Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle




Abstract
:1. Introduction
2. System Modelling
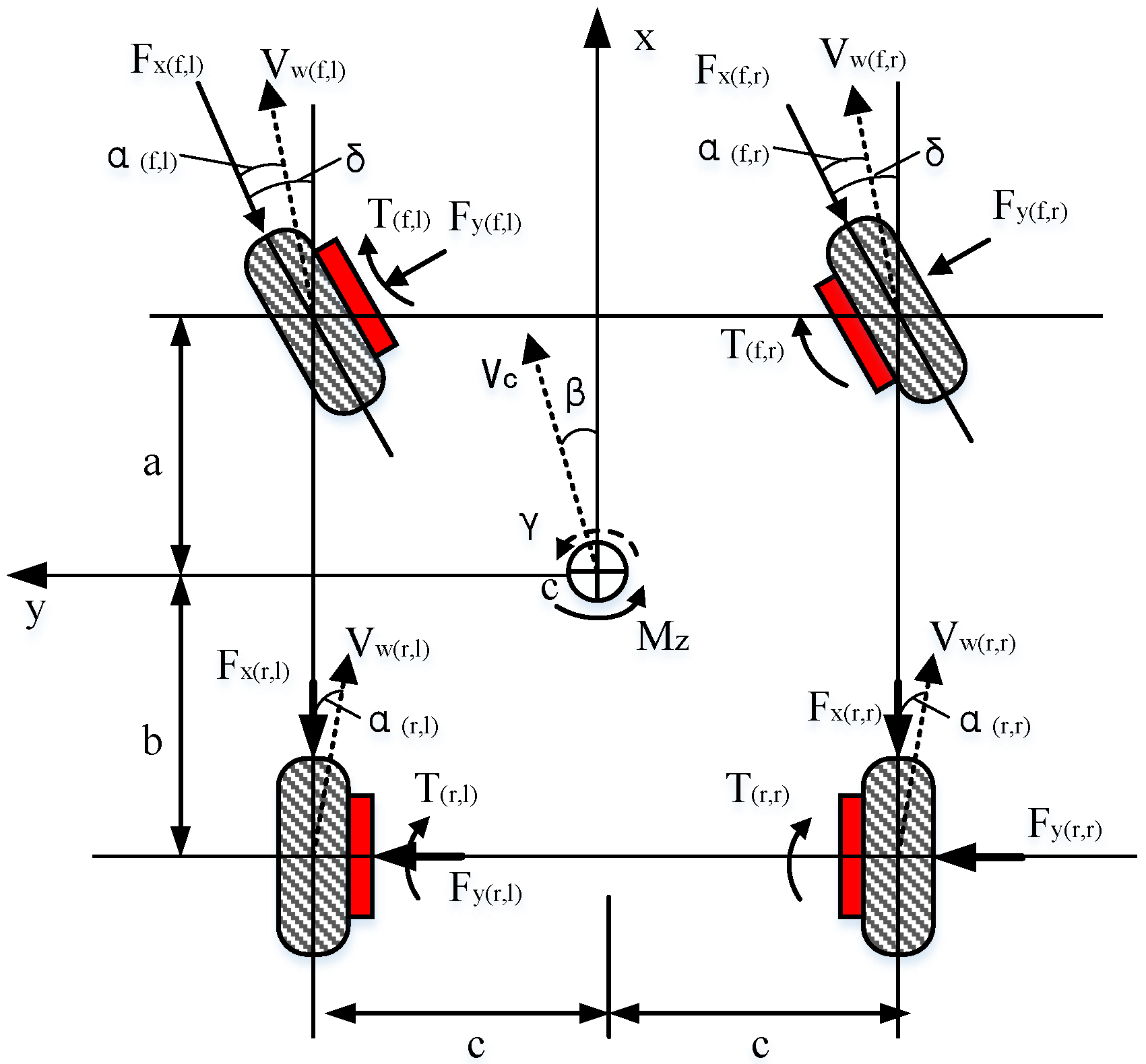
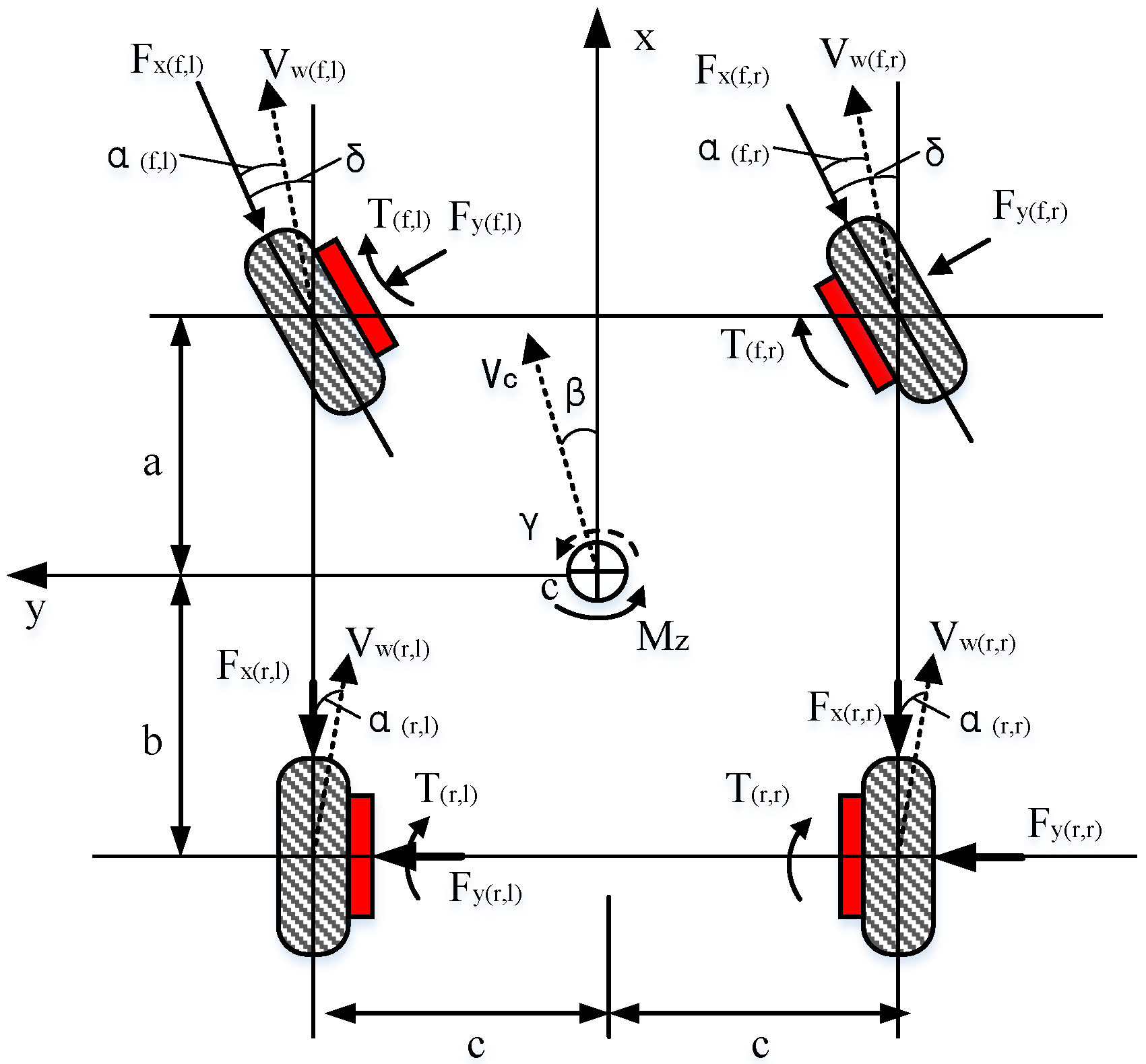
2.1. Vehicle Planar Motion Model
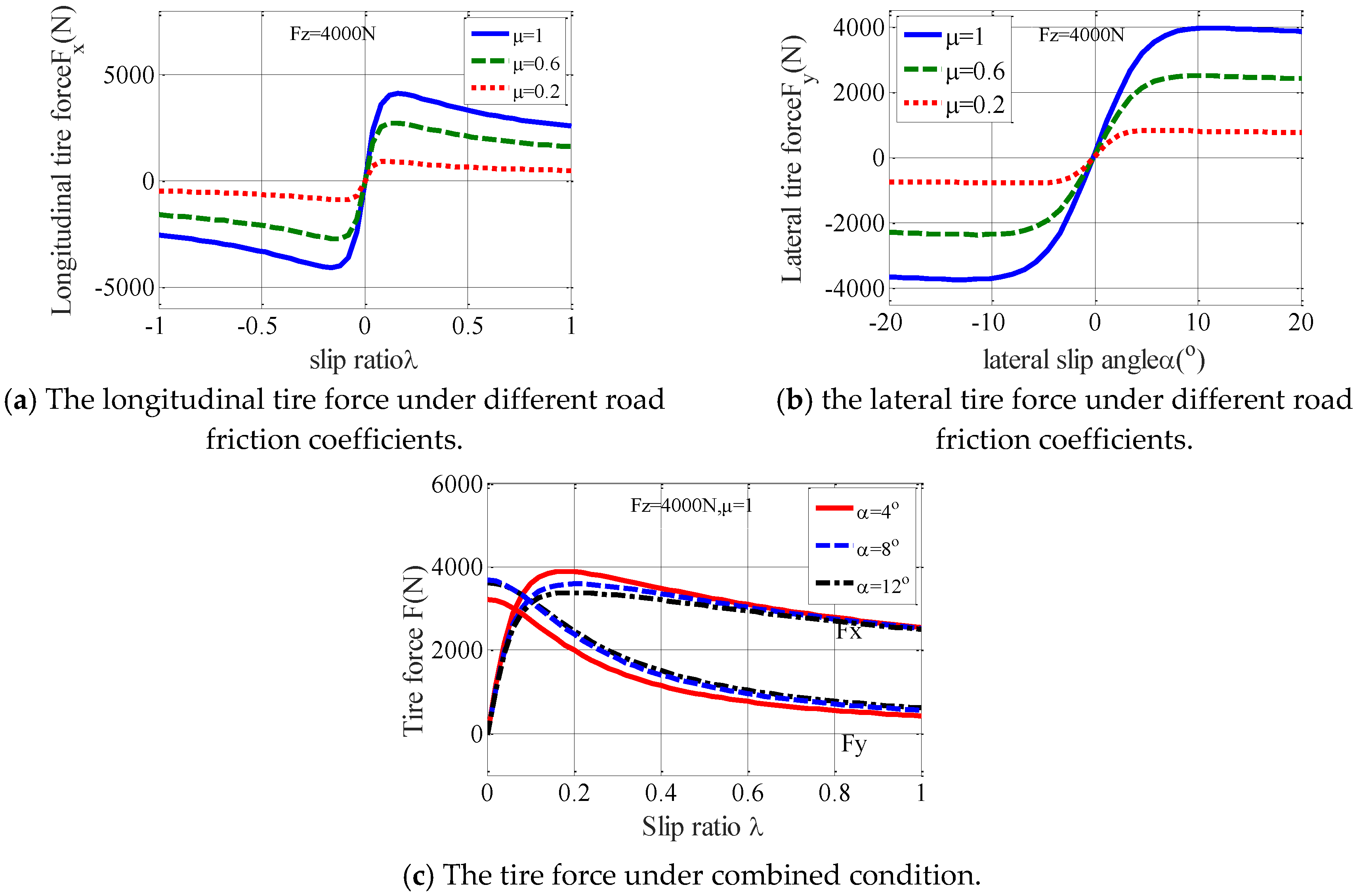
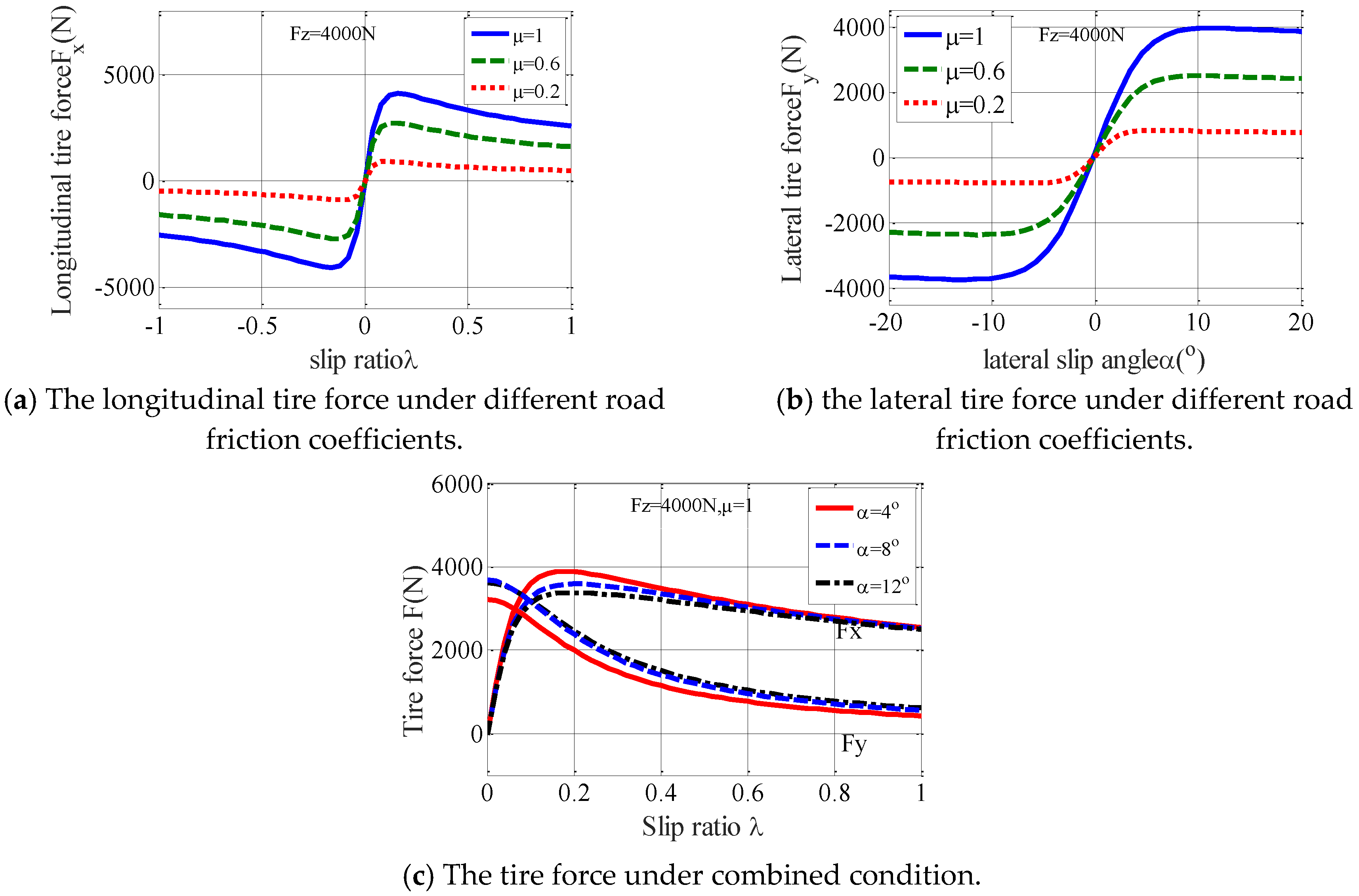
2.2. Tire Model
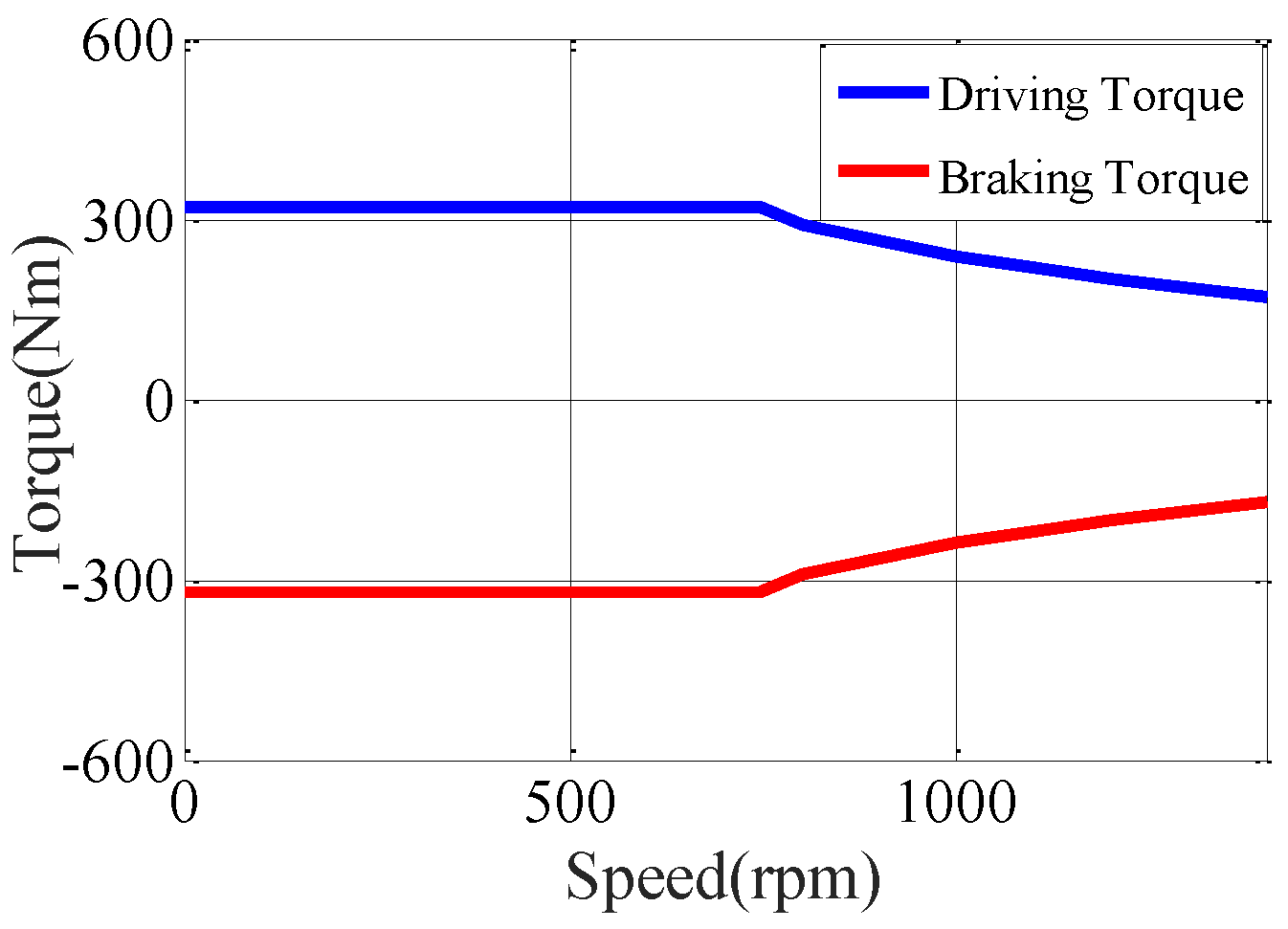
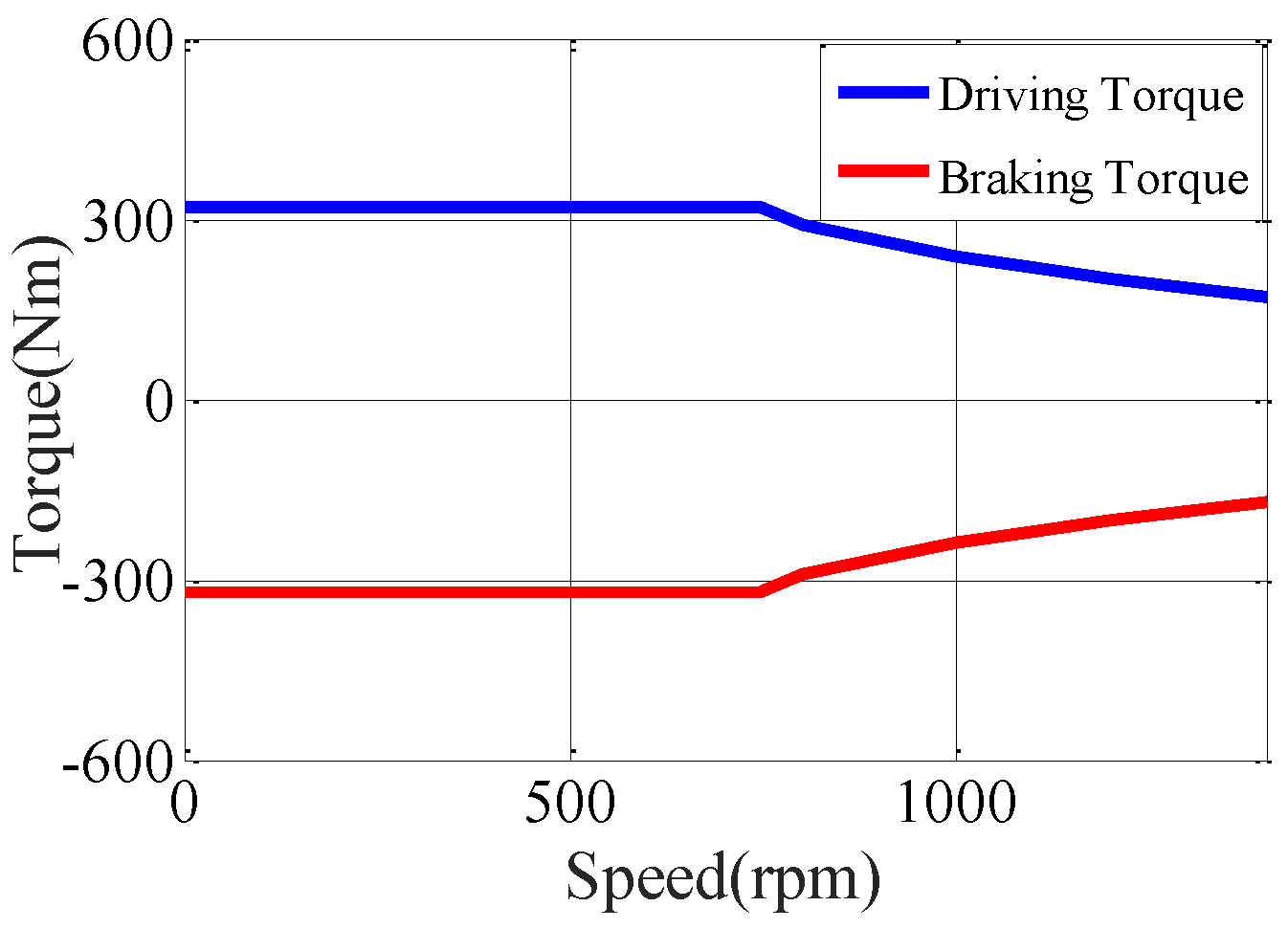
2.3. In-Wheel Motor Model
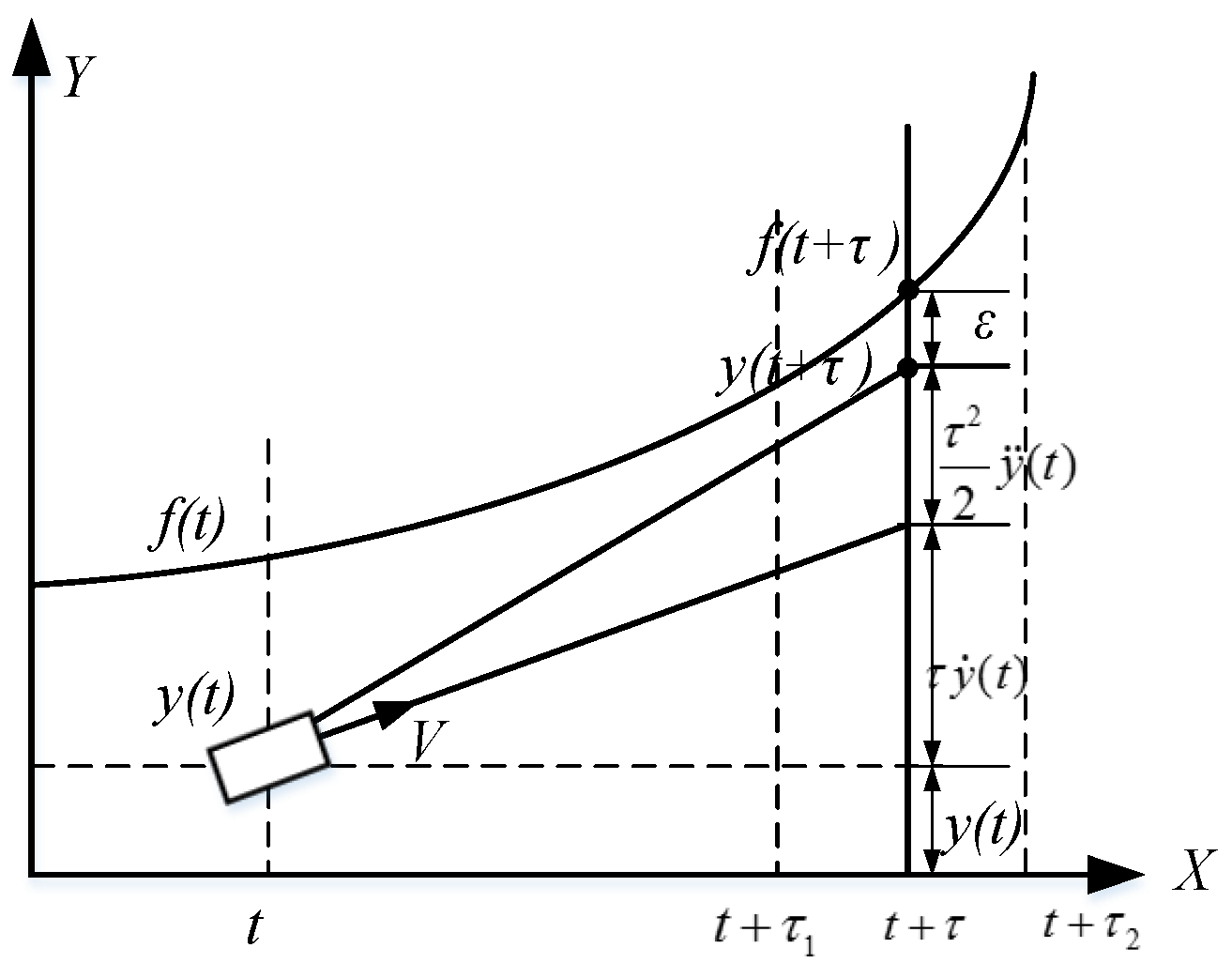
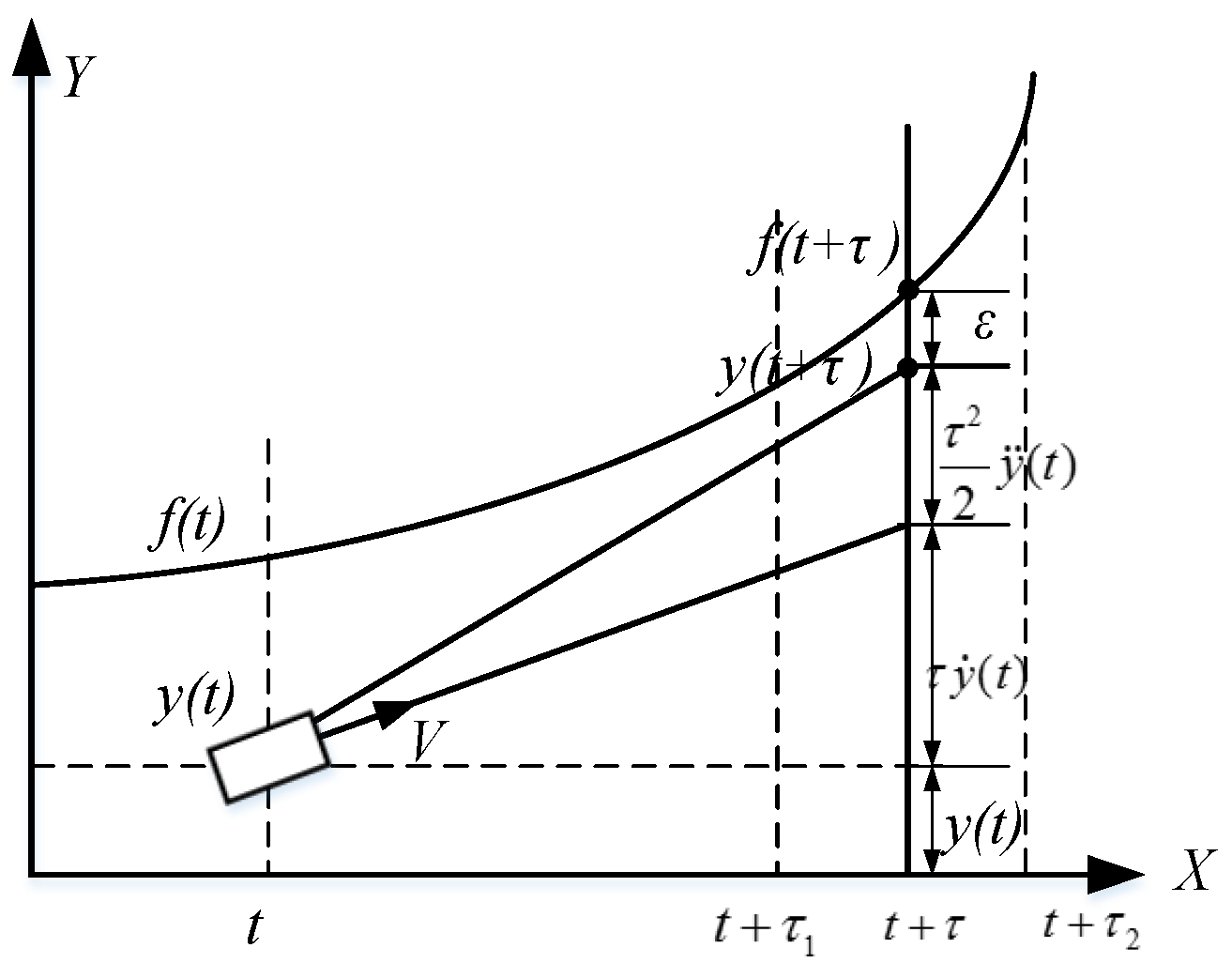
2.4. Driver Model
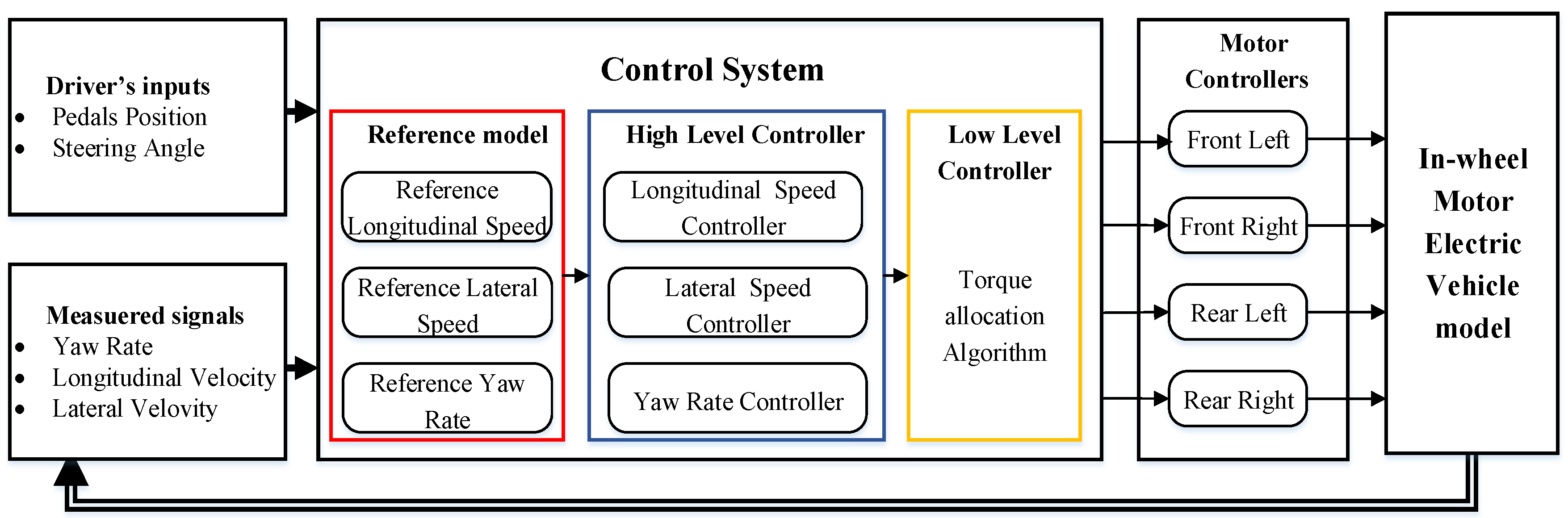
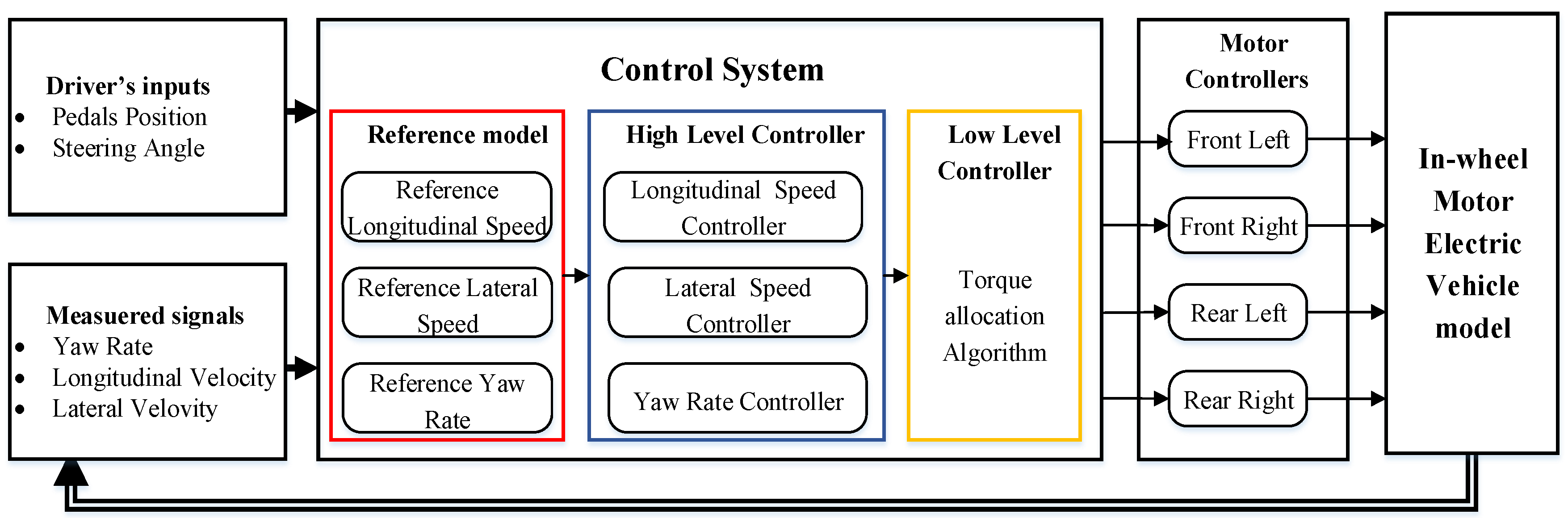
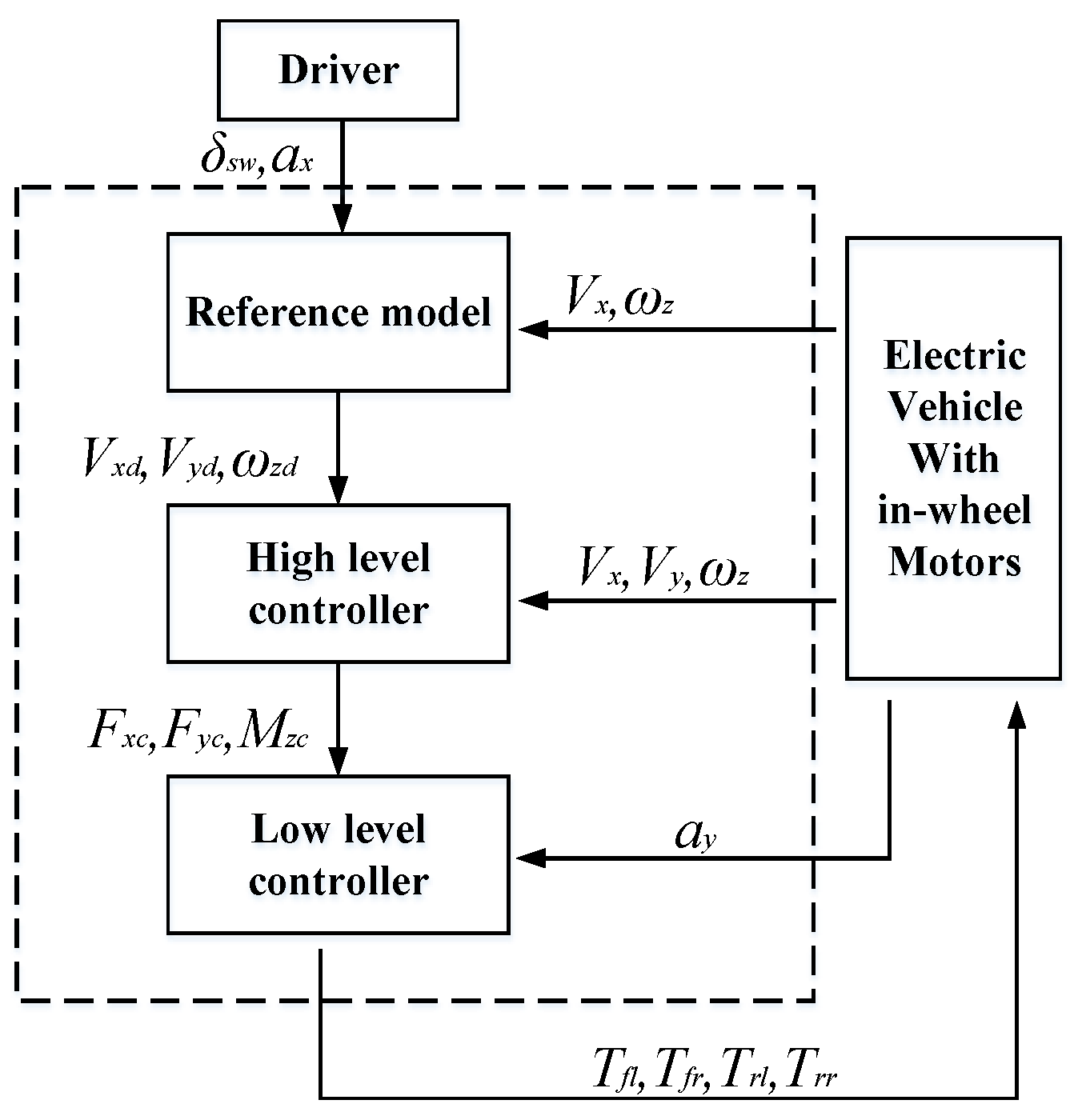
3. Vehicle Dynamics Stability Control Algorithm
3.1. Reference Model
3.2. Upper Layer Controller
3.2.1. Longitudinal Velocity Controller
3.2.2. Lateral Speed Controller
3.2.3. Yaw Rate Controller
3.3. Lower Layer Controller
3.3.1. Dynamic-Load-Based Control
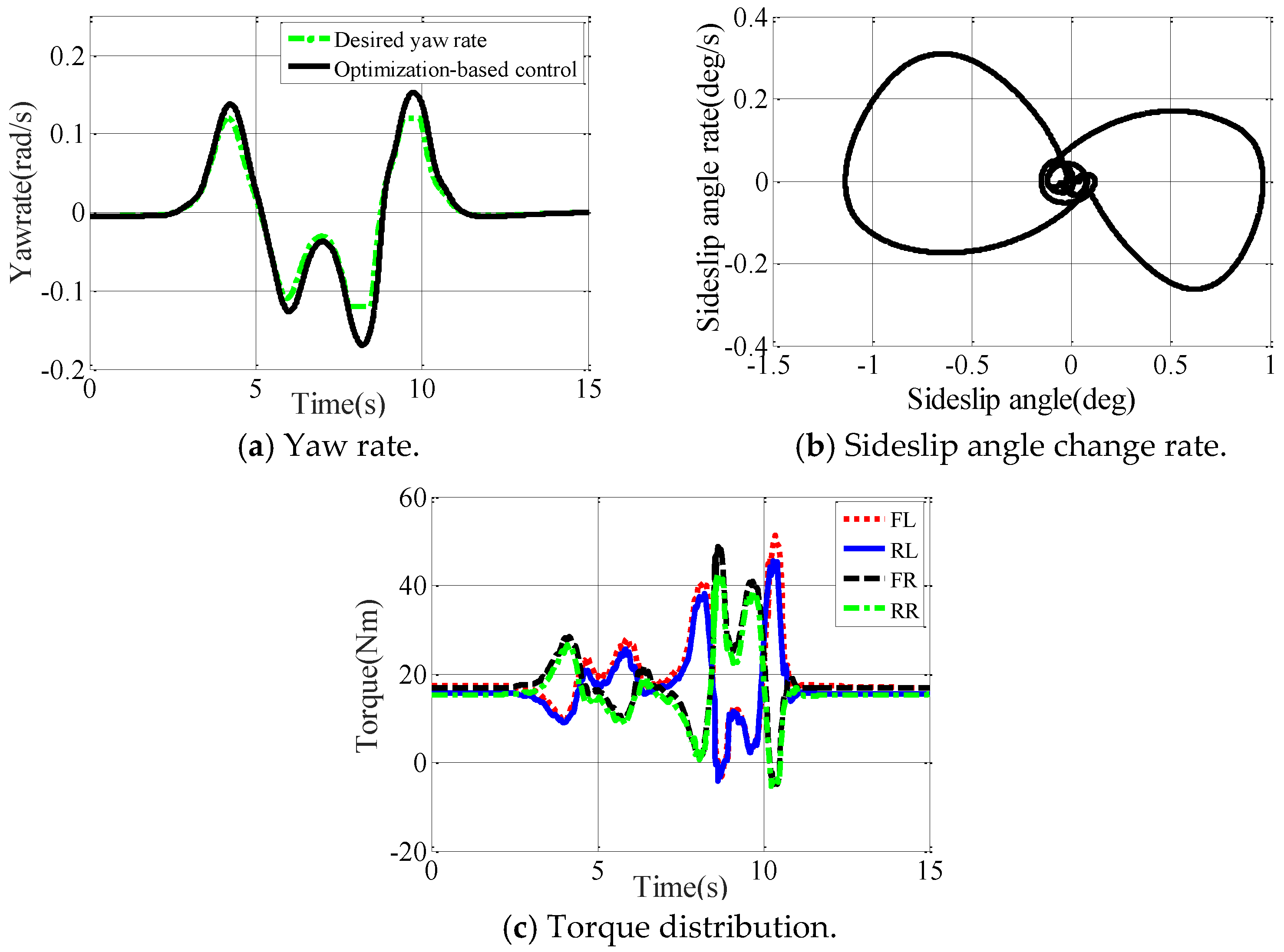
3.3.2. Optimization-Based Control
4. Simulation and Experimental Results
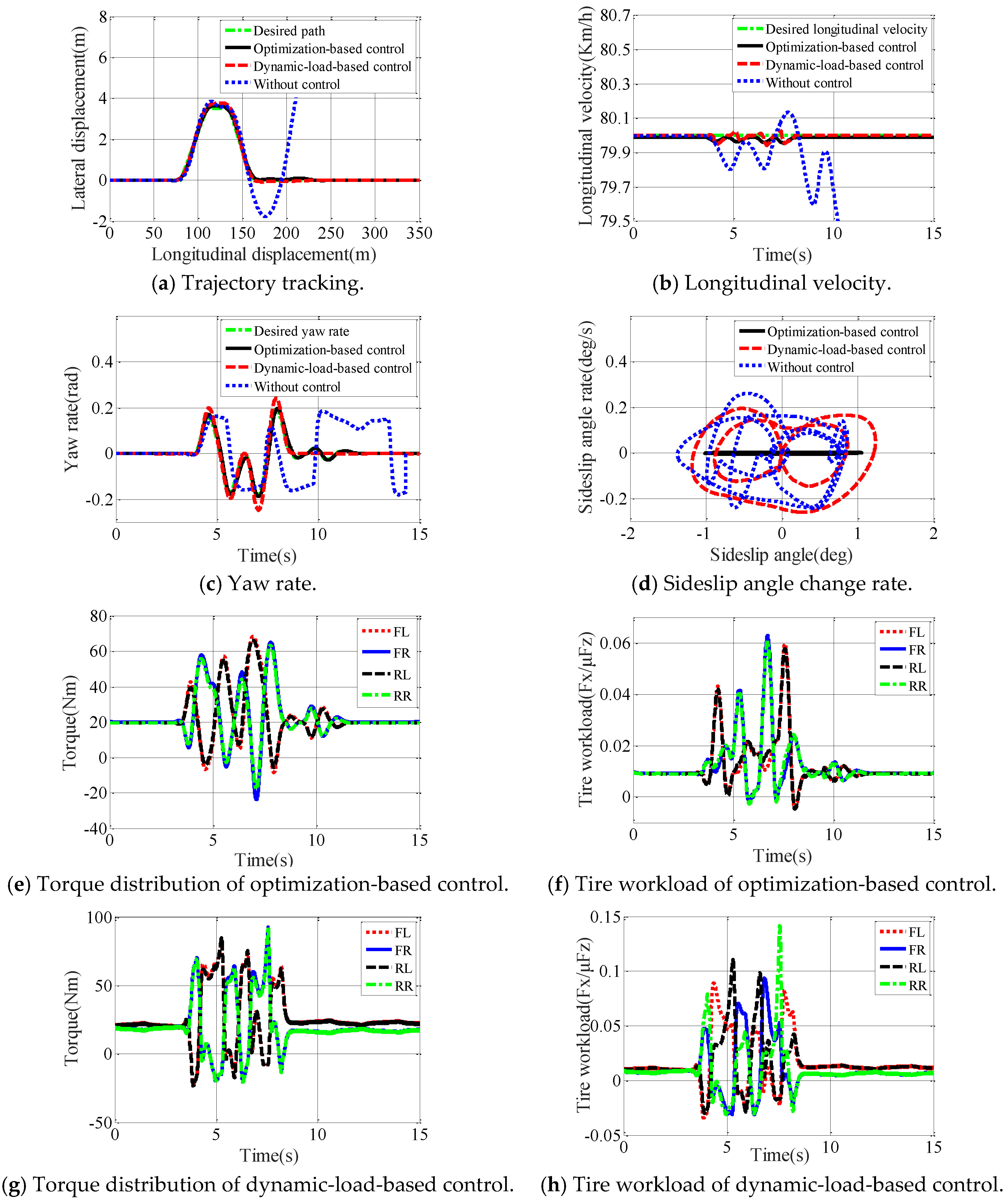
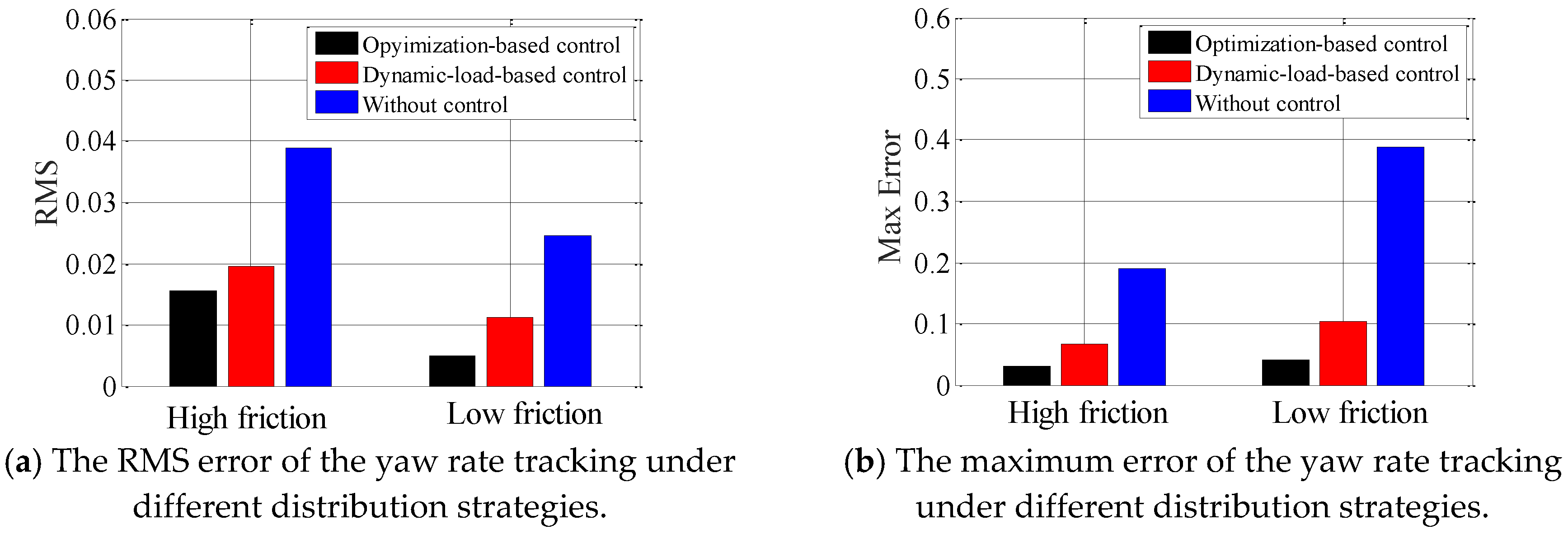
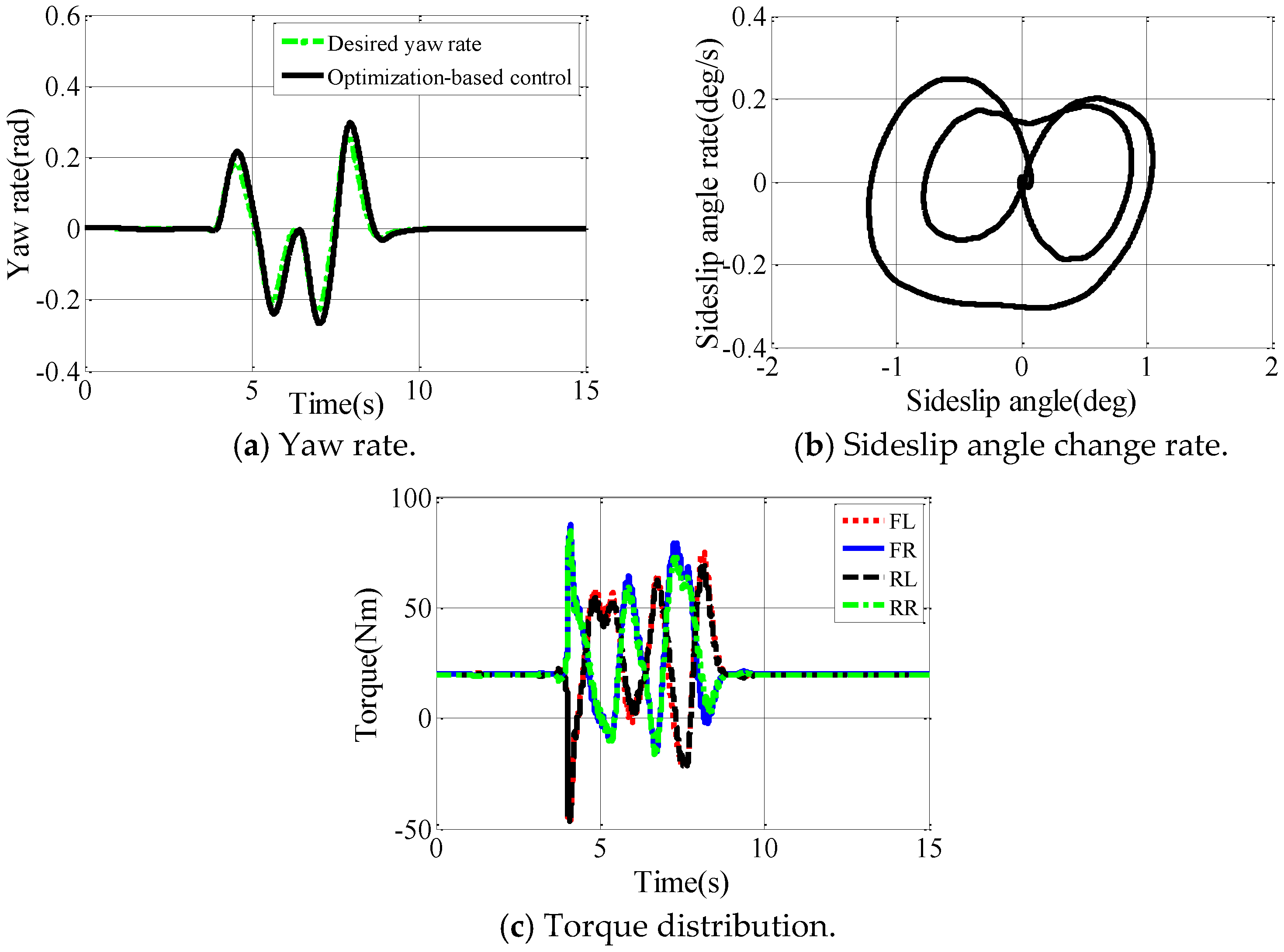
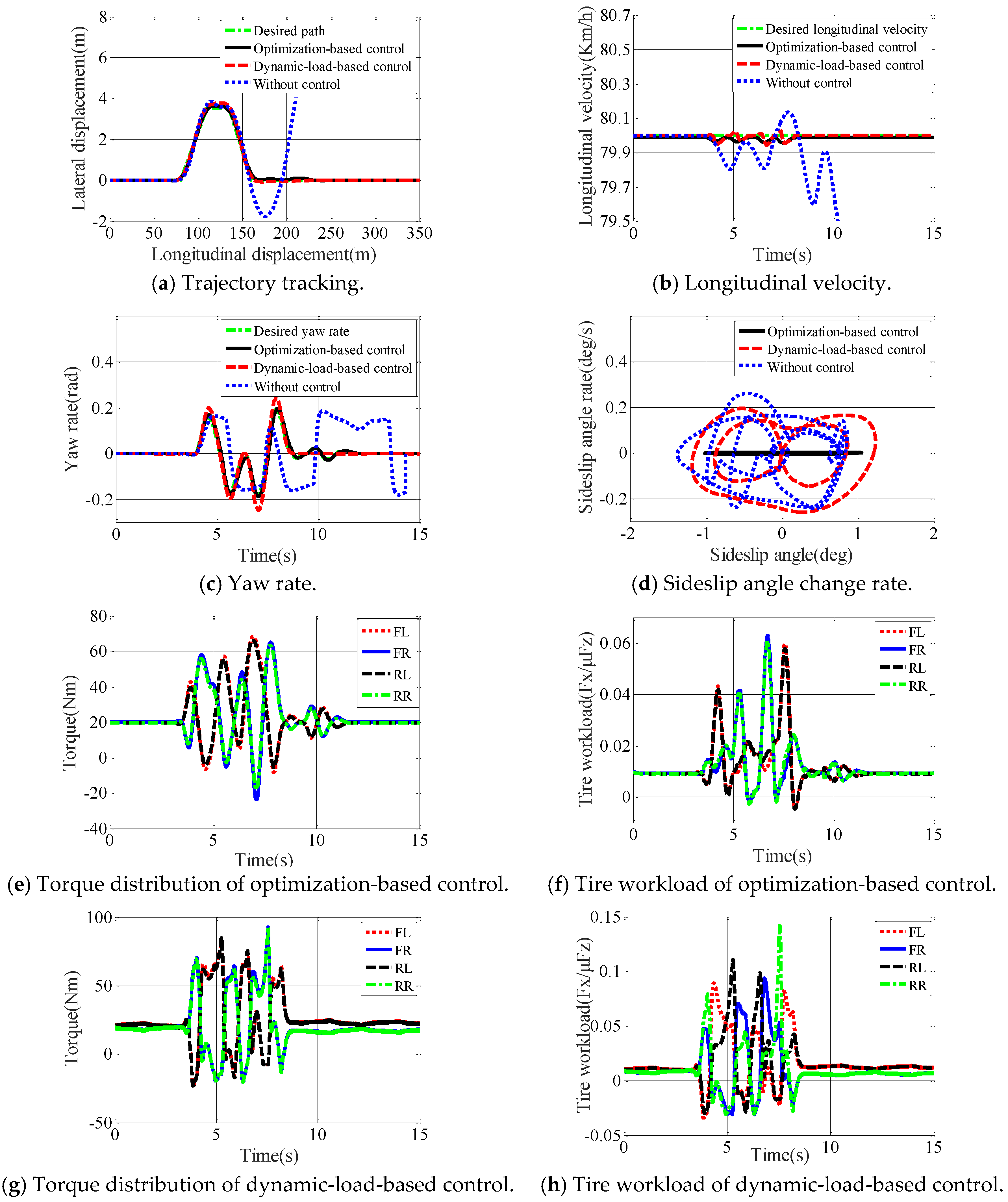
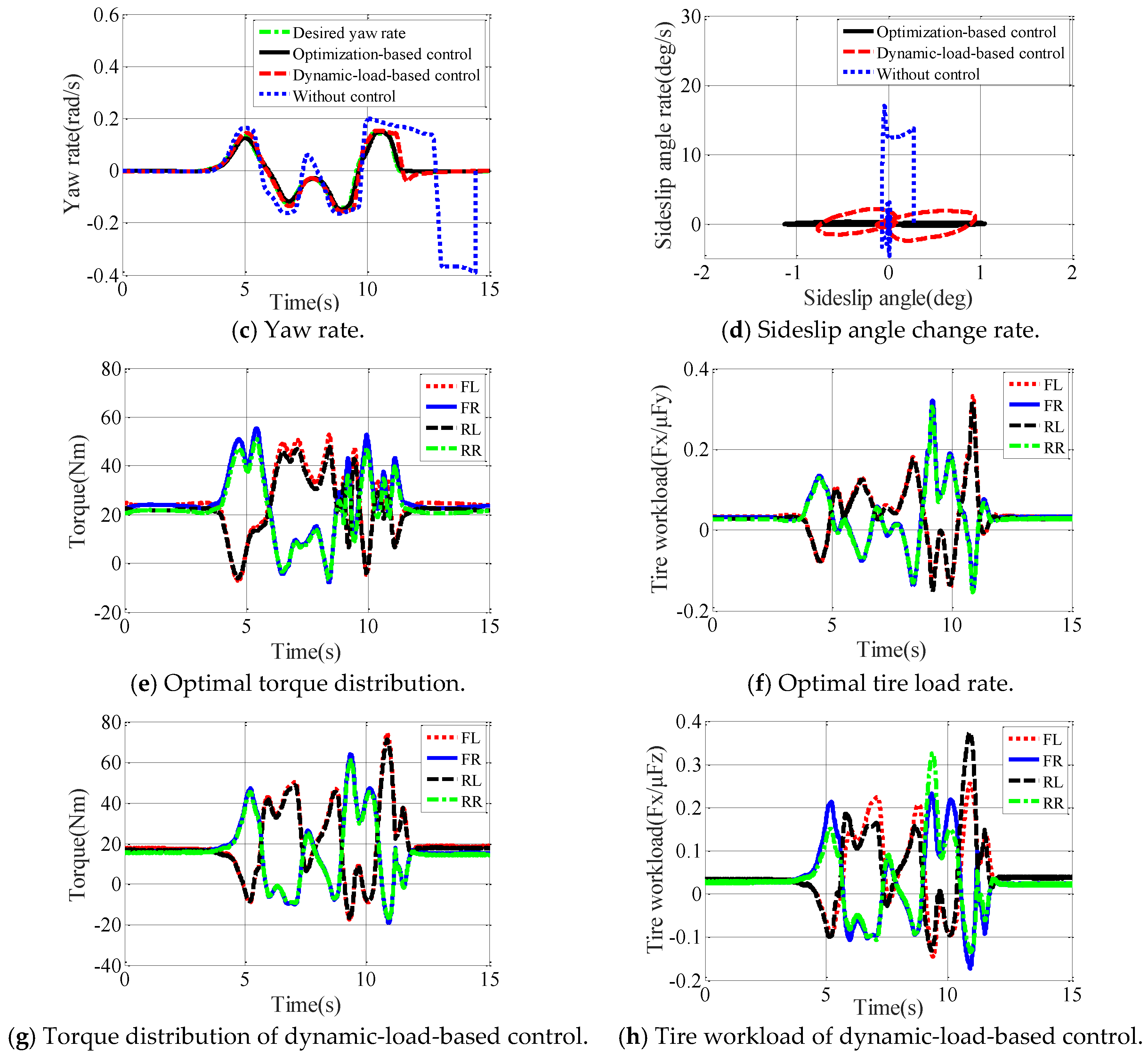
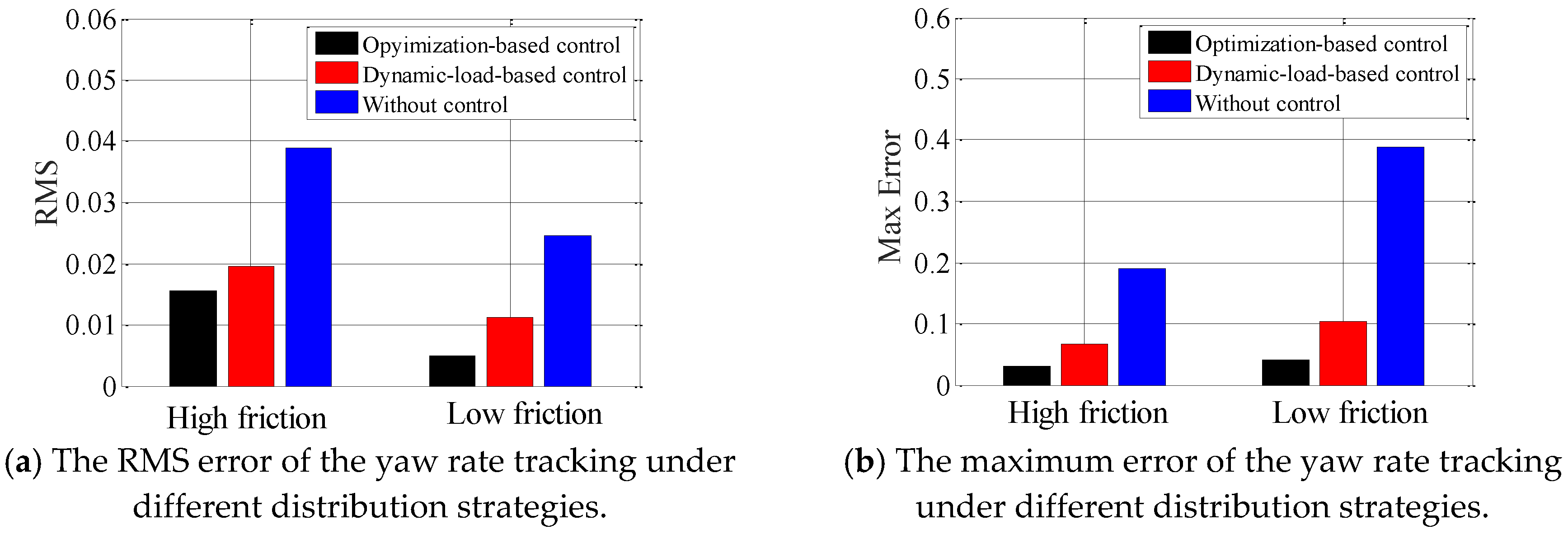
4.1. Double Lane Change Maneuver with High Frictions
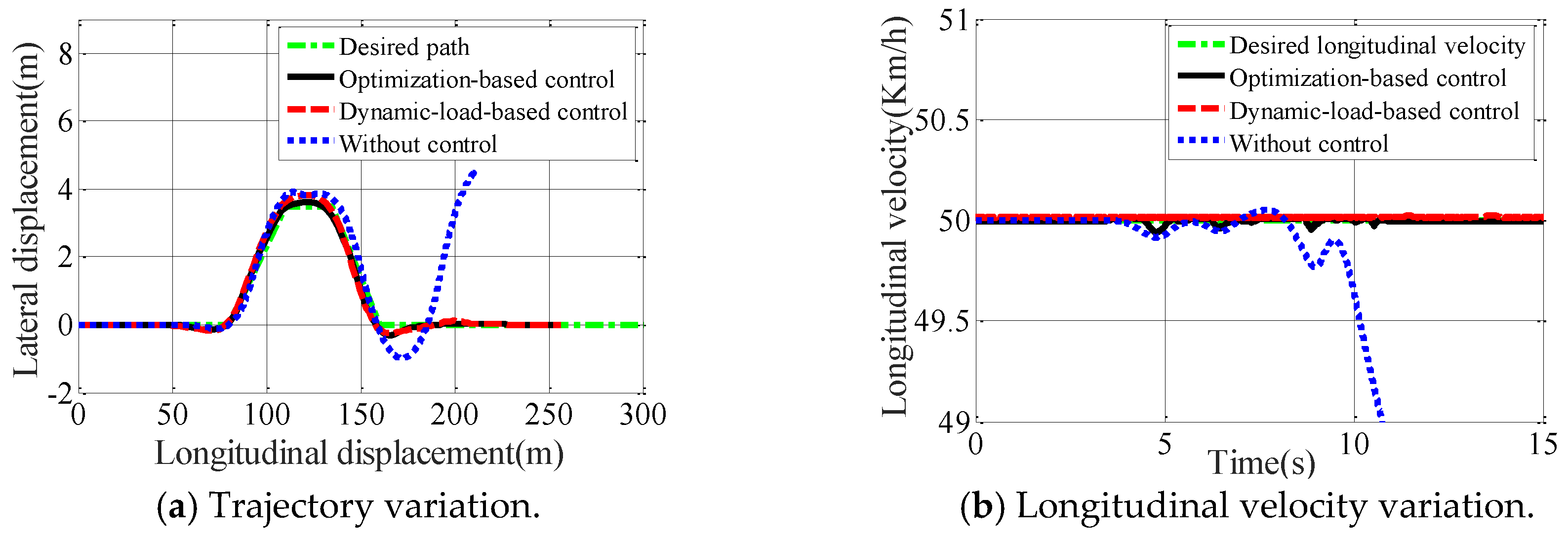
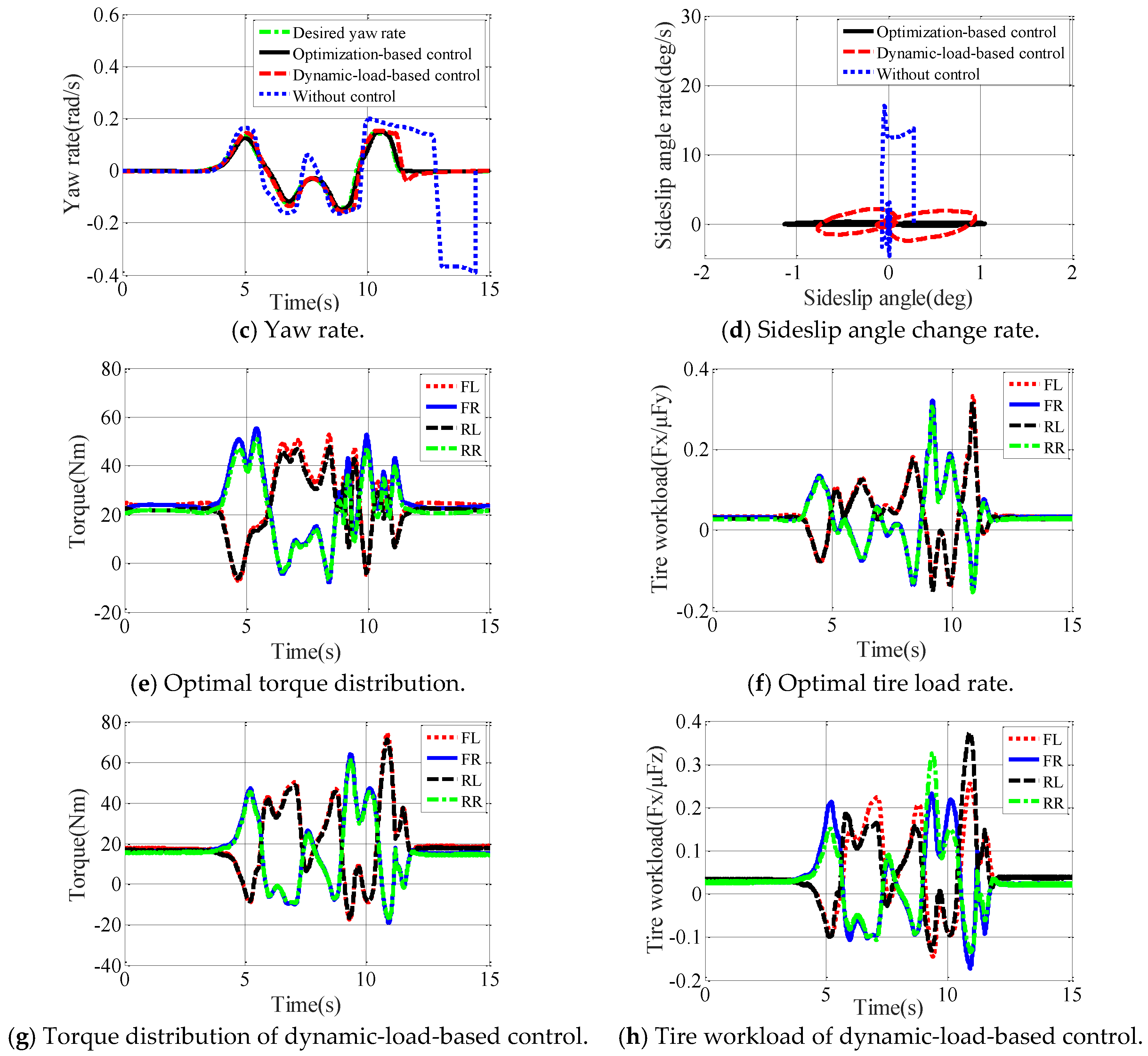
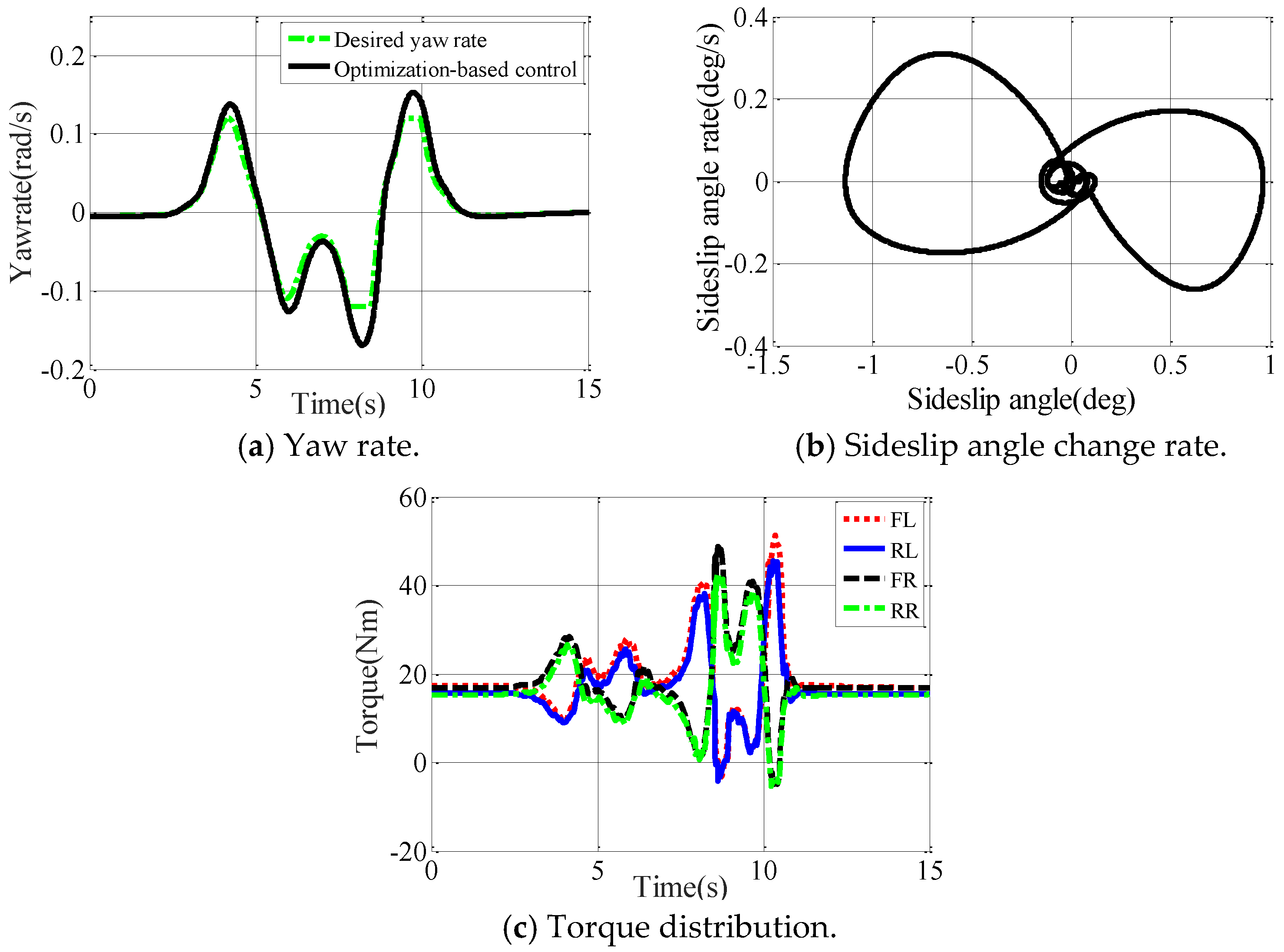
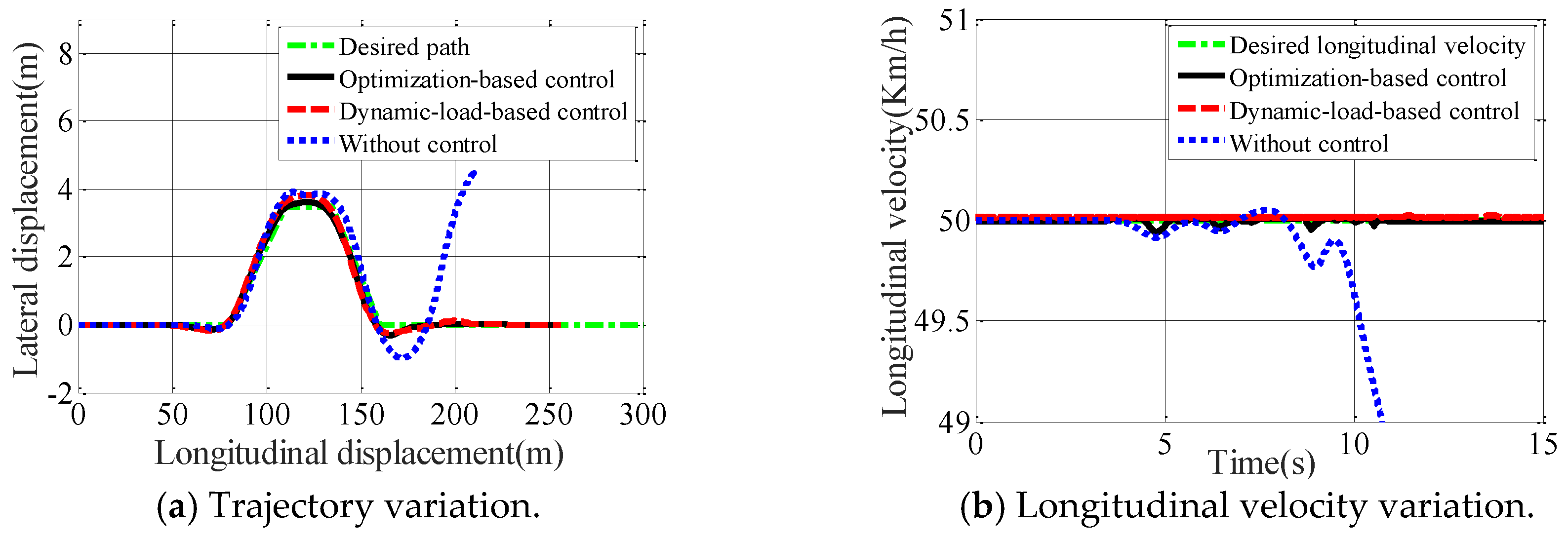
4.2. Double Lane Change Maneuver with Low Friction
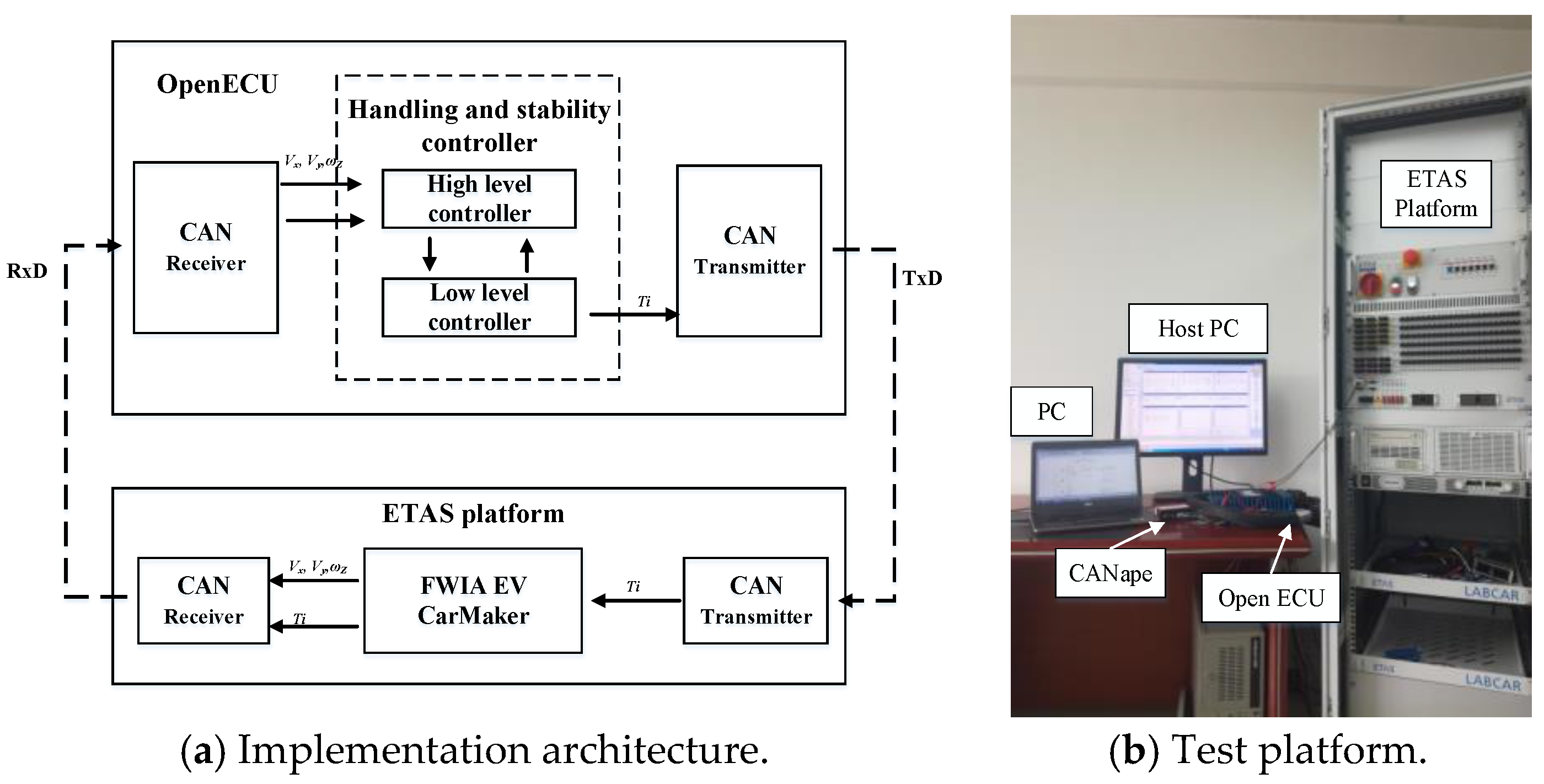
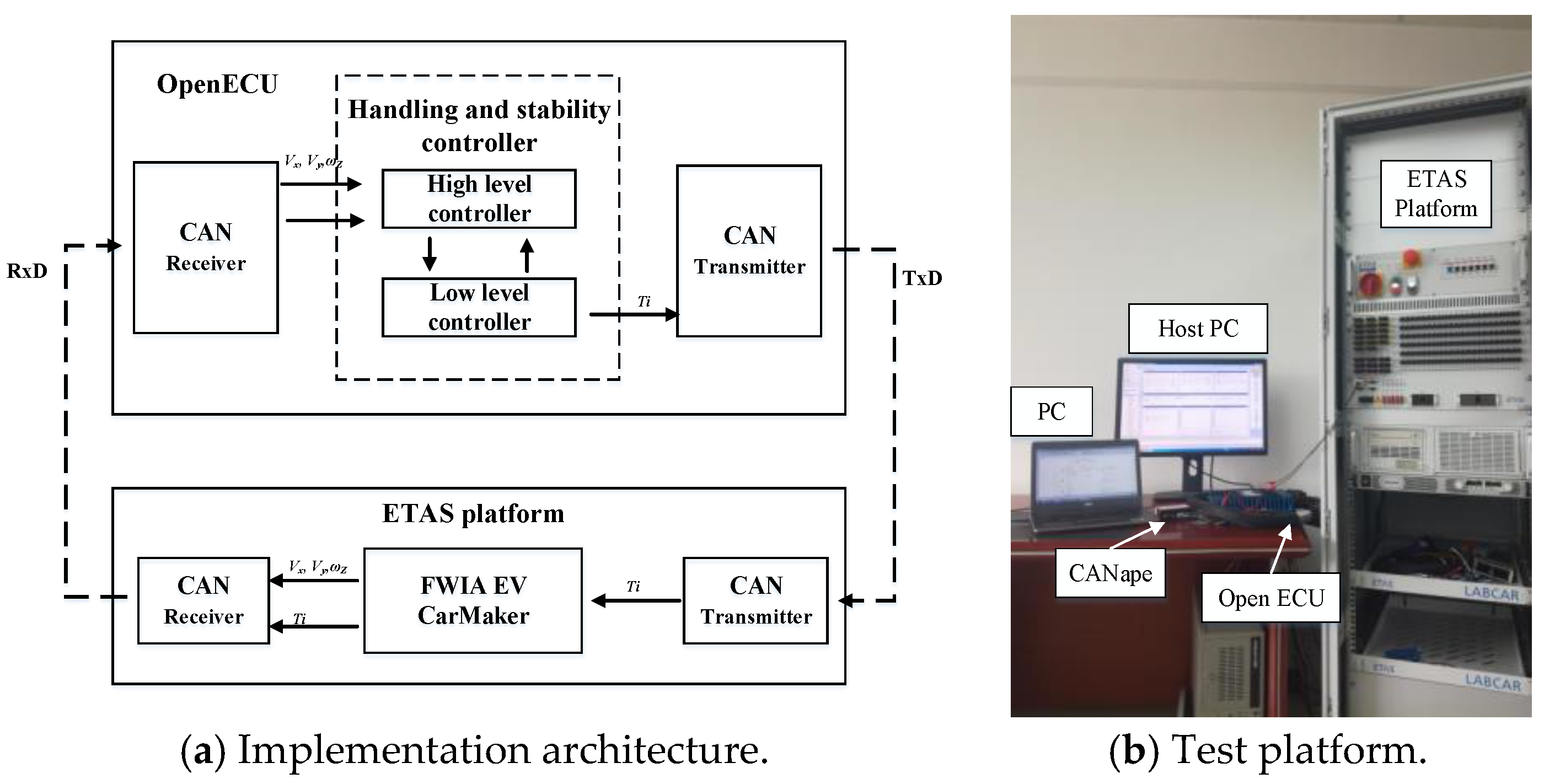
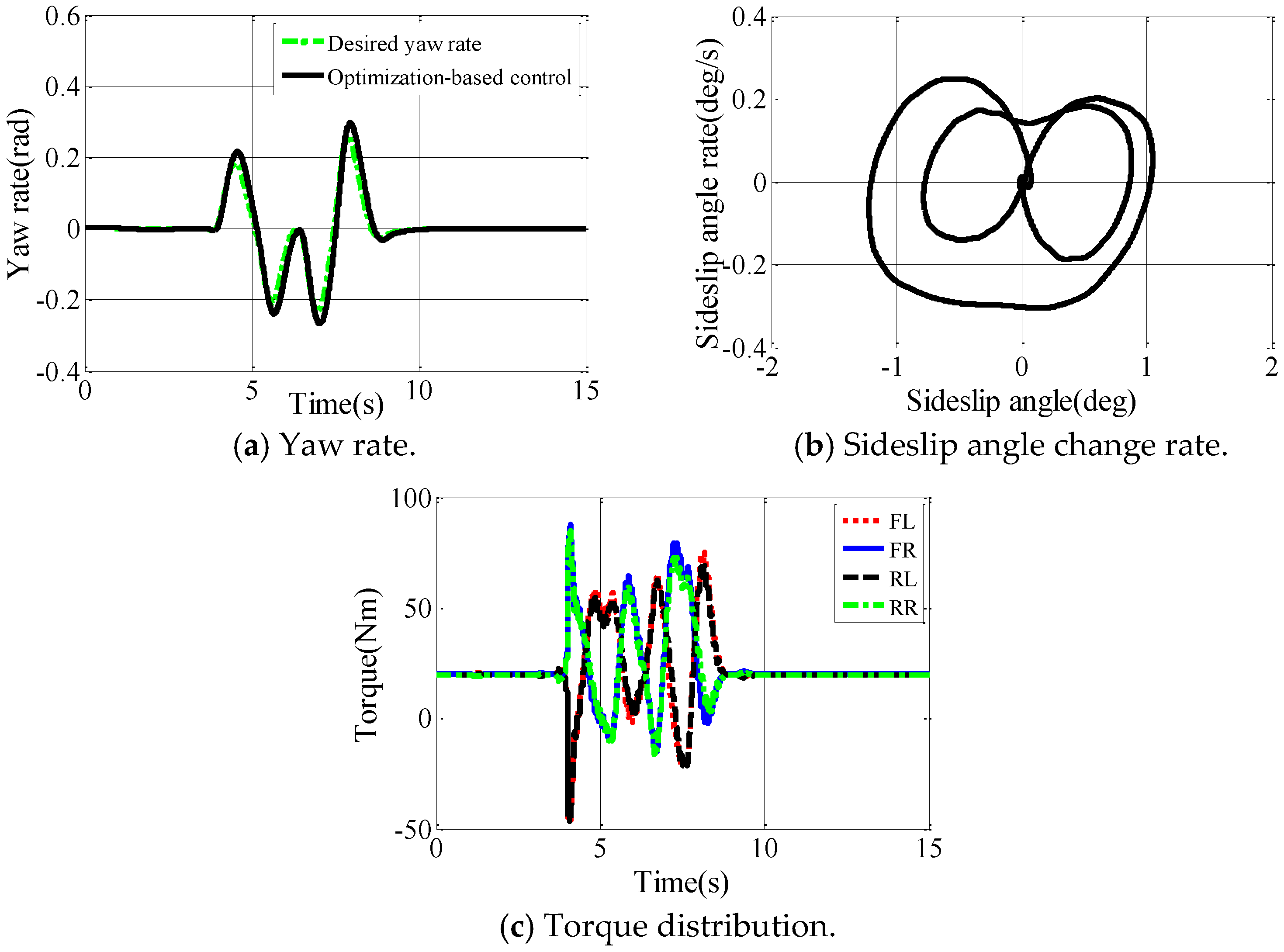
4.3. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yu, Z.; Feng, Y.; Xiong, L. Review on Vehicle Dynamics Control of Distributed Drive Electric Vehicle. J. Mech. Eng. 2013, 8, 105–114. [Google Scholar] [CrossRef]
- Pasterkamp, W.R.; Pacejka, H.B. The Tyre as a Sensor to Estimate Friction. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2007, 27, 409–422. [Google Scholar] [CrossRef]
- Zanten, A.; Bosch, R. Evolution of Electronic Control Systems for Improving the Vehicle Dynamic Behavior. In Proceedings of the 6th International Symposium on Advanced Vehicle Control, Yokohama, Japan, 9–13 September 2002. [Google Scholar]
- Park, K.; Heo, S.; Baek, I. Controller design for improving lateral vehicle dynamic stability. JSAE Rev. 2001, 22, 481–486. [Google Scholar] [CrossRef]
- Pennycott, A.; Novellis, L.; Gruber, P.; Sorniotti, A.; Goggia, T. Enhancing the Energy Efficiency of Fully Electric Vehicles via the Minimization of Motor Power Losses. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Manchester, UK, 3–16 October 2013; pp. 4167–4172. [Google Scholar]
- Nam, K.; Fujimoto, H.; Hori, Y. Lateral Stability Control of In-Wheel-Motor-Driven Electric Vehicles Based on Sideslip Angle Estimation Using Lateral Tire Force Sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar]
- Jonasson, M.; Andreasson, J.; Solyom, S.; Jacobson, B.; Trigell, A. Utilization of Actuators to Improve Vehicle Stability at the Limit: From Hydraulic Brakes Toward Electric Propulsion. J. Dyn. Syst. Meas. Control 2011, 133, 502–506. [Google Scholar] [CrossRef]
- Doumiati, M.; Victorino, A.; Charara, A.; Lechner, D. Onboard Real-Time Estimation of Vehicle Lateral Tire—Road Forces and Sideslip Angle. IEEE/ASME Trans. Mech. 2011, 16, 601–614. [Google Scholar] [CrossRef]
- Gordon, T.; Howell, M.; Brandao, F. Integrated control methodologies for road vehicles. Veh. Syst. Dyn. 2003, 40, 157–190. [Google Scholar] [CrossRef]
- Doumiati, M.; Sename, O.; Dugard, L.; Martinez-Molina, J.-J.; Gaspar, P.; Szabo, Z. Integrated vehicle dynamics control via coordination of active front steering and rear braking. Eur. J. Control 2013, 19, 121–143. [Google Scholar] [CrossRef]
- Yin, D.; Shan, D.; Chen, B. A torque distribution approach to electronic stability control for in-wheel motor electric vehicles. In Proceedings of the 2016 IEEE International Conference on Applied System Innovation (ICASI 2016), Okinawa, Japan, 26–30 May 2016. [Google Scholar]
- Wang, J.; Longoria, R. Coordinated and reconfigurable vehicle dynamics control. IEEE Trans. Control Syst. Technol. 2009, 17, 723–732. [Google Scholar] [CrossRef]
- Johansen, T.; Fossen, T. Control allocation—A survey. Automatica 2013, 49, 1087–1103. [Google Scholar] [CrossRef]
- Chong, F.; Ding, N.; He, Y.; Xu, G.; Gao, F. Control allocation algorithm for over-actuated electric vehicles. J. Cent. South Univ. 2014, 21, 3705–3712. [Google Scholar]
- Liu, M.; Zhang, C. Development of an optimal control system for longitudinal and lateral stability of an individual eight-wheel-drive electric vehicle. Int. J. Veh. Des. 2015, 69, 132–150. [Google Scholar] [CrossRef]
- Yu, Z.; Leng, B.; Xiong, L.; Feng, Y.; Shi, F. Direct yaw moment control for distributed drive electric vehicle handling performance improvement. Chin. J. Mech. Eng. 2016, 29, 486–497. [Google Scholar] [CrossRef]
- Xiong, L.; Teng, W.; Yu, Z.; Zhang, W.; Feng, Y. Novel stability control strategy for distributed drive electric vehicle based on driver operation intention. Int. J. Autom. Technol. 2016, 17, 651–663. [Google Scholar] [CrossRef]
- Zhao, H.; Gao, B.; Ren, B.; Deng, W. Model predictive control allocation for stability improvement of four-wheel drive electric vehicles in critical driving condition. IET Control Theory Appl. 2015, 19, 2688–2696. [Google Scholar] [CrossRef]
- Alipour, H.; Sabahi, M.; Sharifian, M. Lateral stabilization of a four wheel independent drive electric vehicle on slippery roads. Mechatronics 2015, 30, 275–285. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. Optimal Distribution Control of Non-Linear Tire Force of Electric Vehicles with In-Wheel Motors. Asian J. Control 2016, 18, 69–88. [Google Scholar] [CrossRef]
- Zhai, L.; Sun, T.; Wang, J. Electronic Stability Control Based on Motor Driving and Braking Torque Distribution for a Four In-Wheel Motor Drive Electric Vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Wang, J.; Wang, R.; Jing, H.; Chen, N. Coordinated Active Steering and Four-wheel Independently Driving/Braking Control with Control Allocation. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Le, A.; Chen, C. Vehicle stability control by using an adaptive sliding-mode algorithm. Int. J. Veh. Des. 2016, 72, 107–131. [Google Scholar] [CrossRef]
- Wang, Q.; Ayalew, B.; Singh, A. Control Allocation for Multi-Axle Hub Motor Driven Land Vehicles. SAE Int. J. Altern. Powertrains 2016, 5, 338–347. [Google Scholar] [CrossRef]
- Polesel, M.; Shyrokau, B.; Tanelli, M.; Savitski, D.; Ivanov, V.; Ferrara, A. Hierarchical control of overactuated vehicles via sliding mode techniques. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014. [Google Scholar]
- Canale, M.; Fagiano, L.; Ferrara, A.; Vecchio, C. Vehicle Yaw Control via Second-Order Sliding-Mode Technique. IEEE Trans. Ind. Electron. 2008, 55, 3908–3916. [Google Scholar] [CrossRef]
- Kuiper, E.; Van Oosten, J.J.M. The PAC2002 advanced handling tire model. Veh. Syst. Dyn. 2007, 45, 153–167. [Google Scholar] [CrossRef]
- Guo, K.; Peng, F. Preview optimized artificial neural network driver model. Chin. J. Mech. Eng. 2003, 39, 26–29. [Google Scholar] [CrossRef]
- Fallah, S.; Khajepour, A.; Fidan, B.; Chen, S.-K.; Litkouhi, B. Vehicle Optimal Torque Vectoring Using State-Derivative Feedback and Linear Matrix Inequality. IEEE Trans. Veh. Technol. 2013, 62, 1540–1552. [Google Scholar] [CrossRef]
- Hac, A.; Doman, D.; Oppenheimer, M. Unified Control of Brake- and Steer-by-Wire Systems Using Optimal Control Allocation Methods. In Proceedings of the 2006 SAE World Congress, Detroit, MI, USA, 3 April 2006. [Google Scholar]
- Goggia, T.; Sorniotti, A.; De Novellis, L.; Ferrara, A.; Gruber, P.; Theunissen, J.; Steenbeke, D.; Knauder, B.; Zehetner, J. Integral Sliding Mode for the Torque-Vectoring Control of Fully Electric Vehicles: Theoretical Design and Experimental Assessment. IEEE Trans. Veh. Technol. 2015, 64, 1701–1715. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Parameters | Notation | Value | Unit |
|---|---|---|---|
| Vehicle mass | m | 1600 | kg |
| Moment of inertia around Z axis | Iz | 1975 | kg·m2 |
| Distance from center of mass to front axle | a | 1.085 | m |
| Distance from center of mass to rear axle | b | 1.386 | m |
| Centroid height | H | 0.48 | m |
| Wheel-track | B | 1.429 | m |
| Wheel effective radius | R | 0.281 | m |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wang, Y.; Zhang, L.; Liu, M. Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle. Energies 2017, 10, 947. https://doi.org/10.3390/en10070947
Wang Z, Wang Y, Zhang L, Liu M. Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle. Energies. 2017; 10(7):947. https://doi.org/10.3390/en10070947
Chicago/Turabian StyleWang, Zhenpo, Yachao Wang, Lei Zhang, and Mingchun Liu. 2017. "Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle" Energies 10, no. 7: 947. https://doi.org/10.3390/en10070947
APA StyleWang, Z., Wang, Y., Zhang, L., & Liu, M. (2017). Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle. Energies, 10(7), 947. https://doi.org/10.3390/en10070947