On Conceptual Structuration and Coupling Methods of Co-Simulation Frameworks in Cyber-Physical Energy System Validation


Abstract
:1. Introduction
2. Conceptual Structuration of Co-Simulation Framework
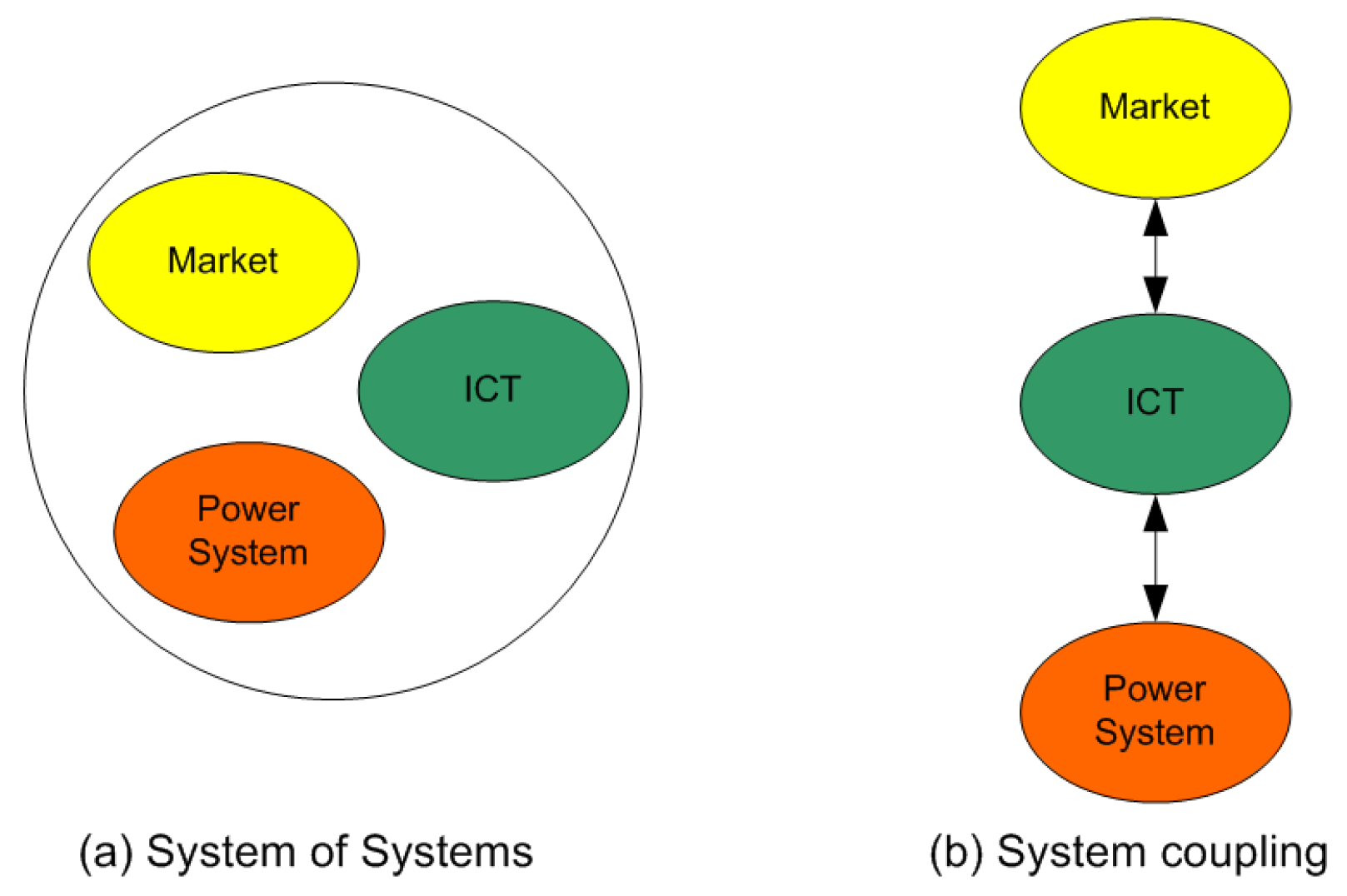
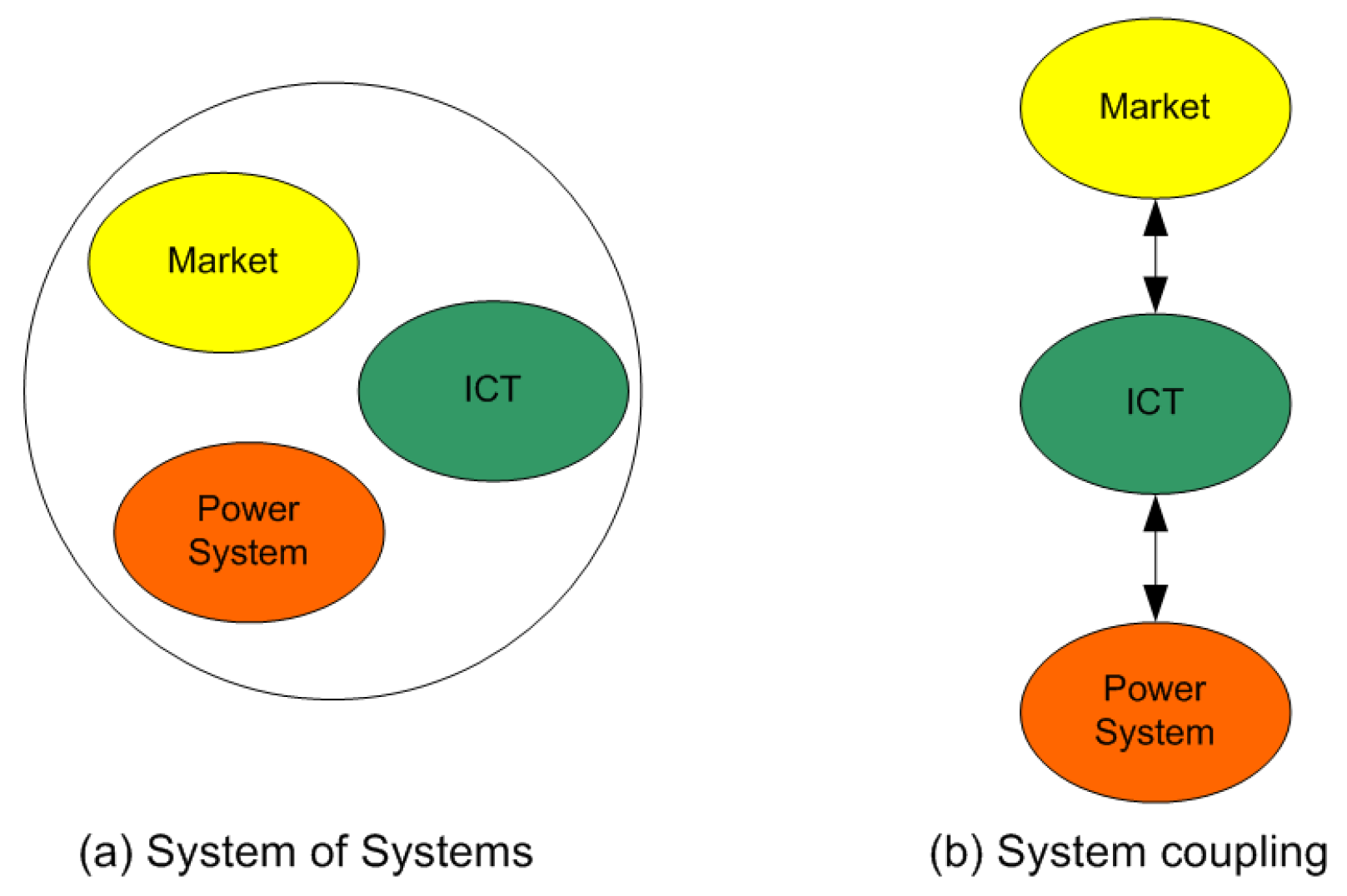
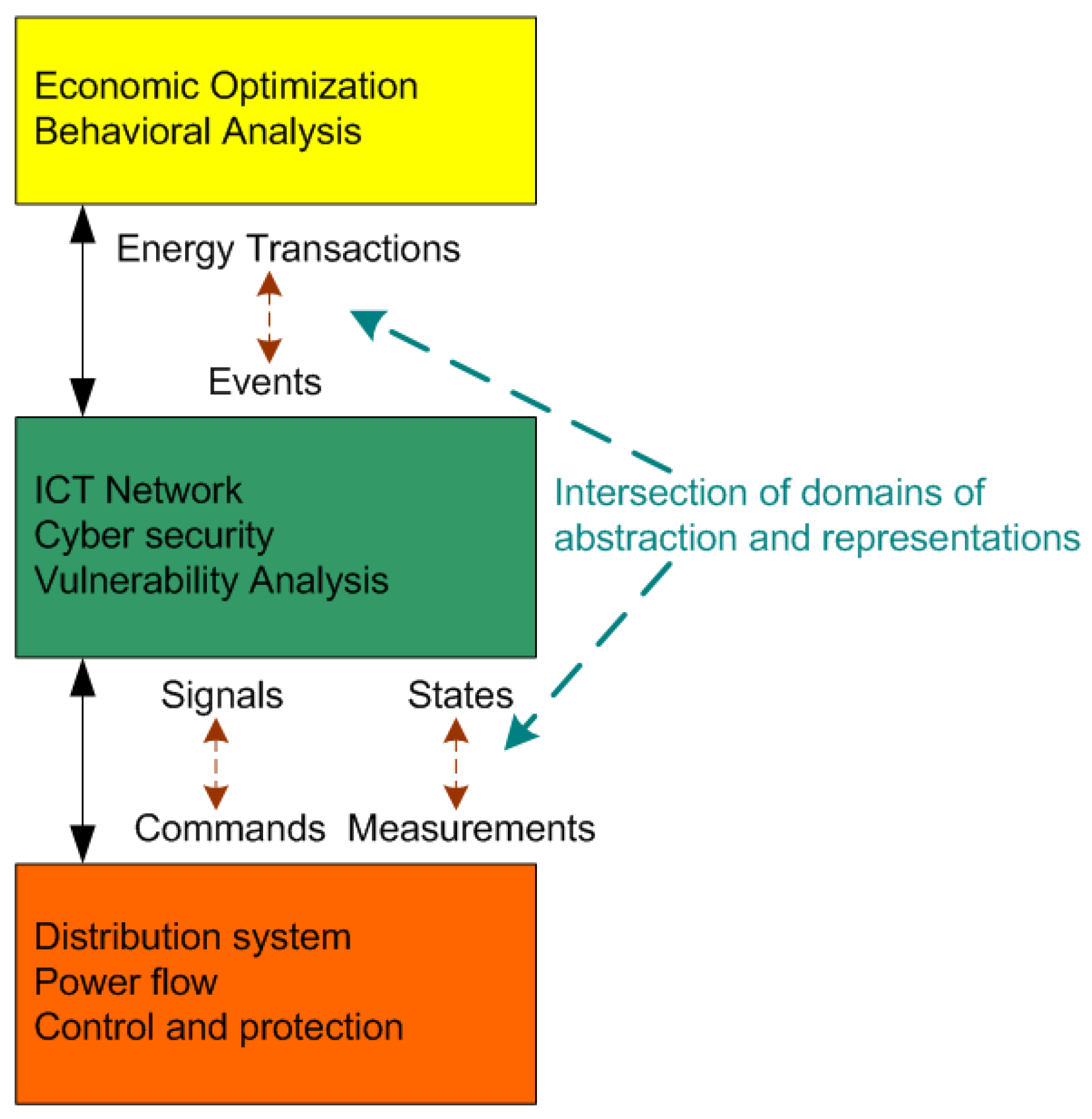
2.1. Conceptual Layer: Architecture
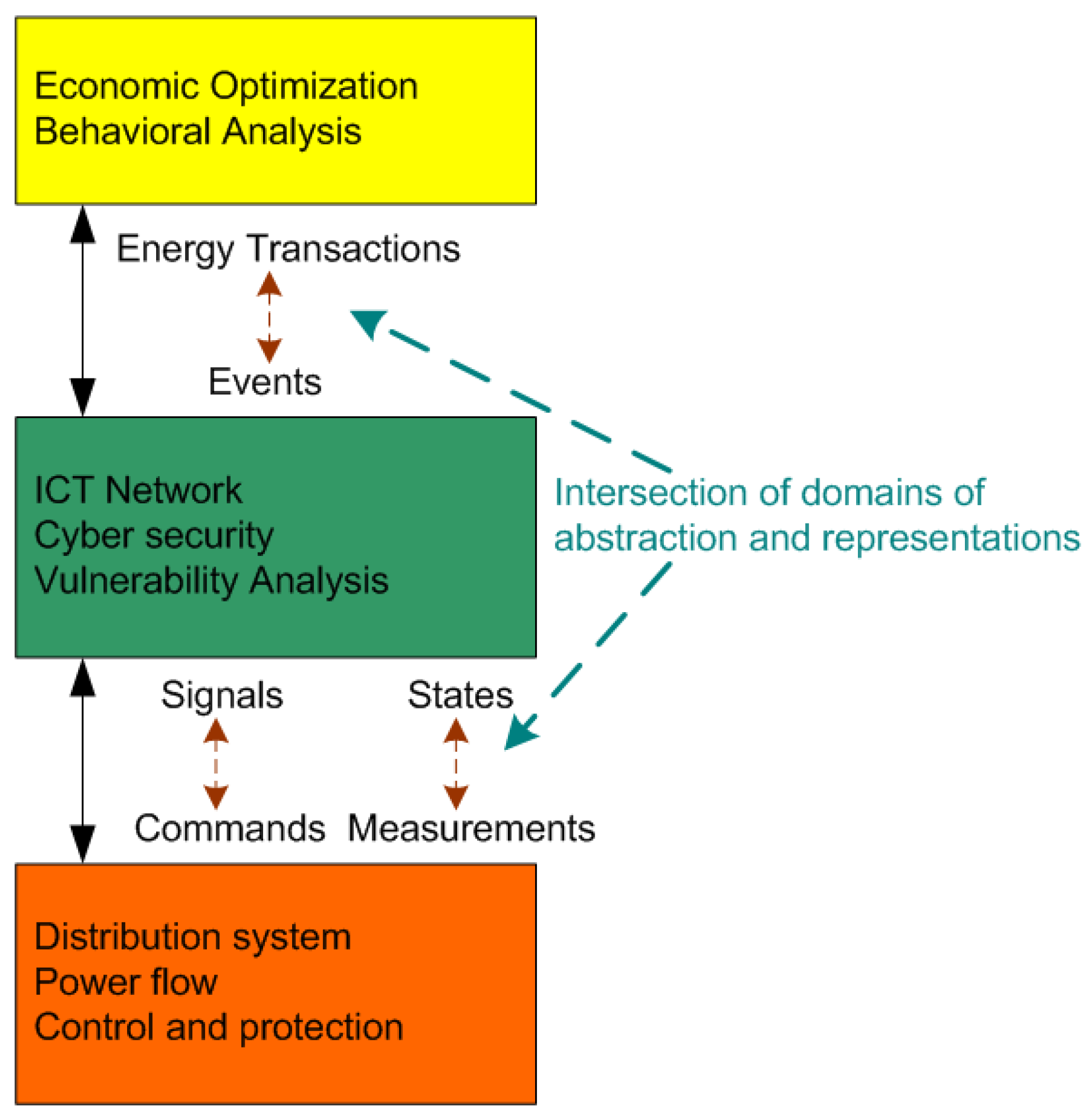
2.2. Semantic Layer: Formal integration
2.3. Syntactic Layer
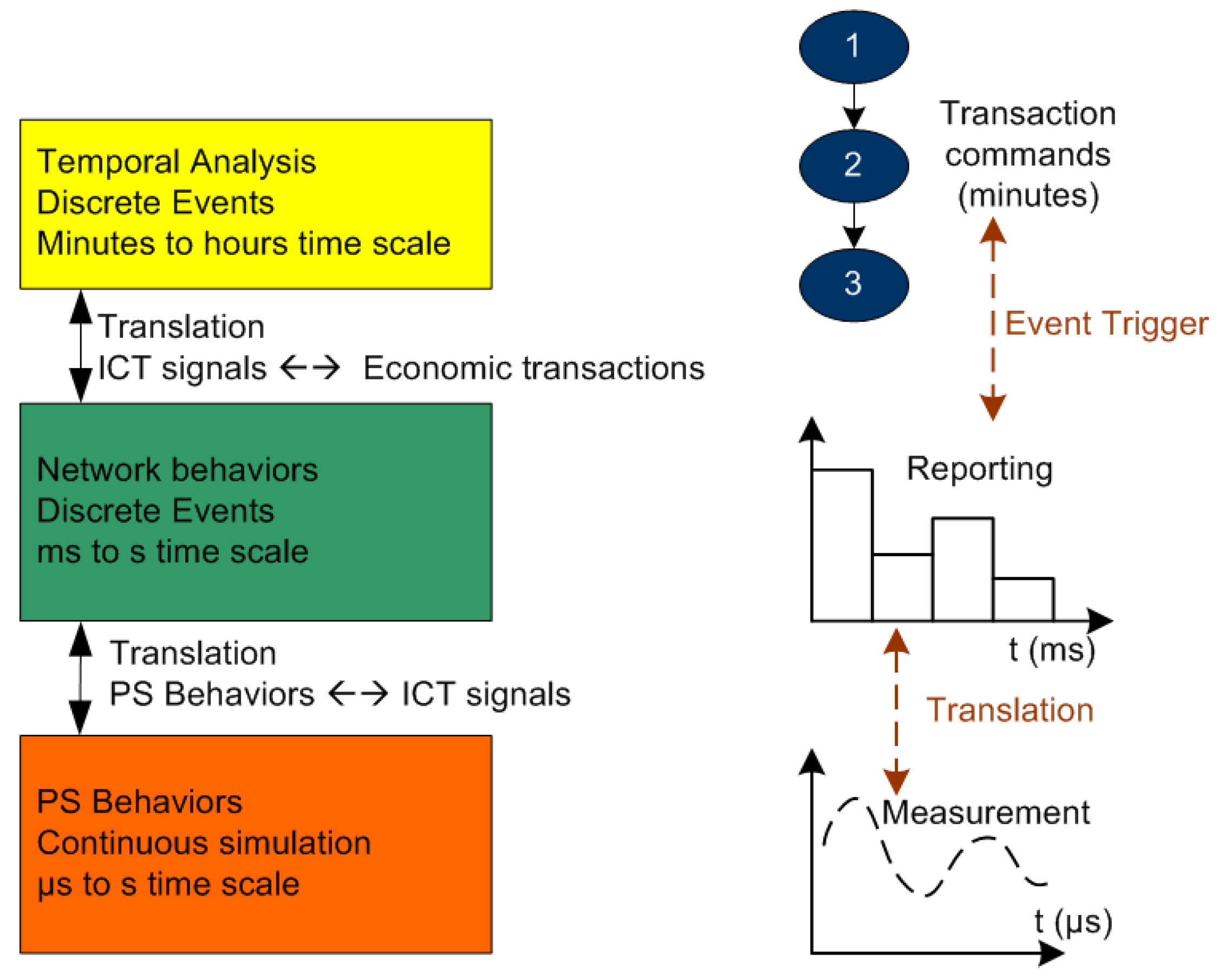
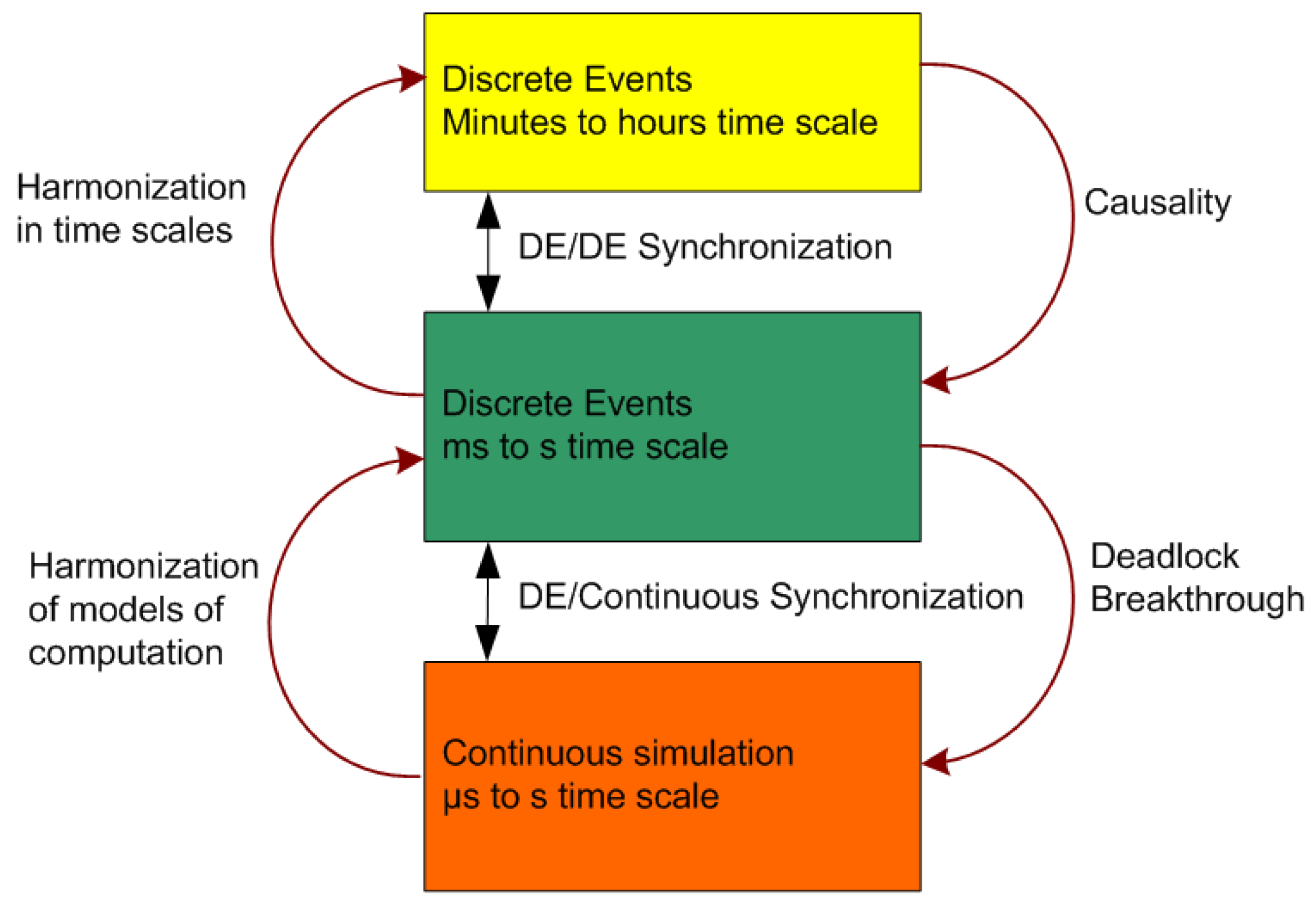
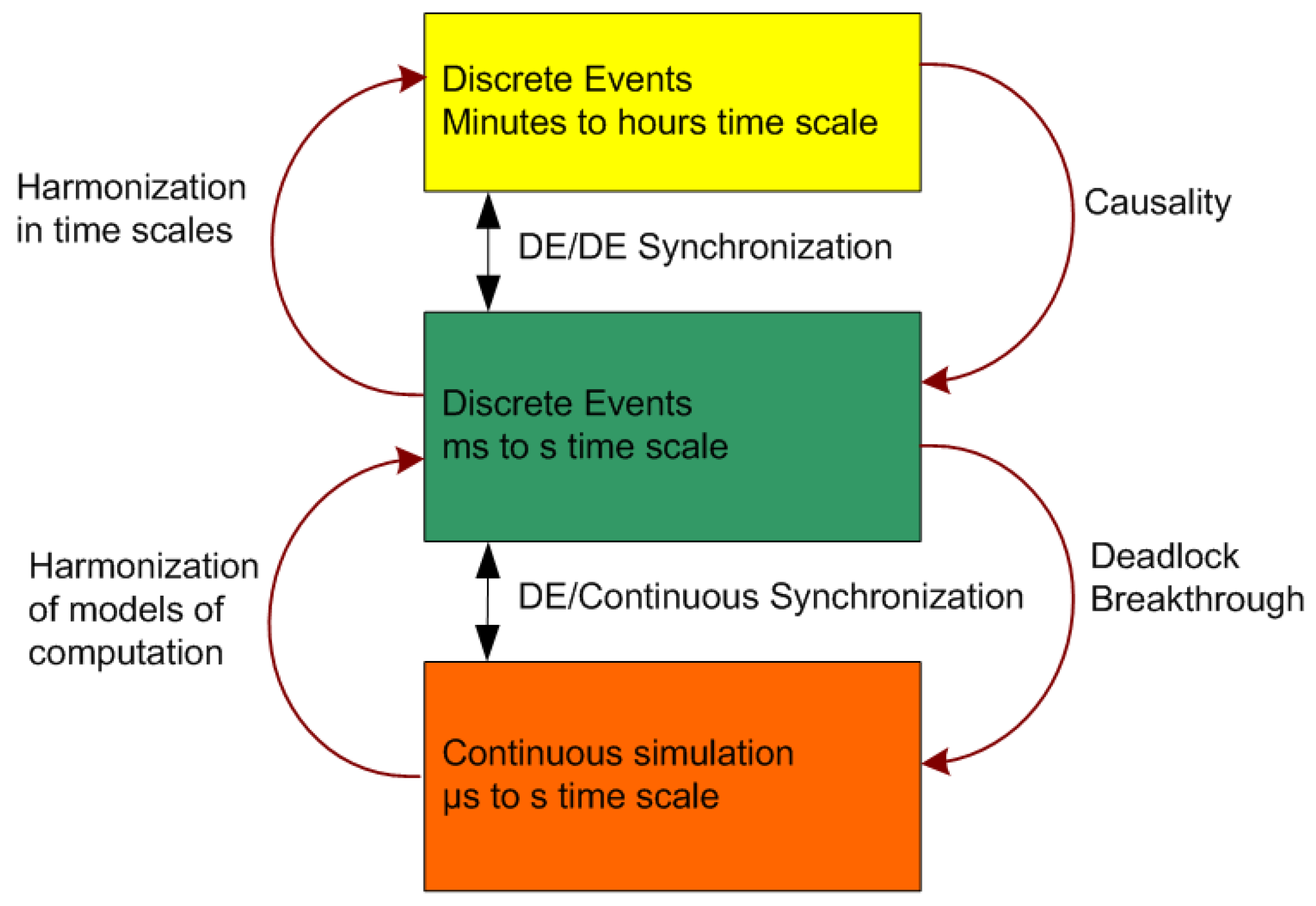
2.4. Dynamic Layer: Execution and Synchronization
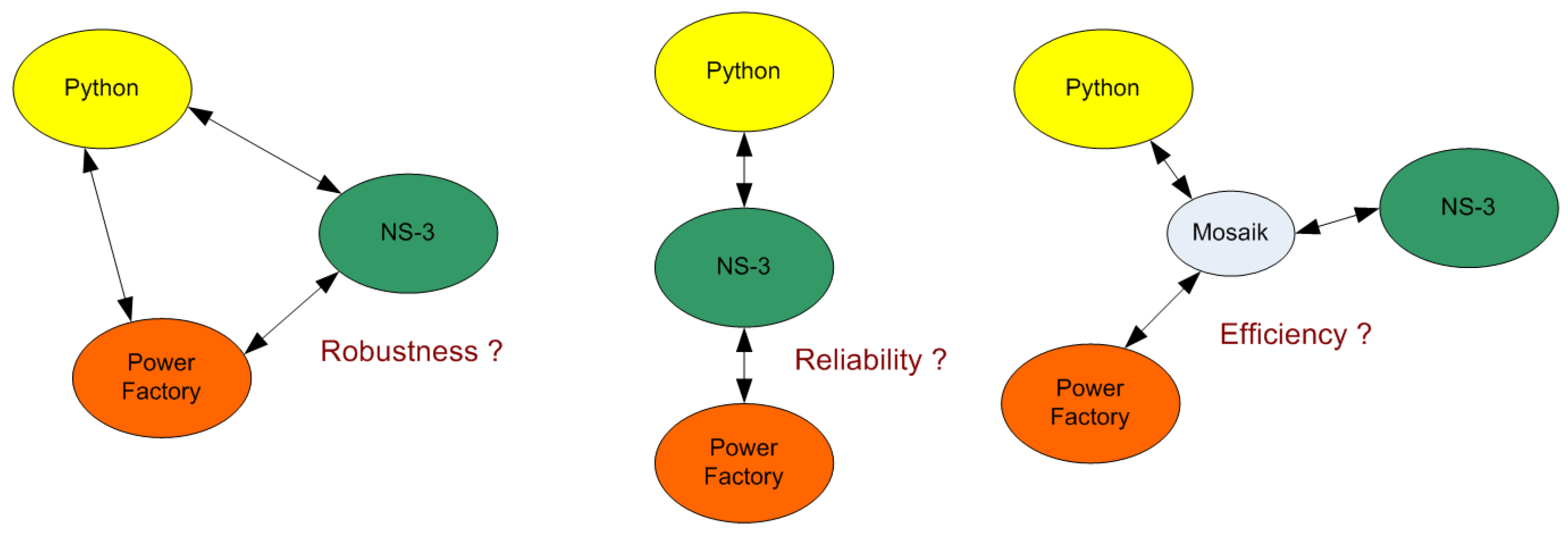
2.5. Technical Layer: Implementation and Evaluation
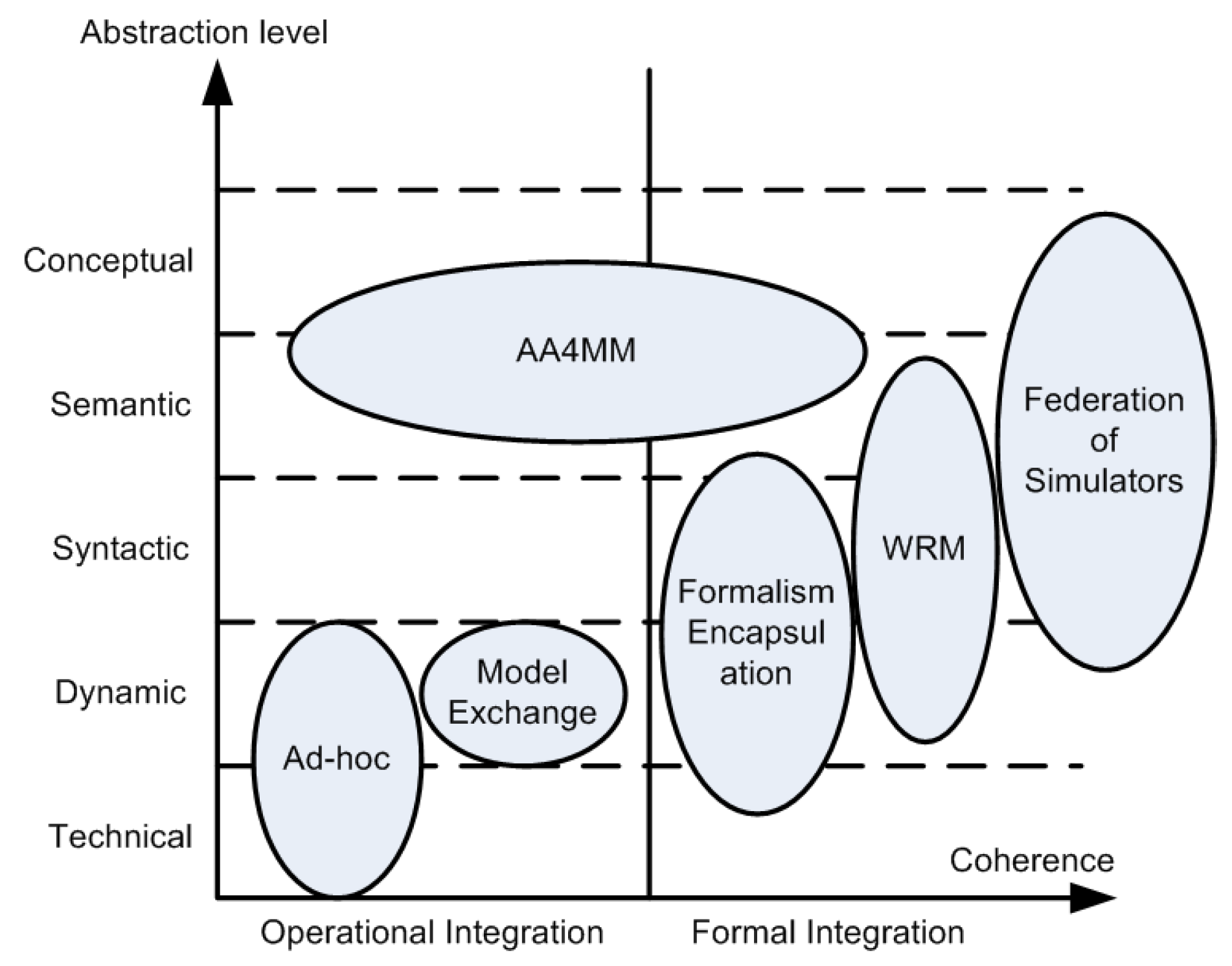
3. Review on Coupling Methods
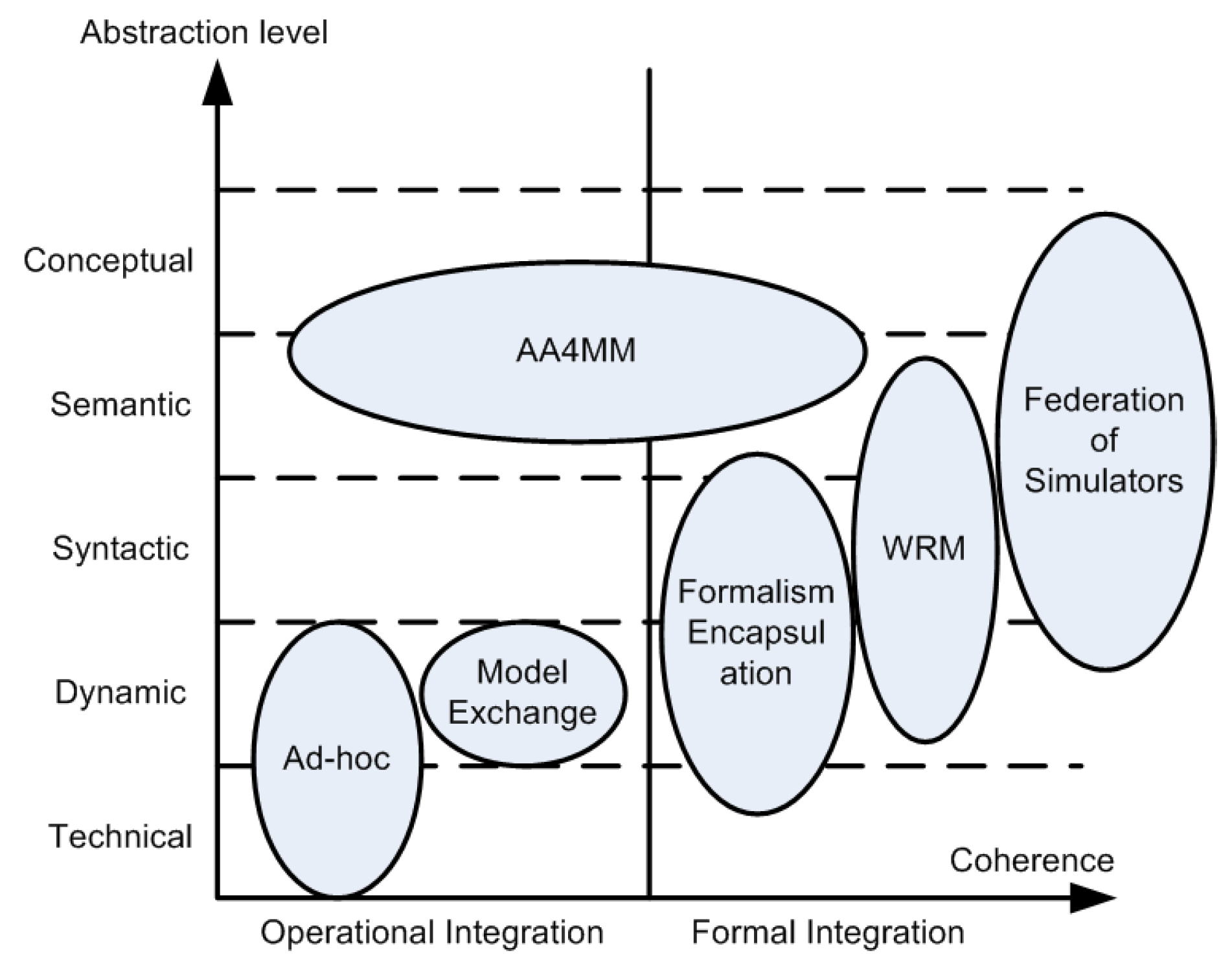
3.1. Operational Integration
3.1.1. Model Exchange—Functional Mock-up Interface
3.1.2. Ad-Hoc Coupling of Simulator
3.2. Formal Integration
- Implantation the elementary model into a more generic formalism. This requires however a lot of efforts and collaborations, especially in case of multi-domain experiments, where the behaviors of elements in one domain are not always evident to the experts of the other domain.
- Building and integrating an interface for translating from a particular formalism of a model to a more generic one.
- Simulator coupling handled and governed by an orchestrator.
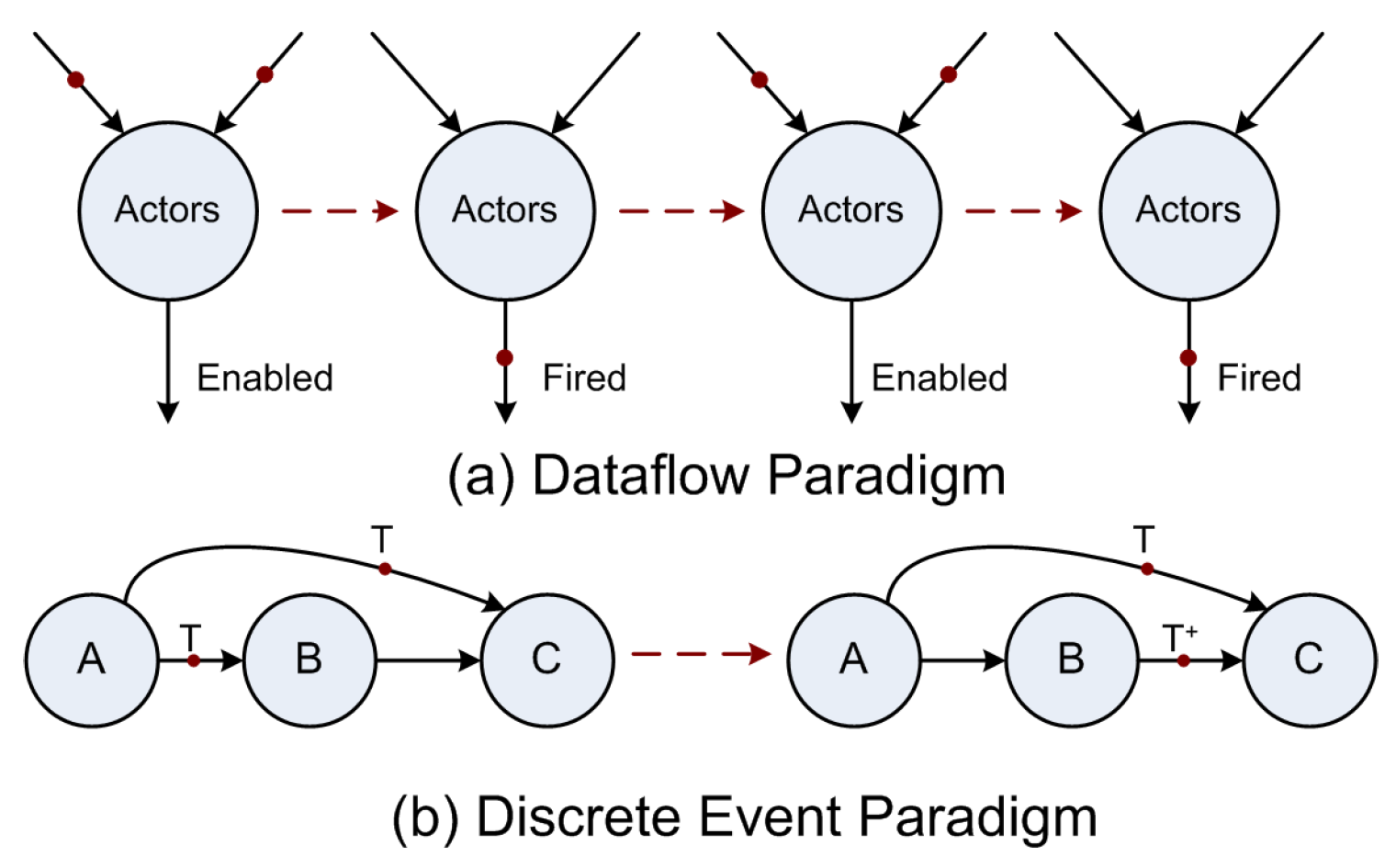
3.2.1. Encapsulation of Formalism—Discrete Event System Specification (DEVS)
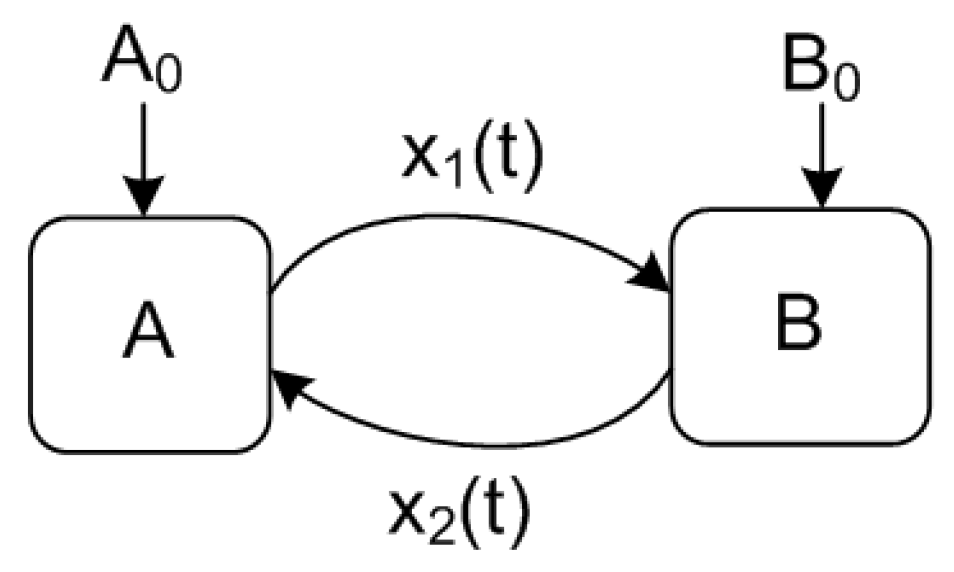
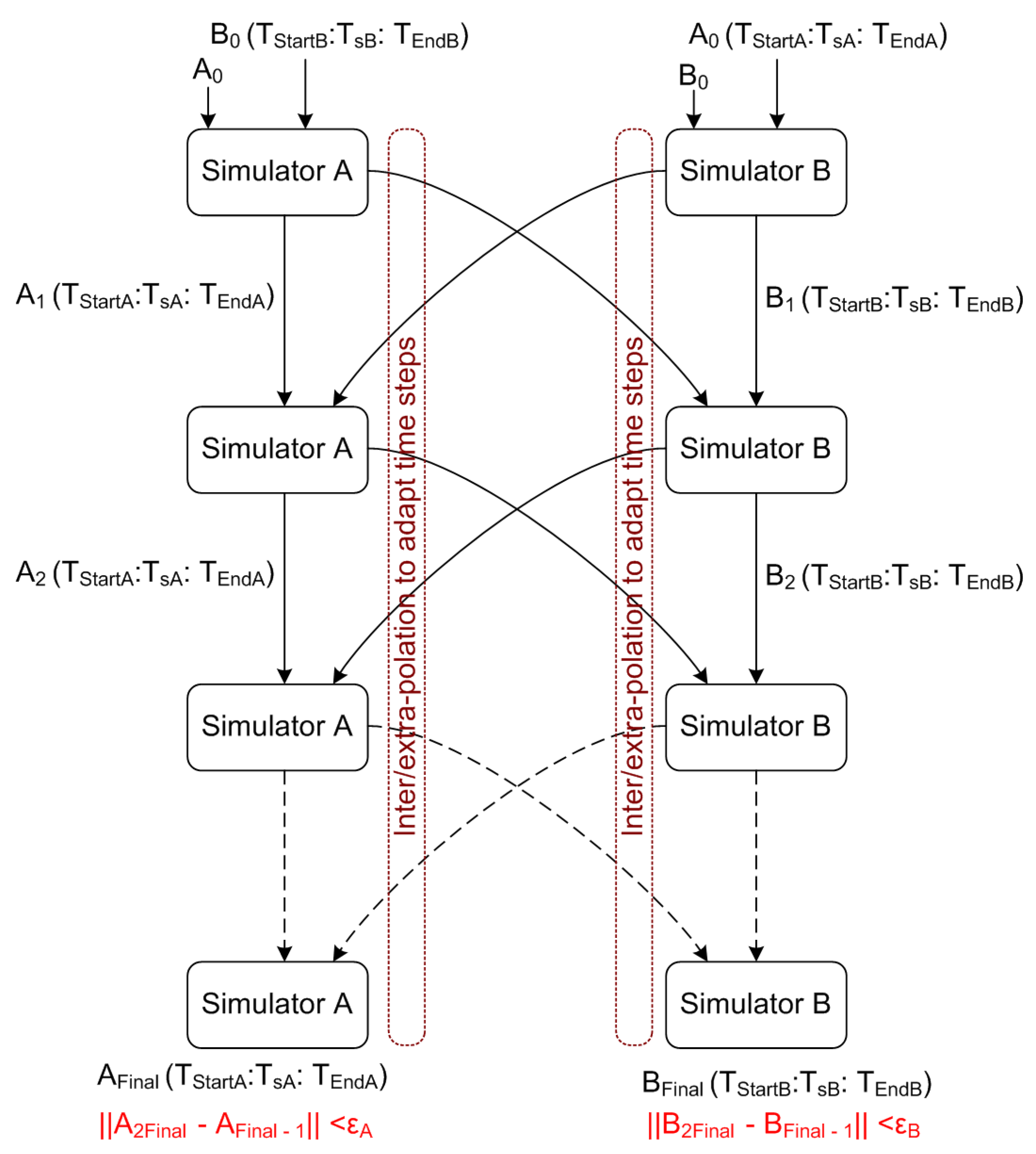
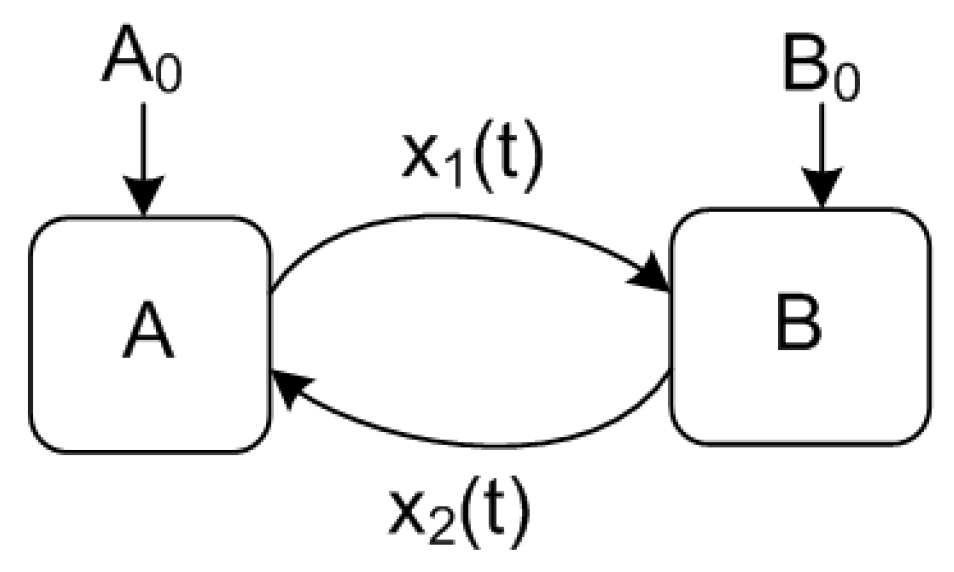
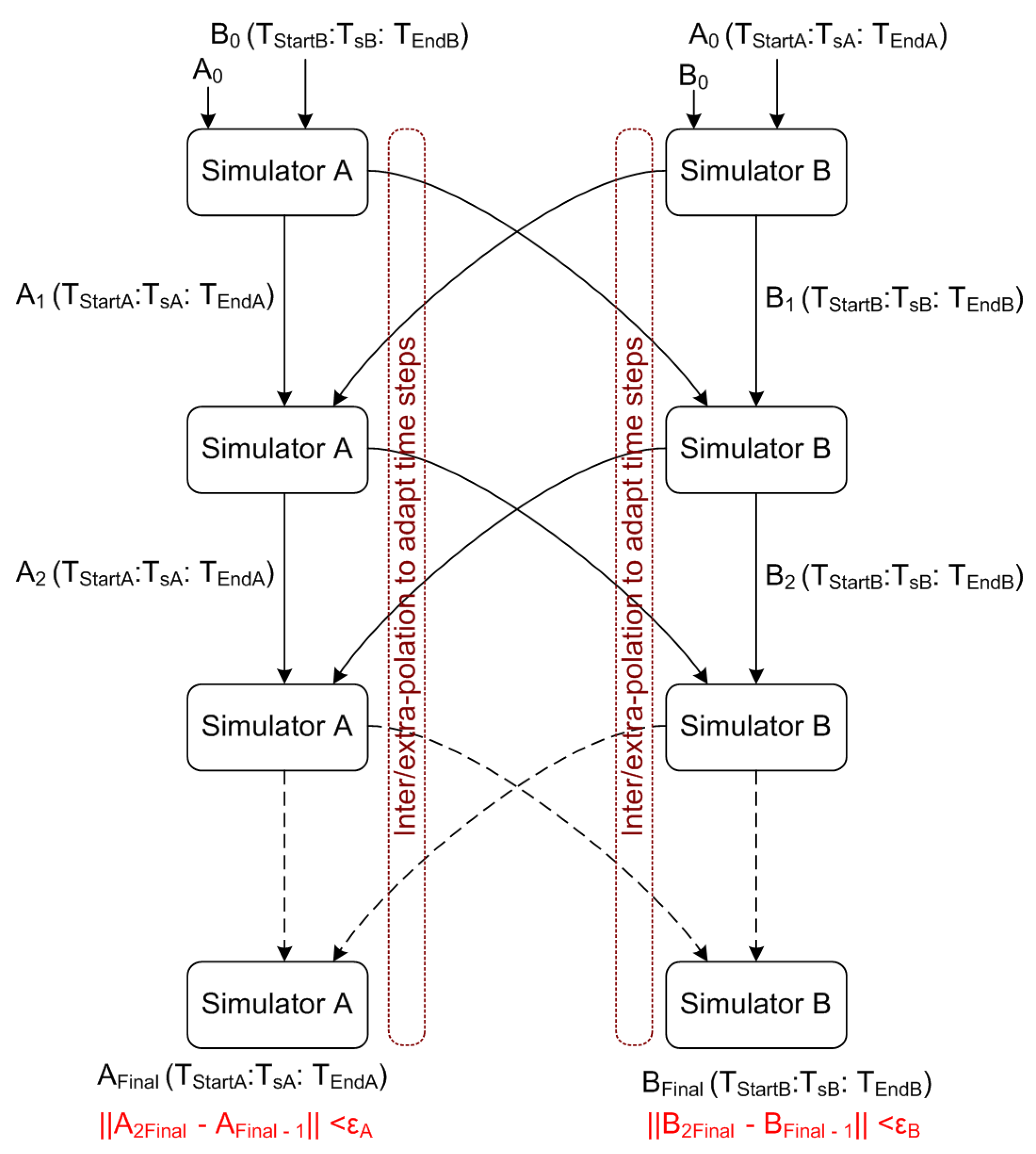
3.2.2. Waveform Relaxation Method
- in case of coupling models with asynchronous time steps, it is necessary to use an inter/extra-polation algorithm to harmonize the difference.
3.2.3. Federation of Simulation—Simulator Coupling with Orchestrator
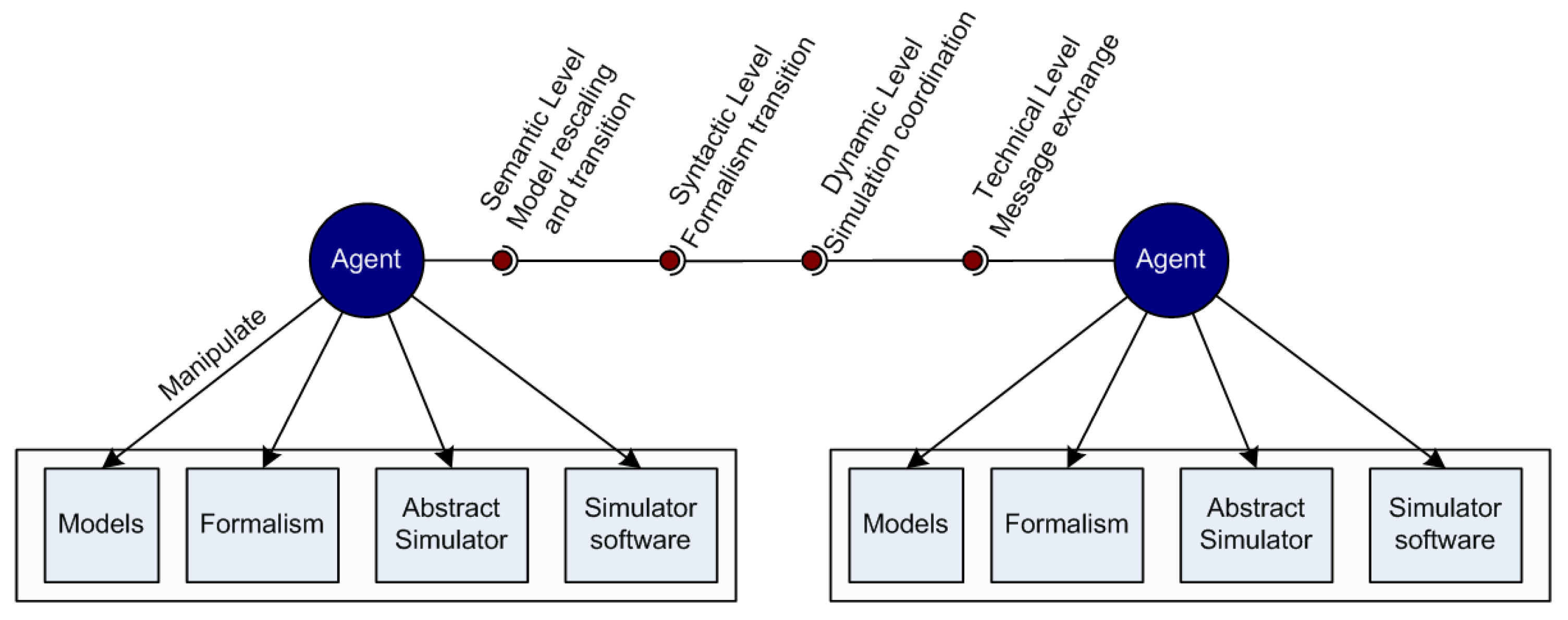
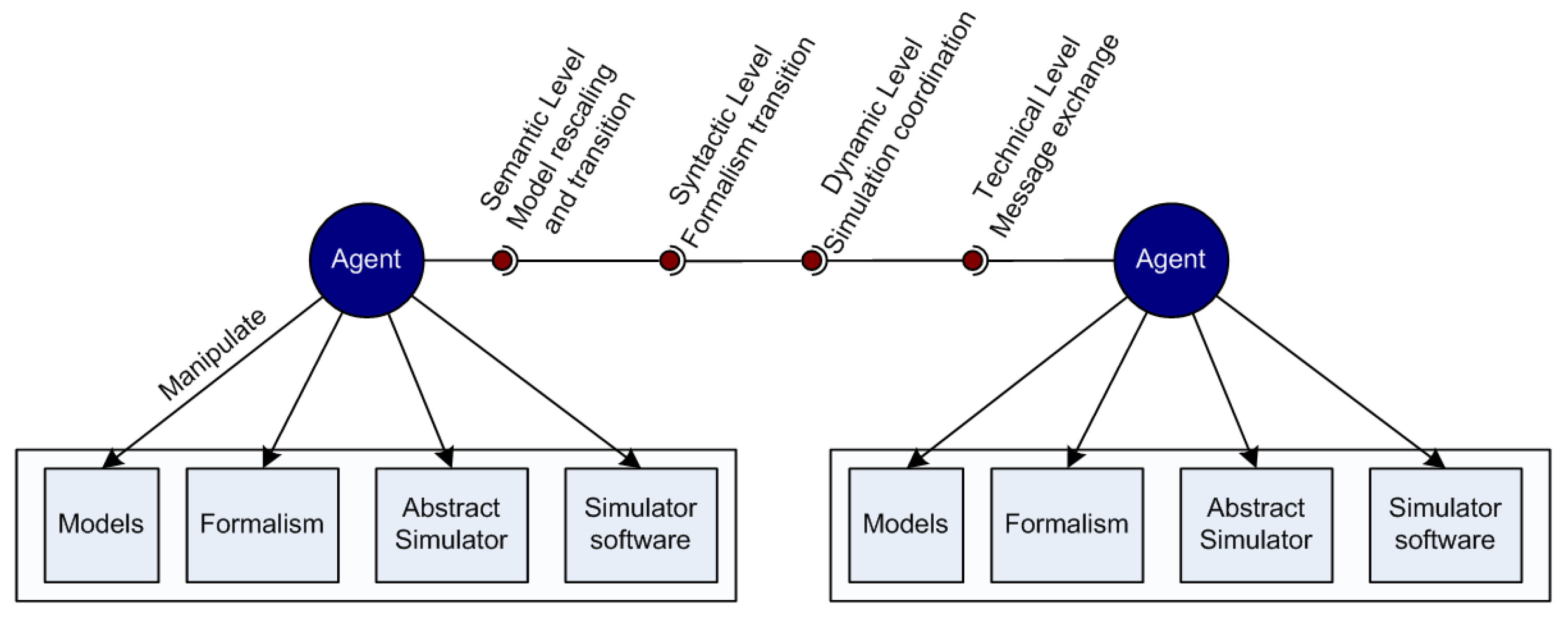
3.2.4. Multi-Agent Approach for Co-Simulation
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CHIL | Controller-Hardware-in-the-loop |
| CPES | Cyber-Physical Energy System |
| DAE | Differential Algebraic Equation |
| DEVS | Discrete Event System Specification |
| DRES | Distributed Renewable Energy Resources |
| DRTS | Digital Real-Time Simulation |
| ICT | Information and Communication Technologies |
| IEC | International Electrotechnical Commission |
| FMI | Functional Mock-up Interface |
| FMU | Functional Mock-up Unit |
| HIL | Hardware-in-the-loop |
| HLA | High Level Architecture |
| HUT | Hardware Under Test |
| ODE | Ordinary Differential Equation |
| OLE | Object Linking and Embedding |
| OPC | OLE for Process Control |
| OPC UA | OPC Unified Architecture |
| PDES | Parallel Discrete-Event Simulation |
| PHIL | Power-Hardware-in-the-loop |
| SCADA | Supervisory Control And Data Acquisition |
| WAMPAC | Wide Area Monitoring Protection And Control |
| WRM | Waveform Relaxation Method |
References
- International Energy Agency. Smart Grids in Distribution Network-Roadmap Development and Implementation; IEA: Paris, France, 2015. [Google Scholar]
- European Commission. Energy Roadmap 2050; Communication from the Commission to the European Parliament, the Council, the European Economic And Social Committee and the Committee of the Regions, Smart Grid Task Force; European Commission: Brussels, Belgium, 2011. [Google Scholar]
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2010, 8, 18–28. [Google Scholar] [CrossRef]
- Mets, K.; Ojea, J.A.; Develder, C. Combining Power and Communication Network Simulation for Cost-Effective Smart Grid Analysis. IEEE Commun. Surv. Tutor. 2014, 16, 1771–1796. [Google Scholar] [CrossRef]
- Palensky, P.; van der Meer, A.A.; López, C.D.; Jozeph, A.; Pan, K. Co-Simulation of Intelligent Power Systems—Fundamentals, software architecture, numerics, and coupling. IEEE Ind. Electron. Mag. 2017, 11, 34–50. [Google Scholar] [CrossRef]
- Strasser, T.; Andrén, F.P.; Lauss, G.; Bründlinger, R.; Brunner, H.; Moyo, C.; Seitl, C.; Rohjans, S.; Lehnhoff, S.; Palensky, P.; et al. Towards holistic power distribution system validation and testing—An overview and discussion of different possibilities. Elektrotech. Informationstech. 2017, 134, 71–77. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Besanger, Y.; Tran, Q.T.; Nguyen, T.L.; Boudinet, C.; Brandl, R.; Strasser, T. Using Power-Hardware-in-the-loop Experiments together with Co-simulation in a holistic approach for cyber physical energy system validation. In Proceedings of the IEEE PES International Conference on Innovative Smart Grid Technologies IEEE ISGT Europe 2017, Turin, Italy, 26–29 September 2017. [Google Scholar]
- Palensky, P.; van der Meer, A.A.; López, C.D.; Jozeph, A.; Pan, K. Applied co-simulation of intelligent power systems: Implementation, usage, examples. IEEE Ind. Electron. Mag. 2017, 11, 6–21. [Google Scholar] [CrossRef]
- Dang-Ha, T.H.; Olsson, R.; Wang, H. The Role of Big Data on Smart Grid Transition. In Proceedings of the IEEE International Conference on Smart City (SmartCity), Chengdu, China, 19–21 December 2015; pp. 33–39. [Google Scholar]
- Li, W.; Ferdowsi, M.; Stevic, M.; Monti, A.; Ponci, F. Co-simulation for smart grid communications. IEEE Trans. Ind. Inform. 2014, 10, 2374–2384. [Google Scholar] [CrossRef]
- Cintuglu, M.; Mohamed, O.; Akkaya, K.; Uluagac, A. A Survey on Smart Grid Cyber-Physical System Testbeds. IEEE Commun. Surv. Tutor. 2017, 19, 446–464. [Google Scholar] [CrossRef]
- Tolk, A.; Muguira, J. The levels of conceptual interoperability model. In Proceedings of the 2003 Fall Simulation Interoperability Workshop, Orlando, FL, USA, 14–19 September 2003. [Google Scholar]
- Cantot, P.; Igarza, J.L.; Luzeaux, D.; Rabeau, R. Simulation et ModéLisation des SystèMes de SystèMes-IC2 Traité Informatique et Systèmes d’Information; Hermes, Lavoisier: Paris, France, 2009. [Google Scholar]
- Siebert, J. Approche Multi-Agent pour la Multi-ModéLisation et le Couplage de Simulations. Application à L’éTude des Influences Entre le Fonctionnement des RéSeaux Ambiants et le Comportement de Leurs Utilisateurs. Ph.D. Thesis, Université Henri Poincaré—Nancy I, Nancy, France, 2011. [Google Scholar]
- Centre for Testing and Interoperability. TTCN-3 Tutorial; Technical Report; ESTI: Valbonne, France, 2013. [Google Scholar]
- International Electrotechnical Commission. TC IEC61850—Power Utility Automation; Technical Report; 57—Power System Management and Associated Information Exchange; IEC: Geneva, Switzerland, 2003. [Google Scholar]
- International Electrotechnical Commission. Energy Management System Application Program Interface (EMS-API)—Part 301: Common Information Model (CIM) Base; Technical Report; TC 57—Power System Management and Associated Information Exchange; IEC: Geneva, Switzerland, 2014. [Google Scholar]
- International Electrotechnical Commission. Application Integration at Electric Utilities—System Interfaces for Distribution Management—Part 11: Common Information Model (CIM) Extensions for Distribution; Technical Report; TC 57—Power System Management and Associated Information Exchange; IEC: Geneva, Switzerland, 2013. [Google Scholar]
- Electrical Power Research Institute. OPC Unified Architecture—Part 1: Overview and Concepts; Technical Report; TC 65/SC 65E–TR 62541-1:2010; Electrical Power Research Institute: Palo Alto, CA, USA, 2010. [Google Scholar]
- International Electrotechnical Commission. Application Integration at Electric Utilities—System Interfaces for Distribution Management—Part 14: Multispeak-CIM Harmonization; Technical Report; TC 57—Power System Management and Associated Information Exchange; IEC: Geneva, Switzerland, 2013. [Google Scholar]
- Gary, A.; Greg, R.; Gerald, R. MultiSpeak and IEC 61968 CIM: Moving Toward Interoperability. In Proceedings of the Grid-Interop Forum, Atlanta, GA, USA, 11–13 November 2008. [Google Scholar]
- Nguyen, V.H.; Besanger, Y.; Tran, Q.T. CIM and OPC UA for interoperability of micro-grid platforms. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference ISGT North America 2016, Minneapolis, MN, USA, 6–9 September 2016. [Google Scholar]
- Kostic, T.; Preiss, O.; Frei, C. Towards the formal integration of two upcoming standards: IEC 61970 and IEC 61850. In Proceedings of the Large Engineering Systems Conference on Power Engineering, Montreal, QC, Canada, 7–9 May 2003. [Google Scholar]
- Electrical Power Research Institute. Harmonizing the International Electrotechnical Commission Common Information Model (CIM) and 61850—Key to Achieve Smart Grid Interoperability Objectives; Technical Report; EPRI1020098; EPRI: Palo Alto, CA, USA, 2010. [Google Scholar]
- Rohjans, S.; Uslar, M.; Appekath, J. OPC UA and CIM: Semantics for the smart grid. In Proceedings of the IEEE PES Transmission and Distribution Conference and Exposition, New Orleans, LA, USA, 19–22 April 2010. [Google Scholar]
- Le, M.T.; Nguyen, V.H.; Besanger, Y.; Tran, Q.T. CIM compliant multiplatform approach for cyber-physical energy system assessment. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference ISGT Asia, Auckland, New Zealand, 4–7 December 2017. [Google Scholar]
- Michel, F. Formalisme, Outils et éLéMents MéThodologiques pour la Modélisation et la Simulation Multi-Agents. Ph.D. Thesis, Université des Sciences et Techniques du Languedoc, Montpellier, France, 2004. [Google Scholar]
- Chevrier, V.; Fates, N. How important are updating schemes in multi-agent systems? An illustration on a multi-turmite model. In Proceedings of the 9th International Conference on Autonomous Agents and MultiAgent System AAMAS 2010, Toronto, ON, Canada, 9–14 May 2010. [Google Scholar]
- Chang, W.T.; Ha, S.; Lee, E.A. Heterogeneous Simulation–Mixing Discrete-Event Models with Dataflow. J. VLSI Signal Process. 1997, 15, 127–144. [Google Scholar] [CrossRef]
- Kesaraju, V.; Ciarallo, F. Integrated simulation combining process-driven and event-driven models. J. Simul. 2012, 6, 9–20. [Google Scholar] [CrossRef]
- Banks, J.; Carson, I.I.; Nelson, B.L.; Nicol, D. Discrete Event System Simulation, 4th ed.; Prentice-Hall International: New York, NY, USA, 2005. [Google Scholar]
- Chandy, K.; Misra, J. Distributed Simulation: A case study in design and verification of distributed program. IEEE Trans. Softw. Eng. 1979, 24, 440–452. [Google Scholar] [CrossRef]
- Lubachevsky, B.; Shwartz, D.; Weiss, A. An analysis of rollback-based simulation. ACM Trans. Model. Comput. Simul. 1991, 1, 154–193. [Google Scholar] [CrossRef]
- Steinman, J. Breathing Time Warp. In Proceedings of the Seventh Workshop on Parallel and Distributed Simulation, San Diego, CA, USA, 16–19 May 1993. [Google Scholar]
- Nicol, D.; Liu, J. Composite synchronization in parallel discrete-event simulation. IEEE Trans. Parallel Distrib. Syst. 2002, 13, 433–446. [Google Scholar] [CrossRef]
- Jefferson, D. Virtual time. ACM Trans. Program. Lang. Syst. 1985, 7, 404–425. [Google Scholar] [CrossRef]
- Pongor, G. OMNET: Objective modular network testbed. In Proceedings of the MASCOTS93 International Workshop on Modeling, Analysis and Simulation on Computer and Telecommunication Systems, San Diego, CA, USA, 17–20 January 1993. [Google Scholar]
- Riley, G. The Georgie Tech Network Simulator. In Proceedings of the ACM SIGCOMM Workshop on Models, Methods and Tools for Reproductible Network Research, Bolton Landing, NY, USA, 19–22 October 2003. [Google Scholar]
- Awais, M.; Gawlik, W.; DeCillia, G.; Palensky, P. Hybrid Simulation using SAHISim Framework. In Proceedings of the 8th EAI International Conference on Simulation Tools and Techniques, Athens, Greece, 24–26 August 2015. [Google Scholar]
- Galtier, V.; Vialle, S.; Dad, C.; Tavella, J.P.; Lam, Y.M.; Plessis, G. FMI-based Distributed Multi-Simulation with DACCOSIM. In Proceedings of the Spring Simulation Multi-Conference, Alexandria, VA, USA, 12–15 April 2015. [Google Scholar]
- Widl, E.; Delinchant, B.; Kubler, S.; Li, D.; Muller, W.; Norrefeldt, V.; Nouidui, T.S.; Stratbucker, S.; Wetter, M.; Wurtz, F.; et al. Novel simulation concepts for buildings and community energy systems based on the Functional Mock-up Interface specification. In Proceedings of the Workshop on Modeling and Simulation of Cyber-Physical Energy Systems (MSCPES), Berlin, Germany, 14 April 2014. [Google Scholar]
- Nguyen, T.L.; Tran, Q.T.; Caire, R.; Besanger, Y.; Hoang, T.T.; Nguyen, V.H. FMI Compliant Approach to Investigate the Impact of Communication to Islanded Microgrid Secondary Control. In Proceedings of the IEEE PES International Conference on Innovative Smart Grid Technologies (ISGT Asia 2017), Auckland, New Zealand, 4–7 December 2017. [Google Scholar]
- Raad, A.; Reinbold, V.; Delinchant, B.; Wurtz, F. Energy building co-simulation based on the WRM algorithm for efficient simulation over FMU components of Web Service. In Proceedings of the BS’15 Building Simulation Conference, Hyderabad, India, 7–9 December 2015. [Google Scholar]
- Müller, S.C.; Georg, H.; Nutaro, J.J.; Widl, E.; Deng, Y.; Palensky, P.; Awais, M.U.; Chenine, M.; Kuch, M.; Stifter, M.; et al. Interfacing Power System and ICT Simulators: Challenges, State-of-the-Art and Case Studies. IEEE Trans. Smart Grid 2016, PP. [Google Scholar] [CrossRef]
- Lin, H.; Sambamoorthy, S.; Shukl, S.; Thorp, J.; Mili, L. A study of communication and power system infrastructure interdependence on PMU-based wide area monitoring and protection. In Proceedings of the Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Lin, H.; Veda, S.; Shukla, S.; Mili, L.; Throp, J. GECO: Global Event-Driven Co-Simulation Framework for Interconnected Power System and Communication Network. IEEE Trans. Smart Grid 2012, 3, 1444–1459. [Google Scholar] [CrossRef]
- Nutaro, J.; Kuruganti, P.; Miller, L.; Mullen, S.; Shankar, M. Integrated hybrid-simulation of electric power and communication systems. In Proceedings of the IEEE PES General Meeting 2007, Tampa, FL, USA, 24–28 June 2007. [Google Scholar]
- Li, W.; Monti, A.; Luo, M.; Dougal, R. VPNET: A co-simulation framework for analyzing communication channel effects on power systems. In Proceedings of the IEEE Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 143–149. [Google Scholar]
- Anderson, D.; Zhao, C.; Hauser, C.; Venkatasubramanian, V.; Bakken, D.; Bose, A. A virtual smart grid–real-time simulation for smart grid control and communication design. IEEE Power Energy Mag. 2012, 10, 49–57. [Google Scholar] [CrossRef]
- Liberatoire, V.; Al-Hammouri, A. Smart Grid Communication and Co-Simulation. In Proceedings of the IEEE Energytech, Cleveland, OH, USA, 25–26 May 2011; pp. 1–5. [Google Scholar]
- Bergmann, J.; Glomb, C.; Götz, J.; Heuer, J. Scalability of Smart Grid Protocols: Protocols and Their Simulative Evaluation for Massively Distributed DERs. In Proceedings of the 1st IEEE International Conference on Smart Grid Communication, Gaithersburg, MD, USA, 4–6 October 2010; pp. 131–136. [Google Scholar]
- Babazadeh, D.; Chemine, M.; Kun, M.; Al-Hammouri, A.; Nordstrom, L. A platform for Wide Area Monitoring and Control System ICT analysis and Development. In Proceedings of the IEEE PowerTech, Grenoble, France, 16–20 June 2013; pp. 1–7. [Google Scholar]
- Babazadeh, D.; Nordstrom, L. Angent-based control of VSC-HVDC Transmission Grid—A Cyber Physical System Perspective. In Proceedings of the IEEE MSCPES 2014, Berlin, Germany, 14 April 2014. [Google Scholar]
- Godfrey, T.; Mullen, S.; Dugan, R.; Rodine, C.; Griffith, D.; Golmie, N. Modeling smart grid applications with co-simulation. In Proceedings of the 1st IEEE International Conference on Smart Grid Communication, Gaithersburg, MD, USA, 4–6 October 2010; pp. 291–296. [Google Scholar]
- Mallouhi, M.; Al-Nashif, Y.; Cox, D.; Chadaga, T.; Hariri, S. A testbed for analyzing security of SCADA control systems (TASSCS). In Proceedings of the 2011 IEEE PES Innovative Smart Grid Technologies Conference, Anaheim, CA, USA, 17–19 January 2011. [Google Scholar]
- Wei, M.; Wang, W. Greenbench: A benchmark for observing power grid vulnerability under data-centric threats. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 2625–2633. [Google Scholar]
- Zeigler, B.; Praehofer, H.; Kim, T. Theory of Modeling and Simulation; Academic Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Himmelspach, J.; Uhrmacher, A. Plug’n Simulate. In Proceedings of the ANSS07 40th Annual Simulation Symposium, Norfolk, VA, USA, 26–28 March 2007. [Google Scholar]
- Himmelspach, J.; Rohl, M.; Uhrmacher, A. Component based models and simulation experiments for multi-agent systems in JAMES II. In Proceedings of the International Workshop on Agent Theory to Agent Implementation, Estoril, Portugal, 12–13 May 2008. [Google Scholar]
- Quesnel, G.; Duboz, R.; Ramat, E. The virtual laboratory environment—An operational framework for multi-modeling, simulation and analysis of complex dynamical systems. Simul. Model. Pract. Theory 2008, 17, 641–653. [Google Scholar] [CrossRef]
- Lelarasmee, E.; Ruehli, A.; Sangiovanni-Vincentelli, A. The Wave form Relaxation Method for Time-Domain Analysis of Large Scale Integrated Circuits; University of California: Oakland, CA, USA, 1982; Volume 1. [Google Scholar]
- White, J.; Vincentelli, A.; Odeh, F.; Ruehli, A. Waveform Relaxation: Theory and Practice. Trans. Soc. Comput. Simul. 1985, 2, 95–133. [Google Scholar]
- Crow, M.; Ilic, M. The waveform relaxation method for systems of differential/Algebraic Equations. Math. Comput. Model. 1994, 19, 67–84. [Google Scholar] [CrossRef]
- Sand, J.; Burrage, K. A Jacobi Waveform relaxation method for ODE. SIAM J. Sci. Comput. 1998, 20, 534–552. [Google Scholar] [CrossRef]
- Burrage, K.; Dyke, C.; Pohl, B. On the performance of parallel waveform relaxations for differential systems. Appl. Numer. Math. 1996, 20, 39–55. [Google Scholar] [CrossRef]
- Garrappa, R. An analysis of convergence for two-stage waveform relaxation methods. J. Comput. Appl. Math. 2004, 169, 377–392. [Google Scholar] [CrossRef]
- Sun, W.; Fan, W.G.; Wang, T. A discretized waveform relaxation method in flexible holonomic systems. In Proceedings of the 2014 International conference on Information Science, Electronics and Electrical Engineering, Sapporo, Japan, 26–28 April 2014. [Google Scholar]
- Liu, H.; Fu, Y.; Li, B. Discrete waveform relaxation method for linear fractional delay differential-algebraic equations. Discrete Dyn. Nat. Soc. 2017, 2017, 6306570. [Google Scholar] [CrossRef]
- Hout, K. On the convergence of waveform relaxation methods for stiff nonlinear ordinary differential equations. Appl. Numer. Math. 1995, 18, 175–190. [Google Scholar] [CrossRef]
- Bartoszewski, Z.; Kwapisz, M. On the convergence of waveform relaxation methods for differential-Functional System of Equations. J. Math. Anal. Appl. 1999, 235, 478–496. [Google Scholar] [CrossRef]
- Jiang, Y.L.; Wing, O. A note on convergence conditions of waveform relaxation algorithms for nonlinear differential-algebraic equations. Appl. Numer. Math. 2001, 36, 281–297. [Google Scholar] [CrossRef]
- Crisci, M.; Russo, E.; Vecchio, A. Discrete-time waveform relaxation Voltera-Runge-Kutta methods: Convergence analysis. J. Comput. Appl. Math. 1997, 86, 359–374. [Google Scholar] [CrossRef]
- Lee, E.; Zheng, H. Operational Semantics of Hybrid Systems. In Hybrid Systems: Computation and Control, Proceedings of the 8th International Workshop, HSCC 2005, Zurich, Switzerland, 9–11 March 2005; Springer Science Business Media: Berlin, Germany, 2005; pp. 25–53. [Google Scholar]
- Wetter, M. Co-simulation of building energy and control systems with the building controls virtual test bed. J. Build. Perform. Simul. 2011, 3, 185–203. [Google Scholar] [CrossRef]
- Chatzivasileiadis, S.; Bonvini, M.; Matanza, J.; Yin, R.; Liu, Z.; Nouidui, T.; Kara, E.; Parmar, R.; Lorenzetti, D.; Wetter, M.; et al. Cyber physical modeling of distributed resources for distribution system operations. Proc. IEEE 2015, 104, 789–806. [Google Scholar] [CrossRef]
- Georg, H.; Wietfeld, C.; Muller, S.; Rehtanz, C. A HLA based simulator architecture for co-simulating ICT based power system control and protection systems. In Proceedings of the 3rd Smart Grid communications (SmartGridComm), Tainan City, Taiwan, 5–8 November 2012. [Google Scholar]
- Galus, M.D.; Waraich, R.A.; Noembrini, F.; Steurs, K.; Georges, G.; Boulouchos, K.; Axhausen, K.W.; Andersson, G. Integrating Power systems, transport systems and Vehicle Technology for Electric Mobility Impact assessment and efficient control. IEEE Trans. Smart Grid 2012, 3, 934–949. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Modeling and Simulation (M & S) High Level Architecture (HLA)—Framework and Rules; Technical Report; IEEE SA-1516-2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Hemingway, G.; Neema, H.; Nine, H.; Sztipanovits, J.; Karsai, G. Rapid synthesis of high-level architecture-based heterogeneous simulation: A model-based integration approach. J. Simul. 2012, 88, 217–232. [Google Scholar] [CrossRef]
- Wang, X.; Turner, S.J.; Yoke Hean Low, M.; Gan, P.B. Optimistic Synchronization in HLA-Based Distributed Simulation. J. Simul. 2005, 81, 279–291. [Google Scholar] [CrossRef]
- Hopkinson, K.; Wang, X.; Giovanini, R.; Thorp, J.; Birman, K.; Coury, D. EPOCHS: A platform for Agent-Based Electric Power and Communication Simulation Built from Commercial Off-The-Shelf Components. IEEE Trans. Power Syst. 2006, 21, 548–558. [Google Scholar] [CrossRef]
- Georg, H.; Muller, S.; Rehtanz, C.; Wiefeld, C. Analyzing Cyber-Physical Energy Systems: The INSPIRE Co-Simulation of Power and ICT system using HLA. IEEE Trans. Ind. Inform. 2014, 10, 2364–2373. [Google Scholar] [CrossRef]
- Caire, R.; Sanchez, J.; Hadjsaid, N. Vulnerability analysis of coupled heterogeneous critical infrastructures: A Co-simulation approach with a testbed validation. In Proceedings of the IEEE ISGT Europe 2013, Lyngby, Denmark, 6–9 October 2013. [Google Scholar]
- Chatzivasileiadis, S.; Marco, B.; Javier, M.; Rongxin, Y.; Thierry, S.N.; Emre, C.K.; Rajiv, P. Cyber–Physical Modeling of Distributed Resources for Distribution System Operations. Proc. IEEE 2016, 104, 789–806. [Google Scholar] [CrossRef]
- Ricci, A.; Viroli, M.; Omicini, A. Give Agents their artifacts: The A & A approach for engineering working environments in MAS. In Proceedings of the AAMAS07 6th International Joint Conference on Autonomous Agents and Multi-Agent Systems, Honolulu, HI, USA, 14–18 May 2007. [Google Scholar]
- Omicini, A.; Ricci, A.; Viroli, M. Artifacts in the A & A meta-model for multi-agent systems. Auton. Agent Multi-Agent Syst. 2008, 17, 432–456. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Description | Associated Problems |
|---|---|---|
| Conceptual | Highest level where the models are considered as “black boxes” and the level concerns the co-simulation framework representation. | Generic structure of the framework; Meta-Modeling of the components. |
| Semantic | The level concerns the signification and the role of the co-simulation framework with respect to the open questions of the investigated CPES and studied phenomenon. | Signification of individual models; Interaction graph among the models; Signification of each interaction. |
| Syntactic | The level concerns the formalization of the co-simulation framework. | Formalization of individual models in the respective domains; Specification and handling the difference among the formalism. |
| Dynamic | The level concerns the execution of the co-simulation framework, the synchronization techniques and harmonization of different models of computation. | Order of execution and causality of models; Harmonization of different models of computation; Resolution for potential conflict in simultaneity of actions. |
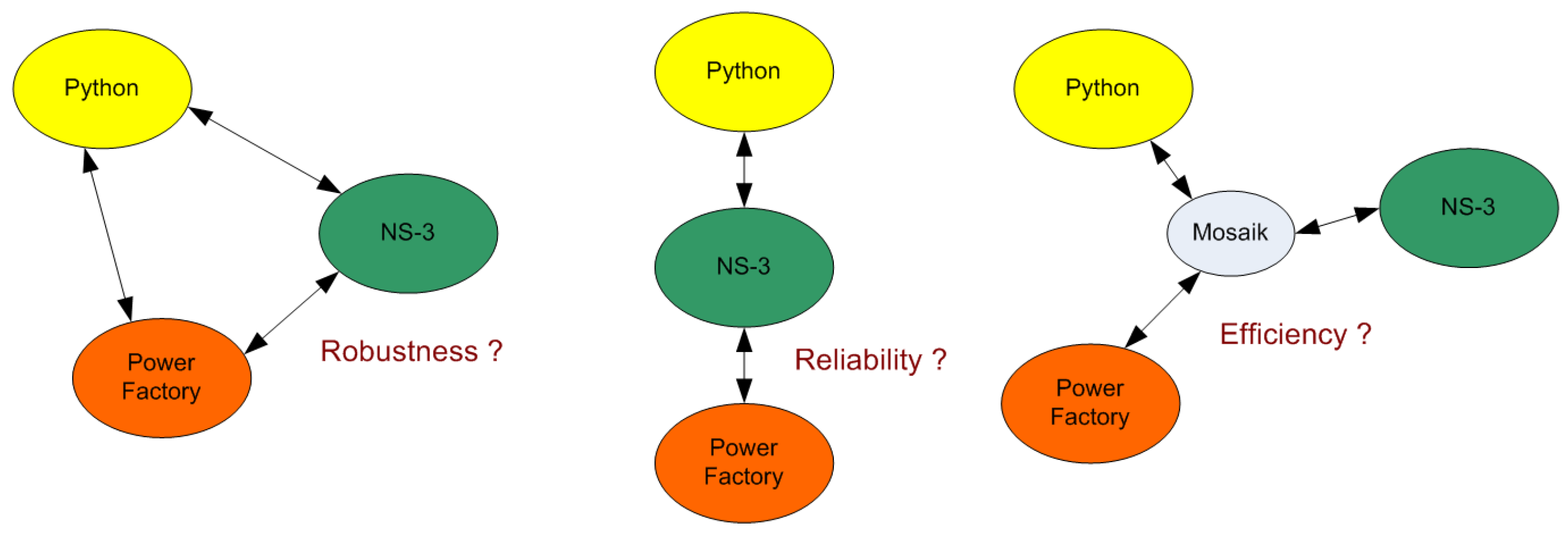
| Technical | The level concerns the implementation details and evaluation of simulation. | Distributed or centralized implementation; Robustness of the simulation; Reliability and efficiency of the simulation. |
| Co-Simulation Framework | Power System Simulator | Network Simulator | Synchronization Strateg | Applications | Time Scale |
|---|---|---|---|---|---|
| GECO [45,46] | PSLF | NS-2 | Global Event-Driven | PMU-based WAMPAC | ms to s |
| ADEVS [47] | ADEVS | NS-2 | DEVS | WAMPAC | ms to s |
| VPNET [48] | VTB | OPNET | Master-slave | WAMPAC | ms to s |
| GridSim [49] | PowerTech TSAT | GridStat | Time stepped | WAMPAC | ms to s |
| PowerNet [50] | Modelica | NS-2 | Master - Slave | Control | Unknown |
| Bergmann et al. [51] | NETOMAC | NS-2 | Time stepped | Evaluation of DERs | μs to ms |
| Babazadeh et al. [52,53] | RTlab | OPNET SITL | Asynchronous | WAMC, HVDC | μs to ms |
| Godfrey et al. [54] | OpenDSS | NS-2 | Unknown | DER Integration | ms to s |
| TASSCS [55] | PowerWorld | OPNET | Unknown | Cyber-security of SCADA | μs to ms |
| Greenbench [56] | PSCAD | OMNet++ | Global Event-Driven | Cyber-security LV Grid | ms to s |
| Co-Simulation Framework | Power System Simulator | Network Simulator | Master Algorithm | Applications | Time Scale |
|---|---|---|---|---|---|
| EPOCHS [81] | PSCAD/EMTDC,PSLF | NS-2 | HLA | Protection and Control | ms to minutes |
| INSPIRE [82] | PowerFactory | OPNET | HLA | WAMPAC | ms to minutes |
| SINARI [83] | PSCAD | NS-2 | JAVA | vulnerability analysis | ms to s |
| VIRGIL [84] | PowerFactory | OMNET++ | Ptolemy 2 | Control and optimization | ms to s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, V.H.; Besanger, Y.; Tran, Q.T.; Nguyen, T.L. On Conceptual Structuration and Coupling Methods of Co-Simulation Frameworks in Cyber-Physical Energy System Validation. Energies 2017, 10, 1977. https://doi.org/10.3390/en10121977
Nguyen VH, Besanger Y, Tran QT, Nguyen TL. On Conceptual Structuration and Coupling Methods of Co-Simulation Frameworks in Cyber-Physical Energy System Validation. Energies. 2017; 10(12):1977. https://doi.org/10.3390/en10121977
Chicago/Turabian StyleNguyen, Van Hoa, Yvon Besanger, Quoc Tuan Tran, and Tung Lam Nguyen. 2017. "On Conceptual Structuration and Coupling Methods of Co-Simulation Frameworks in Cyber-Physical Energy System Validation" Energies 10, no. 12: 1977. https://doi.org/10.3390/en10121977
APA StyleNguyen, V. H., Besanger, Y., Tran, Q. T., & Nguyen, T. L. (2017). On Conceptual Structuration and Coupling Methods of Co-Simulation Frameworks in Cyber-Physical Energy System Validation. Energies, 10(12), 1977. https://doi.org/10.3390/en10121977