4.1 The Test Bench
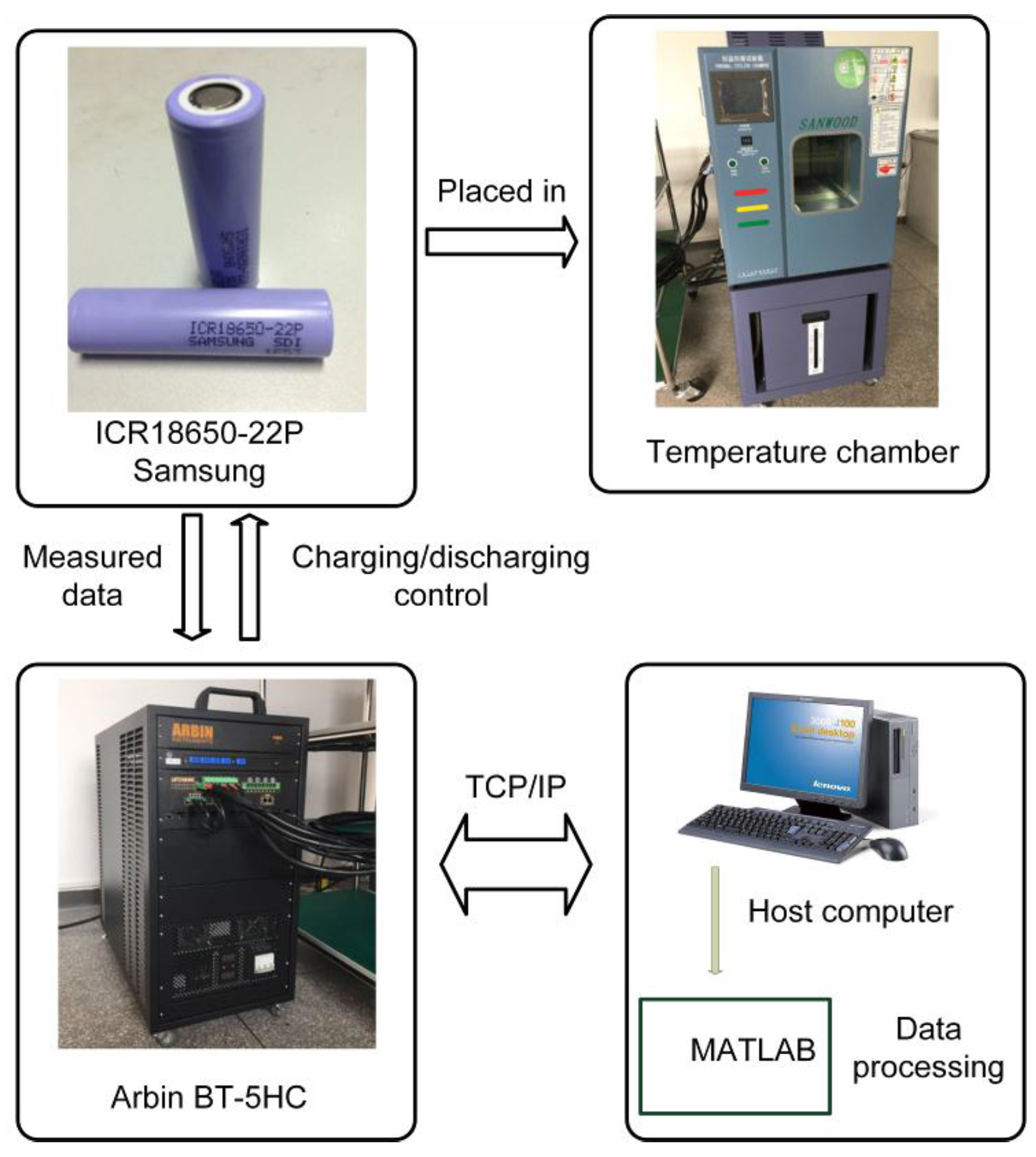
The schematic diagram of the test bench is shown in
Figure 7. It consists of battery testing equipment (Arbin BT-5HC, Arbin Instruments, College Station, TX, USA), temperature chamber (Sanwood SC-80-CC-2, Sanwood, Dongguan, China), a lithium-ion battery (ICR18650-22P, Samsung SDI, Shenzhen, China), and a personal computer (PC) with Arbin’ Mits Pro Software (v7.0), used for battery charging/discharging control and recording data. Detials about the tested battery include: nominal capacity 2200 mAh, nominal voltage 3.6 V, charging end voltage 4.2 V, discharging end voltage 2.75 V, and maximum continuous discharging current 10 A. The voltage and current measurement errors of the battery testing equipment are less than 0.02% full scale range (FSR). The study was implemented under controlled temperatures. Except
Section 4.5, all the other experiments mentioned in this paper were implemented under 25 °C. During battery test operation, a one second measurement sampling time for voltage and current was used.
4.2. Federal Urban Driving Schedule (FUDS) Test
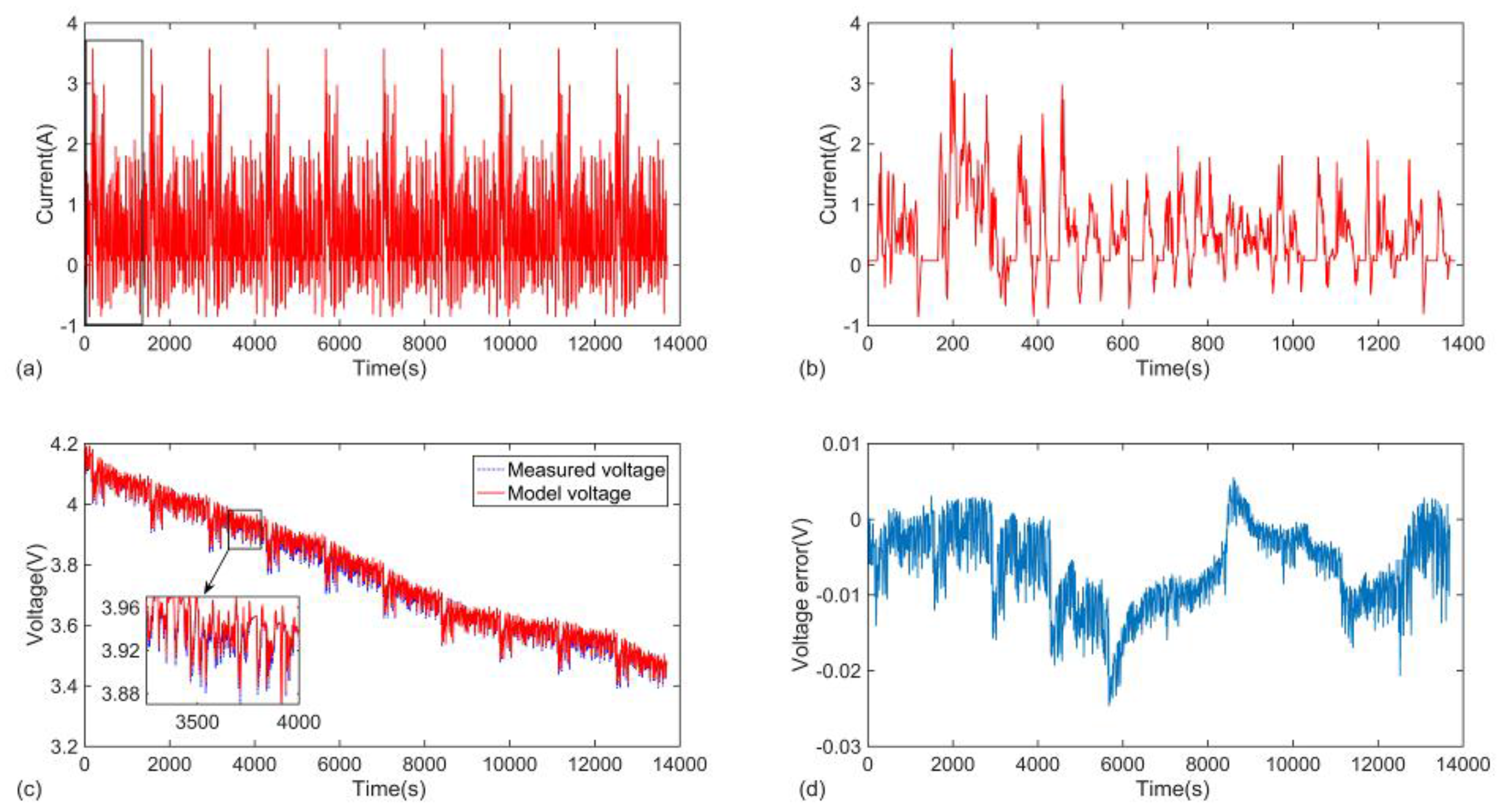
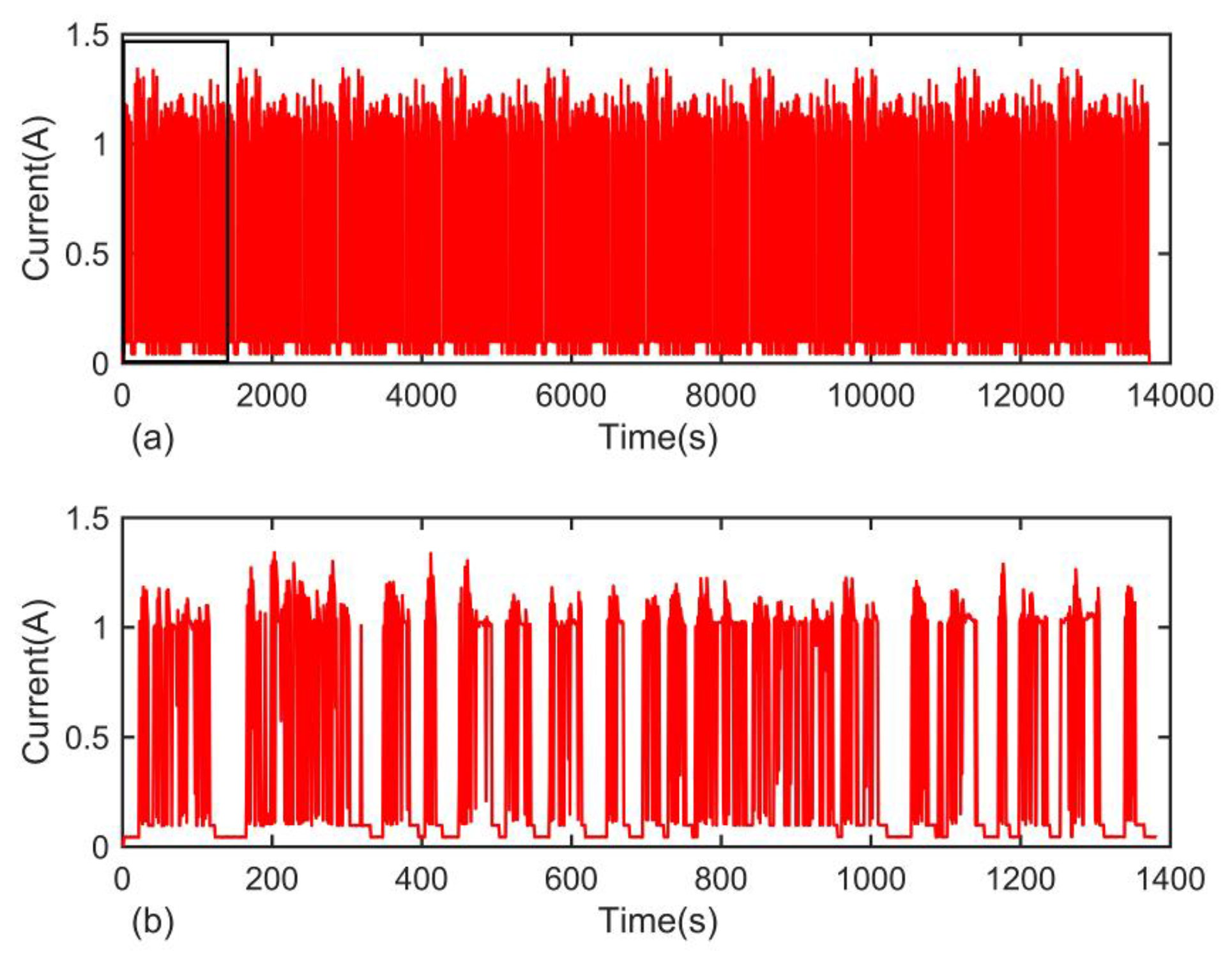
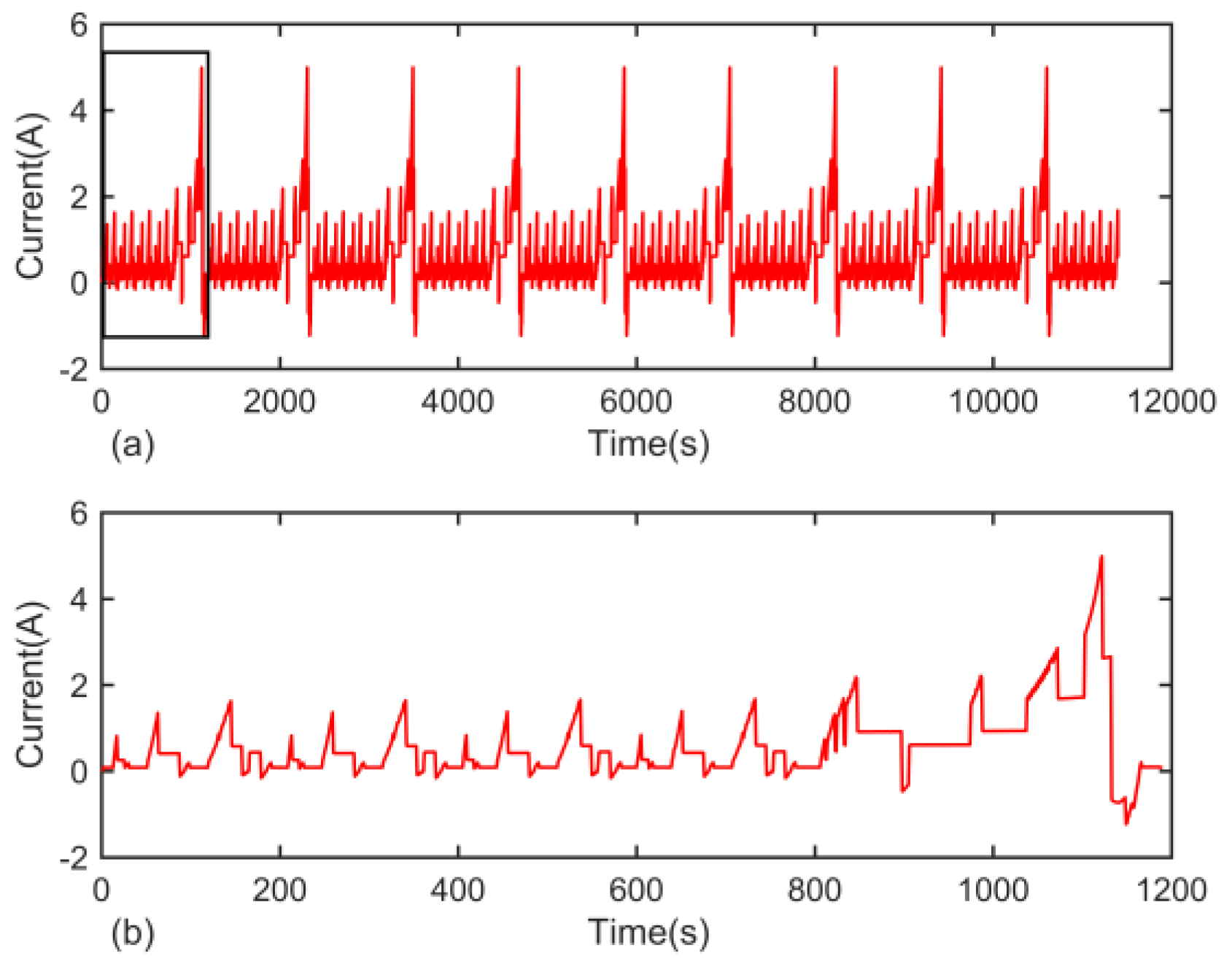
To evaluate the performance of the proposed SOC estimation algorithm, the Federal Urban Driving Schedule (FUDS) test was implemented to simulate a typical loading condition. The current profile of the FUDS test is showed in
Figure 8, in which the positive values represent the discharging process and the negative values represent the charging process.
Figure 8a displays the complete current vs. time during the FUDS condition, and
Figure 8b displays a zoomed part of
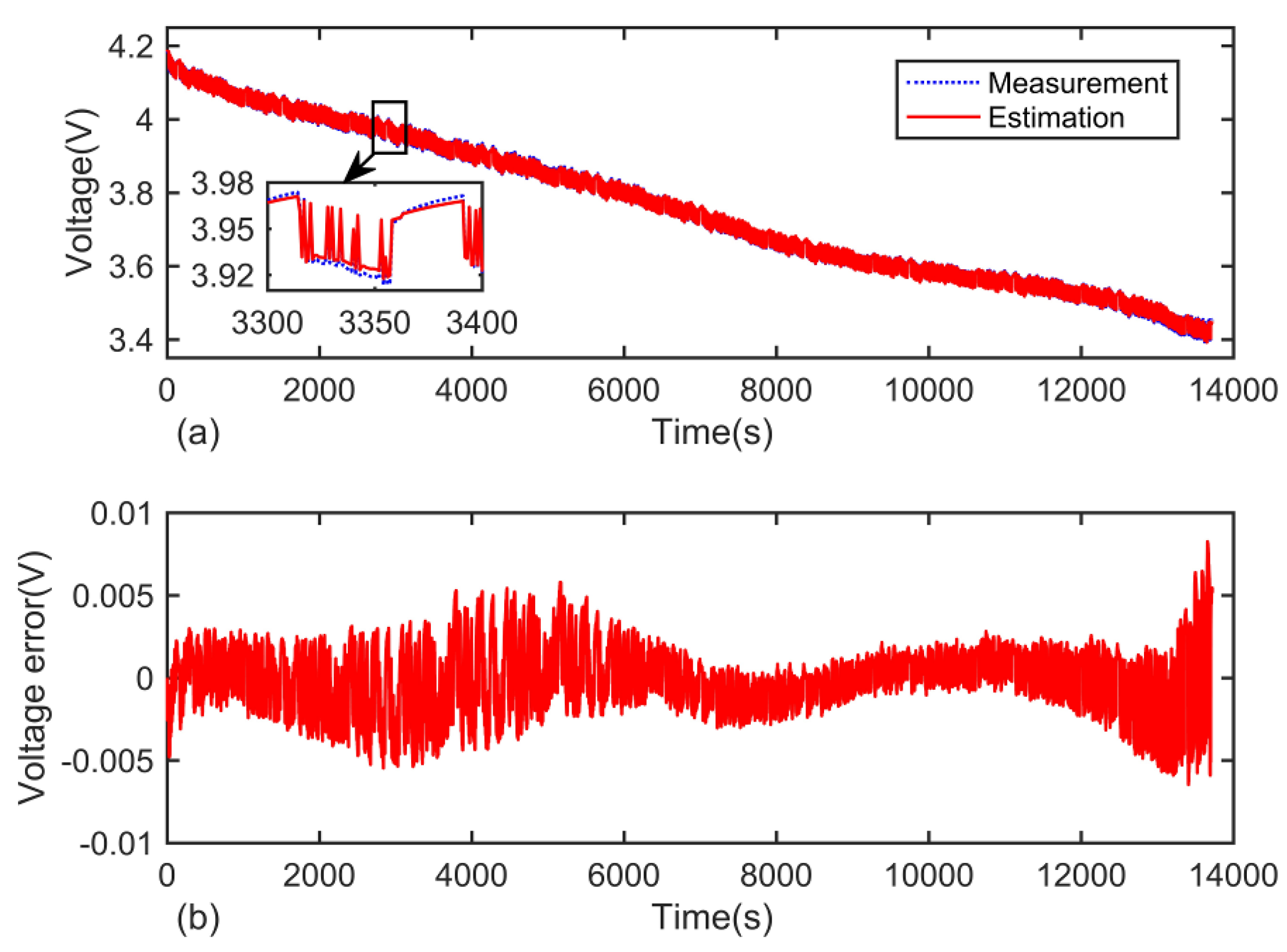
Figure 8a, as indicated. The measured voltage and estimated voltage under the FUDS test are shown in
Figure 9a, and the corresponding voltage estimation error is shown in
Figure 9b. In
Figure 9a, the blue dotted line is the reference voltage measured with a high precision sensor, and the red solid line is the voltage estimated with the proposed observer. It is obvious that the measured voltage fluctuates greatly due to the sharply changing current, but the estimated voltage can track the measured voltage accurately with a maximum voltage error less than 0.01 V.
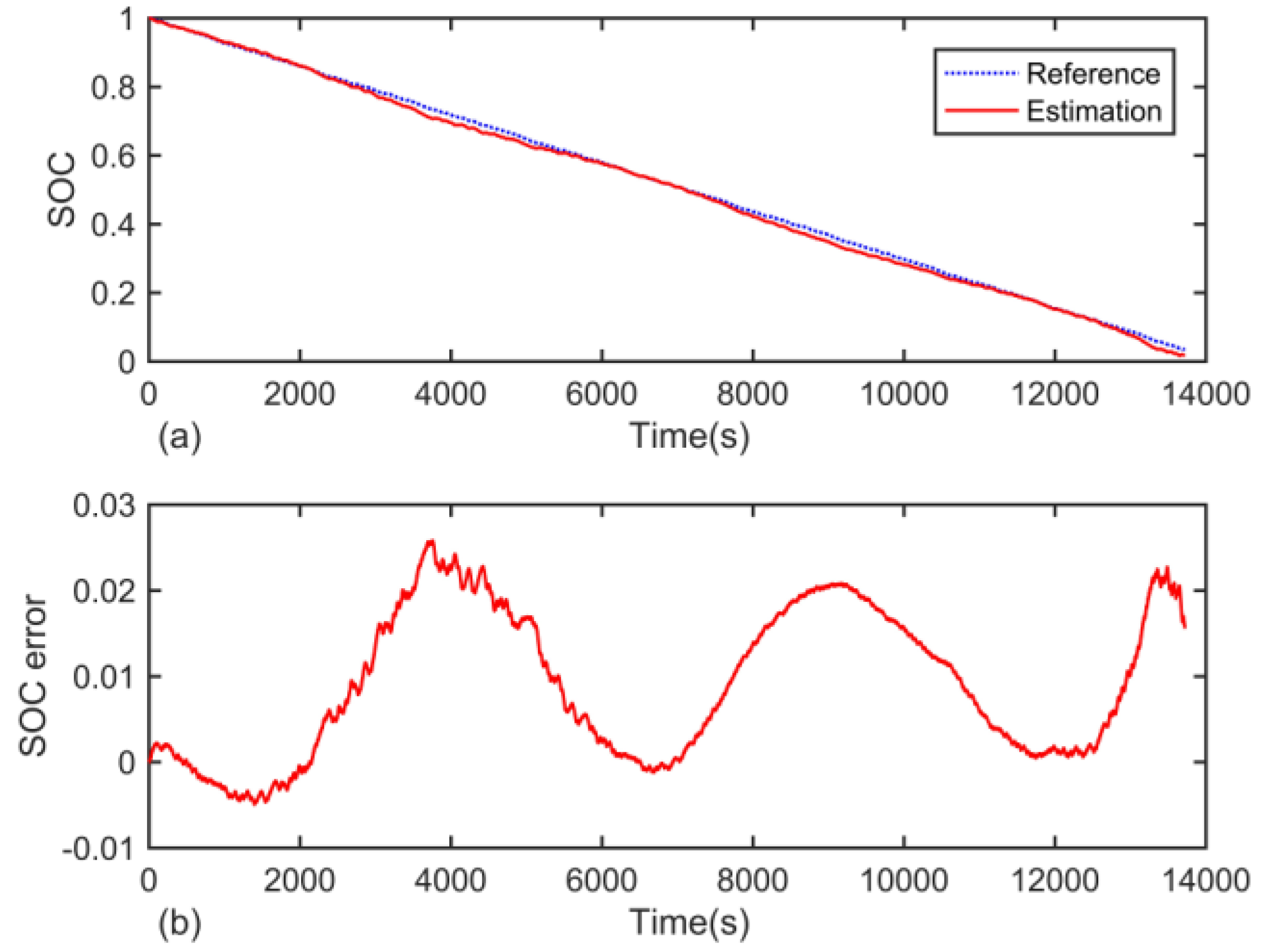
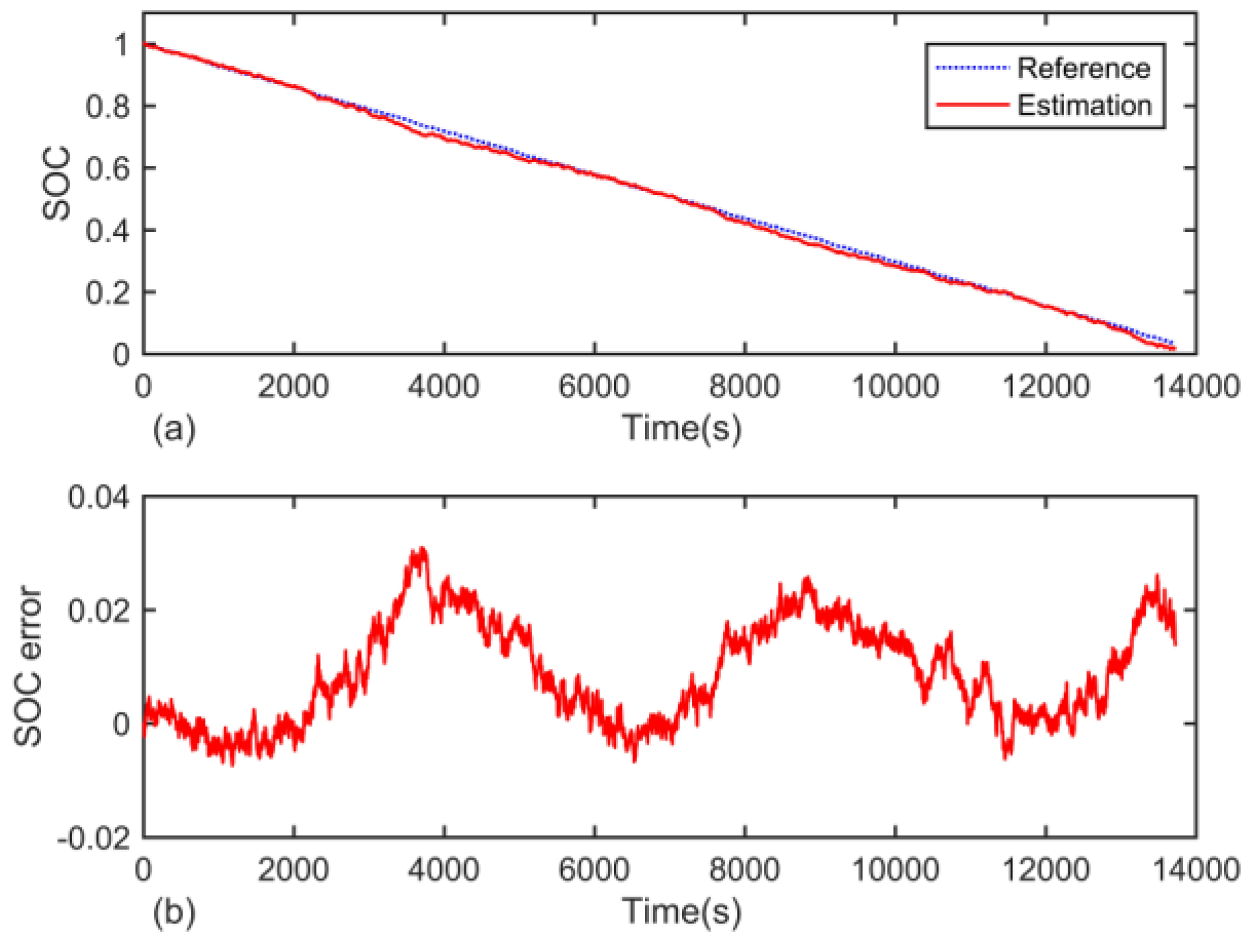
The SOC estimation results under the FUDS test are shown in
Figure 10a. The blue dotted line is the reference SOC obtained by the coulomb counting method with high precision sensors, and the red solid line is the estimated SOC.
Figure 10b shows the SOC estimation error. From
Figure 10b, we can see that the maximum error is lower than 3%. This indicates that the proposed method has good performance for voltage and SOC estimation accuracy.
4.3 Convergence Rate Test
As presented in
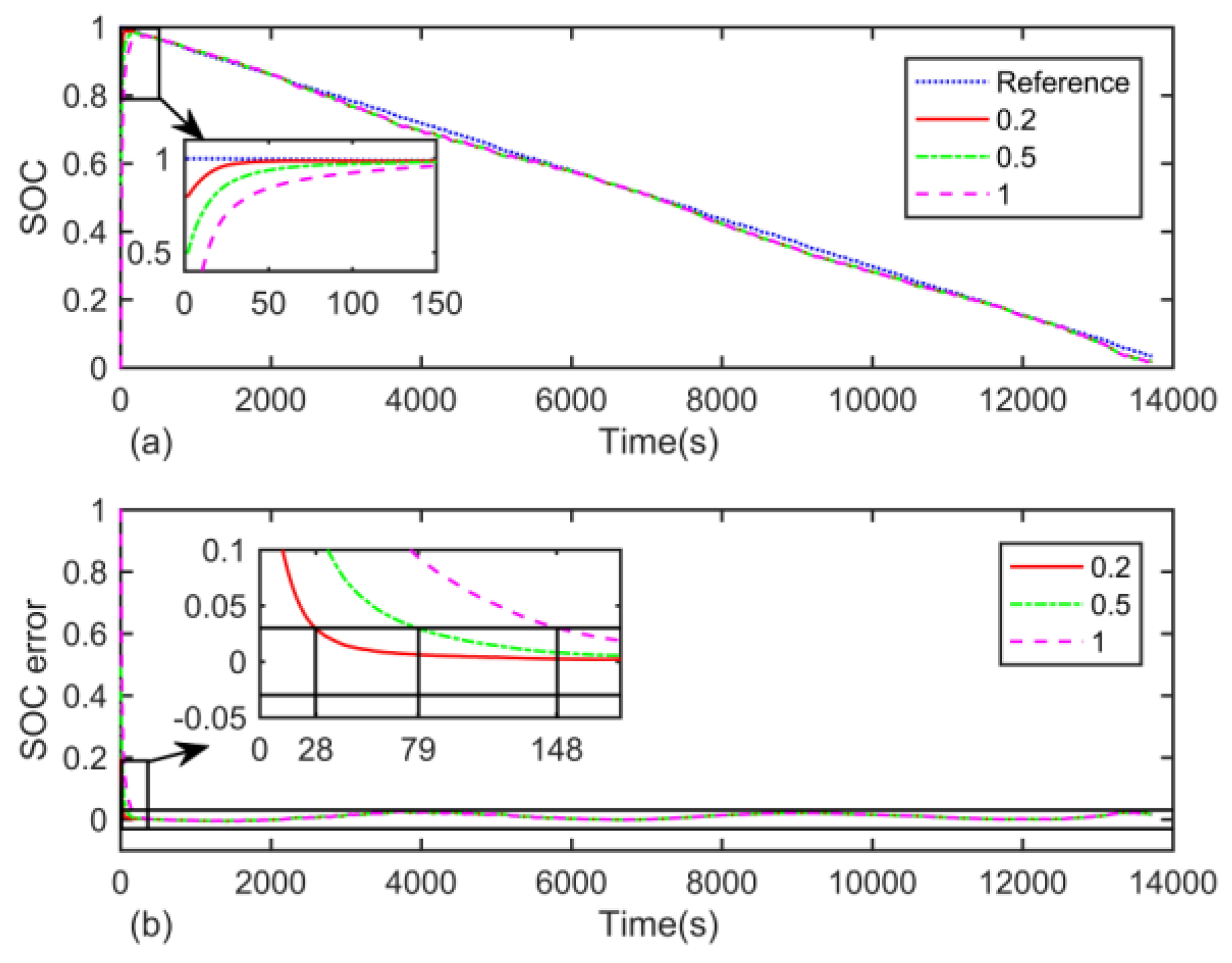
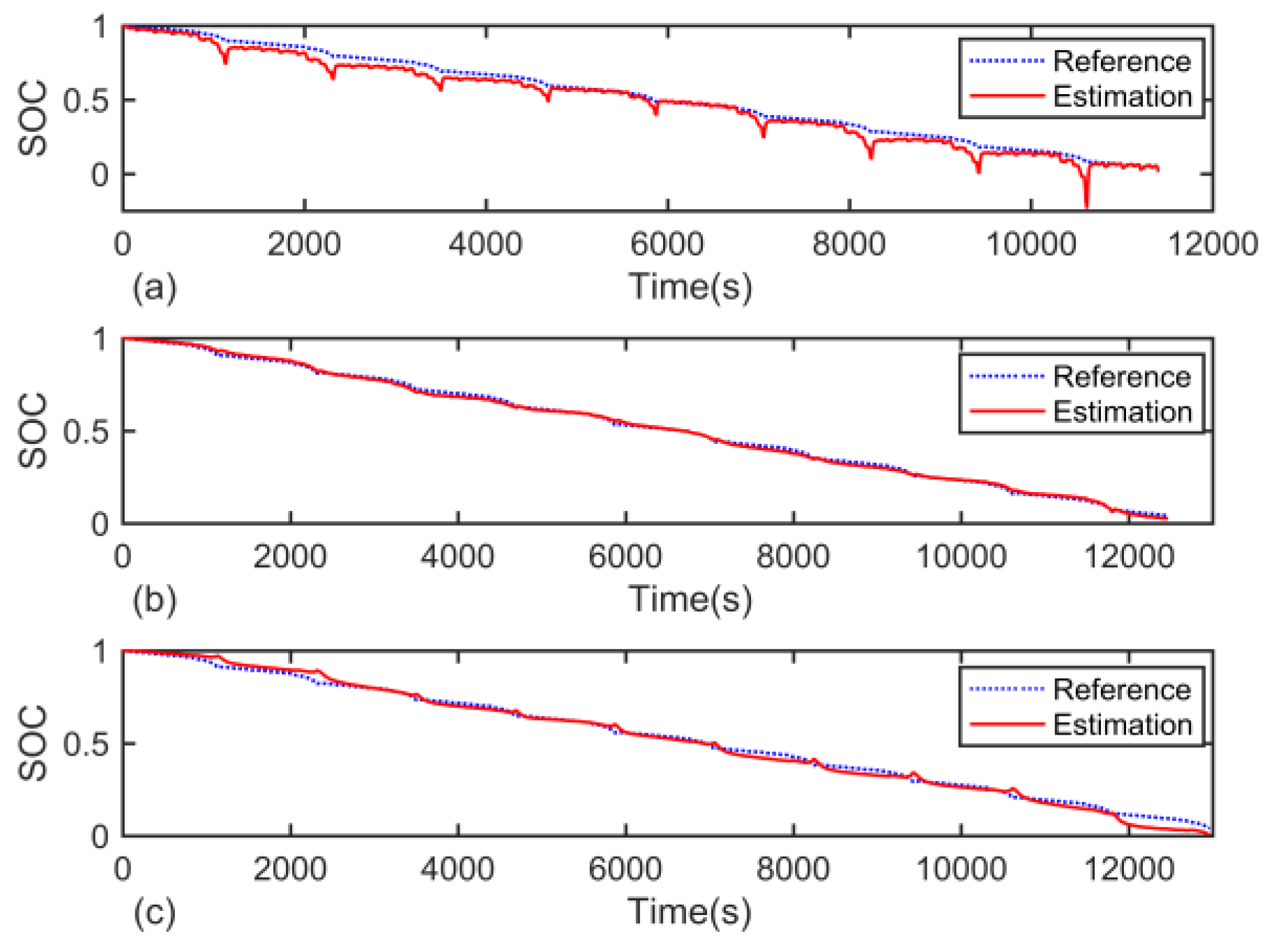
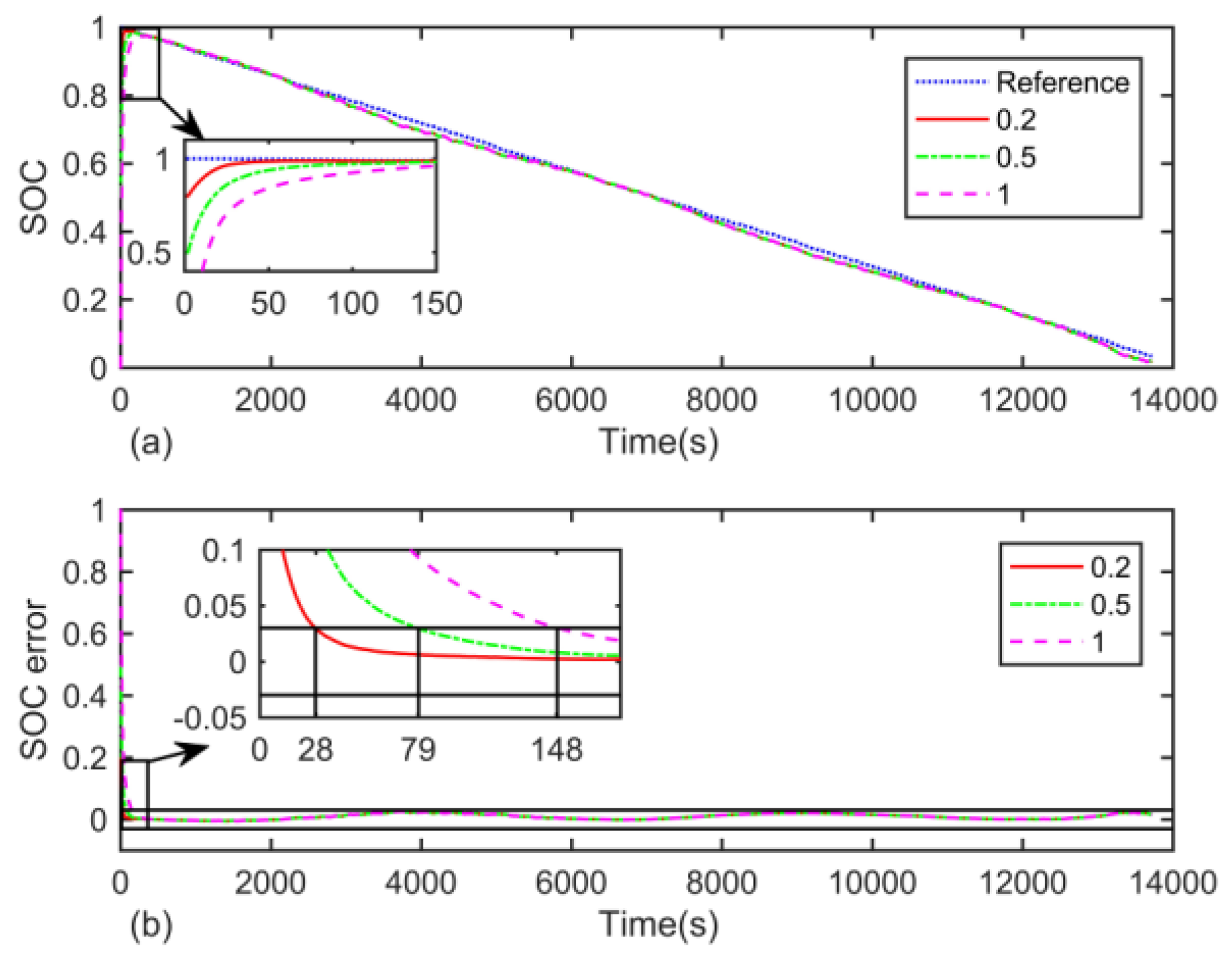
Section 4.2, we assume that the initial SOC value is equal to the true SOC value. However, in practice, the initial SOC value may not be accurate due to various factors, such as the self-discharge phenomenon and the capacity recovery effect. A good SOC estimation method should compensate for the effect caused by the initial SOC estimation error and converge to the true SOC value within a limited time. In this section, different initial SOC values were set to verify the performance of the proposed observer against the initial SOC estimation error. To be more specific, the initial SOC values are set as 0, 0.5, or 0.8 when the true SOC value is 1. The SOC estimation results are shown in
Figure 11a, in which the blue dotted line is the reference SOC. The red solid line, green dash-dotted line, and magenta dash line are the estimated SOCs with an initial SOC estimation error of 0.2, 0.5, and 1, corresponding to the initial SOC values of 0.8, 0.5, and 0, respectively.
Figure 11b displays the SOC estimation error. From
Figure 11, it is notable that the SOC error decreases dramatically in the first few seconds. The proposed observer has considerable convergence rate.
4.4. Robustness Against Current and Voltage Noises
In
Section 4.2 and
Section 4.3, we assume that the current and voltage values are accurate, which could be guaranteed under laboratory conditions. However, in practice, the measured current and voltage values are inevitably mixed with noises due to various factors, such as errors in sensor precision, or electromagnetic interference (EMI). Thus, it is important to evaluate the robustness of the proposed observer against measurement noise.
To evaluate the robustness of the proposed observer against the current noise, a sequence of stochastic normal distributed noises was attached to the measured current shown in
Figure 8. The mean value of the noise is zero and its standard deviation can be obtained from Equation (21).
In Equation (21),
σ is the standard deviation,
ω is a scale factor, and
Imax represents the maximum current value from the data shown in
Figure 8. We studied the conditions of
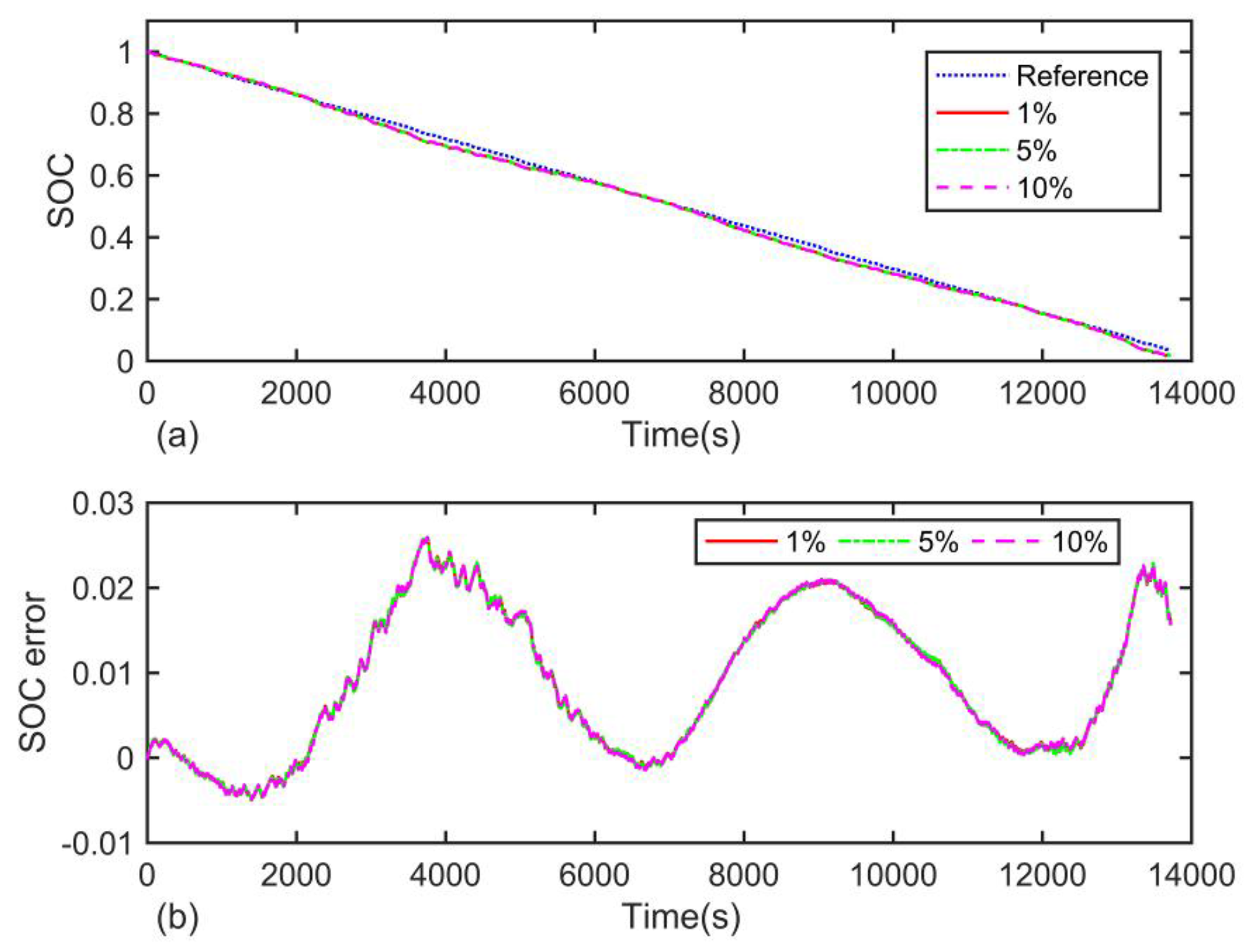
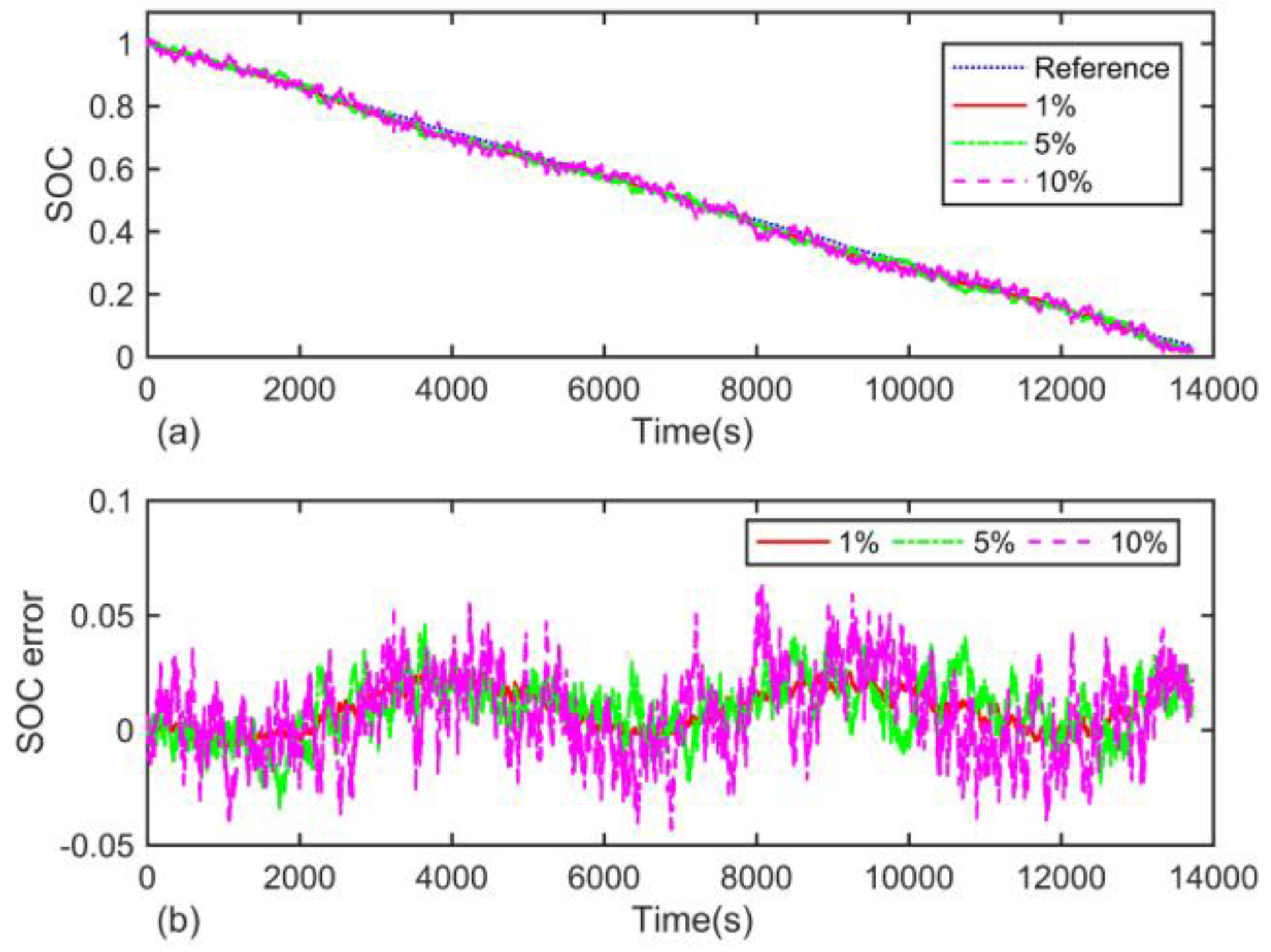
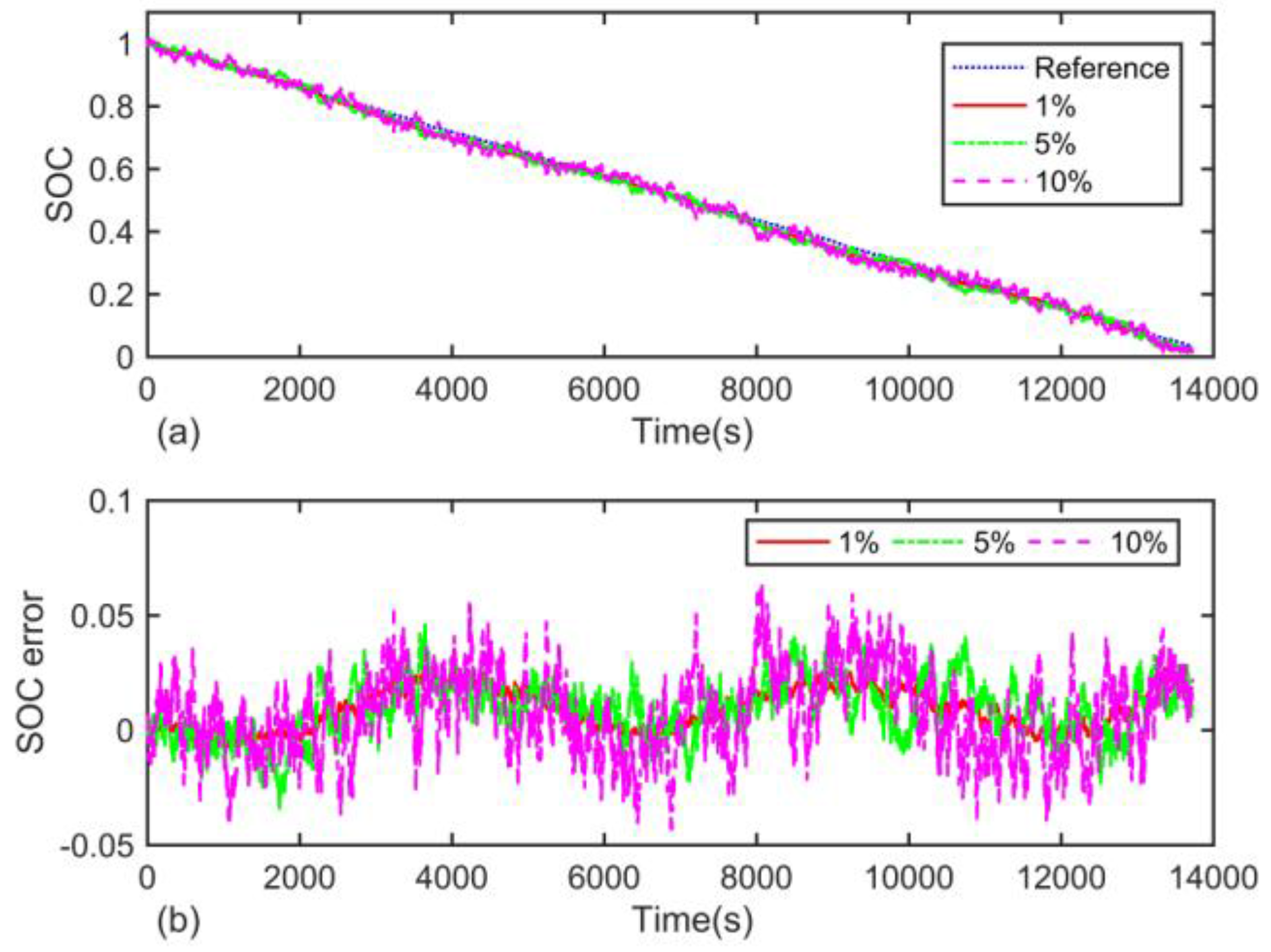
ω = 1%, 5%, and 10%. The SOC estimation results are shown in
Figure 12a,b displays the corresponding SOC estimation error.
In
Figure 12a, the blue dotted line is the reference SOC. The red solid line, green dash-dotted line, and magenta dash line represent the estimated SOC with 1%, 5%, and 10% current noises, respectively. To quantitatively study the robustness of the proposed observer, the mean absolute error (MAE) and maximum error were calculated, as listed in
Table 3. From
Figure 12 and
Table 3, we can see that although the SOC error fluctuates more intensely as the current noise increases, the mean absolute error and the maximum error of SOC estimation change only slightly.
In practical application, due to factors such as changing temperature and poor calibration, the current sensors may suffer from drift error. To further verify the robustness of the proposed observer against current noises, another test was conducted. Here, a combination of 5%
Imax current offset noise and Gaussian noise in the form of Equation (21) with
ω = 5% was attached to the current profile, shown in
Figure 8.
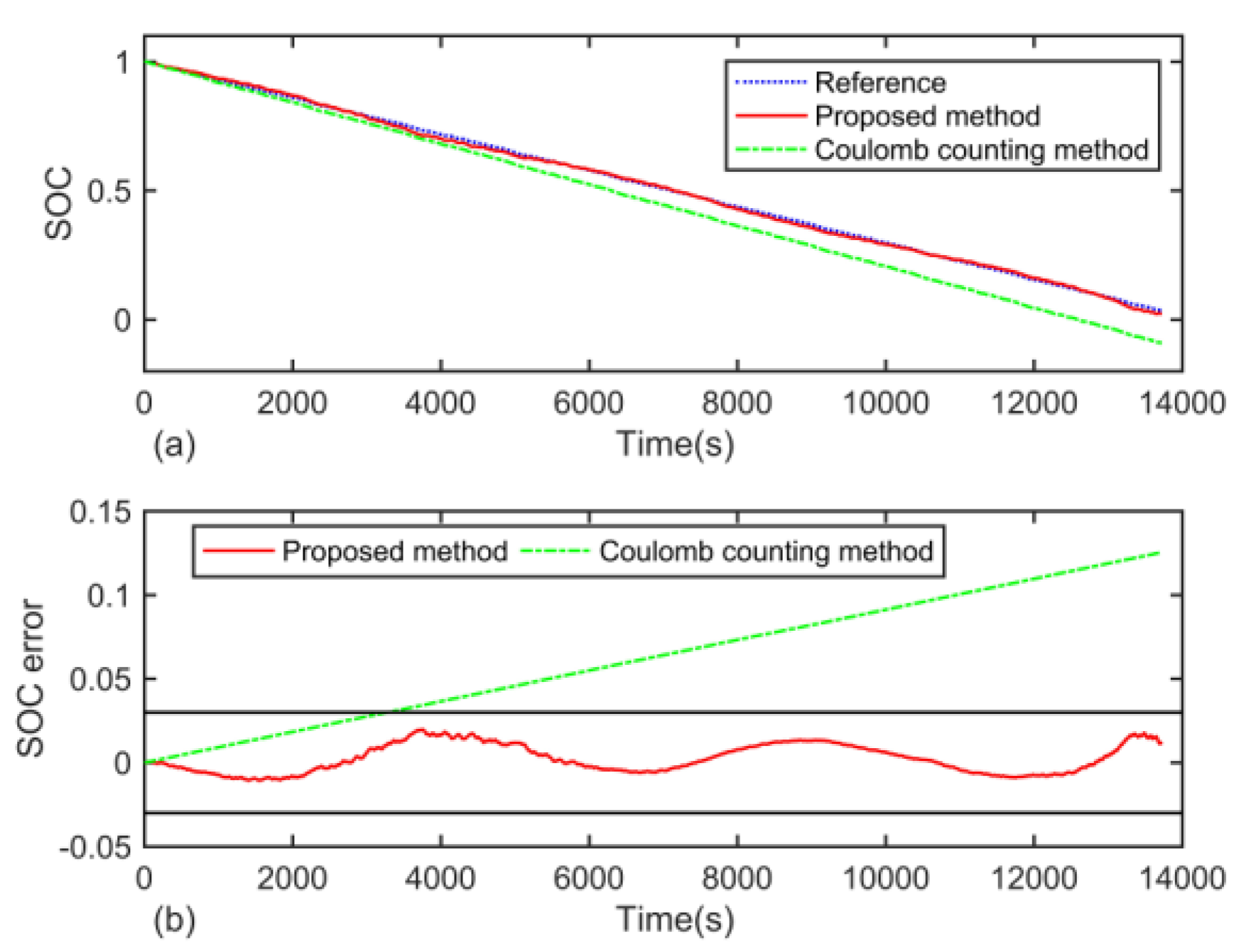
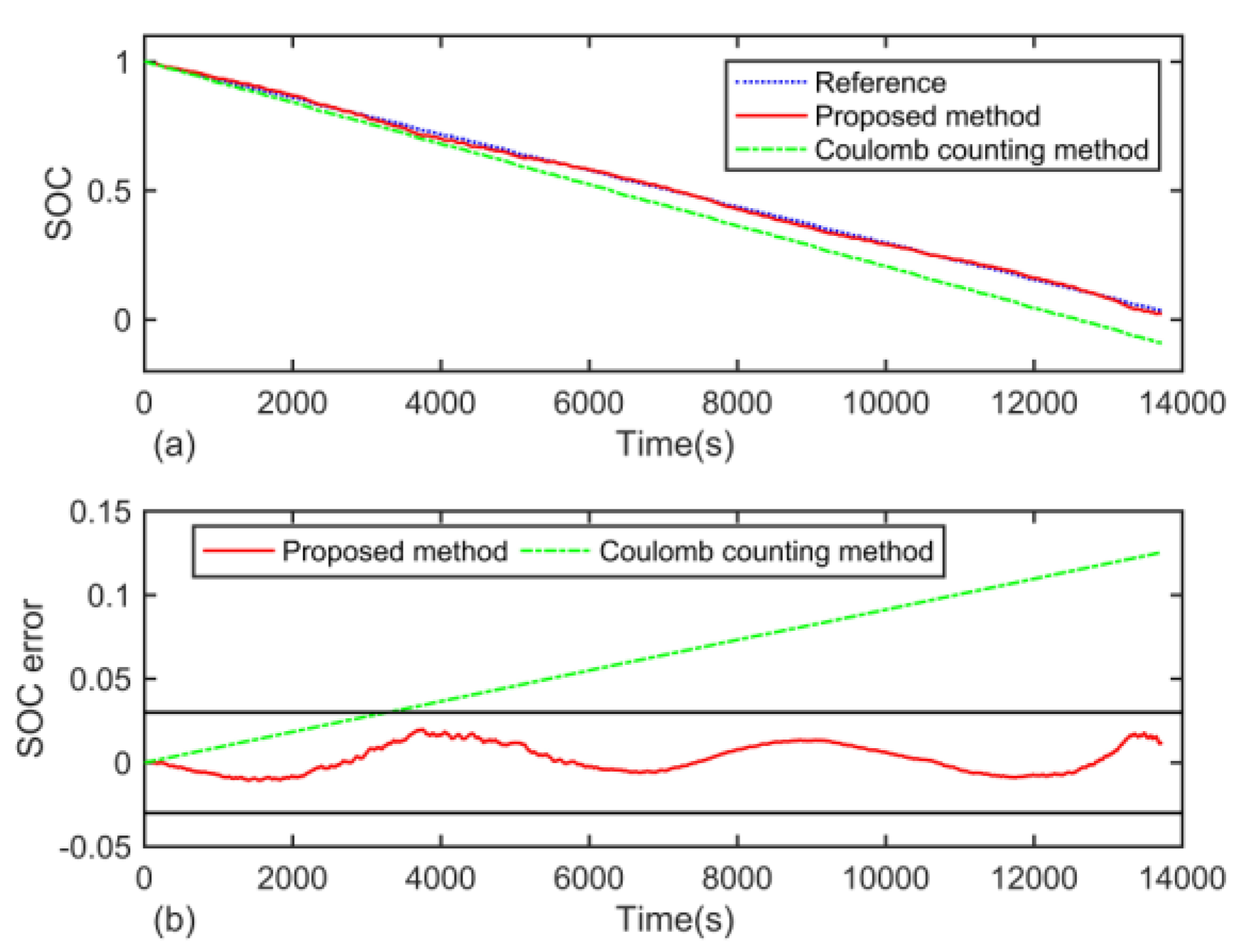
Figure 13a shows the SOC estimation result for comparison with the coulomb counting method and
Figure 13b displays the corresponding SOC estimation error.
In
Figure 13a, the blue dotted line is the reference SOC. The red solid line and green dash-dotted line are the ones calculated by the proposed observer and coulomb counting methods, respectively. In
Figure 13b, the black solid lines indicate the 3% SOC error boundary. From
Figure 13, we can see that when the current data is inaccurate, the coulomb counting method suffers accumulated error, which is consistent with available literature. In contrast, the proposed observer can well compensate for the current noise and maintain high estimation accuracy.
Similarly, the robustness of the proposed observer against voltage noise was studied. In this test, the voltage noise was assumed to obey a stochastic normal distribution. The mean of the voltage noise is zero, and the standard deviation can be obtained by Equation (22).
Where
σ is the standard deviation,
ω is a scale factor, and
Umax denotes the maximum measured voltage in the FUDS test described in
Section 4.2. In this paper, the conditions of
ω = 1%, 5%, and 10% were studied. The SOC estimation results shown in
Figure 14a,b display the corresponding SOC estimation error. In
Figure 14a, the blue dotted line represents the reference SOC. The red solid line, green dash-dotted line, and magenta dash line are the SOC estimation results for 1%, 5%, 10% voltage noise, respectively.
Table 4 lists the estimation errors.
As shown in
Figure 14a, the estimated SOC fluctuated greatly with the increase of voltage noise. This result is confirmed by
Figure 14b, as well as
Table 4. Considering that the proposed observer relies on the difference between the measured voltage and the estimated voltage to correct the estimated SOC value, it is of vital importance to obtain accurate voltage values.
Finally, to verify the performance of the proposed observer for an environment containing both current and voltage noise, another test was conducted. In this test, 5% current noise and 1% voltage noise were added to the current profile and voltage profile described in
Section 4.2. The estimation results are shown in
Figure 15a,b displays the SOC estimation error. In
Figure 15a, the blue dotted line is the reference SOC, and the red solid line represents the estimated SOC calculated by the proposed observer in the presence of both current and voltage noises.
Table 5 lists the estimation error.
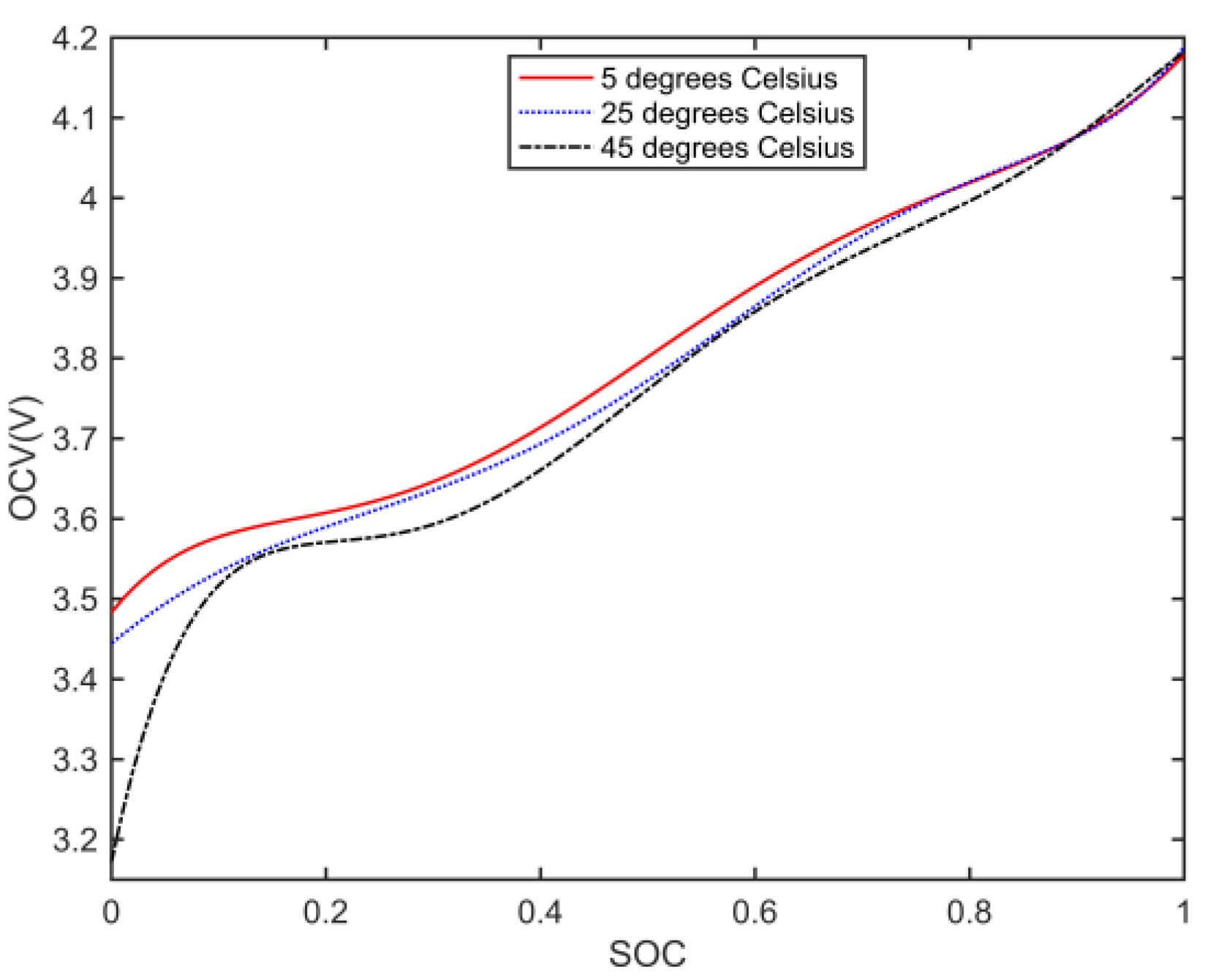
4.5. Robustness Against Parameter Disturbance
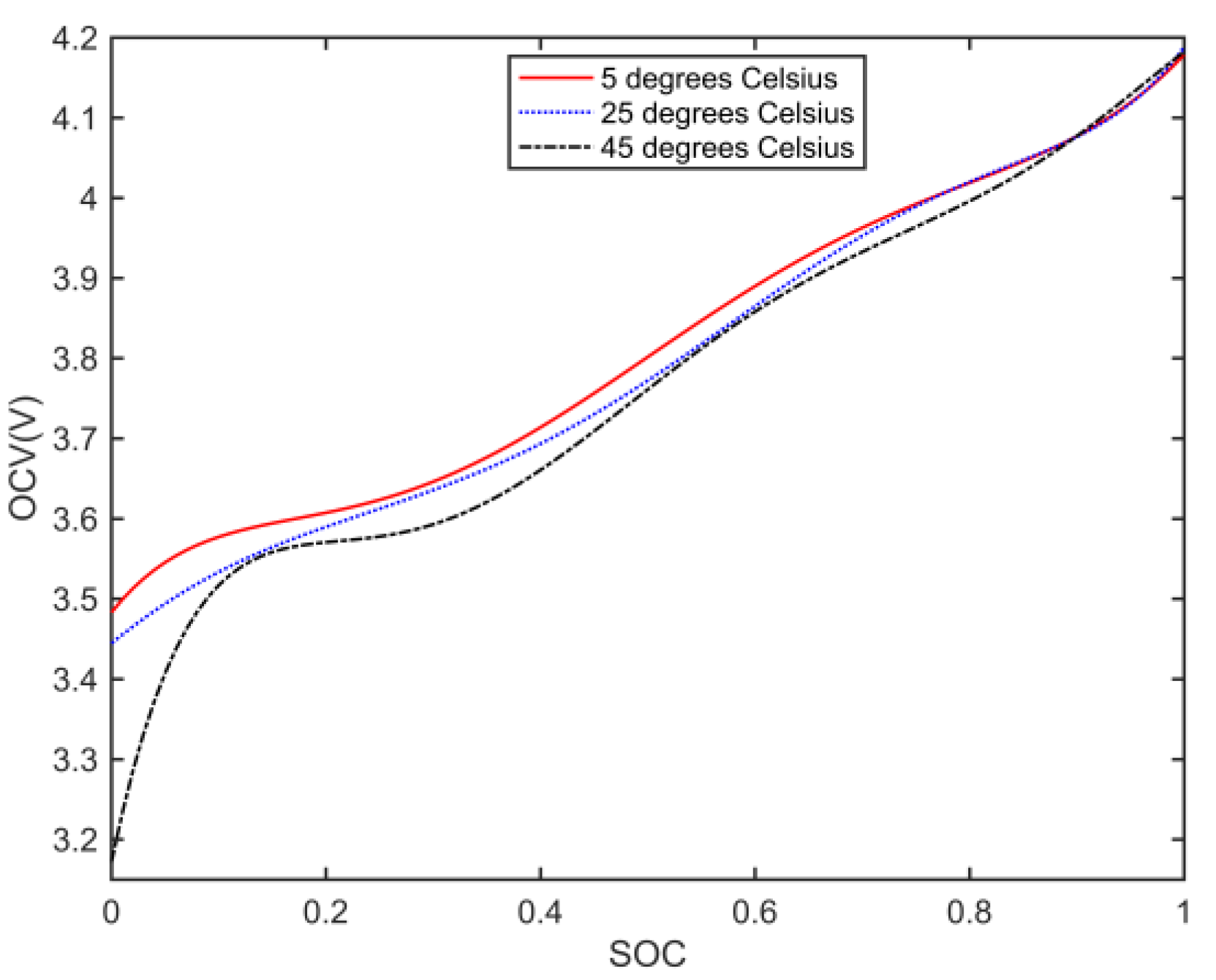
In practice, the LIBs serve in a complicated condition, and the parameters of the 2RC ECM can change greatly due to age effect or varying ambient temperature. The observer should have good performance in terms of robustness against parameter disturbances. In this section, a series of experiments using the procedure described in
Section 2.2 were implemented under 5, 25, and 45 °C, respectively.
Table 6 lists the capacities and parameters of ECM for the battery under these temperature conditions.
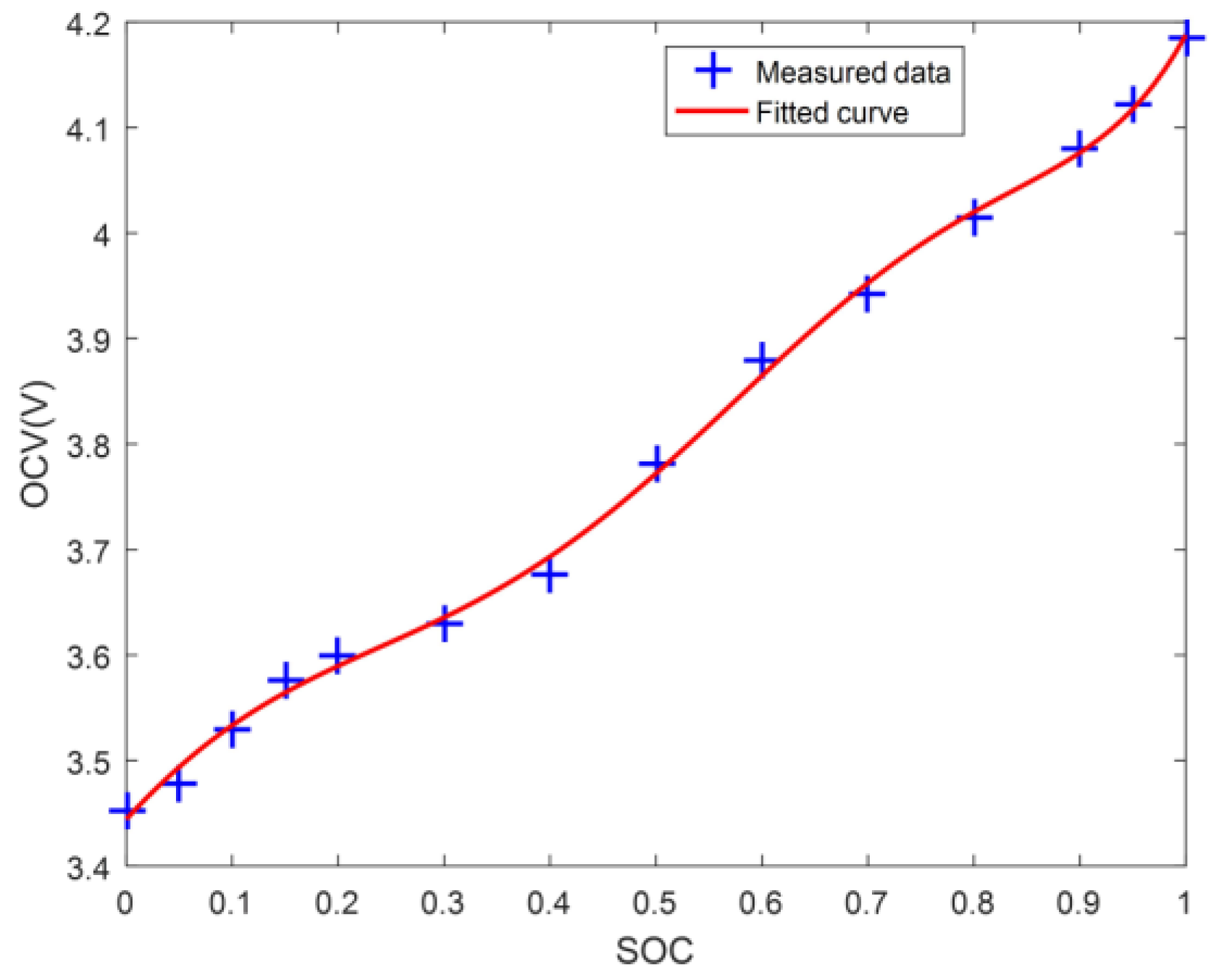
Figure 16 dipicts the relationship between the OCV and SOC under these conditions. We can see that the characteristics of the LIB changes greatly with the change of ambient temperature.
The New European Driving Cycle (NEDC) profile is applied in this experiment.
Figure 17 shows the current profile under NEDC profile. The SOC estimation results are displayed in
Figure 18.
Table 7 lists the estimation errors with the proposed observer under different temperature conditions. From
Figure 18, it is clear that the proposed observer can remain stable in a wide range of temperature conditions. This indicates that the proposed method is robust against parameter disturbance. However, when the temperature deviates from room temperature, the estimation error increases rapidly, which is especially obvious in low temperature environments. The decline in estimation accuracy attributes to the change of parameters of battery model. One possible solution is adopting an online parameter identification method to obtain the battery model parameters [
42,
43]. However, this is beyond the scope of this paper.
4.6. Comparison with Extended Kalman Filter (EKF) Method
To further demonstrate the advantage of the proposed observer, the estimation results were compared with that calculated by another well used algorithm, the extended Kalman filter (EKF). Details about EKF can be found in References [
19,
20,
21,
22]. The parameters used in EKF method are listed in
Table 8. In
Table 8,
P0,
Q and
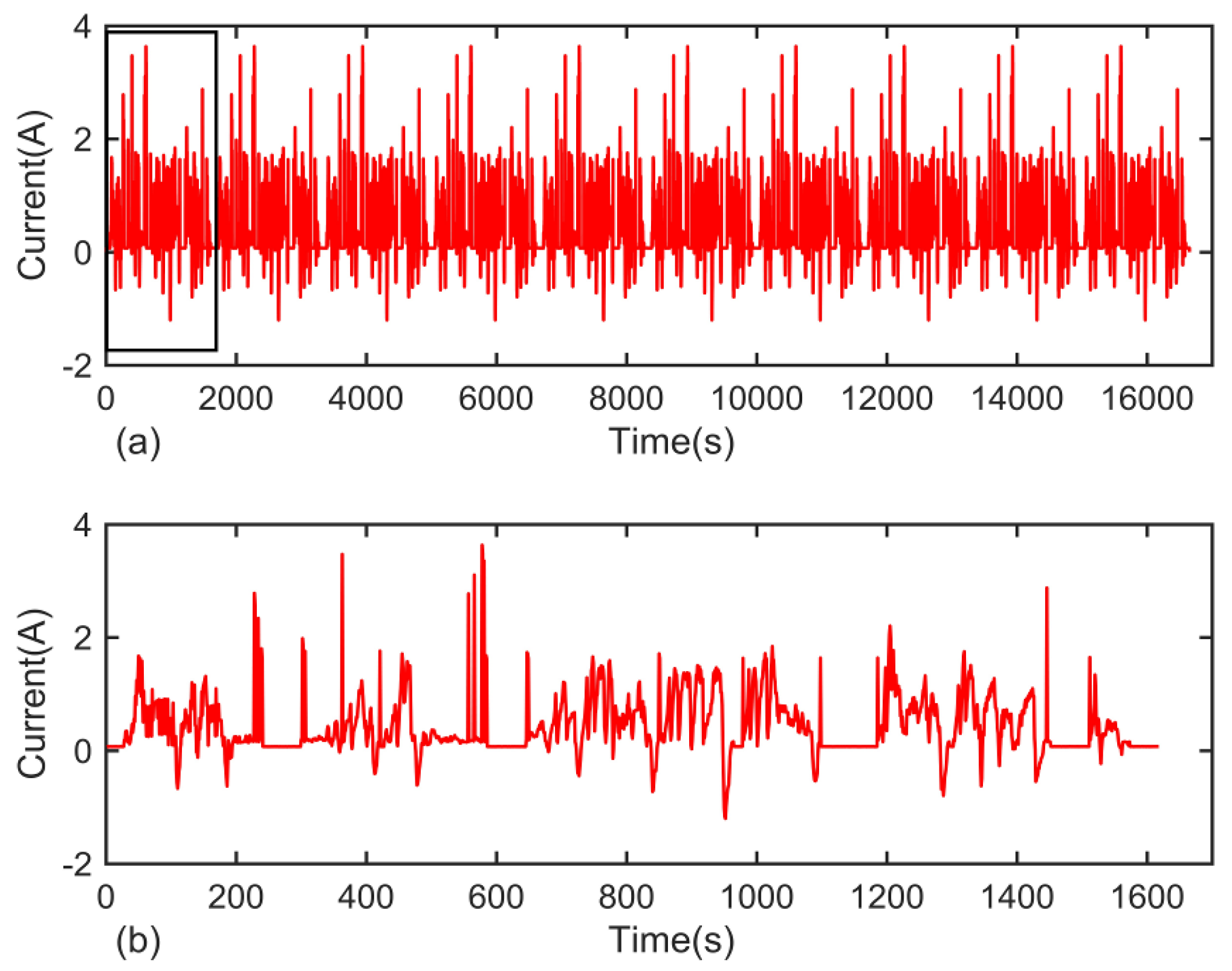
R represent initialized state covariance, process noise covariance and measurement noise covariance, respectively. The West Virginia Suburban Driving Schedule (WVUSUB) test was applied in this experiment. Its current profile is shown in
Figure 19.
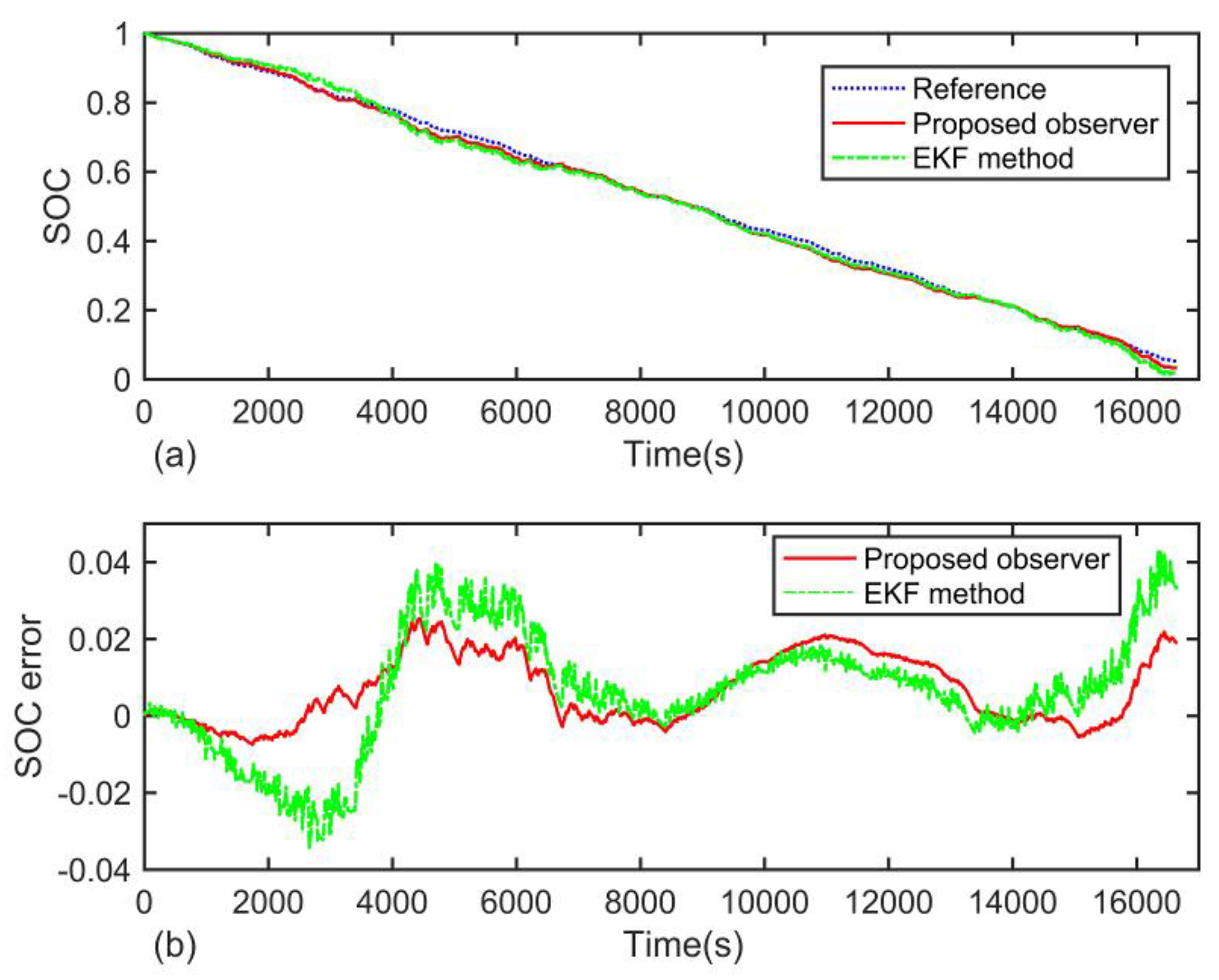
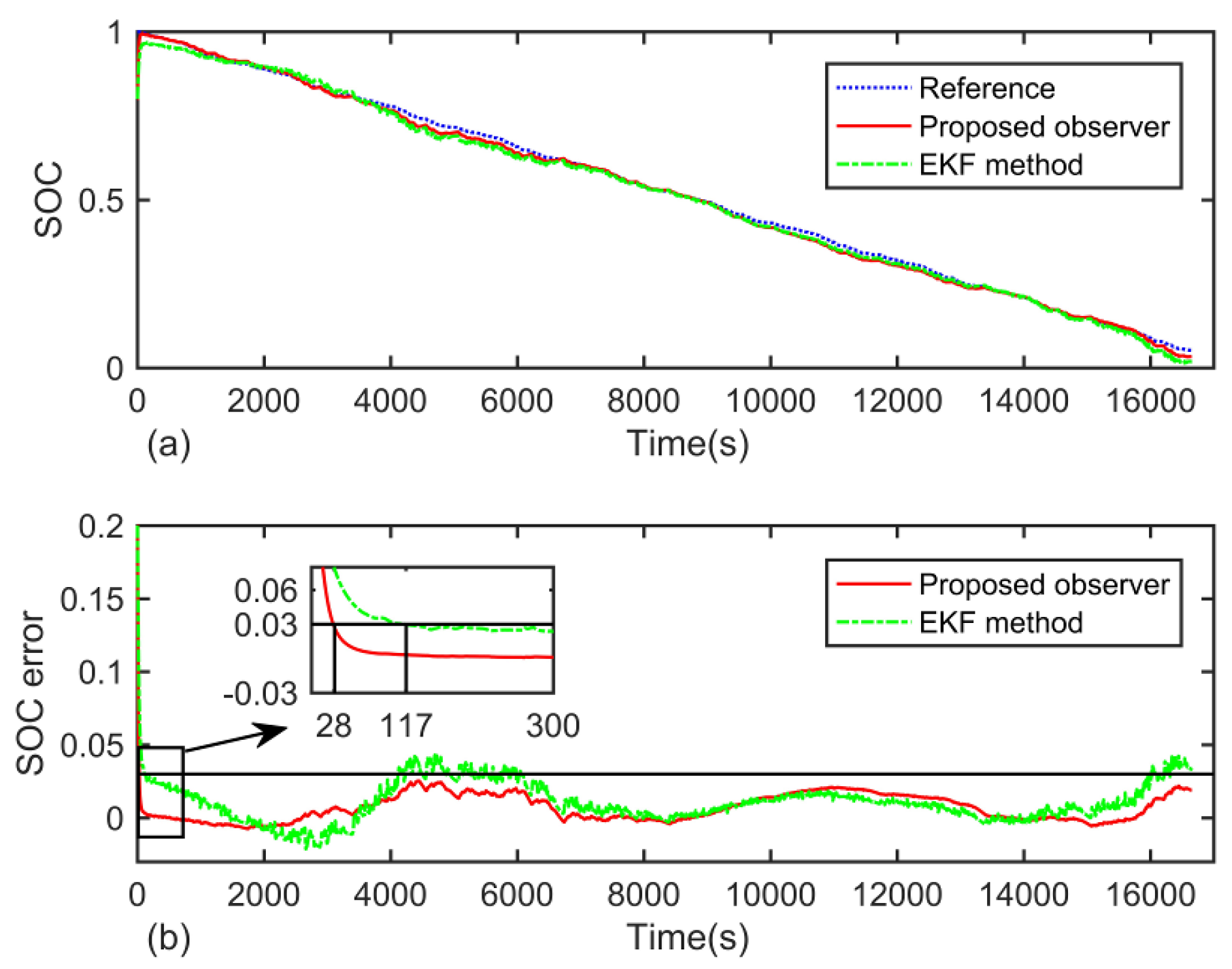
Here, we mainly focus on three aspects of the algorithms, estimation accuracy, computation cost, and convergence rate. In this test, the program running time for each algorithm was recorded to reflect the computation costs of the algorithms. Further, the time for SOC estimation error to converge to 3% for the first time was recorded to evaluate the convergence performance of the algorithms. First, the initial SOC estimation error was set to 0, and the SOC estimation results are shown in
Figure 20 and
Table 9. In
Figure 20a, the blue dotted line is the reference SOC. The red solid line and green dash-dotted line represent the ones calculated by the proposed observer and EKF methods, respectively.
Figure 20b displays the SOC estimation error. From the results, it is clear that the proposed observer has a notably lower computation cost than the EKF method. Further, the estimation accuracy of the proposed observer is higher than that of EKF method. Second, in order to compare the convergence performance of the algorithms, the initial SOC was set to 0.8—thus, the initial SOC estimation error is 0.2. The estimation results are shown in
Figure 21 and
Table 10.
From
Figure 21 and
Table 10 we can see that, under the WVUSUB condition, the time that takes the proposed observer to converge to 3% error boundary is 28 s, compared to 117 s for the EKF method. It is clear that the proposed observer has a much faster convergence rate than the EKF method.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}