
Diagnosis and Early Warning of Wind Turbine Faults Based on Cluster Analysis Theory and Modified ANFIS

Abstract
:1. Introduction
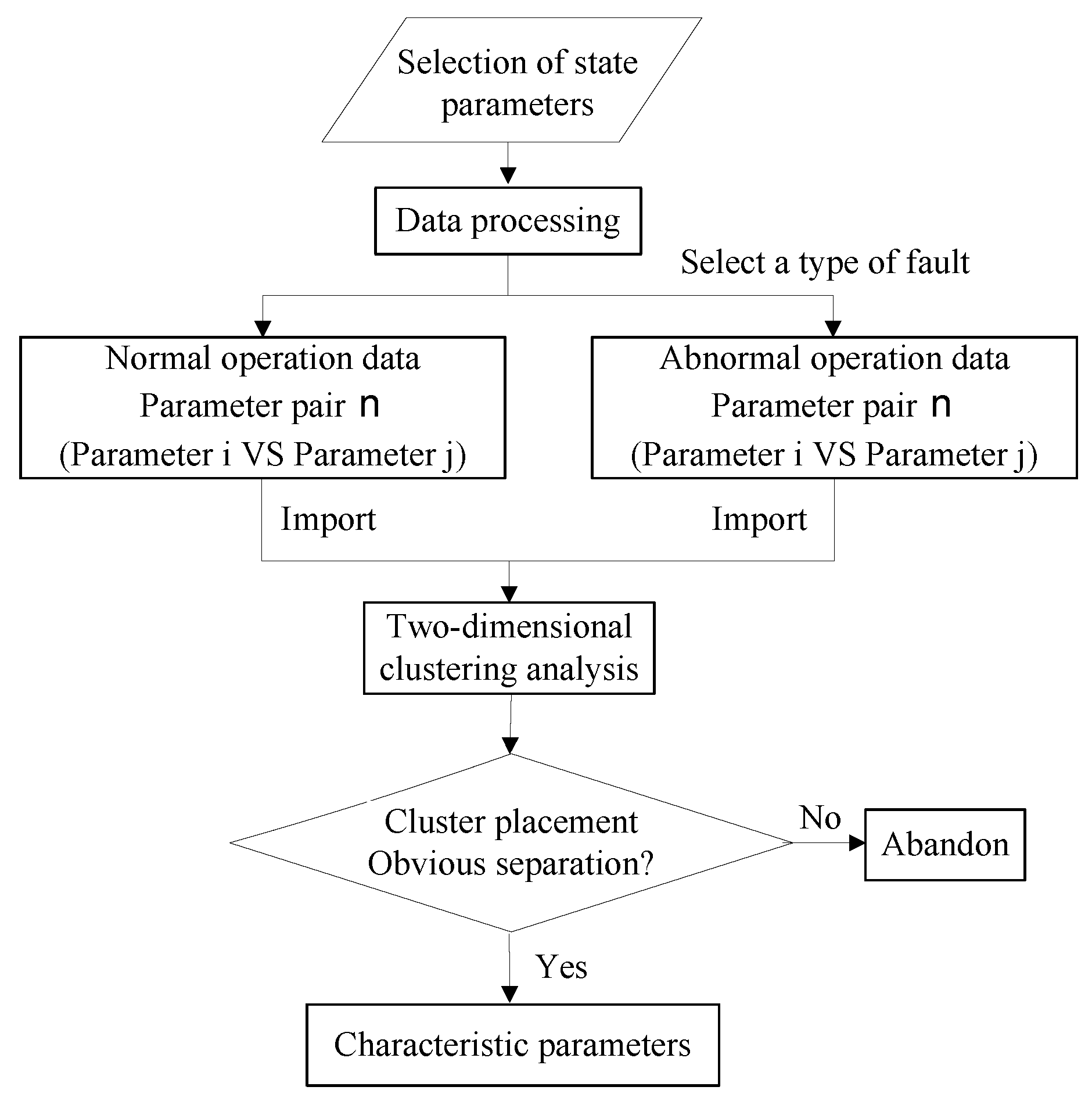
2. Analysis of Characteristic Parameters
- Step 1
- Taking data set as input samples, where .
- Step 2
- k data points are selected randomly from the data object as the initial clustering center, and it can be expressed as .
- Step 3
- Calculating the Euclidean distance between each observation point and each clustering center di,j, and .
- Step 4
- According to the principle of minimum Euclidean distance, each observation point is classified into the corresponding clustering object.
- Step 5
- Calculating the average value of each clustering object, and the average value is taken as the new clustering center.
- Step 6
- Repeating Step 3, Step 4 and Step 5 until two consecutive E values change is no more than 10%, or the number of iterations reaches 100 times.
3. Modified ANFIS of the WT Fault Early Warning Model
3.1. Domain Knowledge Rules
3.2. Modified ANFIS Model
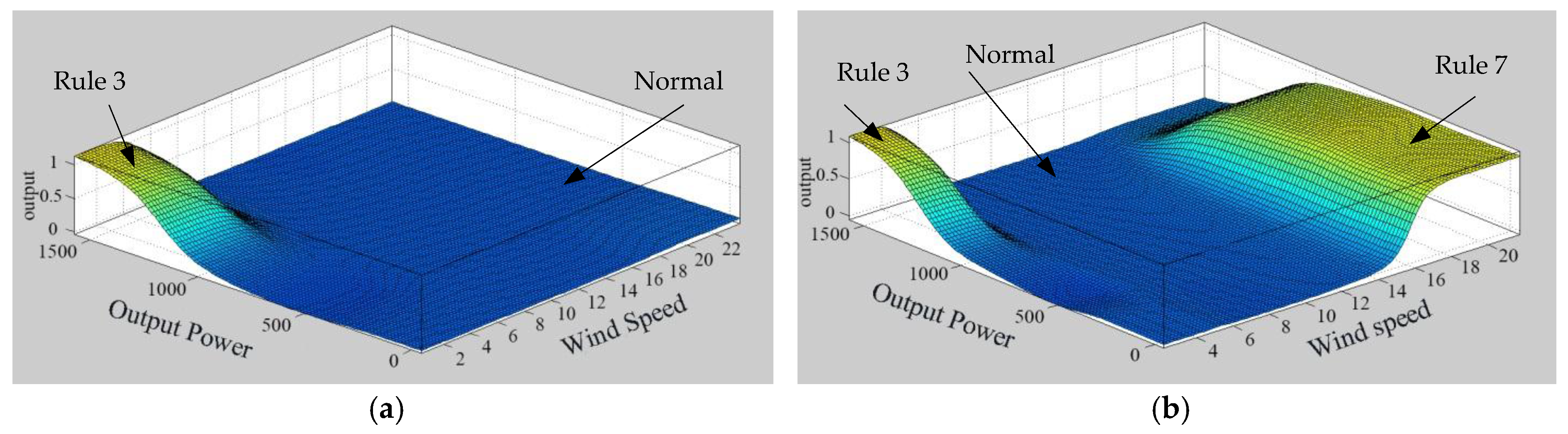
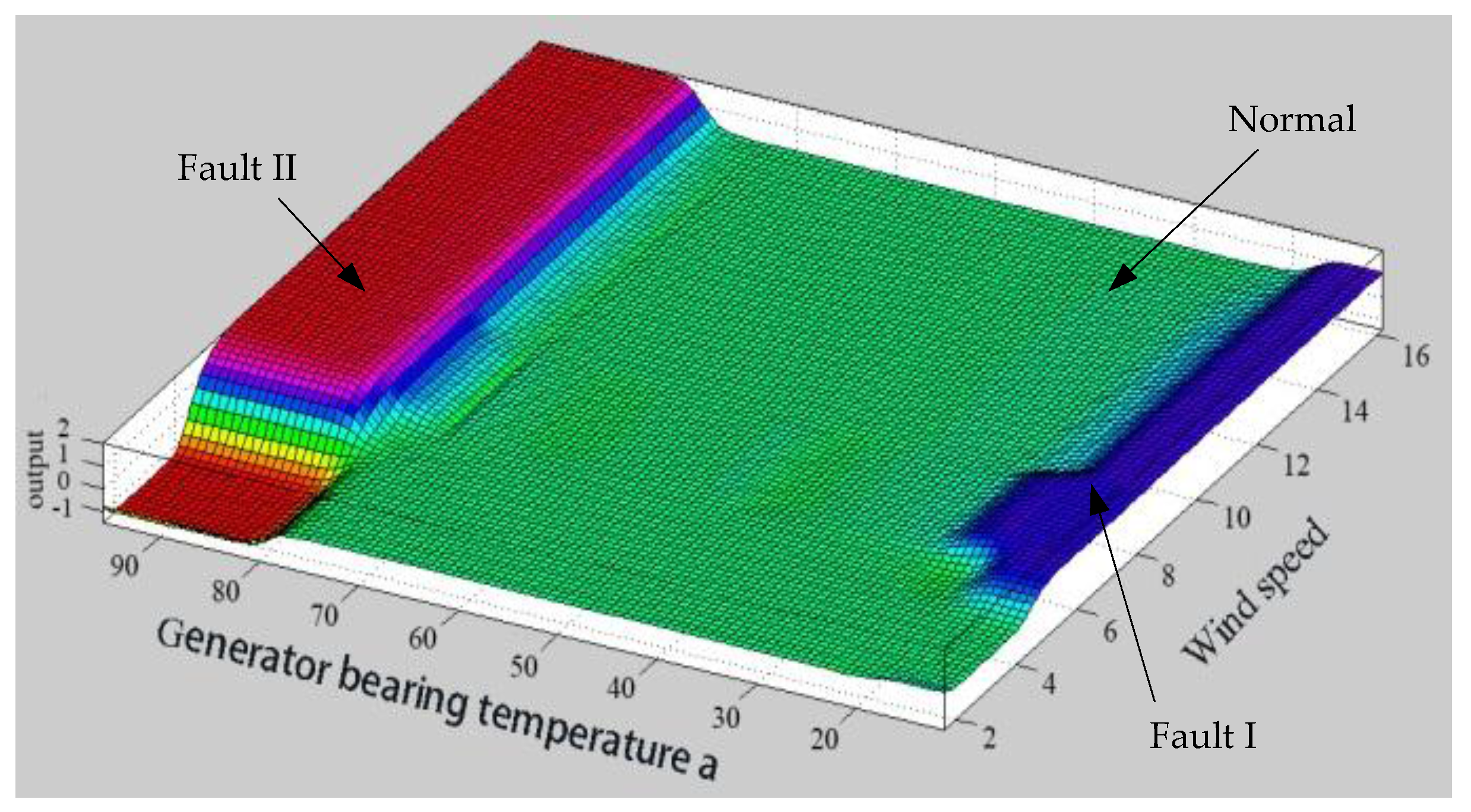
3.2.1. Principle Analysis
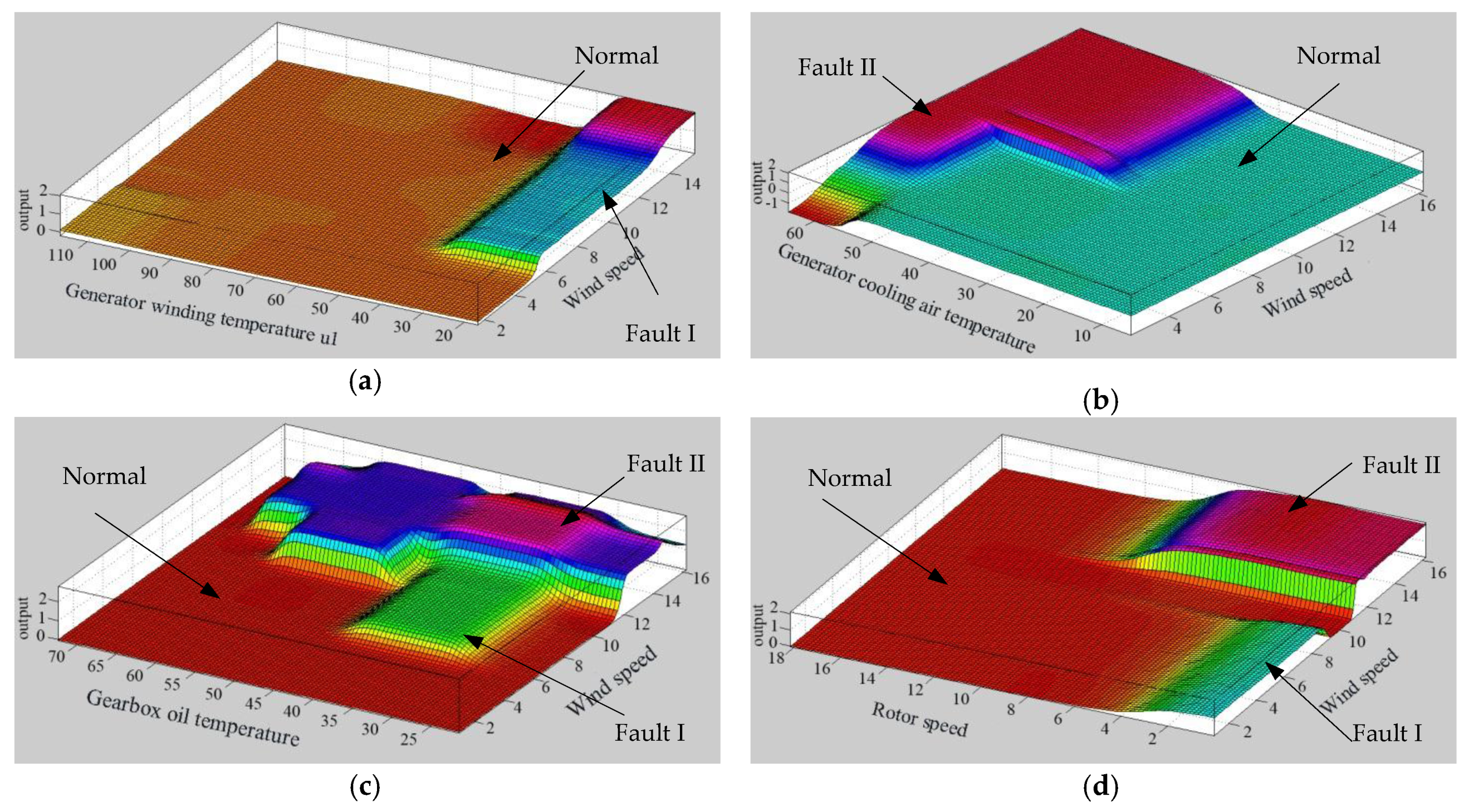
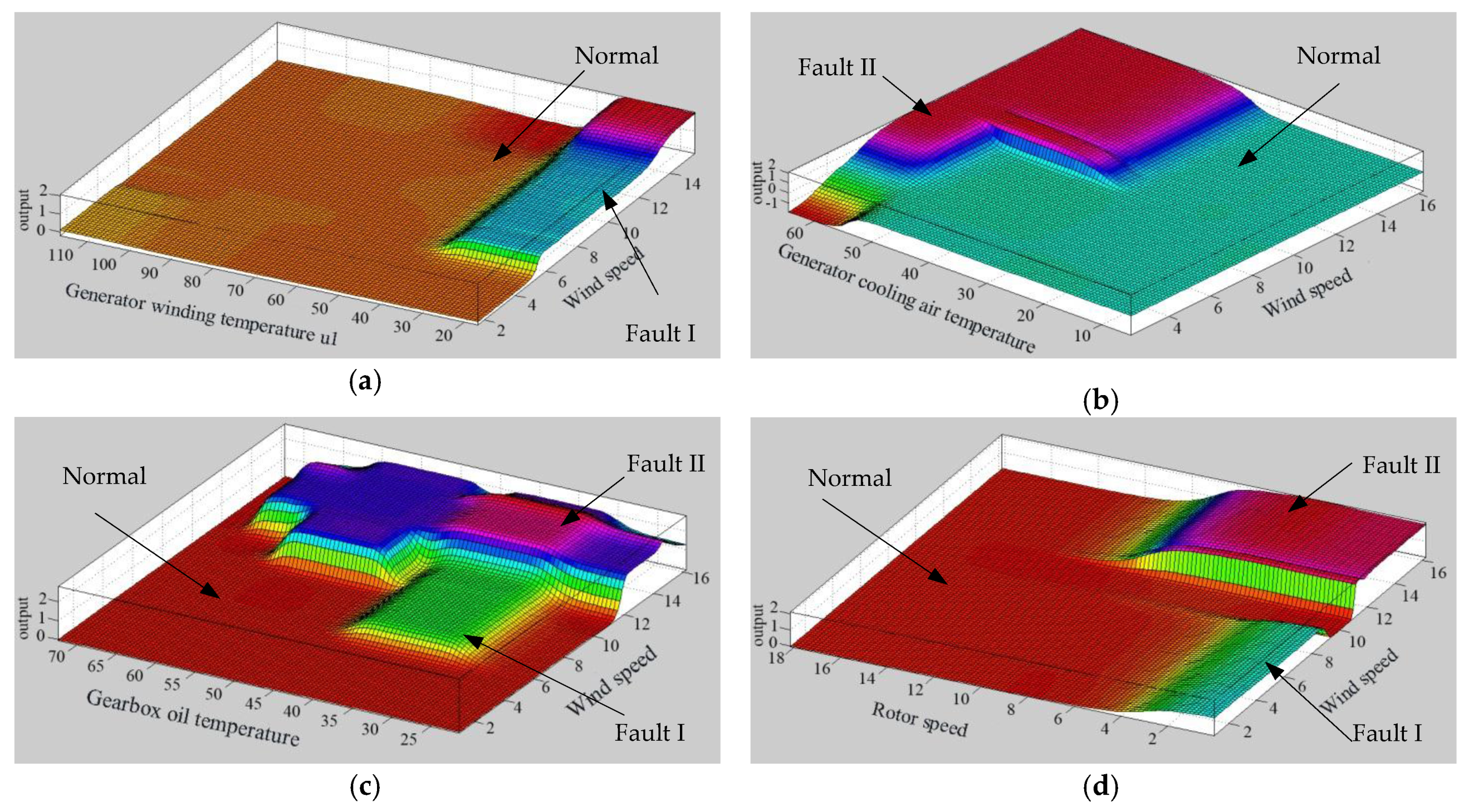
3.2.2. Model Verification
3.3. Comprehensive Early Warning Model and Its Effect Analysis
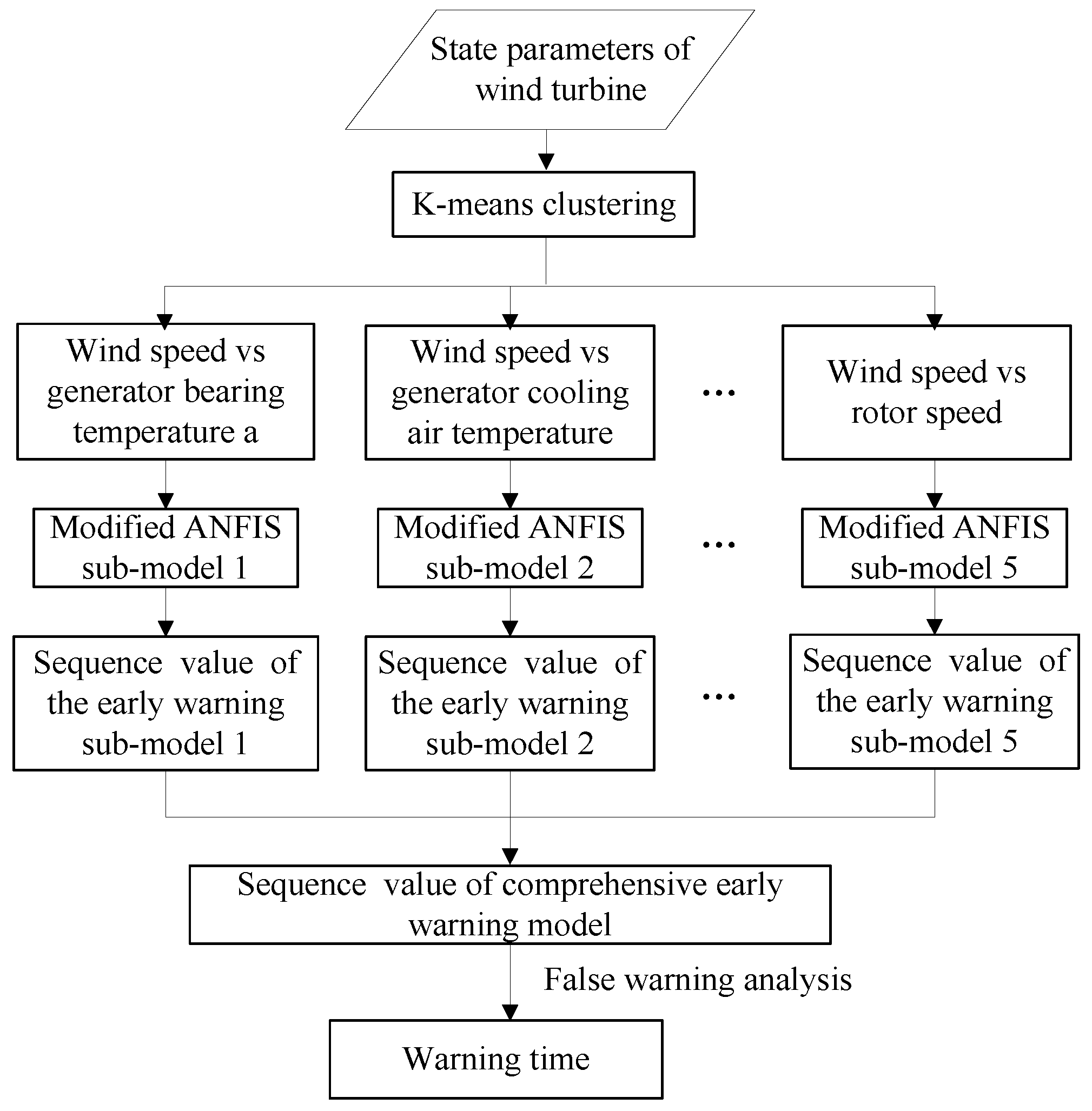
3.3.1. Comprehensive Early Warning Model
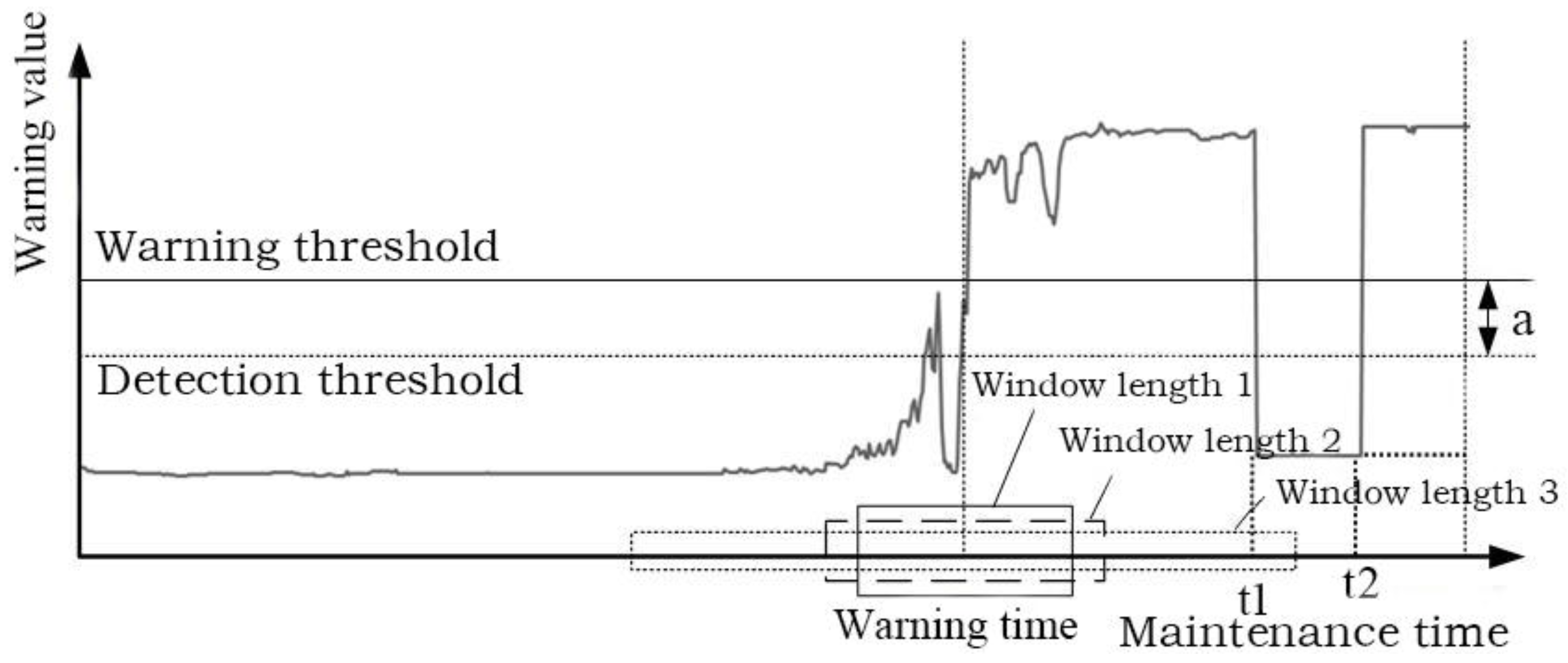
3.3.2. False Warning Analysis
3.3.3. Selection of False Alarm Parameter
4. Case Analysis
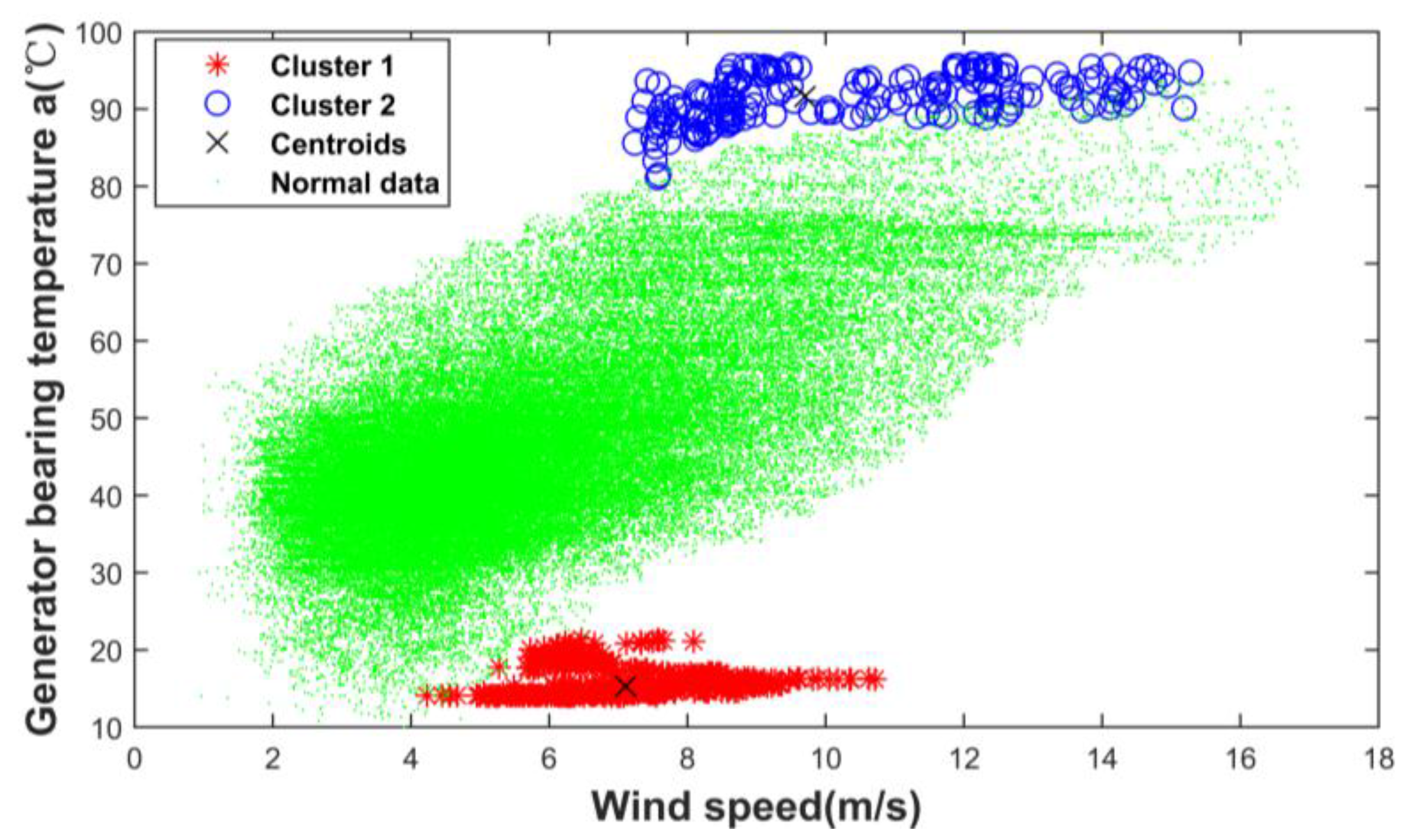
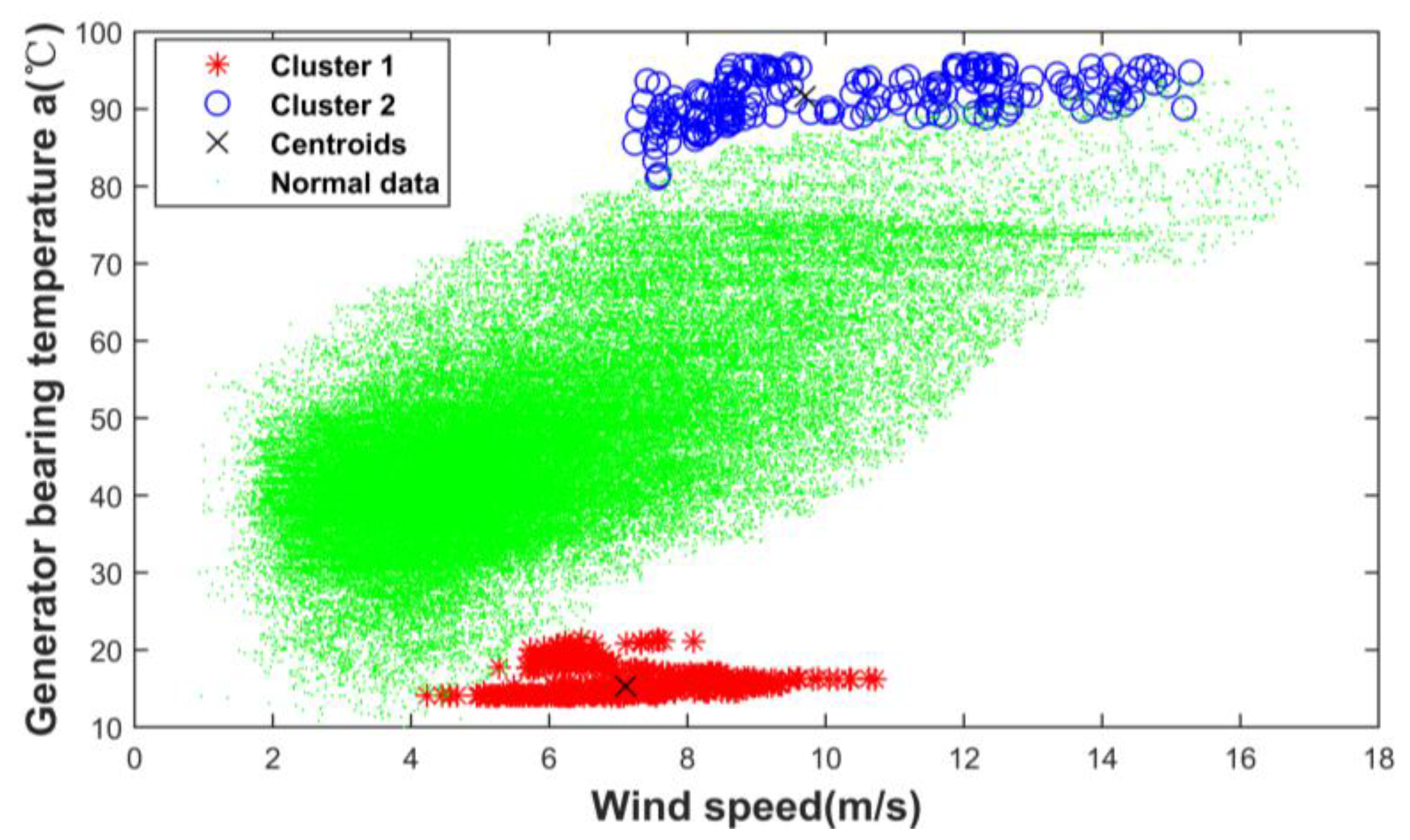
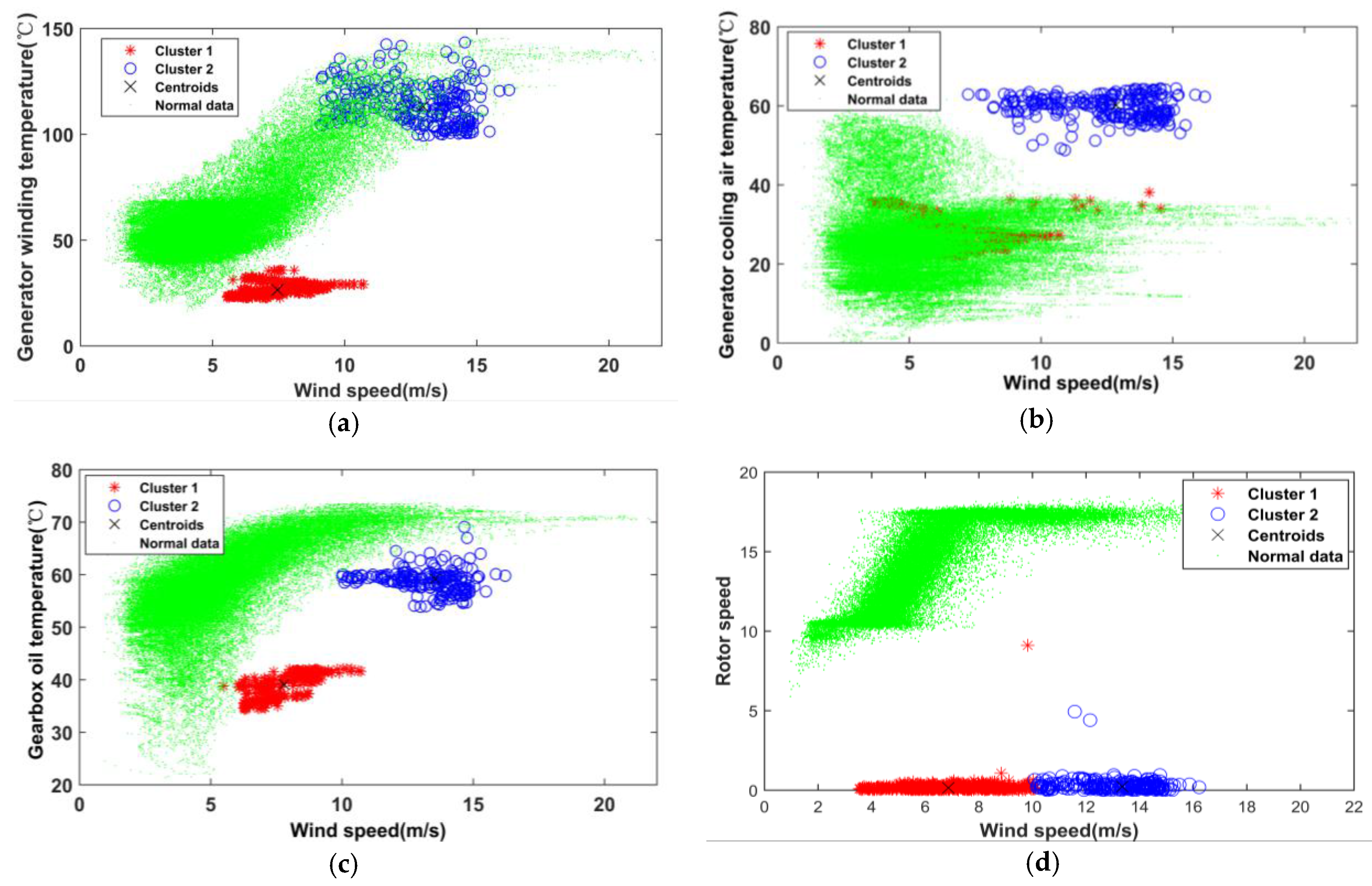
4.1. Analysis of Fault Feature Parameters
4.2. Warning Sub-Model
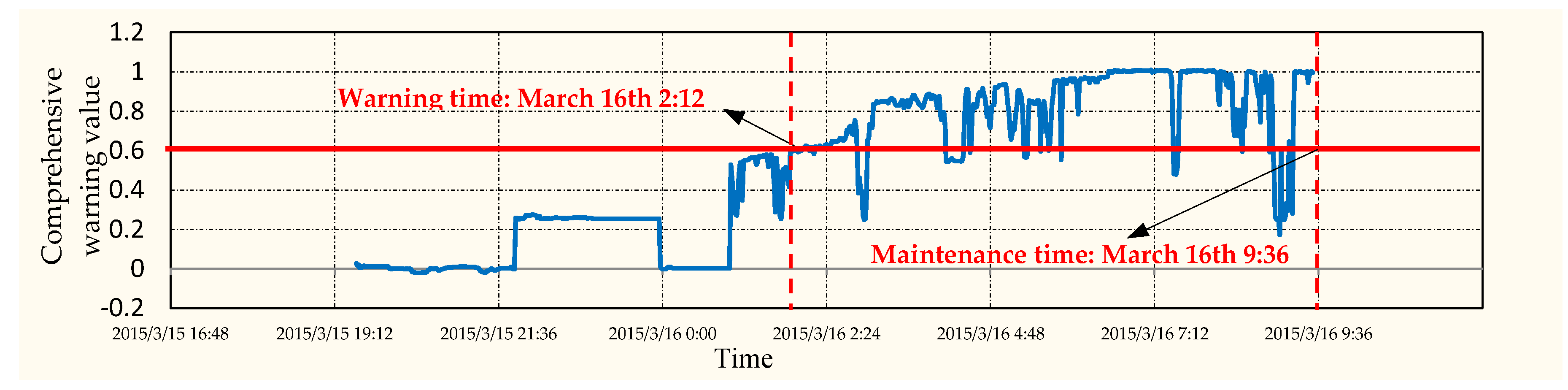
4.3. Comprehensive Analysis of the Early Warning Result
5. Conclusions
- (1)
- The fault parameter pair of a WT was analyzed by k-means cluster analysis. Furthermore, the abnormal data in the normal threshold range can be found in advance.
- (2)
- An early warning and diagnosis model was established based on the fault characteristics. The accuracy of the model in the absence of training data, sparse conditions were enhanced by improving the ANFIS algorithm with domain knowledge.
- (3)
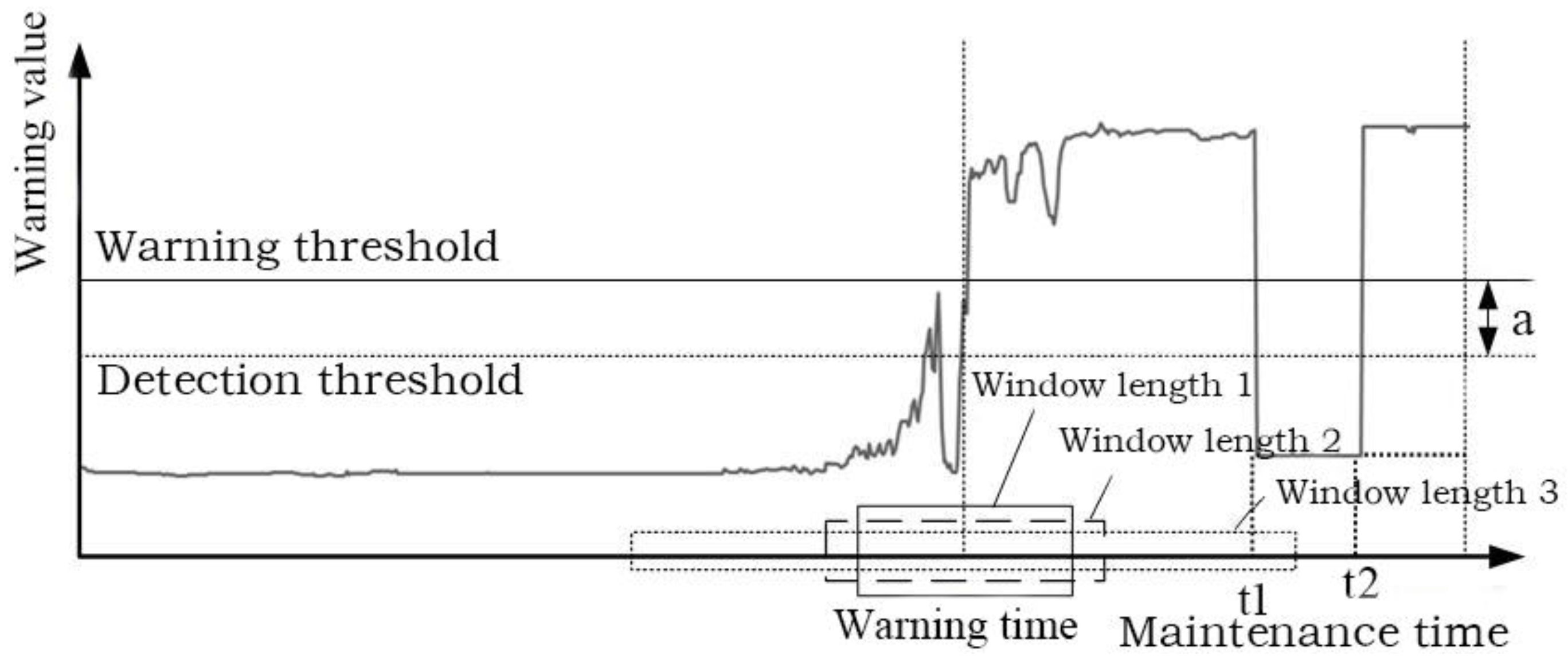
- The concepts of “window length”, “detection threshold”, “effective value of early warning”, and “possible value of early warning” were presented in this study to determine at the false alarm of early warning model. These concepts comply with actual failure data and maintenance data of wind farms.
- (4)
- In the example, the actual fault was recognized within 7 h and 19 min ahead of the threshold warning time of the SCADA system with this model. The function of fault diagnosis and early warning was achieved, and the effect was better than that of the traditional threshold method.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kusiak, A.; Li, W. Virtual Models for Prediction of Wind Turbine Parameters. IEEE Trans. Energy Convers. 2010, 25, 245–252. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, W.; Zhang, J.; Liu, D. Risk assessment of generation and transmission systems considering wind power penetration. Trans. Chin. Electrotech. Soc. 2014, 29, 260–270. [Google Scholar]
- Abdelrahem, M.; Kennel, R. Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines. Energies 2016, 9, 1066. [Google Scholar] [CrossRef]
- Qiu, Y. Study of Wind Turbine Fault Diagnosis Based on Unscented Kalman Filter and SCADA Data. Energies 2016, 9, 847. [Google Scholar]
- Wason, S.J.; Xiang, B.J.; Yang, W.; Tavner, P.J.; Crabtree, C.J. Condition monitoring of power output of wind turbine generators using wavelets. IEEE Trans. Energy Convers. 2010, 25, 715–721. [Google Scholar] [CrossRef]
- Lu, B.; Li, Y.; Wu, X. A review of recent advances in wind turbine condition monitoring and fault diagnosis. In Proceedings of the IEEE Conference on Power Electronics and Machines in Wind Applications (PEMWA09), Lincoln, NE, USA, 24–26 June 2009; pp. 1–7. [Google Scholar]
- Radoslaw, Z.; Walter, B.; Tomasz, B. Diagnostics of bearings in presence of strong operating conditions non-shtionarity-A procedure of load-dependent features processing with application to wind turbine bearings. Mech. Syst. Signal Process. 2014, 46, 16–27. [Google Scholar]
- Hameed, Z.; Hong, Y.S.; Cho, Y.M.; Ahn, S.H.; Song, C.K. Condition monitoring and fault detection of wind turbines and related algorithms: A review. Renew. Sustain. Energy Rev. 2009, 13, 1–39. [Google Scholar] [CrossRef]
- Jang, J. ANFIS: Adaptive-network-based fuzzy inference systems. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Buragohain, M.; Mahanta, C. A novel approach for ANFIS modelling based on full factorial design. Appl. Soft Comput. 2008, 8, 609–625. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, Q.; Sun, C.; Lei, S.; Liu, Y.; Song, Y. RBF Neural Network and ANFIS-Based Short-Term Load Forecasting Approach in Real-Time Price Environment. IEEE Trans. Power Syst. 2008, 23, 853–858. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Christine, D.P.; Ruth, S.; Angela, Y.W. An Efficient k-Means Clustering Algorithm: Analysis and Implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Zhang, X.; Su, B. Vibrant fault diagnosis for hydro-turbine generating unit using minmax kernel K-means clustering algorithm. Power Syst. Prot. Control 2015, 43, 27–34. [Google Scholar]
- Johanyák, Z.; Papp, O. A Hybrid Algorithm for Parameter Tuning in Fuzzy Model Identification. Acta Polytech. Hung. 2012, 9, 2012. [Google Scholar]
- Precup, R.; David, R.; Petriu, E.; Preitl, S.; Radac, M. Novel Adaptive Charged System Search algorithm for optimal tuning of fuzzy controllers. Expert Syst. Appl. 2014, 41, 1168–1175. [Google Scholar] [CrossRef]
- Kıran, M.; Fındık, O. A directed artificial bee colony algorithm. Appl. Soft Comput. J. 2015, 26, 454–462. [Google Scholar] [CrossRef]
- Solos, I.P.; Tassopoulos, I.X.; Beligiannis, G.N. Optimizing shift scheduling for tank trucks using an effective stochastic variable neighbourhood approach. Int. J. Artif. Intell. 2016, 14, 1–26. [Google Scholar]
- Zhou, Q.; Sun, W.; Zhang, Y.; Ren, H.J.; Sun, C.X.; Deng, J.Y. A new method to obtain load density based on improved ANFIS. Power Syst. Prot. Control 2011, 39, 29–34. [Google Scholar]
- Dragomir, O.; Dragomir, F.; Stefan, V.; Minca, E. Adaptive Neuro-Fuzzy Inference Systems as a Strategy for Predicting and Controling the Energy Produced from Renewable Sources. Energies 2015, 8, 13047–13061. [Google Scholar] [CrossRef]
- Ahmed, A.; Jun, S.; Senior, M.; Yan, J. Modeling and Simulation of an Adaptive Neuro-Fuzzy Inference System (ANFIS) for Mobile Learning. IEEE Trans. Learn. Technol. 2012, 5, 226–237. [Google Scholar]
- Chen, B.; Matthews, P.; Tavner, P. Automated on-line fault prognosis for wind turbine pitch systems using supervisory control and data acquisition. IET Renew. Power Gener. 2015, 9, 503–513. [Google Scholar] [CrossRef]
- Lapira, E.; Brisset, D.; Davari Ardakani, H.; Lee, J. Wind turbine performance assessment using multi-regime modeling approach. Renew. Energy 2012, 45, 86–95. [Google Scholar] [CrossRef]
- Zaher, A.; McArthur, S. Online wind turbine fault detection through automated SCADA data analysis. Wind Energy 2009, 12, 74–93. [Google Scholar] [CrossRef]
- Zheng, X.; Li, M.; Wang, J.; Ren, H.; Fu, Y. Operational conditions classification of offshore wind turbines based on kernel principal analysis optimized by PSO. Power Syst. Prot. Control 2016, 44, 28–35. [Google Scholar]
- Li, Y.; Fang, R. Reliability assessment for wind turbine based on weighted degree of improved grey incidence. Power Syst. Prot. Control 2015, 43, 63–69. [Google Scholar]
- Yin, Z.; Han, B.; Xie, S. An improved grey correlation algorithm and its application for diesel fault prediction. In Proceedings of the Sixth International Conference on Intelligent Control and Information Processing (ICICIP), Wuhan, China, 26–28 November 2015; pp. 412–416. [Google Scholar]
- Kong, Y.; Jing, M. Research of the Classification Method Based on Confusion Matrixes and Ensemble Learning. Comput. Eng. Sci. 2012, 34, 111–117. [Google Scholar]
- College of Electrical Engineering, Chongqing University, Shazhengjie, Shapingba, Chongqing, China. Available online: http://www.cee.cqu.edu.cn/Teacherweb_Article.asp?id=1211&tid=1253&y_id=1054 (accessed on 23 May 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maintenance information | Forecast | ||
|---|---|---|---|
| Maintenance Required | No Maintenance Required | ||
| Reality | Maintenance | TP | FN |
| No maintenance | FP | TN | |
| Window Length | m/N | ACC (%) | ER (%) | RC (%) | P (%) |
|---|---|---|---|---|---|
| Warning threshold 0 | |||||
| 20 min | >25% | 55% | 45% | 100% | 52.63% |
| 40 min | >25% | 57.5% | 42.5% | 100% | 54.05% |
| 20 min | >35% | 60% | 40% | 100% | 55.56% |
| 40 min | >35% | 62.5% | 37.5% | 100% | 57.14% |
| Warning threshold 0.1 | |||||
| 20 min | >25% | 91.25% | 8.75% | 97.5% | 86.67% |
| 40 min | >25% | 75% | 25% | 100% | 66.67% |
| 20 min | >35% | 77.5% | 22.5% | 100% | 68.97% |
| 40 min | >35% | 77.5% | 22.5% | 100% | 68.97% |
| Warning threshold 0.2 | |||||
| 20 min | >25% | 87.5% | 12.5% | 100% | 80% |
| 40 min | >25% | 87.5% | 12.5% | 100% | 80% |
| 20 min | >35% | 88.75% | 11.75% | 97.5% | 82.98% |
| 40 min | >35% | 91.25% | 8.75% | 97.5% | 86.67% |
| Warning threshold 0.3 | |||||
| 20 min | >25% | 90% | 10% | 100% | 83.33% |
| 40 min | >25% | 91.25% | 8.75% | 97.5% | 86.67% |
| 20 min | >35% | 93.75% | 6.25% | 95% | 92.68% |
| 40 min | >35% | 95% | 5% | 95% | 95% |
| Warning threshold 0.4 | |||||
| 20 min | >25% | 93.75% | 6.25% | 97.5% | 92.68% |
| 40 min | >25% | 92.5% | 7.5% | 95% | 90.48% |
| 20 min | >35% | 95% | 5% | 95% | 95% |
| 40 min | >35% | 95% | 5% | 92.5% | 97.37% |
| Warning threshold 0.5 | |||||
| 20 min | >25% | 91.25% | 6.25% | 97.5% | 90.7% |
| 40 min | >25% | 95% | 5% | 95% | 95% |
| 20 min | >35% | 96.25% | 3.75% | 92.5% | 100% |
| 40 min | >35% | 96.25% | 3.75% | 92.5% | 100% |
| Warning threshold 0.6 | |||||
| 20 min | >25% | 93.75% | 6.25% | 95% | 92.68% |
| 40 min | >25% | 97.5% | 2.5% | 95% | 100% |
| 20 min | >35% | 96.25% | 3.75% | 92.5% | 100% |
| 40 min | >35% | 96.25% | 3.75% | 92.5% | 100% |
| Warning threshold 0.7 | |||||
| 20 min | >25% | 92.5% | 7.5% | 92.5% | 92.5% |
| 40 min | >25% | 95% | 5% | 90% | 100% |
| 20 min | >35% | 95% | 5% | 90% | 100% |
| 40 min | >35% | 93.75% | 6.25% | 87.5% | 100% |
| Warning threshold 0.8 | |||||
| 20 min | >25% | 90% | 10% | 85% | 94.44% |
| 40 min | >25% | 91.25% | 8.75% | 85% | 97.14% |
| 20 min | >35% | 90% | 10% | 80% | 100% |
| 40 min | >35% | 87.5% | 12.5% | 83.33% | 100% |
| Warning threshold 0.9 | |||||
| 20 min | >25% | 83.75% | 16.25% | 70% | 96.55% |
| 40 min | >25% | 81.25% | 18.75% | 65% | 96.3% |
| 20 min | >35% | 80% | 18.75% | 65% | 100% |
| 40 min | >35% | 80% | 18.75% | 65% | 100% |
| Warning threshold 1.0 | |||||
| 20 min | >25% | 57.5% | 42.5% | 13.33% | 100% |
| 40 min | >25% | 55% | 45% | 9.09% | 100% |
| 20 min | >35% | 52.5% | 47.5% | 4.76% | 100% |
| 40 min | >35% | 52.5% | 47.5% | 4.76% | 100% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Q.; Xiong, T.; Wang, M.; Xiang, C.; Xu, Q. Diagnosis and Early Warning of Wind Turbine Faults Based on Cluster Analysis Theory and Modified ANFIS. Energies 2017, 10, 898. https://doi.org/10.3390/en10070898
Zhou Q, Xiong T, Wang M, Xiang C, Xu Q. Diagnosis and Early Warning of Wind Turbine Faults Based on Cluster Analysis Theory and Modified ANFIS. Energies. 2017; 10(7):898. https://doi.org/10.3390/en10070898
Chicago/Turabian StyleZhou, Quan, Taotao Xiong, Mubin Wang, Chenmeng Xiang, and Qingpeng Xu. 2017. "Diagnosis and Early Warning of Wind Turbine Faults Based on Cluster Analysis Theory and Modified ANFIS" Energies 10, no. 7: 898. https://doi.org/10.3390/en10070898
APA StyleZhou, Q., Xiong, T., Wang, M., Xiang, C., & Xu, Q. (2017). Diagnosis and Early Warning of Wind Turbine Faults Based on Cluster Analysis Theory and Modified ANFIS. Energies, 10(7), 898. https://doi.org/10.3390/en10070898