1. Introduction
Satisfactory operation of a power system involves both active and reactive power- balance between generation and load. These balances drive two equilibrium points: frequency and voltage. Stable operation of interconnected power system requires both acceptable frequency and tie-line power exchange [
1]. Load frequency control (LFC), which is mainly used to maintain the standard frequency and the tie-line power exchange under schedule during any load changing event, can be defined as regulation of active power and frequency [
2]. As the regulated output of the LFC, an area control error (ACE) that has a linear relationship between tie line power and frequency deviation is considered. Basically, LFC is responsible for controlling ACE zero and to do this, frequency and tie-line power errors need to be zeros.
There are a number of decentralized LFCs in the literature; however, Proportional Integral Derivative (PID) control is the most widely used in power industry [
3,
4,
5,
6]. Although PID controllers are widely employed in industry for their simplicity in implementation, their primary hinderances are large frequency deviation and long settling time (about 10 to 20 s) during disturbances [
7]. In [
8] four fundamental technical limitations in the existing PID framework are mentioned, including the following: (1) the error computation; (2) noise degradation in the derivative control; (3) over simplification and the performance loss; and (4) integral term control complications.
The corresponding technical and conceptual solutions of an ADRC-based control system instead of a PID-based control system are proposed in [
8].The four fundamental limitations of PID controllers can be resolved by introducing the following four characteristics: (1) a differential equation need to be added; (2) a differentiator for noise-tolerant tracking; (3) the total disturbance rejection and estimation; and (4) the power of nonlinear control feedback.
Fuzzy logic based decentralized LFC is widely applied in [
9,
10,
11,
12]. Specifically, a fuzzy logic controller, developed directly from a fuzzy model of the power system, is proposed in [
9]. A fuzzy logic based tie-line bias control scheme on a two-area multiple-unit power system is introduced in [
10]. The comparisons between fuzzy logic and conventional PID control techniques are presented for a combined cycle power plant in [
11]. In the Iraqi National Super Grid power system, a fuzzy gain-scheduled Proportional Integral (PI) controller and its execution is implemented in [
12]. Such a controller is often combined with PI or PID controllers to optimally adjust PID gains. PI controllers have been broadly used for decades in industry as the load frequency controllers. A model-following controller for multiple-input multiple-output (MIMO) systems is presented in [
13]. A PI controller, which is tuned through genetic algorithm linear matrix inequalities (GALMI), is demonstrated for LFC in a nine-unit power system for three areas [
14]. A high-order learning control law terminal iterative learning control (TILC) is developed to improve control performance. The new developed control law is a data-driven control strategy, where any other model information of the control plant do not need except for the I/O measurements [
15]. The model-free sliding mode controllers have been applied to control the azimuth and pitch positions in two single input single output control loops and it has proved its effectiveness over intelligent PI control system [
16]. The ADRC technique is adopted to resolve the output power variation of wind turbines in the sub-controllers’ switching process. The switching transition of output power is reduced using ADRC and the system’s performance is improved [
17].
In recent years, active disturbance rejection control (ADRC), developed by Han in 1995 [
18] and modified by Gao [
18,
19,
20], is proposed for the LFC controller [
21,
22,
23]. It is an emerging controller that estimates and mitigates uncertainties internally and externally in real time. For these reasons ADRC controller is often seen to apply in power systems. The basic idea of ADRC is that it uses an Extended State Observer (ESO) for estimating and cancelling the disturbances of the system for simplification of the control problem. The design process of the controller is simple that does not need an accurate system model. This controller, showing robustness during sudden disturbances and structural uncertainties, can be used as decentralized [
24].
ADRC is implemented for LFC on an interconnected power system in [
25,
26,
27,
28]. This controller for LFC is studied in the Bangladesh Power System (BPS) [
25]. ADRC and PI-Fuzzy compound controller are proposed and applied for the current compensation of Active Power Filters [
26]. In addition, the ADRC is revealed to be superior to the existing GALMI tuned PI controller in smaller ACE and ∆f and faster response of the closed-loop system. A novel design of a robust decentralized LFC is proposed for an interconnected power system in [
27]. Moreover, the effects of system parameter variations on ACE, frequency error and tie-line power error, are also reported. The ADRC is modified using a Repetitive Controller (RC) and applied to a power system with two different turbine units in [
28] enhancing the performance of ADRC as a controller. A coordinated controller based on multivariable predictive control theory is presented to demonstrate its effectiveness during variable operation with unpredictable renewable energy generation and load changes in [
29]. For the application of current compensation of active power filter, ADRC and PI-fuzzy are proposed n [
30].
In an interconnected power system, each area of the power system is able to import and/or export a certain amount of power using transmission-line interconnections or tie-lines. Tie-line power exchange of a power system is inversely proportional with the reactance of transmission line [
31]. The impacts of tie-line synchronizing co-efficient of interconnected power system is an important issue in LFC that is not reported in existing literature to the best of our knowledge. In [
32], it is described that generators share the impact according to their electrical proximity to the point of impact immediately after disturbances in a power system. Stability power system can be improved by introducing a new gain into the dynamic model. The value of extra gain will set in such a way that the generator nearest to the disturbance exhibit responses for the corresponding disturbances alone and rest of the generators will not response at all. As a result, system will be capable of continuing its operation without any blackout. In [
33], it is demonstrated that the large inertia generators has a minimum frequency deviations .Quality of the grid power will strengthen if entire generator in a system response equally regardless of their inertia constant (
H). That means response of higher inertia constant will increase. It will decrease for the generator of lower inertia constant. An extra gain value can be added in the dynamic model to accomplish this. The value of the extra gain block can be selected by normalizing the
H-constant of existing generators. An ADRC based LFC controller considering the effects of generator electrical proximity to the point of impact and the effects of generator
H-parameter is not reported in the existing literature.
The rest of this paper is structured as follows: The architecture of ADRC and ADRC-based LFC models for generator electrical proximity to the point of impacts and generator
H-constant effect are proposed in
Section 2. The modeling of interconnected power system for ADRC-based LFC is also shown in this section. A theoretical analysis of the factors affecting the performance of ADRC-based LFC of interconnected power system is discussed in
Section 3.
Section 4 presents the simulation results and proposes the model for generator electrical proximity to the point of impacts and generator
H-constant effect. Finally, a fast acting ADRC-based LFC is evaluated.
2. Design Architecture of ADRC- and ADRC-Based LFC Models
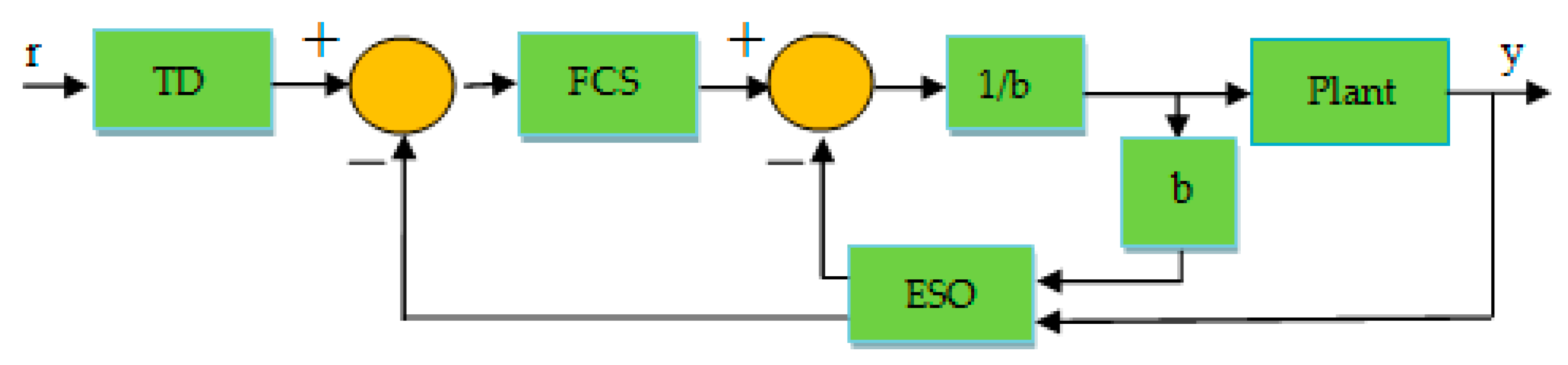
The aims of this section are to describe in details the controller models and their extension for an interconnected power system. The ADRC architecture is presented in
Figure 1. ADRC mainly consists of three parts: tracking differentiator (TD), feedback control system (FCS) and extended state observer (ESO). FCS is the combination of errors between state estimates generated from TD and ESO. ESO is a core part of ADRC. It tracks the output of the object,
y, and estimates of state variable of the object at various orders with the approximation of uncertainties. Here
r is the reference set point and
b is the compensation factor.
A plant with disturbance can be characterized as:
where
U(s) and
Y(s) are the input and the output, respectively, and
W(s) represents the generalized disturbance. The physical plant
Gp(s) can be represented as transfer function as follows:
where
R(s) is the reference input and
ai (
i = 1,…,
n) and
bj (
j = 1,…,
m) are coefficient of the transfer function.
The ADRC is designed in a higher-order system by deriving the algebra of polynomials from the transfer function in order to facilitate the analysis. Therefore, an equivalent model of Equation (2) is essential in the polynomial form to implement ADRC for the plant of Equation (1). In the generalized disturbance term, any error between the two models can be considered.
The polynomial long division is derived as simplified equivalent model as follows:
In Equation (3),
ci (
i = 0,…,
n −
m) are coefficients of polynomial division result, and the
Gleft(s) is a reminder, which can be signified by:
In Equation (4),
dj (
j = 0, …,
m − 1) is coefficient of the numerator of the remainder. Substituting Equation (3) into Equation (1) gives Equation (5), where,
(s) =
W(s)/
Gp:
Equation (5) can be rewritten as:
From Equation (3), it can be seen that:
As the expression of the other coefficients (such as
ci and
dj) in Equations (3) and (4) is complex,
D(s) can be treated as a generalized disturbance which is estimated in time domain for the development of the ADRC controller. It is clear from Equation (7) that the two characteristics (relative order between input and output and controller gain) are extracted from the plant by revising the Laplace transform. Instead of using the n order of plant, the relative order n-m may be employed as the order of the controller system and Equation (7) can be written as:
where:
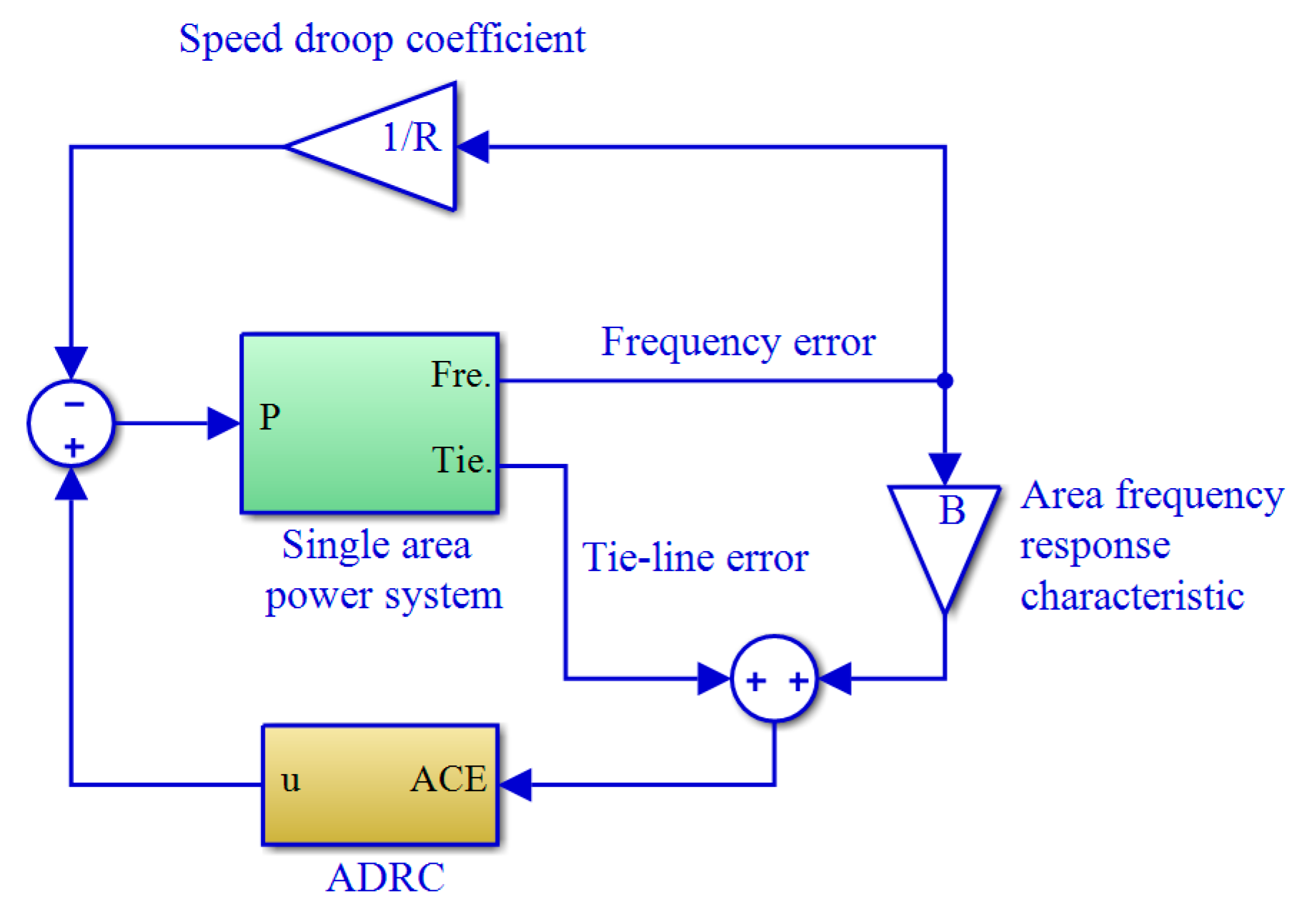
The block diagram of an ADRC based LFC model is represented in
Figure 2.The single area power system block consists of governor, turbine and generator. The single area power system block takes the error produced from frequency deviations and output of the controller as an input and sends frequency and tie power flow deviations as outputs. The ADRC controller takes the ACE that is the result from combination of power deviation and frequency as an input, and produces the output,
u.
Proposed ADRC-Based LFC Model
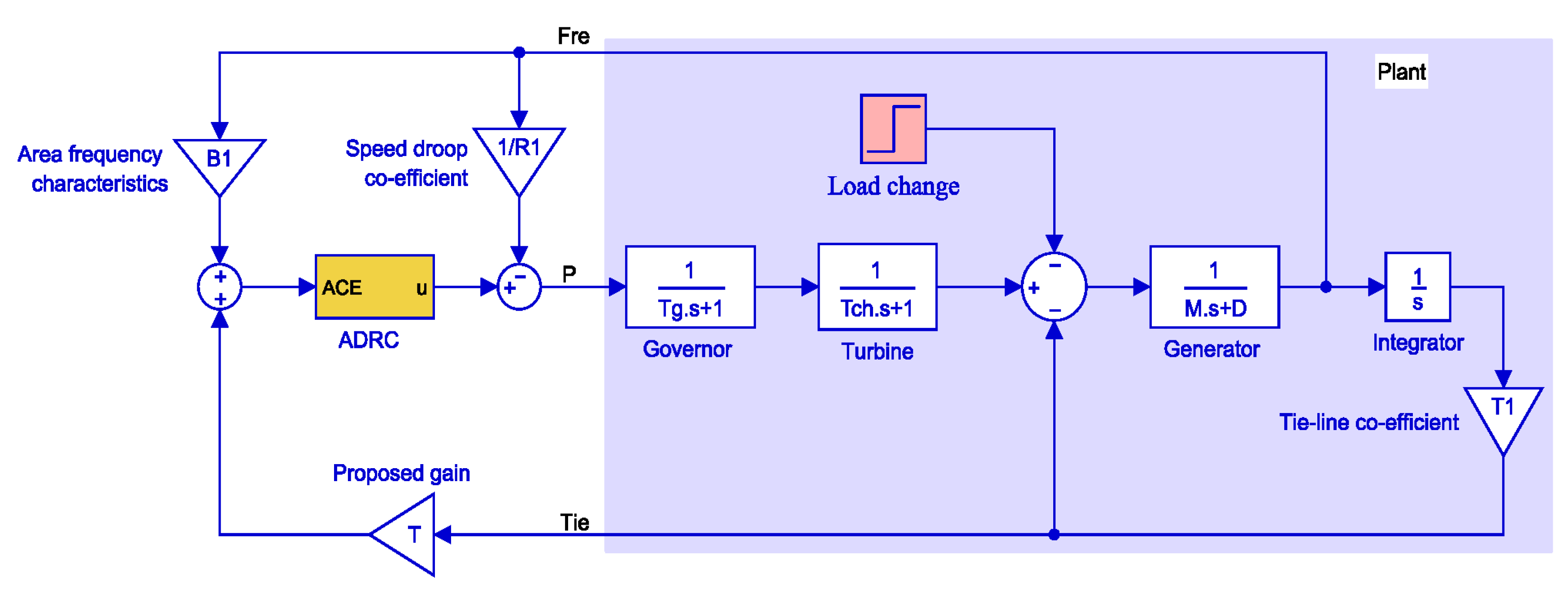
The dynamic model of ADRC-based LFC is modified to observe the effects of generator electrical proximity to the point of impact and generator inertia-constant on interconnected power system shown in
Figure 3. This modification is essential as the electrical proximity of generators has a great impact on the performance of power system. A new gain block is introduced for the first time in the dynamic model as a modification of the system, and the output of this gain block is provided to the input of ADRC. A strategy that is taken for selecting the gain block of generator electrical proximity to the point of impact is that, gain will increase with decreasing the distance between the disturbance and generator.
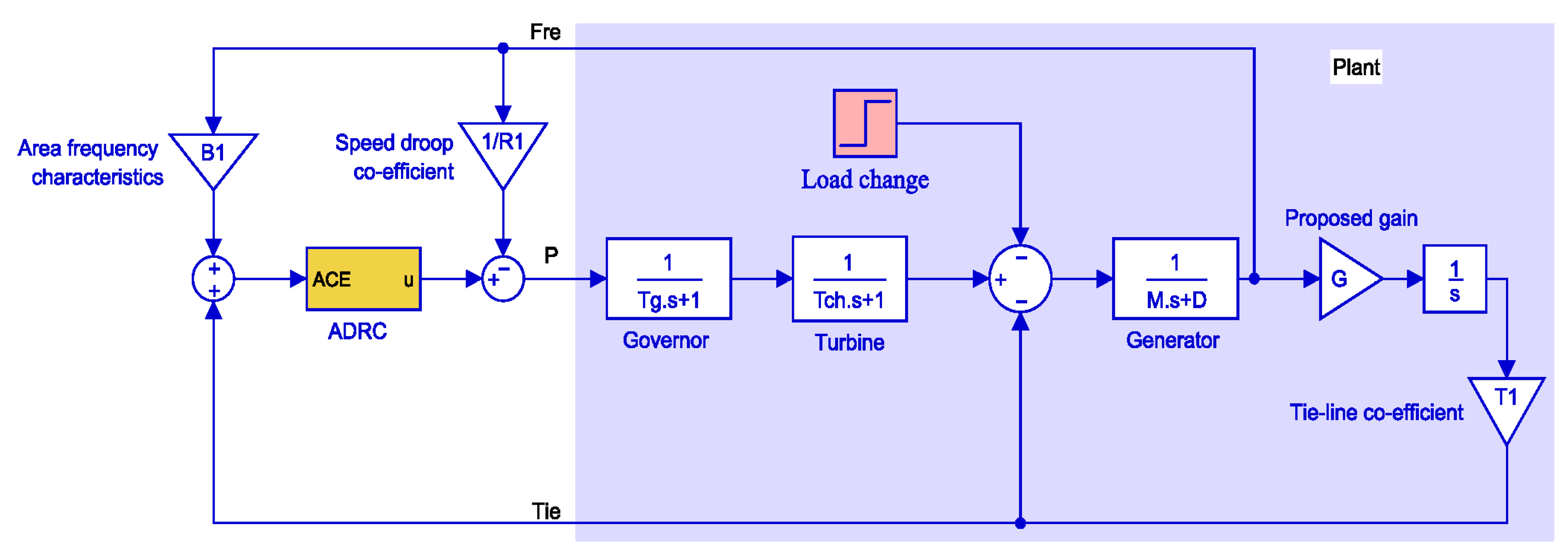
The LFC performance of an interconnected power system to a certain extent depends on the generator
H-constant. Therefore, the dynamic model of ADRC based LFC is modified by introducing a gain block to observe the effect of generator
H-constant and shown in
Figure 4. The value of the gain block is chosen by normalizing of all existing generator’s
H-constant.
Extension of the Proposed Model to Interconnected Power Systems
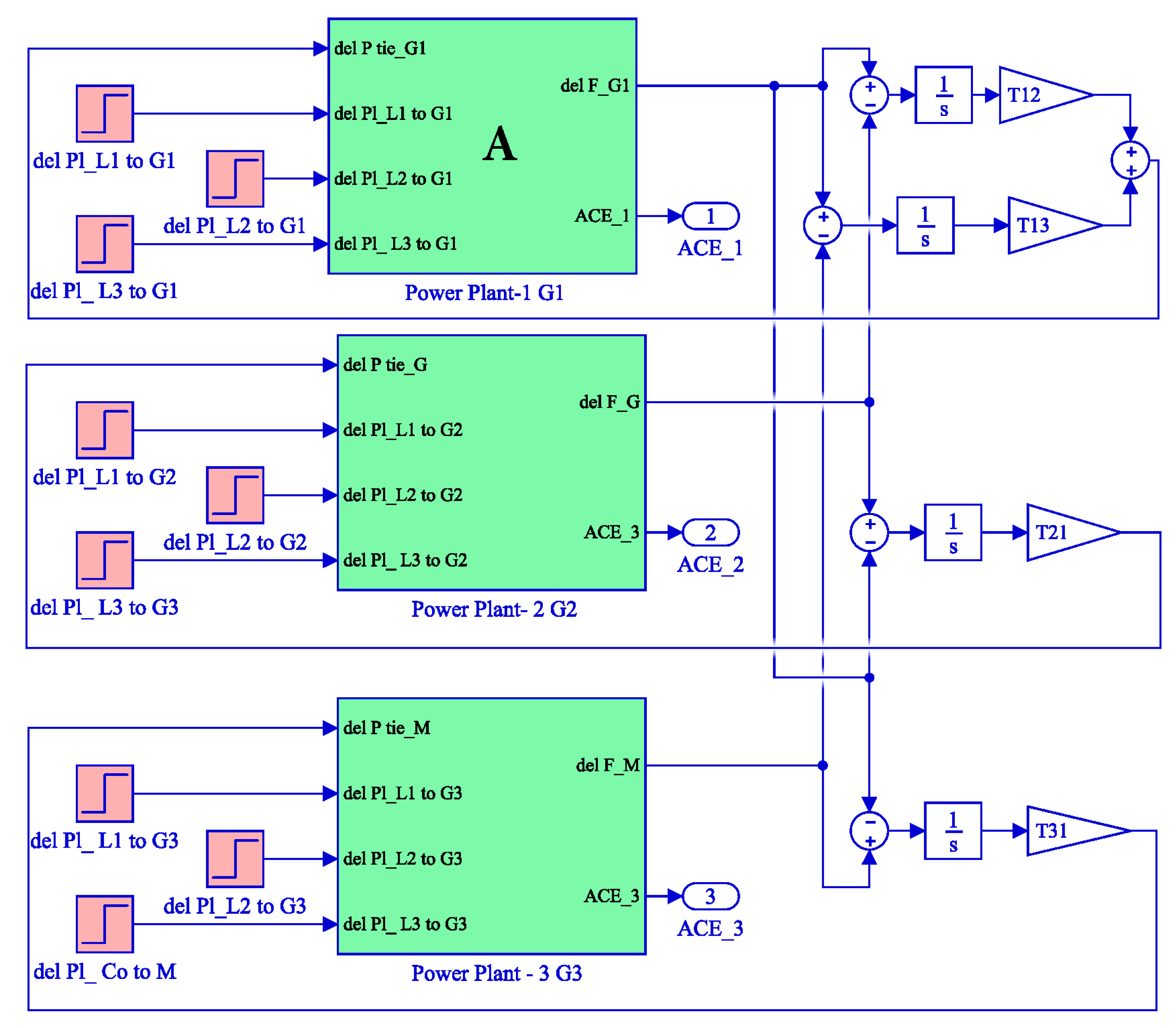
An ADRC-based LFC of an interconnected power system consisting of three generation rich areas and three load rich areas (3G3L) is considered in
Figure 5. An equivalent generator is modeled to represent all generators in one area as they respond coherently during disturbances. All load rich areas are considered as connected to all generation rich areas through communication network. Each power plant block has three load disturbance signals as input. The load change signal can be calculated at the load buses by measuring the line power flow at those buses. Hence, this signal will be transmitted to the power plants. The tie-line synchronizing coefficient (
T) between load rich areas to generation rich areas is dependent on the distance between them and the reactance of the corresponding transmission line. The design parameters of the system and ADRC parameters are listed in
Appendix A,
Table A1,
Table A2 and
Table A3.
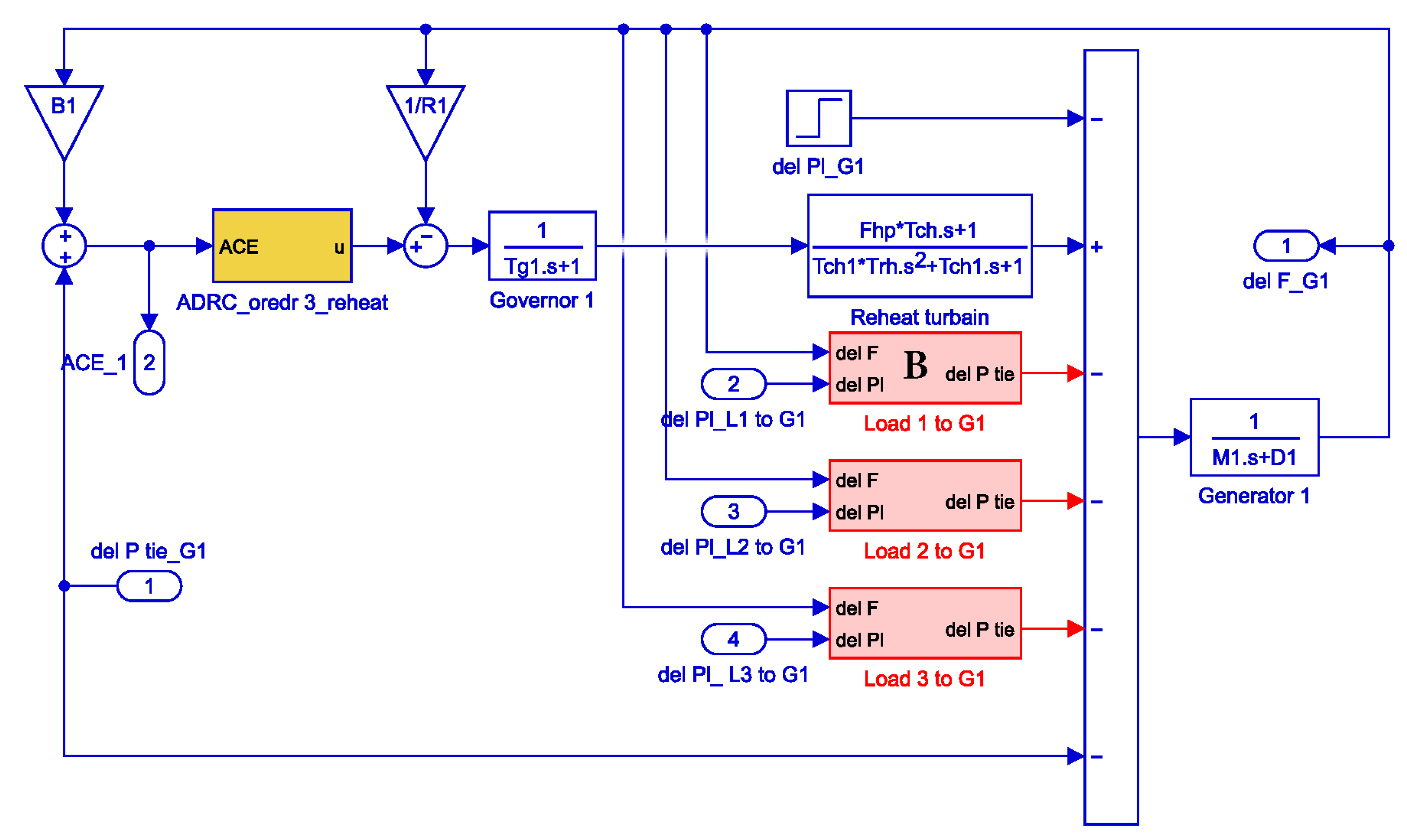
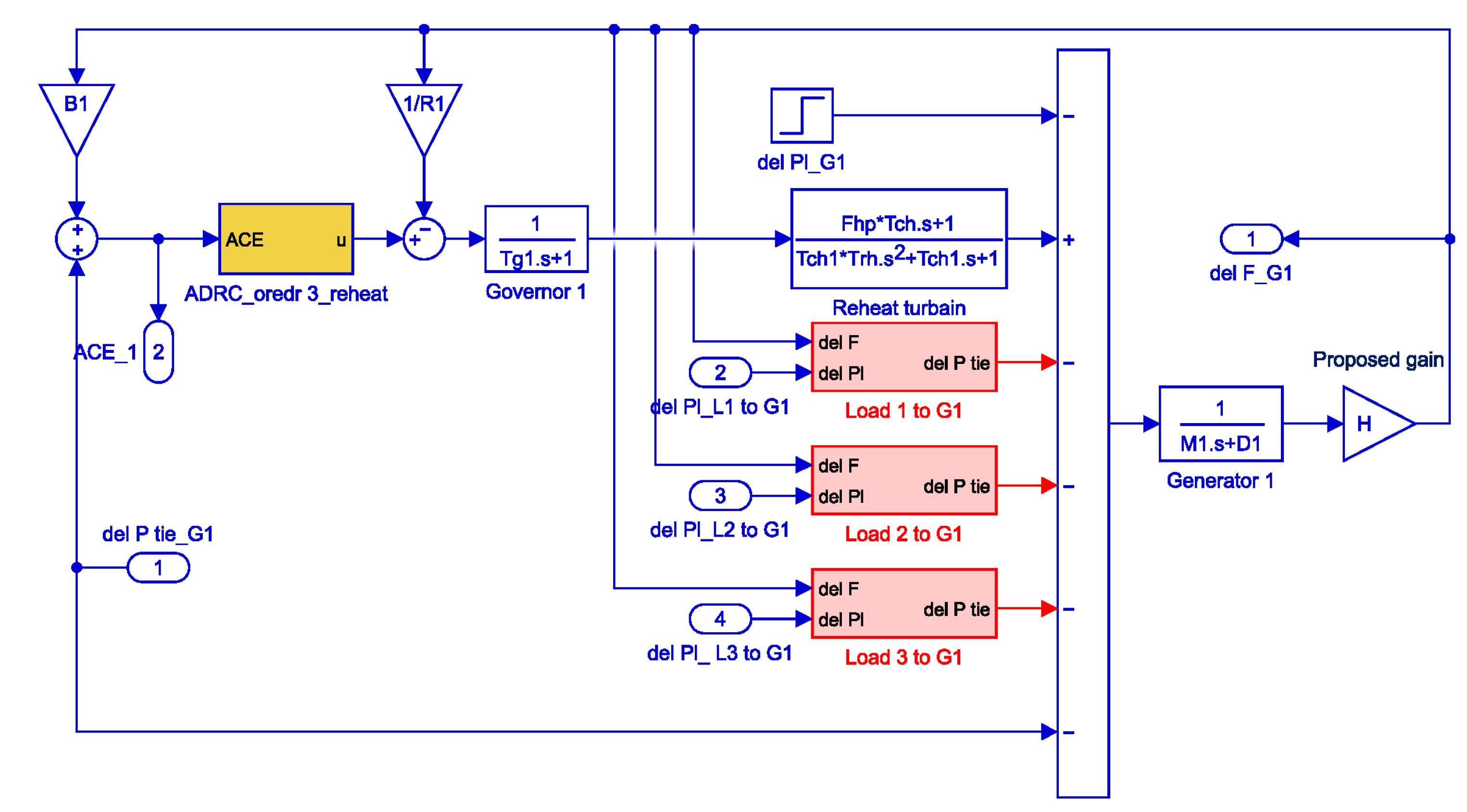
All the power plants (G
1, G
2 and G
3) of
Figure 4 are considered similar. The sub-system of power plant 1 is shown in
Figure 6. In generation rich areas, a re-heat turbine is used with the governor and generator. The output of the generator of this block is a frequency deviation which is first integrated then multiplied by tie-line synchronizing coefficient between load (L
1) to generation (G
1) to get the tie-line deviation (del P tie).
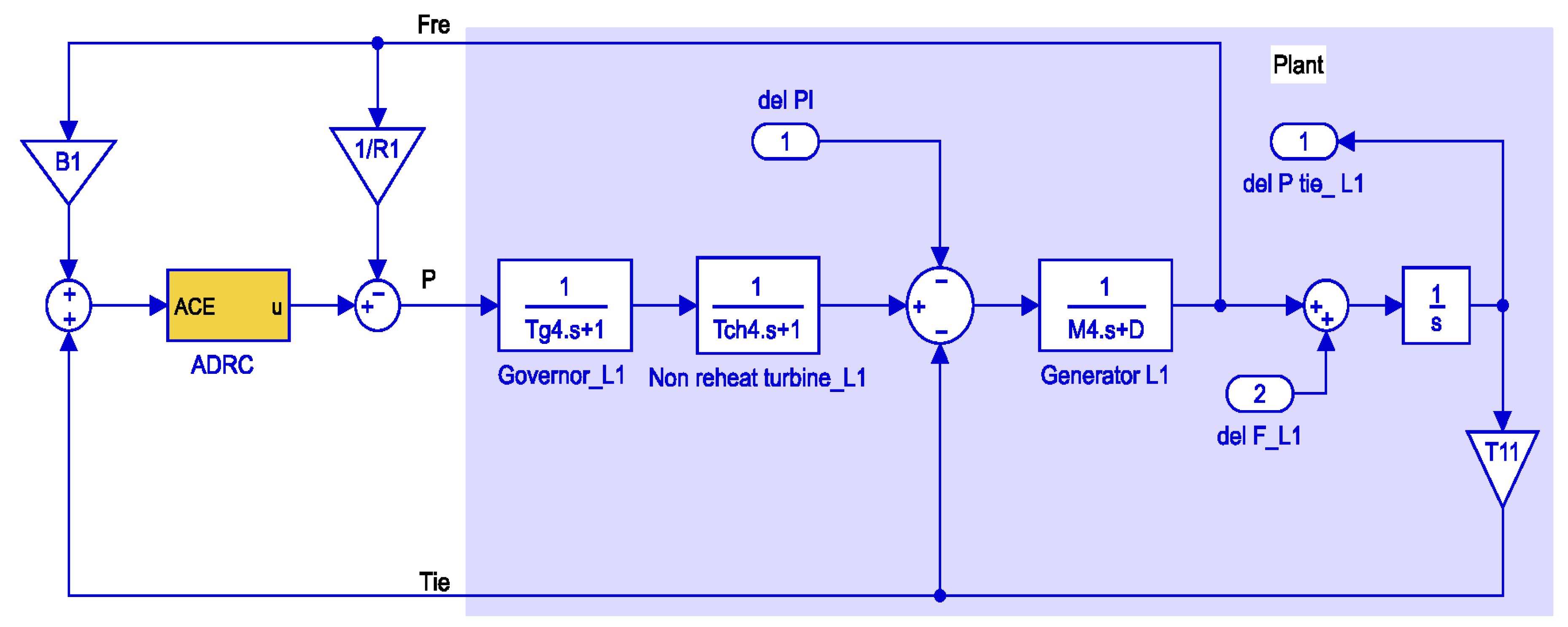
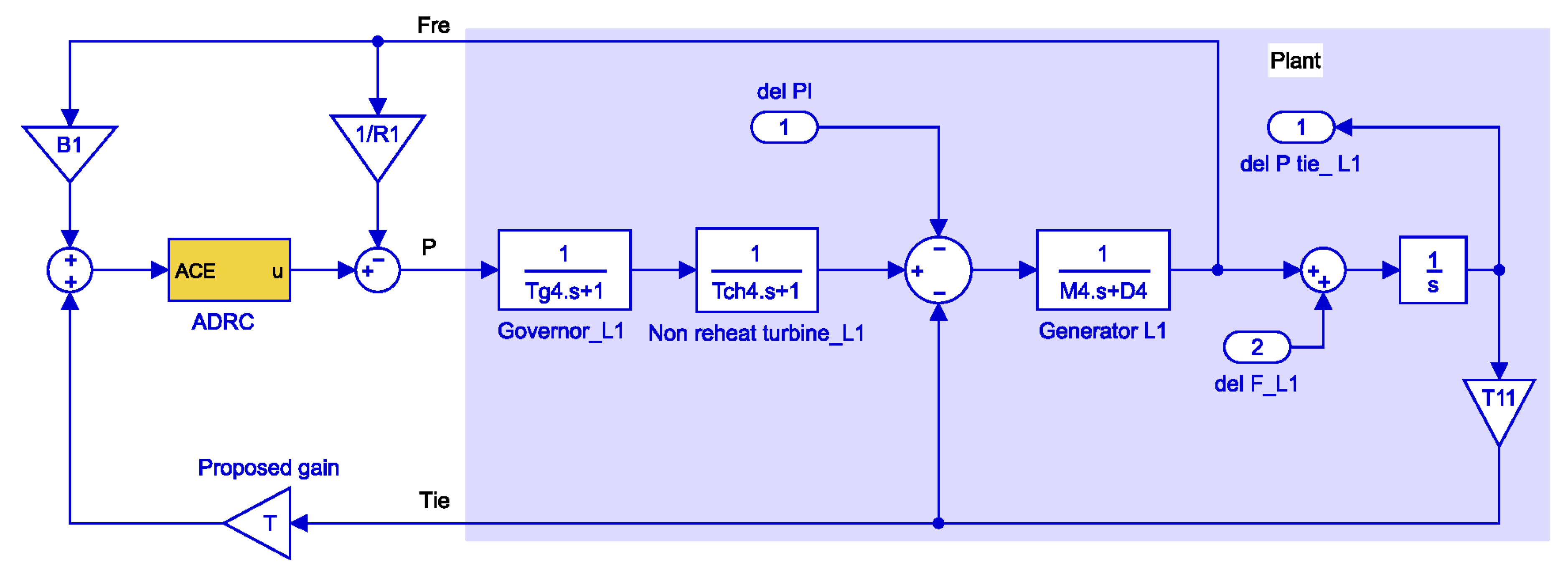
The details of a load rich area is shown in
Figure 6, where a non re-heat turbine is used with the governor and generator. Finally, considering all these
Figure 5,
Figure 6 and
Figure 7, the complete model of an interconnected power system for ADRC-based LFC is ready to calculate the effect of ACE, frequency deviation and tie-line flow deviation if there is any load change.
5. Comparison among ADRC-Based LFC
A comparison among the standard ADRC, ADRC considering tie-line synchronizing co-efficient (
T), and ADRC considering generator
H-constant for an ADRC-based LFC is tabulated in
Table 3. Load change of 0.1 p.u. is applied separately from L
1, L
2 and L
3.
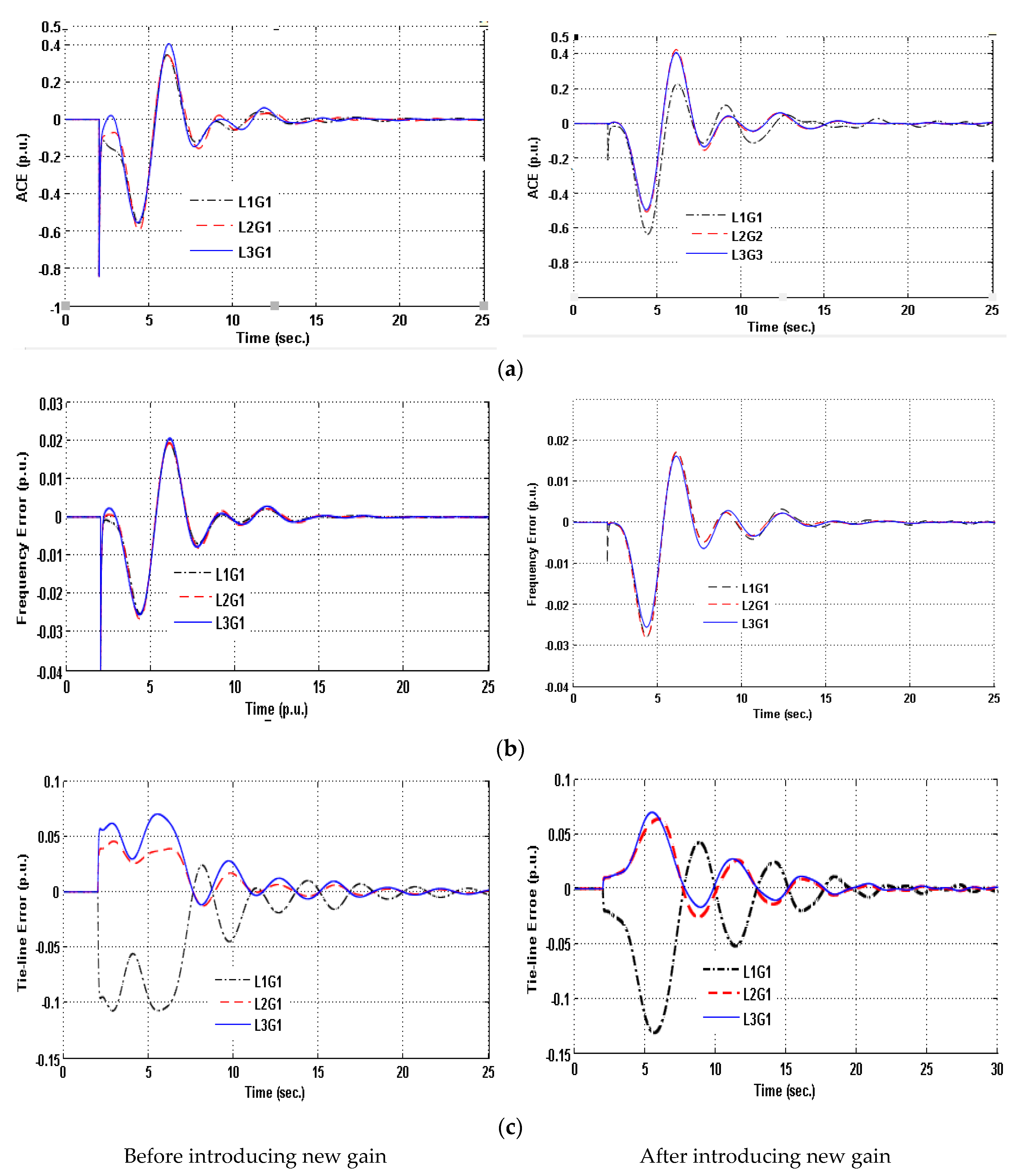
The magnitude of ACE represents the generator response. The higher magnitude of ACE of generator belongs to higher response due to load change. It can be seen from the second column of
Table 3 that due to the same amount of disturbance, the response of L
1G
1 becomes the highest since G
1 is considered nearest to the disturbance. In the third row, due to the new introduced gain with
T consideration, the error magnitude (ACE) of L
1G
1 has increased from 0.60 p.u. to 0.83 p.u. On the other hand, the error magnitudes are decreased in L
1G
2 and L
1G
3, so the nearest generator is carrying the highest disturbance impact.
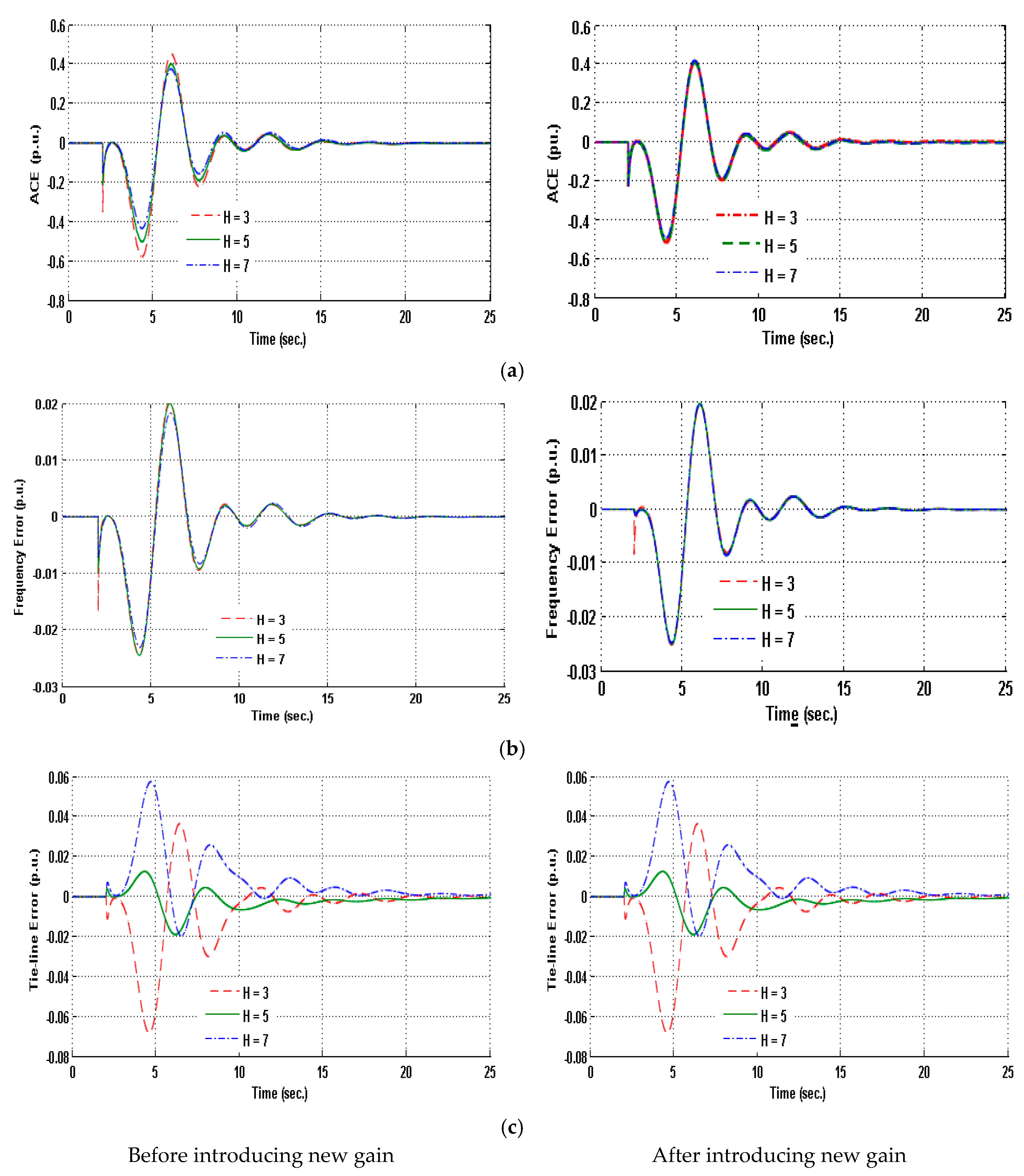
In the fourth row, the H-constant of generators are considered as 3, 5 and 7 for G1, G2 and G3 respectively, so due to the application of disturbance, the response of G1 become highest where it is lowest in G3, but if all the generators of an interconnected power system respond equally during the disturbance, then the generator’s with higher H constant will share the higher load change impact. This is achieved by introducing the new gain shown in the fifth row. Therefore, it can be concluded that it is a fast acting ADRC-based LFC. Comparing the proposed ADRC controller and standard ADRC controller, the simulation results reveal that the proposed controller can provided an improved performance for LFC during random and continuous load disturbances.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











