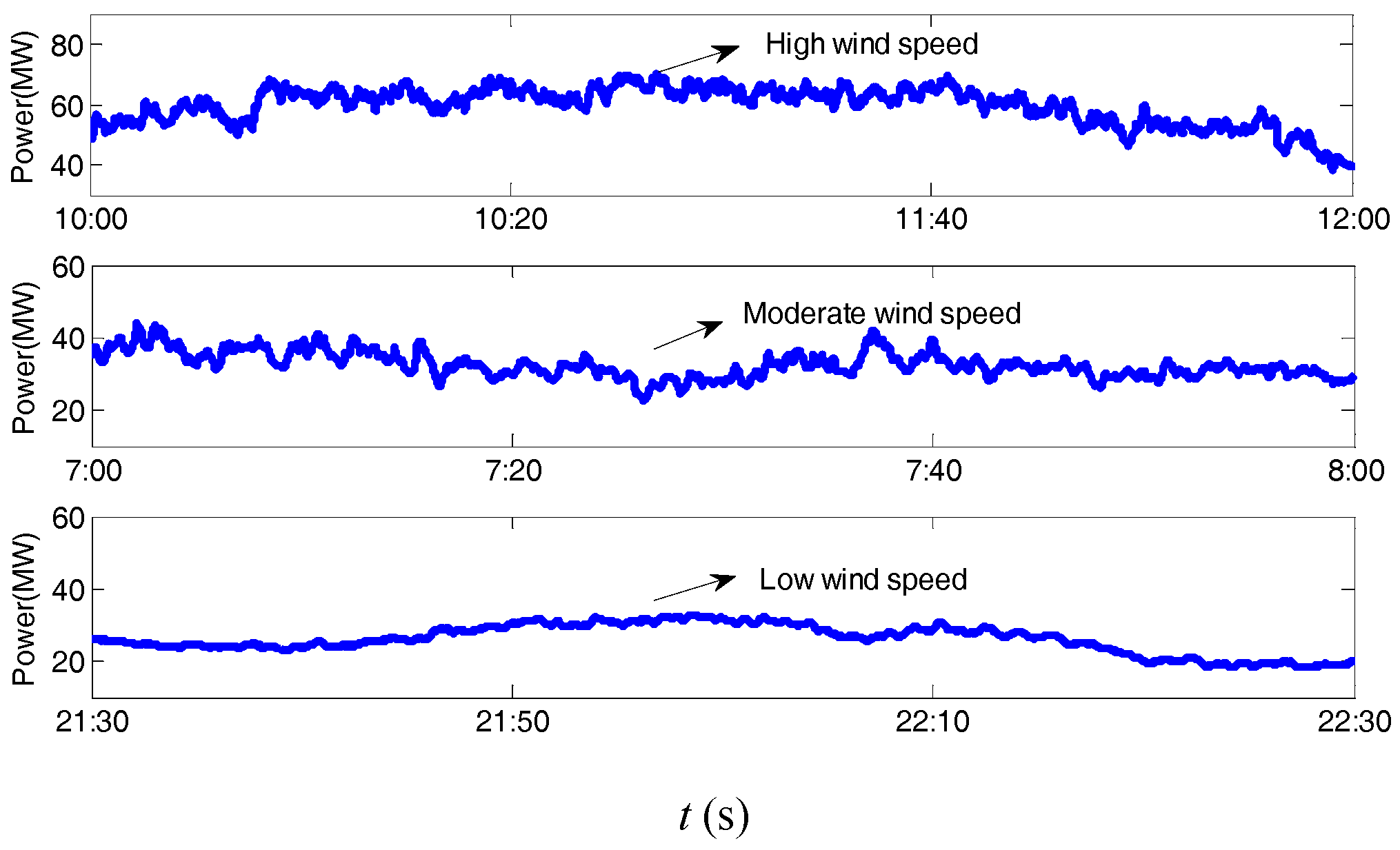
5.1. Different Wind Speed Level
5.2. Different LFA Cut-off Frequency
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lotfi, B.; Najiba, B.M.; el Euch, M. Impact of wind power integration on operating reserves. In Proceedings of the 16th IEEE Electrotechnical Conference (MELECON), Yasmine Hammamet, Tunisia, 25–28 March 2012; pp. 67–71. [Google Scholar]
- Guo, H.; Rudion, K.; Styczynski, Z.A. Integration of large offshore wind farms into the power system. In Proceedings of the 2011 EPU-CRIS International Conference on Science and Technology, Hanoi, Vietnam, 16 November 2011; pp. 1–6. [Google Scholar]
- Chávez, H.; Baldick, R.; Sharma, S. Governor rate-constrained OPF for primary frequency control adequacy. IEEE Trans. Power Syst. 2014, 29, 1473–1480. [Google Scholar] [CrossRef]
- Jiang, Q.; Hong, H. Wavelet-based capacity configuration and coordinated control of hybrid energy storage system for smoothing out wind power fluctuations. IEEE Trans. Power Syst. 2013, 28, 1363–1372. [Google Scholar] [CrossRef]
- Lee, H.; Shin, B.Y.; Han, S.; Jung, S.; Park, B.; Jang, G. Compensation for the power fluctuation of the large scale wind farm using hybrid energy storage applications. IEEE Trans. Appl. Supercond. 2011, 22. [Google Scholar] [CrossRef]
- Li, X.; Hui, D.; Lai, X. Battery energy storage station (BESS)-based smoothing control of Photovoltaic (PV) and wind power generation fluctuations. IEEE Trans. Sustain. Energy 2013, 4, 464–473. [Google Scholar] [CrossRef]
- Miao, F.; Tang, X.; Qi, Z. Fluctuation feature extraction of wind power. In Proceedings of the PES Innovative Smart Grid Technologies (ISGT), Tianjin, China, 21–24 May 2012; pp. 1–5. [Google Scholar]
- Barton, J.P.; Infield, D.G. Energy storage and its use with intermittent renewable energy. IEEE Trans. Energy Convers. 2004, 19, 441–448. [Google Scholar] [CrossRef]
- Li, W.; Joós, G.; Bélanger, J. Real-time simulation of a wind turbine generator coupled with a battery supercapacitor energy storage system. IEEE Trans. Ind. Electron. 2010, 57, 1137–1145. [Google Scholar] [CrossRef]
- Gee, A.M.; Dunn, R.W. Novel battery supercapacitor hybrid energy storage control strategy for battery life extension in isolated wind energy conversion systems. In Proceedings of the 45th International Universities Power Engineering Conference (UPEC), Wales, UK, 31 August–3 September 2010; pp. 1–6. [Google Scholar]
- Gonzalez, F.D.; Bianchi, F.D.; Sumper, A. Control of a flywheel energy storage system for power smoothing in wind power plants. IEEE Trans. Energy Convers. 2014, 29, 204–214. [Google Scholar]
- Wu, G.; Yoshida, Y.; Minakawa, T. Mitigation of wind power fluctuation by combined use of energy storages with different response characteristics. Energy Procedia 2011, 12, 975–985. [Google Scholar] [CrossRef]
- Tankari, M.A.; Camara, M.B.; Dakyo, B.; Nichita, C. Attenuation of power fluctuations in wind diesel hybrid system—Using ultracapacitors and batteries. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Incheon, Korea, 25 October 2010; pp. 1–6. [Google Scholar]
- Jia, H.; Fu, Y.; Zhang, Y.; He, W. Design of hybrid energy storage control system for wind farms based on flow battery and electric double-layer capacitor. In Proceedings of the APPEEC, Chengdu, China, 28–31 March 2010; pp. 1–6. [Google Scholar]
- Ding, M.; Lin, G.; Chen, Z. A control strategy for hybrid energy storage systems. Proc. CSEE 2012, 32, 1–7. [Google Scholar]
- Zhang, G.; Tang, X.; Qi, Z. Design of a hybrid energy storage system on leveling off fluctuation power outputs of intermittent sources. Autom. Electron. Power Syst. 2011, 35, 24–28. [Google Scholar]
- Senjyu, T.; Kikunaga, Y.; Yona, A.; Sekine, H.; Saber, A.Y.; Funabashi, T. Coordinate control of wind turbine and battery in wind power generator system. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]
- Goodwin, G.C.; Graebe, S.F.; Salgado, M.E. Control System Design; Valparaıso, P., Ed.; McGraw-Hill: New York, NY, USA, 2000. [Google Scholar]
- Mayhorn, E.; Kalsi, K.; Lian, J.; Elizondo, M. Model predictive control-based optimal coordination of distributed energy resources. In Proceedings of the 2013 46th Hawaii International Conference on System Sciences, Maui, HI, USA, 7–10 January 2013; pp. 2237–2244. [Google Scholar]
- Borhan, H.A.; Vahidi, A. Model predictive control of a power-split Hybrid Electric Vehicle with combined battery and ultracapacitor energy storage. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 5031–5036. [Google Scholar]
- Galus, M.D.; La, F.R.; Andersson, G. Investigating PHEV wind balancing capabilities using heuristics and model predictive control. In Proceedings of the IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- MPC Lab. Courses of Model Predictive Control Lab @ UC-Berkeley. Available online: http://www.mpc.berkeley.edu/mpc-course-material (accessed on 3 November 2013).
- Maciejowski, J.M. Predictive Control with Constraints; Pearson Education: Harlow, UK, 2001. [Google Scholar]
- Shen, Y. Design approaches research and application of control system with input and output constraints. Ph.D. Thesis, Shandong University, Jinan, China, May 2009. [Google Scholar]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB; Springer-Verlag: London, UK, 2009. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Advantages | Disadvantages |
|---|---|---|
| LFA with fixed time constant | Simple, reliable, easy to engineering | time constant cannot be adjusted; easy to cause wind power to be overly mitigated, increase energy storage cost; control delay |
| LFA with variable time constant | Simple, reliable, easy to engineering | control delay, not good for on-line control |
| Wavelet | easy to implement frequency decomposition | its difficulty lies in the selection of wavelet functions and a large amount of historical data on wind power needed |
| MPC | good forecast ability, control time delay can be omitted, suitable for online optimizing control | - |
| Control Method | LFA | MPC | Saved (%) |
|---|---|---|---|
| Power (MW) | 8.8234 | 8.4635 | 4.1 |
| Energy (MWh) | 0.3545 | 0.2713 | 23.5 |
| Control Method | LFA | MPC | Saved (%) |
|---|---|---|---|
| Power (MW) | 3.6733 | 3.4900 | 4.99% |
| Energy (MWh) | 0.0679 | 0.0577 | 15.02% |
| Control Method | LFA | MPC | Saved (%) | |
|---|---|---|---|---|
| Data 1 | Power (MW) | 7.3019 | 6.4766 | 11.30 |
| Energy (MWh) | 0.4186 | 0.1702 | 59.34 | |
| Data 2 | Power (MW) | 11.2379 | 9.3792 | 16.54 |
| Energy (MWh) | 5.3335 | 3.6248 | 32.04 | |
| Data 3 | Power (MW) | 8.1564 | 4.7816 | 41.38 |
| Energy (MWh) | 2.0428 | 0.9924 | 51.42 | |
| Data 4 | Power (MW) | 14.3251 | 12.5434 | 12.44 |
| Energy (MWh) | 2.3051 | 1.3641 | 40.82 | |
| Data 5 | Power (MW) | 18.0159 | 17.2462 | 4.27 |
| Energy (MWh) | 3.7106 | 3.4895 | 5.95 | |
| Wind Speed | (%) | (%) | fc (Hz) | PSC,max (MW) | ESC,max (MWh) | PLB,max (MW) | ELB,max (MWh) | |
|---|---|---|---|---|---|---|---|---|
| High | 16.35 | 2 | 0.001 | 159.24 | 9.8208 | 0.3155 | 3.8737 | 0.6347 |
| 16.35 | 2 | 0.01 | 15.92 | 6.127 | 0.0751 | 9.2046 | 0.587 | |
| 16.35 | 2 | 0.05 | 3.18 | 4.554 | 0.0179 | 10.7229 | 0.6122 | |
| 16.35 | 2 | 0.1 | 1.59 | 3.607 | 0.0092 | 11.0319 | 0.6153 | |
| Moderate | 12.72 | 2 | 0.001 | 159.24 | 7.0857 | 0.1676 | 1.9984 | 0.2237 |
| 12.72 | 2 | 0.01 | 15.92 | 4.1727 | 0.0529 | 6.5714 | 0.2681 | |
| 12.72 | 2 | 0.05 | 3.18 | 2.1546 | 0.0139 | 8.2512 | 0.2712 | |
| 12.72 | 2 | 0.1 | 1.59 | 1.3293 | 0.0071 | 8.3964 | 0.2713 | |
| Low | 3.41 | 2 | 0.001 | 159.24 | 1.3895 | 0.0151 | 0.1949 | 0.0167 |
| 3.41 | 2 | 0.01 | 15.92 | 1.0772 | 0.006 | 0.7792 | 0.0192 | |
| 3.41 | 2 | 0.05 | 3.18 | 0.6082 | 1.80 × 10−3 | 1.2009 | 0.0192 | |
| 3.41 | 2 | 0.1 | 1.59 | 0.4178 | 9.80 × 10−4 | 1.268 | 0.0192 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Sun, Y.; Zhou, G.; Miao, F. Coordinated Control of Multi-Type Energy Storage for Wind Power Fluctuation Suppression. Energies 2017, 10, 1212. https://doi.org/10.3390/en10081212
Tang X, Sun Y, Zhou G, Miao F. Coordinated Control of Multi-Type Energy Storage for Wind Power Fluctuation Suppression. Energies. 2017; 10(8):1212. https://doi.org/10.3390/en10081212
Chicago/Turabian StyleTang, Xisheng, Yushu Sun, Guopeng Zhou, and Fufeng Miao. 2017. "Coordinated Control of Multi-Type Energy Storage for Wind Power Fluctuation Suppression" Energies 10, no. 8: 1212. https://doi.org/10.3390/en10081212
APA StyleTang, X., Sun, Y., Zhou, G., & Miao, F. (2017). Coordinated Control of Multi-Type Energy Storage for Wind Power Fluctuation Suppression. Energies, 10(8), 1212. https://doi.org/10.3390/en10081212