A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part A: Fundamental Concepts and Design



 ,
,
Abstract
:1. Introduction
2. Problem Definition and Selection of Target Machine
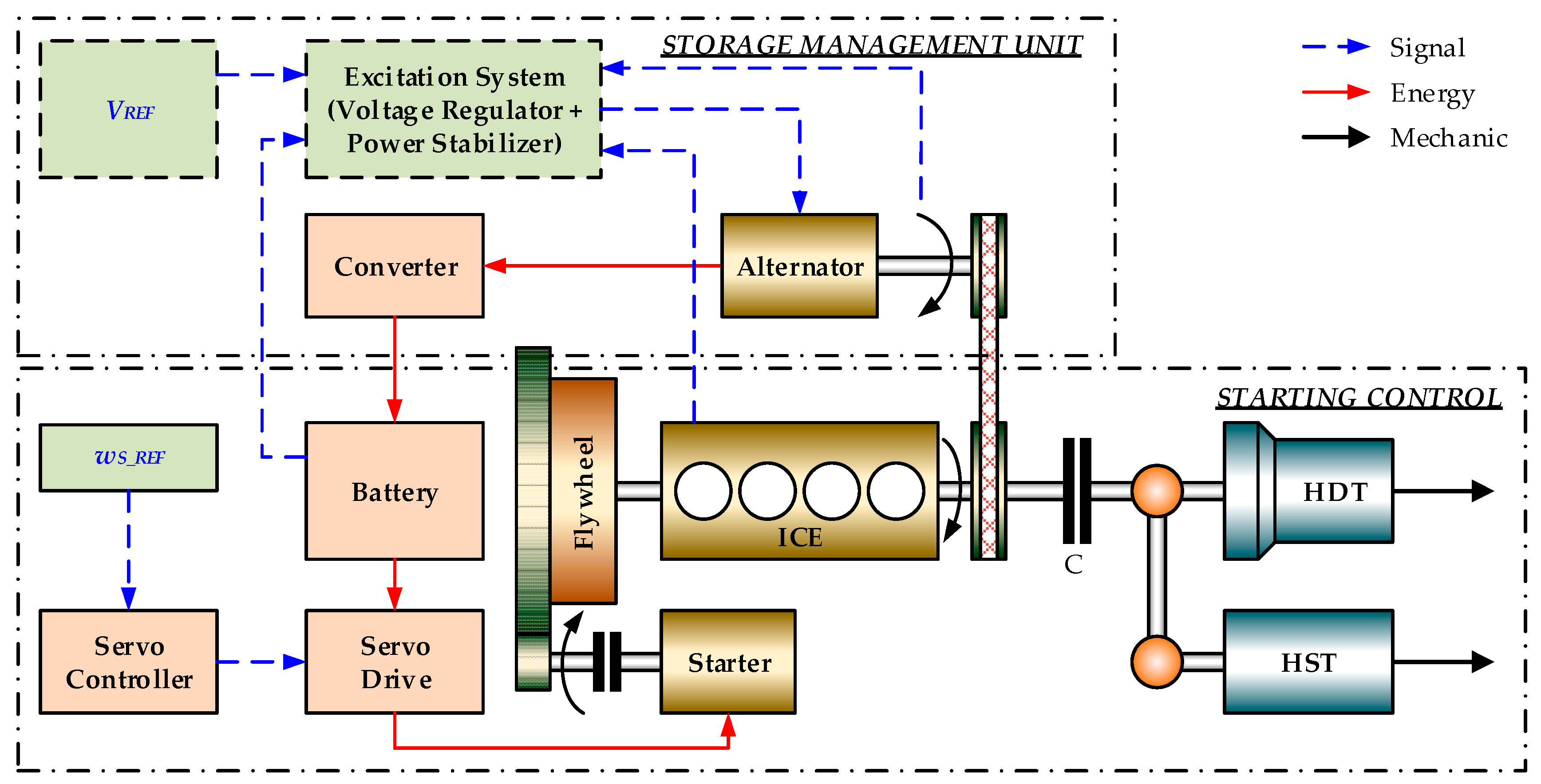
3. Powertrain Model Design
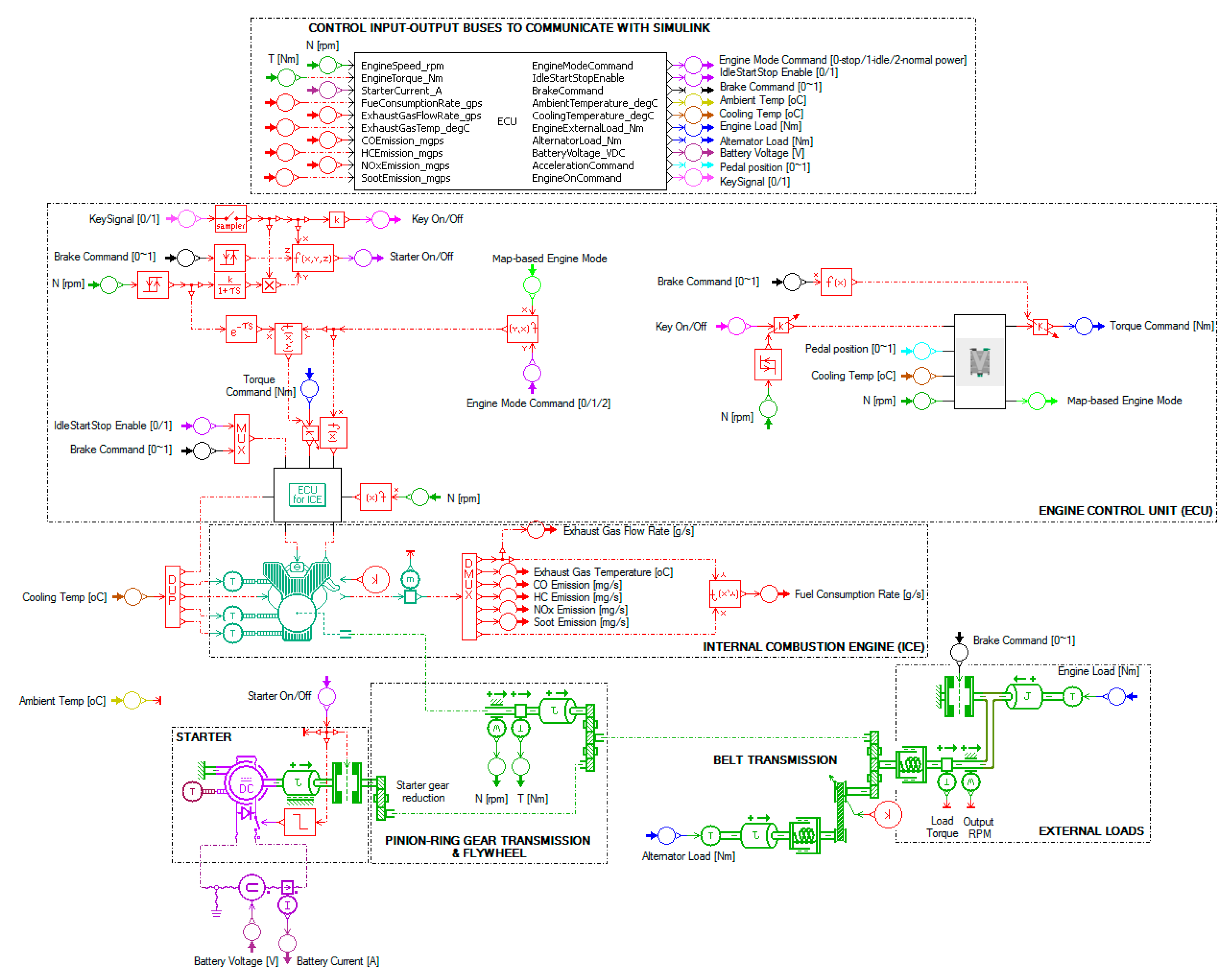
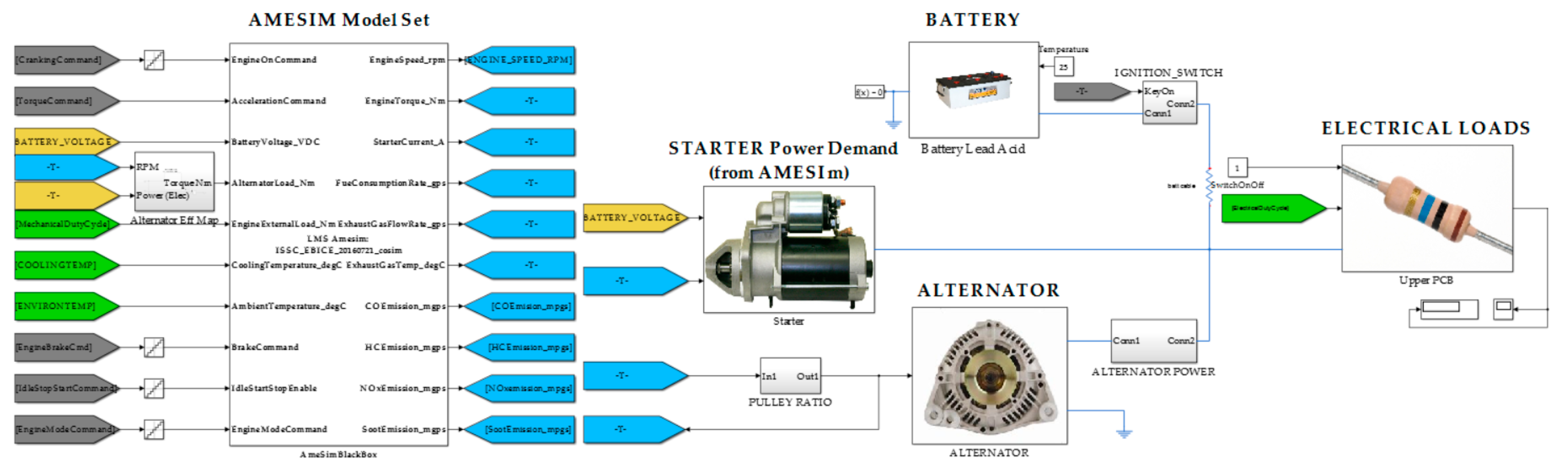
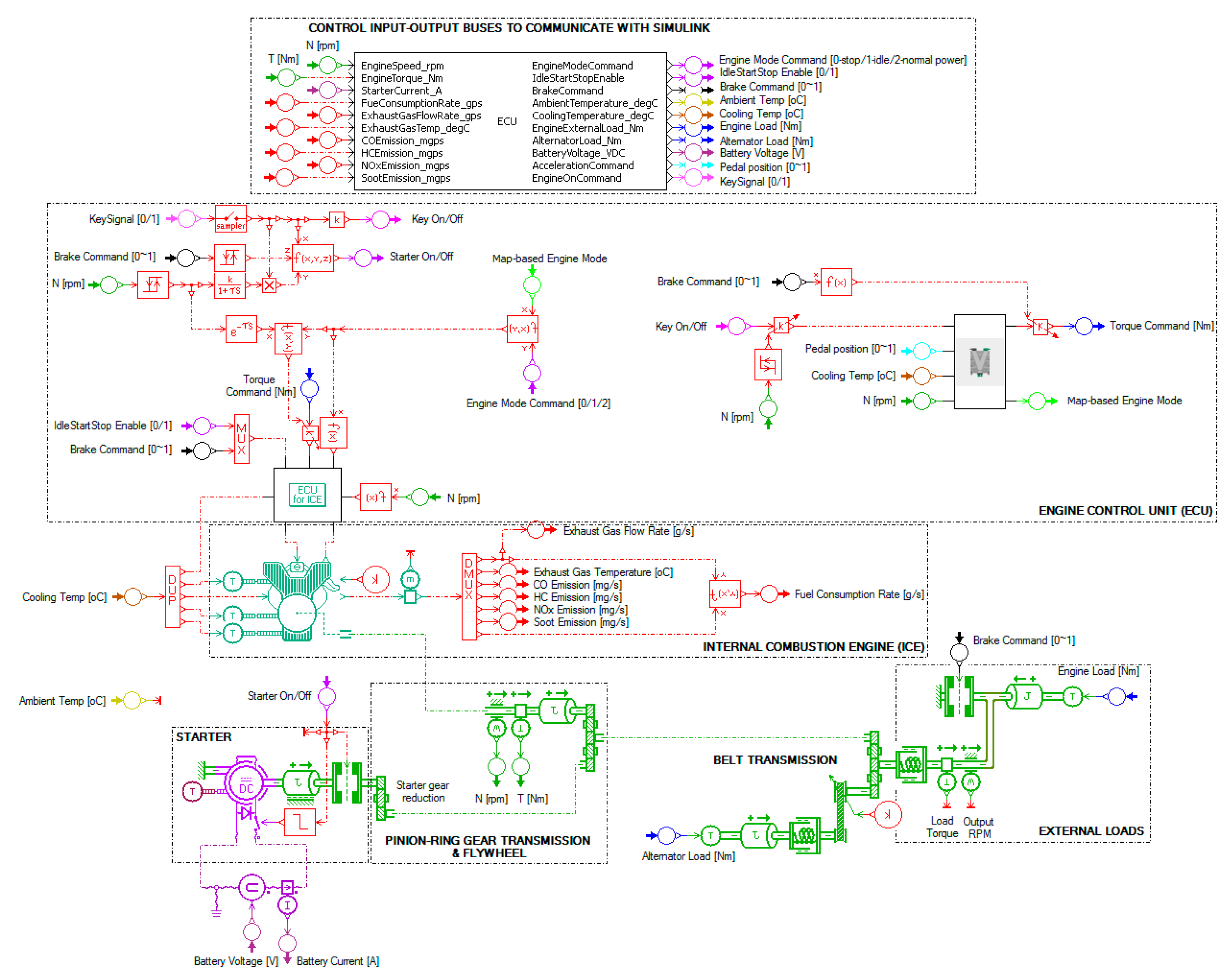
3.1. Component Models in AMESim
- Engine torque control logics: base on the ICE speed command, current ICE speed and cooling temperature to compute the engine torque request;
- ECU’s input signals: the key On/Off event, calculated ICE torque request and brake command, ISSC enable, and engine mode command (will be defined in the next section);
- Basic engine operation logics: base on the defined modes to control the combustion process of the engine;
- Starter control logics: to drive the starter. In this typical powertrain, the starter is to crank the engine from zero speed to low idle speed. Once the engine reaches to its low idle speed, the injectors are activated to rise the engine speed to the high idle speed (ready to work) while the starter is disconnected from the powertrain and turned off.
3.2. Component Models in Simulink
4. Prediction-Based Idle-Stop-Start Control
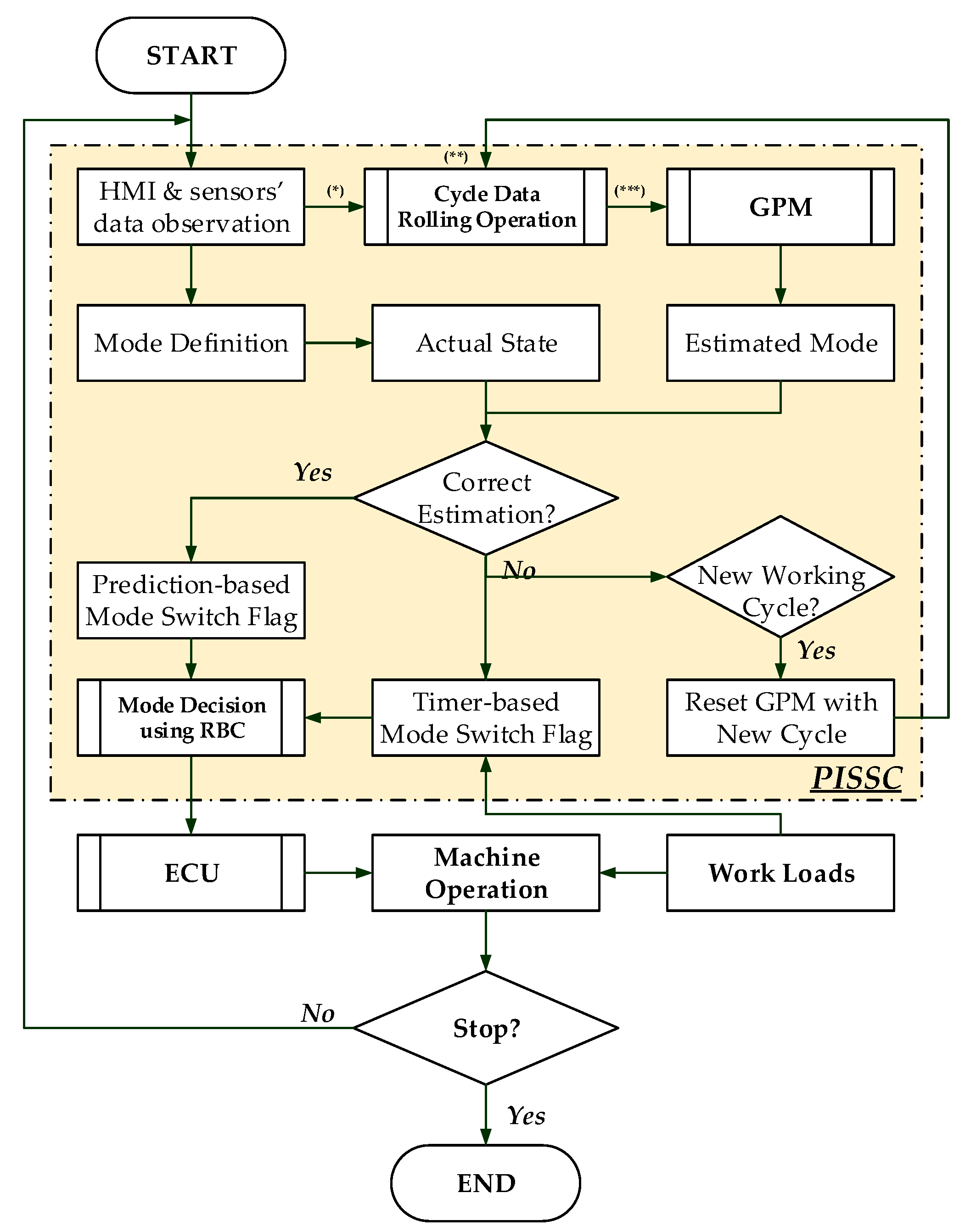
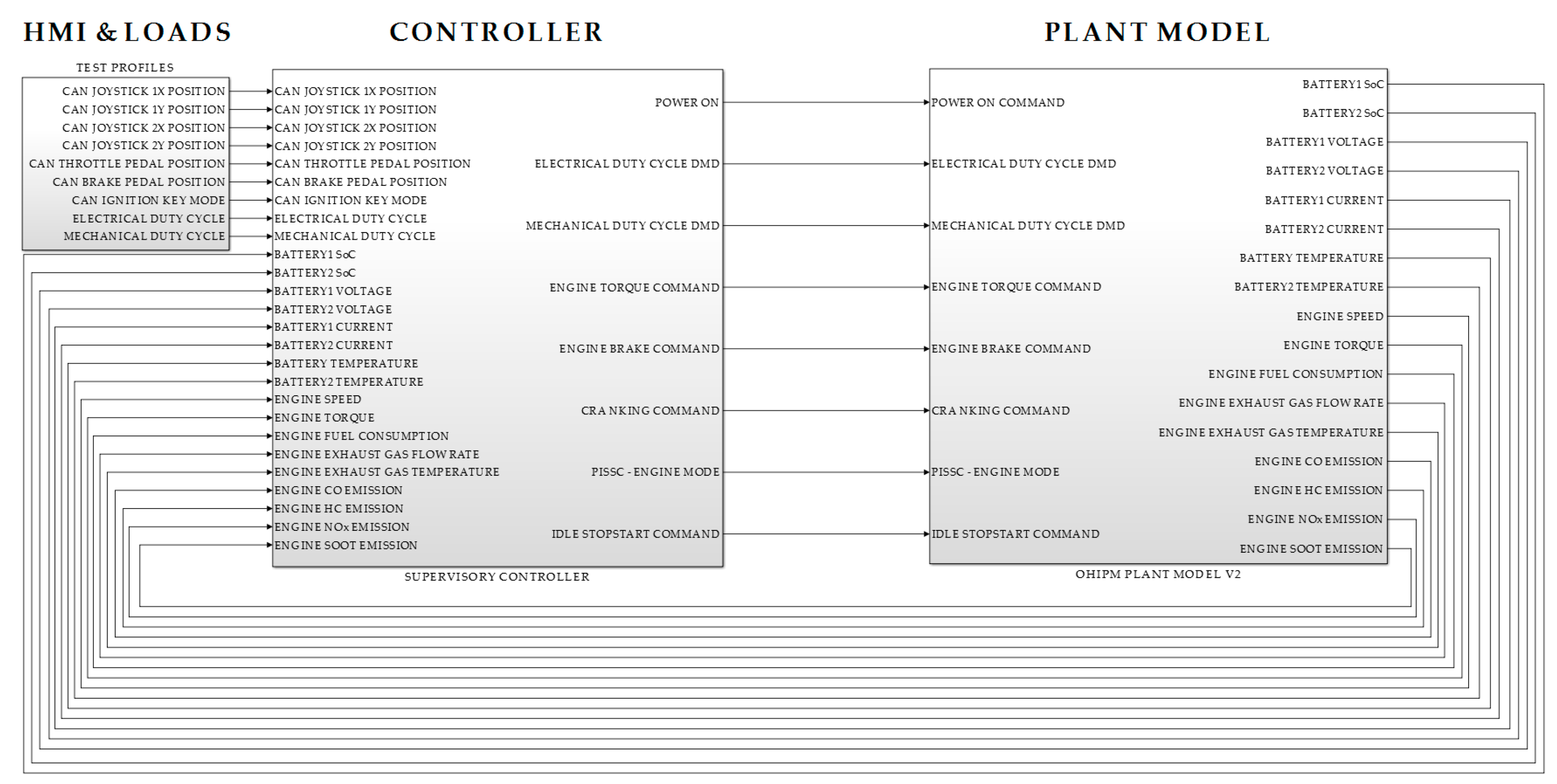
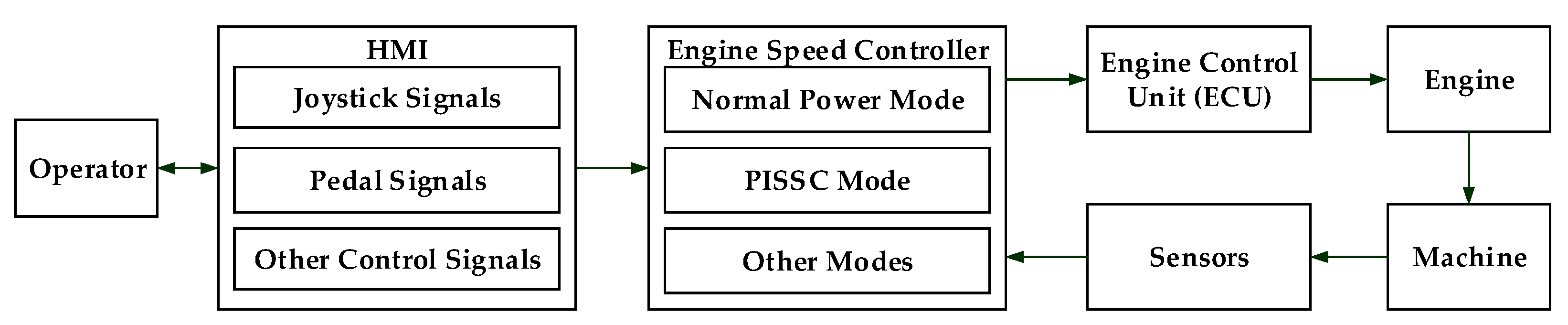
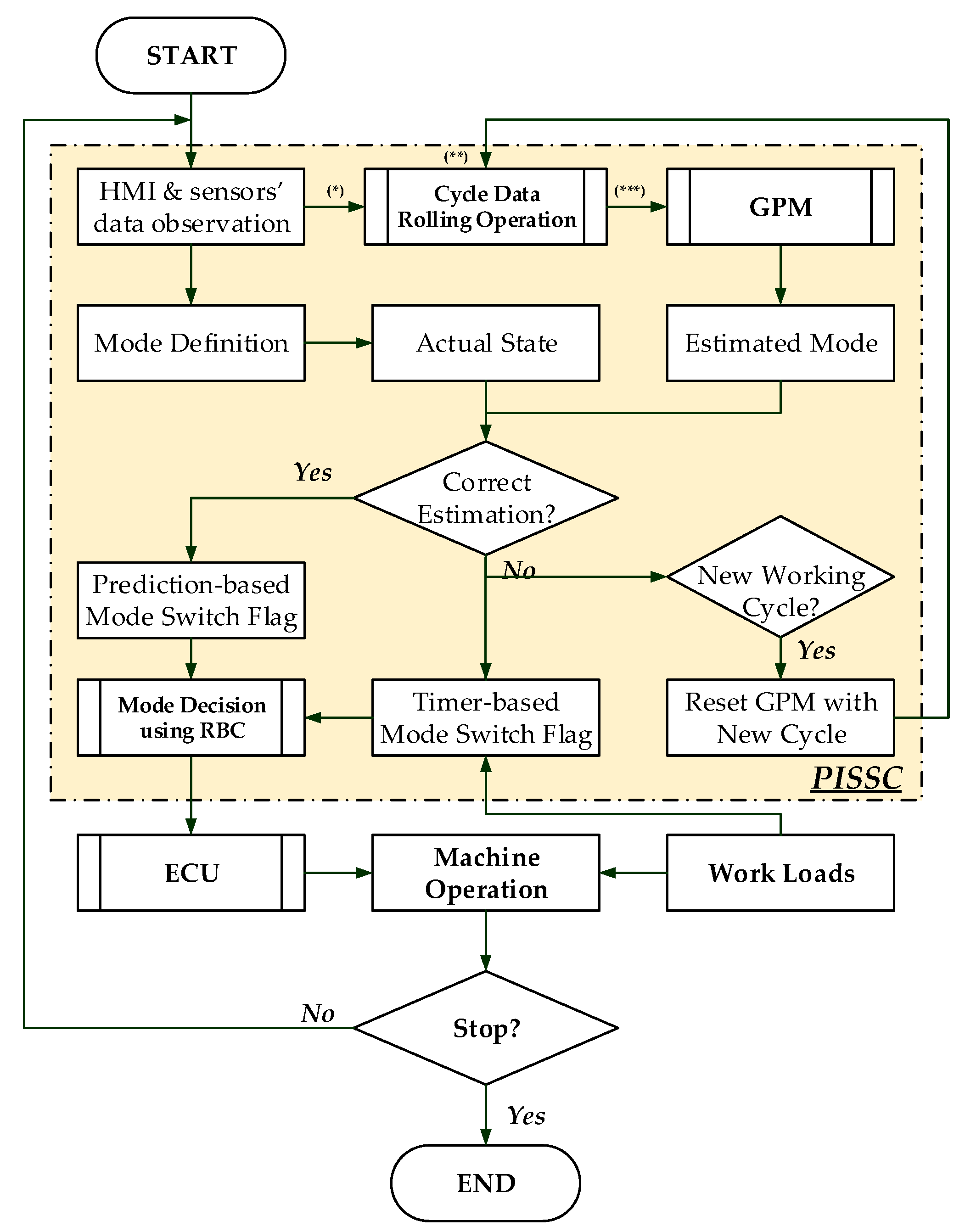
4.1. PISSC-Based Control Architecture
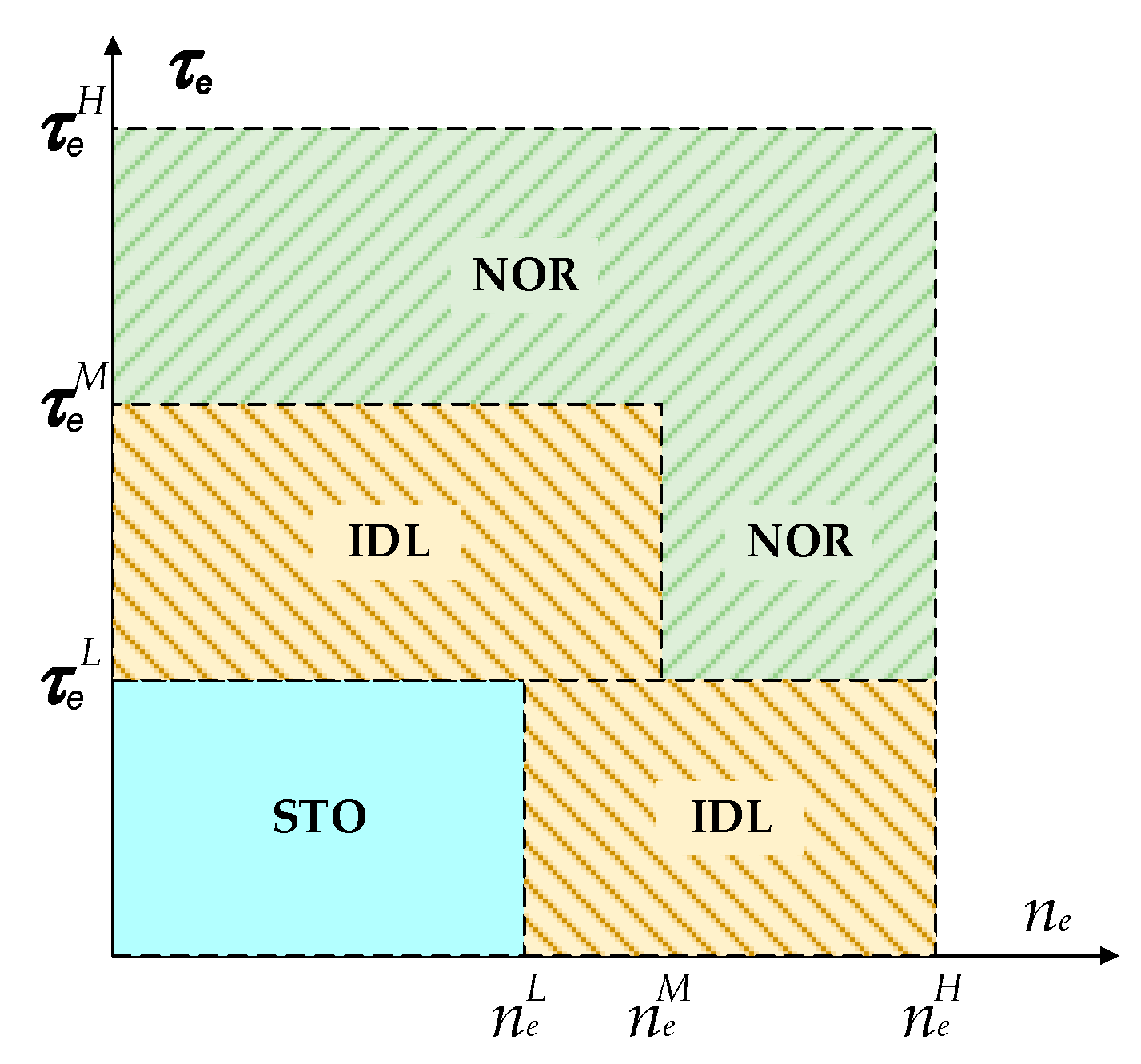
- NOR: normal mode, the machine is capable of working with full power capacity of the engine while the starter is off. This mode is used to drive the engine in the medium-high torque region or in the low-medium torque and medium-high speed region.
- IDL: idle mode, the engine does not work with its full power capacity by utilizing the cylinder deactivation control technology [14] while the starter is off. Therefore, this mode is used to drive the engine in the low-medium torque regions.
- STO: stop mode, the engine is shut down to save the fuel and the starter is also off. This mode is enabled when there is no command given from the HMI module, no external load and both the engine torque and speed are below the low torque and speed levels, respectively. The clutch C in Figure 1 is opened and, therefore, the ICE torque is only the sum of internal torque factors, including ICE torques, starter and alternator inertia torques and transmissions’ torque [8].
- STA: start mode, the engine is cranked from zero speed to its idle speed. The starter is firstly turned on to crank the ICE to a very low idle speed. At the low idle speed, the starter is switched off and the injector starts to inject fuel to continue to crank the engine to the desired idle speed.
- A machine cycle is a specific sequence of the ICE working modes (or machine stages) formed by the operator commands and workloads. Each stage can be identified using the feedback torque-speed and the ICE mode definition, and its duration is measured using the timer.
- A machine stage is recorded if its duration is not less than a pre-defined threshold value. This value is properly selected as 3 s based on the experts and machine/ICE dynamics to avoid a frequent ON/OFF commands on the engine. Each machine stage in a cycle then can be represented by a timestamp at which the stage begins.
- Two cycles having the same machine stage sequence are considered as two dissimilar cycles if, in one cycle, there exists a stage of which its duration is more than 10% difference compared to that of the corresponding stage in the other one.
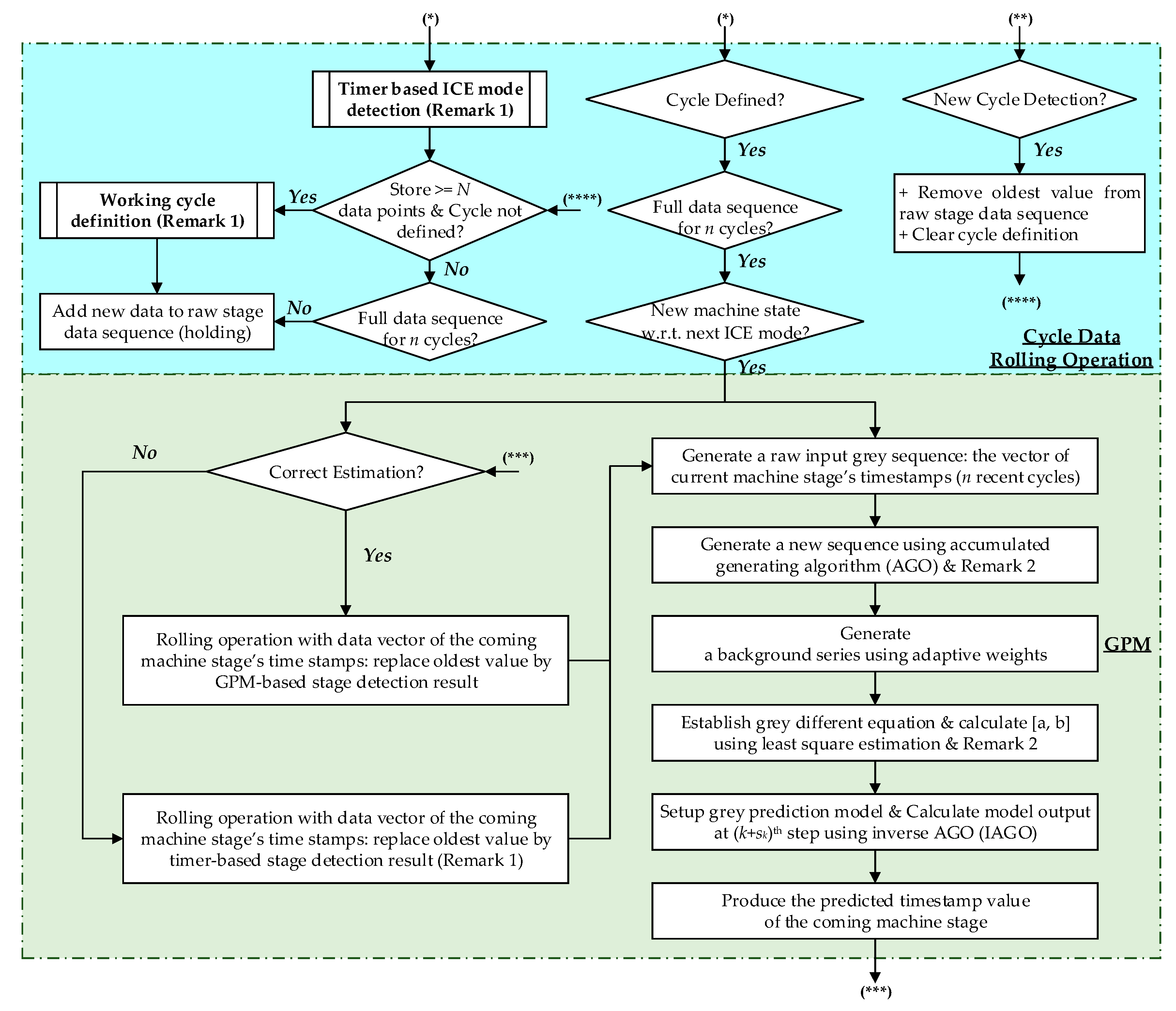
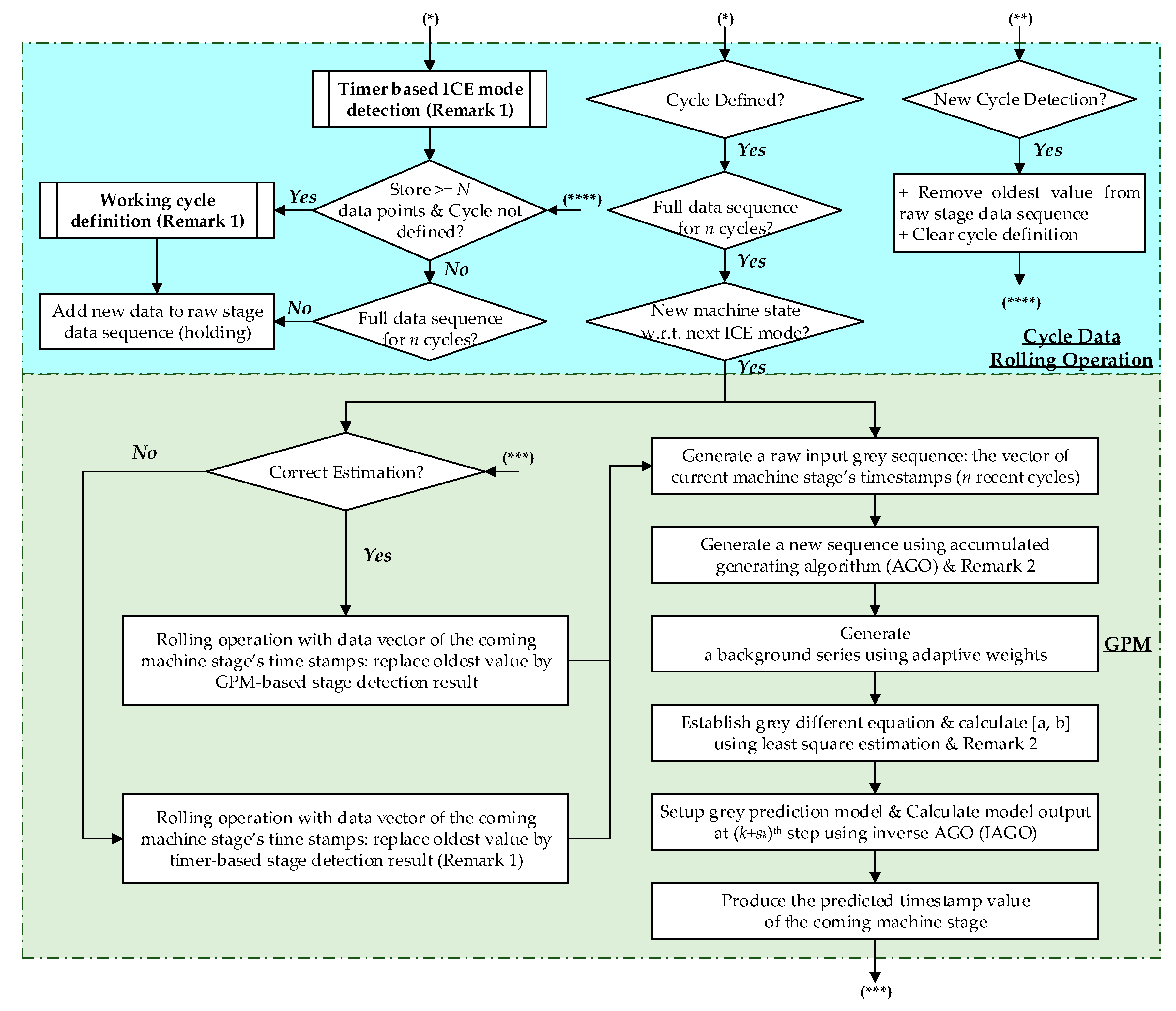
4.2. Cycle Data Rolling Operation
- Step 1: start the search with an initial number of stages per cycle (S), S0 = 2 which means the first 02 consecutive stages;
- Step 2: Check the repeatability of this stage sequence: If YES, check: the time differences of the cycle’s stages are equal or less than 10%
- + If YES, stop the search and make a decision of the machine cycle;
- Else, go to Step 3;
Else, go to Step 3; - Step 3: If S less than N, increase the number of stages per cycle: S = S + 1; Else, delete the oldest value from the recorded stage vector and stop the search.
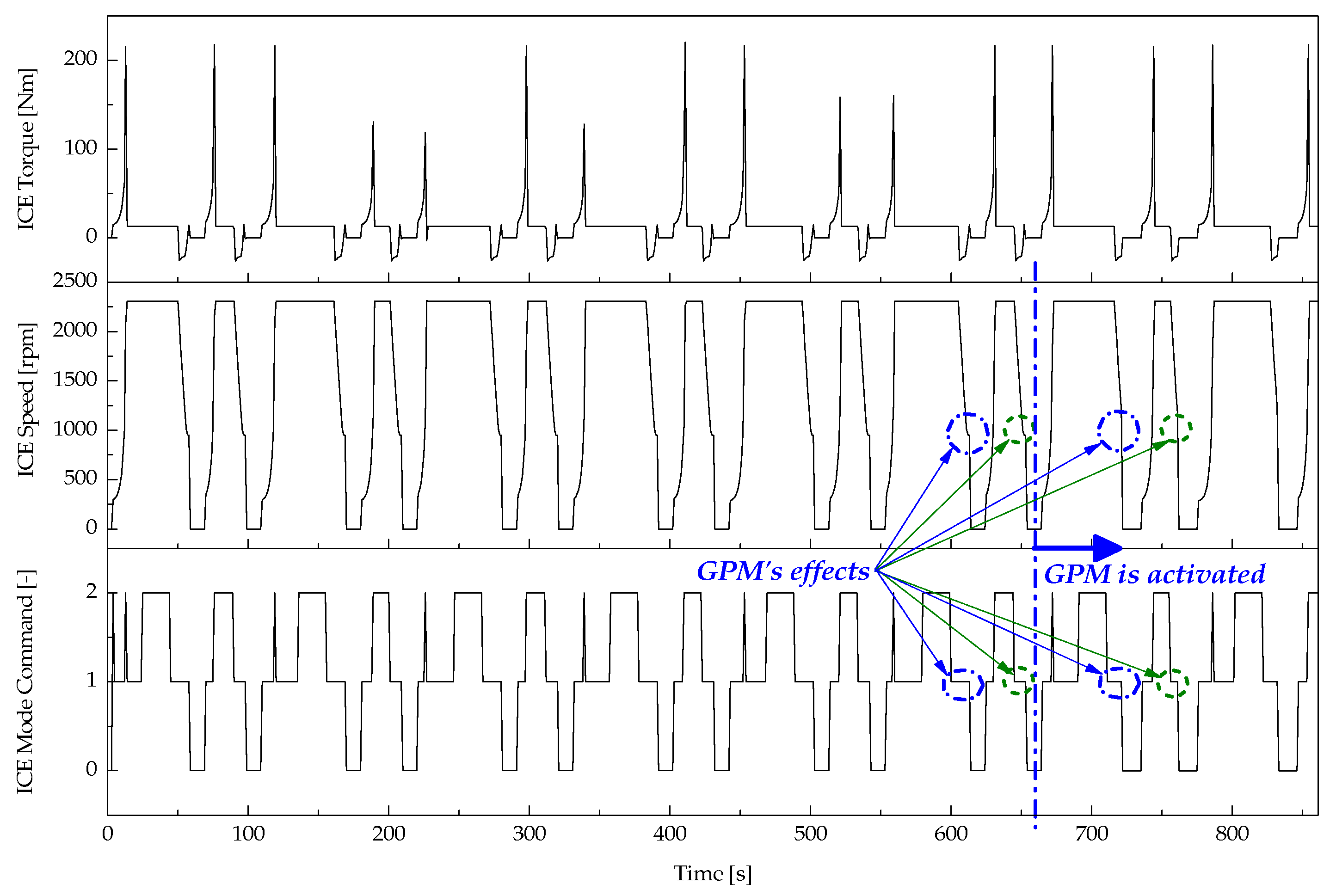
4.3. Grey Prediction Model
- Step 1:
- Create an input grey sequence when the GPM is activated:
- Step 2:
- Generate a new series Y(1) from Y(0) using the accumulated generating algorithm (AGO):
- Step 3:
- Generate a background series Z(1) from Y(1) using the mean algorithm as
- Step 4:
- Establish the GPM first-order differential equation
- Step 5:
- Perform the GPM prediction:
- Step 6:
- Compute the predicted value of at step (k + sk)th using (7) and the inverse AGO (IAGO):where sk is the prediction step size and selected as a unit in this case.
- Step 7:
- Check the prediction accuracy by comparing to the actual timestamp at which the machine stage is firstly detected:
- (1)
- De-activate the GPM and send the prediction result to the RBC for a mode decision;
- (2)
- If the prediction result is acceptable, with 5% accuracy, the machine stage data vector is updated with the estimated value using the rolling algorithm; Otherwise, the machine stage data vector is updated with the result of the timer-based ICE mode detection using the rolling algorithm;
- (3)
- Update fully the recorded stage matrix once the machine completes a working cycle using the rolling algorithm.
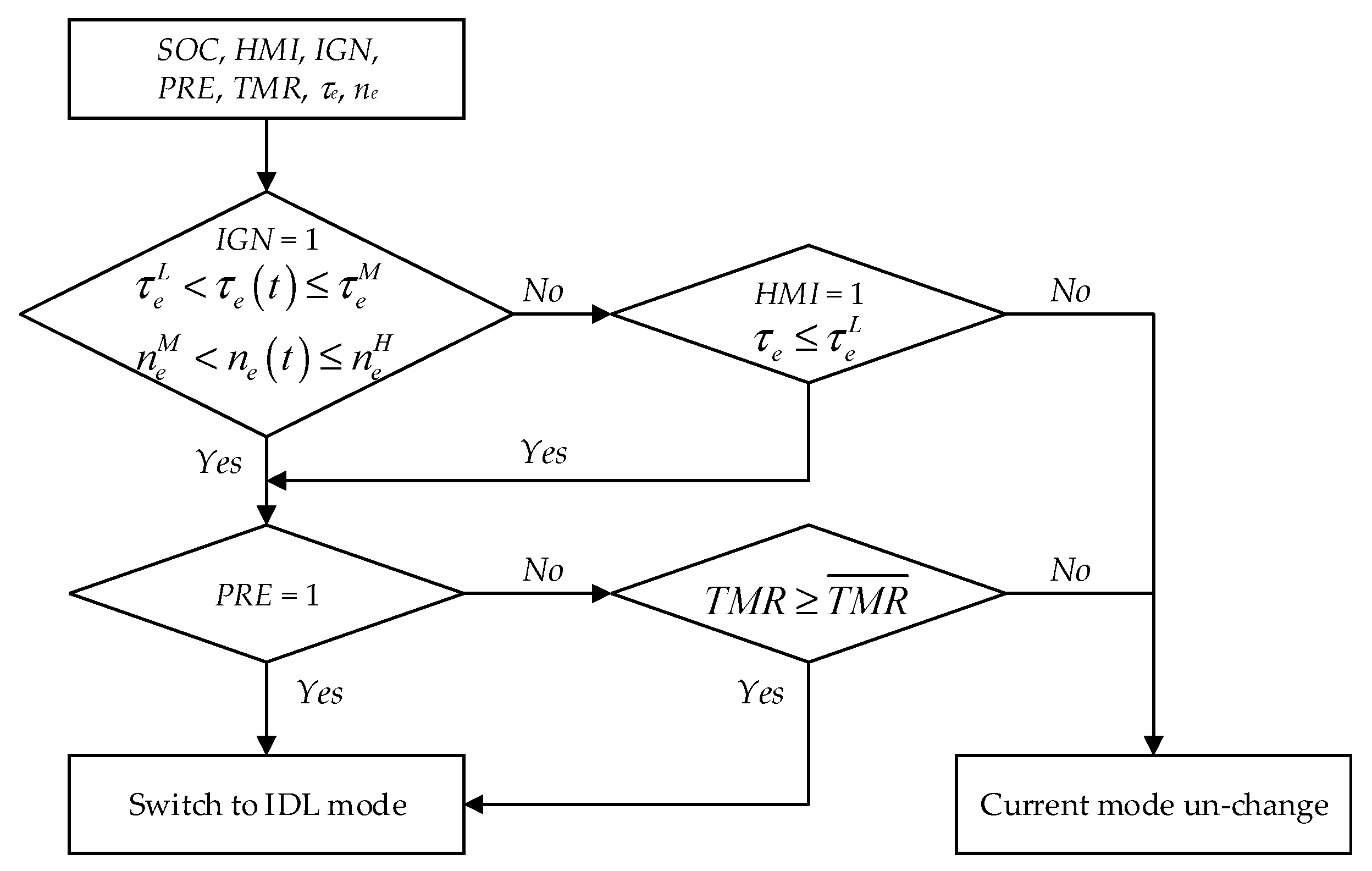
4.4. Rule-Based Controller Design for ICE Mode Decision
- are the engine torque and speed, respectively. By using the actual torque-speed performance map of each specific machine, three torque and speed levels, high, medium and low, are in turn selected as: to determine the ICE modes.
- HMI (HMI flag) is a variable which is unit if there exists at least a signal sent from the HMI module, and is zero vice versa.
- TMR is value of the timer which counts number of continuous states of the engine which are within the same working mode difference from the current mode. This TMR is reset once having a new series of engine states or a new engine mode selected. is the pre-defined threshold value for TMR, .
- PRE is a variable representing a correct estimation of the GPM (if the estimation error is within a pre-defined acceptable range). Then, PRE = 1 if correct and PRE = 0 if not correct.
- IGN is a variable representing the engine state, IGN = 1 if ICE is on and IGN = 0 if ICE is off.
- SOC is the battery state of charge representing the energy remained in the battery (in percentage). In order to enable stop-start operation, this SOC should be greater than a minimum level SOCmin which allows the starter can crank the engine when STA mode is enabled. In this case, SOCmin is set to 70%.
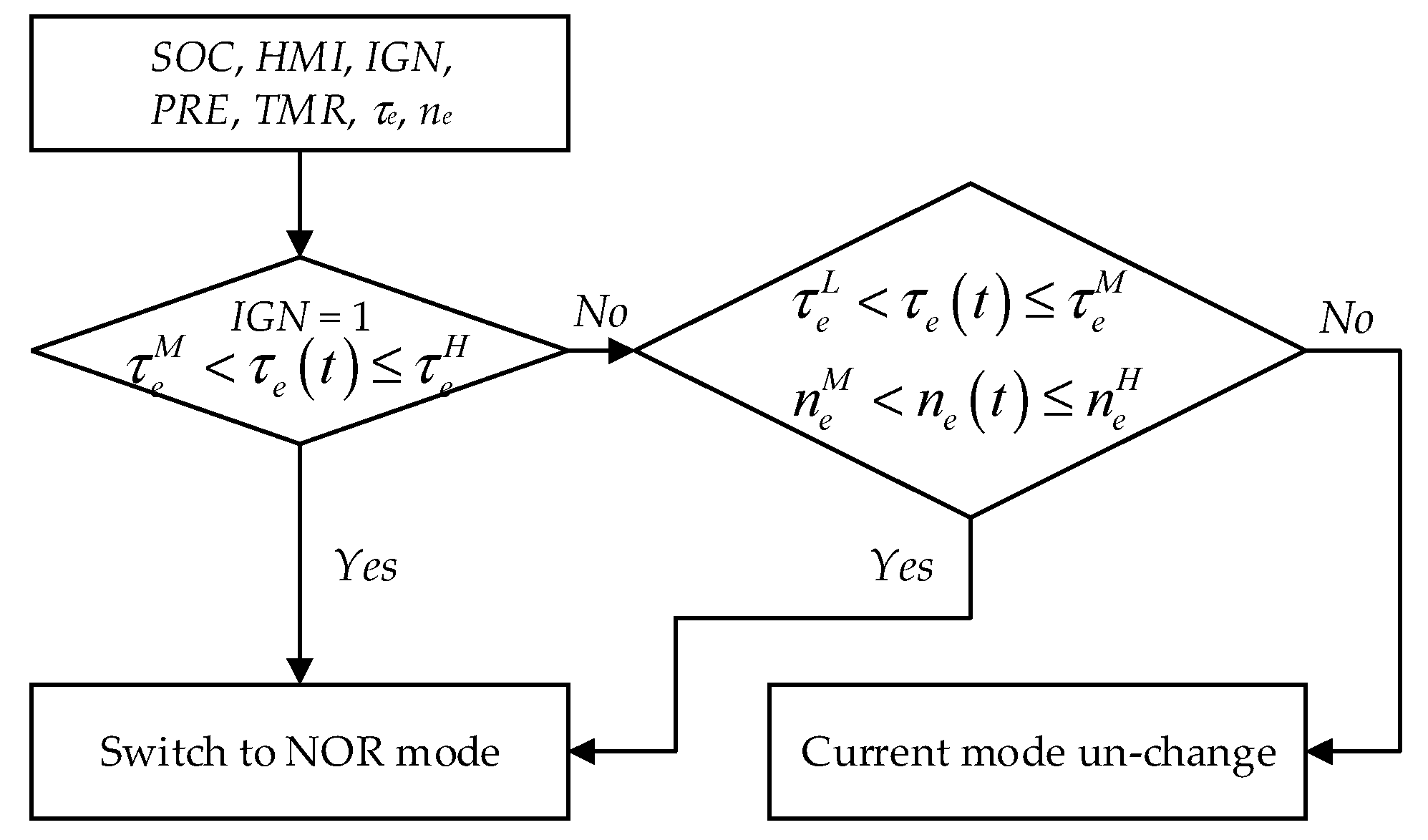
- Rule for NOR mode: when the ICE is running (IGN = 1), if the ICE torque and speed satisfy: or ( and ), the ICE is shifted to NOR mode; otherwise, it continues to stay in the current mode. This logic is demonstrated in Figure 8.
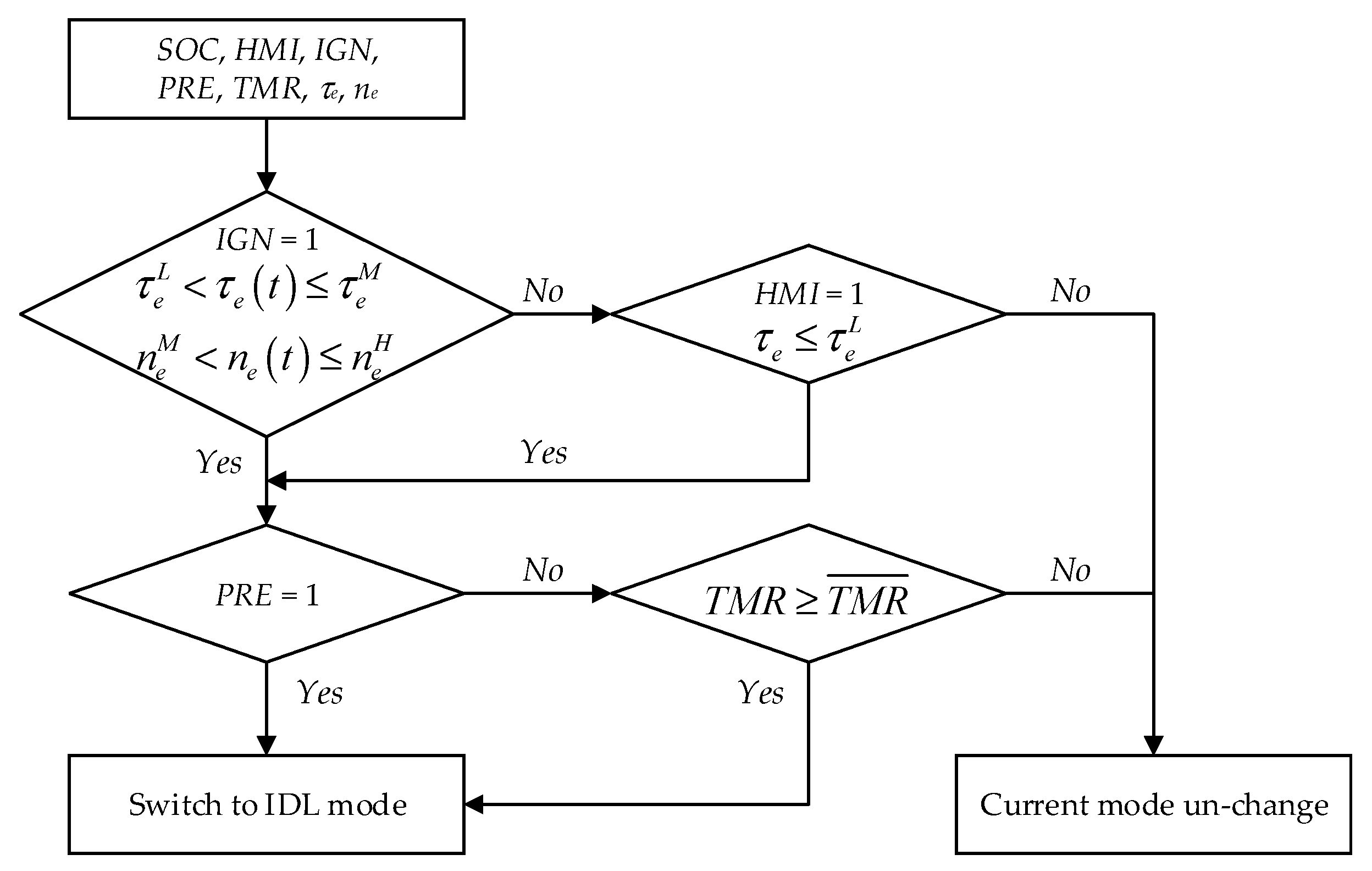
- Rule for IDL mode: when the ICE is running (IGN = 1), if the ICE torque and speed satisfy: ( and ) or ( and ), one has:
- (1)
- + The outputs from the GPM and timer are considered; if PRE = 1 or , the ICE is shifted to IDL mode;
- (2)
- + Otherwise, it continues to stay in the current mode as described in Figure 9.
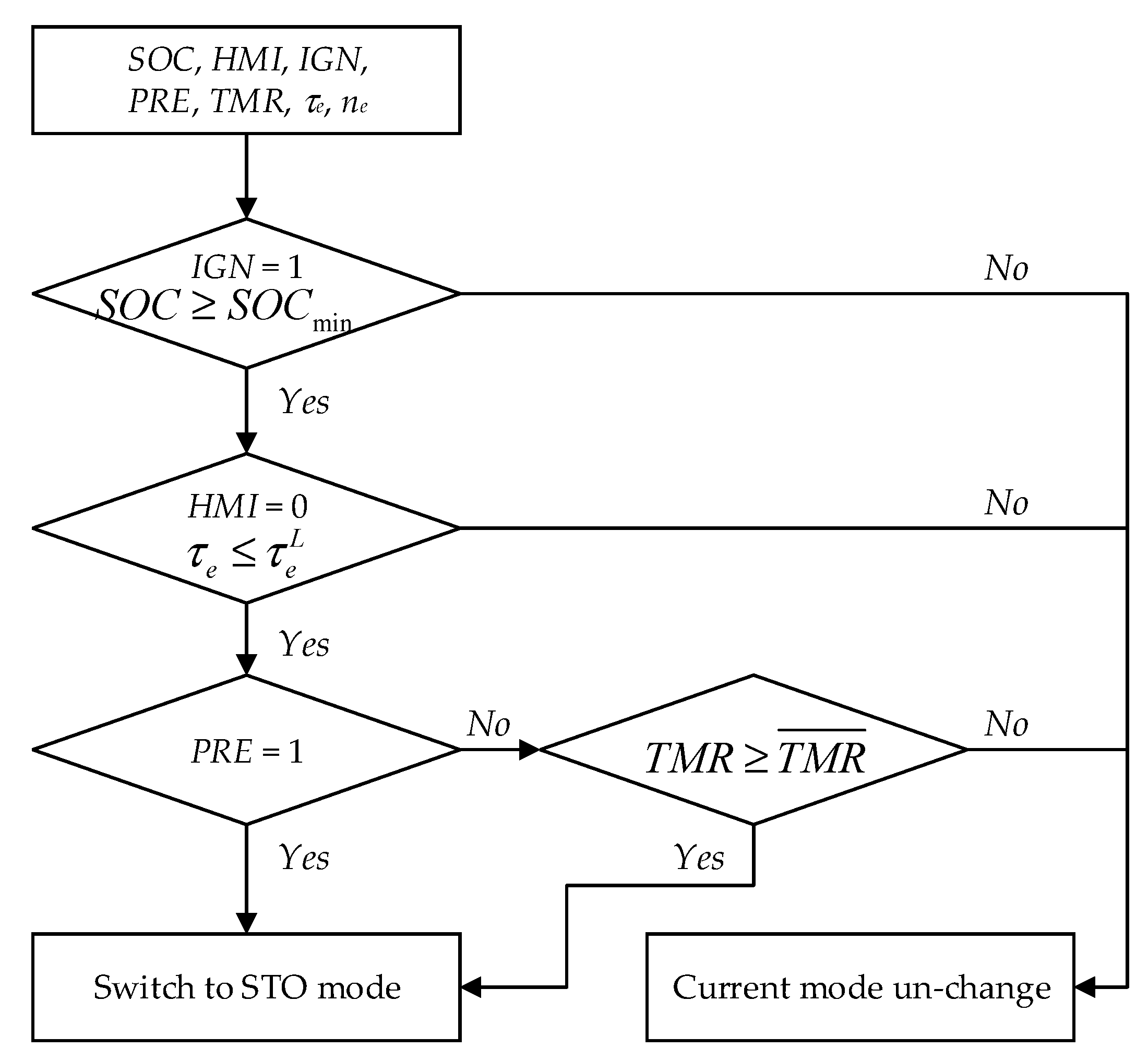
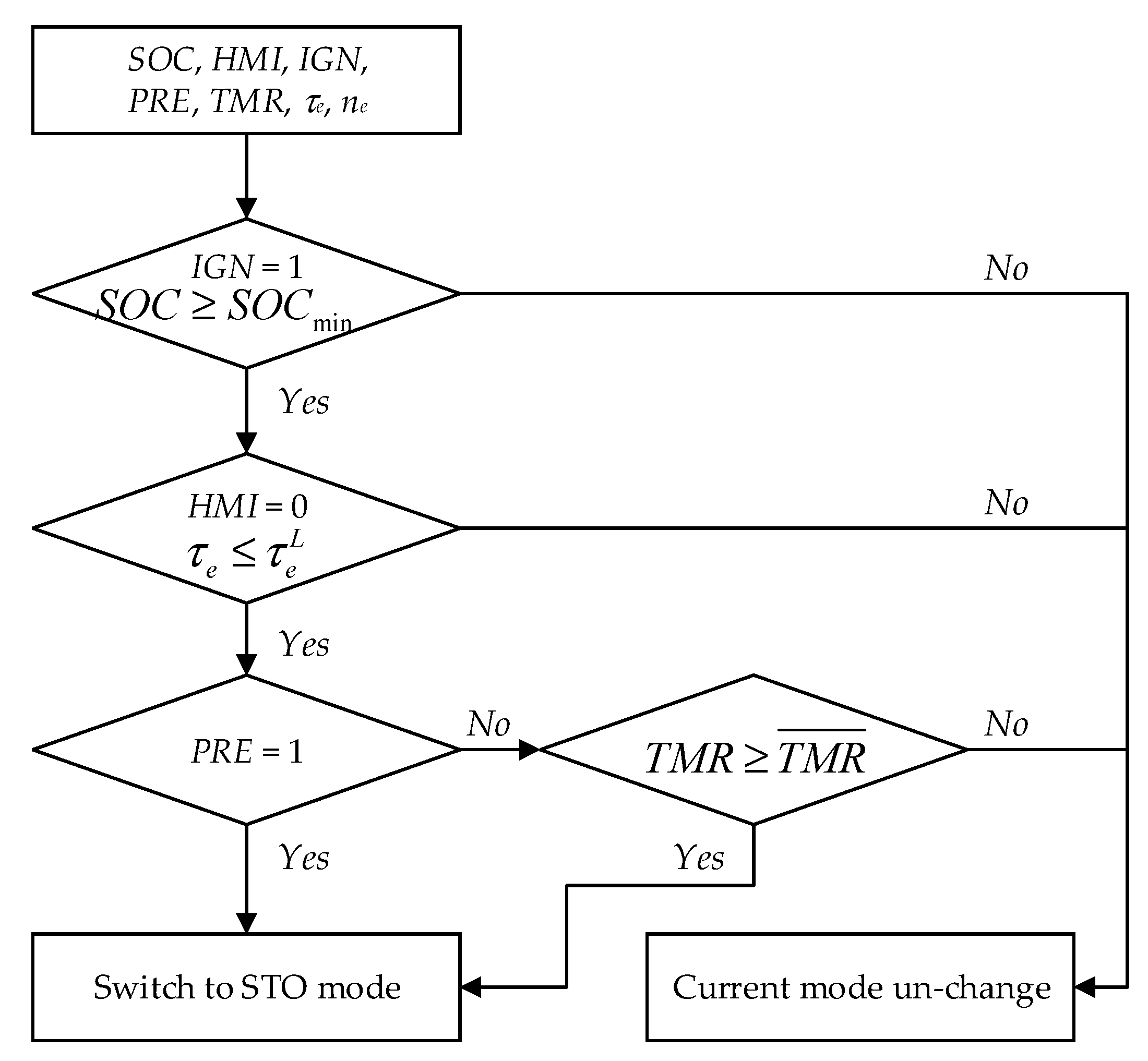
- Rule for STO mode: when the ICE is running (IGN = 1) and battery is healthy , if the ICE torque satisfies and there is no HMI signal , one has:
- (1)
- + The outputs from the GPM and timer are considered; if PRE = 1 or , the ICE is shifted to STO mode;
- (2)
- + Otherwise, it continues to stay in the current mode as described in Figure 10.
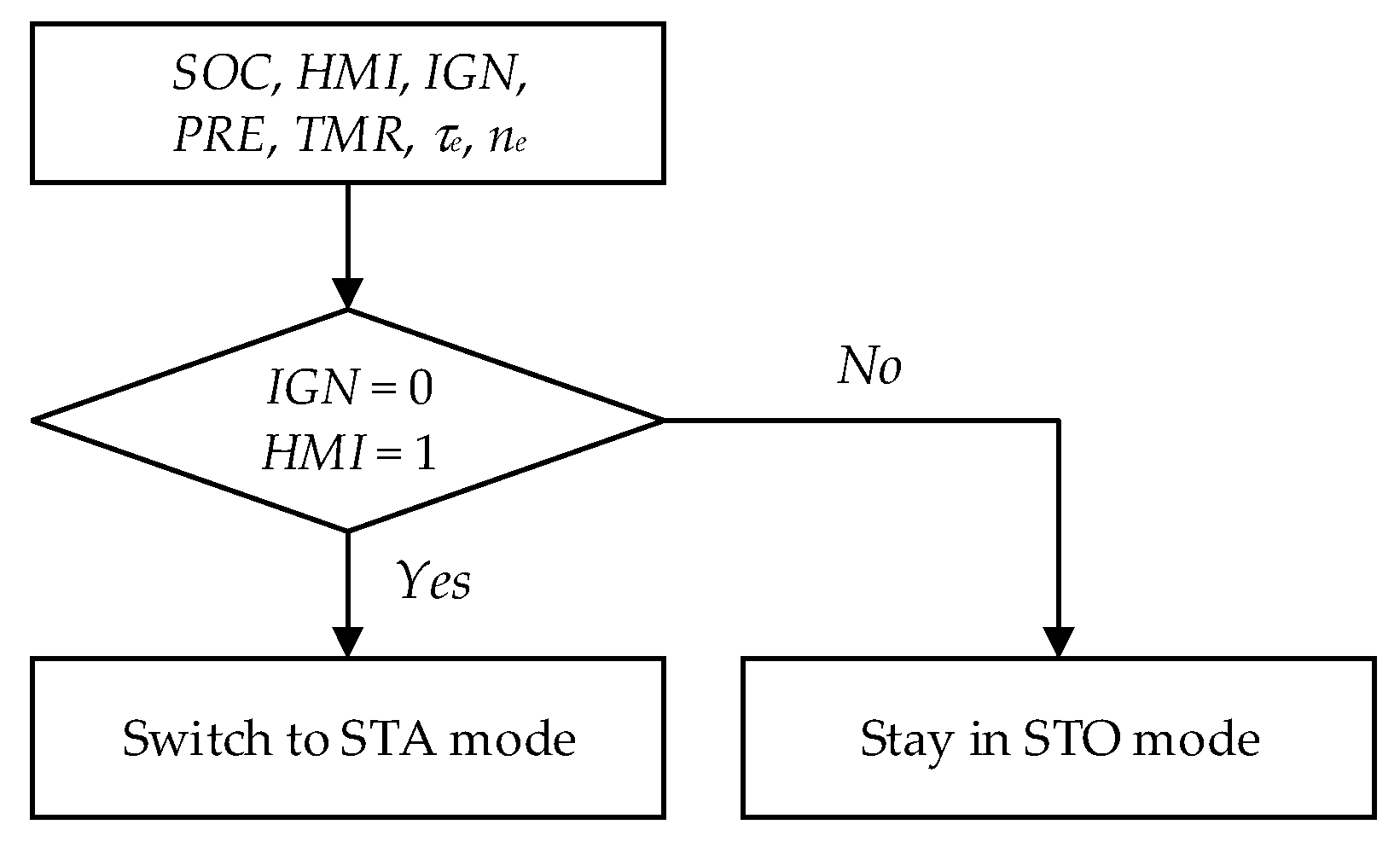
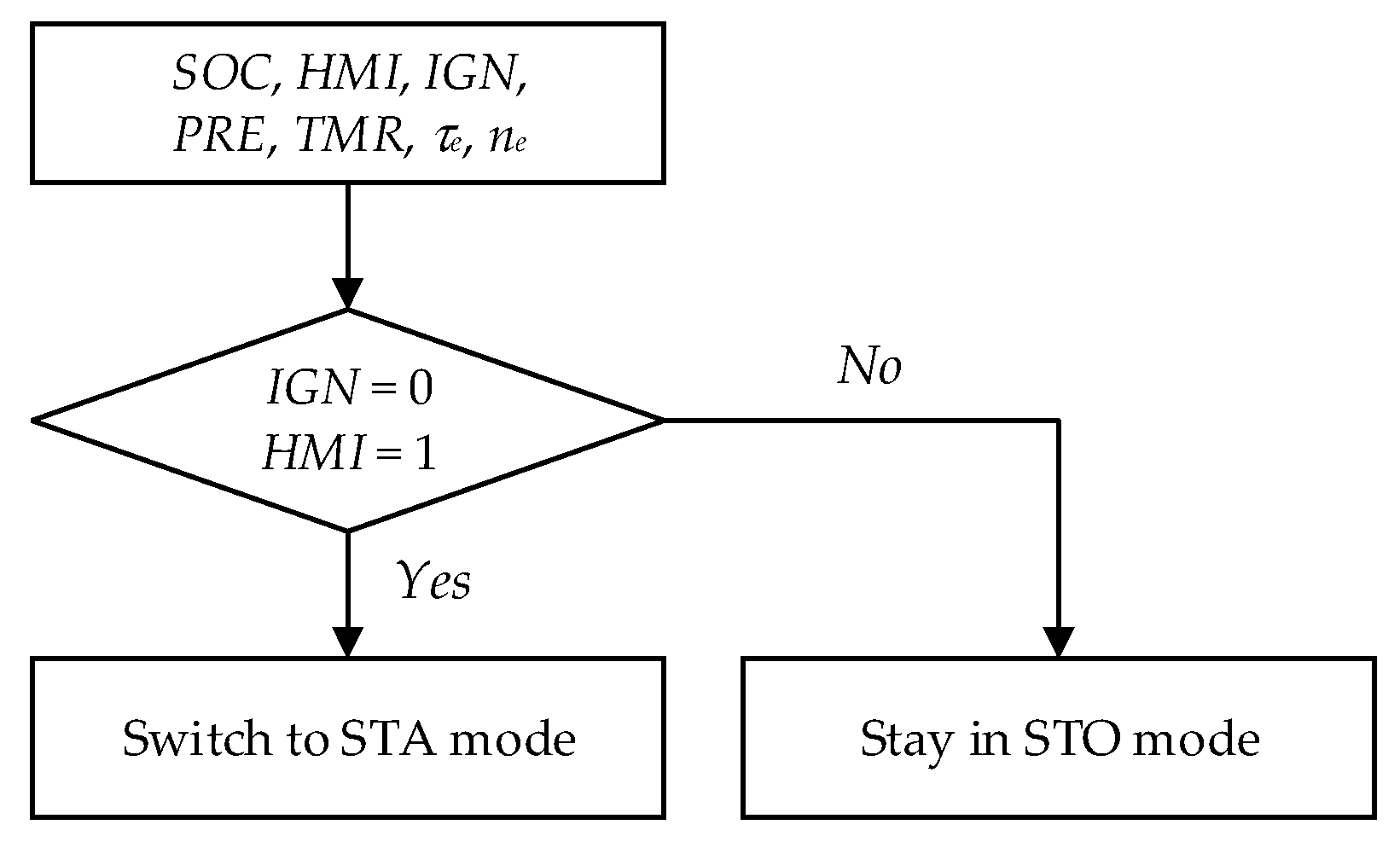
- Rule for STA mode: when the ICE is stopped (IGN = 0), if there exists any signal sent from HMI (HMI = 1), the ICE is shifted to STA mode; otherwise, it continues to stay in the STO mode. This logic is demonstrated in Figure 11.
5. Case Study and Simulation Results
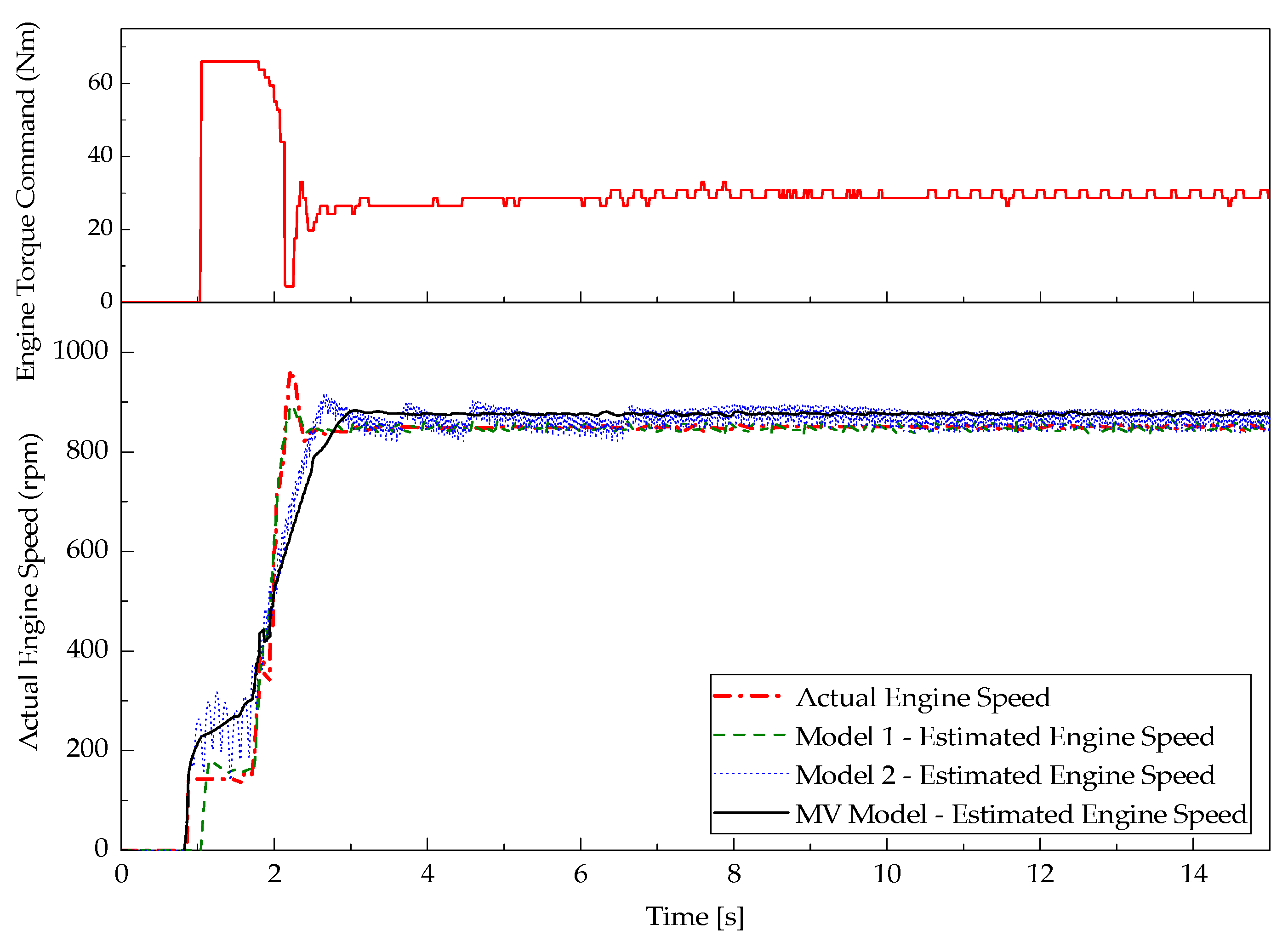
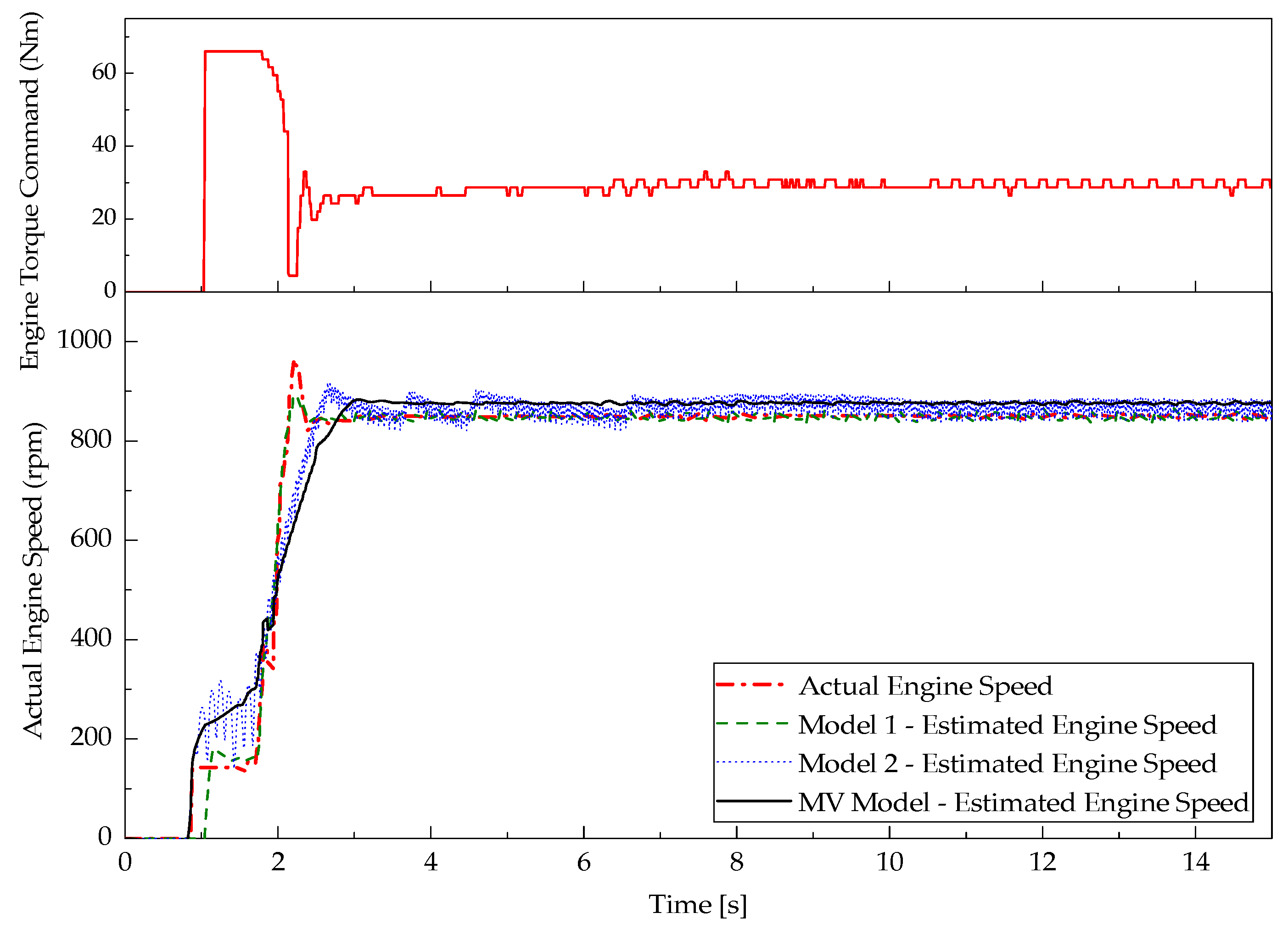
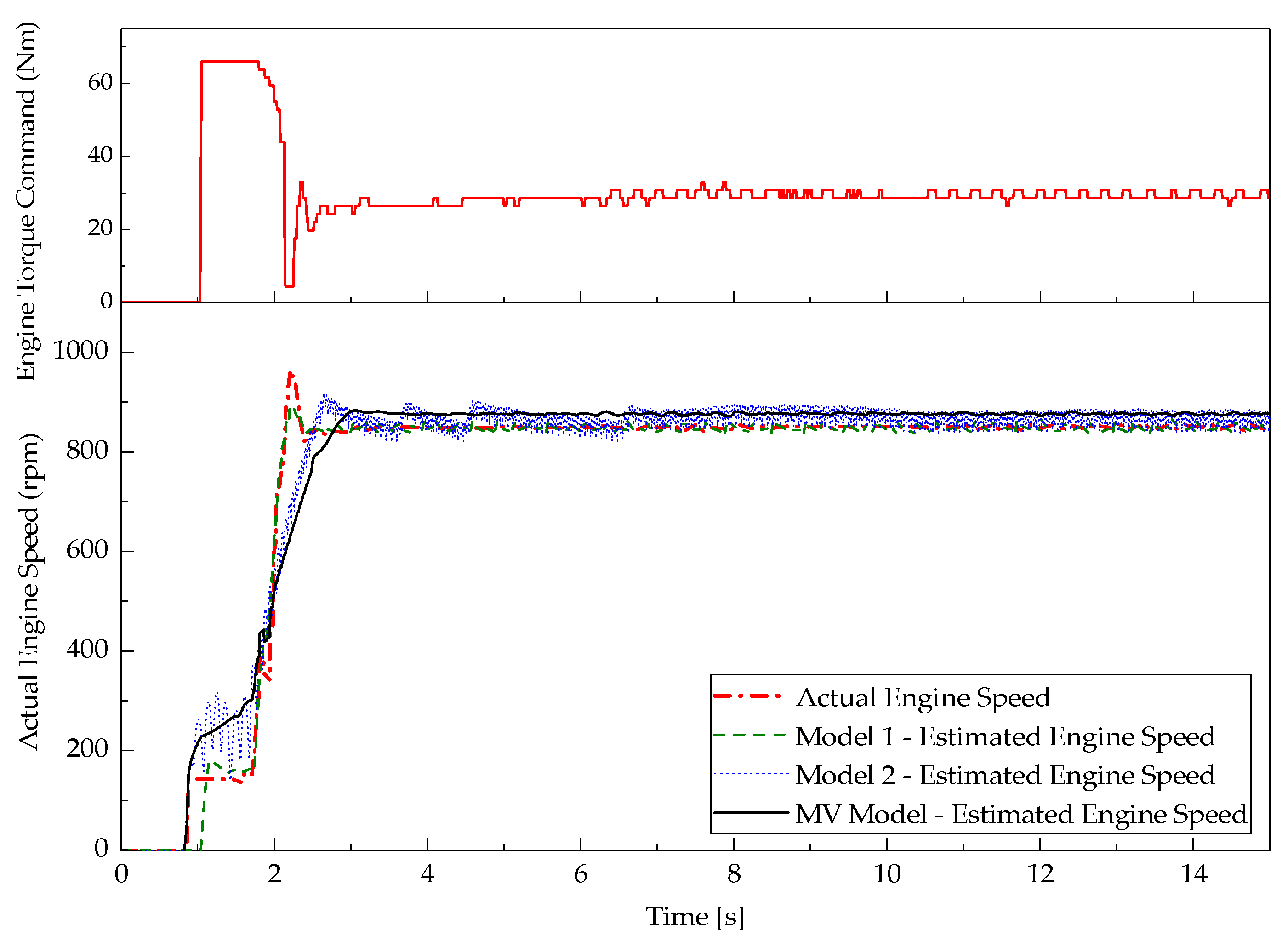
5.1. Powertrain Model Validation
5.2. Excavator Tracking Control Simulations
5.2.1. Test Case Definition and Simulation Setup
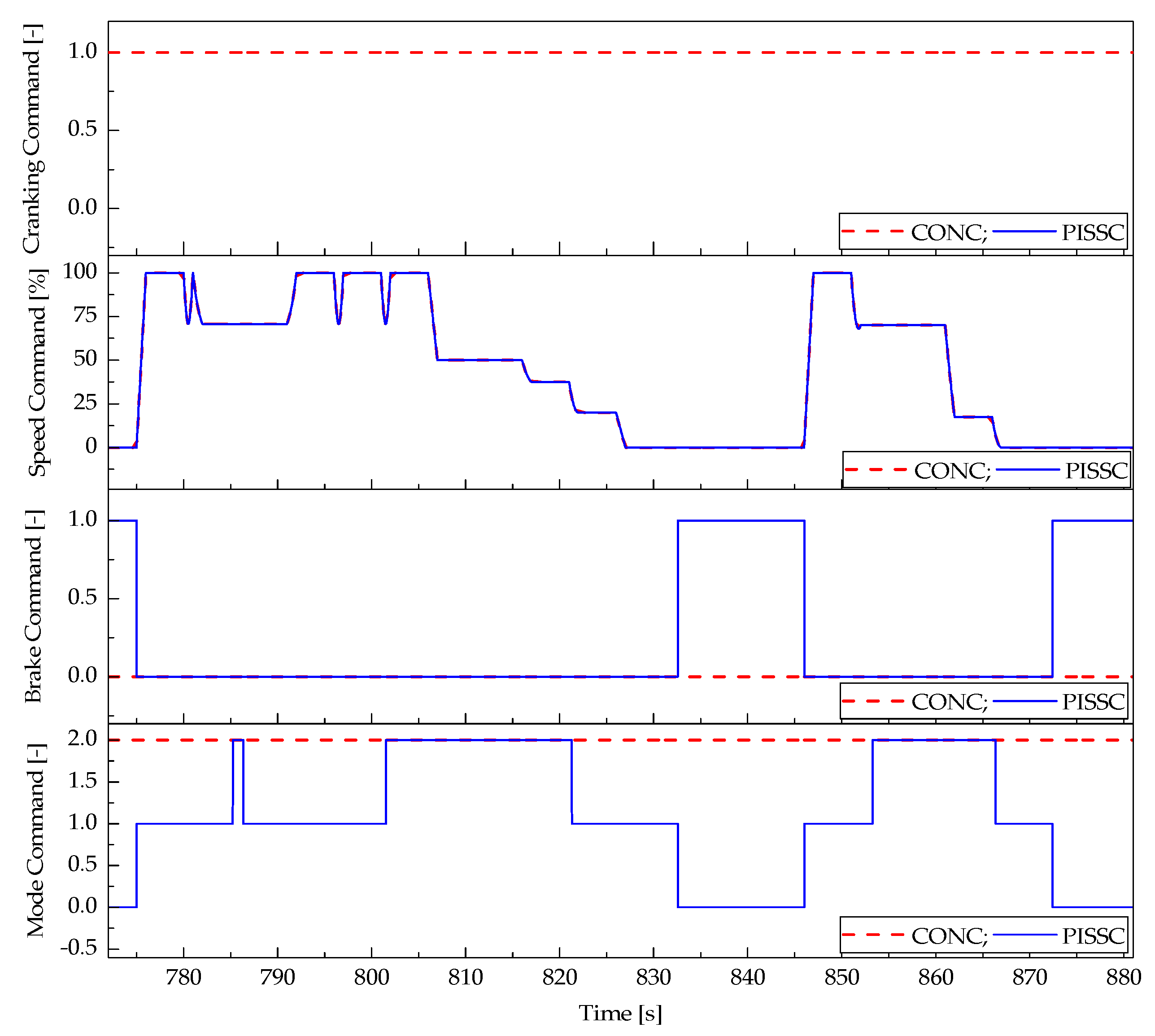
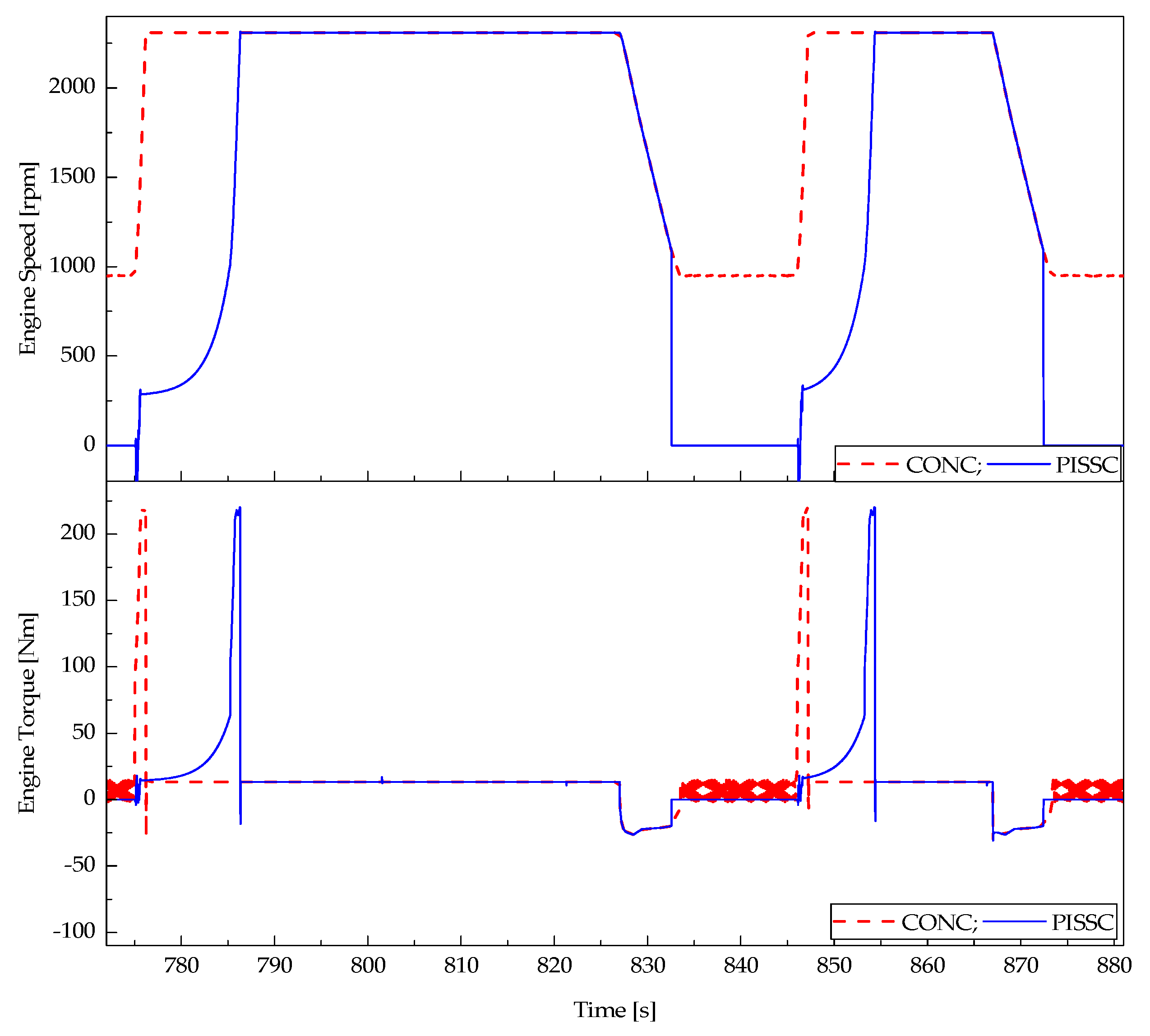
- Conventional controller, tagged as CONC: contains only the simple engine speed control logics of the traditional excavator without idle-stop-start function. Once the machine is running under the simulated loading condition using the equivalent load torque, the engine is always on, and its output power is driven by the HMI commands.
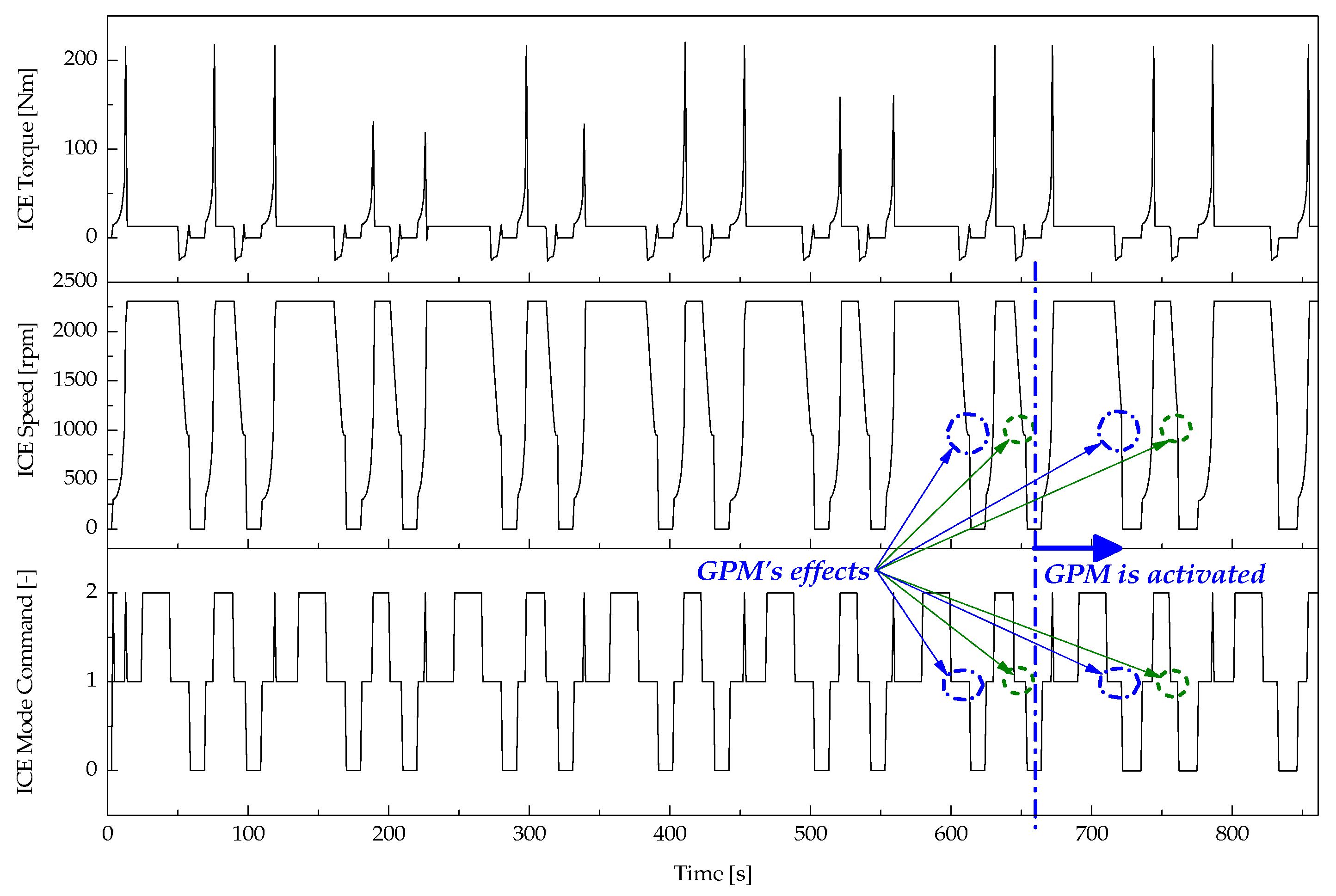
- Proposed controller, PISSC, developed in Section 4: contains not only the logics of the CONC but also prediction-based ISS function. Once the machine is running, the ICE output power is driven by the HMI commands while the ICE mode is controlled by the ISS function to maximize the fuel efficiency of the ICE. The ICE mode prediction is inactive during the first n working cycles (Section 4.3, selected as n = 6) in order to observe enough historical timestamp data to support the prediction.
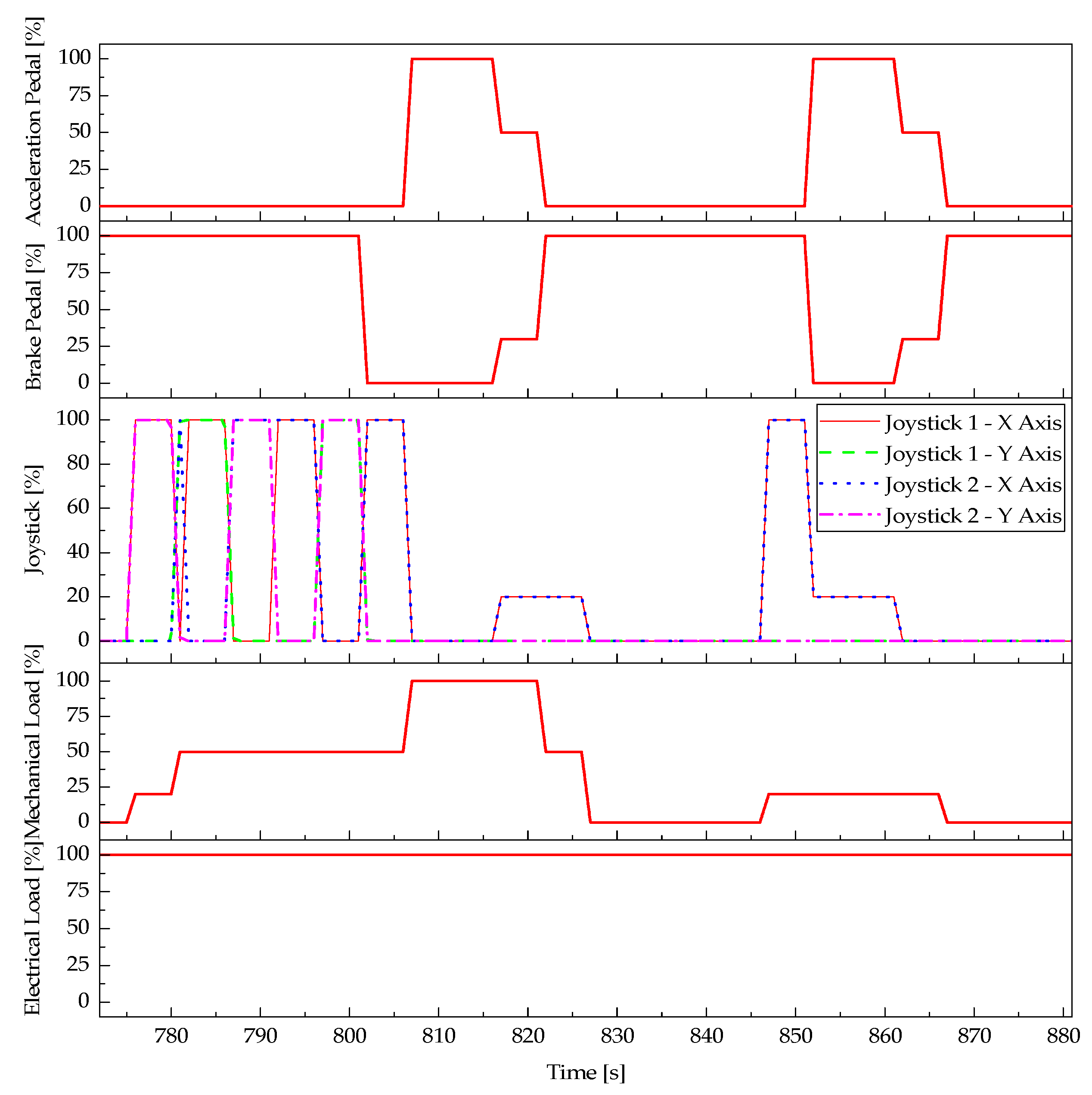
- Both these controllers receive the commands from the joysticks and pedals and then converted them into speed command, normalized within range 0 to 1, and brake command, with on/off logic only, of the ICE as follows ( corresponds to the maximum speed command):where: k1 and k2 are the conversion gains which can be varied through different machine types and by different manufacturers. In this case, the gain are both set to 0.5. These ICE speed and brake commands are then sent to the ECU to regulate the output power of the engine.
- Sampling rate is set to 0.01 s.
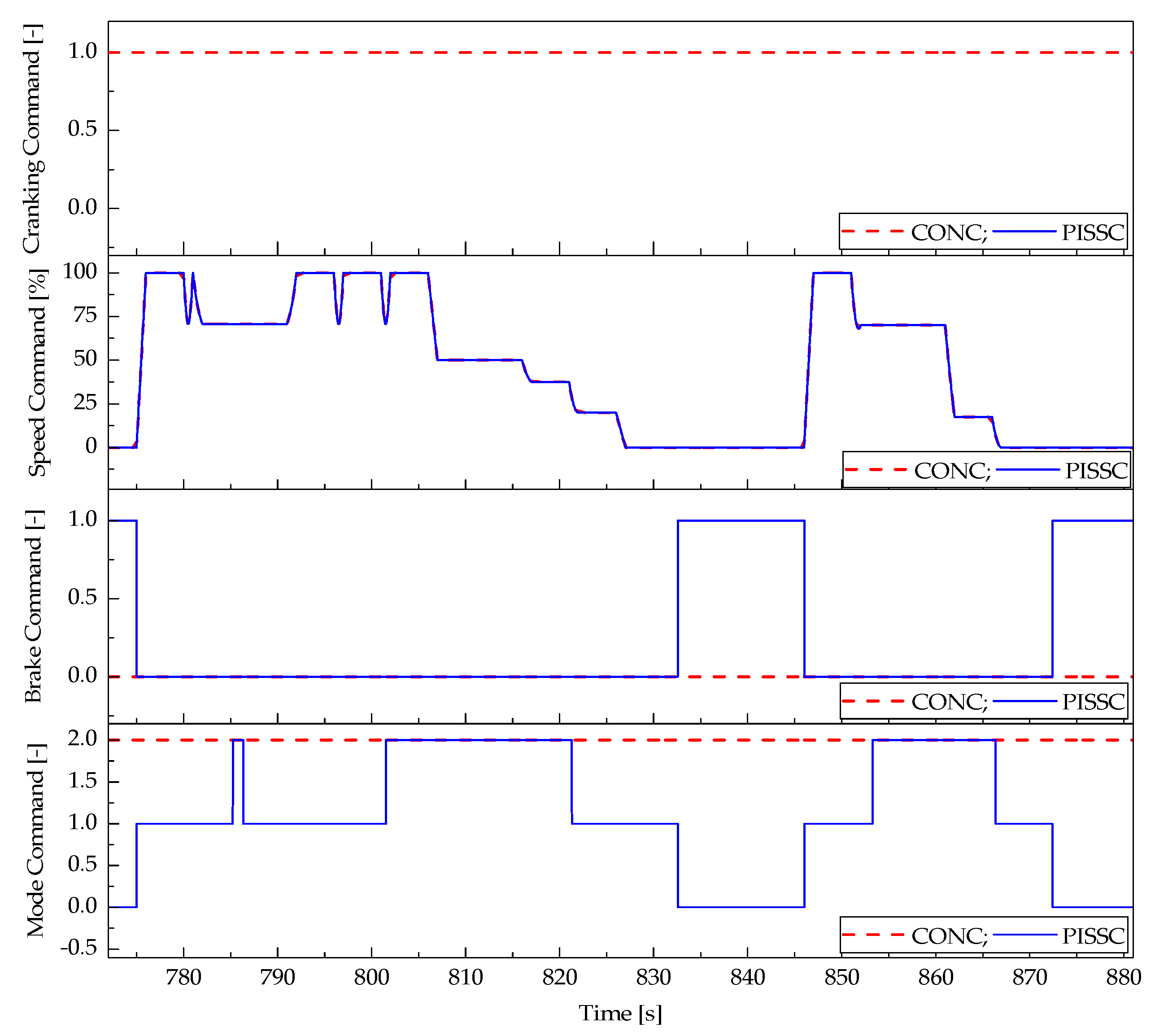
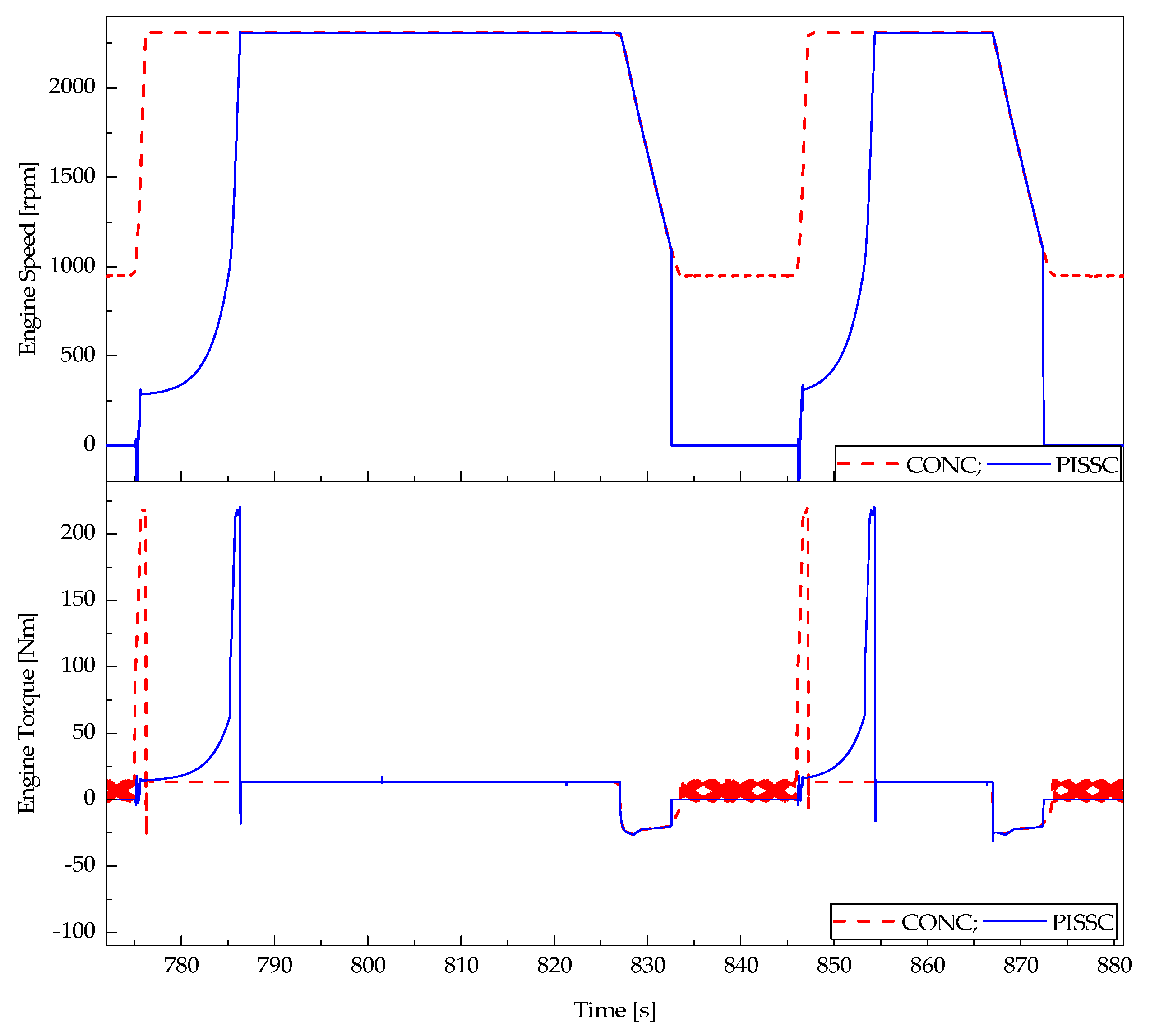
5.2.2. Simulation Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Albers, J.; Meissner, E.; Shirazi, S. Lead-acid batteries in micro-hybrid vehicles. J. Power Source 2011, 196, 3993–4002. [Google Scholar] [CrossRef]
- Canova, M.; Guezennec, Y.; Yurkovich, S. On the control of engine start/stop dynamics in a hybrid electric vehicle. J. Dyn. Syst. Meas. Control 2009, 131, 061005. [Google Scholar] [CrossRef]
- Fontaine, C.; Delprat, S.; Guerra, T.M.; Paganelli, S.; Duguey, J.F. Improving micro hybrid vehicles performances with the maximum principle. IFAC Proc. Vol. 2011, 18, 9727–9732. [Google Scholar] [CrossRef]
- Ozdemir, A.; Mugan, A. Stop-Start System Integration to Diesel Engine and System Modelling and Validation. IFAC Proc. Vol. 2013, 46, 95–100. [Google Scholar] [CrossRef]
- Rafiei, A.; Ghodsi, M.; Al-Yahmedi, A. Smart stop-start strategy for samand micro-hybrid based on traffic qualification. In Proceedings of the 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 1187–1192. [Google Scholar]
- Rizoug, N.; Feld, G.; Bouhali, O.; Mesbahi, T. Micro-hybrid vehicle supplied by a multi-source storage system (battery and supercapacitors): Optimal power management. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD), Manchester, UK, 8–10 April 2014; pp. 1–5. [Google Scholar]
- Schaeck, S.; Stoermer, A.O.; Hockgeiger, E. Micro-hybrid electric vehicle application of valve-regulated lead–acid batteries in absorbent glass mat technology: Testing a partial-state-of-charge operation strategy. J. Power Source 2009, 190, 173–183. [Google Scholar] [CrossRef]
- Dinh, T.Q.; Marco, J.; Greenwood, D.; Harper, L.; Corrochano, D. Powertrain modelling for engine stop–start dynamics and control of micro/mild hybrid construction machines. IMechE Part K J. Multi-Body Dyn. 2017, in press. [Google Scholar] [CrossRef]
- Park, K.S.; Kim, S.I.; Jeong, H.J. Low Idle Control System of Construction Equipment and Automatic Control Method Thereof. U.S. Patent US2013/0289834 A1, 31 October 2013. [Google Scholar]
- Frellch, T.A.; Michael, S. Autoadaptive Engine Idle Speed Control. U.S. Patent US2014/0053801 A1, 27 Februry 2014. [Google Scholar]
- Holt, G.D.; Edwards, D.J. Analysis of united kingdom off-highway construction machinery market and its consumers using new-sales data. J. Constr. Eng. Manag. 2013, 139, 529–537. [Google Scholar] [CrossRef]
- Lewis, P.; Leming, M.; Rasdorf, W. Impact of engine idling on fuel use and CO2 emissions of nonroad diesel construction equipment. J. Manag. Eng. 2012, 28, 31–38. [Google Scholar] [CrossRef]
- Livelink: Latest Technology to Help Manage Your Fleet. Available online: https://gunn-jcb.com/aftermarket/livelink/ (accessed on 7 July 2017).
- Matsumoto, I.; Nishida, H. Internal Combustion Engine Having Solenoid-Operated Valves and Control Method. U.S. Patent US6332446 B1, 25 December 2001. [Google Scholar]
- Deng, J.L. Control problem of grey system. Syst. Control Lett. 1982, 1, 288–294. [Google Scholar]
- Dinh, T.Q.; Ahn, K.K.; Nguyen, T.T. Design of an advanced time delay measurement and a smart adaptive unequal interval grey predictor for real-time nonlinear control systems. IEEE Trans. Ind. Electron. 2013, 60, 4574–4589. [Google Scholar]
- Geng, N.; Zhang, Y.; Sun, Y.; Jiang, Y.; Chen, D. Forecasting China’s annual biofuel production using an improved grey model. Energies 2015, 8, 12080–12099. [Google Scholar] [CrossRef]
- Dinh, T.Q.; Ahn, K.K. An accurate signal estimator using a novel smart adaptive grey model SAGM(1,1). Expert Syst. Appl. 2012, 39, 7611–7620. [Google Scholar]
- Kim, D.; Goh, T.; Park, M.; Kim, S. Fuzzy sliding mode observer with grey prediction for the estimation of the state-of-charge of a lithium-ion battery. Energies 2015, 8, 12409–12428. [Google Scholar] [CrossRef]
- Zeng, F.; Cheng, X.; Guo, J.; Tao, L.; Chen, Z. Hybridising human judgment, AHP, grey theory, and fuzzy expert systems for candidate well selection in fractured reservoirs. Energies 2017, 10, 447. [Google Scholar] [CrossRef]
- Regional Fuel Prices. Available online: http://www.fleetnews.co.uk/costs/fuel-prices/ (accessed on 7 July 2017).
- Truitt, P. Potential for Reducing Greenhouse Gas Emissions in the Construction Sector; USA Environmental Protection Agency: Washington, DC, USA, 2009.
- Phillips, D. The Changing Structure of the Global Construction Equipment Industry; Off-Highway Research: Frankfurt, Germany, 2013; Available online: http://bub.vdma.org/documents/105686/790347/2013-01%20Philips.pdf/92096e4f-98f1-4560-8412-4f2d72fd8cfd (accessed on 1 April 2017).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (% Total Run Time; % Total Fuel Use) of ICE | Engine Speed (rpm) | |||||||
|---|---|---|---|---|---|---|---|---|
| 0–1000 | 1000–1250 | 1250–1500 | 1500–1750 | 1750–2000 | 2000–2250 | 2250–2500 | ||
| Torque % of Reference Value | 66–100 | 0.00; 0.00 | 0.00; 0.00 | 0.01; 0.03 | 0.00; 0.04 | 0.00; 0.00 | 0.00; 0.00 | 0.00; 0.00 |
| 60–66 | 0.00; 0.00 | 0.00; 0.02 | 0.10; 0.32 | 0.23; 0.86 | 0.01; 0.09 | 0.00; 0.00 | 0.00; 0.00 | |
| 54–60 | 0.00; 0.00 | 0.07; 0.16 | 0.30; 0.80 | 0.68; 2.40 | 0.46; 1.83 | 0.01; 0.10 | 0.00; 0.00 | |
| 48–54 | 0.02; 0.04 | 0.27; 0.52 | 0.50; 1.19 | 0.52; 1.55 | 0.87; 3.28 | 0.41; 1.67 | 0.01; 0.04 | |
| 42–48 | 0.21; 0.26 | 0.43; 0.74 | 0.54; 1.18 | 0.57; 1.55 | 0.32; 1.03 | 0.52; 2.00 | 0.24; 0.96 | |
| 36–42 | 0.48; 0.50 | 0.75; 1.17 | 0.65; 1.26 | 0.59; 1.40 | 0.35; 0.98 | 0.21; 0.67 | 0.40; 1.44 | |
| 30–36 | 1.36; 1.32 | 1.46; 1.97 | 1.07; 1.80 | 0.81; 1.63 | 0.44; 1.05 | 0.28; 0.75 | 0.69; 2.17 | |
| 24–30 | 2.72; 2.30 | 2.24; 2.51 | 1.72; 2.39 | 0.91; 1.53 | 0.53; 1.04 | 0.32; 0.73 | 0.98; 2.62 | |
| 18–24 | 8.05; 5.60 | 3.84; 3.49 | 1.93; 2.18 | 1.38; 1.86 | 0.72; 1.13 | 0.36; 0.66 | 0.88; 1.88 | |
| 0–18 | 42.48; 17.34 | 6.77; 3.59 | 2.91; 2.22 | 1.99; 2.01 | 1.05; 1.38 | 0.54; 0.98 | 0.79; 1.77 | |
| Influential Factor | Compact Excavator  | Heavy Excavator  | Telescopic Handler  | Backhoe Loader  |
|---|---|---|---|---|
| Total idling time over total machine run time | Medium-Low | High | High | Medium |
| Total fuel in idle over total fuel consumption | Medium-Low | High | High | Medium |
| Amount of fuel spent in idle | Low | High | High | Medium |
| Technical ease of installation | Easy | Medium | Difficult | Medium |
| Payback time | Short | Medium | Medium-Long | Long |
| Machine potential in market | High | High | High | Medium |
| Component | Specifications |
|---|---|
| Belt transmission | Transmission ratio 2.8:1 |
| Pinion-ring gear transmission | Transmission ratio 11:1 |
| Flywheel mass 44.7 kg | |
| Engine | Four-stroke diesel engine 1.9 L Max speed 2400 rpm Gross power 41 kW, net power 38.4 kW Compression ratio 16.7:1 |
| Starter | 12 V working voltage 2 kW power |
| Alternator | Current 80 A |
| Battery | Lead-acid battery 12 V nominal voltage 75 Ah capacity |
| Signal | Description | Range | Unit | Actual Range & [Actual Unit] |
|---|---|---|---|---|
| Key | Key even by operator with three position: Off (0)-On (1)-Ignition (2) | 0-1-2 (Integer) | - | 0-1-2 [-] |
| AP | Acceleration pedal command given by operator | 0~100 (Proportional) | % | 0~100 [-] |
| JX1 | Joystick 1—X command | 0~100 (Proportional) | % | 0~100 [-] |
| JY1 | Joystick 1—Y command | 0~100 (Proportional) | % | 0~100 [-] |
| JX2 | Joystick 2—X command | 0~100 (Proportional) | % | 0~100 [-] |
| JY2 | Joystick 2—Y command | 0~100 (Proportional) | % | 0~100 [-] |
| BP | Brake pedal command given by operator | 0~100 (Proportional) | % | 0~100 [-] |
| Elec Load | Equivalent electrical loads of machine | 0~100 (Proportional) | % | 0~Max electrical load [W] |
| Mech Load | Equivalent mechanical load torque on ICE shaft | 0~100 (Proportional) | % | 0~Max simulated load torque [Nm] |
| Env Temp | Environment temperature | 20 (Constant) | °C | 20 [°C] |
| Cool Temp | Coolant temperature | 60 (Constant) | °C | 60 [°C] |
| Phase No. | Phase Time Stamp [s] | Machine Key | Mech Load 1 M [%] | Elec Load 2 E [%] | JX1 [%] | JX2 [%] | JY1 [%] | JY2 [%] | AP [%] | BP [%] |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.01 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 3 | 1 | 0 | 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3 | 4 | 2 | 0 | 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| 4 | 5 | 1 | 50 | 100 | 100 | 0 | 100 | 0 | 0 | 50 |
| 5 | 10 | 1 | 50 | 100 | 0 | 100 | 0 | 100 | 0 | 50 |
| 6 | 15 | 1 | 50 | 100 | 100 | 100 | 0 | 0 | 0 | 50 |
| 7 | 20 | 1 | 50 | 100 | 0 | 0 | 100 | 100 | 0 | 50 |
| 8 | 25 | 1 | 50 | 100 | 100 | 100 | 0 | 0 | 0 | 50 |
| 9 | 30 | 1 | 100 | 100 | 0 | 0 | 0 | 0 | 100 | 100 |
| 10 | 40 | 1 | 100 | 100 | 20 | 20 | 0 | 0 | 50 | 100 |
| 11 | 45 | 1 | 50 | 100 | 20 | 20 | 0 | 0 | 0 | 50 |
| 12 | 50 | 1 | 0 | 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| 13 | 70 | 1 | 20 | 100 | 100 | 100 | 0 | 0 | 0 | 20 |
| 14 | 75 | 1 | 20 | 100 | 20 | 20 | 0 | 0 | 100 | 20 |
| 15 | 85 | 1 | 20 | 100 | 0 | 0 | 0 | 0 | 50 | 20 |
| 16 | 90 | 1 | 0 | 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| 17 | 110 | 1 | 20 | 100 | 100 | 0 | 0 | 100 | 0 | 20 |
| 18 | 115 | 1 | 50 | 100 | 0 | 100 | 100 | 0 | 0 | 50 |
| KPI | KPI’s Unit | CONC | PISSC | Notes |
|---|---|---|---|---|
| Stop Count | - | 1 | 13 | Include initial state of ICE |
| Start Count | - | 0 | 12 | Not include 1st ICE start using key |
| Run Time | s | 668.88 | 539.87 | Total ICE run time |
| Stop Time | s | 0.12 | 129.13 | Total ICE stop time |
| Fuel Used | L (Litres) | 2.06 | 0.74 | Total fuel consumed by ICE |
| Fuel Saved | L | 0 | 0.14 | Against no stop-start function |
| Total Fuel Saved | L | 0 | 1.32 | Against CONC’s total fuel used |
| % Total Fuel Saved | % | 0 | 64.08 | Against CONC’s total fuel used |
| Fuel Cost Used | £ (Pound 1) | 2.39 | 0.86 | Total fuel cost for ICE fuel usage |
| Fuel Cost Saved | £ | 0 | 0.16 | Against no stop-start function |
| Total Fuel Cost Saved | £ | 0 | 1.53 | Against CONC’s total fuel cost |
| KPI | KPI’s Unit | CONC | PISSC | Notes |
|---|---|---|---|---|
| Stop Count | - | 0 | 10 | |
| Start Count | - | 0 | 10 | |
| Run Time | s | 553.02 | 414.70 | Total ICE run time |
| Stop Time | s | 0 | 138.32 | Total ICE stop time |
| Stop Time due to GPM | s | 0 | 30.71 | Estimated stop time due to GPM |
| % Stop Time due to GPM | % | 0 | 22.20 | Against total ICE stop time |
| Fuel Used | L | 1.71 | 0.53 | Total fuel consumed by ICE |
| Fuel Saved | L | 0 | 0.15 | Against no stop-start function |
| Total Fuel Saved | L | 0 | 1.18 | Against CONC’s total fuel used |
| % Total Fuel Saved | % | 0 | 69.00 | Against CONC’s total fuel used |
| Fuel Cost Used | £ (1) | 1.98 | 0.61 | Total fuel cost for ICE fuel usage |
| Fuel Cost Saved | £ | 0 | 0.17 | Against no stop-start function |
| Total Fuel Cost Saved | £ | 0 | 1.37 | Against CONC’s total fuel cost |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dinh, T.Q.; Marco, J.; Niu, H.; Greenwood, D.; Harper, L.; Corrochano, D. A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part A: Fundamental Concepts and Design. Energies 2017, 10, 962. https://doi.org/10.3390/en10070962
Dinh TQ, Marco J, Niu H, Greenwood D, Harper L, Corrochano D. A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part A: Fundamental Concepts and Design. Energies. 2017; 10(7):962. https://doi.org/10.3390/en10070962
Chicago/Turabian StyleDinh, Truong Quang, James Marco, Hui Niu, David Greenwood, Lee Harper, and David Corrochano. 2017. "A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part A: Fundamental Concepts and Design" Energies 10, no. 7: 962. https://doi.org/10.3390/en10070962
APA StyleDinh, T. Q., Marco, J., Niu, H., Greenwood, D., Harper, L., & Corrochano, D. (2017). A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part A: Fundamental Concepts and Design. Energies, 10(7), 962. https://doi.org/10.3390/en10070962