
Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
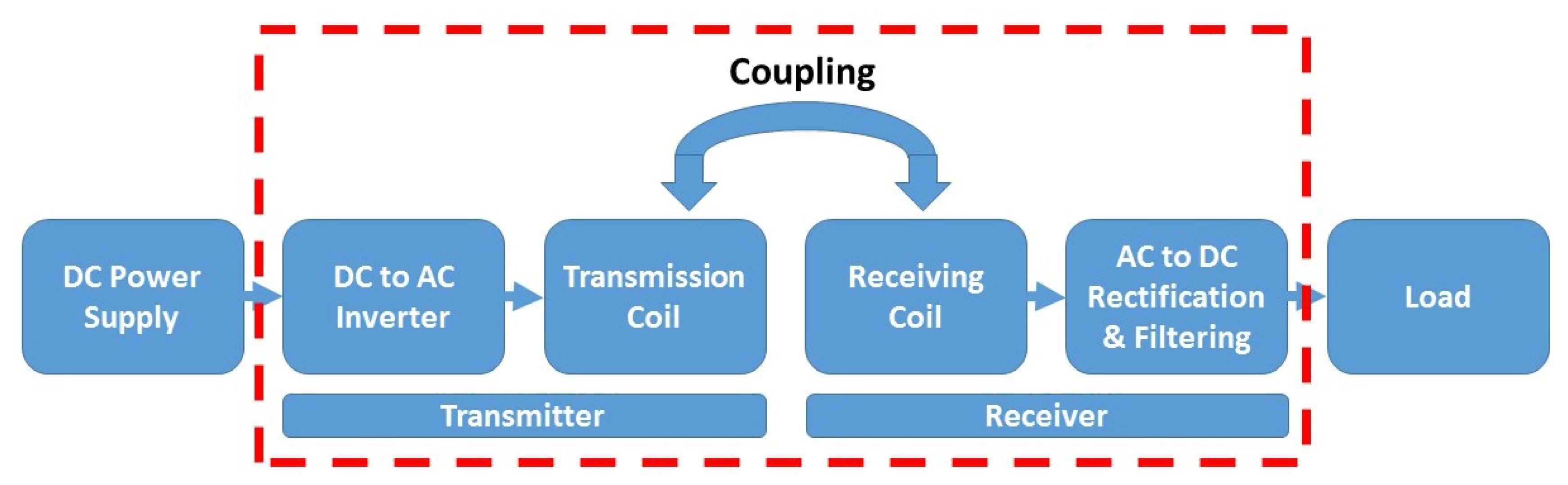
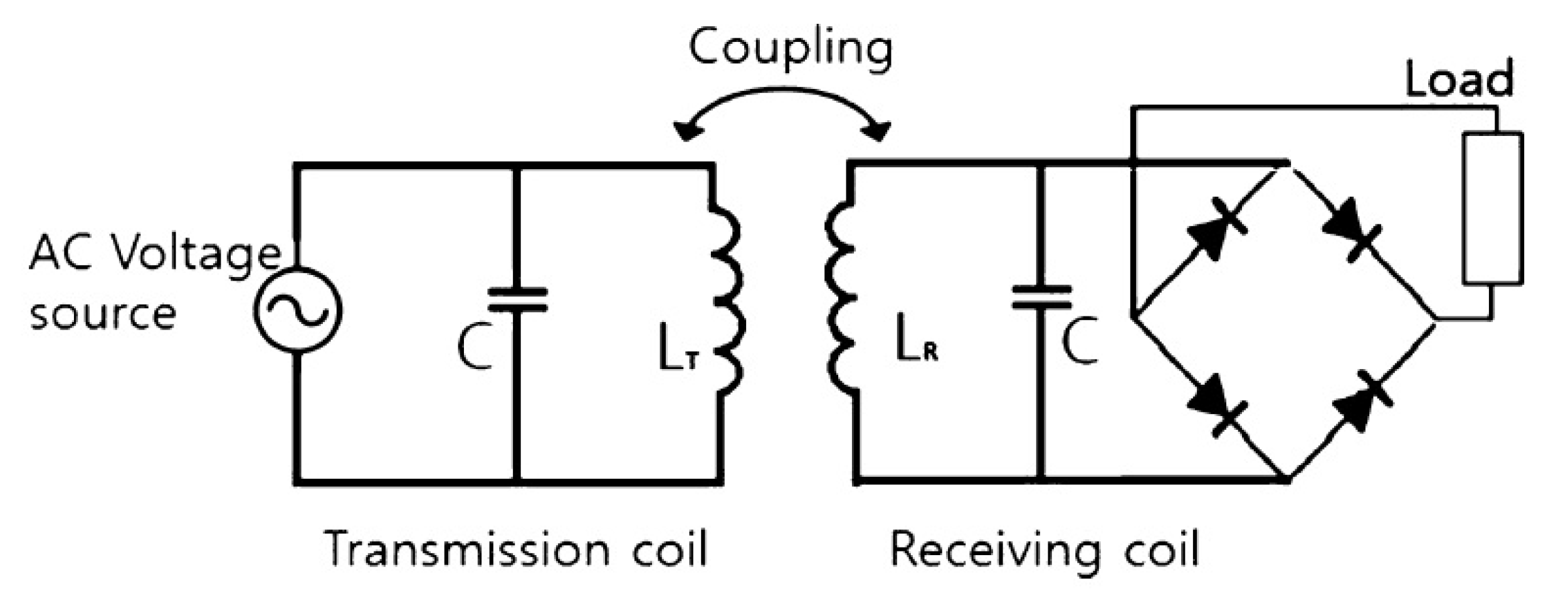
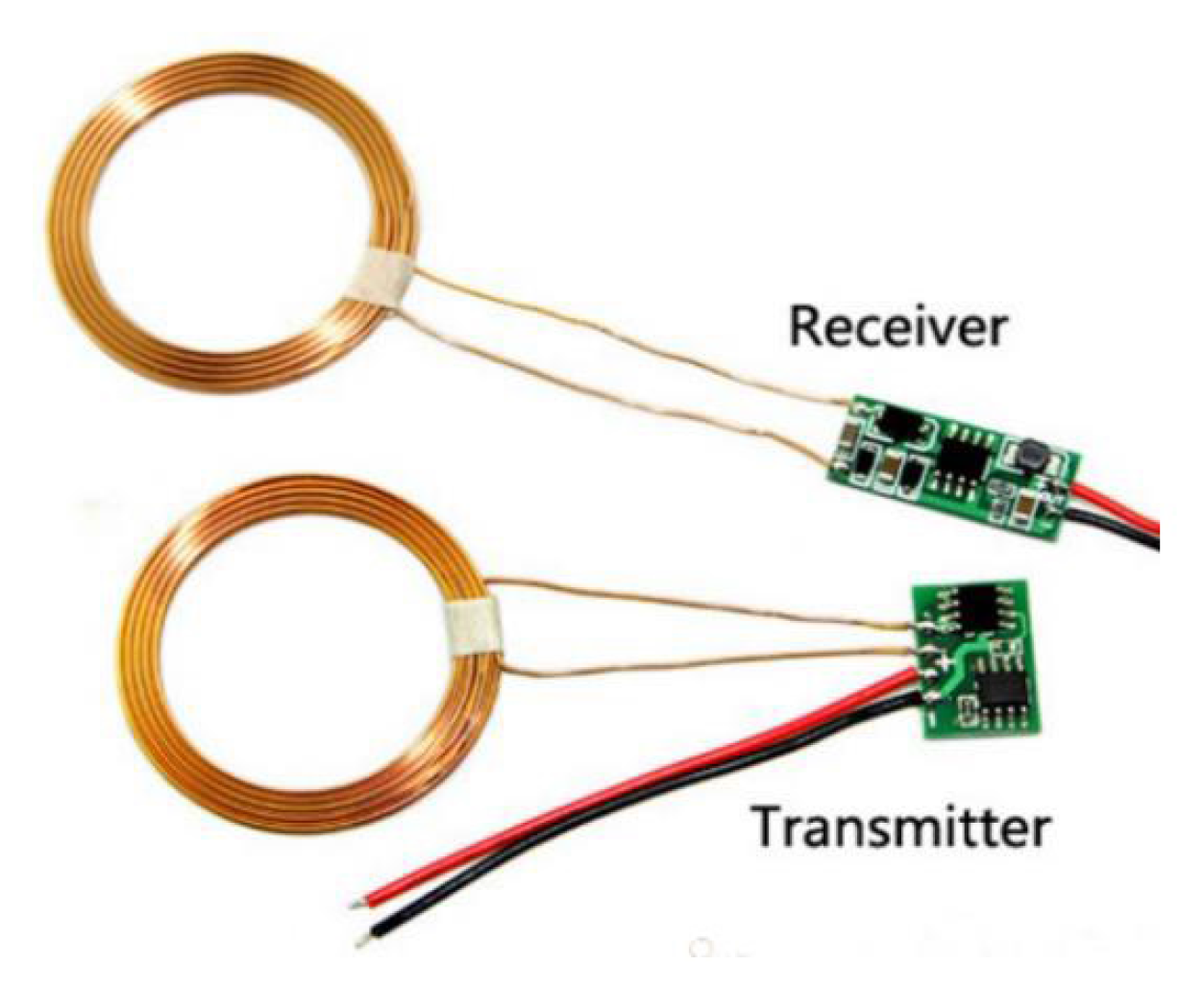
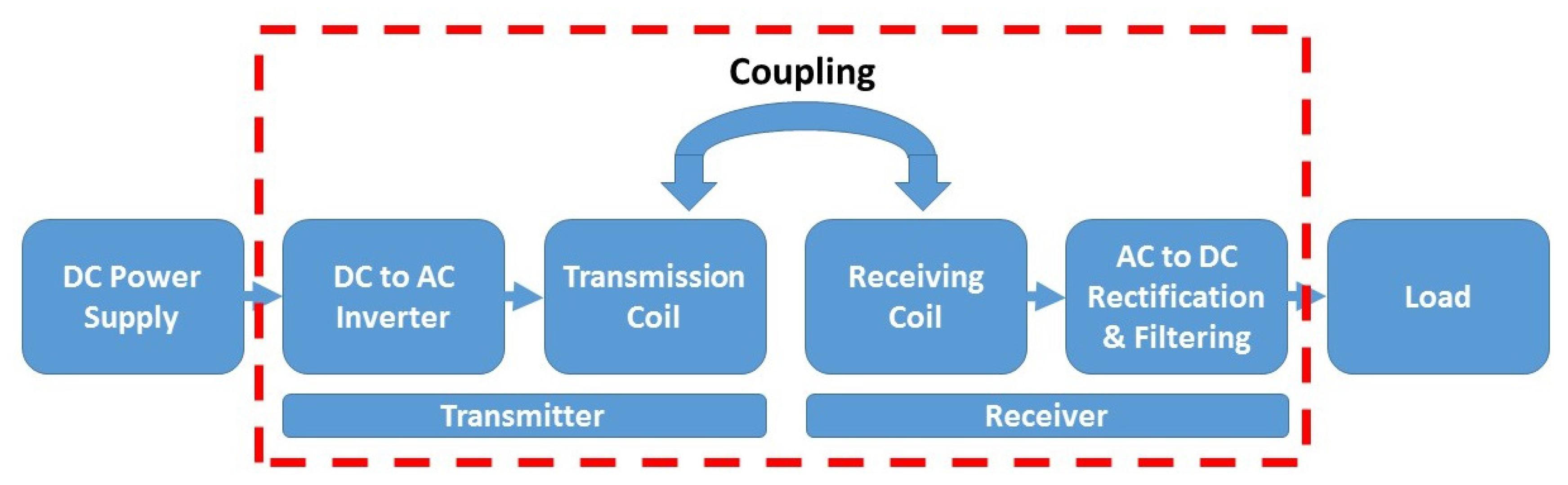
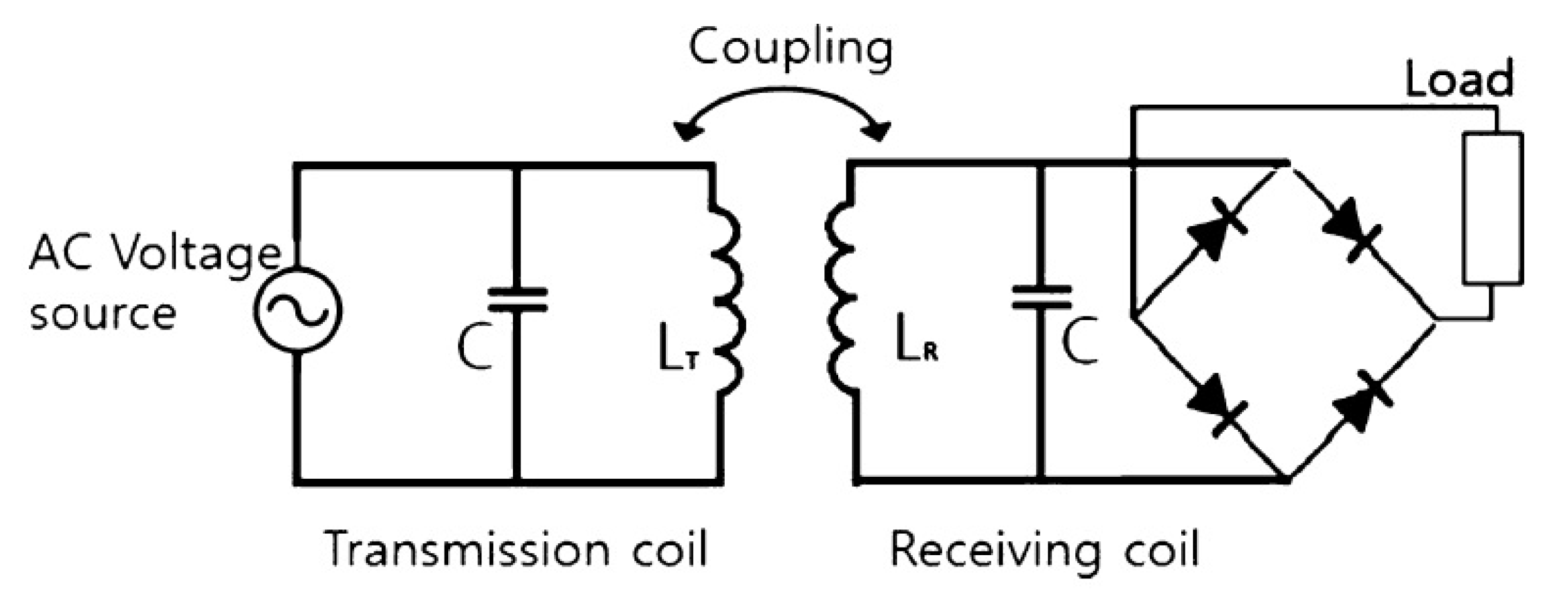
2.1. Wireless Power Transfer
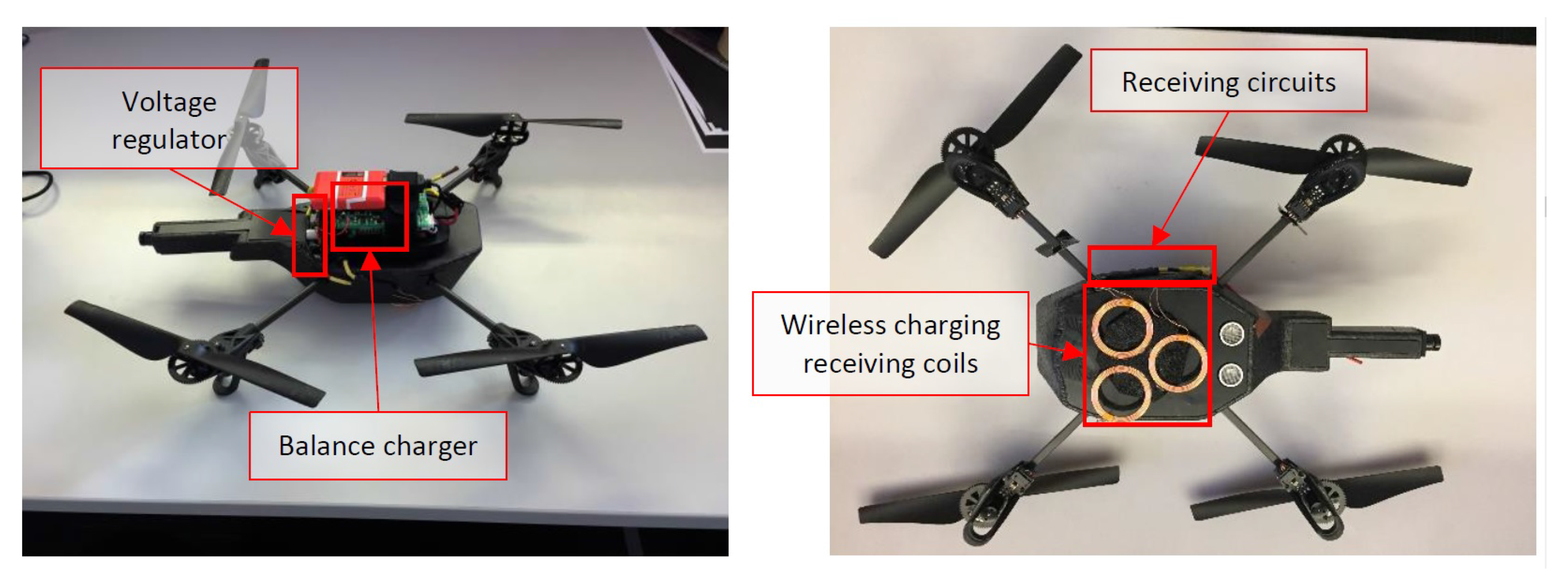
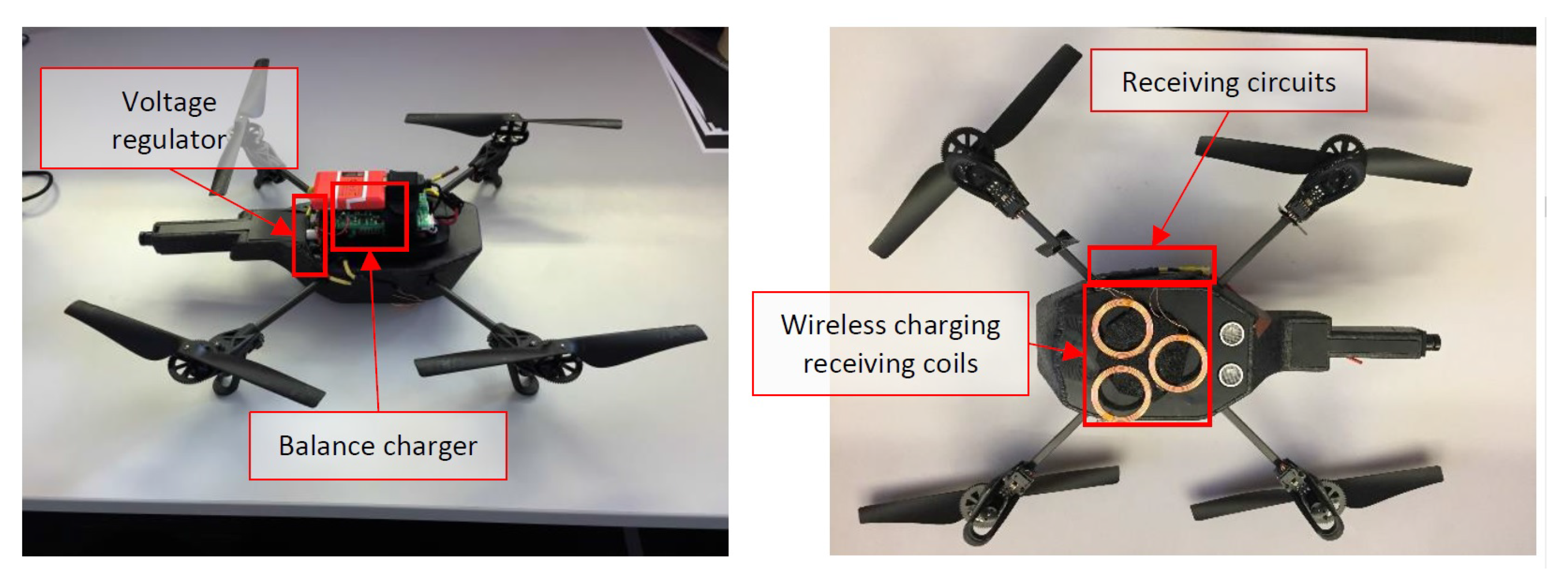
2.2. Unmanned Aerial Vehicle Platform
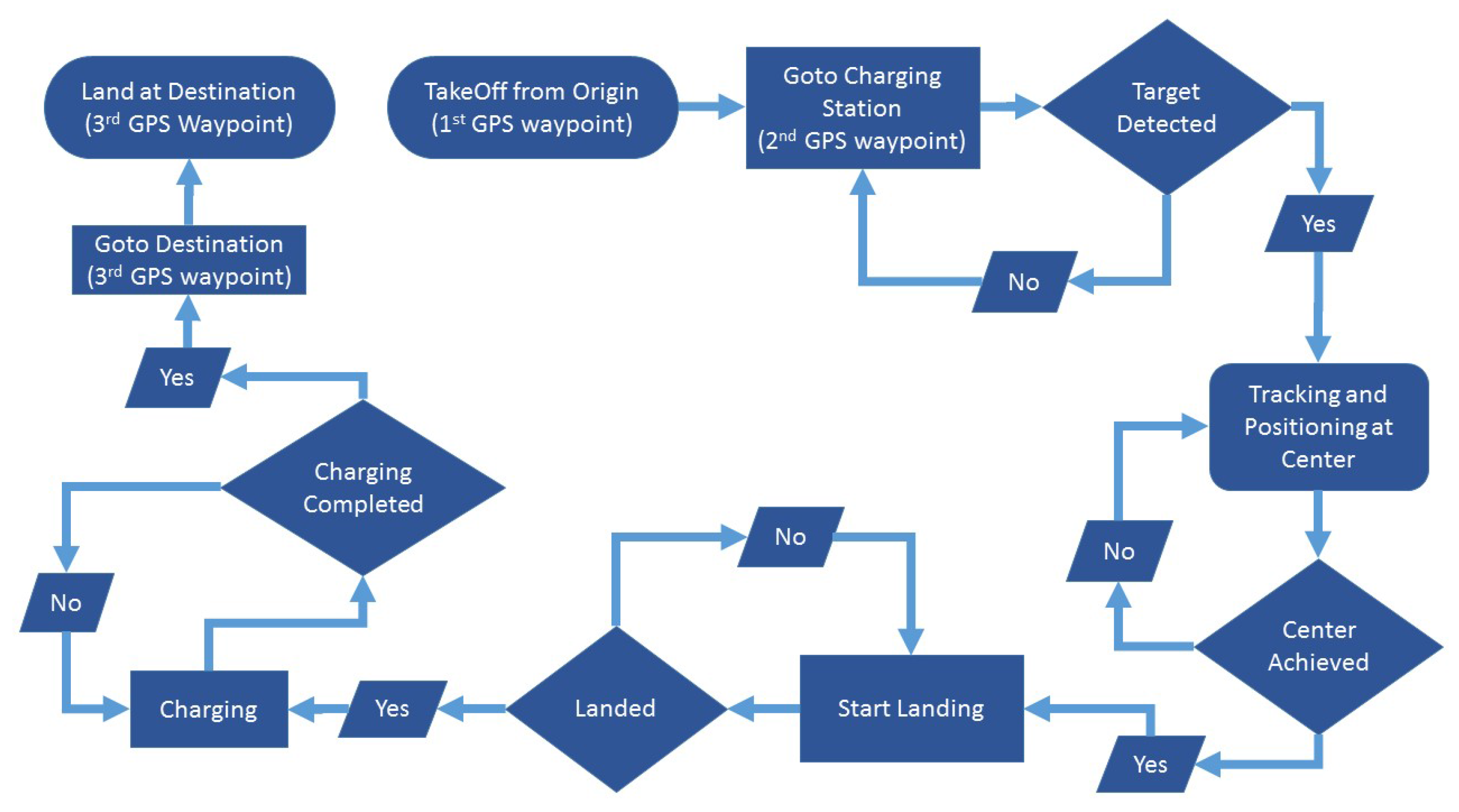
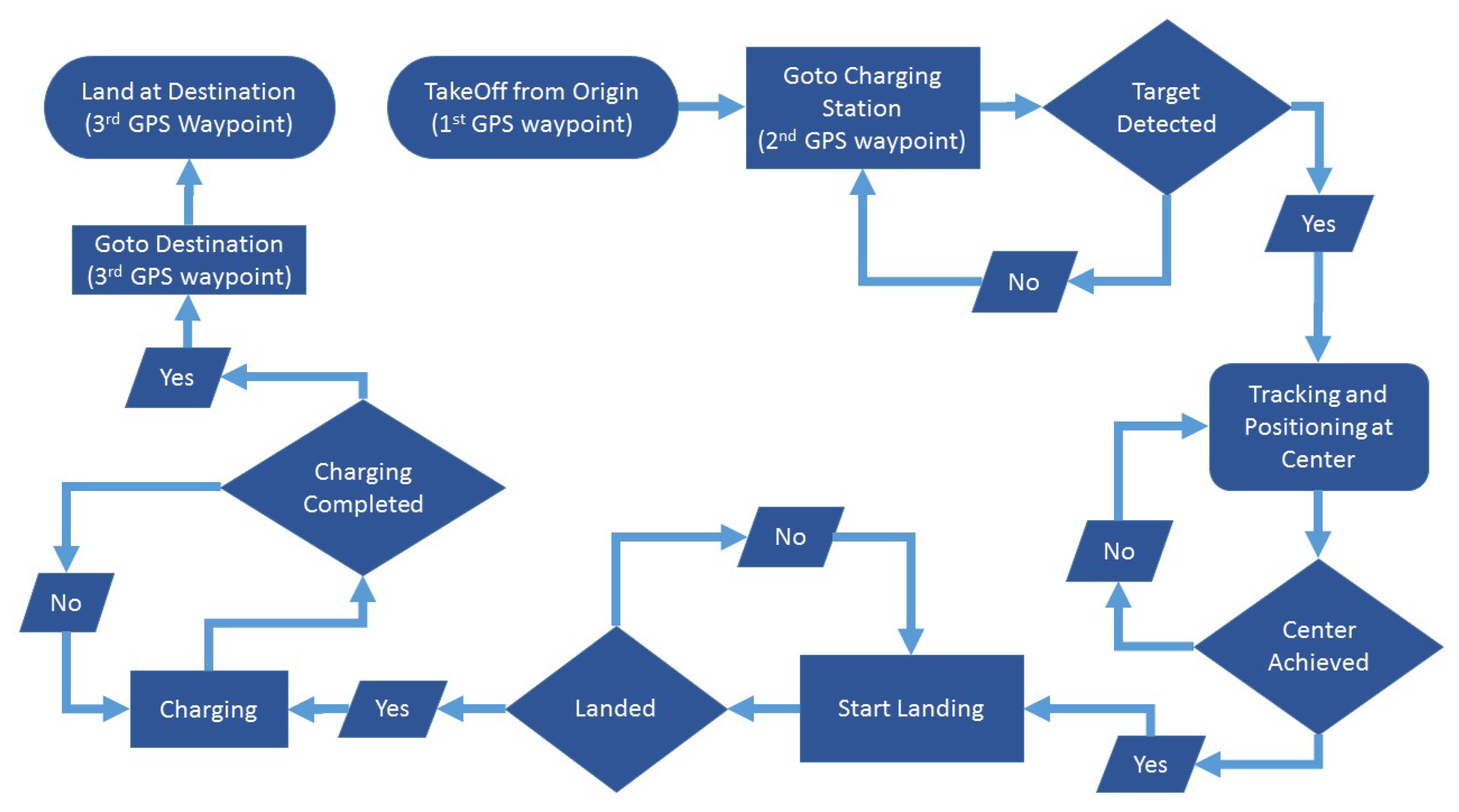
2.3. Control Scheme for Autonomous Charging and Persistent Mission
3. Experimental Setup
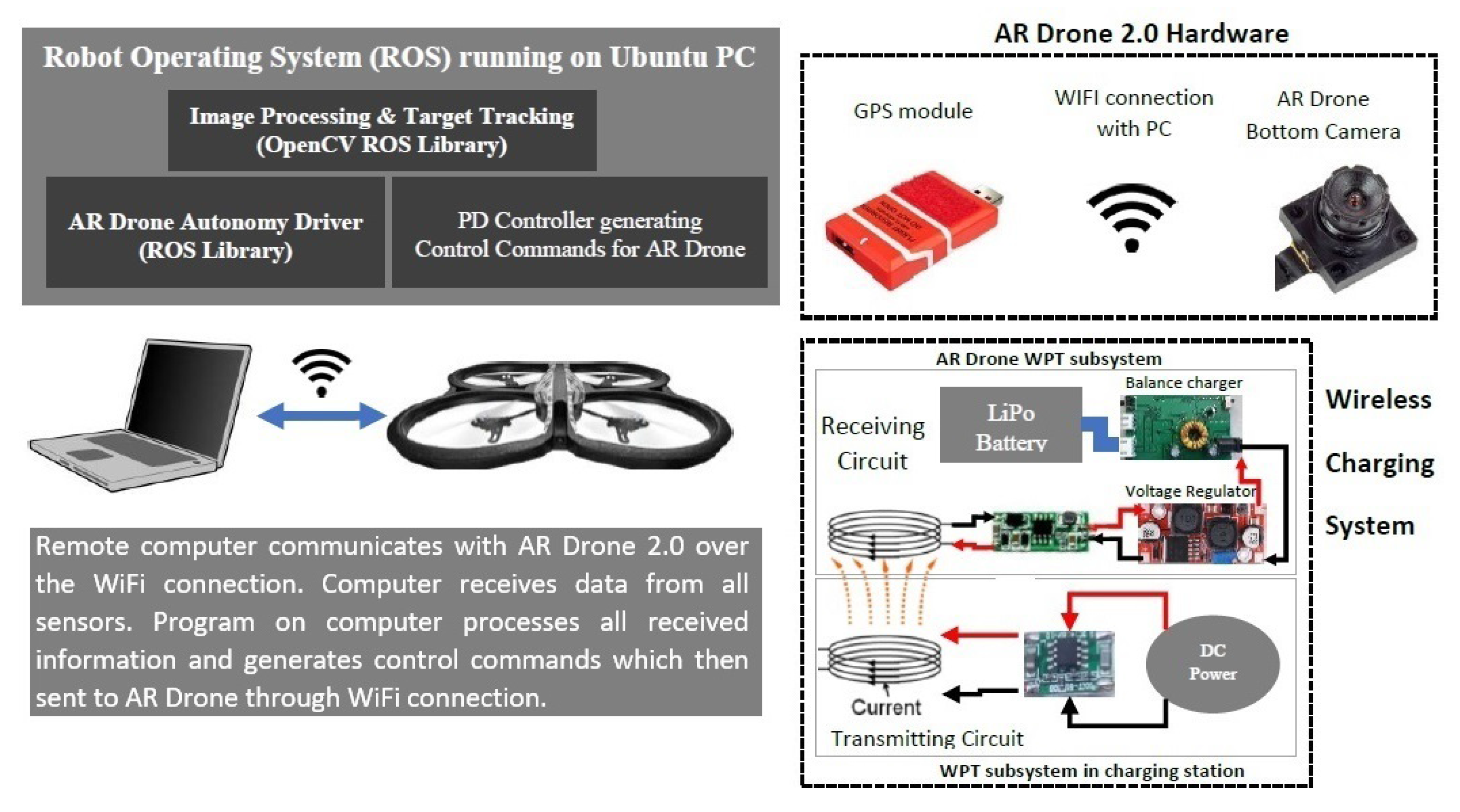
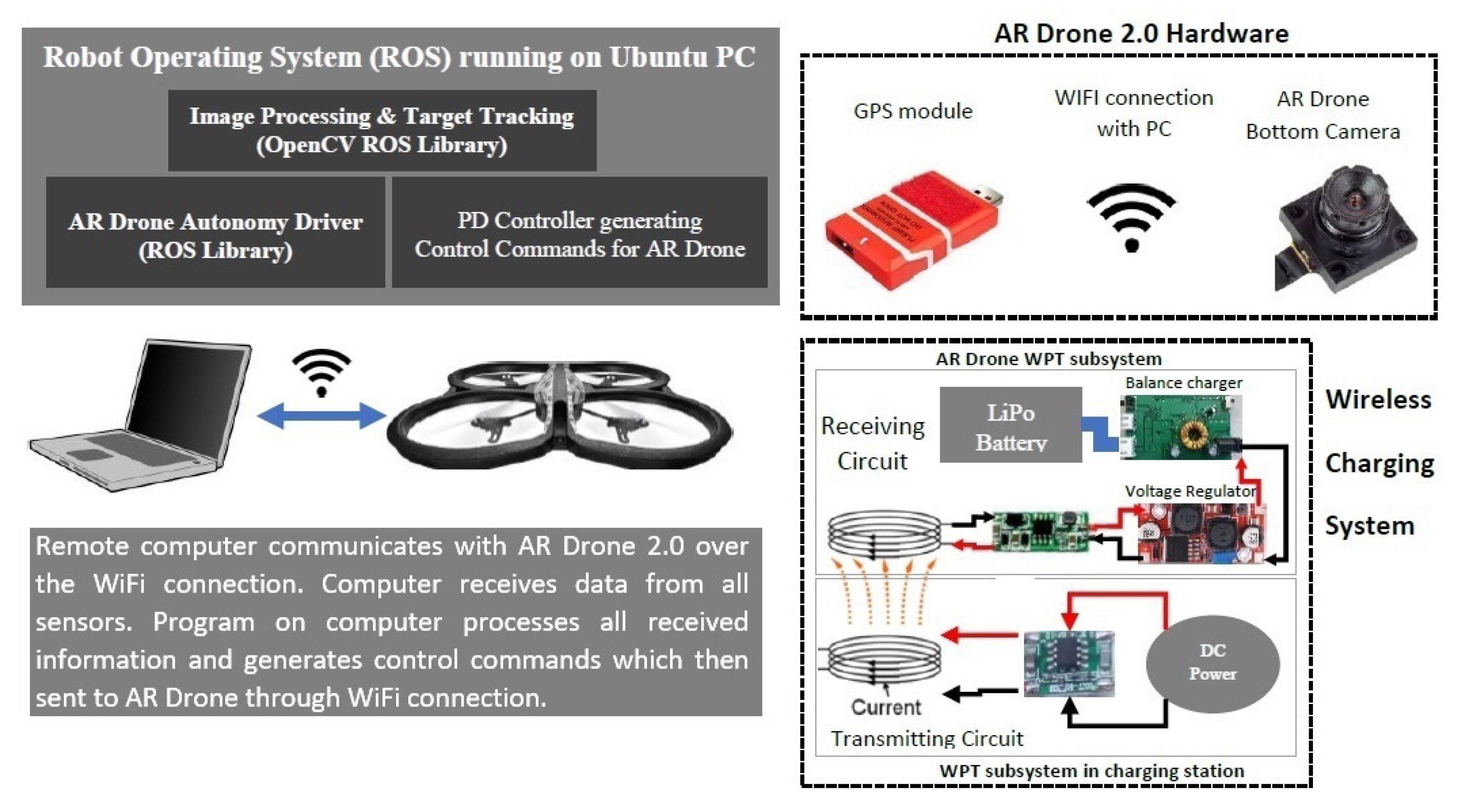
3.1. System Configuration
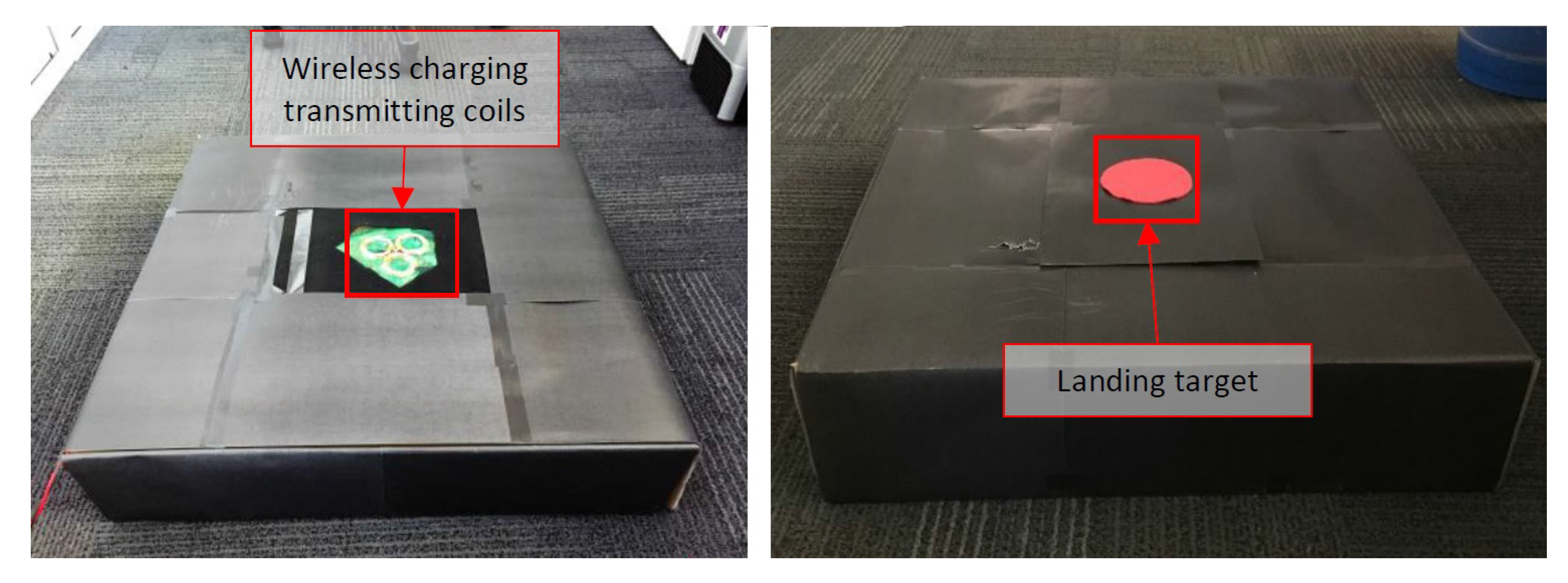
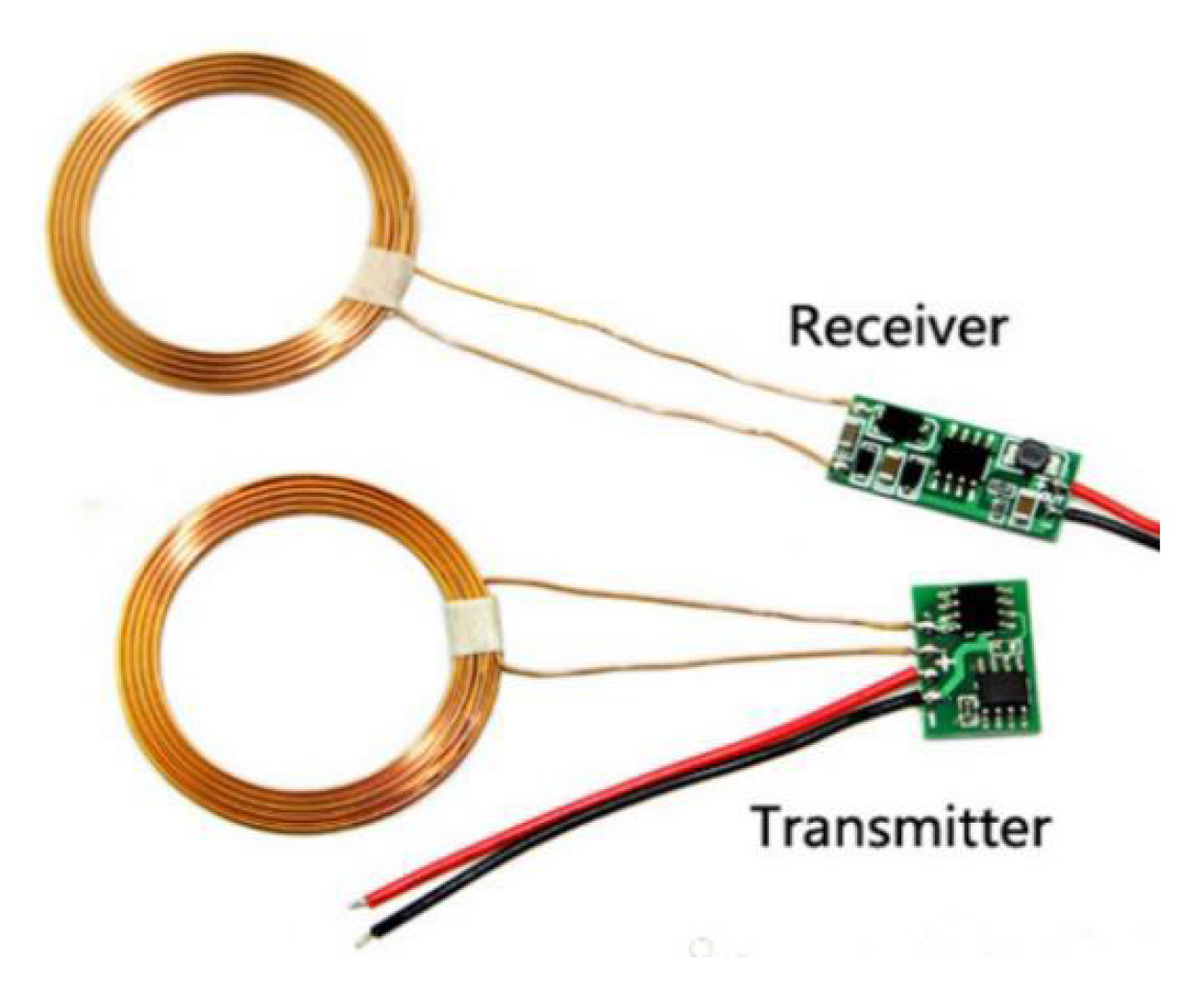
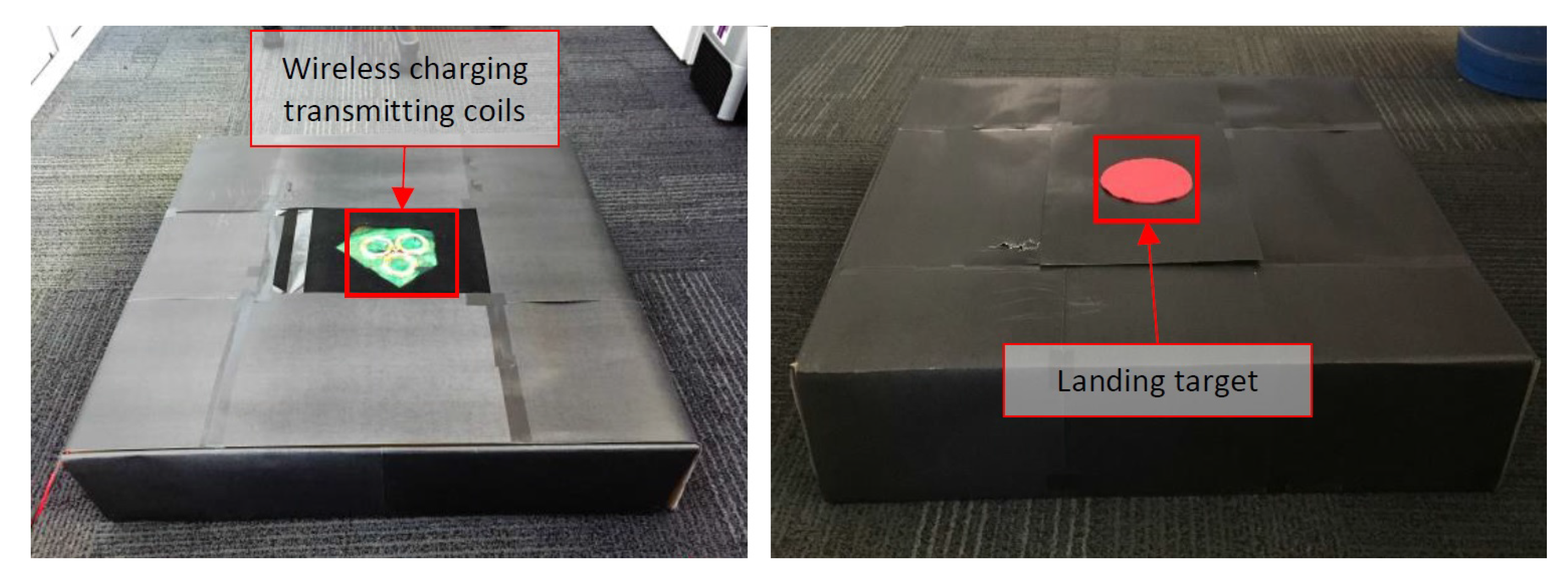
3.2. Wireless Charging Station
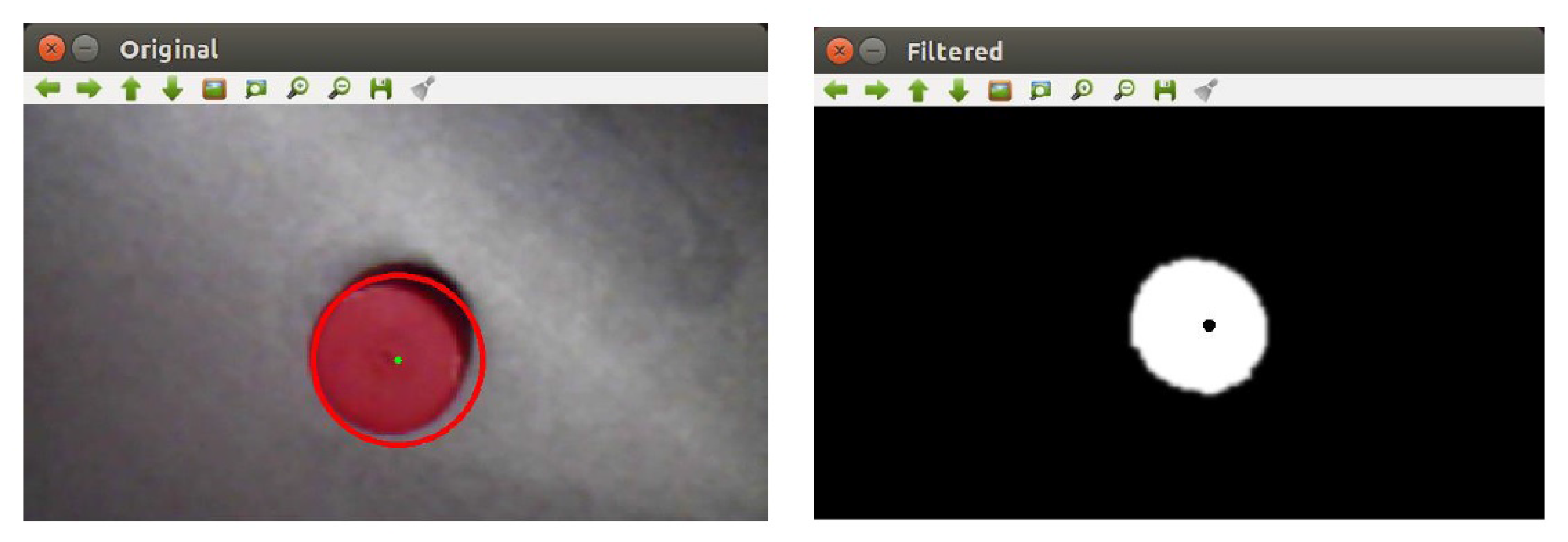
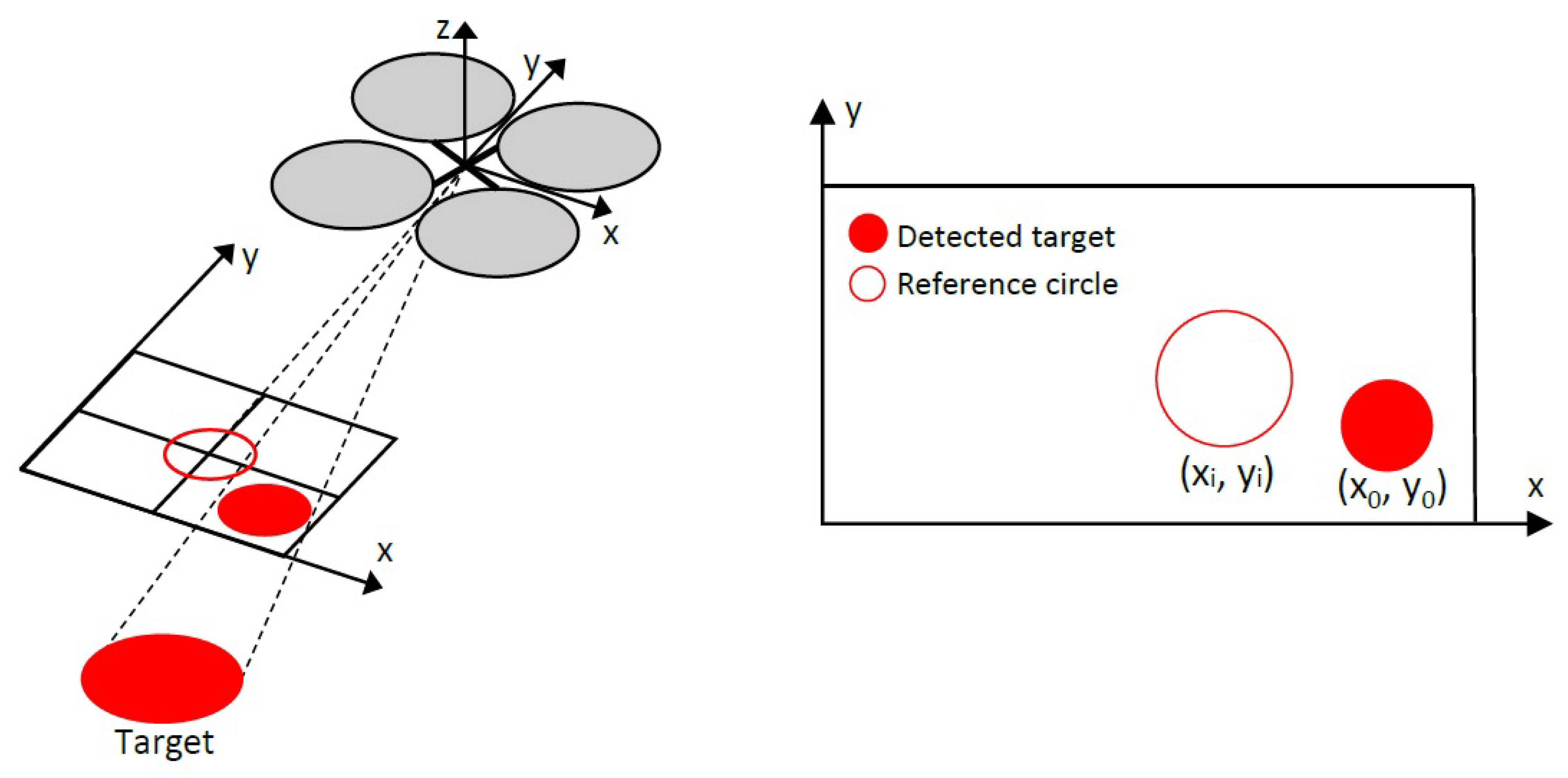
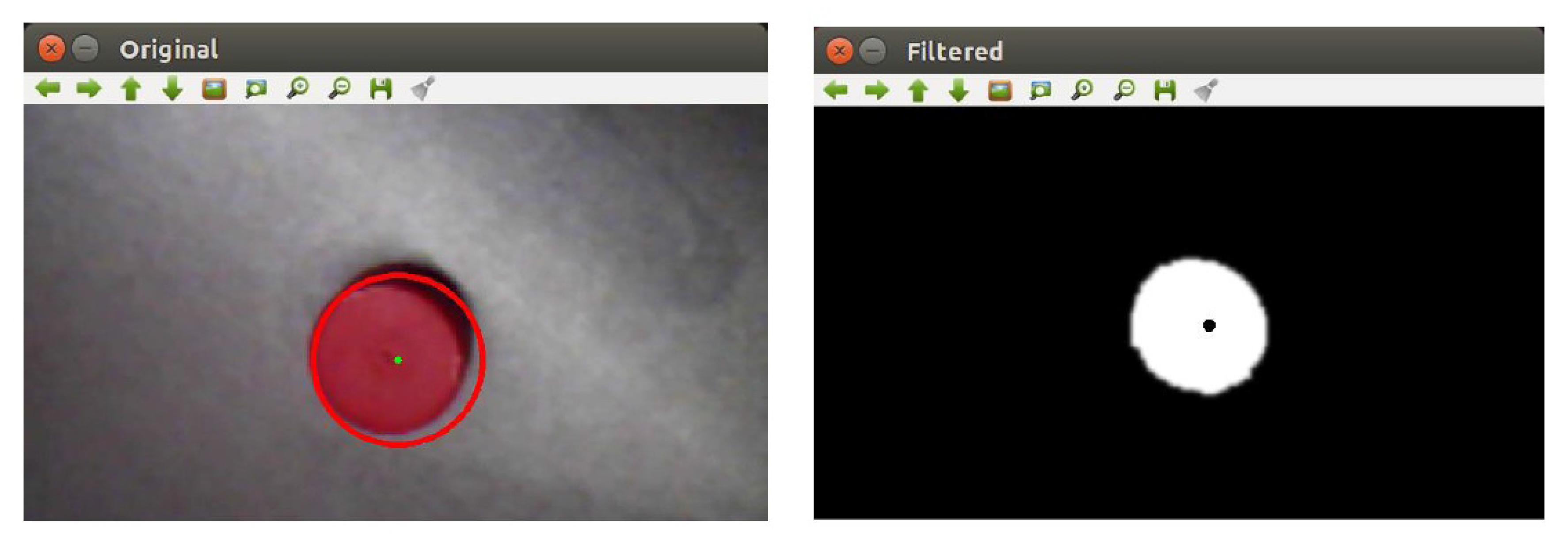
3.3. Target Detection Algorithm
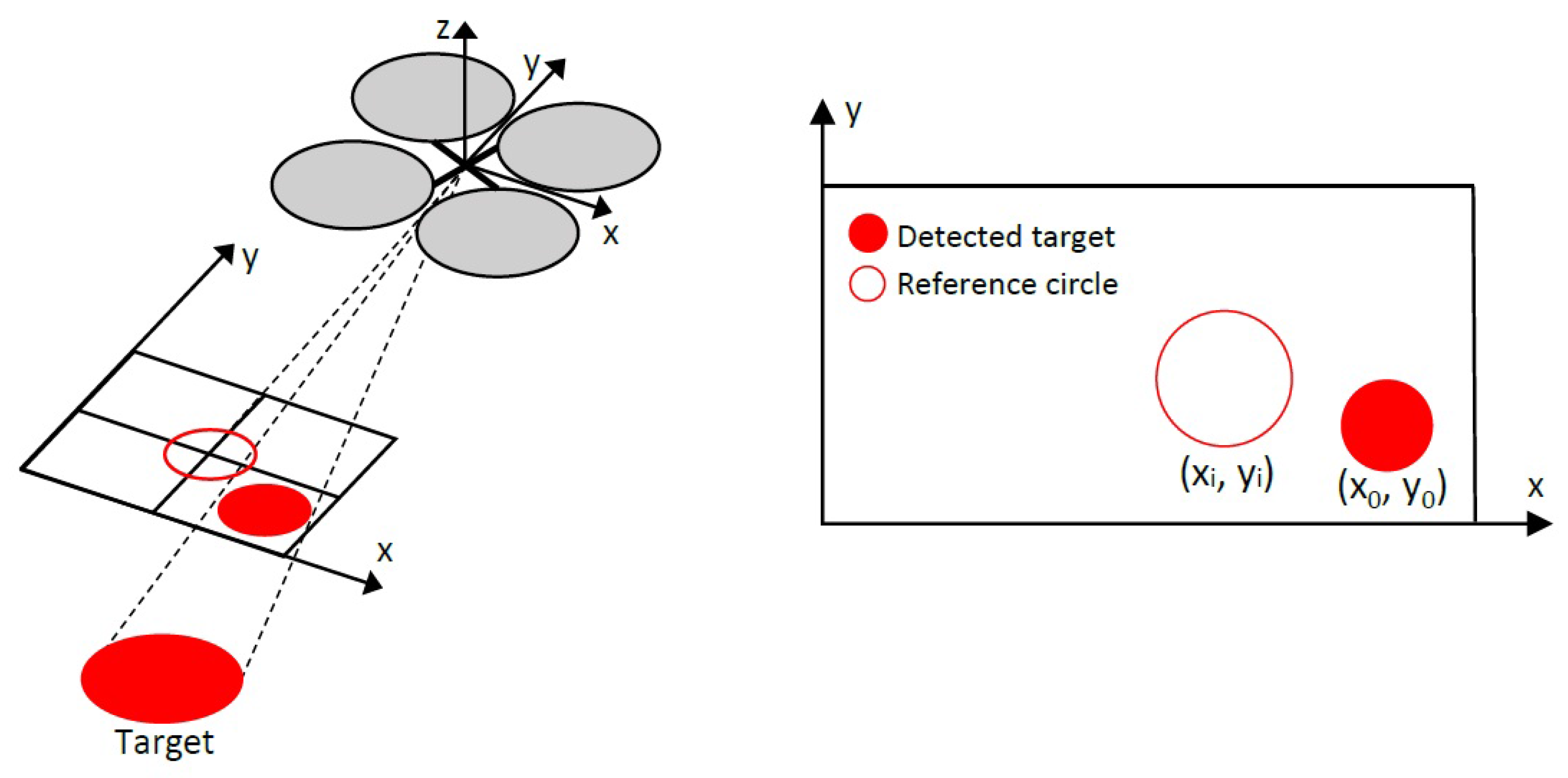
3.4. Tracking Control Based on Camera
4. Results and Discussion
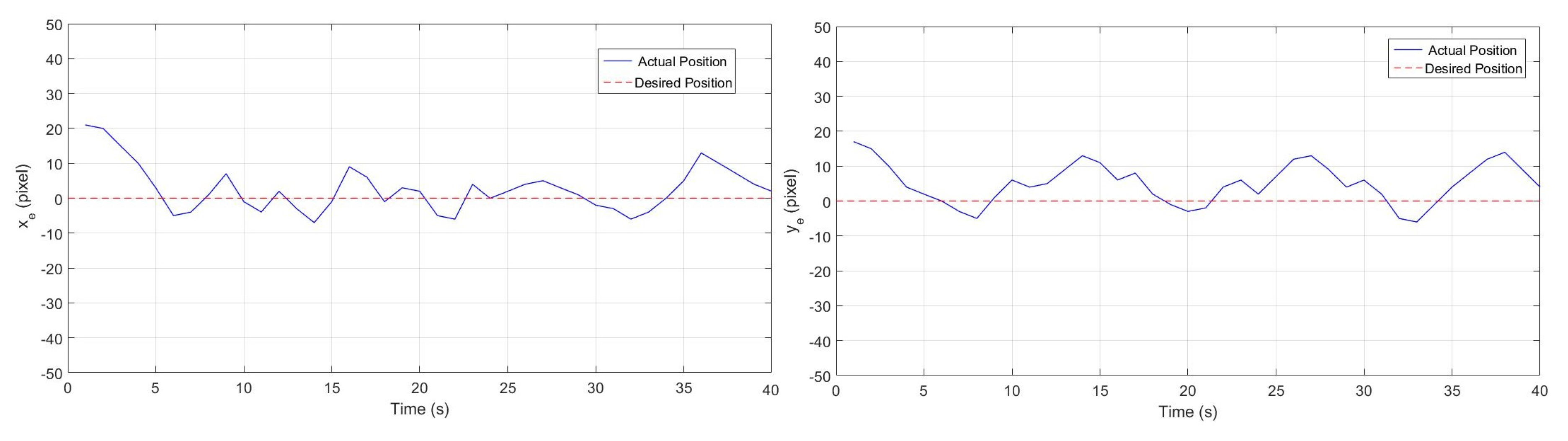
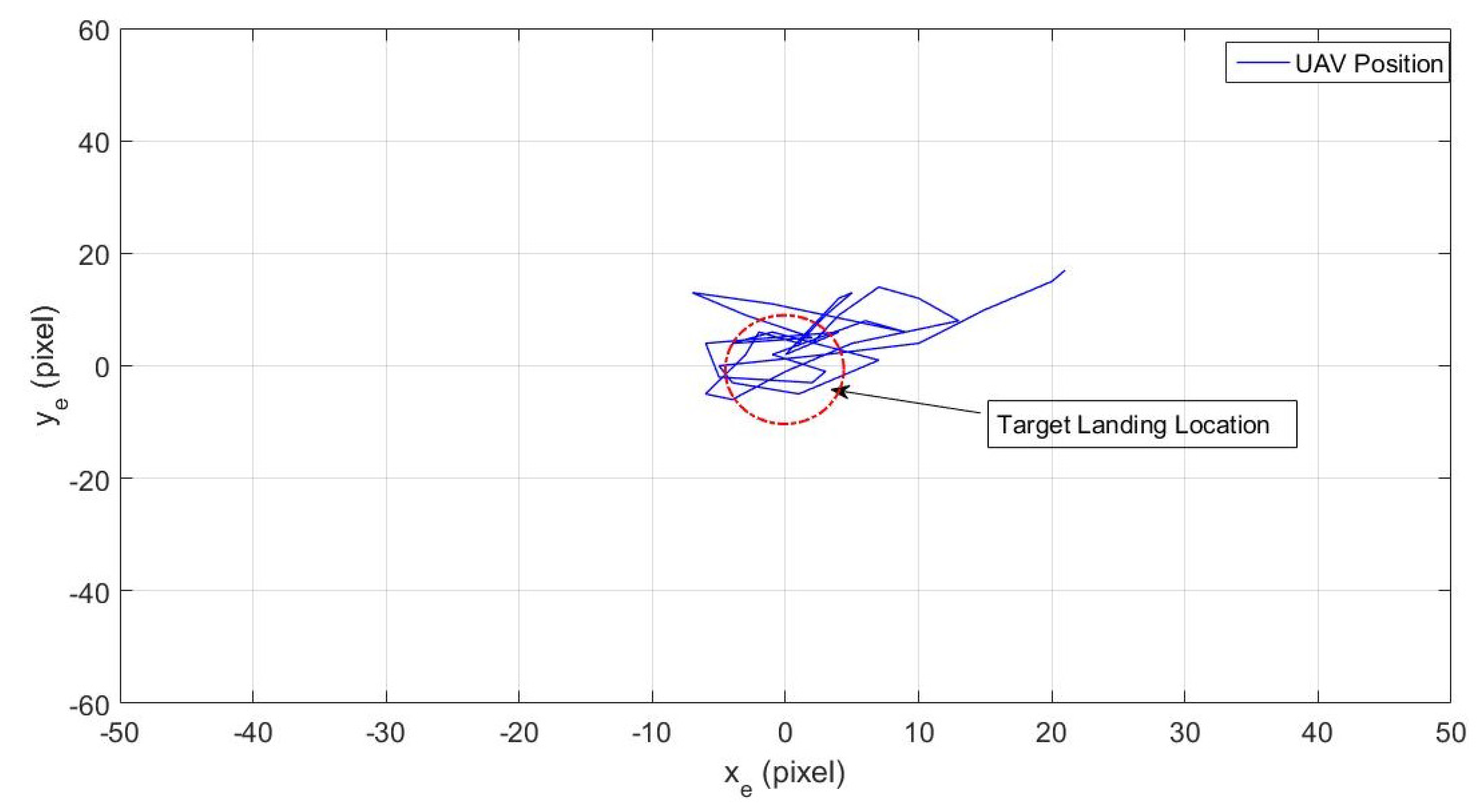
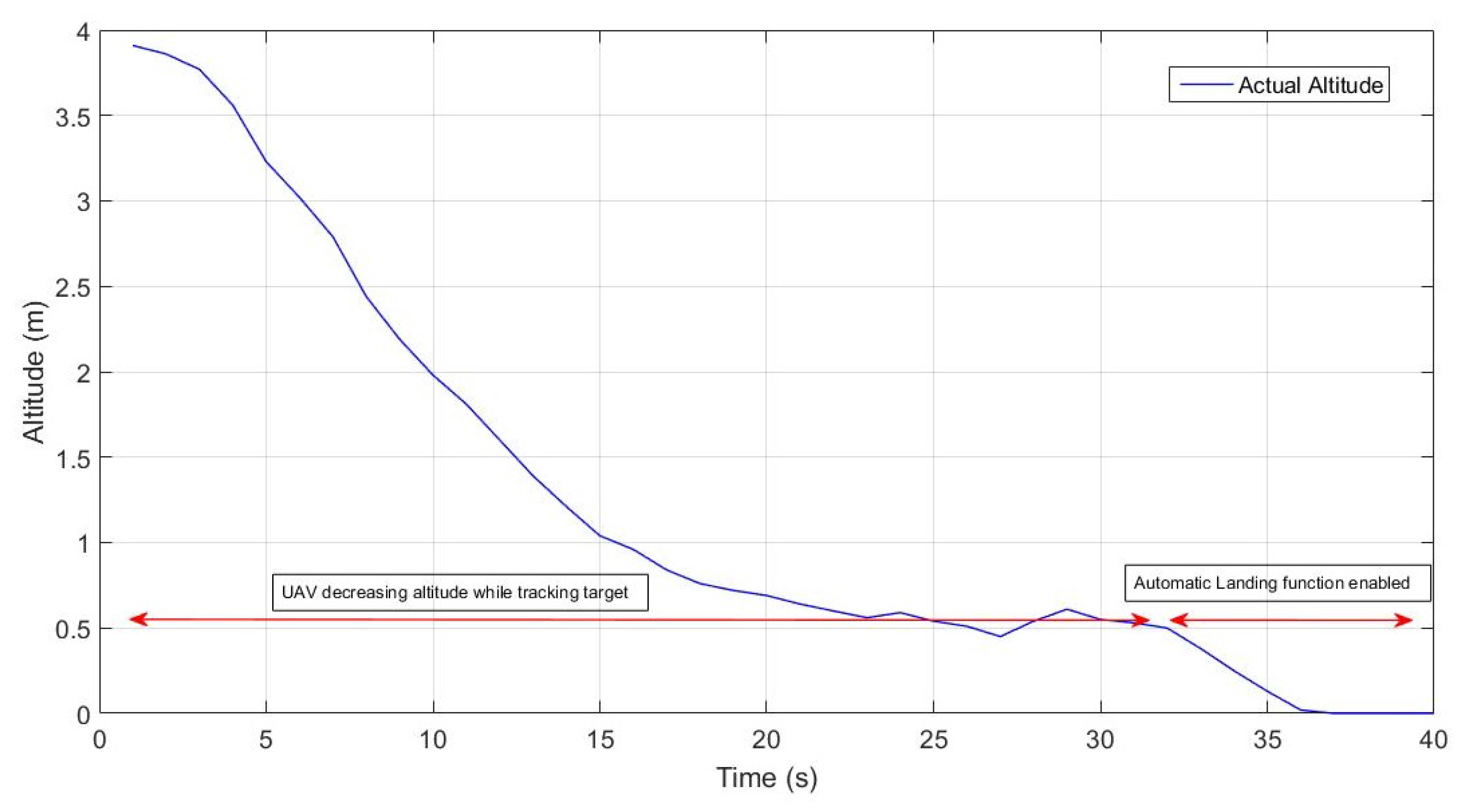
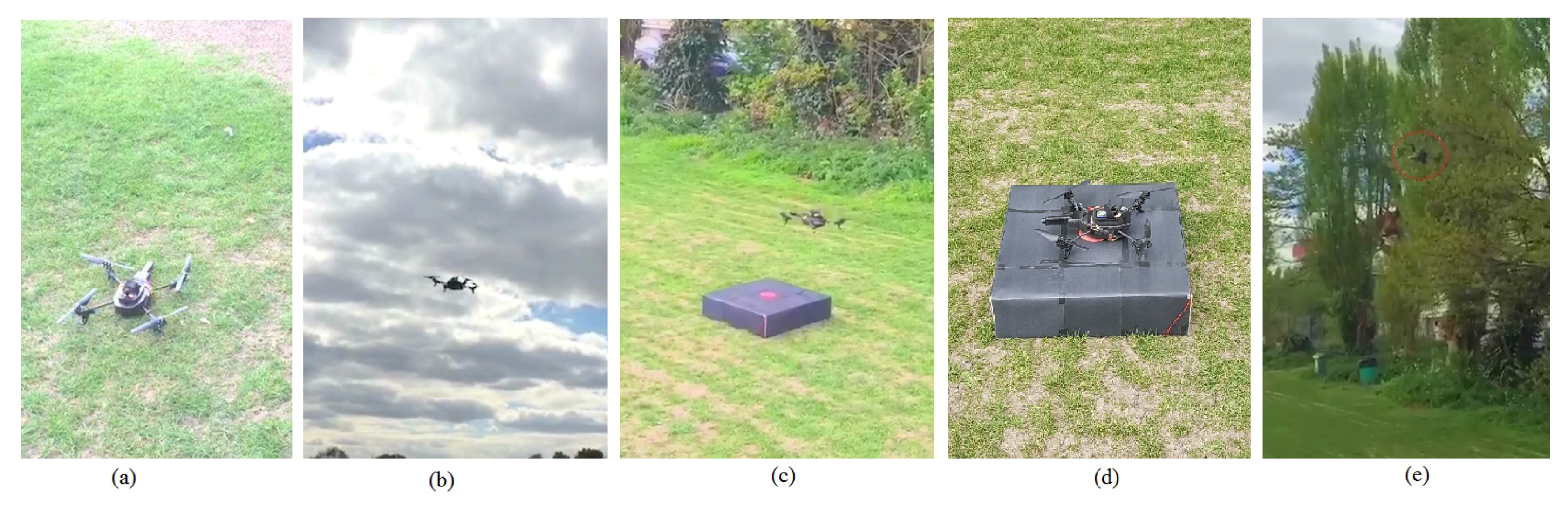
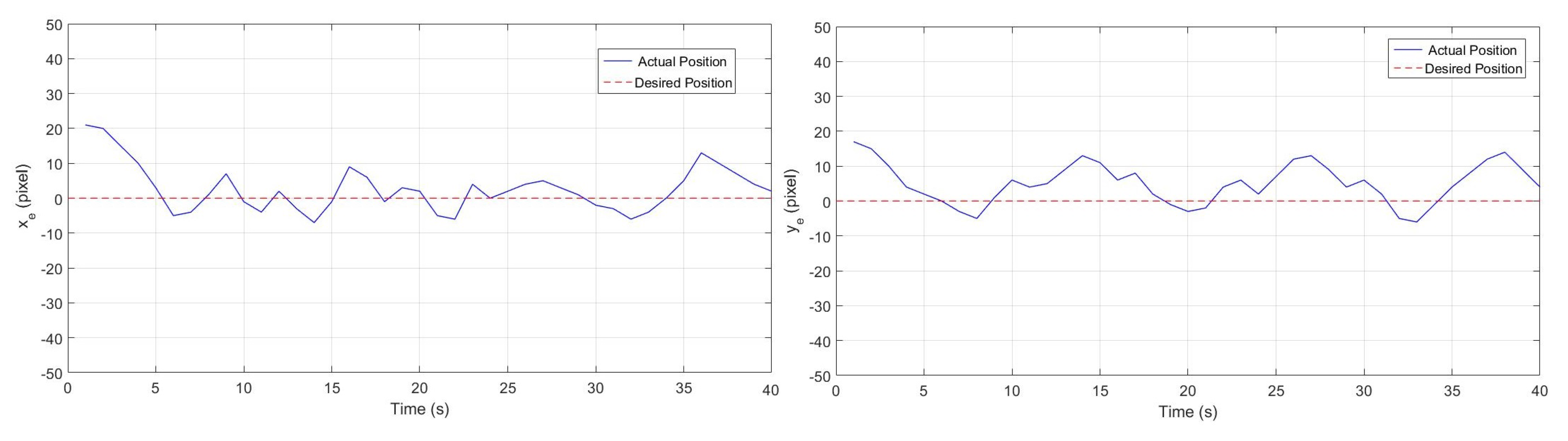
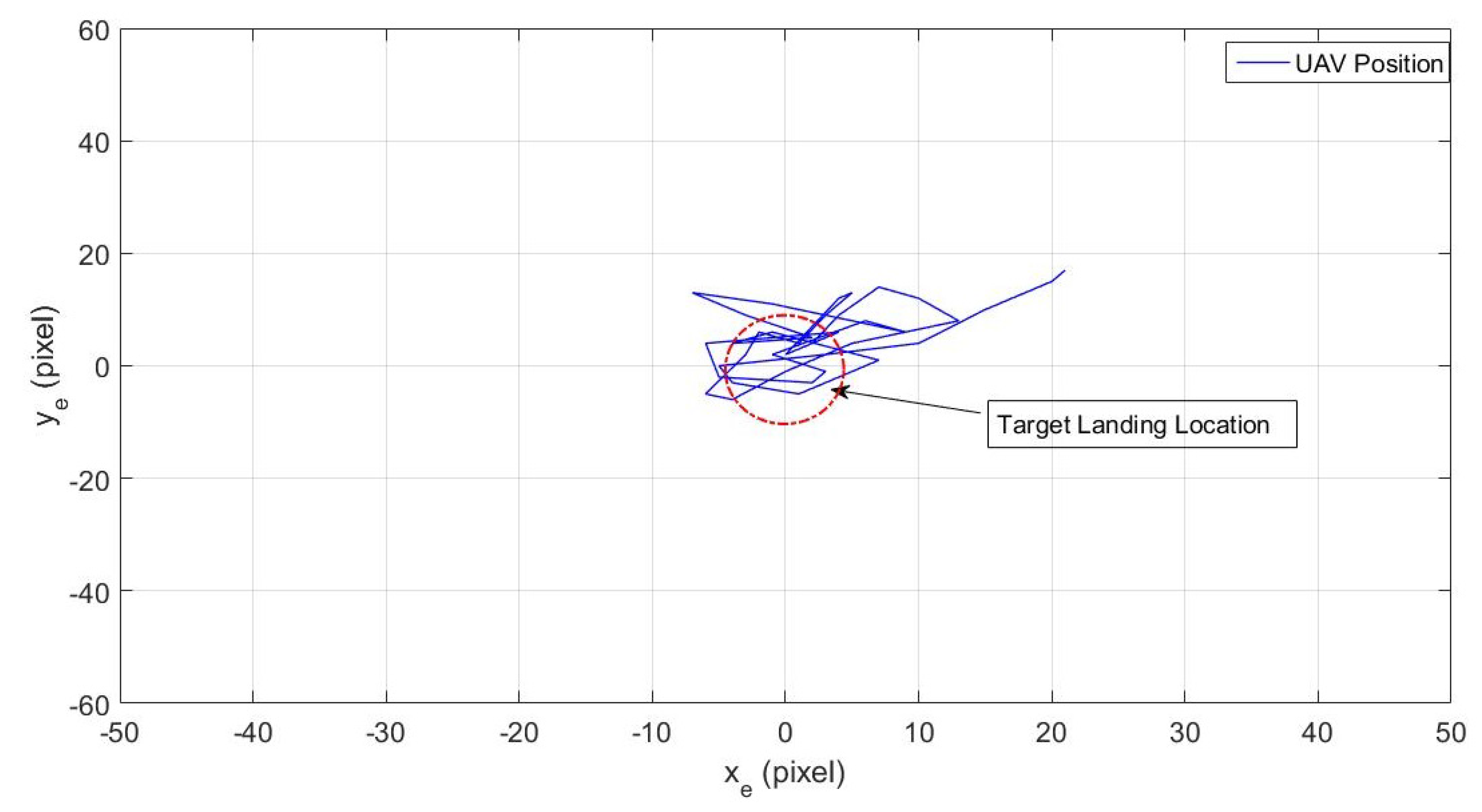
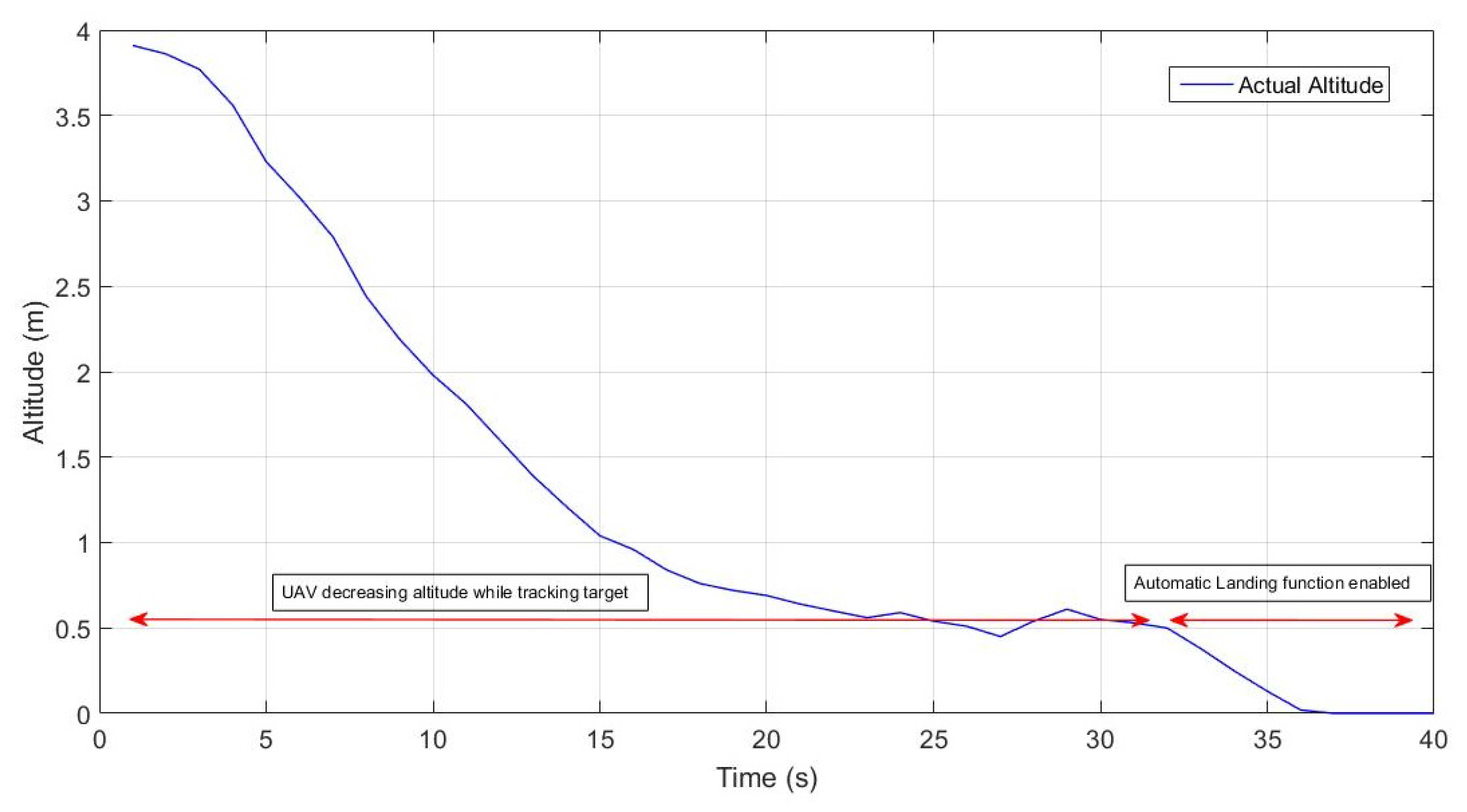
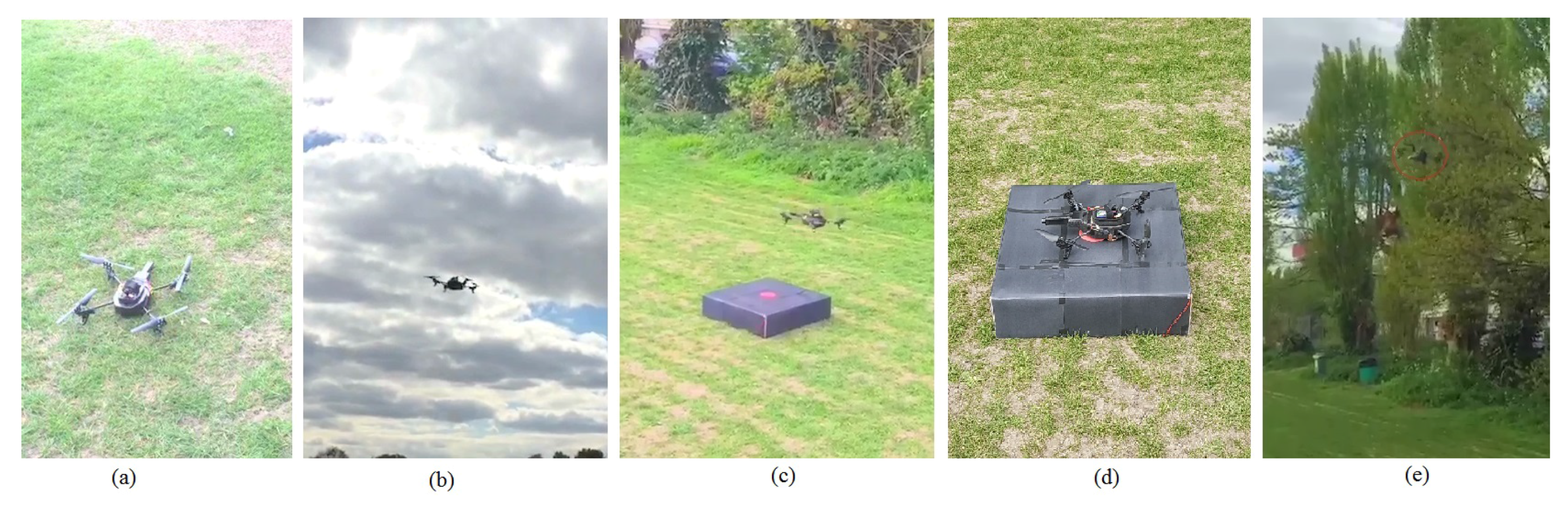
4.1. Target Tracking and Landing
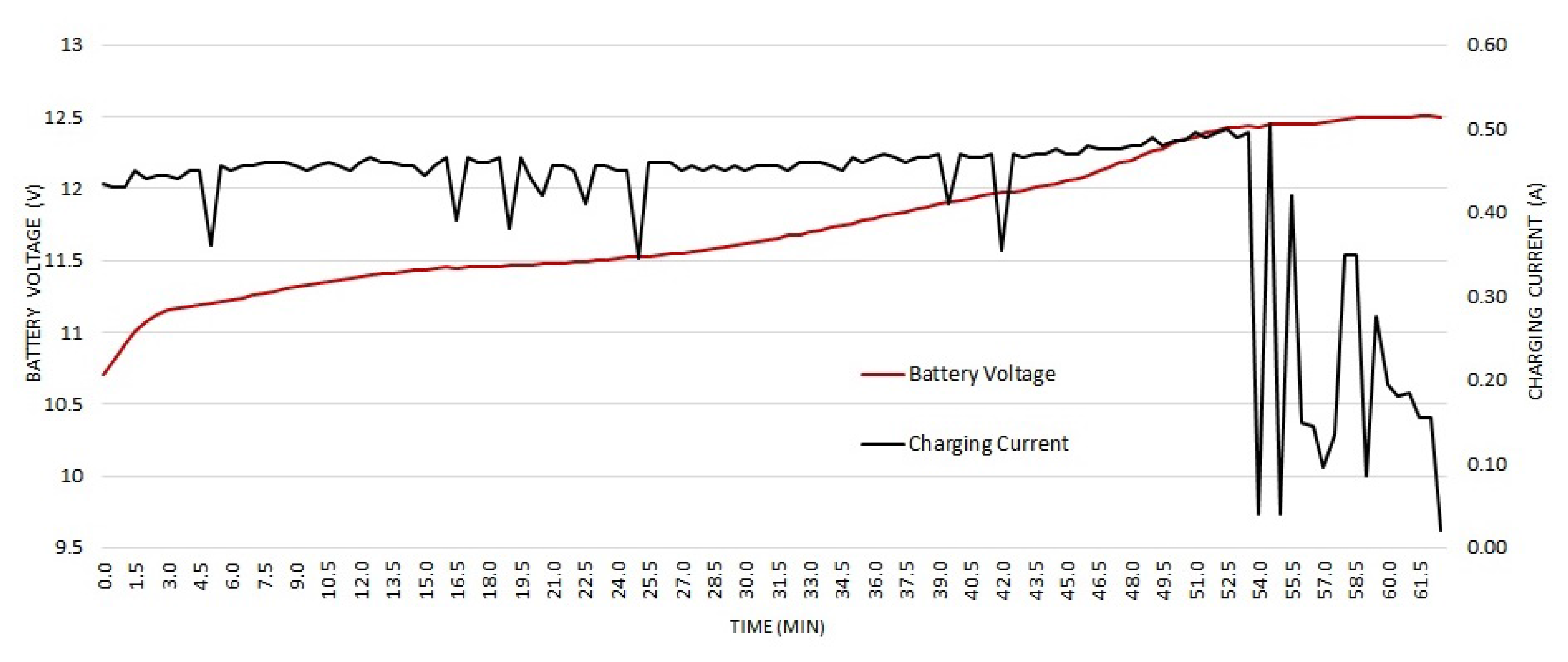
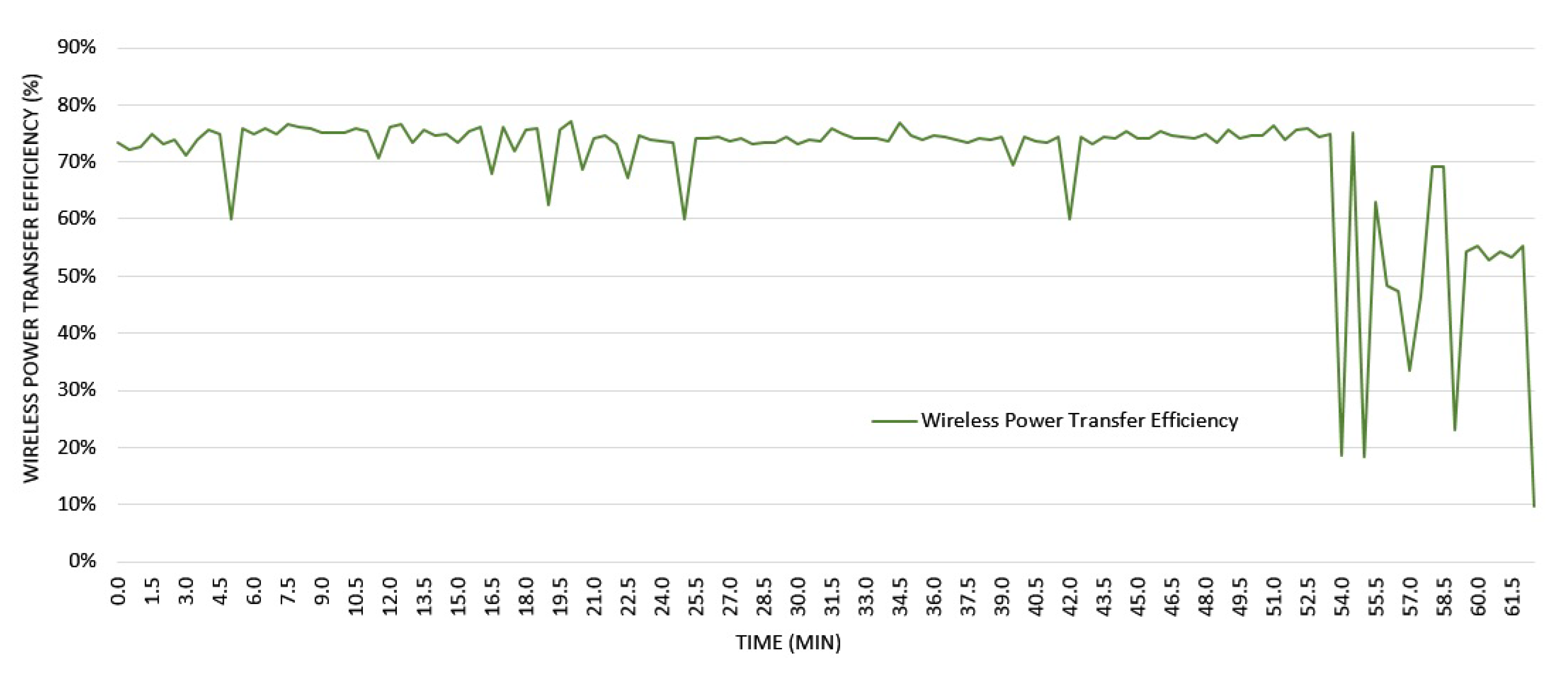
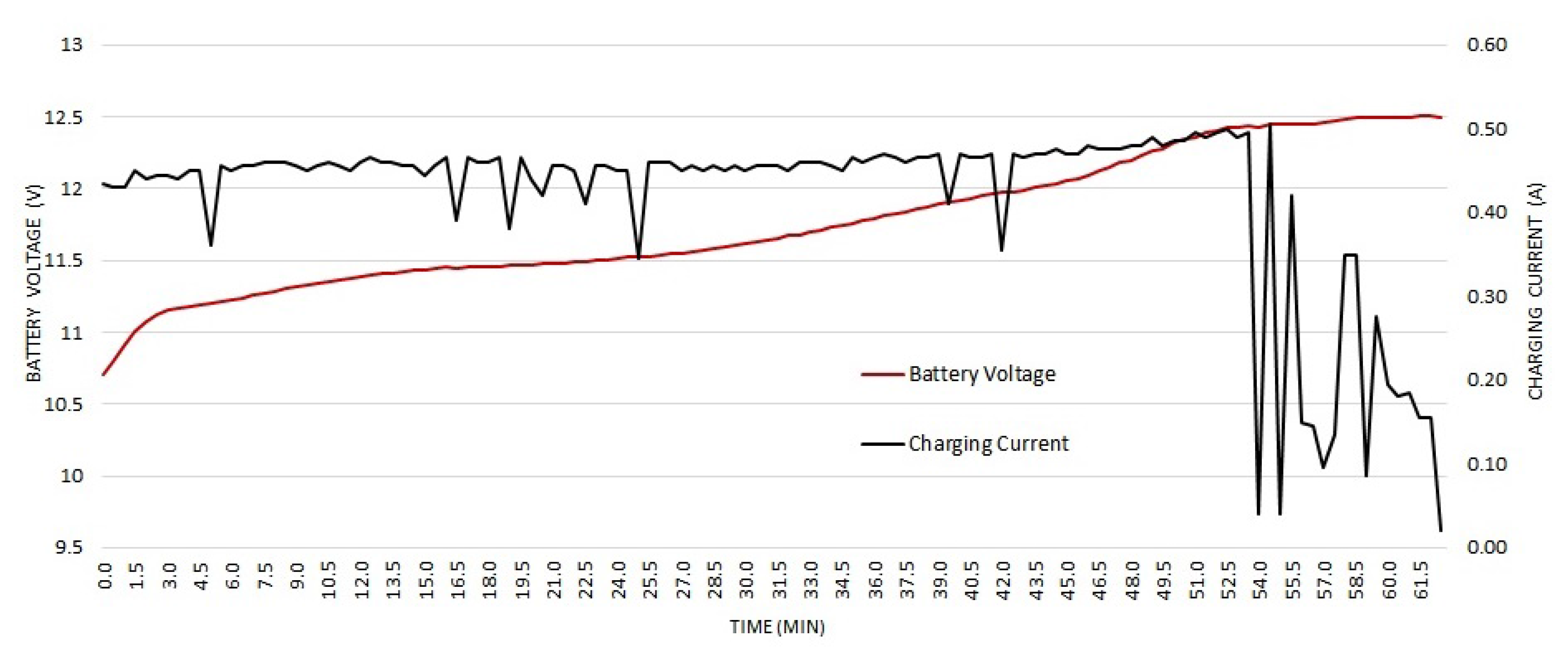
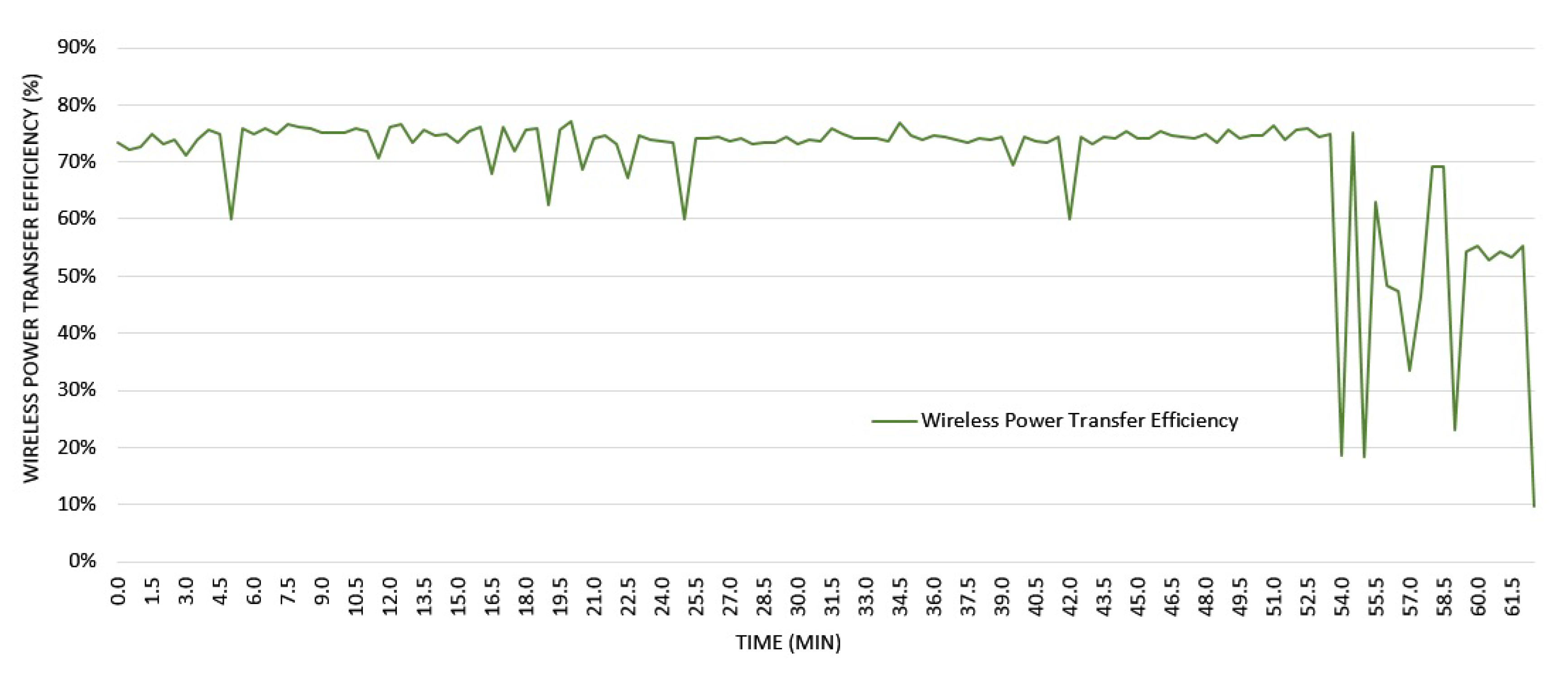
4.2. Wireless Power Transfer Analysis
4.3. Persistent Mission with Prolonged Flight
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| LiPo | Lithium Polymer |
| PD | Proportional-Derivative |
| ROS | Robot Operating System |
| UAV | Unmanned Aerial Vehicle |
| VTOL | Vertical Take-Off and Landing |
| WPT | Wireless Power Transfer |
References
- Mahony, R.; Kumar, V. Aerial robotics and the quadrotor [from the guest editors]. IEEE Robot. Autom. Mag. 2012, 19, 19. [Google Scholar] [CrossRef]
- Lima, P.; Ribeiro, M.I. Santos-victor the rescue project-cooperative navigation for rescue robots. In Proceedings of the 1st International Workshop on Advances in Service Robotics, Verona, Italy, 13–15 March 2003. [Google Scholar]
- Junaid, A.B.; Lee, Y.; Kim, Y. Design and implementation of autonomous wireless charging station for rotary-wing UAVs. Aerosp. Sci. Technol. 2016, 54, 253–266. [Google Scholar] [CrossRef]
- Dale, D.R. Automated Ground Maintenence and Health Management for Autonomous Unmanned Aerial Vehicles. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2007. [Google Scholar]
- Valenti, M.; Dale, D.; How, J.; Pucci de Farias, D.; Vian, J. Mission health management for 24/7 persistent surveillance operations. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar]
- Silverman, M.C.; Jung, B.; Nies, D.; Sukhatme, G.S. Staying Alive Longer: Autonomous Robot Recharging Put to the Test; Center for Robotics and Embedded Systems (CRES) Technical Report; University of Southern California: Los Angeles, CA, USA, 2003. [Google Scholar]
- Swieringa, K.A.; Hanson, C.B.; Richardson, J.R.; White, J.D.; Hasan, Z.; Qian, E.; Girard, A. Autonomous battery swapping system for small-scale helicopters. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 3335–3340. [Google Scholar]
- iRobot Corporation. Available online: http://www.irobot.com/ (accessed on April 2015).
- Augugliaro, F.; Lupashin, S.; Hamer, M.; Male, C.; Hehn, M.; Mueller, M.W.; Willmann, J.S.; Gramazio, F.; Kohler, M.; D’Andrea, R. The flight assembled architecture installation: Cooperative construction with flying machines. IEEE Control Syst. 2014, 34, 46–64. [Google Scholar] [CrossRef]
- Vicon Motion Systems Ltd. Available online: http://www.vicon.com/ (accessed on April 2016).
- Leonard, J.; Savvaris, A.; Tsourdos, A. Energy management in swarm of Unmanned Aerial Vehicles. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 124–133. [Google Scholar]
- Voos, H.; Bou-Ammar, H. Nonlinear tracking and landing controller for quadrotor aerial robots. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 2136–2141. [Google Scholar]
- Lee, D.; Ryan, T.; Kim, H.J. Autonomous landing of a VTOL UAV on a moving platform using image-based visual servoing. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 971–976. [Google Scholar]
- Wenzel, K.E.; Masselli, A.; Zell, A. Automatic take off, tracking and landing of a miniature UAV on a moving carrier vehicle. J. Intell. Robot. Syst. 2011, 61, 221–238. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Karalis, A.; Joannopoulos, J.; Soljačić, M. Efficient wireless non-radiative mid-range energy transfer. Ann. Phys. 2008, 323, 34–48. [Google Scholar] [CrossRef]
- Griffin, B.; Detweiler, C. Resonant wireless power transfer to ground sensors from a UAV. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Guangzhou, China, 11–14 December 2012; pp. 2660–2665. [Google Scholar]
- Khonji, M.; Alshehhi, M.; Tseng, C.M.; Chau, C.K. Autonomous inductive charging system for battery-operated electric drones. In Proceedings of the Eighth International Conference on Future Energy Systems, Hong Kong, China, 16–19 May 2017; pp. 322–327. [Google Scholar]
- Zhao, D.; Chen, W.; Al-Maharmah, R.; Kang, S.; Lim, S.O.; Bruck, G.; Jung, P. Magnetic field forming of spatial multiple antennas for wireless power transfer. In Proceedings of the 2012 International Symposium on Antennas and Propagation (ISAP), Nagoya, Japan, 29 October–2 November 2012; pp. 1204–1207. [Google Scholar]
- Kim, J.; Shim, D.H.; Morrison, J.R. Tablet PC-based visual target-following system for quadrotors. J. Intell. Robot. Syst. 2014, 74, 85–95. [Google Scholar] [CrossRef]
- OpenCV. Available online: http://www.opencv.org/ (accessed on April 2016).
- Zhang, J.; Song, G.; Li, Y.; Qiao, G.; Li, Z. Battery swapping and wireless charging for a home robot system with remote human assistance. IEEE Trans. Consum. Electron. 2013, 59, 747–755. [Google Scholar] [CrossRef]
- Han, S.; Wentzloff, D.D. Wireless power transfer using resonant inductive coupling for 3D integrated ICs. In Proceedings of the 2010 IEEE International 3D Systems Integration Conference (3DIC), Munich, Germany, 16–18 November 2010; pp. 1–5. [Google Scholar]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Junaid, A.B.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles. Energies 2017, 10, 803. https://doi.org/10.3390/en10060803
Junaid AB, Konoiko A, Zweiri Y, Sahinkaya MN, Seneviratne L. Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles. Energies. 2017; 10(6):803. https://doi.org/10.3390/en10060803
Chicago/Turabian StyleJunaid, Ali Bin, Aleksay Konoiko, Yahya Zweiri, M. Necip Sahinkaya, and Lakmal Seneviratne. 2017. "Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles" Energies 10, no. 6: 803. https://doi.org/10.3390/en10060803
APA StyleJunaid, A. B., Konoiko, A., Zweiri, Y., Sahinkaya, M. N., & Seneviratne, L. (2017). Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles. Energies, 10(6), 803. https://doi.org/10.3390/en10060803