
A New Method to Monitor the Primary Neutral Integrity in Multi-Grounded Neutral Systems

Abstract
:1. Introduction
2. The Proposed Primary Neutral Monitoring Method
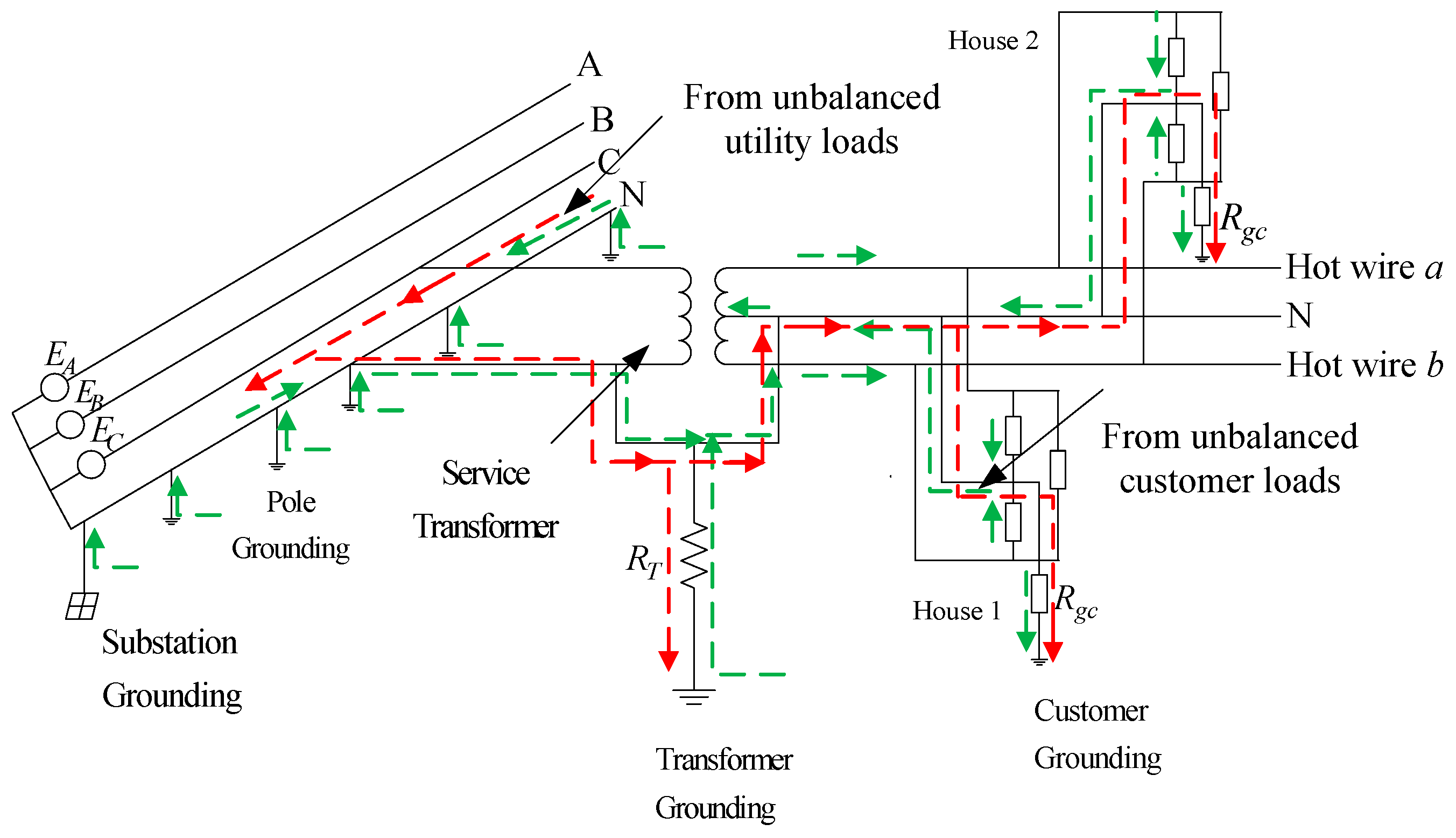
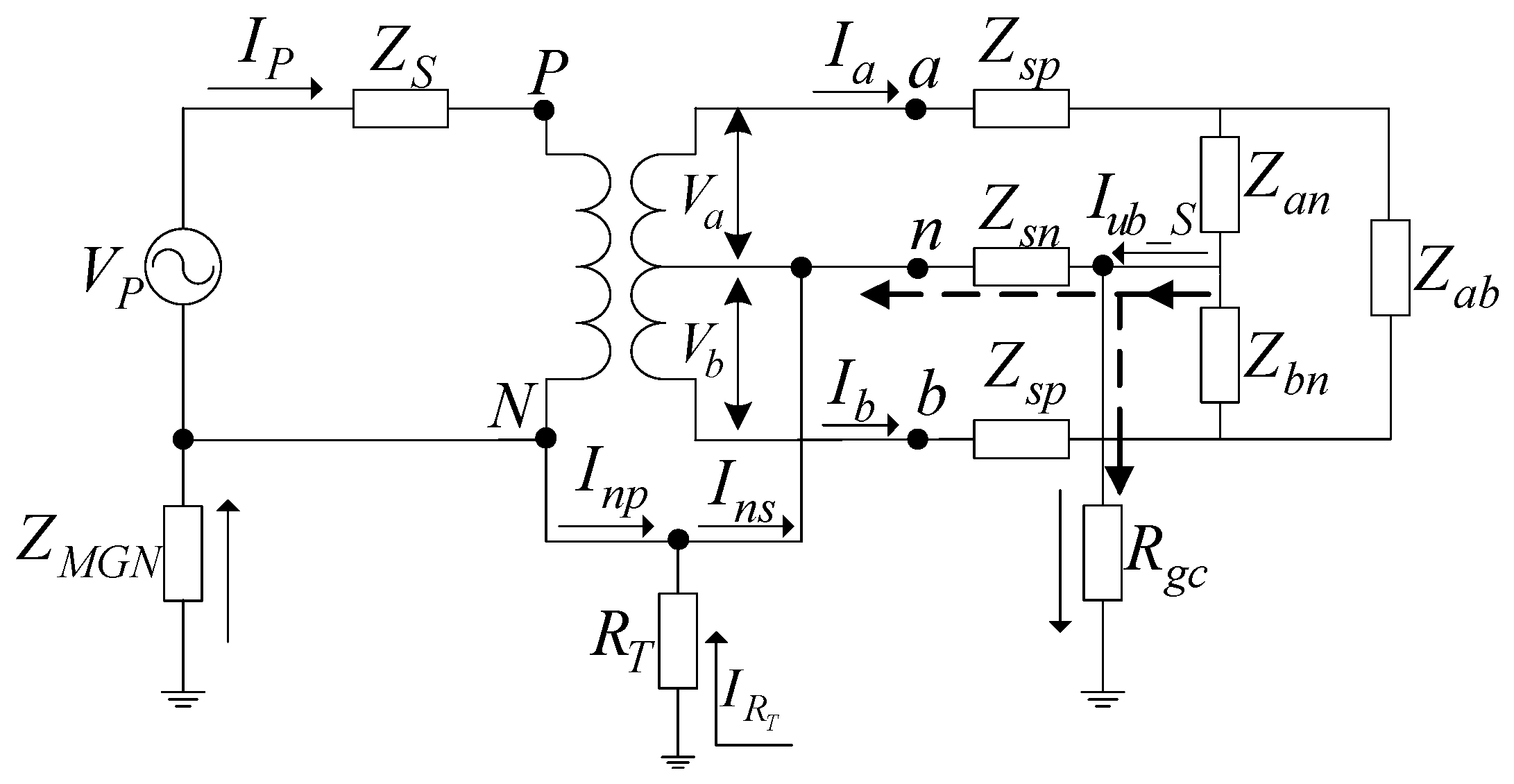
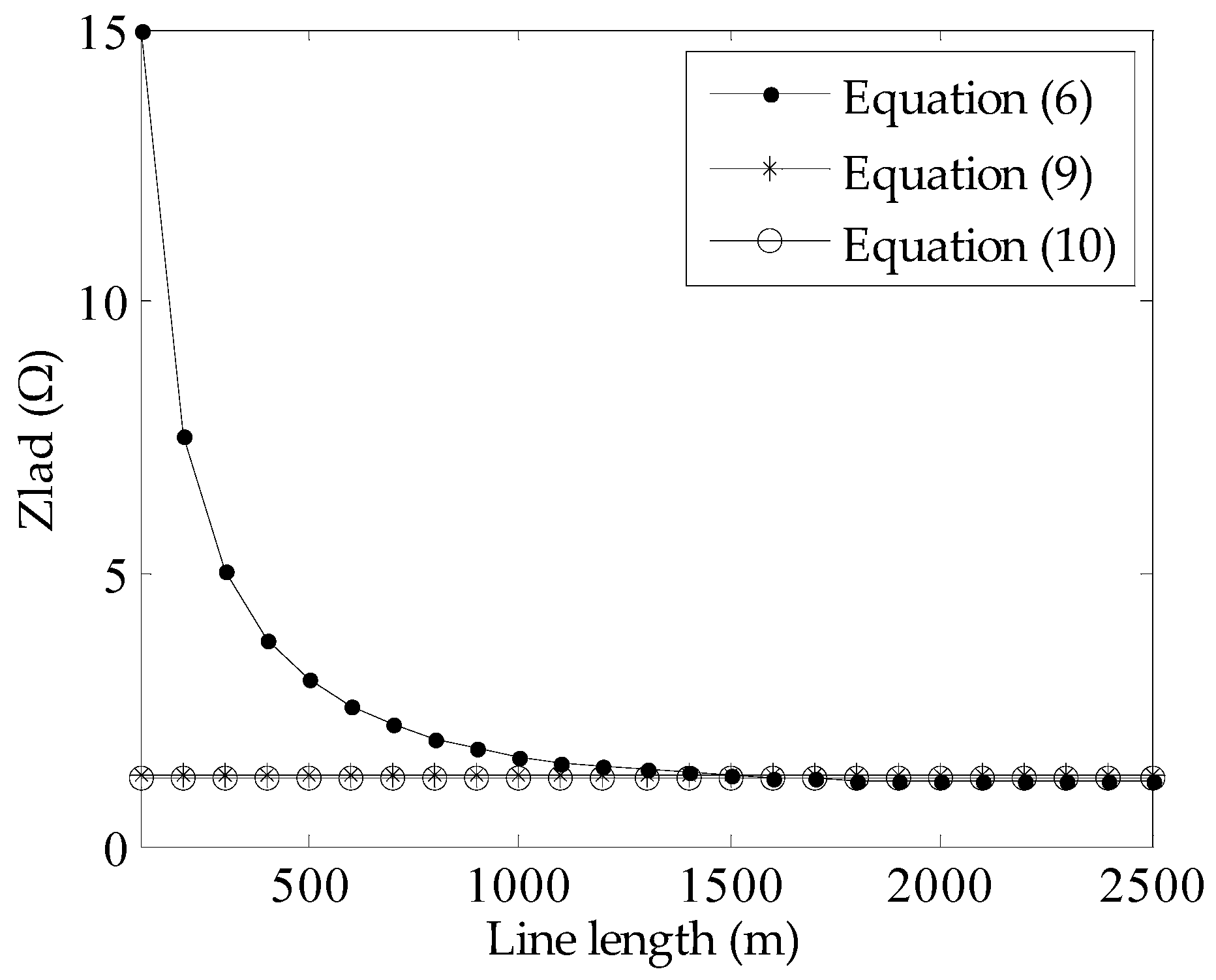
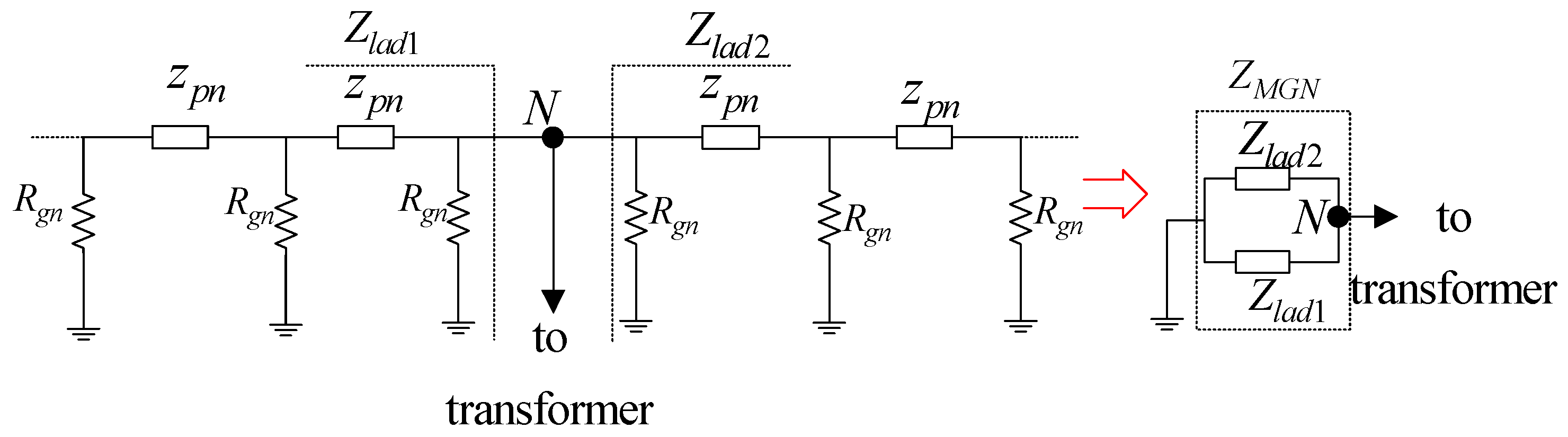
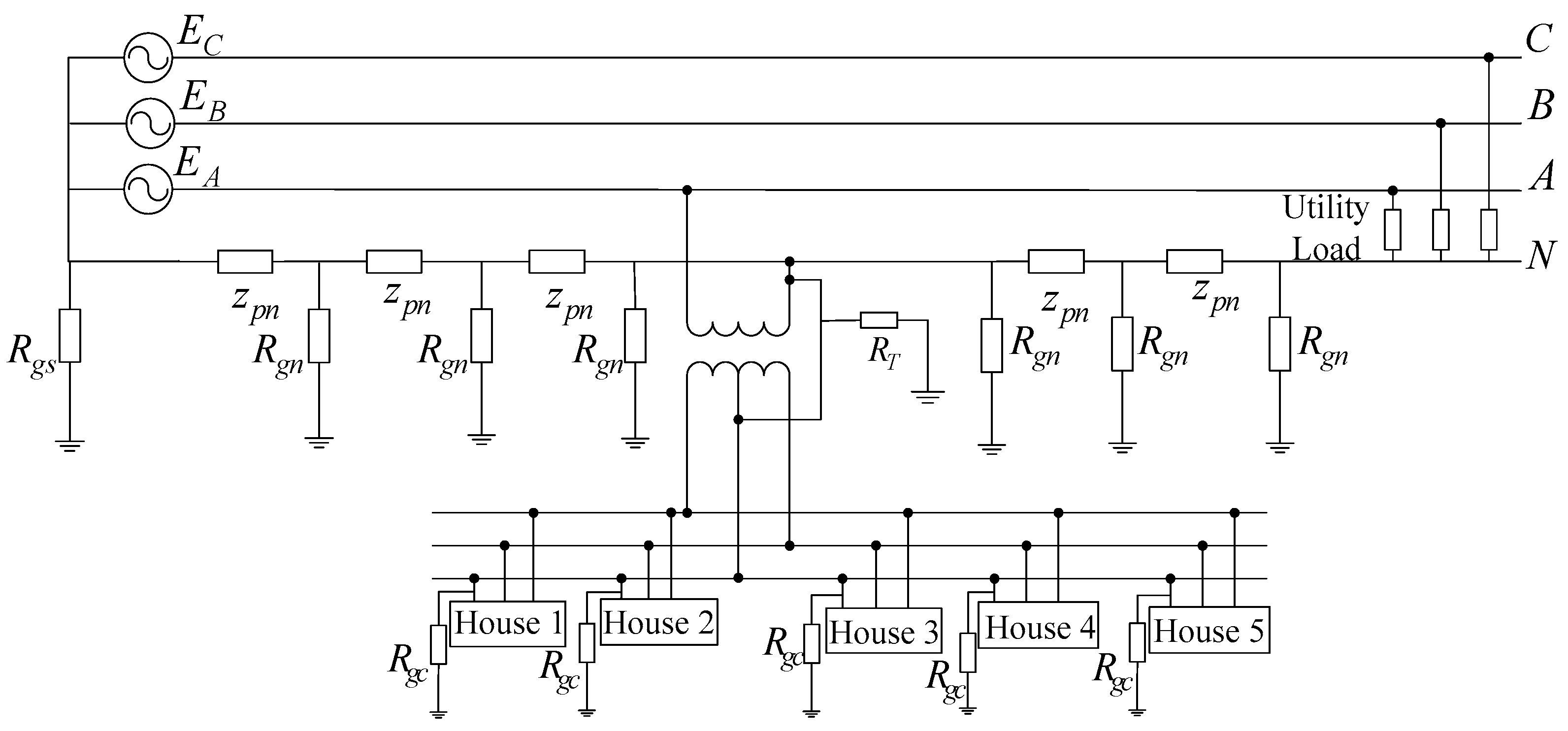
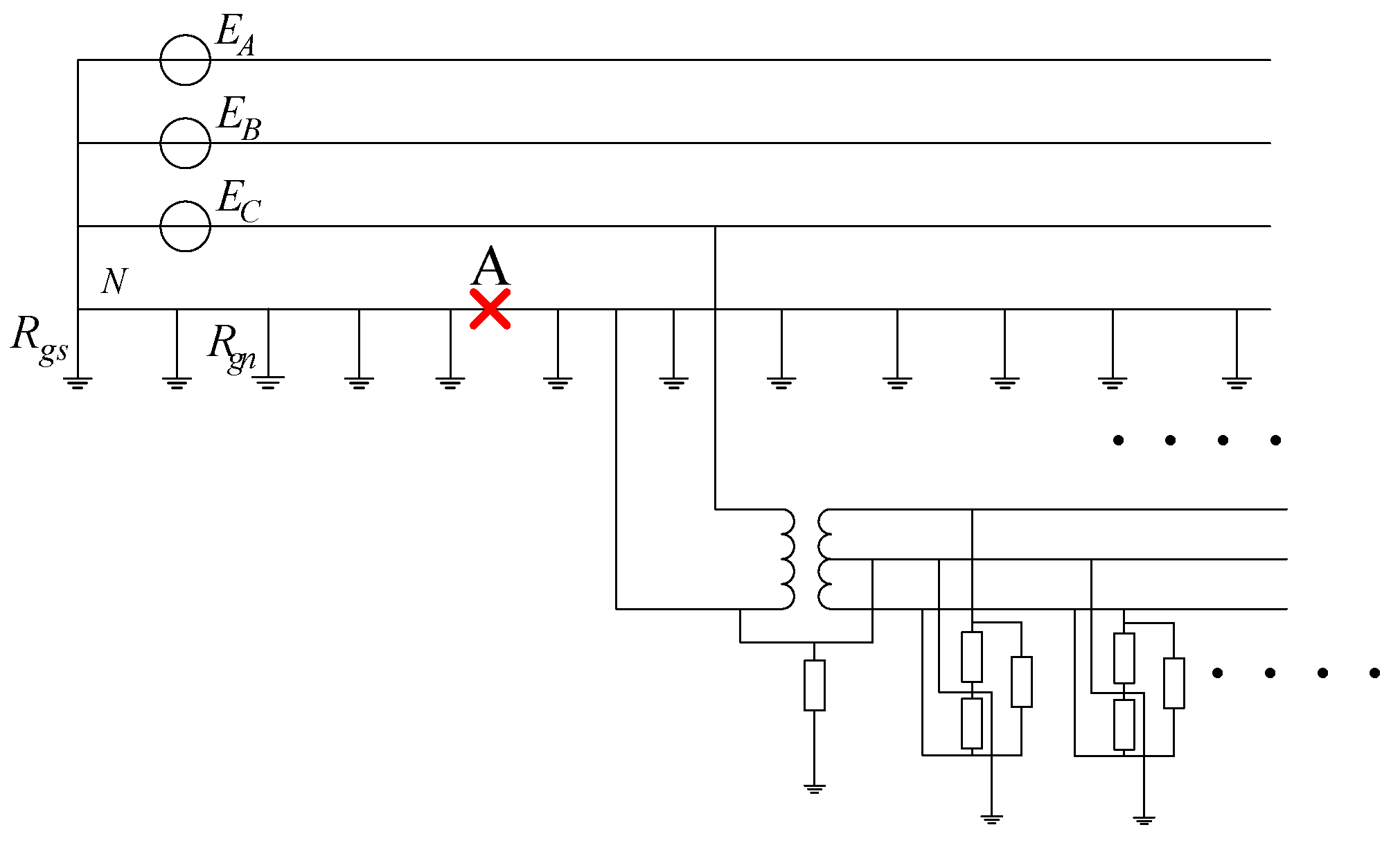
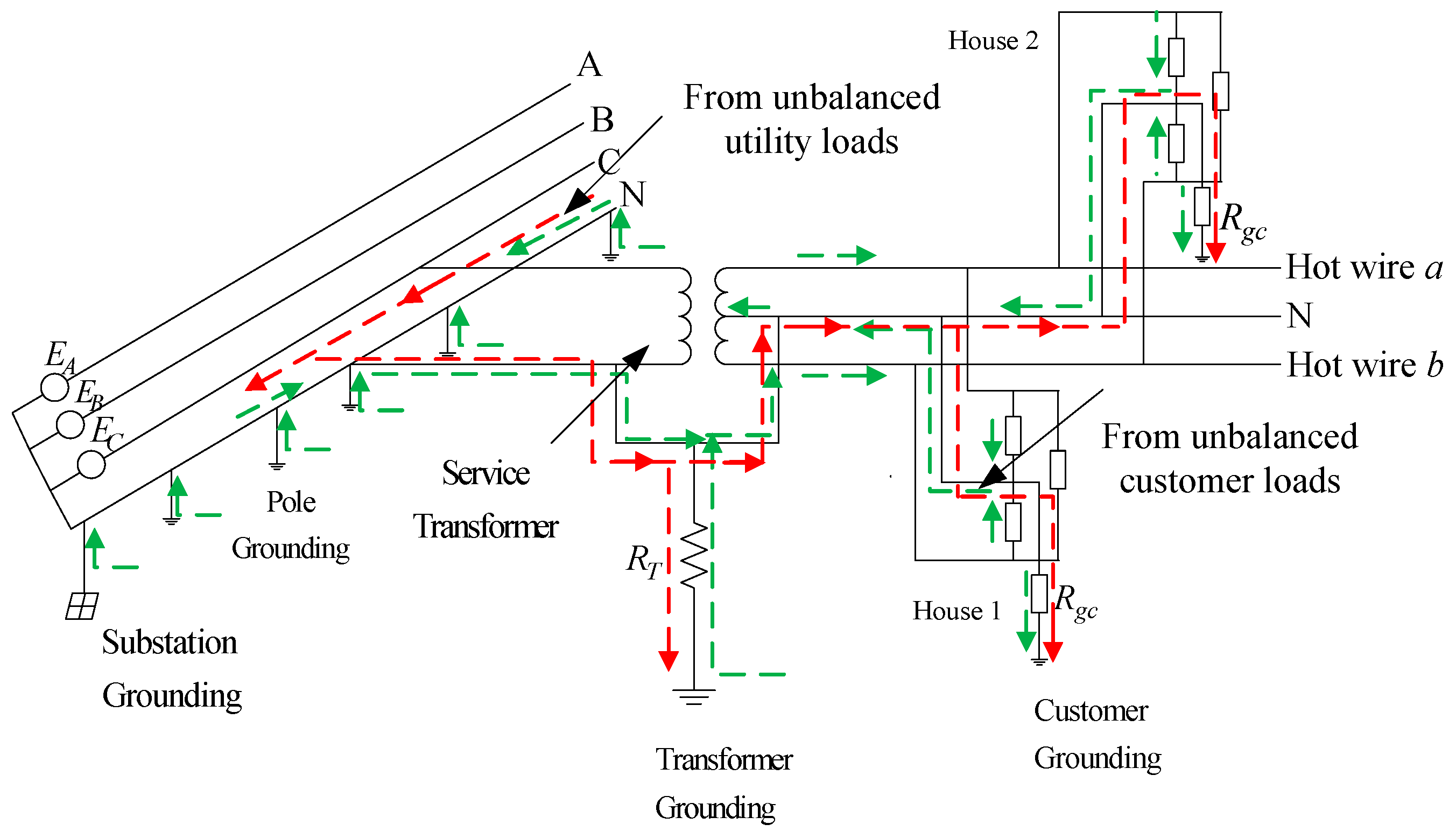
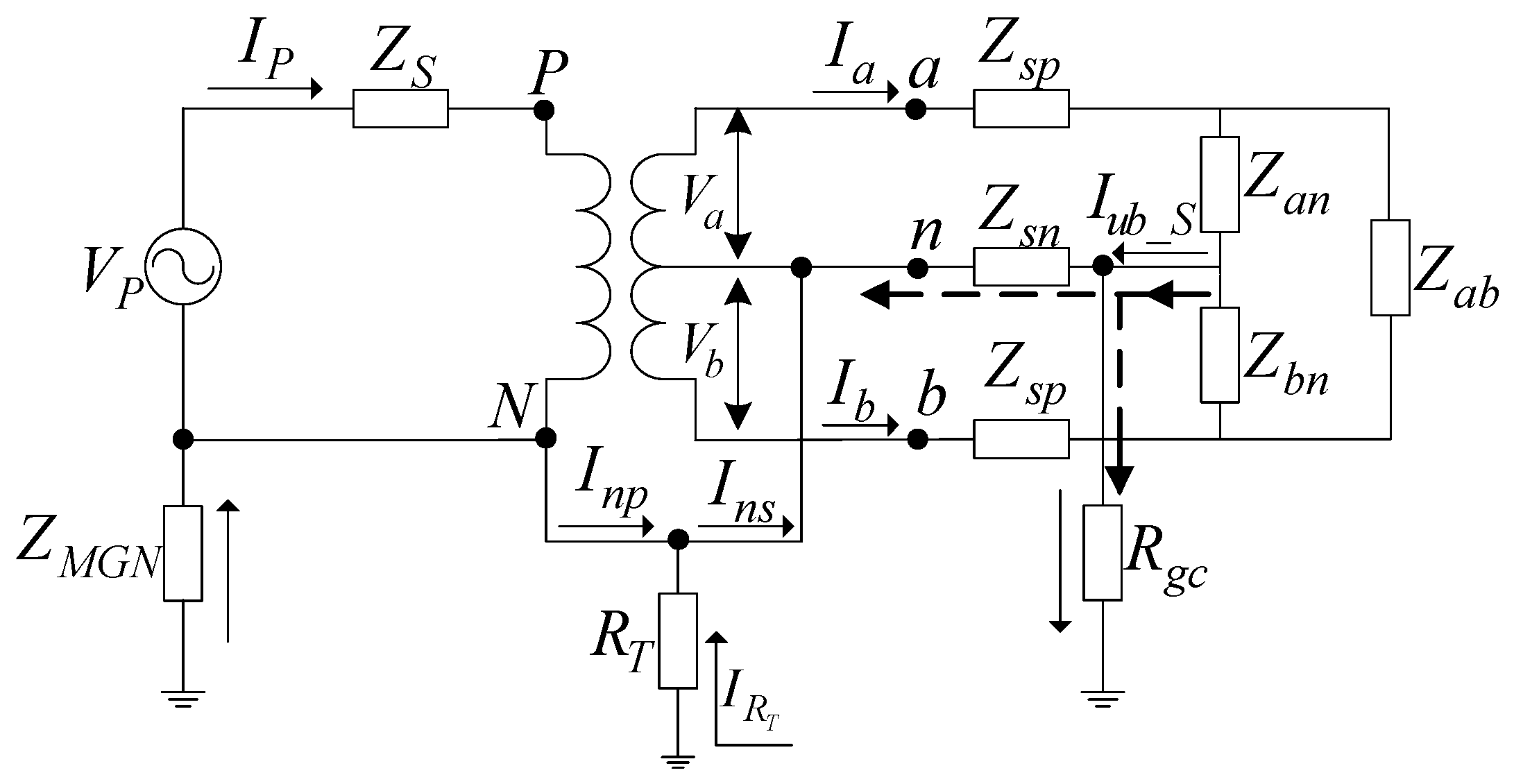
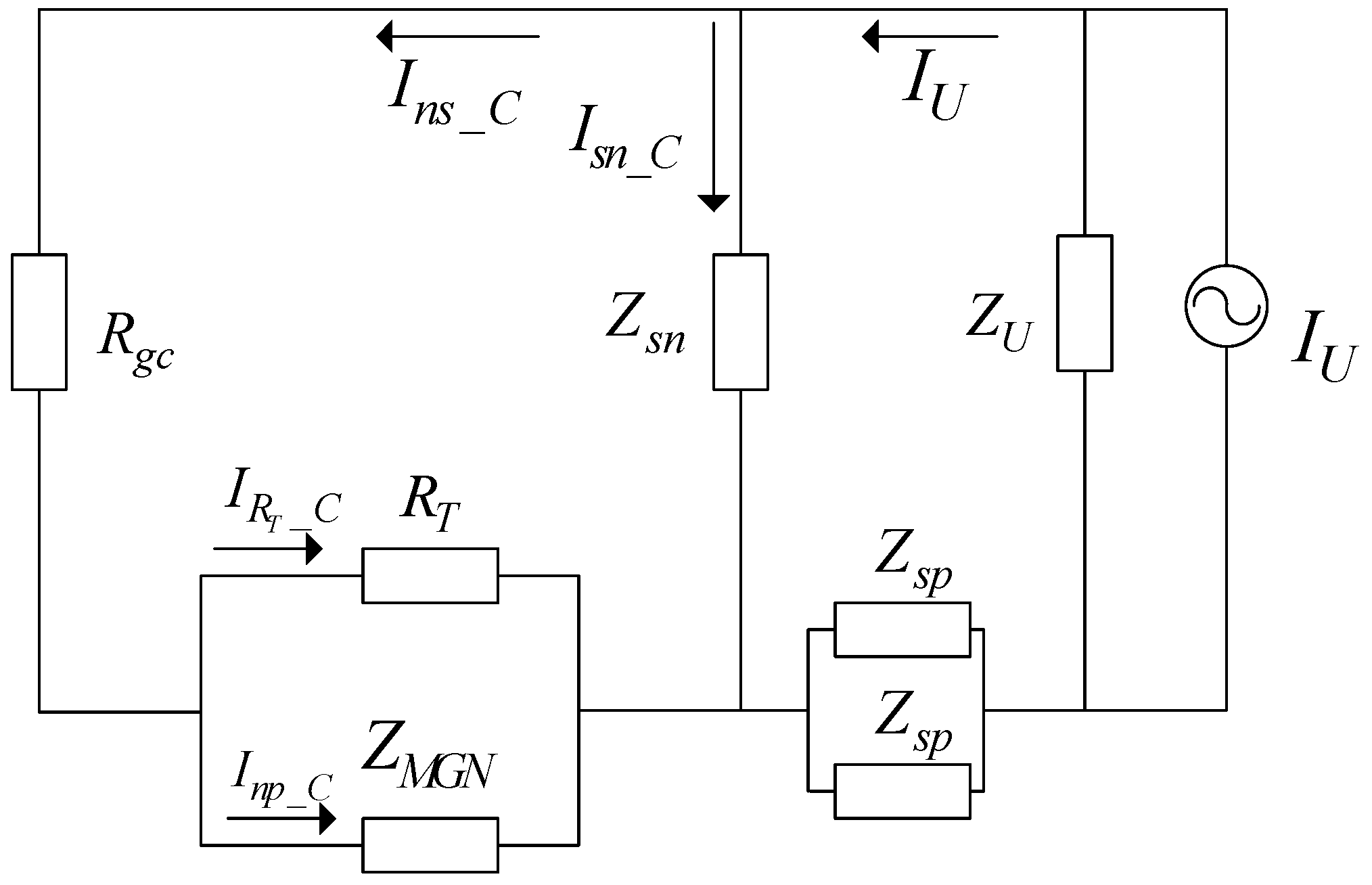
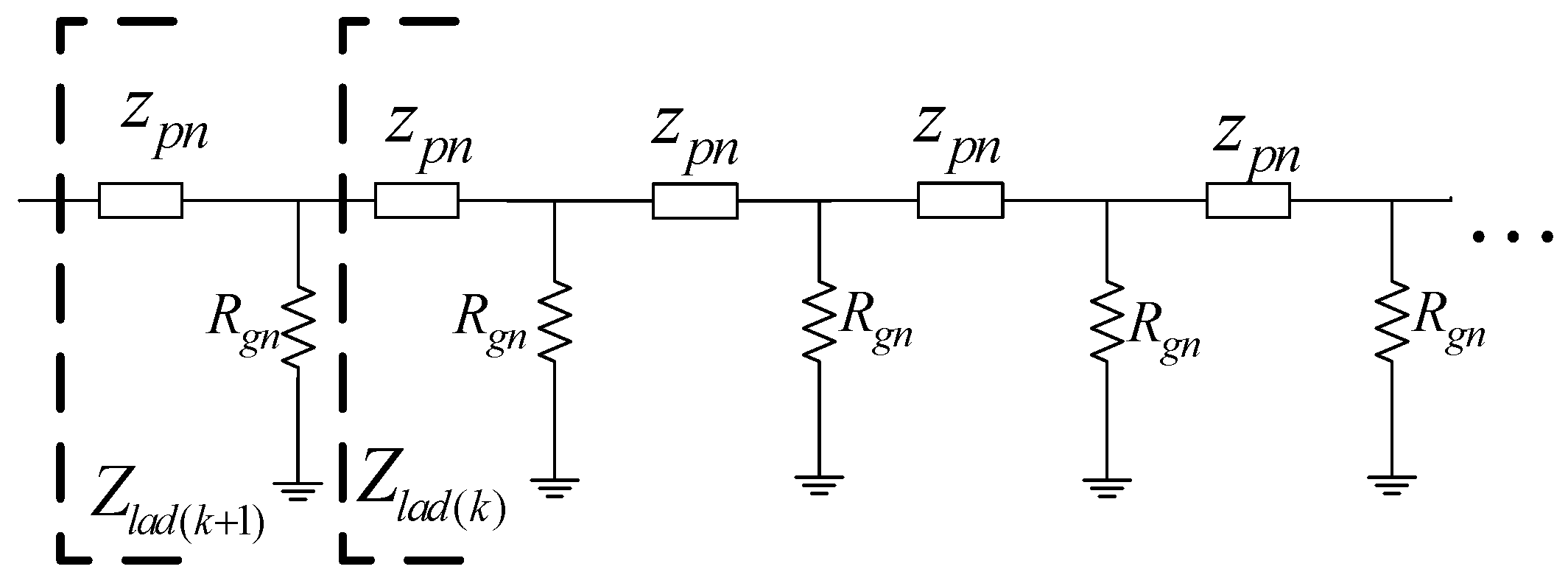
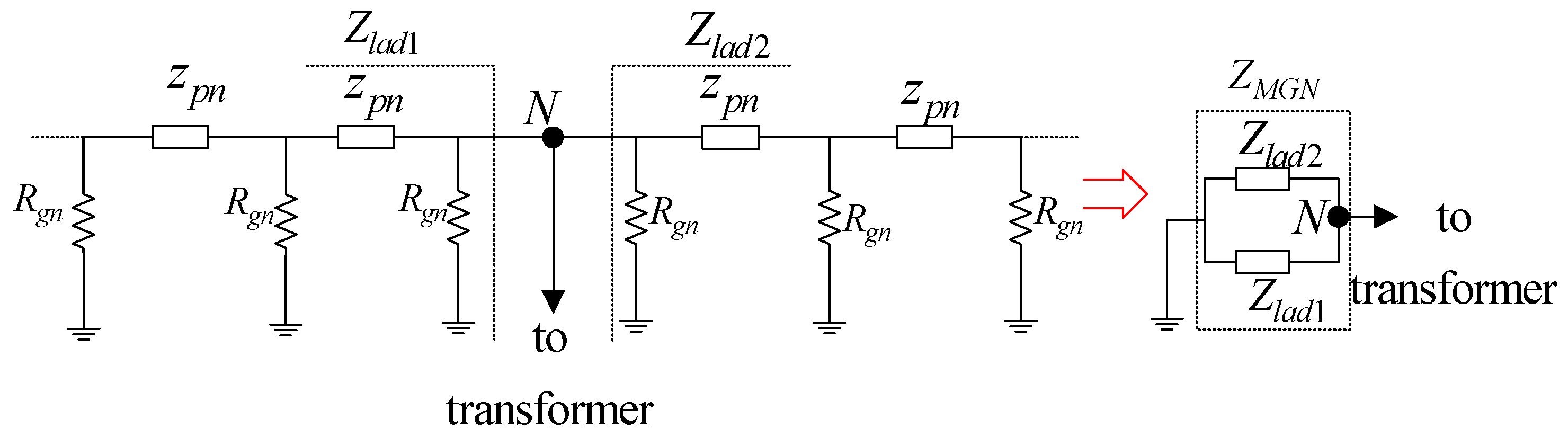
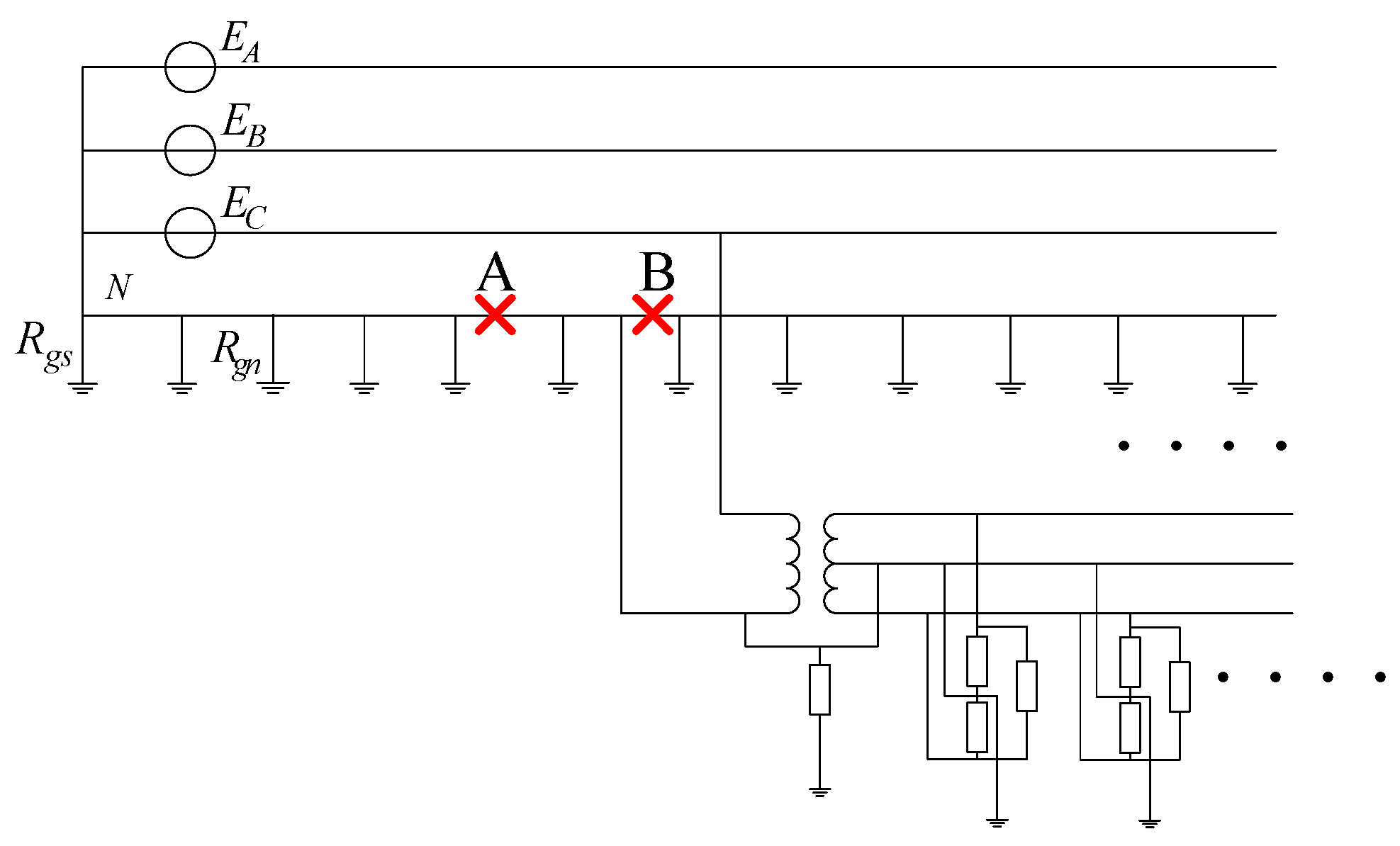
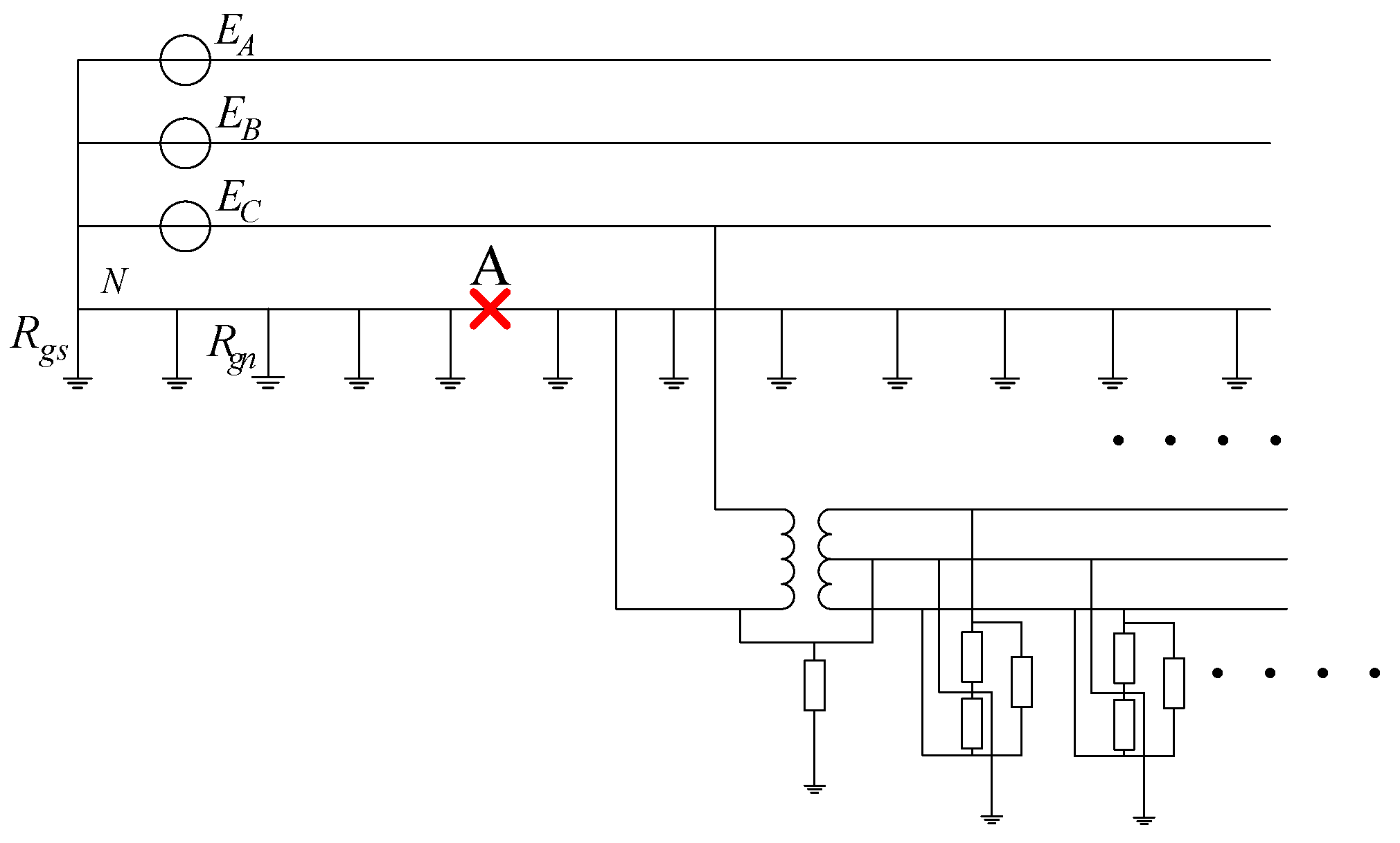
2.1. Establishment of the Equivalent Analysis Circuit
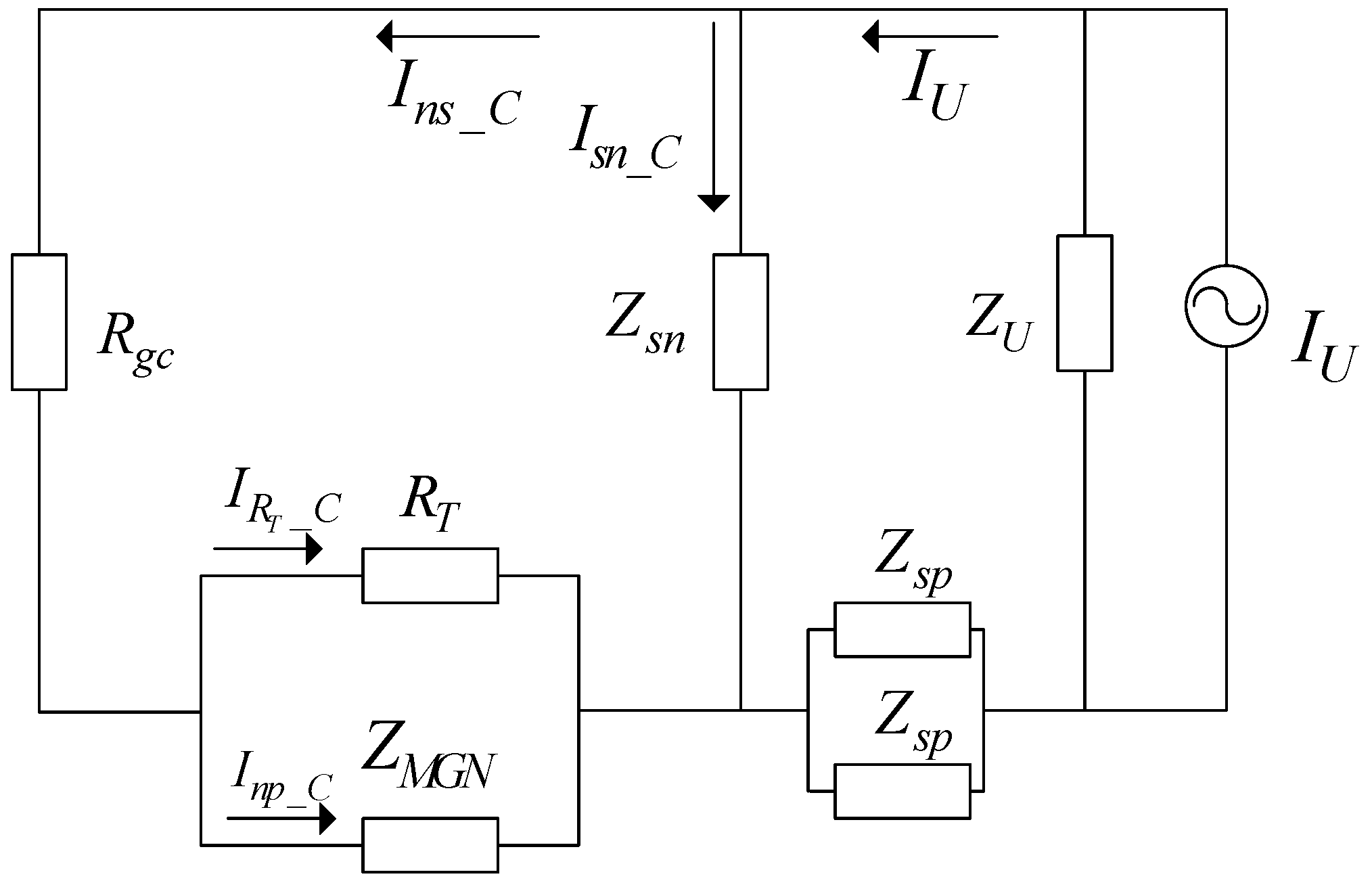
2.2. Impedance Determination under Normal Operating Conditions
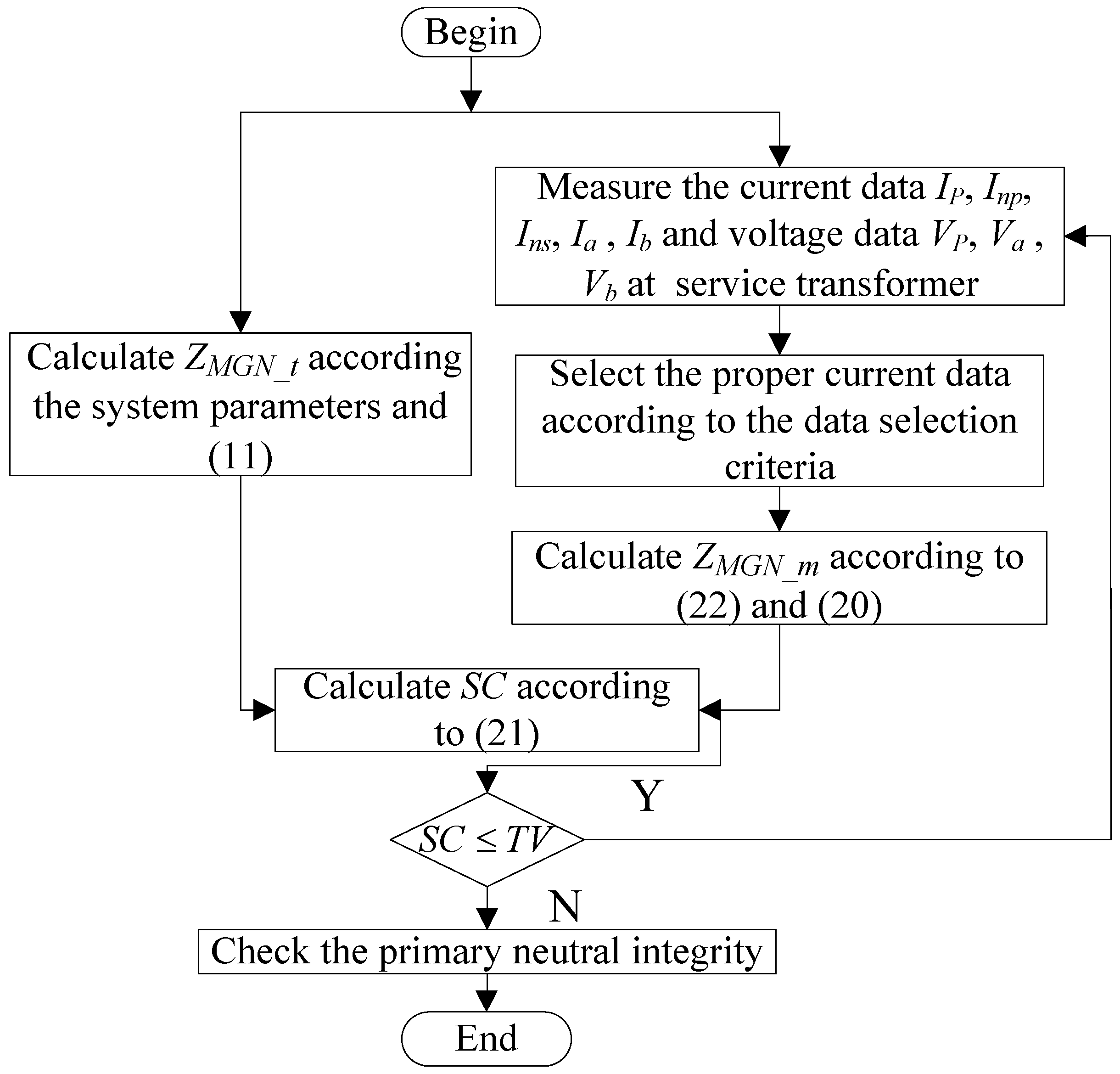
2.3. Impedance Determination Based on the Measurement Data
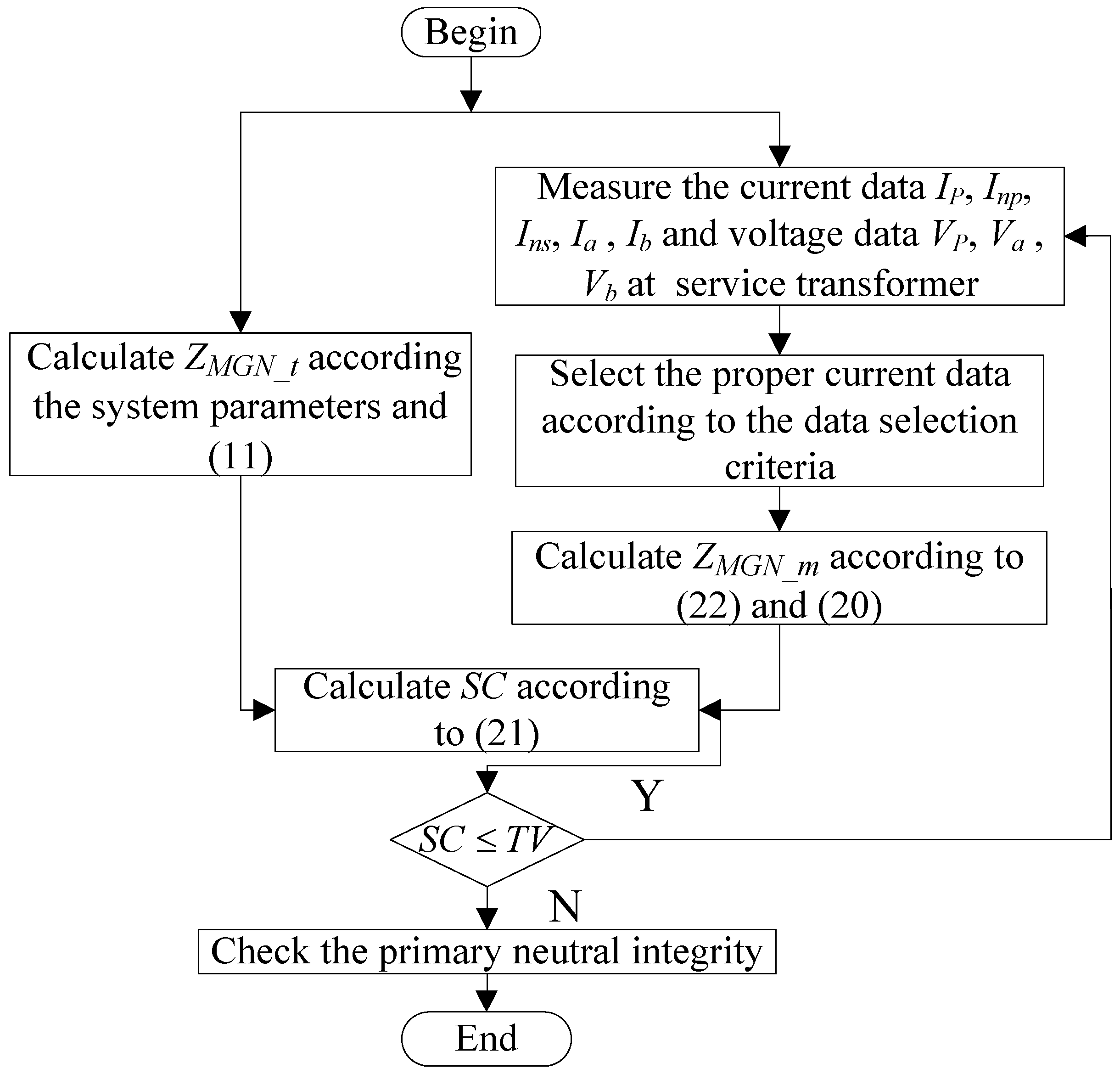
2.4. Determination of the Primary Neutral Condition
3. Data Selection Criteria
4. Simulation Verification
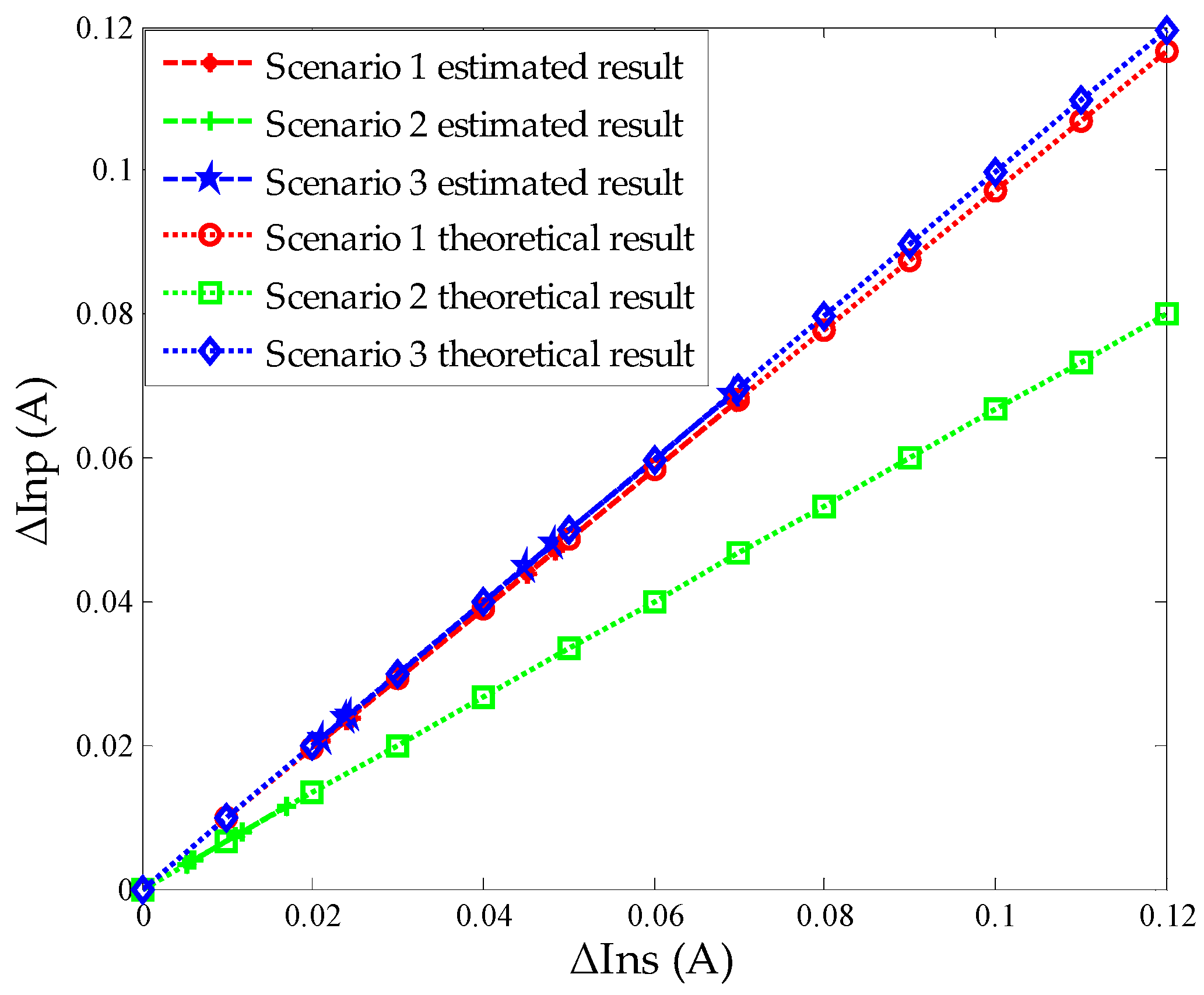
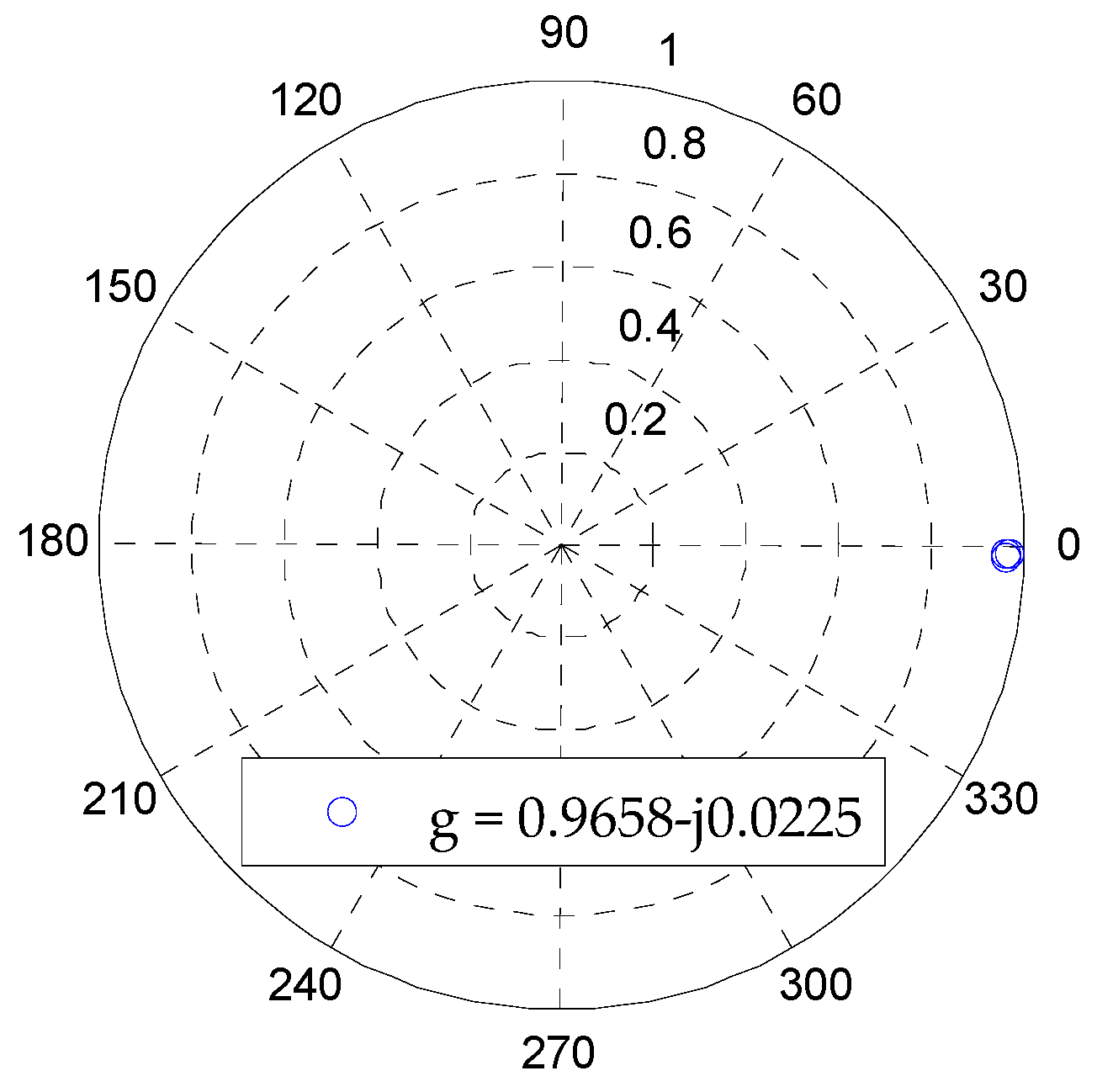
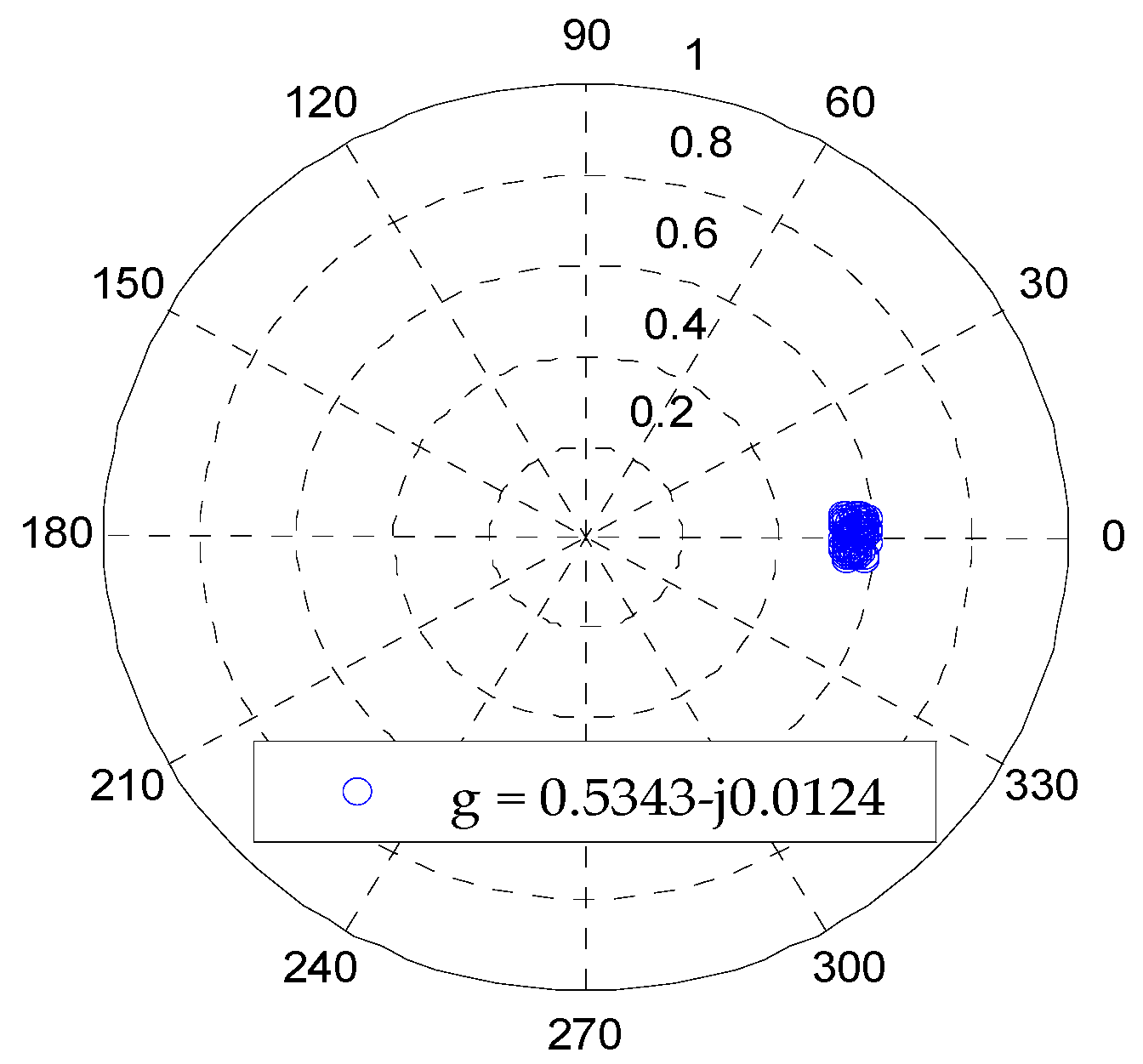
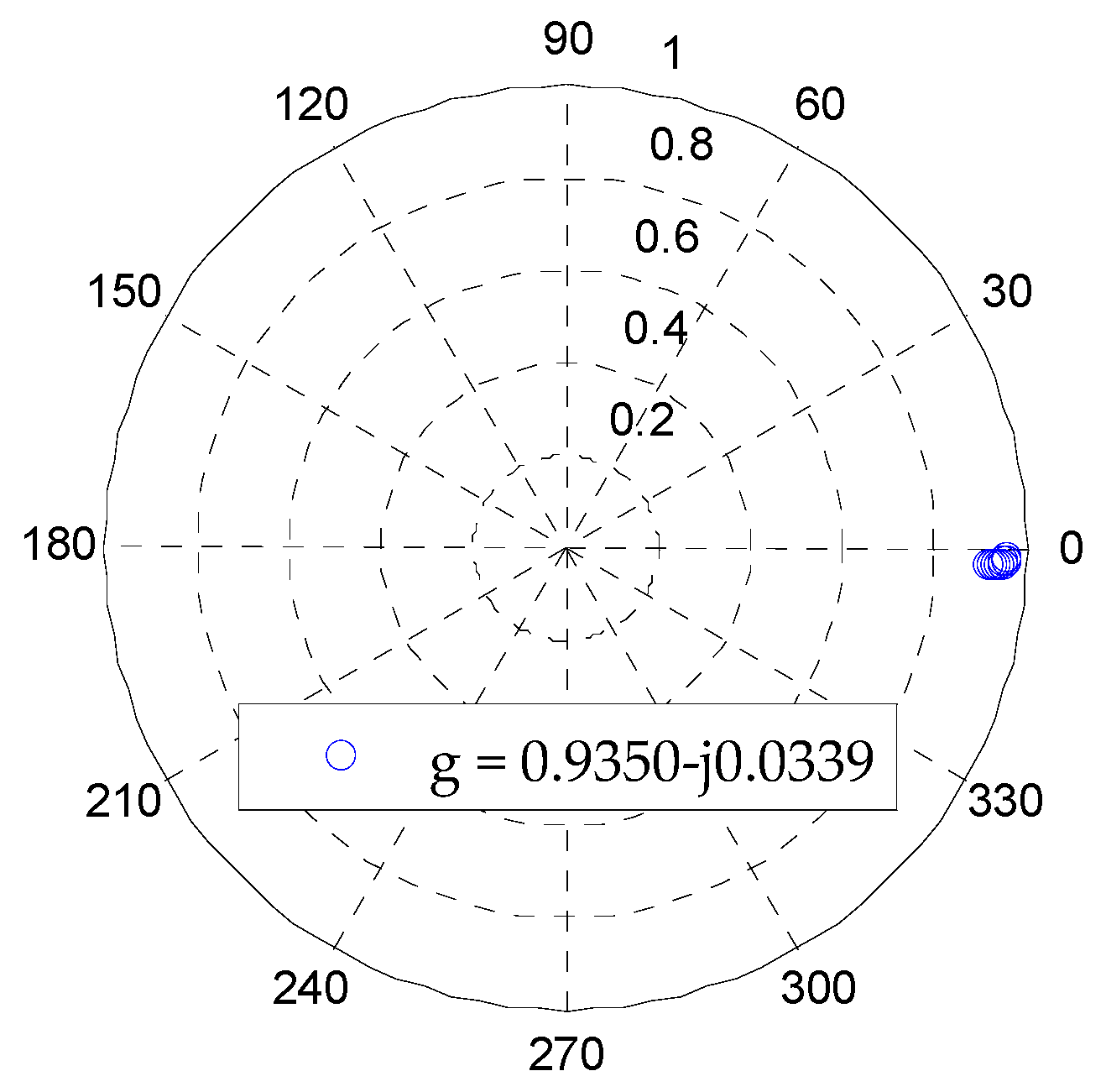
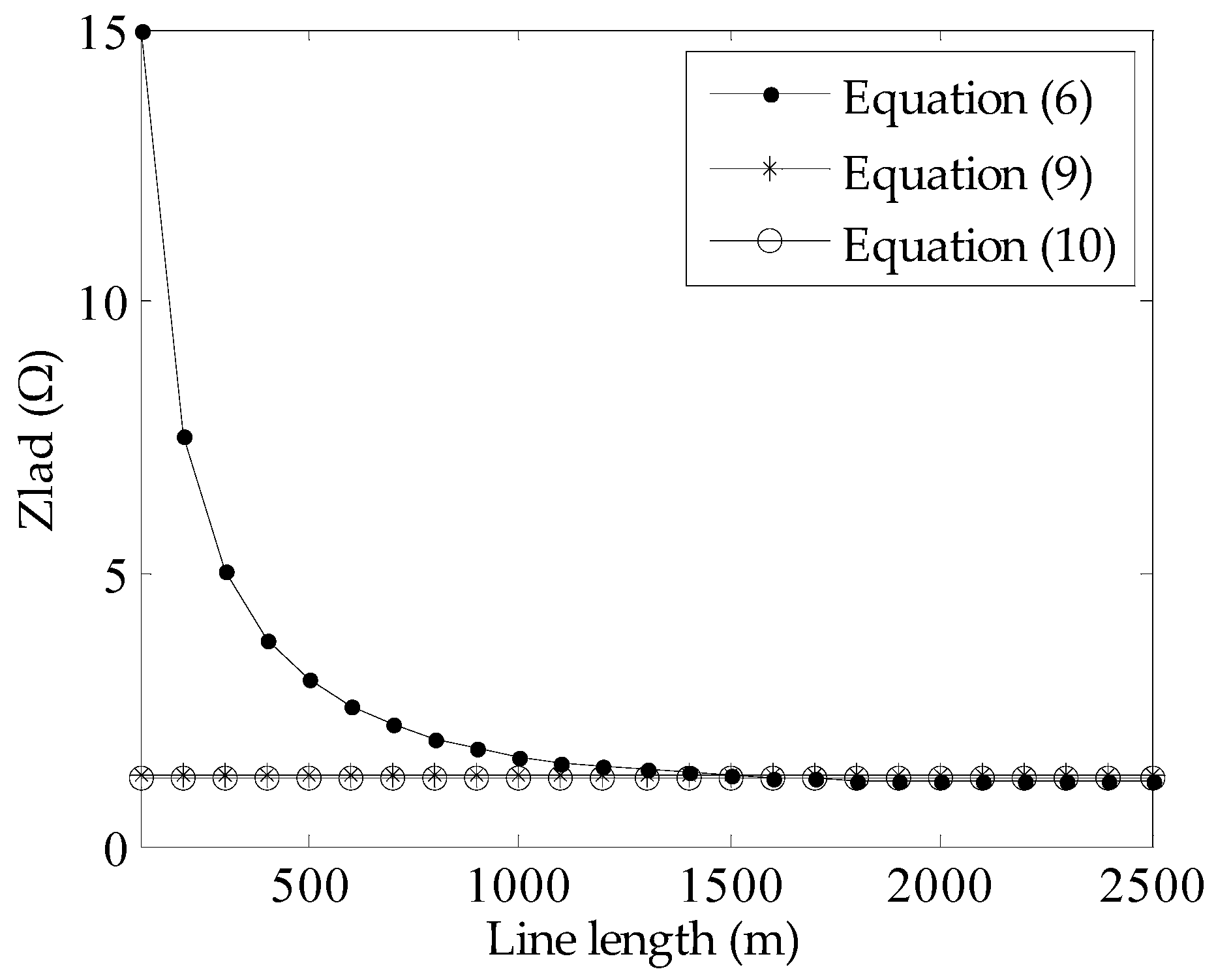
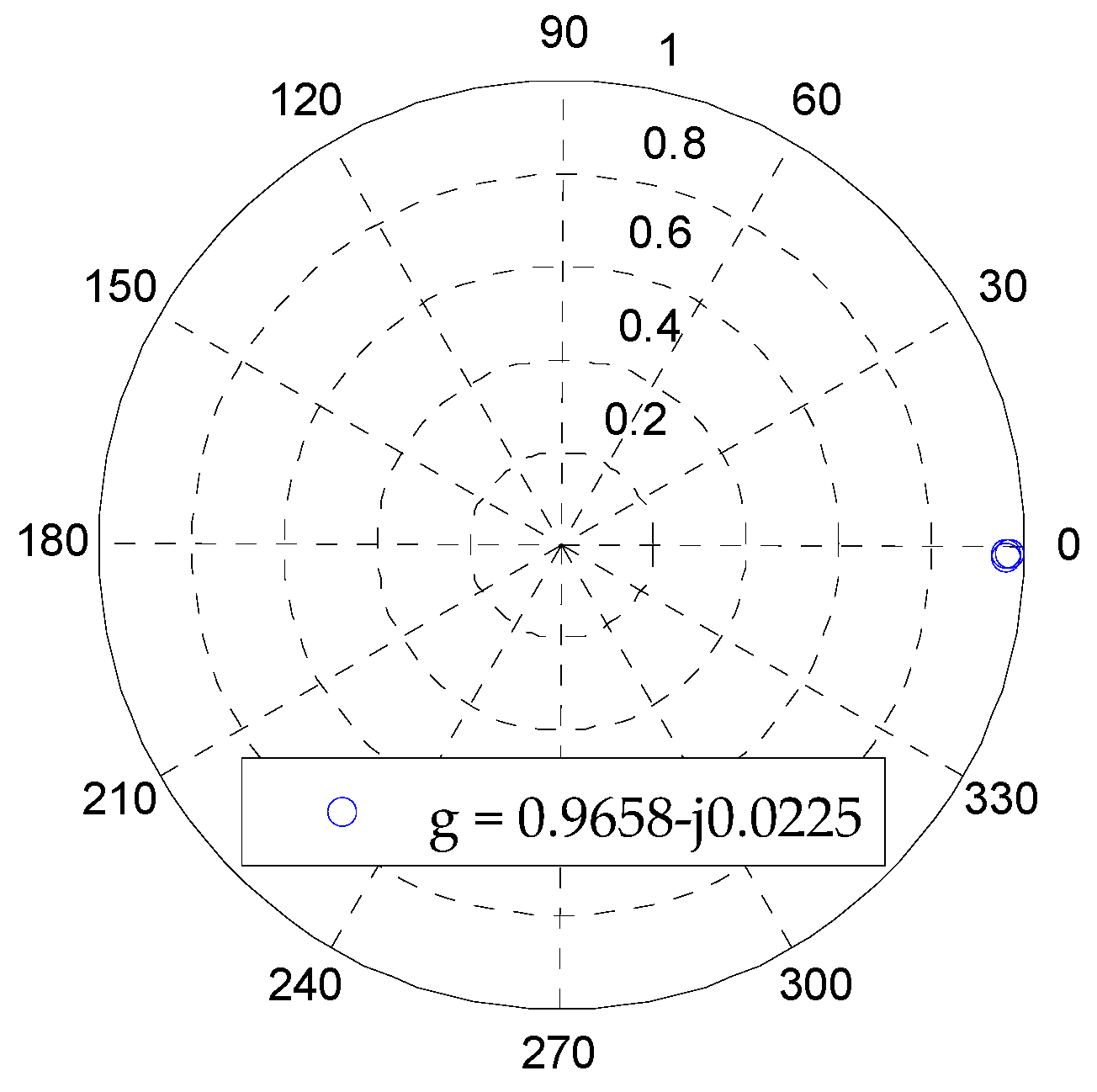
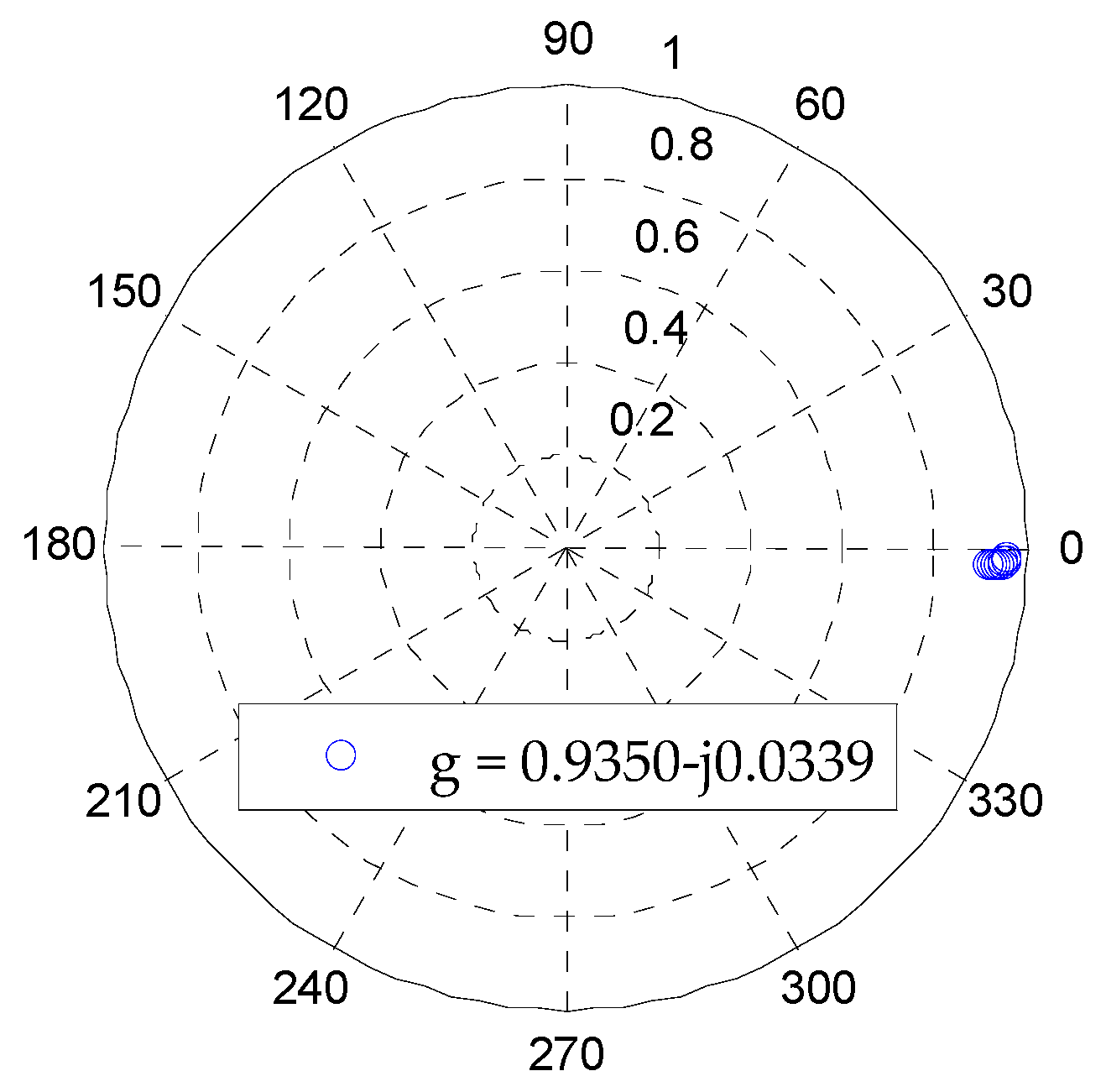
4.1. Validity Verification of Parameter g
- Scenario 1:
- A normal operating condition of the system with RT = 15 Ω and ZMGN = 0.4404 Ω.
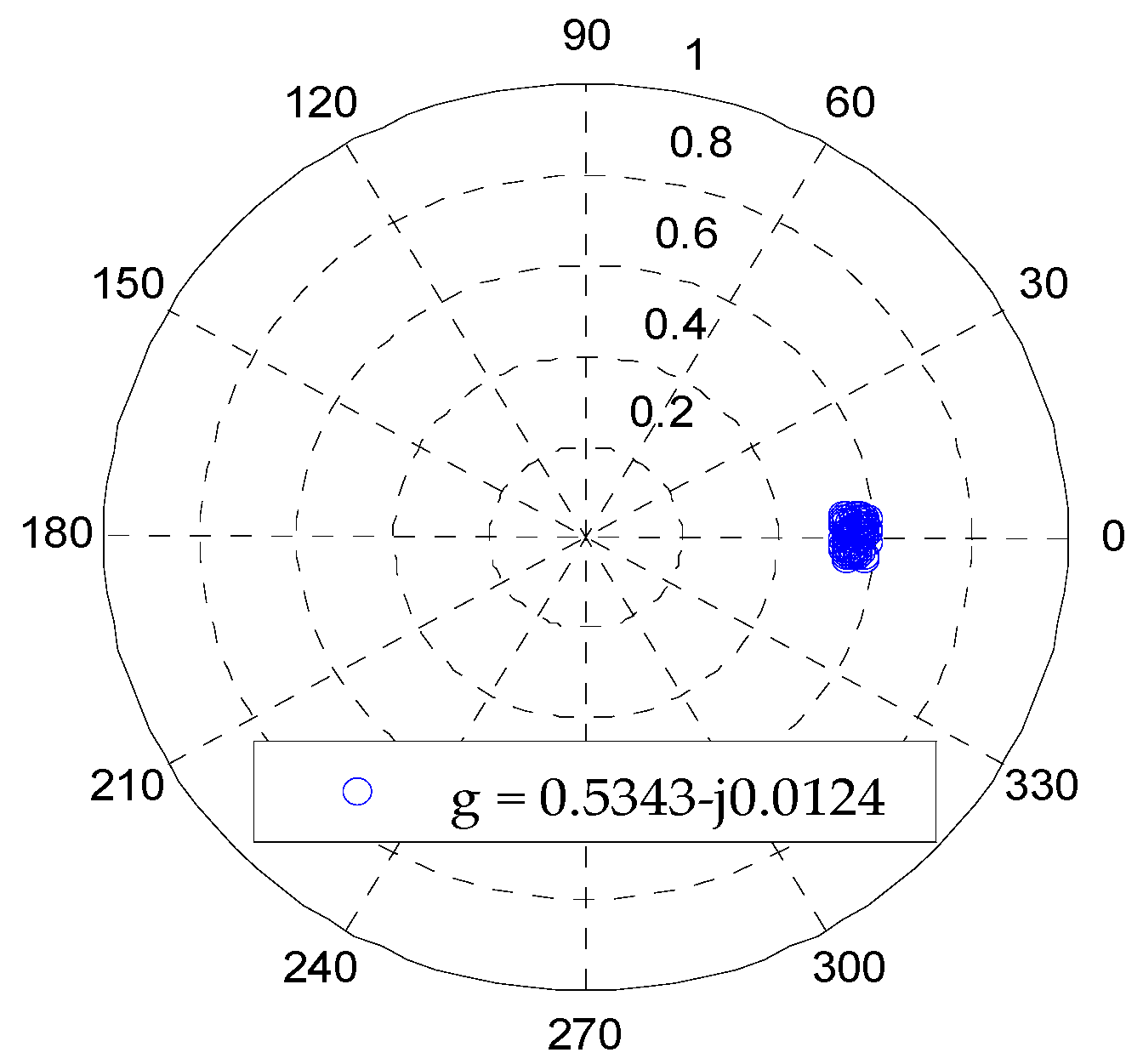
- Scenario 2:
- A broken primary neutral condition with RT = 15 Ω and ZMGN = 7.5 Ω.
- Scenario 3:
- A transformer neutral broken condition with RT = 150 Ω and ZMGN = 0.4404 Ω.
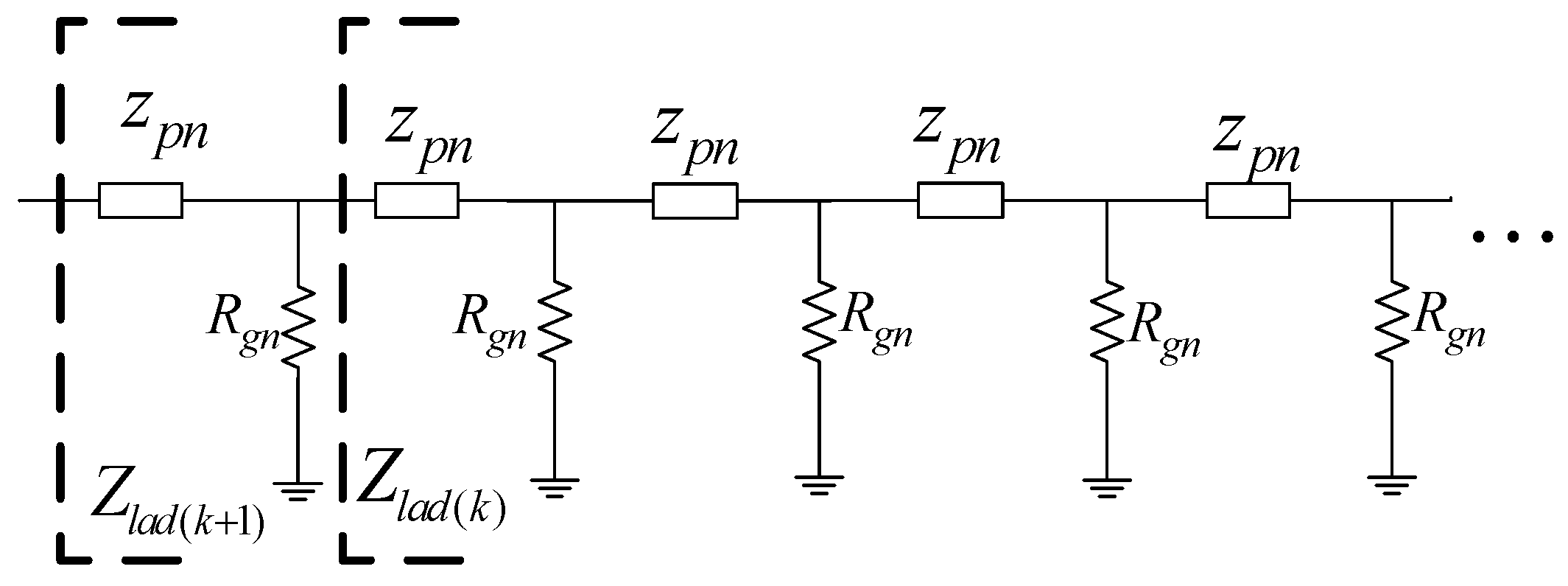
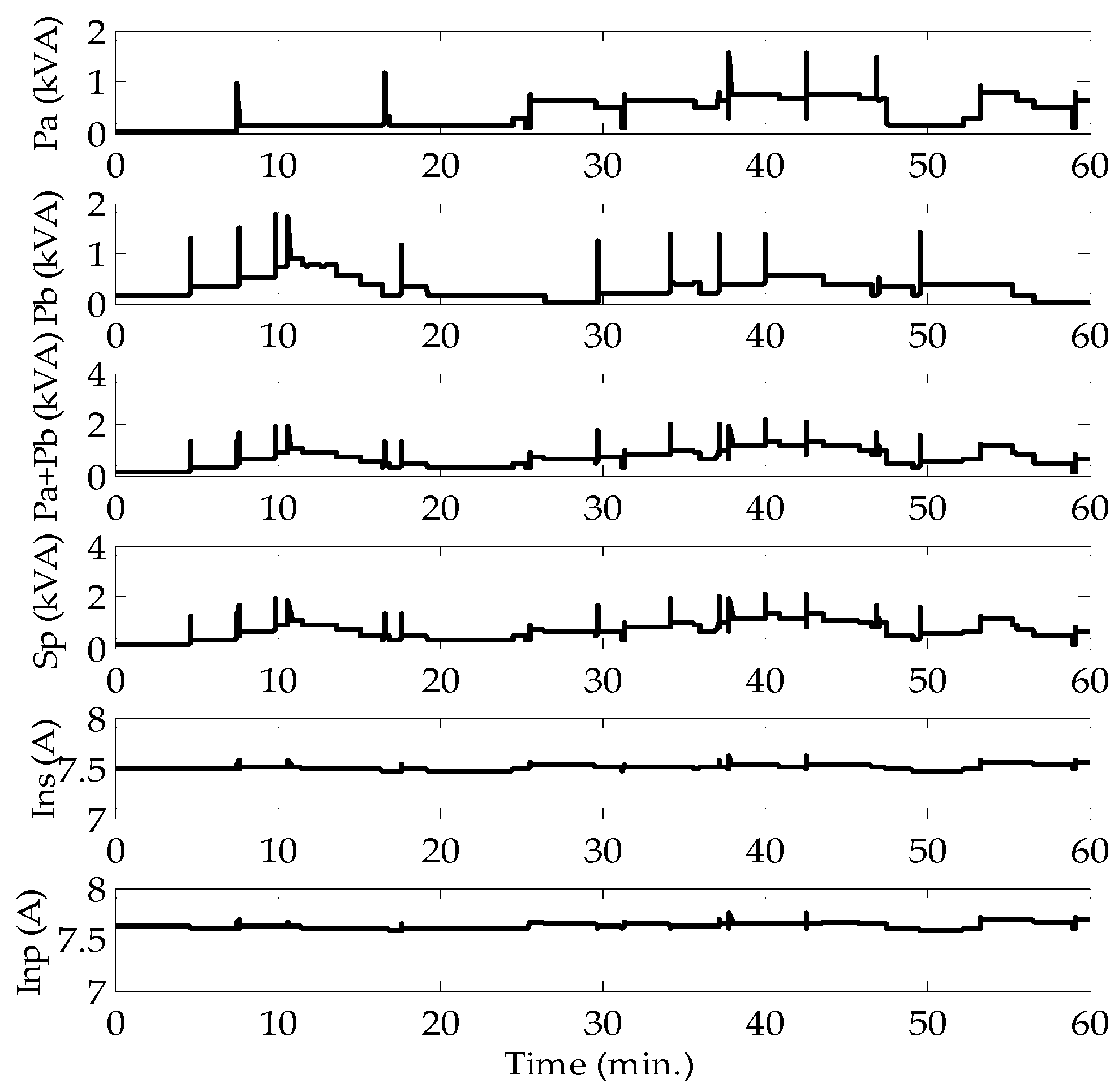
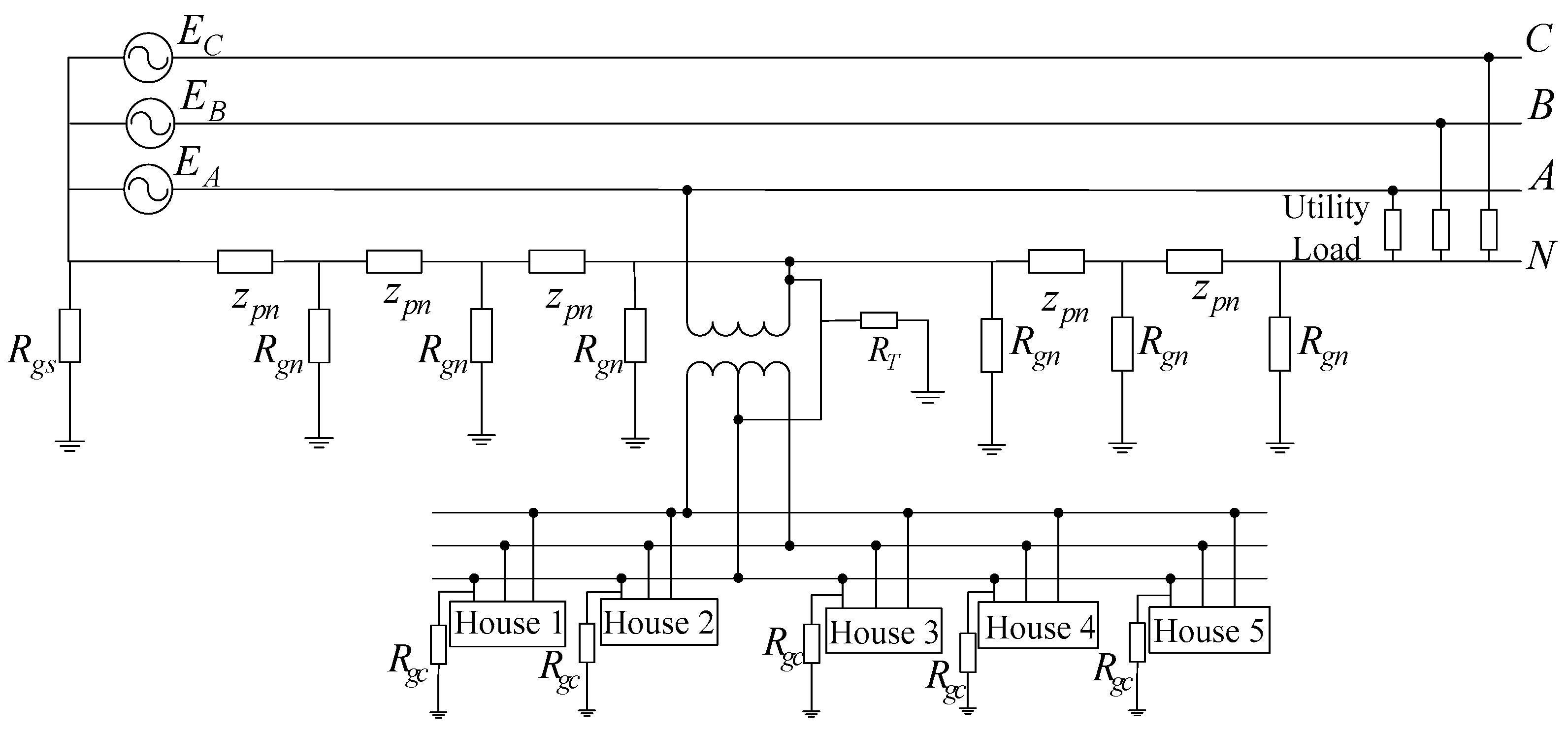
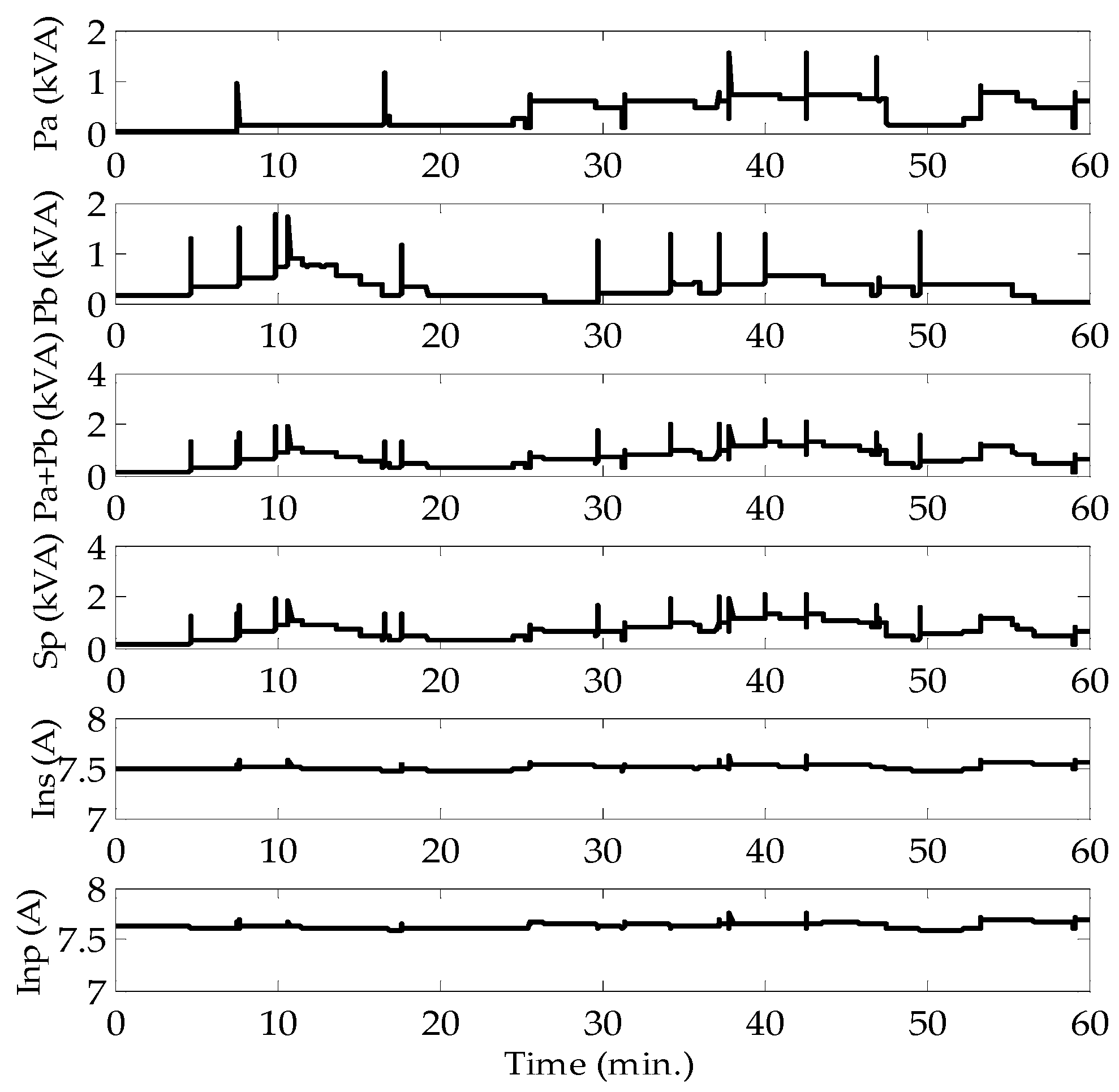
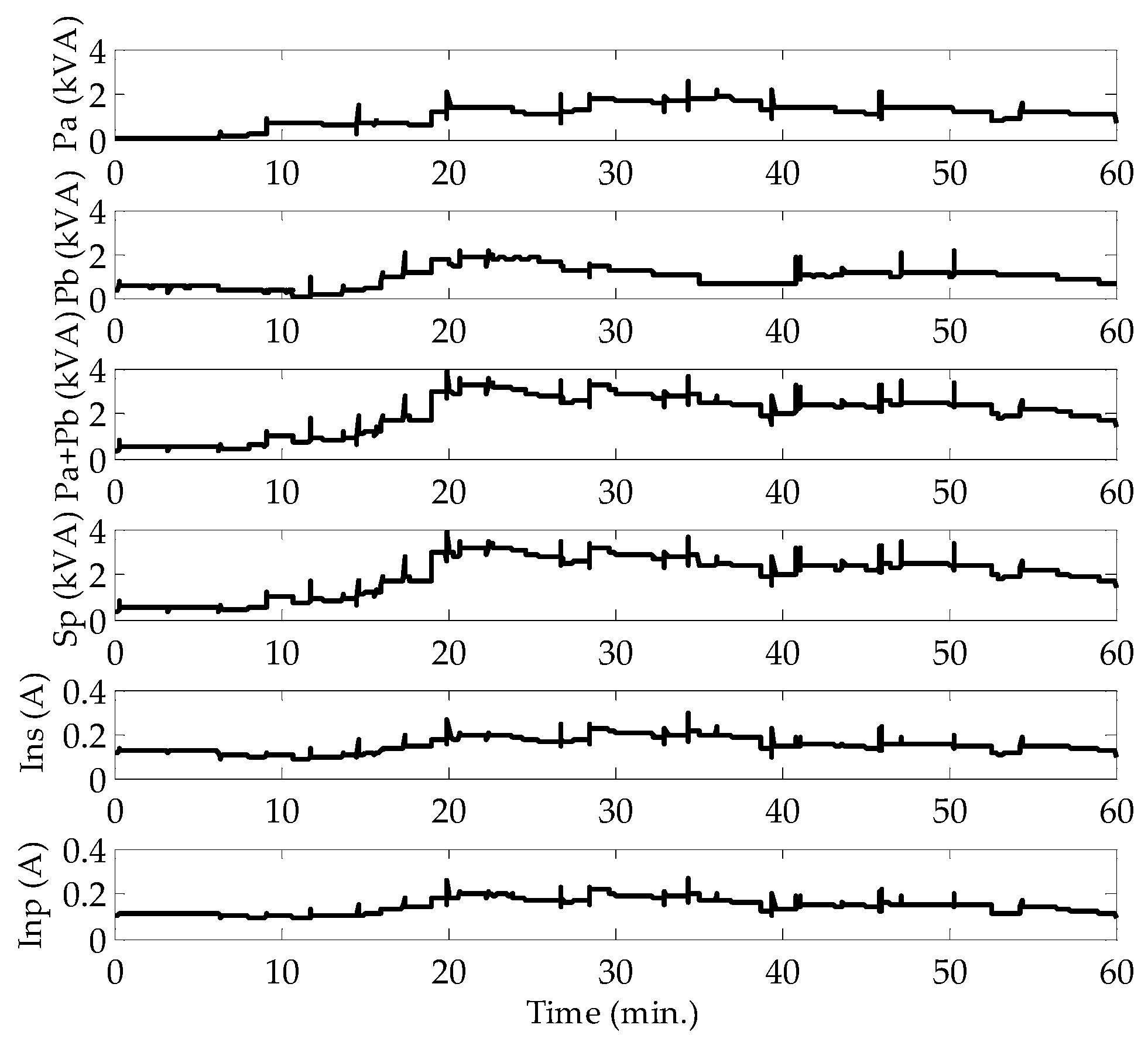
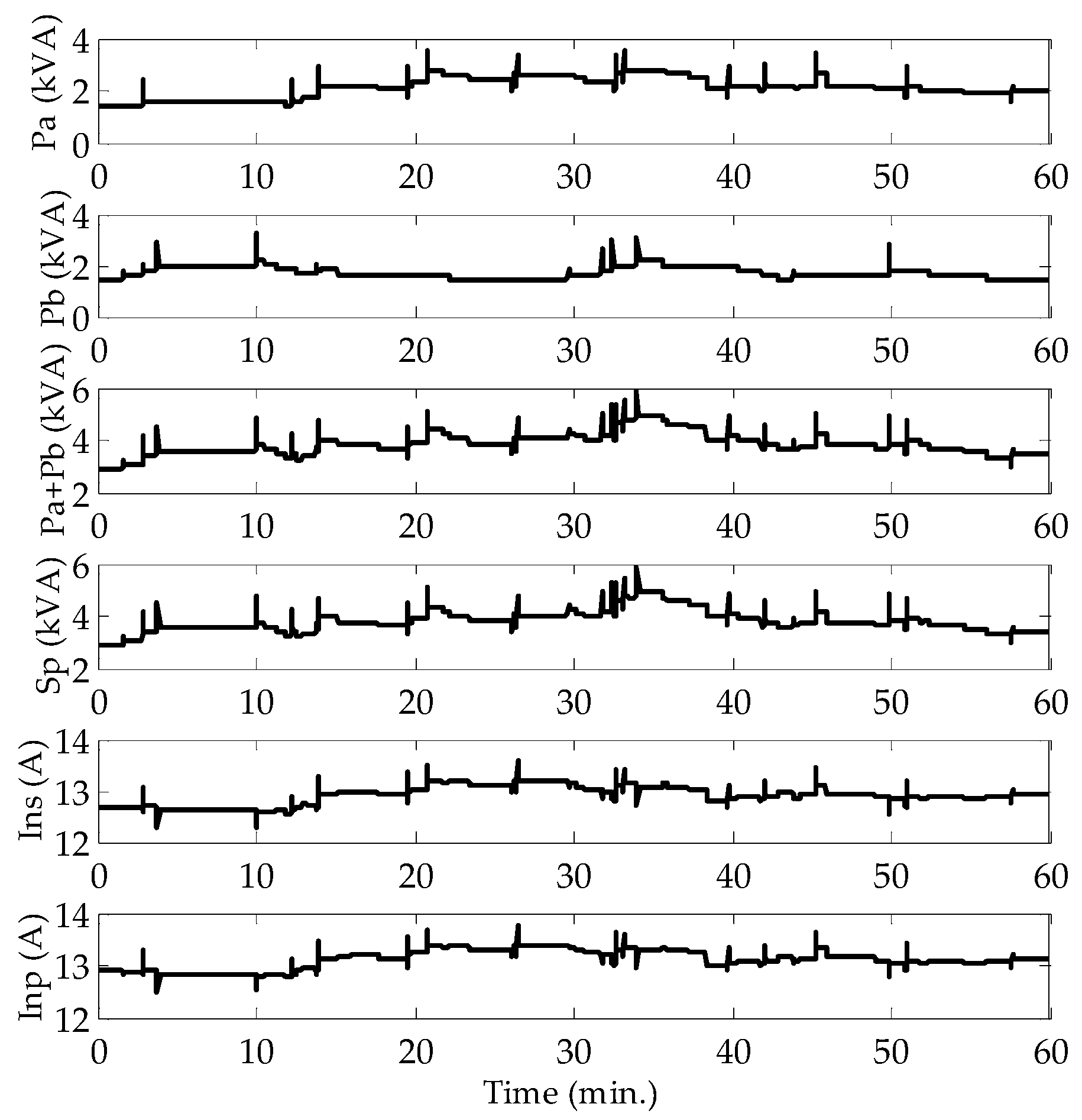
4.2. Verification of the Proposed Method Based on a Typical MGN Network
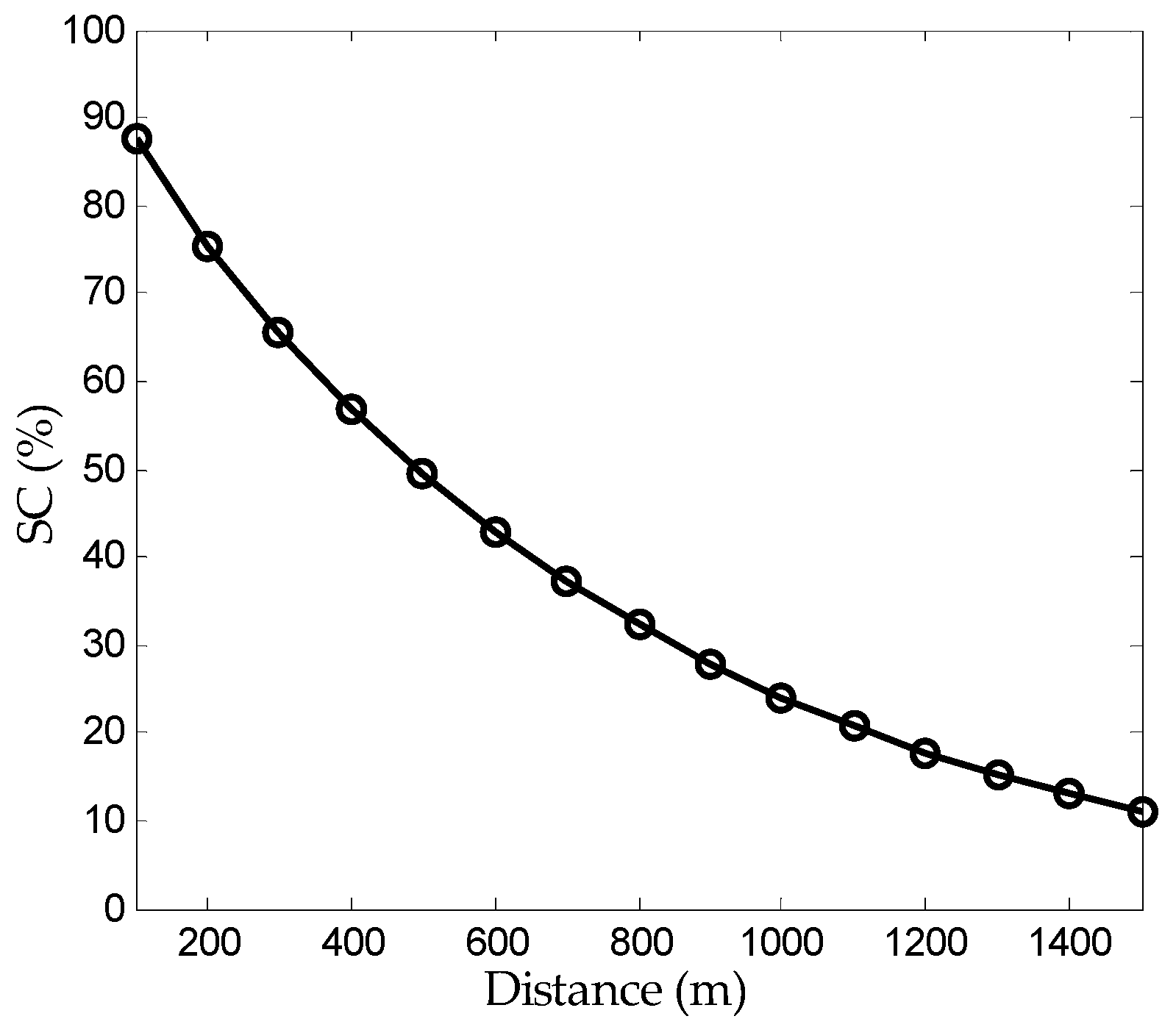
4.3. Monitoring of the Primary Neutral Broken Condition
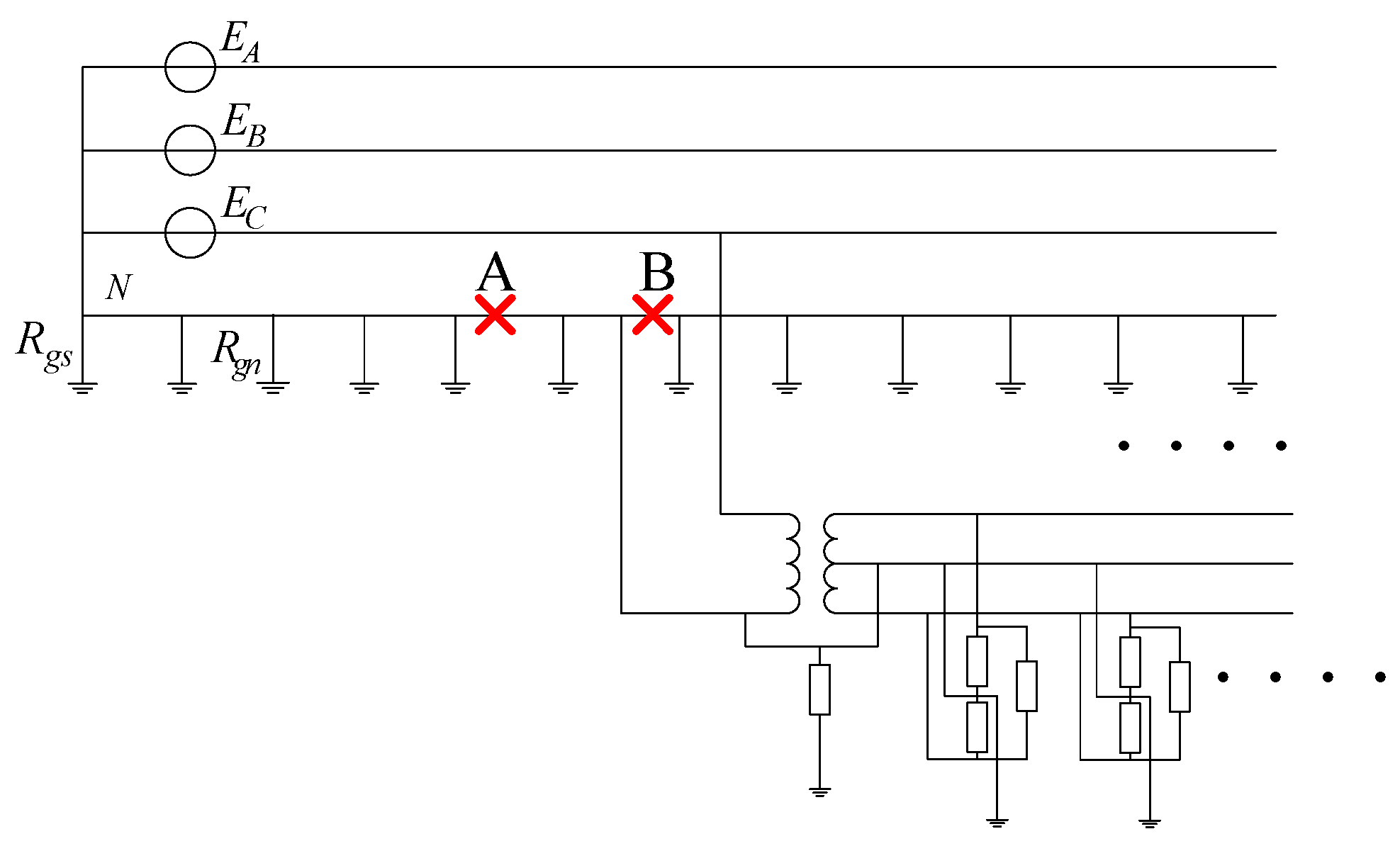
4.3.1. Broken Primary Neutral at Two Sides
4.3.2. Broken Primary Neutral at One Side
4.3.3. Broken Transformer Grounding
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, T.H.; Yang, W.C. Analysis of multi-grounded four-wire distribution systems considering the neutral grounding. IEEE Trans. Power Deliv. 2001, 16, 710–717. [Google Scholar] [CrossRef]
- Parise, G.; Martirano, L.; Parise, L. Ecodesign of ever net-load microgrids. IEEE Trans. Ind. Appl. 2014, 50, 10–16. [Google Scholar] [CrossRef]
- Bouford, J.D. The utility’s perspective on calculating stray voltage. In Proceedings of the 2008 General Meeting of the IEEE-Power-and-Energy-Society, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3.
- Dorr, D.; McGranaghan, M.; Perry, C. Standardized measurements for elevated NEV concerns. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exhibition, Dallas, TX, USA, 21–26 May 2006; pp. 268–271.
- Mitolo, M. Of electrical distribution systems with multiple grounded neutrals. IEEE Trans. Ind. Appl. 2010, 46, 1541–1546. [Google Scholar] [CrossRef]
- Burke, J.; Marshal, M. Distribution system neutral grounding. In Proceedings of the 16th IEEE PES Transmission and Distribution Conference and Exposition, Atlanta, GA, USA, 28 October–2 November 2001; pp. 166–170.
- Agudelo, L.; Ortiz, R.H.; Montoya, M.; Zapata, W.H.; Cardenas, C.; Echeverri, J.C.; Moreno, G. Transferred voltages in multigrounded systems. In Proceedings of the IEEE PES Transmission and Distribution Conference and Exposition-Latin America, Bogota, Colombia, 13–15 August 2008; pp. 1–5.
- Ciric, R.M.; Ochoa, L.F.; Padilla-Feltrin, A.; Nouri, H. Fault analysis in four-wire distribution networks. IEE Proc. Gener. Transm. Distrib. 2005, 152, 977–982. [Google Scholar] [CrossRef]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. A three-phase power flow approach for integrated 3-wire MV and 4-wire multi-grounded LV networks with rooftop solar PV. IEEE Trans. Power Syst. 2013, 28, 1728–1737. [Google Scholar] [CrossRef]
- Ciric, R.M.; Feltrin, A.P.; Ochoa, L.F. Power flow in four-wire distribution networks—General approach. IEEE Trans. Power Syst. 2003, 18, 1283–1290. [Google Scholar] [CrossRef]
- Halevidis, C.; Koufakis, E. Power flow in PME distribution systems during an open neutral condition. IEEE Trans. Power Syst. 2013, 28, 1083–1092. [Google Scholar] [CrossRef]
- Choi, J.; Ahn, Y.; Ryu, H.; Jung, G.; Han, B.; Kim, K. A new method of grounding performance evaluation of multigrounded power systems by ground current measurement. In Proceedings of the International Conference on Power System Technology (POWERCON 2004), Singapore, 21–24 November 2004; pp. 1144–1146.
- Gustafson, R.; Pursley, R.; Albertson, V. Seasonal grounding resistance variations on distribution systems. IEEE Trans. Power Deliv. 1990, 5, 1013–1018. [Google Scholar] [CrossRef]
- Long, X.; Dong, M.; Xu, W.; Li, Y.W. Online monitoring of substation grounding grid conditions using touch and step voltage sensors. IEEE Trans. Smart Grid 2012, 3, 761–769. [Google Scholar] [CrossRef]
- Sunderman, W.G.; Dugan, R.; Dorr, D. The neutral-to-earth voltage (NEV) test case and distribution system analysis. In Proceedings of the 2008 General Meeting of the IEEE-Power-and-Energy-Society, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–7.
- Long, X. Distribution System Condition Monitoring Using Active Disturbances. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2013. [Google Scholar]
- IEEE Standard. National Electrical Safety Code C2-2012; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2012. [Google Scholar]
- Acharya, J.R.; Wang, Y.; Xu, W. Temporary overvoltage and GPR characteristics of distribution feeders with multi-grounded neutral. IEEE Trans. Power Deliv. 2010, 25, 1036–1044. [Google Scholar] [CrossRef]
- Torquato, R.; Shi, Q.; Xu, W.; Freitas, W. A Monte Carlo simulation platform for studying low voltage residential networks. IEEE Trans. Smart Grid 2014, 5, 2766–2776. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Parameters | Values |
|---|---|---|
| Primary System | ZS (Ω) | 0.00249 |
| ZMGN (Ω) | 0.4404 | |
| RT (Ω) | 15 | |
| Secondary System | Rgc (Ω) | 1.0000 |
| Zsn, Zsp (Ω) | 0.0498, 0.0249 | |
| Zan, Zbn, Zab (Ω) | 20, 12, 10 |
| # | Parameters | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|---|
| Equivalent customer loads | Zan (Ω) | 17 | 18 | 19 | 20 |
| Zbn (Ω) | 13.4 | 12.9 | 12.4 | 12 | |
| Zab (Ω) | 10 | 10 | 10 | 10 | |
| Scenario 1 | Ins (A) | 0.06277 | 0.08725 | 0.1113 | 0.1324 |
| Inp (A) | 0.06098 | 0.08476 | 0.1081 | 0.1286 | |
| Scenario 2 | Ins (A) | 0.01533 | 0.02131 | 0.02717 | 0.03233 |
| Inp (A) | 0.01022 | 0.01420 | 0.01812 | 0.02156 | |
| Scenario 3 | Ins (A) | 0.06230 | 0.08659 | 0.1104 | 0.1314 |
| Inp (A) | 0.06212 | 0.08633 | 0.1101 | 0.1310 |
| Parameter | Value |
|---|---|
| Rgs (Ω) | 0.15 |
| Rgn (Ω) | 15 |
| Zline1 (Ω/km) | 0.2494 + 0.8782 |
| zpn (Ω) | 0.04271 + j0.09609 |
| RT (Ω) | 15 |
| Rgc (Ω) | 1 |
| Zline2 (Ω/km) | 0.2028 + j0.0936 |
| Zsn (Ω/km) | 0.5500 + j0.3650 |
| Parameter | Value |
|---|---|
| ZMGN_m (Ω) | 0.5227 + j0.3616 |
| ZMGN_t (Ω) | 0.5265 + j0.3422 |
| SC (%) | 3.15% |
| Parameter | Value |
|---|---|
| ZMGN_m (Ω) | 13.0590 + j0.6512 |
| ZMGN_t (Ω) | 0.5265 + j0.3422 |
| SC (%) | 2002.1% |
| Parameter | Value |
|---|---|
| ZMGN_m (Ω) | 1.0216 + j0.5826 |
| ZMGN_t (Ω) | 0.5265 + j0.3422 |
| SC (%) | 87.64% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, X.; Sun, Y.; Long, X.; Zhang, B. A New Method to Monitor the Primary Neutral Integrity in Multi-Grounded Neutral Systems. Energies 2017, 10, 380. https://doi.org/10.3390/en10030380
Xie X, Sun Y, Long X, Zhang B. A New Method to Monitor the Primary Neutral Integrity in Multi-Grounded Neutral Systems. Energies. 2017; 10(3):380. https://doi.org/10.3390/en10030380
Chicago/Turabian StyleXie, Xiangmin, Yuanyuan Sun, Xun Long, and Bingwei Zhang. 2017. "A New Method to Monitor the Primary Neutral Integrity in Multi-Grounded Neutral Systems" Energies 10, no. 3: 380. https://doi.org/10.3390/en10030380
APA StyleXie, X., Sun, Y., Long, X., & Zhang, B. (2017). A New Method to Monitor the Primary Neutral Integrity in Multi-Grounded Neutral Systems. Energies, 10(3), 380. https://doi.org/10.3390/en10030380