2.1. Frequency-Dependent Characteristics of Traveling Wave
Current and voltage propagating in transmission lines are in the forms of electromagnetic waves. The wave equations are generally given as below:
U and
I are the phasor voltage and current values in frequency domain.
Z and
Y are the series impedance and parallel admittance matrix of the transmission line, respectively:
R,
L,
G,
C are the resistance, inductance, conduction and capacitance of transmission line, respectively. The Karrenbauer transform [
27] shown in Equation (3) is used to transform the coupled three phases to independent modes 0, 1, 2 where the mode 0 is the ground-mode and the modes of 1 and 2 are the aerial-modes in engineering [
9]. The transform is applicable for the current and voltage traveling waves.
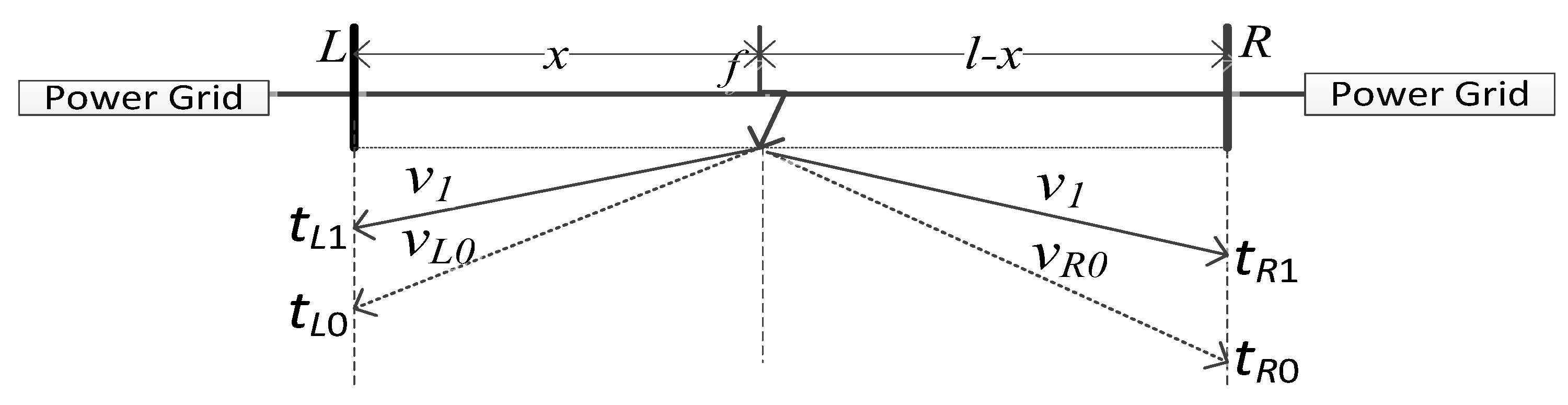
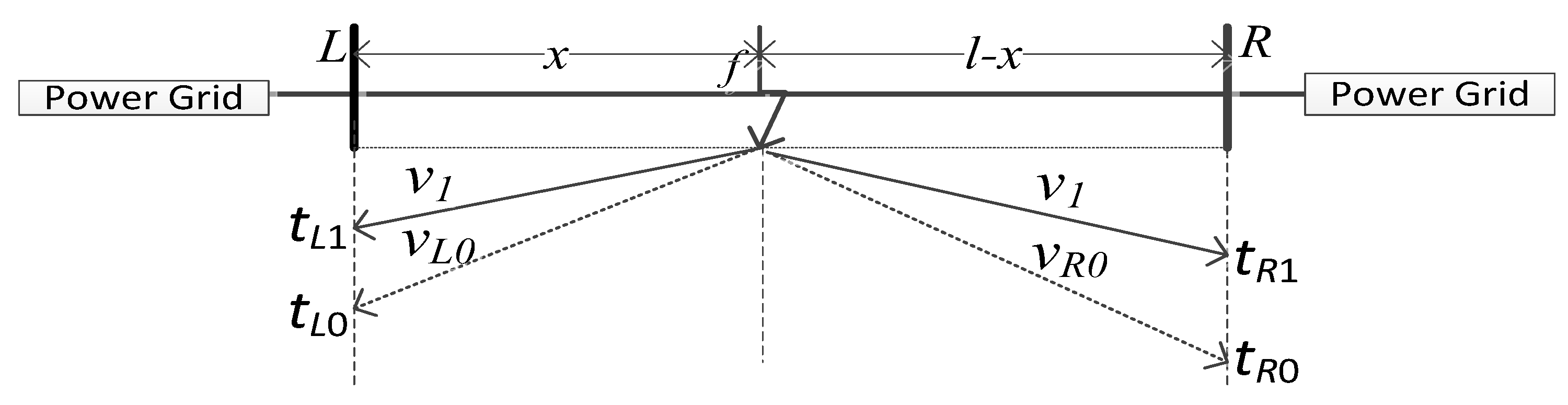
when a fault occurs in a transmission line, just like an equivalent reverse voltage step pulse applied at the fault point, which is equal to the pre-fault phase voltage. The step pulse is a band-width signal, including a broad frequency band from Hz to MHz. Thus, the transient traveling waves of the current and voltage are produced and propagated to both sides of the line as shown in
Figure 1.
Equation (1) shows the propagation of traveling waves in the frequency domain, which can be transformed into the time domain as in Equation (4). The traveling waves of the current and voltage signals have the similar expressions.
where
α(
ω) is the attenuation factors and
β(
ω) is the phase distortion factors of line. The propagation coefficient of line is defined as
.
Equation (4) shows that a traveling wave consists of a forward wave and a backward wave. The traveling wave attenuates exponentially with distance. The propagation coefficient plays an important role in the propagation of the traveling wave.
For any line, the propagation coefficient of each mode is decided by the line parameters. As shown in Equation (5),
m = 0 is the ground-mode and
m = 1, 2 is the aerial-mode.
The terms Rm(ω), Lm(ω), Gm(ω) and Cm(ω) are the resistance, inductance, conductance and capacitance of transmission lines, respectively. Considering the frequency dependent characteristic of the lines, these parameters are the frequency-dependent. Among them, the Rm() and Lm(ω) change more obviously with frequency comparing to Gm(ω) and Cm(ω). The and in frequency domain are expressed in Equations (6) and (7).
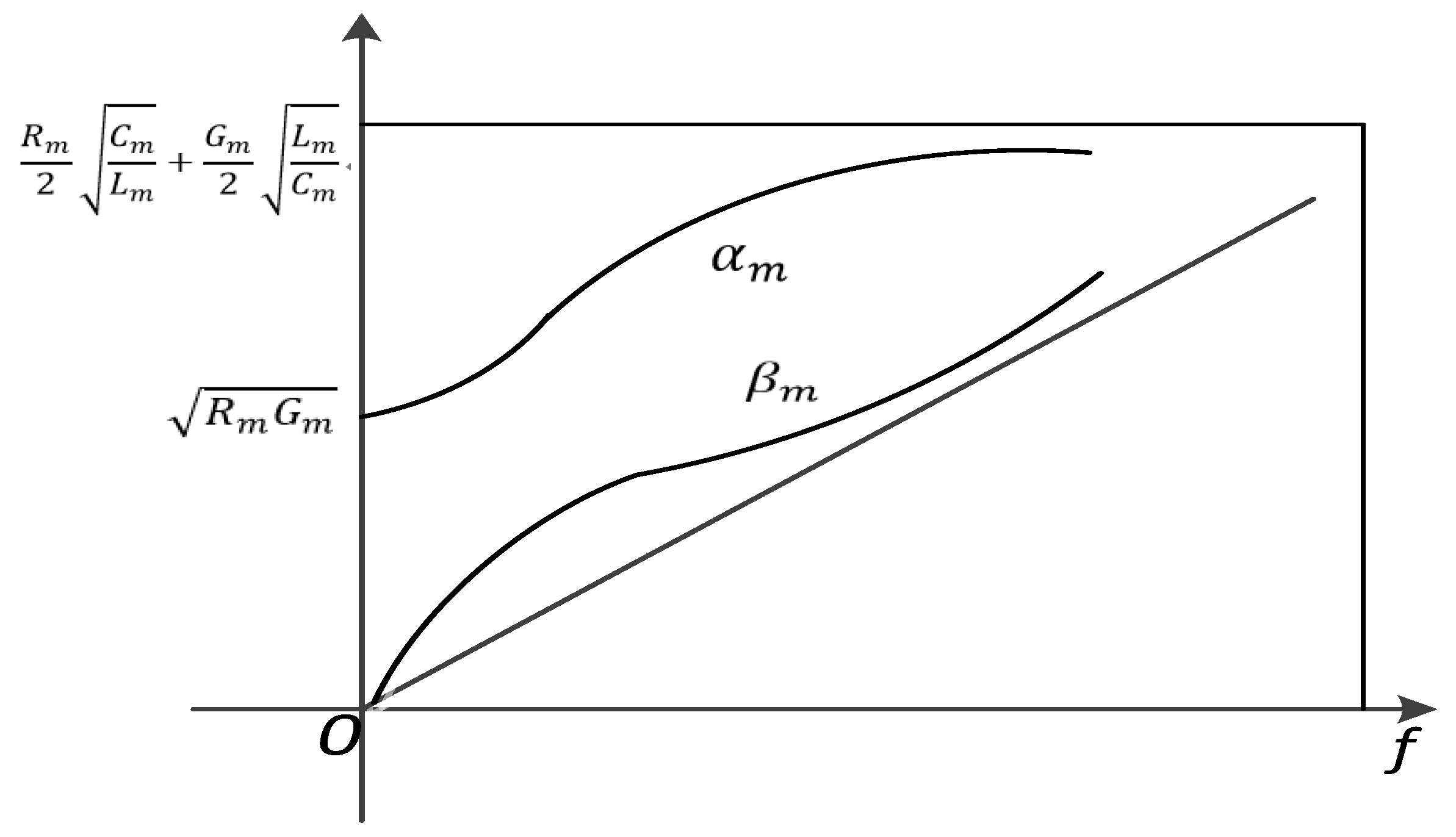
According to Equations (6) and (7),
Figure 2 gives the characteristics of curves
,
in frequency. For
, it is in proportion to the frequency. Due to the different propagation path,
is greater than
,
. The reason is that the impendence of earth is higher than the lines. The attenuation factor of aerial-mode is relatively small and changeless, and that of ground-mode is great and frequency-dependent in comparison:
Ignoring the attenuation factors, the traveling waves propagate along in the transmission lines with a certain speed, which is:
According to the Equations (7) and (8), the relationship curve of velocities and frequencies is shown in
Figure 3 which indicates that the ground-mode velocity is approximately linear with respect to frequency and the aerial-mode velocity is constant at high frequency (above 1 kHz). Different frequency signals have different speeds for ground-mode traveling waves. The measuring velocity of traveling wave depends on the highest frequency signal which can be detected.
As analyzed above, the velocity of traveling wave is vital for many fault location algorithms. When a fault occurs, the transient TWs contain high frequency signals. If there are no attenuation factors, the velocity of traveling wave is equal to the speed of the light. As signals with different frequencies have different attenuation factors and velocities, some high frequency signals are immeasurable at measuring points and the measuring velocity of a fault-traveling wave is uncertain within different fault distances.
2.2. The Change of Traveling Wave Velocity with Fault Distance
Equation (8) gives the expression of velocity that does not take the attenuation factor into account. The attenuation factor plays an important role in measuring velocities at measuring points. Equation (4) illustrates that the amplitude of traveling wave attenuates exponentially. The amplitude of first detected transient traveling wave head can be seen as the amplitude superimposition of the highest frequency signals in one sampling interval:
where
fi(
t) is the amplitude of the component in traveling waves with frequency
i and
A is the detected amplitude of traveling wave head at a measuring point.
As shown in
Figure 1, supposing the amplitude of measured traveling wave at
x1 is A
1, the amplitude of measured traveling wave at
x2 is A
2 and sampling time is ∆
t. The highest frequency signal components combined with A
1 have the strongest attenuation when travelling toward
x2. As a result, some of those frequencies are attenuated severely and the traveling wave fault location equipment cannot be triggered. Then, the measured signals of
x2 are composed of subsequent lower frequency signals. The dominant frequency of
x2 is lower than that of
x1. According to
Figure 3, the velocity of traveling wave at
x2 is smaller than that of
x1. The initial traveling wave is a pulse signal with continuous frequency spectrum. The attenuations of the traveling wave in different frequencies have exponential decay characteristics and the velocity is approximately linear with respect to the frequency. The variation tendency of traveling wave velocity affected by fault distance can be described as a monotonic function.
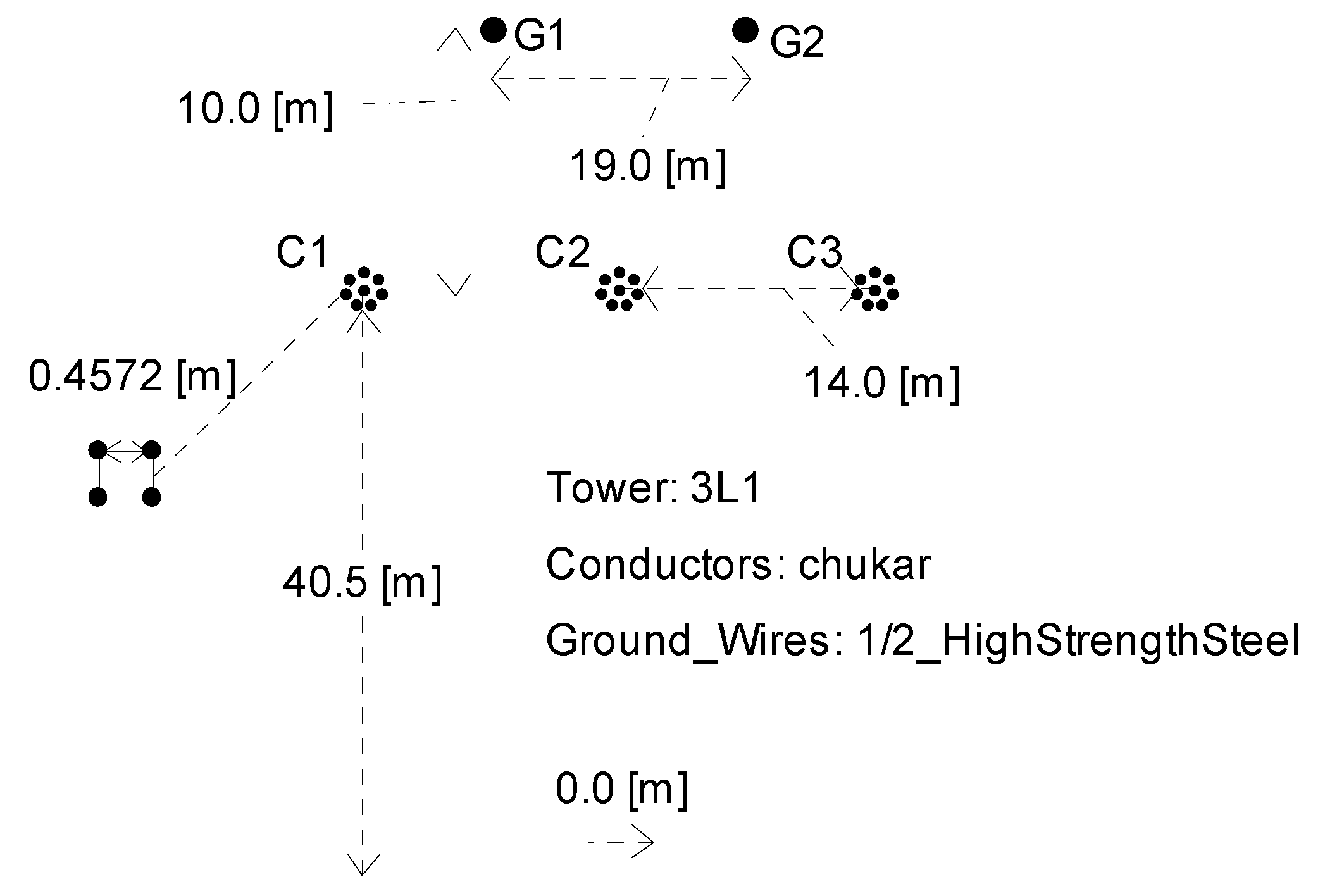
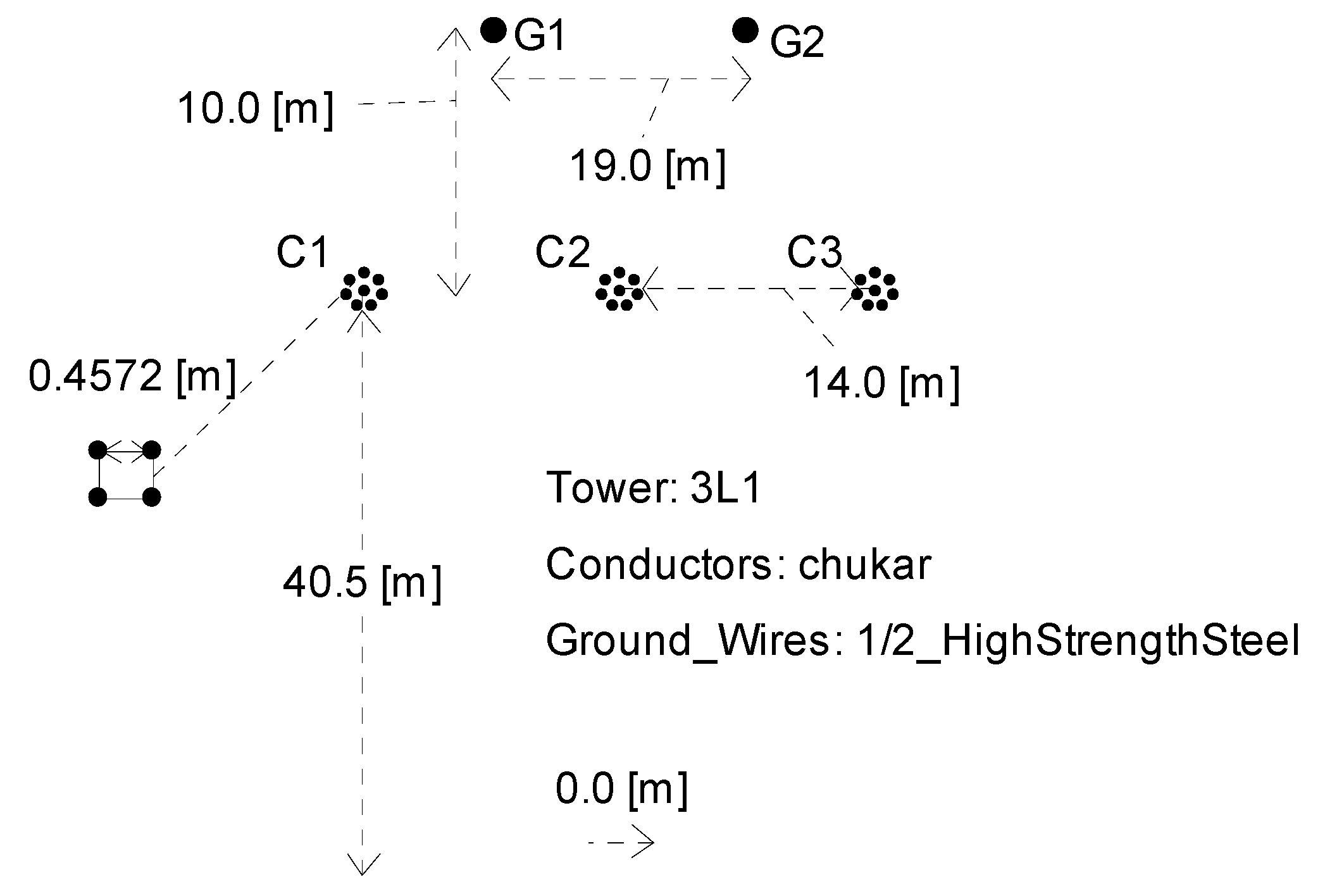
Based on
Figure 1, the LGJ-240/30 line has been used for verifying the assumption. The length of the line is 500 km.
Figure 4 shows the tendency of ground-mode velocity and aerial-mode velocity.
The attenuation factors are different with the different propagation paths. The ground-mode traveling wave has relatively higher factors of decay. The change of ground-mode velocity is more dramatic than that of the aerial-mode. Without loss of generality, the velocity of ground-mode can be seen as a constant factor which is changed slightly in a finite length line. The ground-mode velocity shows an obviously monotonic descent with the increase of the fault distance. It is inappropriate to take the ground-mode velocity as a known quantity with the unknown fault distance. A monotonic function of ground-mode velocity can benefit the fault location results.
In order to fit the relationship between the ground-mode wave velocity and fault distance, fault simulations and calculations are carried out in the following steps: (1) 14 measurement points denoted as
M1,
M2,
…,
M14 are installed along the line with the distances
l1,
l2,
…,
l14 from the local terminal respectively; (2) a fault is simulated at the local terminal of the line at
t0; (3) the ground-mode traveling wave signal acquired at each measurement point is analyzed by wavelet transform and the corresponding arrival time stamp
ti is extracted based on wavelet modulus maximum; (4) the ground-mode velocity of each location where the measurement point is mounted can be calculated according to the following equation:
(5) The exponential function, logarithmic function and quadratic function are used to fit the relationship between
v0 and
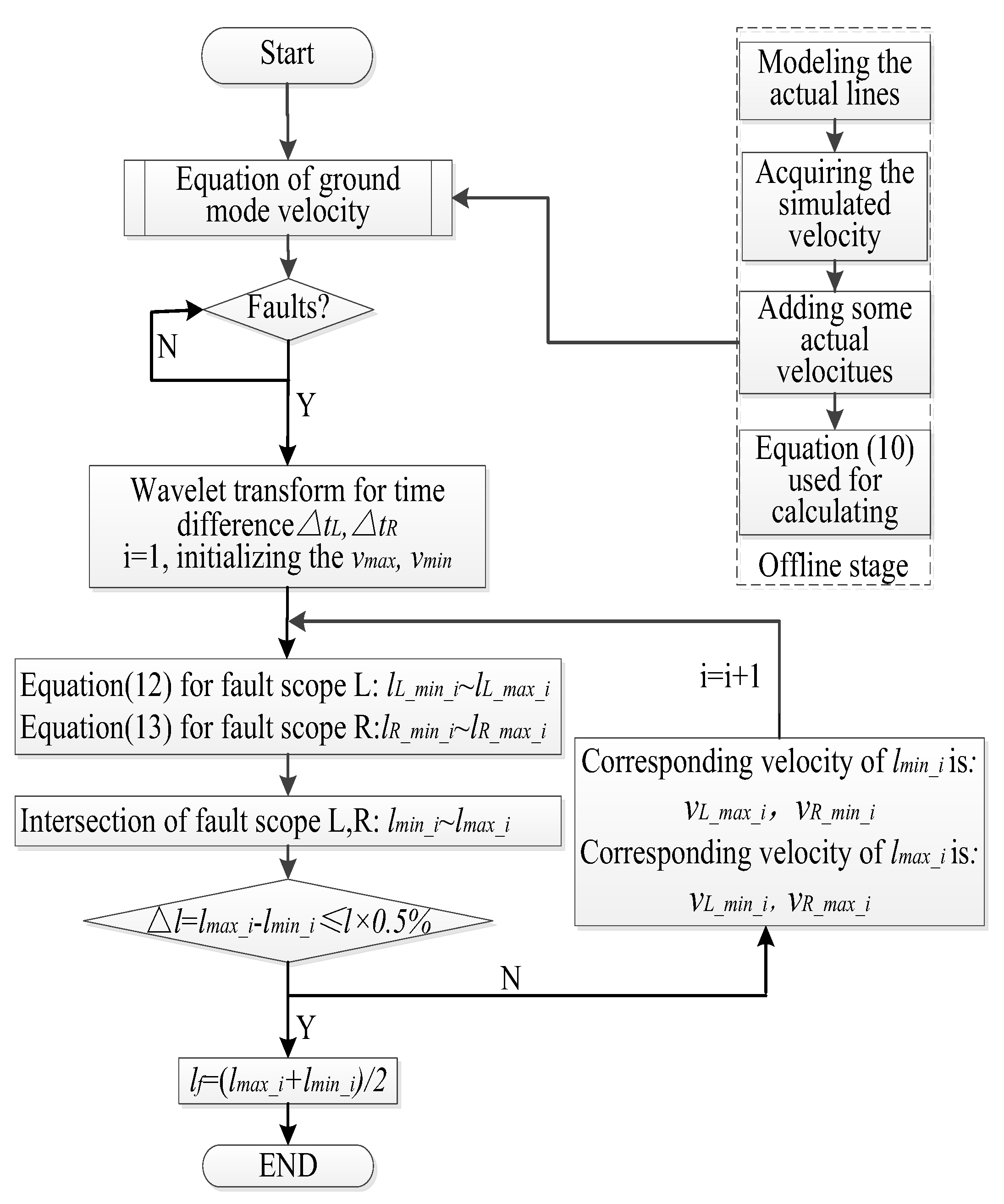
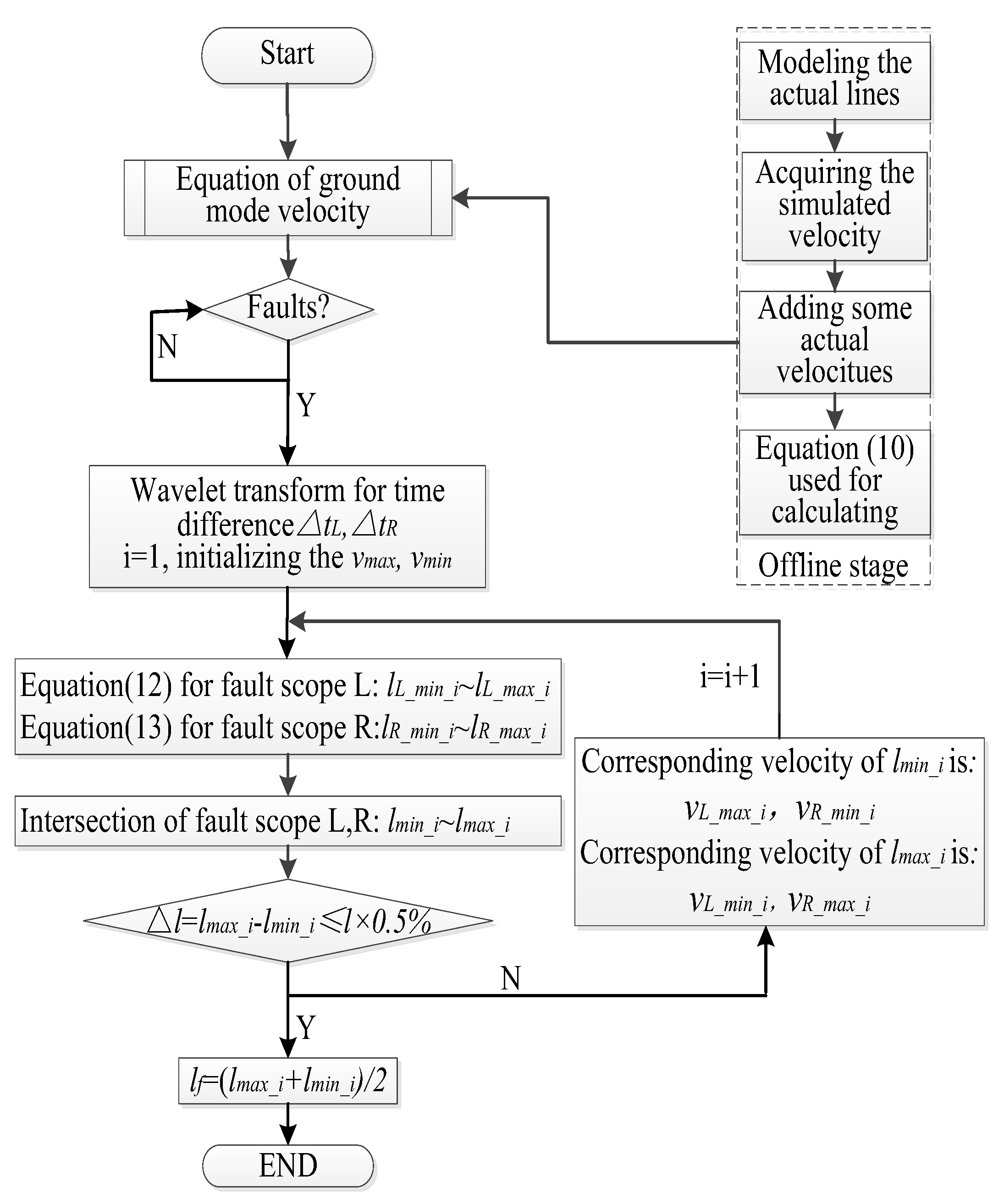
lx. The flowchart of the above steps are illustrated in
Figure 5.
From the above steps, it should be noted that it is of great essence to determine the arrival time stamps by wavelet transform, the details of which are shown as follows:
First, the initial traveling wave signal to be analyzed was imported in Matlab Wavelet Tookit. Next, the signal was decomposed into four levels by a Daubechies 6 wavelet. Then, the detailed and approximate coefficients were exported. Finally, the modulus maximum value of detailed coefficients of d1 level was calculated to identify the arrival time stamp of the traveling wave.
The numerical results of
Figure 6 are shown in the following
Table 1. Three-phase current signals can be transformed into aerial-mode and ground-mode by Karrenbauer transform shown in Equation (3). The arrival time of ground-mode current traveling wave is computed based on Wavelet transform modulus maximum. At last, the ground-mode velocity can be calculated by Equation (10).
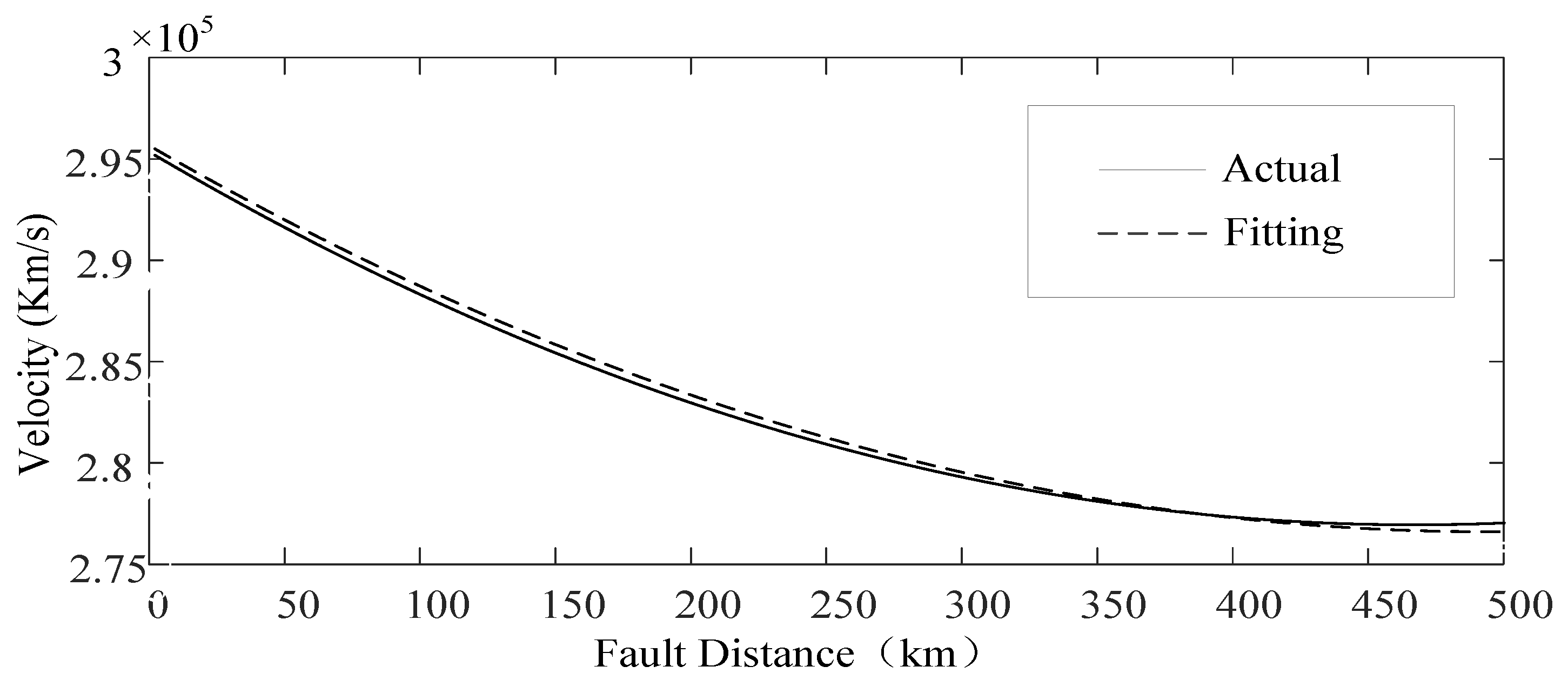
As previously analyzed, the initial traveling wave with sufficiently high frequencies has higher attenuation factor, which causes a stronger change of velocity than that from a further distance. The trend of measured velocity is that the closer to the fault point the faster the changes. Therefore, an exponential function, logarithmic function and quadratic polynomial function with the above tendency have been used for the velocity fitting. The result is shown in
Figure 5. The fitting functions and the goodness of fit (
R2) are:
Exponential function: , ;
Logarithmic function: , ;
Quadratic function: , ;
Using this method, MATLAB (MathWorks, Natick, MA, USA) program fits different lines with different lengths. The goodness of fit
R2 is given in
Table 2.
From
Table 2, we can see that each selected function can fit the tendency of the ground-mode velocity. However, the quadratic function fits better than the others and performs better in calculating the velocity along the transmission lines. Thus, the quadratic function is used for describing the relation between the ground-mode velocity and the fault distance.
Based on the above analysis, for any transmission line, the general quadratic function about the ground-mode velocity and the fault distance is defined as below:
A, B, C are the unknown coefficients determined by the lines; x is the fault distance from measured points; v0 is the corresponding ground-mode velocity.
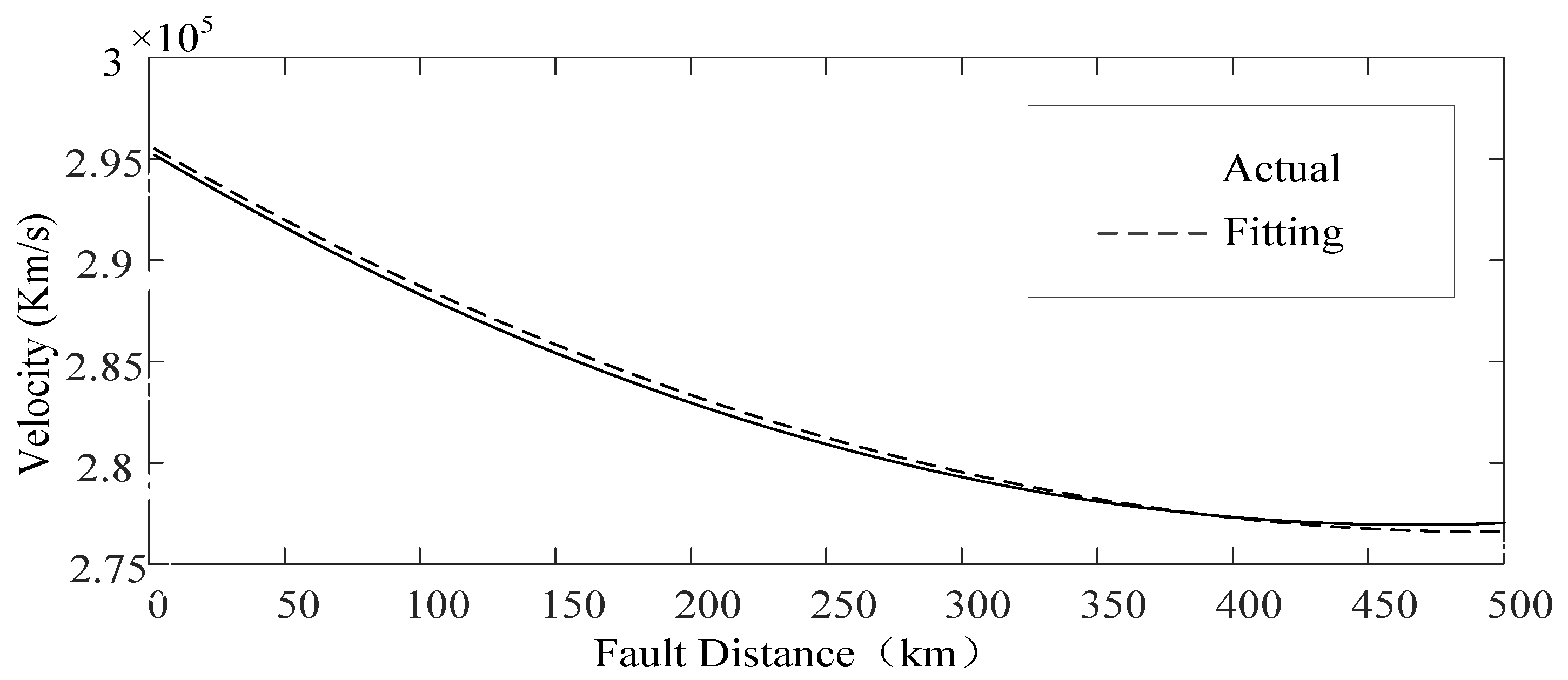
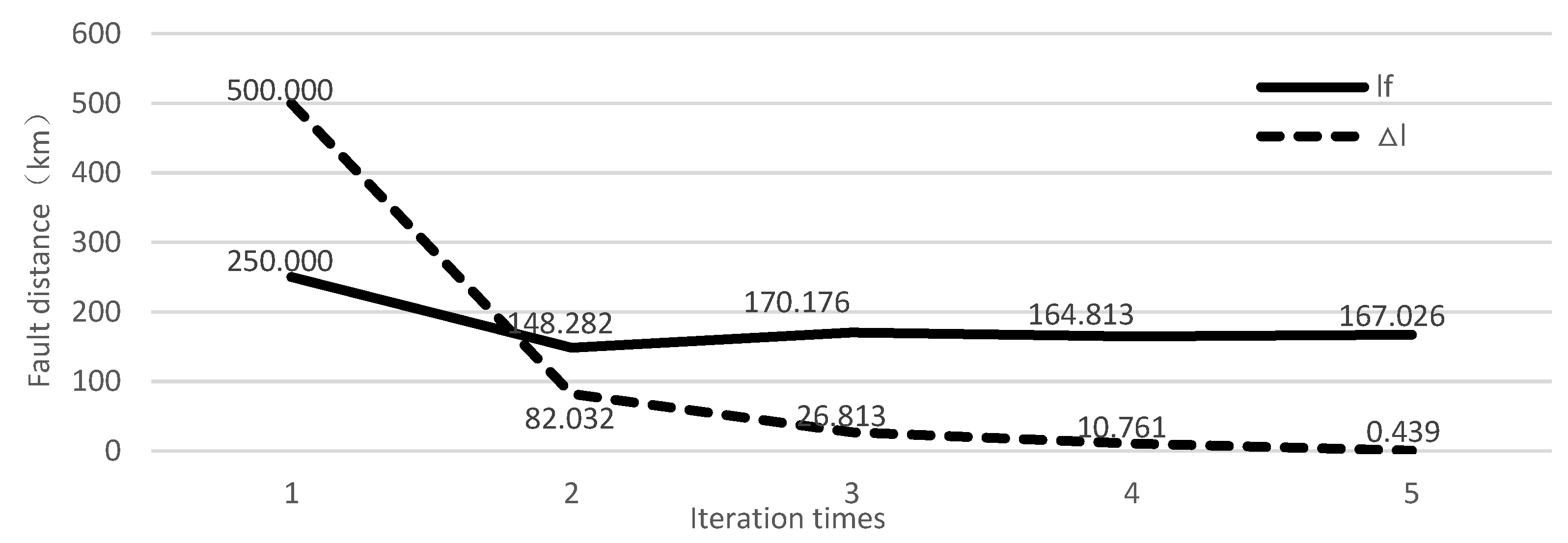
Acquiring the quadratic function by MATLAB fitting, it is necessary to have significant fault data and information, collected along the lines, which is impossible for operating lines. The least squares method [
28] can be used, which only needs more than three points. Therefore, some ground-mode velocities can be found based on the simulation model in PSCAD/EMTDC (Manitoba HVDC Research Centre, Winnipeg, Canada) and using the actual parameters of line. However, the error between the simulation and actual lines is inevitable. In order to correct the error, few velocities achieved by the circuit breakers can be used for the least square method. The breakers commonly have a certain distance between each other, which the fitting correction of tendency can benefit from:
Among them, , , .






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}