
Hybrid, Multi-Megawatt HVDC Transformer Topology Comparison for Future Offshore Wind Farms

 ,
,  and
and 
Abstract
:1. Introduction
2. Computer Simulation
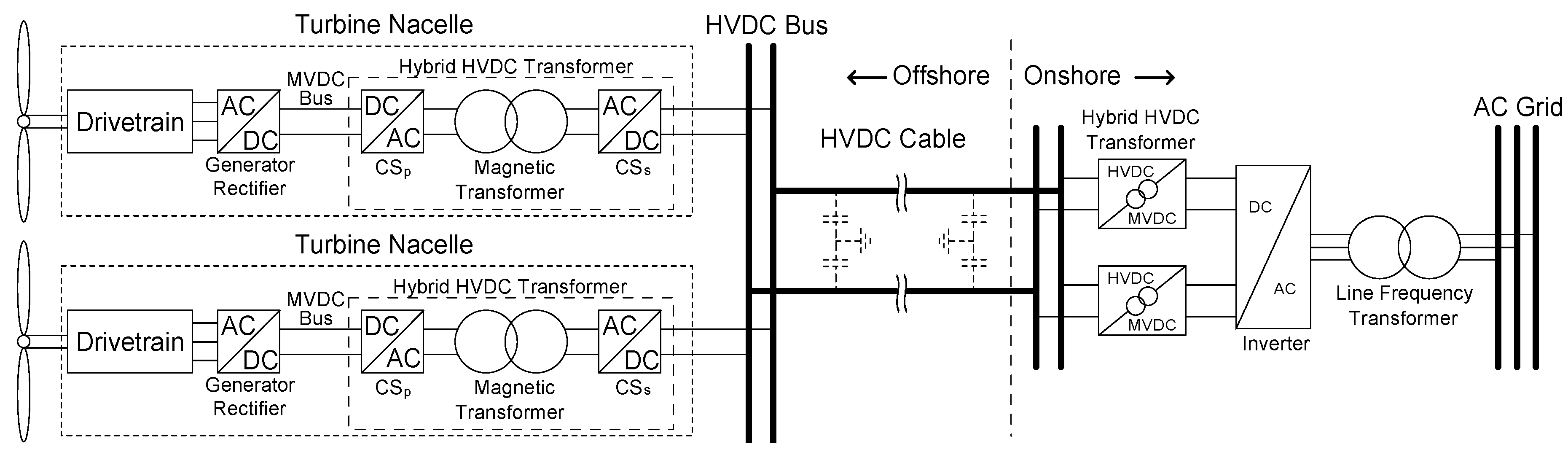
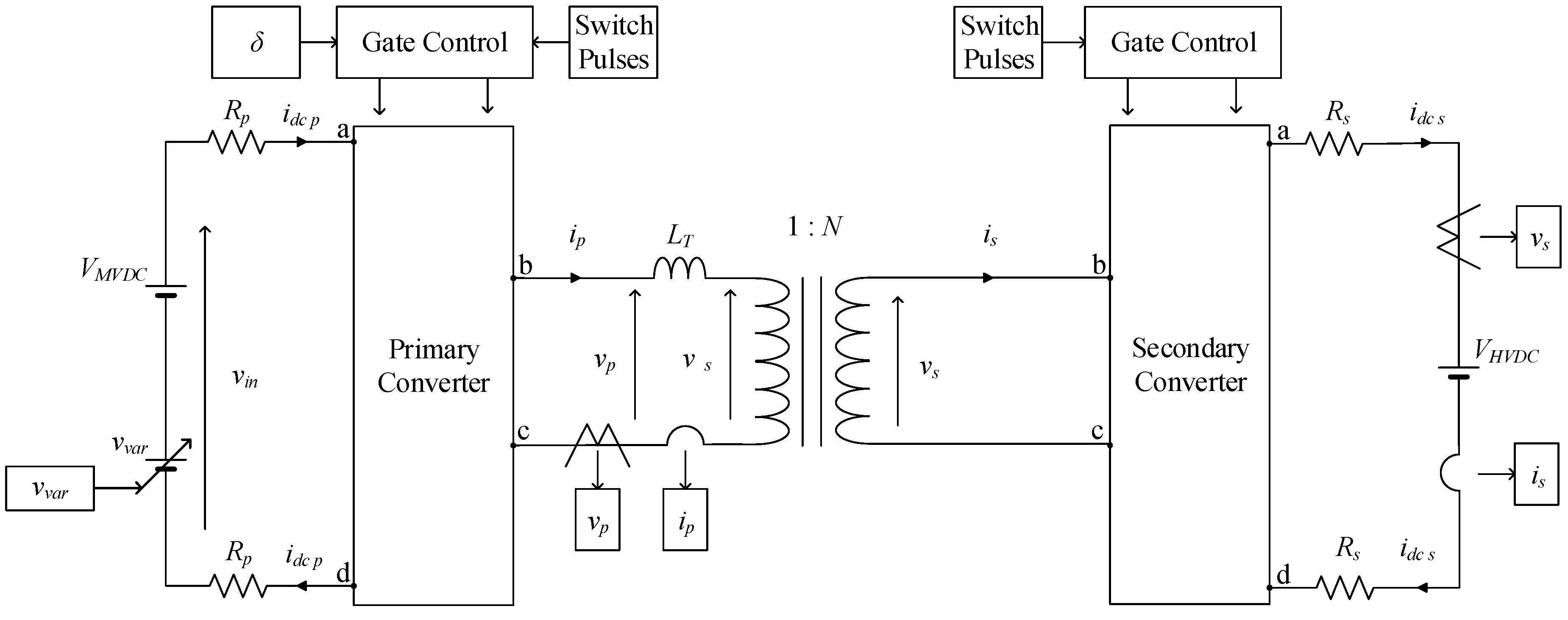
2.1. Simulation Models
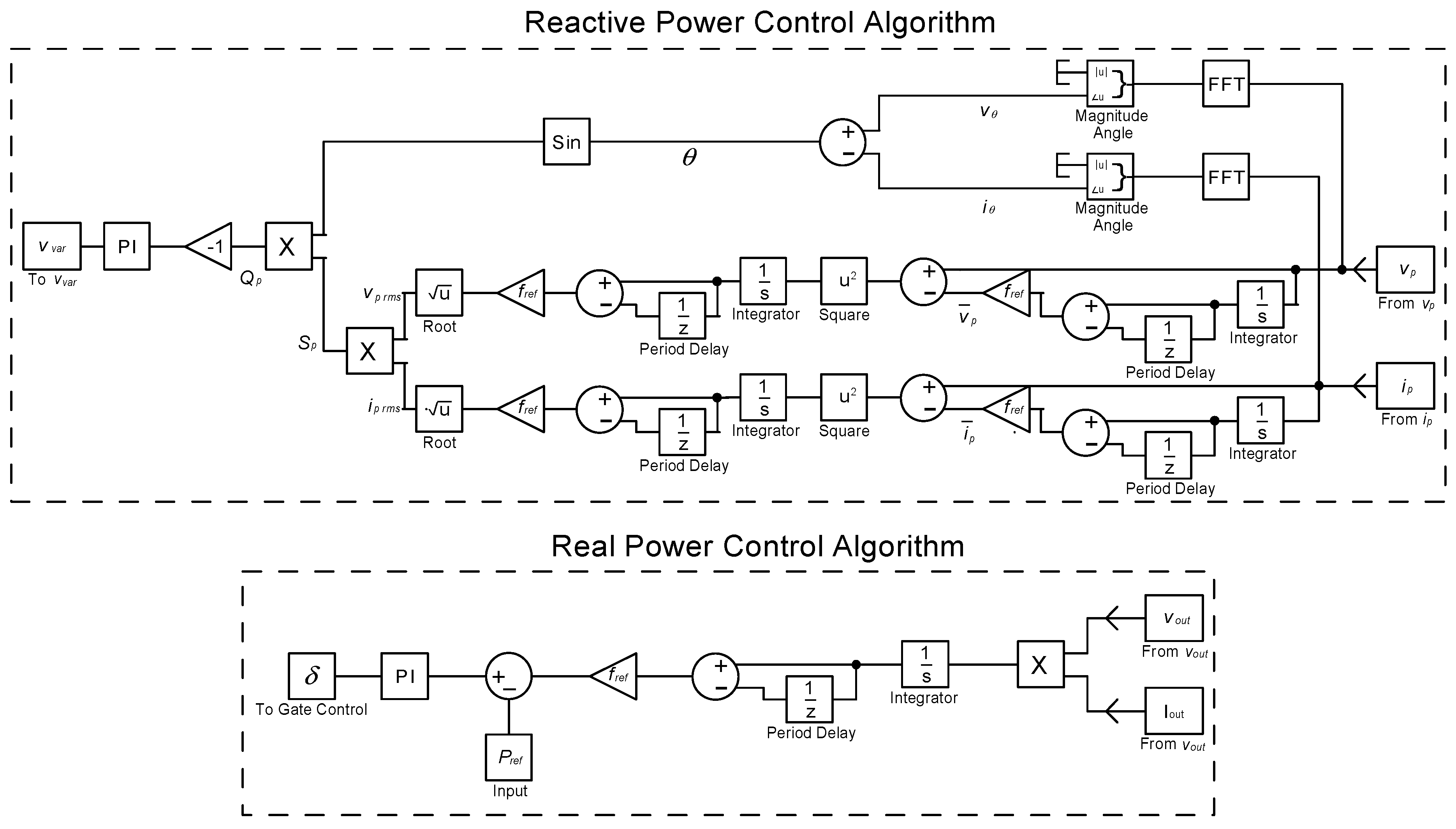
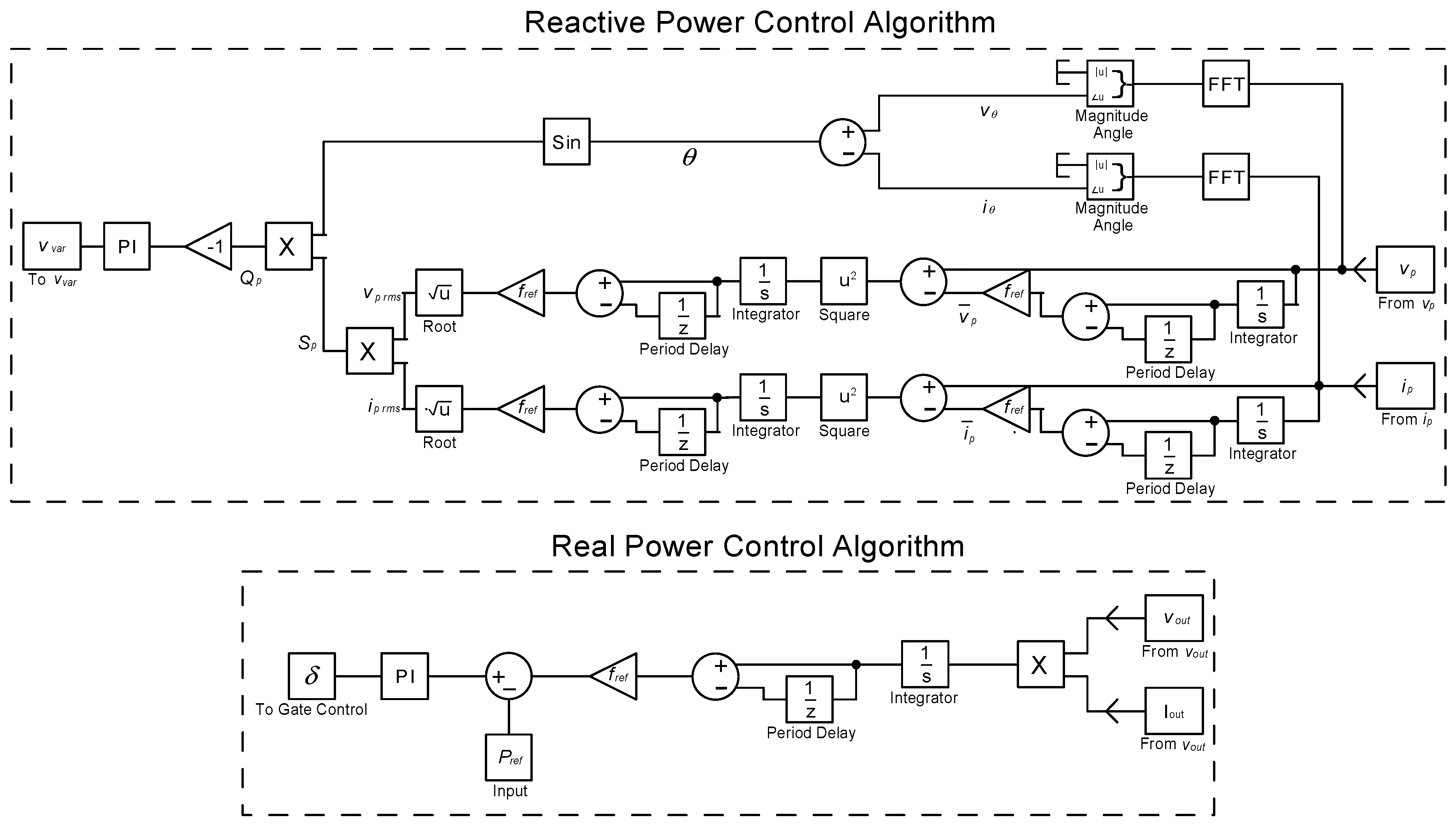
2.2. Active and Reactive Power Control Algorithms
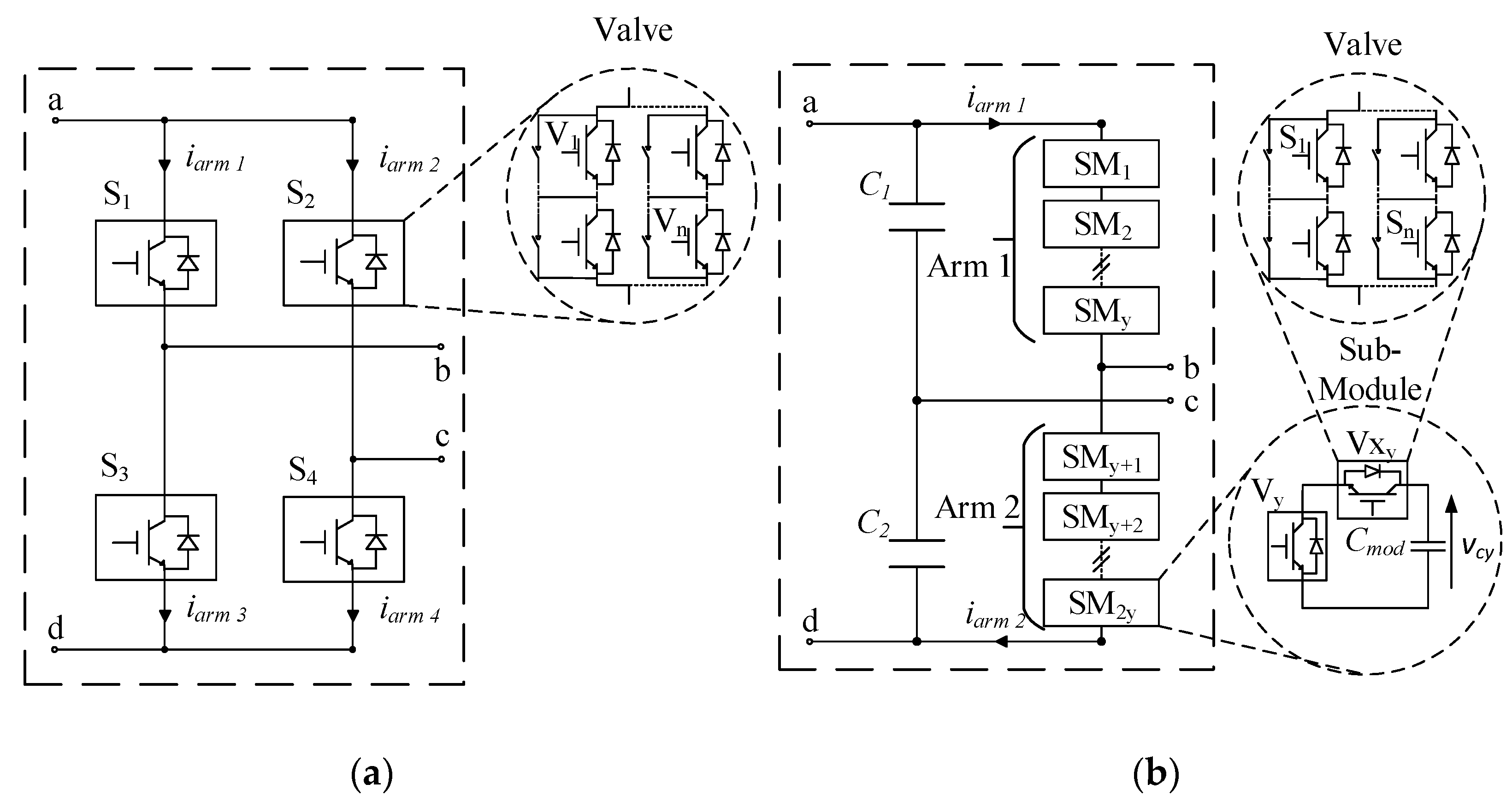
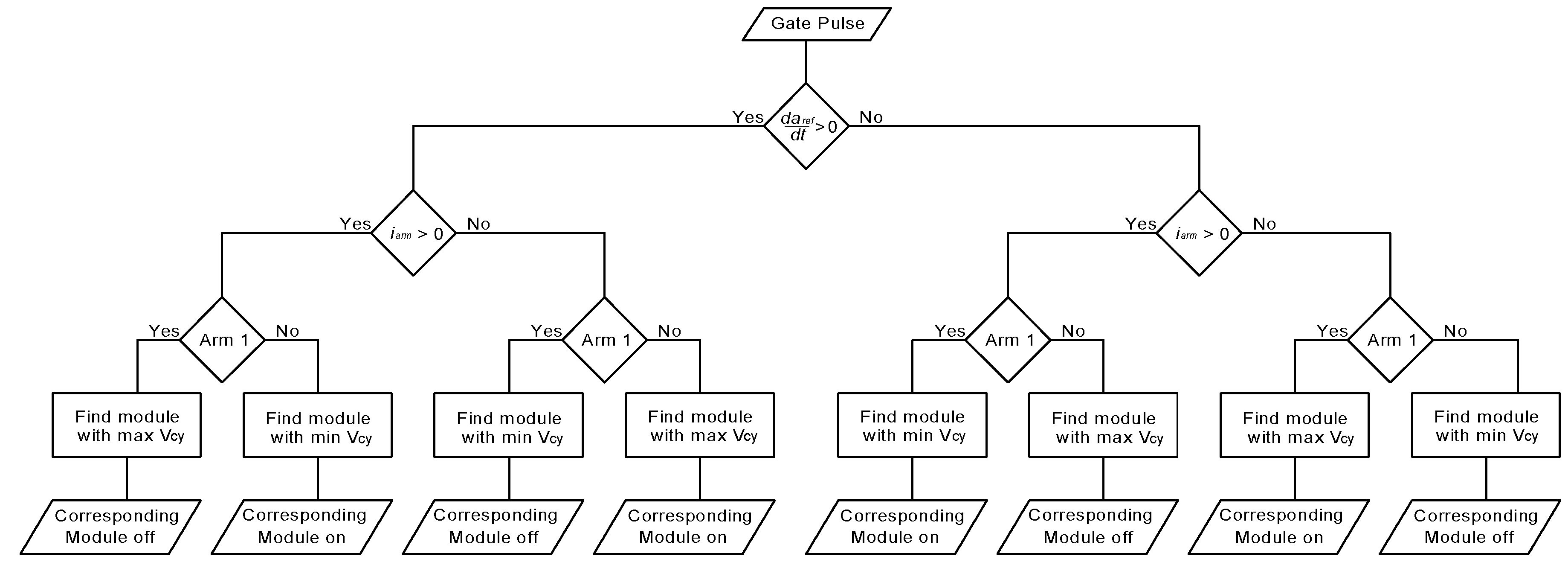
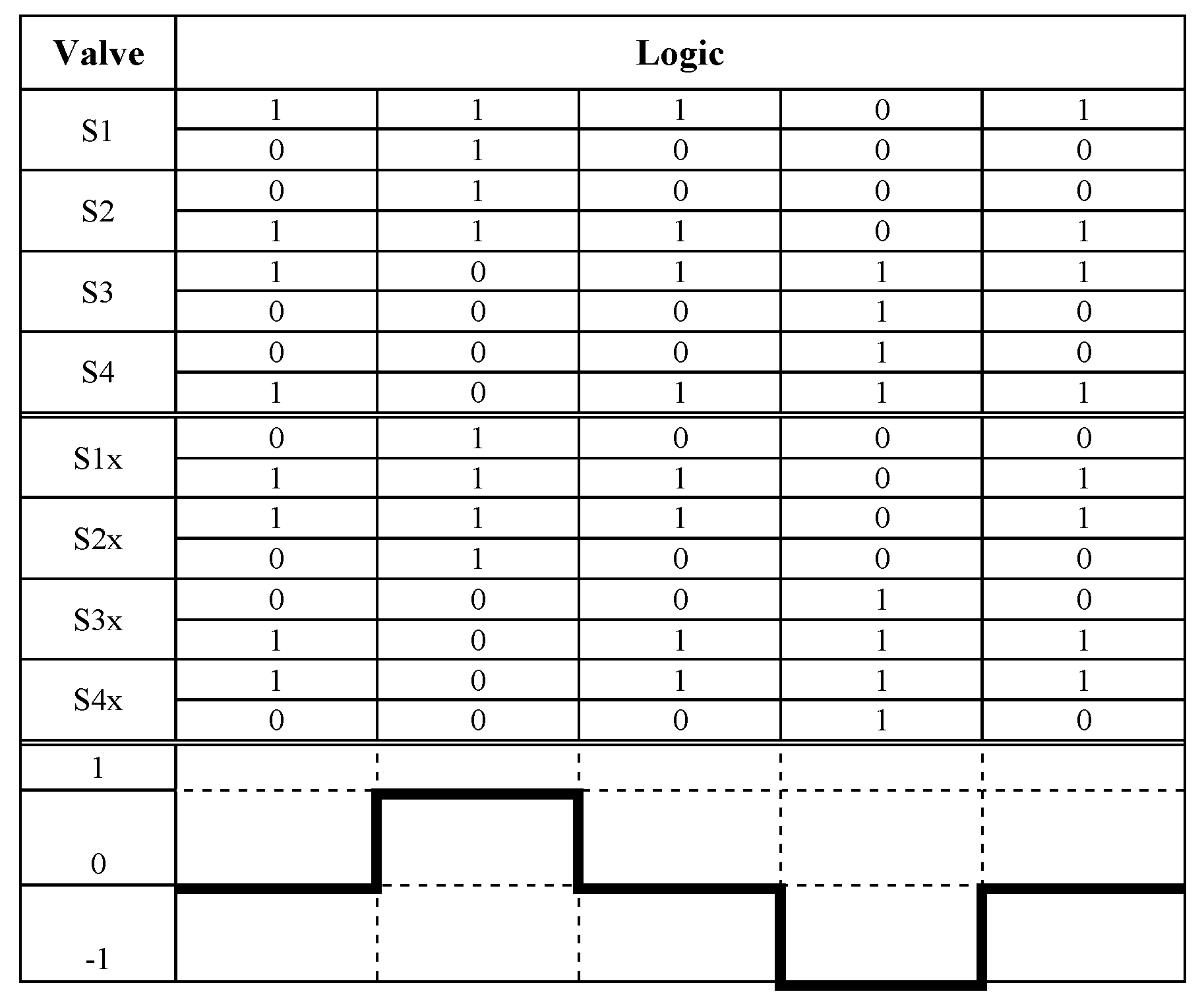
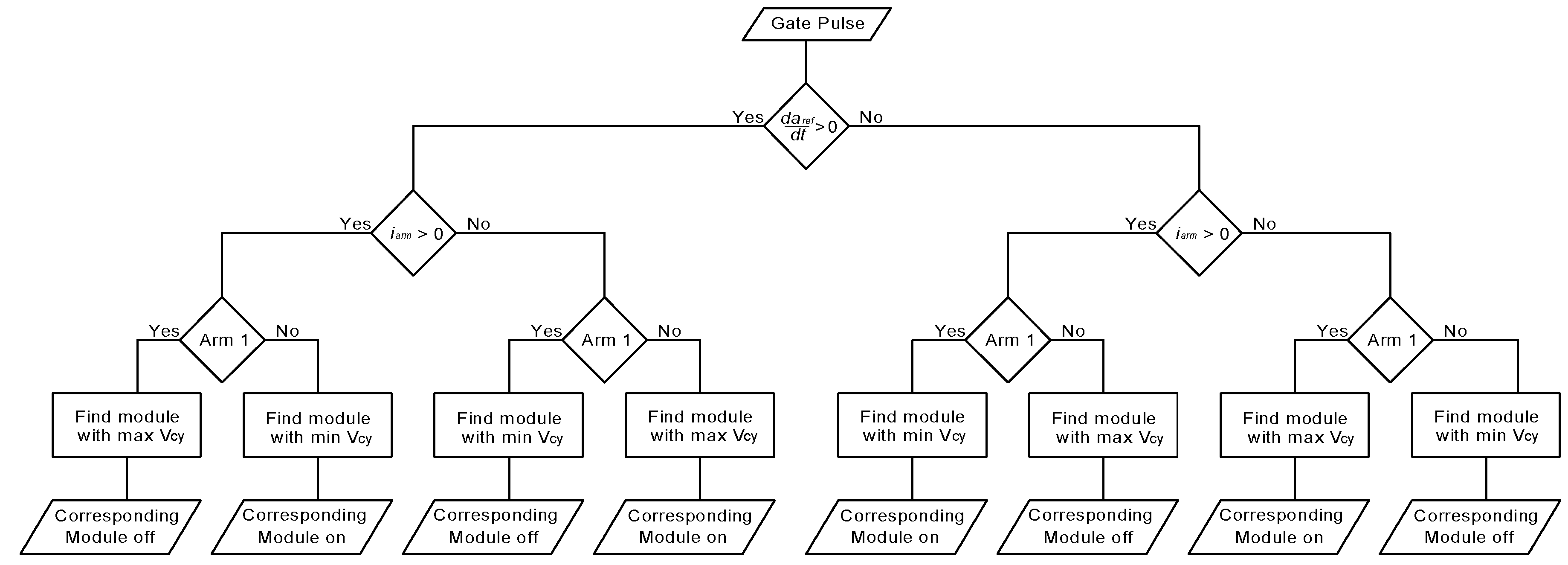
2.3. MMC Control Algorithm
3. Transformer Loss Calculation
3.1. Converter Losses
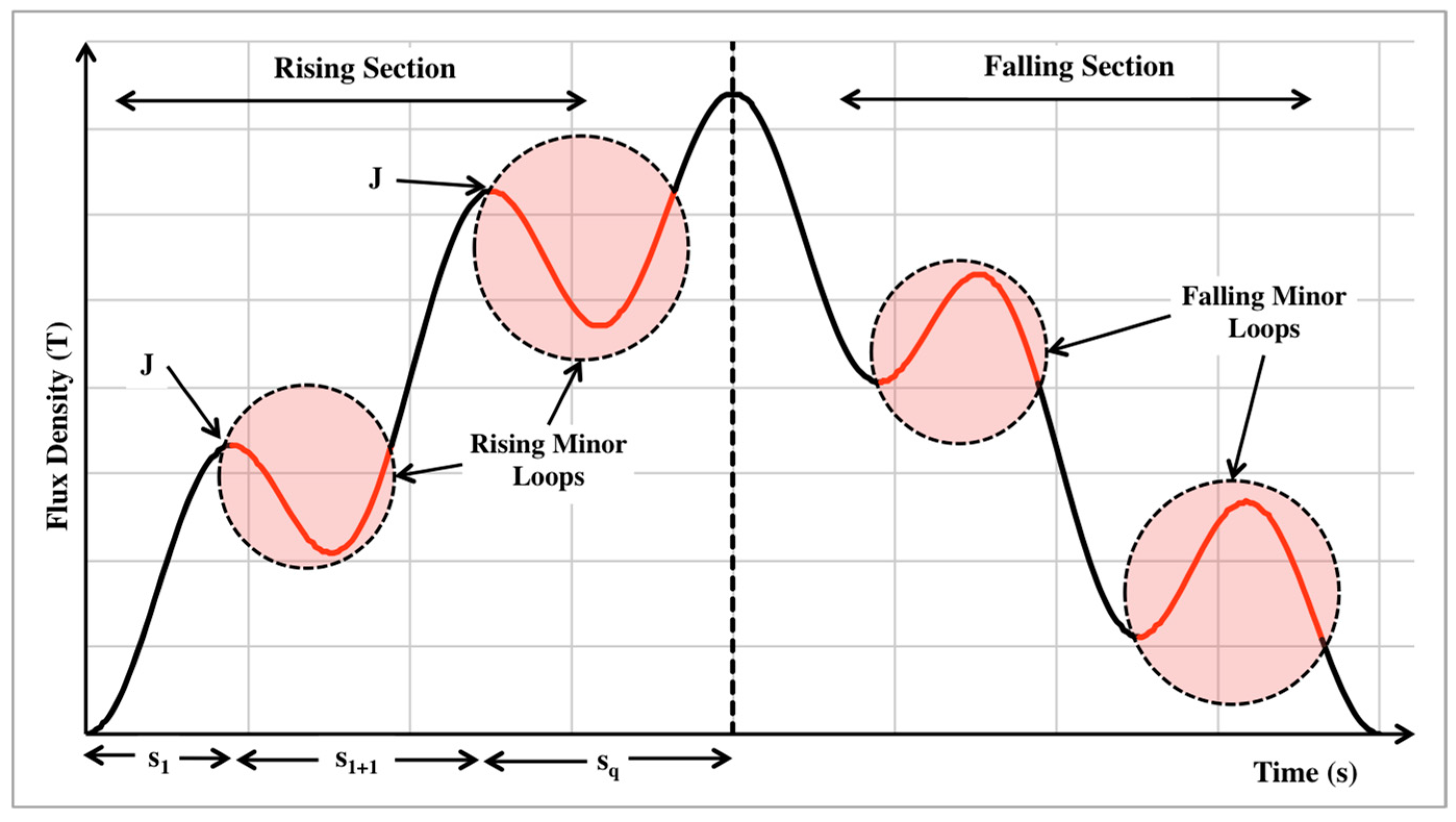
3.2. Core Losses
4. Results
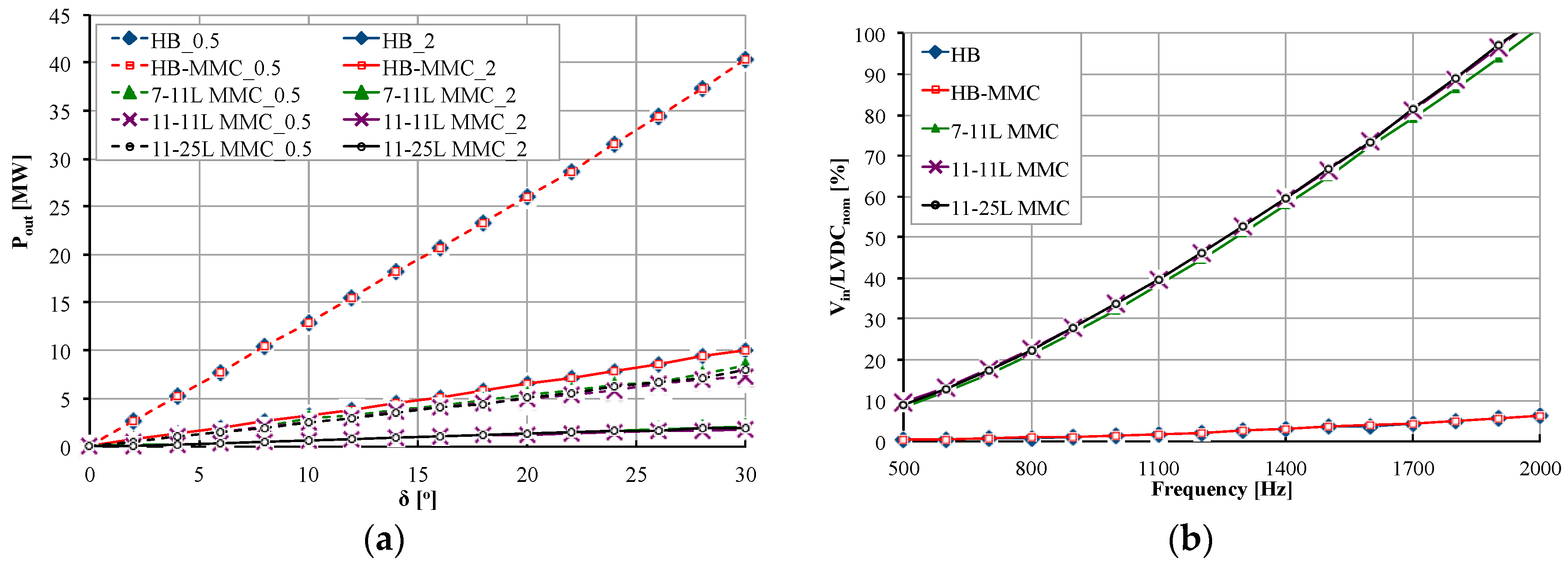
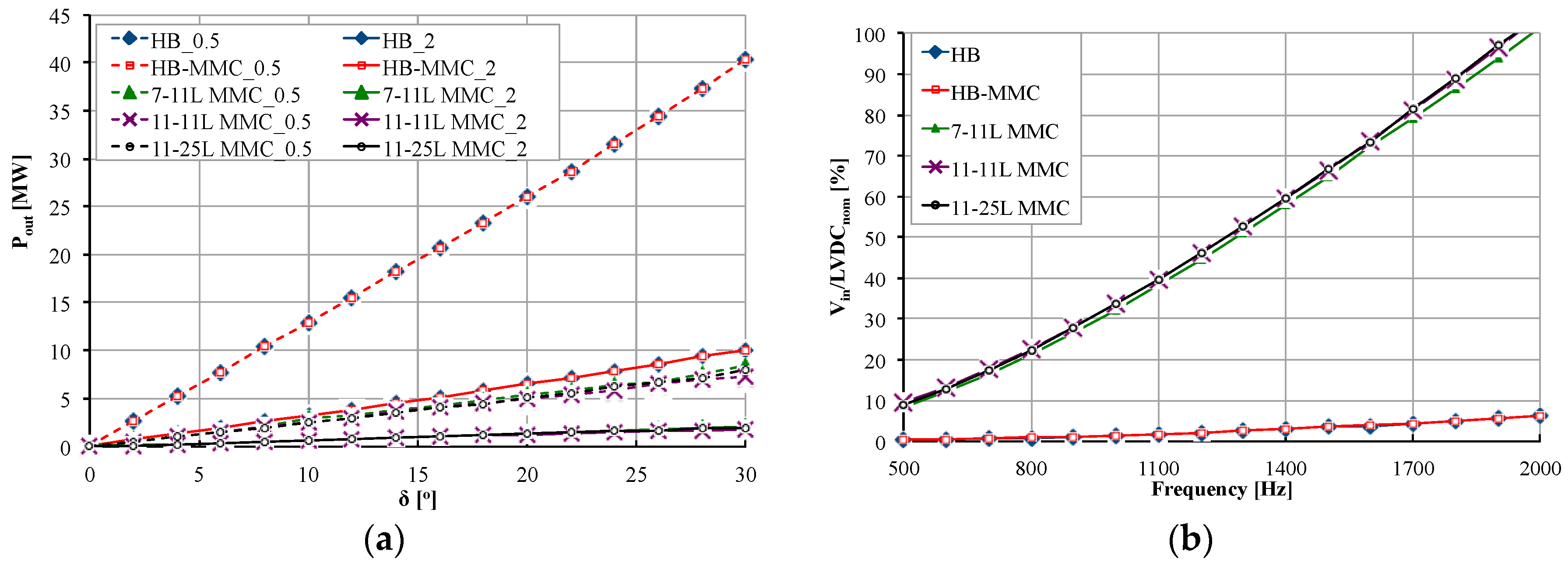
4.1. Power Control
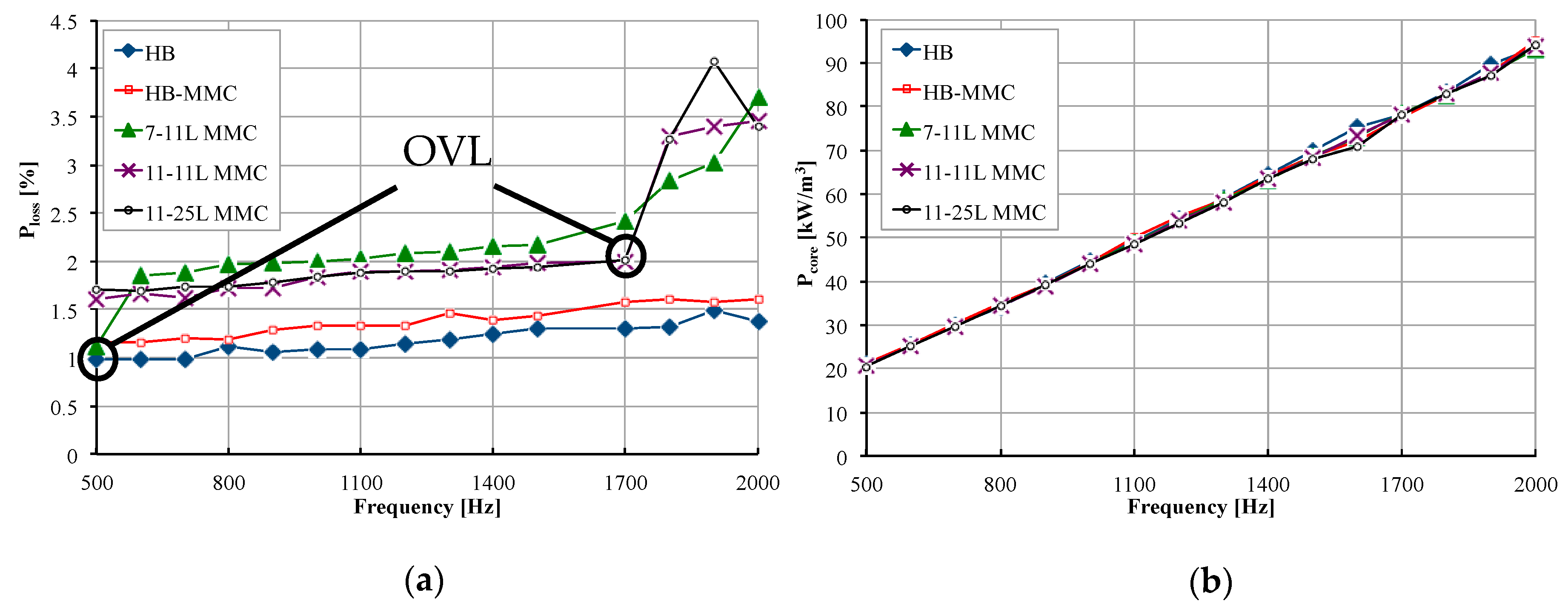
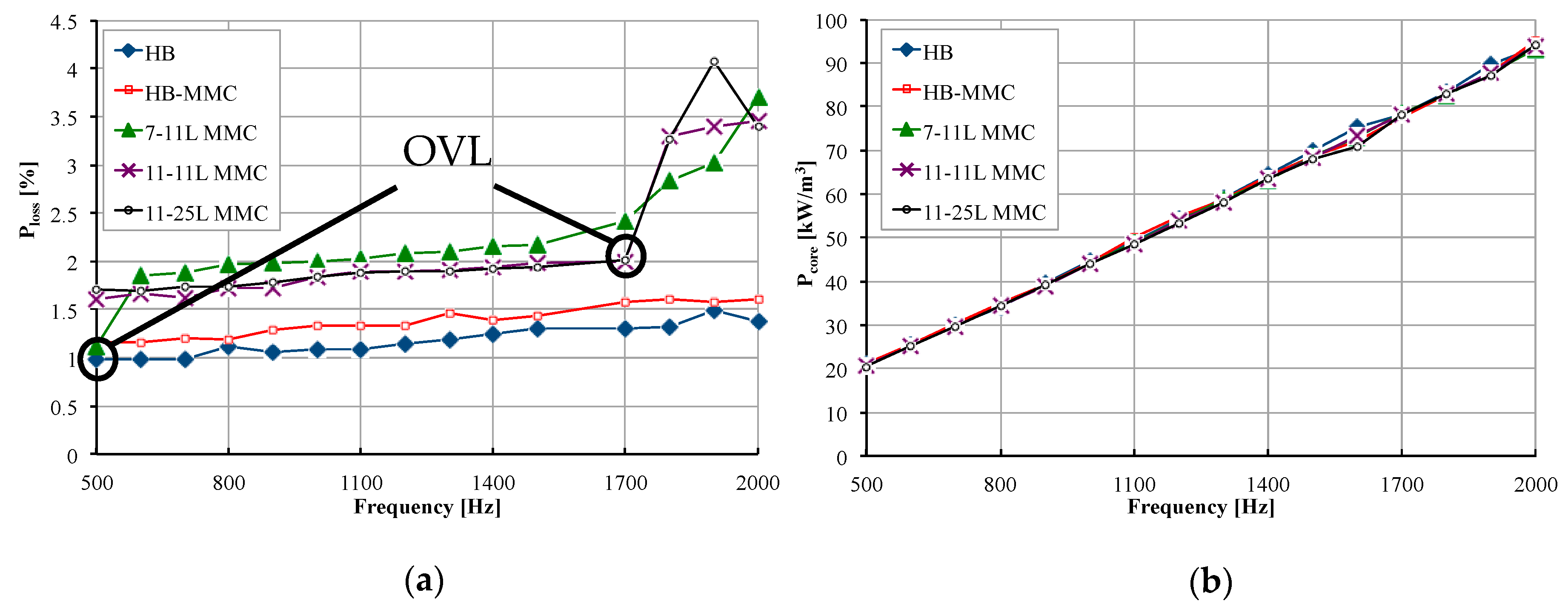
4.2. System Losses
5. Discussion
6. Conclusions
Acknowledgments
Author contributions
Conflicts of Interest
References
- Van Eeckhout, B.; Van Hertem, D.; Reza, M.; Srivastava, K.; Belmans, R. Economic comparison of VSC HVDC and HVAC as transmission system for a 300 MW offshore wind farm. Eur. Trans. Electr. Power 2010, 20, 661–671. [Google Scholar] [CrossRef]
- Arapogianni, A.; Moccia, J.; Wilkes, J. The European Offshore Wind Industry—Key Treds and Statistics 2012; European Wind Energy Association: Brussels, Belgium, 2013. [Google Scholar]
- Northland Power Acquires Majority Equity Stake in North Sea Offshore Wind Farms From RWE Innogy. Available online: http://www.northlandpower.ca/Investor-Centre/News--Events/Recent_Press_Releases.aspx?MwID=1873377 (accessed on 2 February 2015).
- Giller, P. Multi-Contracting for the First Project Financing in the German Offshore Wind Market: Projekt Offshore Wind Farm Meerwind Sud/Ost [288 MW Offshore Wind Farm]; WindMW GmbH: Bremerhaven, Germany, 2012. [Google Scholar]
- Pulzer, M. Innovation for Offshore Substations. Real Power 2014, 35, 18–22. [Google Scholar]
- Ng, C.; McKeever, P. Next generation HVDC network for offshore renewable energy industry. In Proceedings of the 10th IET International Conference on AC and DC Power Transmission (ACDC 2012), Birmingham, UK, 4–5 December 2012; pp. 1–7. [Google Scholar]
- Smailes, M.; Ng, C.; Shek, J.; Abusara, M.; Theotokatos, G.; McKeever, P. Hybrid, multi-megawatt HVDC transformer for future offshore wind farms. In Proceedings of the 3rd Renewable Power Generation Conference RPG 2014, Naples, Italy, 24–25 September 2014; pp. 1–6. [Google Scholar]
- Jovcic, D. Bidirectional, High-Power DC Transformer. IEEE Trans. Power Deliv. 2009, 24, 2276–2283. [Google Scholar] [CrossRef]
- Denniston, N.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. Multiple-Module High-Gain High-Voltage DC-DC Transformers for Offshore Wind Energy Systems. IEEE Trans. Ind. Electron. 2011, 58, 1877–1886. [Google Scholar] [CrossRef]
- Li, H.; Bai, X.; Wu, J. Study on modeling of high frequency power pulse transformer. In Proceedings of the World Automation Congress 2008(WAC 2008), Hawaii, HI, USA, 28 September–2 October 2008; pp. 1–5. [Google Scholar]
- Ortiz, G.; Biela, J.; Bortis, D.; Kolar, J.W. 1 Megawatt, 20 kHz, isolated, bidirectional 12kV to 1.2kV DC-DC converter for renewable energy applications. In Proceedings of the 2010 International Power Electronics Conference (IPEC), Sapporo, Japan, 21–24 June 2010; pp. 3212–3219. [Google Scholar]
- Zhou, Y.; Macpherson, D.E.; Blewitt, W.; Jovcic, D. Comparison of DC-DC converter topologies for offshore wind-farm application. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives PEMD 2012, Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar]
- De Doncker, R.W.; Divan, D.M.; Kheraluwala, M.H. A three-phase soft-switched high-power-density DC/DC converter for high-power applications. IEEE Trans. Ind. Appl. 1991, 27, 63–73. [Google Scholar] [CrossRef]
- Meier, S.; Kjellqvist, T.; Norrga, S.; Nee, H.-P. Design considerations for medium-frequency power transformers in offshore wind farms. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–12. [Google Scholar]
- Ortiz, G.; Biela, J.; Kolar, J.W. Optimized design of medium frequency transformers with high isolation requirements. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 631–638. [Google Scholar]
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-Based HVDC Power Transmission Systems: An Overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Zhong, Y.; Finney, S.; Holliday, D. An investigation of high efficiency DC-AC converters for LVDC distribution networks. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar]
- Marquardt, R. Modular Multilevel Converter: An universal concept for HVDC-Networks and extended DC-Bus-applications. In Proceedings of the 2010 International Power Electronics Conference (IPEC), Sapporo, Japan, 21–24 June 2010; pp. 502–507. [Google Scholar]
- Luth, T.; Merlin, M.M.C.; Green, T.C.; Hassan, F.; Barker, C.D. High-Frequency Operation of a DC/AC/DC System for HVDC Applications. IEEE Trans. Power Electron. 2014, 29, 4107–4115. [Google Scholar] [CrossRef]
- Smailes, M.; Ng, C.; McKeever, P.; Fox, R.; Knos, M.; Shek, J. A modular, multi-megawatt, hybrid HVDC transformer for offshore wind power collection and distribution. In Proceedings of the EWEA Offshore Wind Energy Conference, Paris, France, 17–20 November 2015. [Google Scholar]
- Rohner, S.; Bernet, S.; Hiller, M.; Sommer, R. Modulation, Losses, and Semiconductor Requirements of Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2010, 57, 2633–2642. [Google Scholar] [CrossRef]
- Mühlethaler, J.; Biela, J.; Kolar, J.W.; Ecklebe, A. Improved core-loss calculation for magnetic components employed in power electronic systems. IEEE Trans. Power Electron. 2012, 27, 964–973. [Google Scholar] [CrossRef]
- Bertotti, G. General properties of power losses in soft ferromagnetic materials. IEEE Trans. Magn. 1988, 24, 621–630. [Google Scholar] [CrossRef]
- Hargreaves, P.A.; Mecrow, B.C.; Hall, R. Calculation of iron loss in electrical generators using finite element analysis. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference IEMDC, Niagara Falls, ON, Canada, 15–18 May 2011; pp. 1368–1373. [Google Scholar]
- Villar, I.; Viscarret, U.; Etxeberria-Otadui, I.; Rufer, A. Global Loss Evaluation Methods for Nonsinusoidally Fed Medium-Frequency Power Transformers. IEEE Trans. Ind. Electron. 2009, 56, 4132–4140. [Google Scholar] [CrossRef]
- Venkatachalam, K.; Sullivan, C.R.; Abdallah, T.; Tacca, H. Accurate prediction of ferrite core loss with nonsinusoidal waveforms using only Steinmetz parameters. In Proceedings of the 2002 IEEE Workshop on Computers in Power Electronics, Mayaguez, PR, USA, 3–4 June 2002; pp. 36–41. [Google Scholar]
- Smailes, M.; Ng, C.; Fox, R.; Shek, J.; Abusara, M.; Theotokatos, G.; McKeever, P. Evaluation of core loss calculation methods for highly non-sinusoidal inputs. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission (ACDC), Birmingham, UK, 10–12 February 2015. [Google Scholar]
- Tu, Q.; Xu, Z. Power losses evaluation for modular multilevel converter with junction temperature feedback. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–7. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency Range (Hz) | k | α | β |
|---|---|---|---|
| 500–2000 Hz | 230.76 | 1.09 | 2.81 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smailes, M.; Ng, C.; Mckeever, P.; Shek, J.; Theotokatos, G.; Abusara, M. Hybrid, Multi-Megawatt HVDC Transformer Topology Comparison for Future Offshore Wind Farms. Energies 2017, 10, 851. https://doi.org/10.3390/en10070851
Smailes M, Ng C, Mckeever P, Shek J, Theotokatos G, Abusara M. Hybrid, Multi-Megawatt HVDC Transformer Topology Comparison for Future Offshore Wind Farms. Energies. 2017; 10(7):851. https://doi.org/10.3390/en10070851
Chicago/Turabian StyleSmailes, Michael, Chong Ng, Paul Mckeever, Jonathan Shek, Gerasimos Theotokatos, and Mohammad Abusara. 2017. "Hybrid, Multi-Megawatt HVDC Transformer Topology Comparison for Future Offshore Wind Farms" Energies 10, no. 7: 851. https://doi.org/10.3390/en10070851
APA StyleSmailes, M., Ng, C., Mckeever, P., Shek, J., Theotokatos, G., & Abusara, M. (2017). Hybrid, Multi-Megawatt HVDC Transformer Topology Comparison for Future Offshore Wind Farms. Energies, 10(7), 851. https://doi.org/10.3390/en10070851