A Digital Hysteresis Current Control for Half-Bridge Inverters with Constrained Switching Frequency


Abstract
1. Introduction
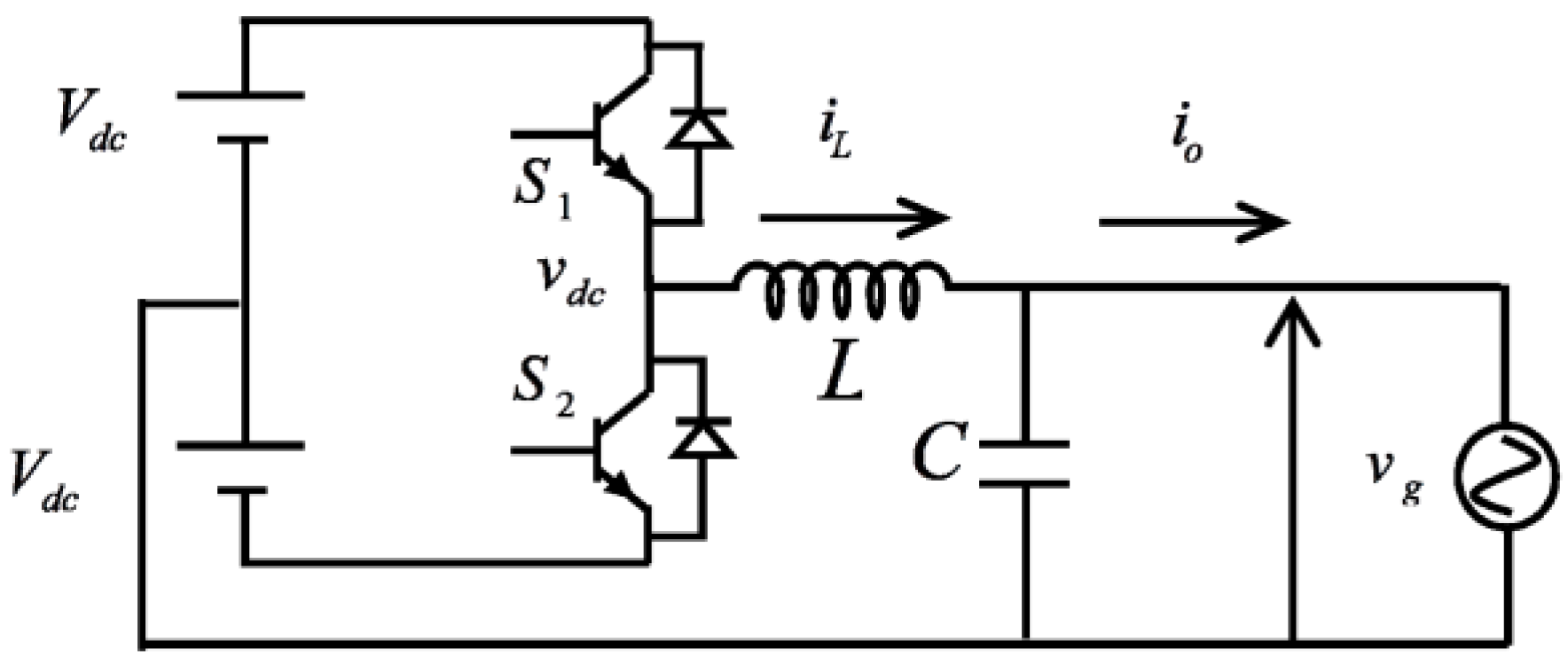
2. Classical Fixed Band Hysteresis Current Control
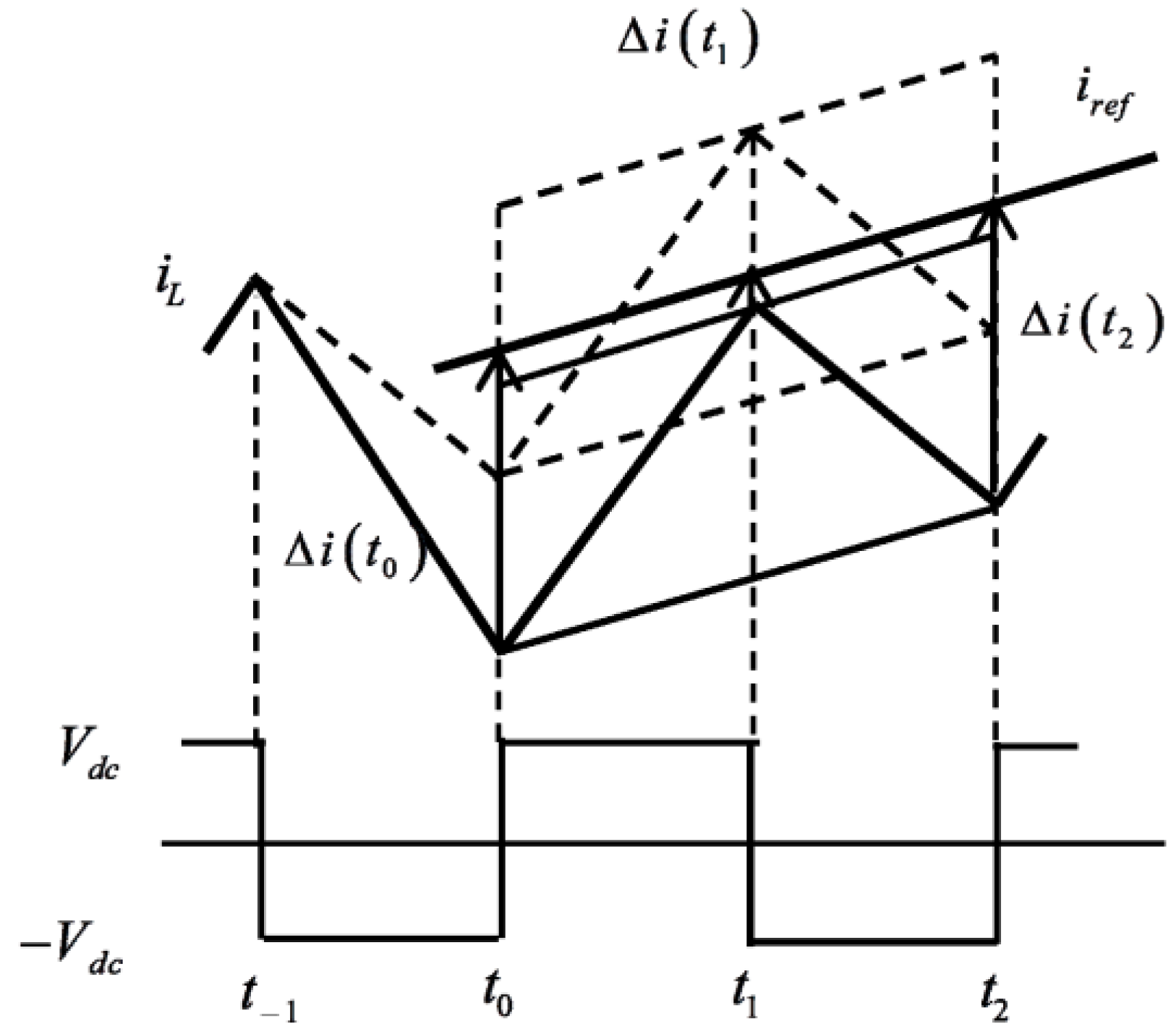
3. Conventional Adaptive Hysteresis Current Control
3.1. Algorithm of the Convention Adaptive Hysteresis Current Control
3.2. Disadvantages of Conventional Adaptive Hysteresis Current Control
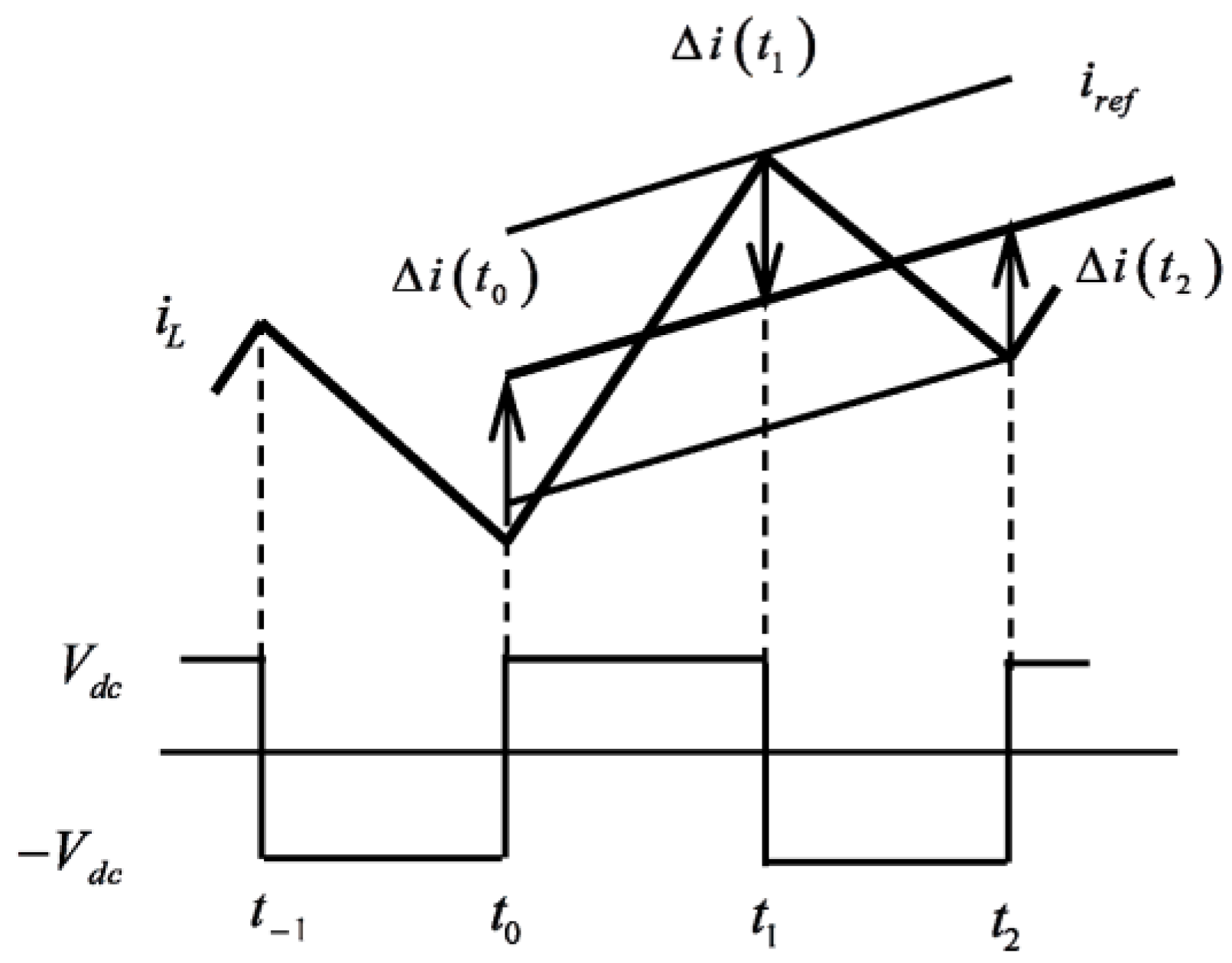
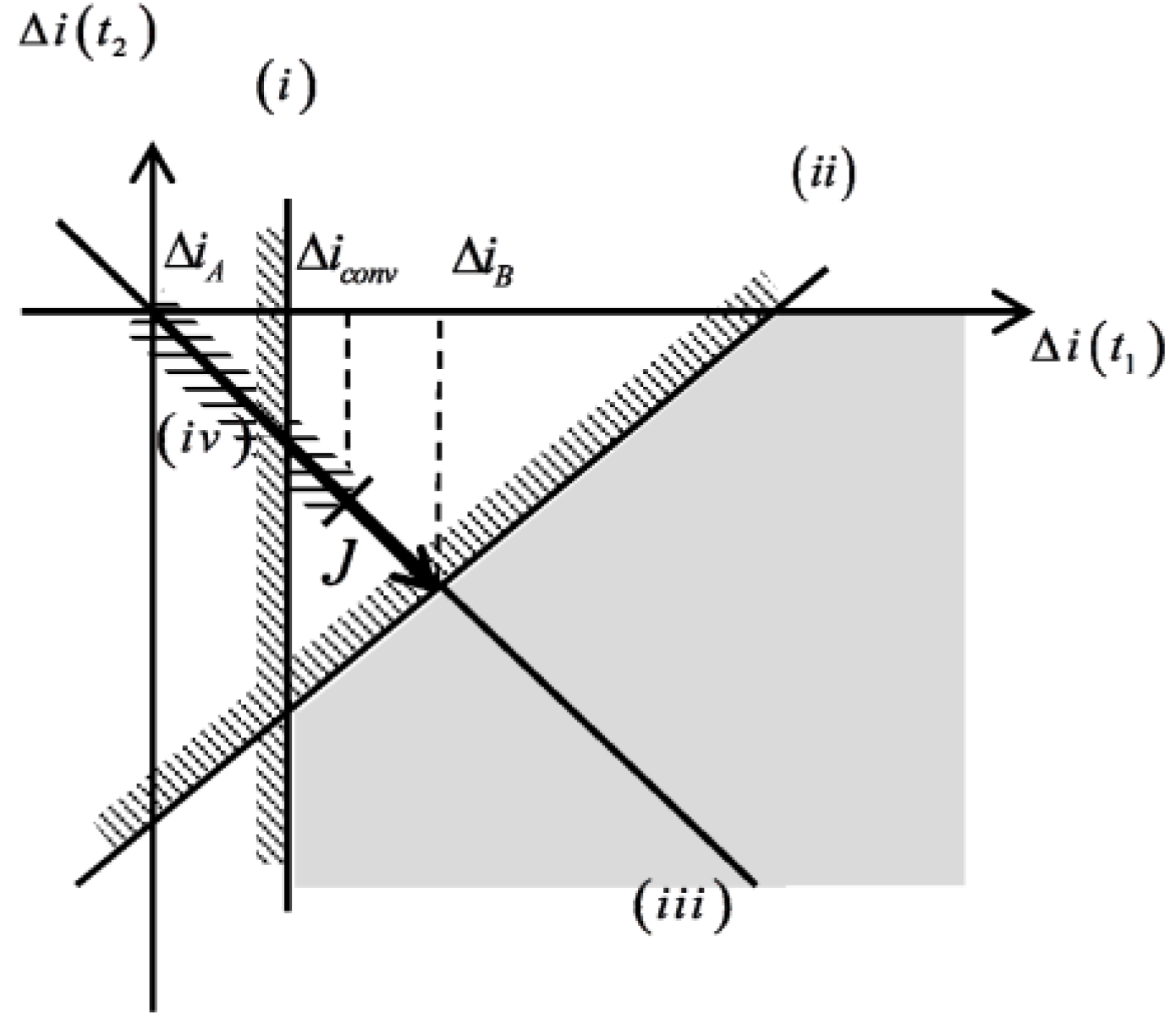
4. Proposed Robustly Adaptive Hysteresis Current Control
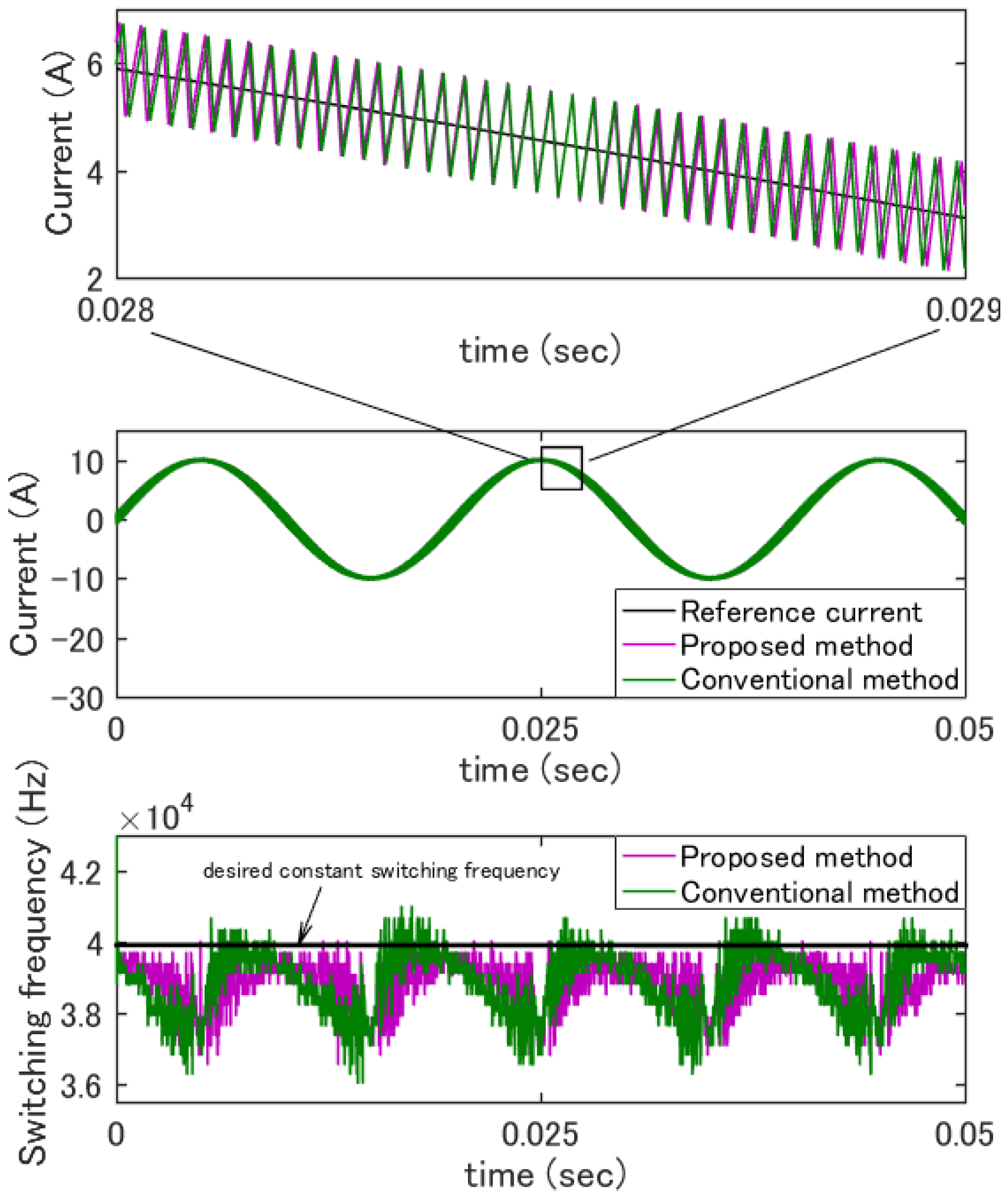
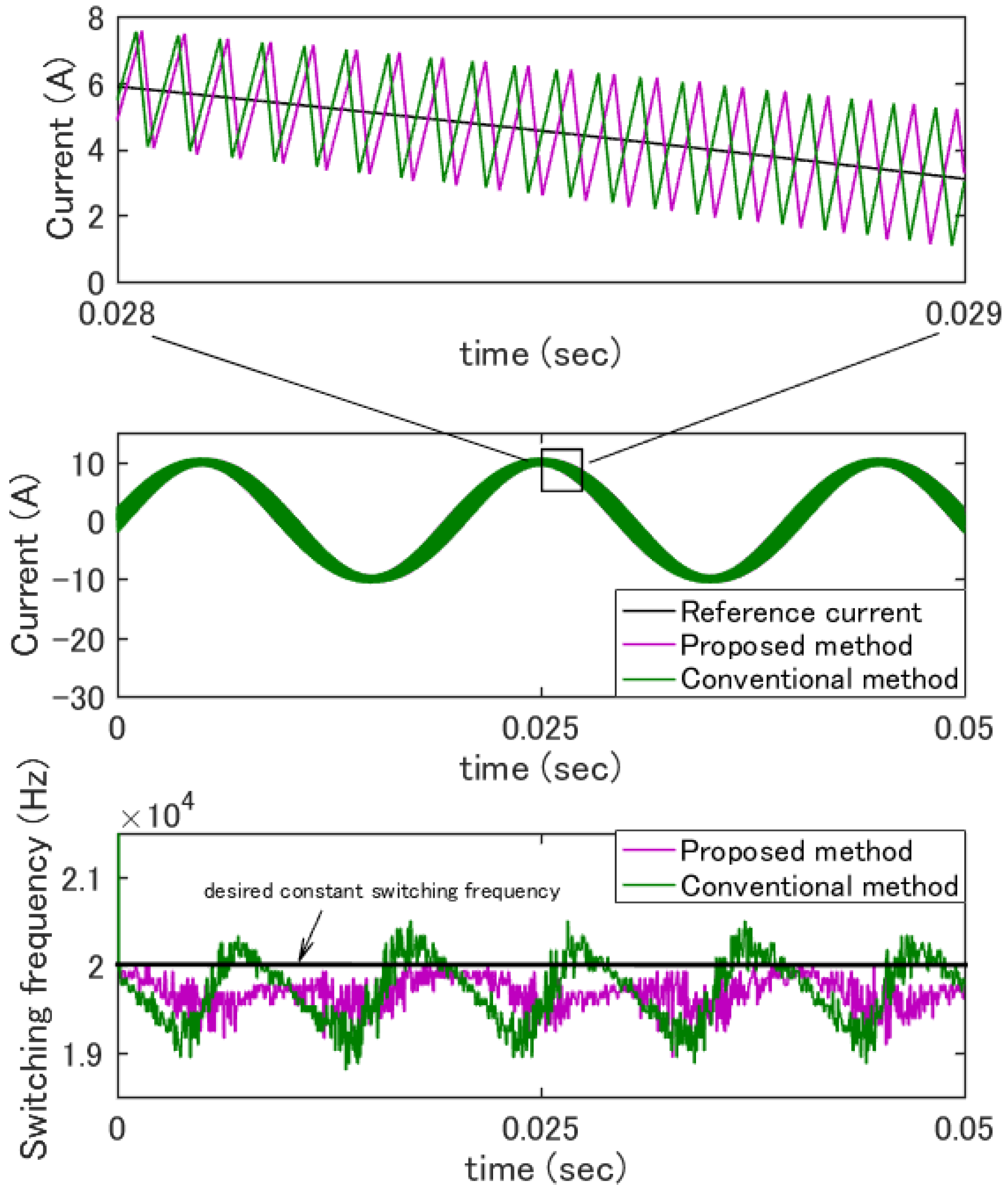
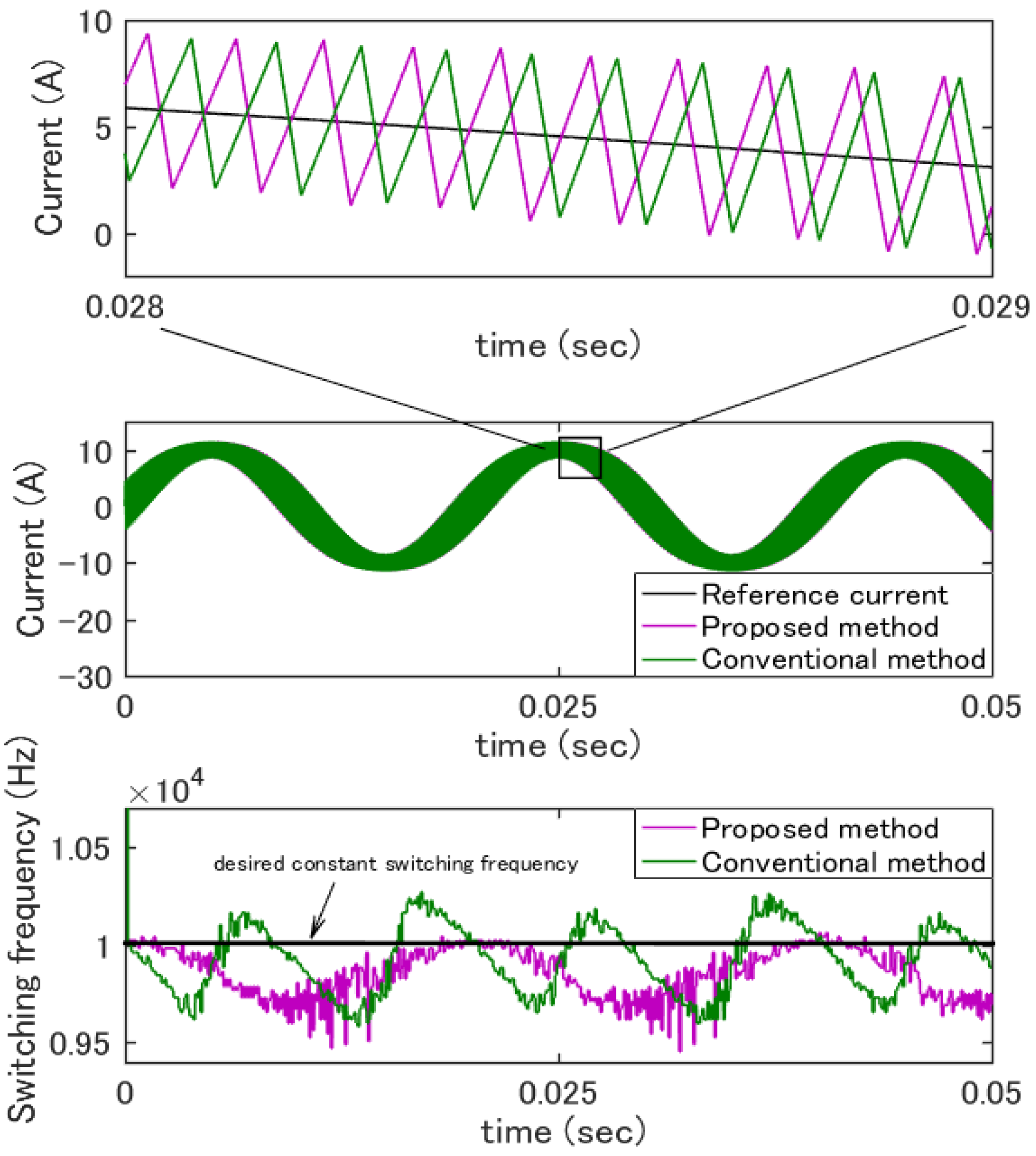
5. Simulation Results
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.-W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Khayyer, P.; Ozguner, U. Decentralized Control of Large-Scale Storage-Based Renewable Energy Systems. IEEE Trans. Smart Grid 2014, 5, 1300–1307. [Google Scholar] [CrossRef]
- Abe, R.; Taoka, H.; McQuilkin, D. Digital Grid: Communicative Electrical Grids of the Future. IEEE Trans. Smart Grid 2011, 2, 399–410. [Google Scholar] [CrossRef]
- Liu, C.-C.; McArthur, S.; Lee, S.-J. Smart Grid Handbook; Wiley: West Sussex, UK, 2016. [Google Scholar]
- Marian, P.K.; Krishnan, R.; Blaabjerg, F.; Irwin, J.D. Control in Power Electronics Selected Problems; Academic Press: San Diego, CA, USA, 2002. [Google Scholar]
- Séguier, G.; Labrique, F. Power Electronic Converters: DC-AC Conversion; Electric Energy Systems and Engineering Series; Springer: Berlin, Germany; New York, NY, USA, 1993. [Google Scholar]
- Vazquez, G.; Rodriguez, P.; Ordonez, R.; Kerekes, T.; Teodorescu, R. Adaptive hysteresis band current control for transformerless single-phase PV inverters. In Proceedings of the 35th Annual Conference of IEEE. Industrial Electronics IECON, Porto, Portugal, 3–5 November 2009. [Google Scholar]
- Buso, S.; Malesani, L.; Mattavelli, P. Comparison of current control techniques for active filter applications. IEEE Trans. Ind. Electron. 1998, 45, 722–729. [Google Scholar] [CrossRef]
- Buso, S.; Fasolo, S.; Malesani, L.; Mattavelli, P. A dead-beat adaptive hysteresis current control. IEEE Trans. Ind. Appl. 2000, 36, 1174–1180. [Google Scholar] [CrossRef]
- Kale, M.; Ozdemir, E. An adaptive hysteresis band current controller for shunt active power filter. Electr. Power Syst. Res. 2005, 73, 113–119. [Google Scholar] [CrossRef]
- Bose, B.K. An adaptive hysteresis-band current control technique of a voltage-fed PWM inverter for machine drive system. IEEE Trans. Ind. Electron. 1990, 37, 402–408. [Google Scholar] [CrossRef]
- Malesani, L.; Mattavelli, P.; Tomasin, P. Improved constant-frequency hysteresis current control of VSI inverters with simple feedforward bandwidth prediction. IEEE Trans. Ind. Appl. 1997, 33, 1194–1202. [Google Scholar] [CrossRef]
- Poulsen, S.; Andersen, M.A.E. Hysteresis controller with constant switching frequency. IEEE Trans. Consum. Electron. 2005, 51, 688–693. [Google Scholar] [CrossRef]
- Attaianese, C.; Monaco, M.D.; Tomasso, G. High Performance Digital Hysteresis Control for Single Source Cascaded Inverters. IEEE Trans. Ind. Inform. 2013, 9, 620–629. [Google Scholar] [CrossRef]
- Hao, Y.; Fang, Z.; Feng, Z.; Zhenxiong, W. A Digital Hysteresis Current Controller for Three-Level Neural-Point-Clamped Inverter With Mixed-Levels and Prediction-Based Sampling. IEEE Trans. Power Electron. 2016, 31, 3945–3957. [Google Scholar]
- Jens, O.K.; Markus, H.; Andreas, R.; Rolf, R. FPGA-based Control of Three-Level Inverters, in International Exhibition & Conference for Power Electronics. In Proceedings of the Intelligent Motion and Power Quality, Nuremberg, Germany, 17–19 May 2011; pp. 378–384. [Google Scholar]
- Nguyen-Van, T.; Abe, R. An Indirect Hysteresis Voltage Digital Control for Half Bridge Inverters. In Proceedings of the 2016 IEEE Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016. [Google Scholar]
- Javier, C.; Domingo, B.; Francesc, G.; Alberto, P.; Francesc, M.; Eduard, A. FPGA-based design of a step-up photovoltaic array emulator for the test of PV grid-connected inverters. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istambul, Turkey, 1–4 June 2014; pp. 485–490. [Google Scholar]
- Ang, S.S.; Oliva, A. Power-Switching Converters, 2nd ed.; Electrical and Computer Engineering; Taylor & Francis: Boca Raton, FL, USA, 2005. [Google Scholar]
- Thiyagarajah, K.; Ranganathan, V.T.; Iyengar, B.S.R. A high switching frequency IGBT PWM rectifier/inverter system for AC motor drives operating from single phase supply. IEEE Trans. Power Electron. 1991, 6, 576–584. [Google Scholar] [CrossRef]
- Stefan, H.; Eckart, H.; Oleg, Z.; Klaus-Dieter, L.; Gudrun, F. Reducing Inductor Size in High Frequency Grid Feeding Inverters. In Proceedings of the PCIM Europe 2015 International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 19–20 May 2015; pp. 196–203. [Google Scholar]
- Tooley, M.H. Plant and Process Engineering 360, 1st ed.; Butterworth-Heinemann: Amsterdam, The Netherlands; Boston, MA, USA; London, UK, 2010. [Google Scholar]
- Pei, X.; Kang, Y. Short-Circuit Fault Protection Strategy for High-Power Three-Phase Three-Wire Inverter. IEEE Trans. Ind. Inform. 2012, 8, 545–553. [Google Scholar] [CrossRef]
- Nguyen-Van, T.; Abe, R. New hysteresis current band digital control for half bridge inverters. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Nantou, Taiwan, 27–29 May 2016. [Google Scholar]
- Zare, F.; Ledwich, G. A hysteresis current control for single-phase multilevel voltage source inverters: PLD implementation. IEEE Trans. Power Electron. 2002, 17, 731–738. [Google Scholar] [CrossRef]
- Buso, S.; Caldognetto, T. A non-linear wide bandwidth digital current controller for DC-DC and DC-AC converters. IEEE Trans. Ind. Electron. 2015, 62, 7687–7695. [Google Scholar] [CrossRef]
- Baker, K.R. Optimization Modeling with Spreadsheets, 3rd ed.; Wiley: West Sussex, UK, 2015. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Half Period | S1 | S2 | Input Voltage vdc | Output Current iL |
|---|---|---|---|---|
| Positive | On | Off | Increase | |
| Negative | Off | On | Decrease |
| Switching frequency | kHz | kHz | kHz |
| Proposed method | 97.1 | 98.4 | 99.3 |
| Conventional method | 95.2 | 97.2 | 98.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen-Van, T.; Abe, R.; Tanaka, K. A Digital Hysteresis Current Control for Half-Bridge Inverters with Constrained Switching Frequency. Energies 2017, 10, 1610. https://doi.org/10.3390/en10101610
Nguyen-Van T, Abe R, Tanaka K. A Digital Hysteresis Current Control for Half-Bridge Inverters with Constrained Switching Frequency. Energies. 2017; 10(10):1610. https://doi.org/10.3390/en10101610
Chicago/Turabian StyleNguyen-Van, Triet, Rikiya Abe, and Kenji Tanaka. 2017. "A Digital Hysteresis Current Control for Half-Bridge Inverters with Constrained Switching Frequency" Energies 10, no. 10: 1610. https://doi.org/10.3390/en10101610
APA StyleNguyen-Van, T., Abe, R., & Tanaka, K. (2017). A Digital Hysteresis Current Control for Half-Bridge Inverters with Constrained Switching Frequency. Energies, 10(10), 1610. https://doi.org/10.3390/en10101610