Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System

Abstract
1. Introduction
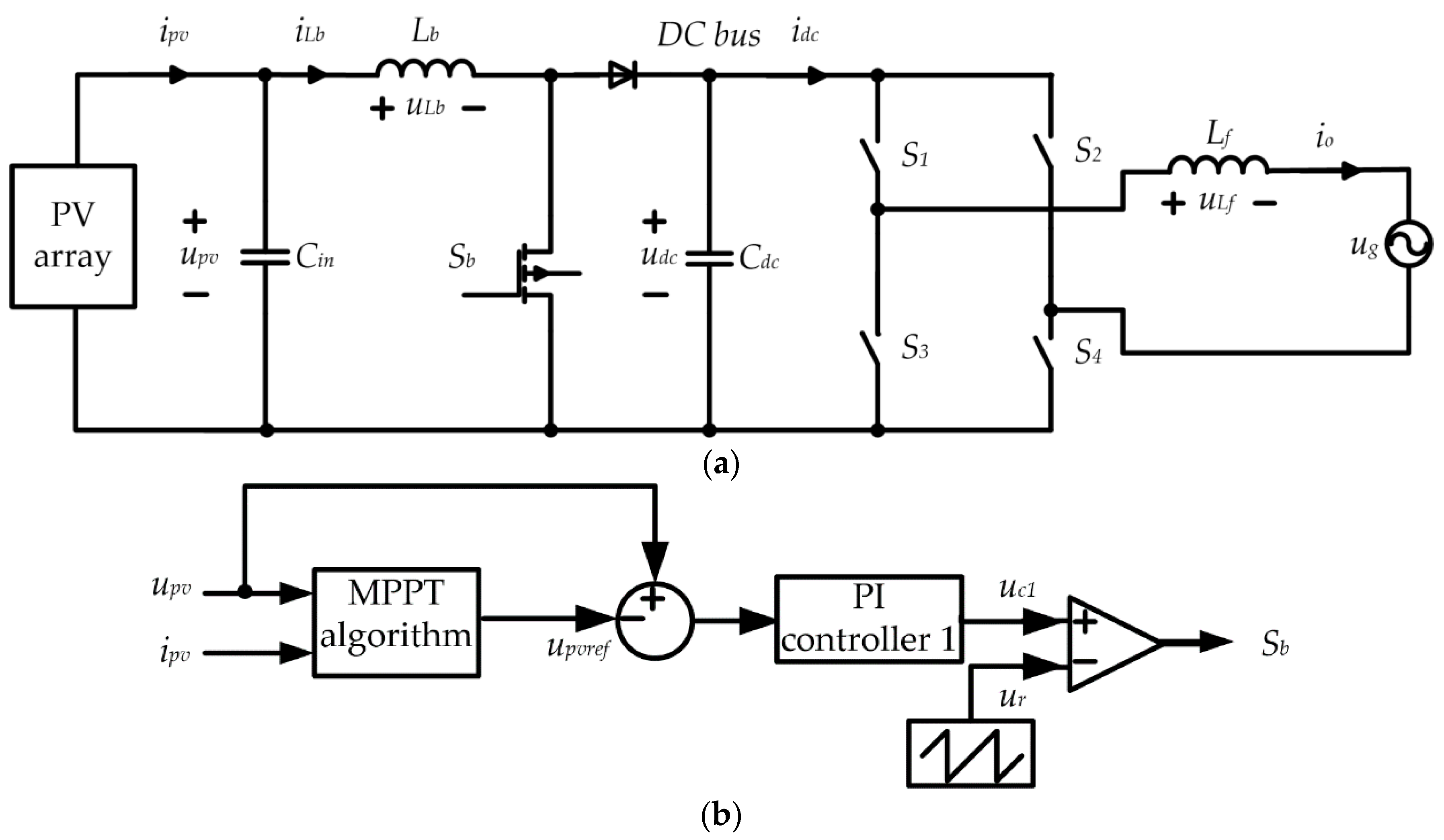
2. System Description and Nonlinear Averaged Equations
2.1. PV Array
2.2. Power Stage Circuit
2.3. Controller
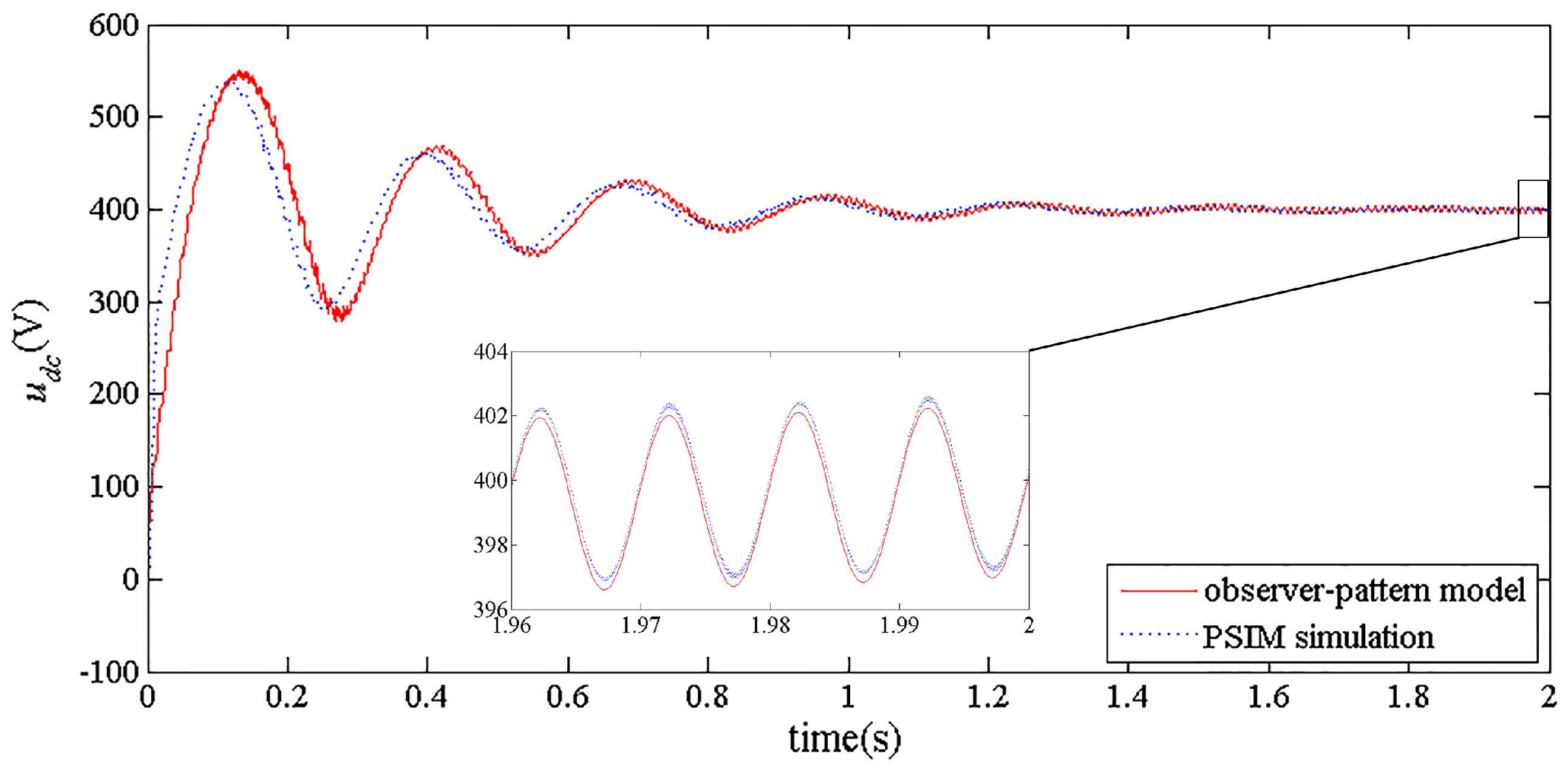
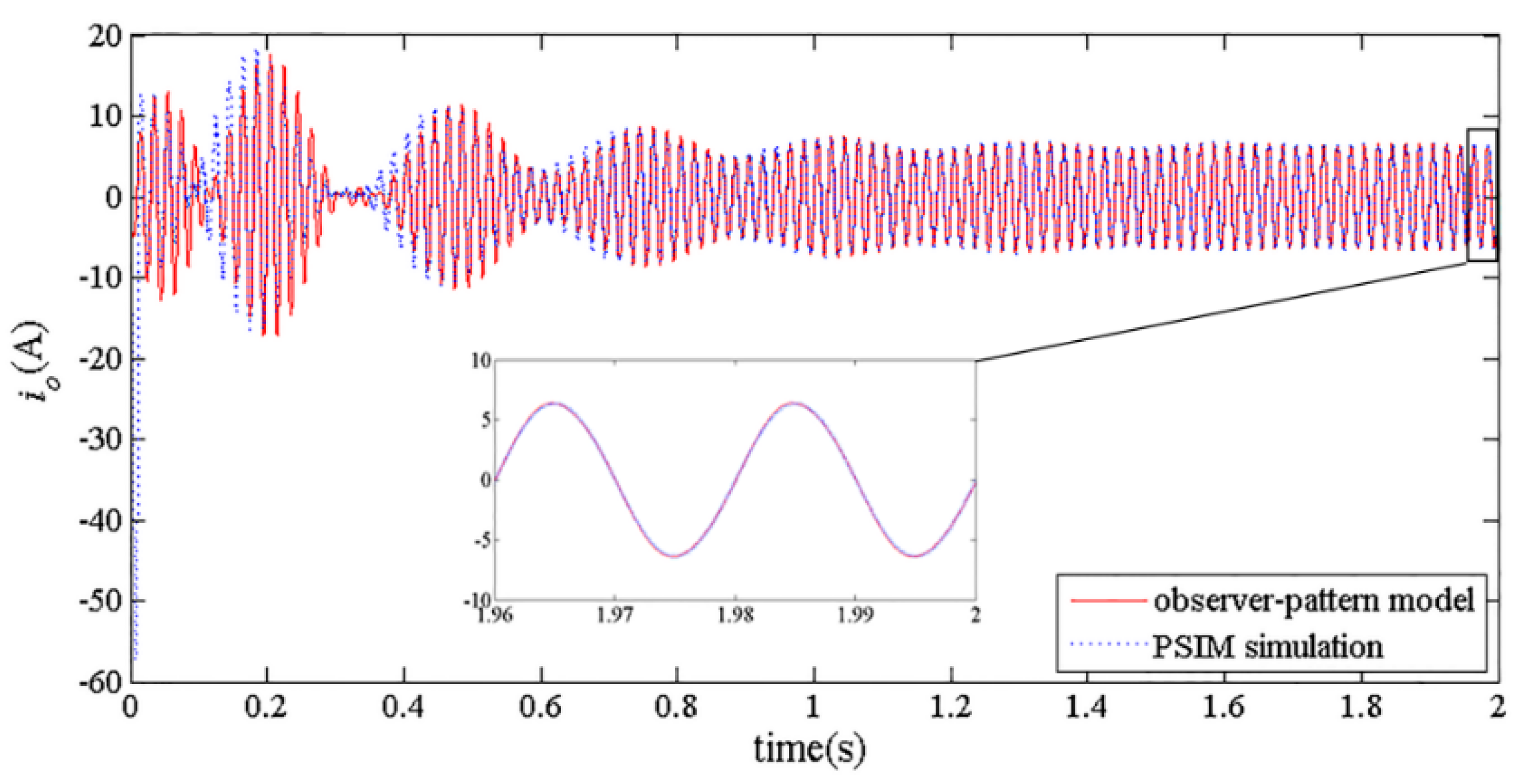
3. Observer-Pattern Model
4. Stability Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Cucchiella, F.; D’Adamo, I.; Gastaldi, M. Economic analysis of a photovoltaic system: A resource for residential households. Energies 2017, 10, 814. [Google Scholar] [CrossRef]
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter Technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Schimpf, F.; Norum, L. Effective use of film capacitors in single-phase PV-inverters by active power decoupling. In Proceedings of the 36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 2784–2789. [Google Scholar]
- Nižetić, S.; Papadopoulos, A.M.; Tina, G.M.; Rosa-Clot, M. Hybrid energy scenarios for residential applications based on the heat pump split air-conditioning units for operation in the Mediterranean climate conditions. Energy Build. 2017, 140, 110–120. [Google Scholar] [CrossRef]
- Xiong, X.; Chi, K.T.; Ruan, X. Bifurcation Analysis of Standalone Photovoltaic-Battery Hybrid Power System. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 1354–1365. [Google Scholar] [CrossRef]
- Deivasundari, P.; Uma, G.; Poovizhi, R. Analysis and experimental verification of Hopf bifurcation in a solar photovoltaic powered hysteresis current-controlled cascaded-boost converter. IET Power Electron. 2013, 6, 763–773. [Google Scholar] [CrossRef]
- Zhioua, M.; Aroudi, A.E.; Belghith, S.; Bosquemoncusí, J.M.; Giral, R.; Hosani, K.A.; Alnumay, M. Modeling, Dynamics, Bifurcation Behavior and Stability Analysis of a DC–DC Boost Converter in Photovoltaic Systems. Int. J. Bifurc. Chaos 2016, 26, 1650166. [Google Scholar] [CrossRef]
- Al-Hindawi, M.M.; Abusorrah, A.; Al-Turki, Y.; Giaouris, D.; Mandal, K.; Banerjee, S. Nonlinear Dynamics and Bifurcation Analysis of a Boost Converter for Battery Charging in Photovoltaic Applications. Int. J. Bifurc. Chaos 2014, 24, 373–491. [Google Scholar] [CrossRef]
- Abusorrah, A.; Al-Hindawi, M.M.; Al-Turki, Y.; Mandal, K.; Giaouris, D.; Banerjee, S.; Voutetakis, S.; Papadopoulou, S. Stability of a boost converter fed from photovoltaic source. Sol. Energy 2013, 98, 458–471. [Google Scholar] [CrossRef]
- Li, X.; Tang, C.; Dai, X.; Hu, A.; Nguang, S. Bifurcation Phenomena Studies of a Voltage Controlled Buck-Inverter Cascade System. Energies 2017, 10, 708. [Google Scholar] [CrossRef]
- Tse, C.K.; Bernardo, M.D. Complex behavior in switching power converters. Proc. IEEE 2002, 90, 768–781. [Google Scholar] [CrossRef]
- Banerjee, S.; Chakrabarty, K. Nonlinear modeling and bifurcations in the boost converter. IEEE Trans. Power Electron. 1998, 13, 252–260. [Google Scholar] [CrossRef]
- Deane, J.H.B.; Hamill, D.C. Instability, subharmonics, and chaos in power electronic systems. IEEE Trans. Power Electron. 1989, 5, 260–268. [Google Scholar] [CrossRef]
- Aroudi, A.E.; Giaouris, D.; Mandal, K.; Banerjee, S. Complex non-linear phenomena and stability analysis of interconnected power converters used in distributed power systems. IET Power Electron. 2016, 9, 855–863. [Google Scholar] [CrossRef]
- Saublet, L.M.; Gavagsaz-Ghoachani, R.; Martin, J.P.; Nahid-Mobarakeh, B.; Pierfederici, S. Asymptotic Stability Analysis of the Limit Cycle of a Cascaded DC–DC Converter Using Sampled Discrete-Time Modeling. IEEE Trans. Ind. Electron. 2016, 63, 2477–2487. [Google Scholar] [CrossRef]
- Zadeh, M.K.; Gavagsaz-Ghoachani, R.; Pierfederici, S.; Nahid-Mobarakeh, B.; Molinas, M. Stability Analysis and Dynamic Performance Evaluation of a Power Electronics-Based DC Distribution System with Active Stabilizer. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 93–102. [Google Scholar] [CrossRef]
- Xie, F.; Zhang, B.; Qiu, D.; Jiang, Y. Non-linear dynamic behaviours of DC cascaded converters system with multi-load converters. IET Power Electron. 2016, 9, 1093–1102. [Google Scholar] [CrossRef]
- Salis, V.; Costabeber, A.; Cox, S.M.; Zanchetta, P. Stability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance Estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1513–1525. [Google Scholar] [CrossRef]
- Cai, H.; Xiang, J.; Wei, W. Modelling, analysis and control design of a two-stage photovoltaic generation system. IET Renew. Power Gener. 2016, 10, 1195–1203. [Google Scholar] [CrossRef]
- Zadeh, M.K.; Gavagsaz-Ghoachani, R.; Nahid-Mobarakeh, B.; Pierfederici, S.; Molinas, M. Stability analysis of hybrid AC/DC power systems for more electric aircraft. In Proceedings of the Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 20–24 May 2016; pp. 446–452. [Google Scholar]
- Zhang, H.; Wan, X.; Li, W.; Ding, H.; Yi, C. Observer-Pattern Modeling and Slow-Scale Bifurcation Analysis of Two-Stage Boost Inverters. Int. J. Bifurc. Chaos 2017, 27, 1750096. [Google Scholar] [CrossRef]
- Zhang, H.; Li, W.; Ding, H.; Yi, C.; Wan, X. Observer-Pattern Modeling and Nonlinear Modal Analysis of Two-stage Boost Inverter. IEEE Trans. Power Electron. 2017. [Google Scholar] [CrossRef]
- Ram, J.P.; Babu, T.S.; Rajasekar, N. A comprehensive review on solar PV maximum power point tracking techniques. Renew. Sustain. Energy Rev. 2017, 67, 826–847. [Google Scholar] [CrossRef]
- Fadil, H.E.; Giri, F.; Guerrero, J.M. Grid-connected of photovoltaic module using nonlinear control. In Proceedings of the IEEE International Symposium on Power Electronics for Distributed Generation Systems, Aalborg, Denmark, 25–28 June 2012; pp. 119–124. [Google Scholar]
- Franzitta, V.; Orioli, A.; Gangi, A.D. Assessment of the Usability and Accuracy of the Simplified One-Diode Models for Photovoltaic Modules. Energies 2016, 9, 1019. [Google Scholar] [CrossRef]
- Khouzam, K.; Ly, C.; Chen, K.K.; Ng, P.Y. Simulation and real-time modelling of space photovoltaic systems. In Proceedings of the 1994 IEEE 1st World Conference on Photovoltaic Energy Conversion, Waikoloa, HI, USA, 5–9 December 1994; Volume 2, pp. 2038–2041. [Google Scholar]
- Zhang, R.; Cardinal, M.; Szczesny, P.; Dame, M. A grid simulator with control of single-phase power converters in D-Q rotating frame. In Proceedings of the 2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference, Cairns, Australia, 23–27 June 2002; Volume 3, pp. 1431–1436. [Google Scholar]
- Gao, F.; Zheng, X.; Bozhko, S.; Hill, C.I.; Asher, G. Modal Analysis of a PMSG-Based DC Electrical Power System in the More Electric Aircraft Using Eigenvalues Sensitivity. IEEE Trans. Transp. Electrification 2015, 1, 65–76. [Google Scholar]
- Yang, L.; Xu, Z.; Østergaard, J.; Dong, Z.Y.; Wong, K.P.; Ma, X. Oscillatory Stability and Eigenvalue Sensitivity Analysis of A DFIG Wind Turbine System. IEEE Trans. Energy Convers. 2011, 26, 328–339. [Google Scholar] [CrossRef]
- Shi, Y.; Liu, B.; Duan, S. Low-Frequency Input Current Ripple Reduction Based on Load Current Feedforward in a Two-Stage Single-Phase Inverter. IEEE Trans. Power Electron. 2016, 31, 7972–7985. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Quantity |
|---|---|---|
| Voltage at MPP | UM | 119.6 V |
| Current at MPP | IM | 8.36 A |
| Open circuit voltage | UOC | 149.2 V |
| Short circuit current | ISC | 8.81 A |
| Parameter | Symbol | Quantity |
|---|---|---|
| Capacitance of input filter | Cin | 1000 μF |
| Inductance of boost converter | Lb | 10 mH |
| Capacitance of boost converter | Cdc | 1500 μF |
| Inductance of output filter | Lf | 25 mH |
| Amplitude of grid voltage | Ugm | 220√2 V |
| Switching frequency | fs | 10 kHz |
| Gain of PI controller 1 | Kp1 | 0.05 |
| Time constant of PI controller 1 | Ti1 | 0.1 |
| Gain of PI controller 2 | Kp2 | 0.02 |
| Time constant of PI controller 2 | Ti2 | 0.01 |
| Gain of PI controller 3 | Kp3 | 1 |
| Time constant of PI controller 3 | Ti3 | 0.2 |
| λ1,2 | λ3,4 | λ5 | λ6,7 | λ8,9 | λ10,11 | |
|---|---|---|---|---|---|---|
| Kp1 | −8.93 × 10-4 ± j7.47 × 10-5 | 5.57 ± j1.38 × 104 | −9.31 | −0.91 ± j0.145 | −2.45 × 10-5 ± j2.42 × 10-4 | 0 |
| Ti1 | −2.78 × 10-7 ± j2.88 × 10-8 | −47.5 ± j0.21 | 94.9 | 0.0286 ± j0.193 | 3.85 × 10-6 ± j3.28 × 10-7 | 0 |
| Kp2 | −937 ± j35.6 | −0.605 ± j0.188 | −0.664 | −134 ± j553 | 0.00347 ± j0.00126 | 0 |
| Ti2 | −11.8 ± j0.68 | −0.0211 ± j0.0846 | 1.47 | 11 ± j1144 | 1.22 × 10-4 ± j0.00224 | 0 |
| Kp3 | −1.6 × 104 ± j0.977 | 7.45 × 10-4 ± j0.00145 | −1.35 × 10-4 | 0.236 ± j0.0336 | 0.00154 ± j0.00409 | 0 |
| Ti3 | −25 ± j7.68 × 10-4 | 2.62 × 10-5 ± j1.36 × 10-5 | 2.21 × 10-5 | 0.00141 ± j0.0192 | 25 ± j0.0208 | 0 |
| Ti1 | λ1,2 | λ3,4 | λ5 | λ6,7 | λ8,9 | λ10,11 |
|---|---|---|---|---|---|---|
| 0.01 | −16016 ± j314 | 26.8 ± j1453 | −94.7 | −2.947 ± j22.55 | −5 ± j314 | ±j628 |
| 0.03 | −16016 ± j314 | −4.743 ± j1451 | −31.6 | −2.927 ± j22.56 | −5 ± j314 | ±j628 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Qiu, D.; Xie, F.; Chen, Y.; Zhang, B. Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System. Energies 2017, 10, 2176. https://doi.org/10.3390/en10122176
Huang L, Qiu D, Xie F, Chen Y, Zhang B. Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System. Energies. 2017; 10(12):2176. https://doi.org/10.3390/en10122176
Chicago/Turabian StyleHuang, Liying, Dongyuan Qiu, Fan Xie, Yanfeng Chen, and Bo Zhang. 2017. "Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System" Energies 10, no. 12: 2176. https://doi.org/10.3390/en10122176
APA StyleHuang, L., Qiu, D., Xie, F., Chen, Y., & Zhang, B. (2017). Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System. Energies, 10(12), 2176. https://doi.org/10.3390/en10122176