1. Introduction
With the increasingly severe situation of energy and environmental protection in the world, clean energy has become the focus of the research field in the new century, so the Stirling power generating system has attracted much attention. A free-piston Stirling engine [
1,
2,
3] connected with a linear motor [
4,
5,
6] converting mechanical power into electrical power, which implements thermo-mechanical-electrical energy conversions, is called a free-piston Stirling power generating system. The combination of free-piston Stirling power generating system and linear motor formulates the thermo-mechanical-electrical system [
7,
8,
9,
10], which carries forward the advantages of both. Energy conversion efficiency and the reciprocating oscillation amplitude stability of free-piston Stirling generating system are ensured by dynamic and thermodynamic research with respects to model simulation analysis, parameter optimization, and system integration debugging. Amplitude and frequency stability of free-piston generating system is difficult to realize in practical work, and the unstable characteristic caused by the variation of output load is inevitable. Effective control strategy is studied to improve the robustness of the generating system to meet the demands of the generating process and improve the stability of the output current of free-piston Stirling generating system [
11,
12,
13,
14].
Scott S Gerber proposed a hierarchical control scheme for the Stirling power generation system, which is divided into three layers: energy management layer, air fuel ratio control layer, and linear motor trajectory control layer [
15]. Pavel Němeček and his fellows in Czech Technical University proposed a double stroke Stirling generating system scheme, adopting new type circuit to achieve energy conversion to realize steady control under generating state [
16]. The control method proposed by American scholar Raymond L Kirby combines the characteristic of output stroke and load, which is able to control fuel consumption by controlling the output of current [
17]. The Monrovia company Zaher Daboussi proposed a linear motor rotor position detection method of Stirling power system, preventing over stroke by controlling the displacement of free-piston via the back electromotive force (EMF) [
18]. However, the estimation of phase and voltage lends to negative effects on control accuracy.
Steady control of free-piston Stirling power generating system under the variation of out load is a study emphasis of this paper. With the benefits of simple structure and easy realization, current-stroke and current-voltage double closed-loop control strategies [
19,
20,
21,
22] are employed in traditional free-piston power generating system, which ignored the
d-q axis current coupling problem. Current feedback decoupling control strategy is investigated to realize the
d-q axis current full coupling of motor control system. The influence of
d-q axis decoupled state current is studied with respect to the output voltage adjusting time and fluctuation amplitude under the variations of piston displacement and output load. Simulation results show improved results compared with the initial double closed loop control. With regard to the dynamic regulation lag in the decoupled current caused by system parameter variations, an internal model control based on sliding mode IMC-SM is proposed, which improves the performance of the decoupled-state feedback current control that relies on system parameter accuracy, and further reduces output voltage ripple in generating mode by simulation comparison and analysis.
2. Free-Piston Stirling Power Generating System Model
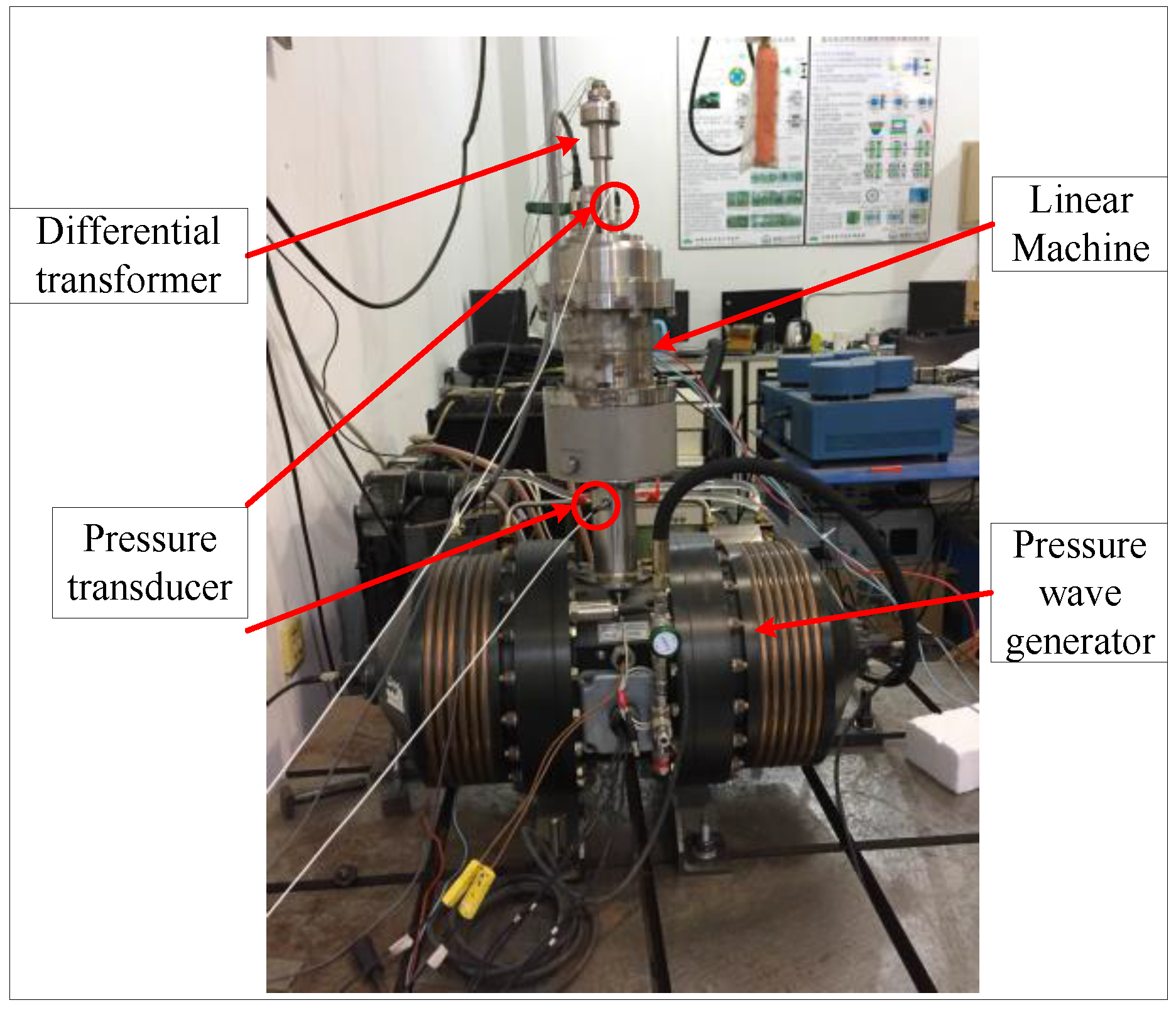
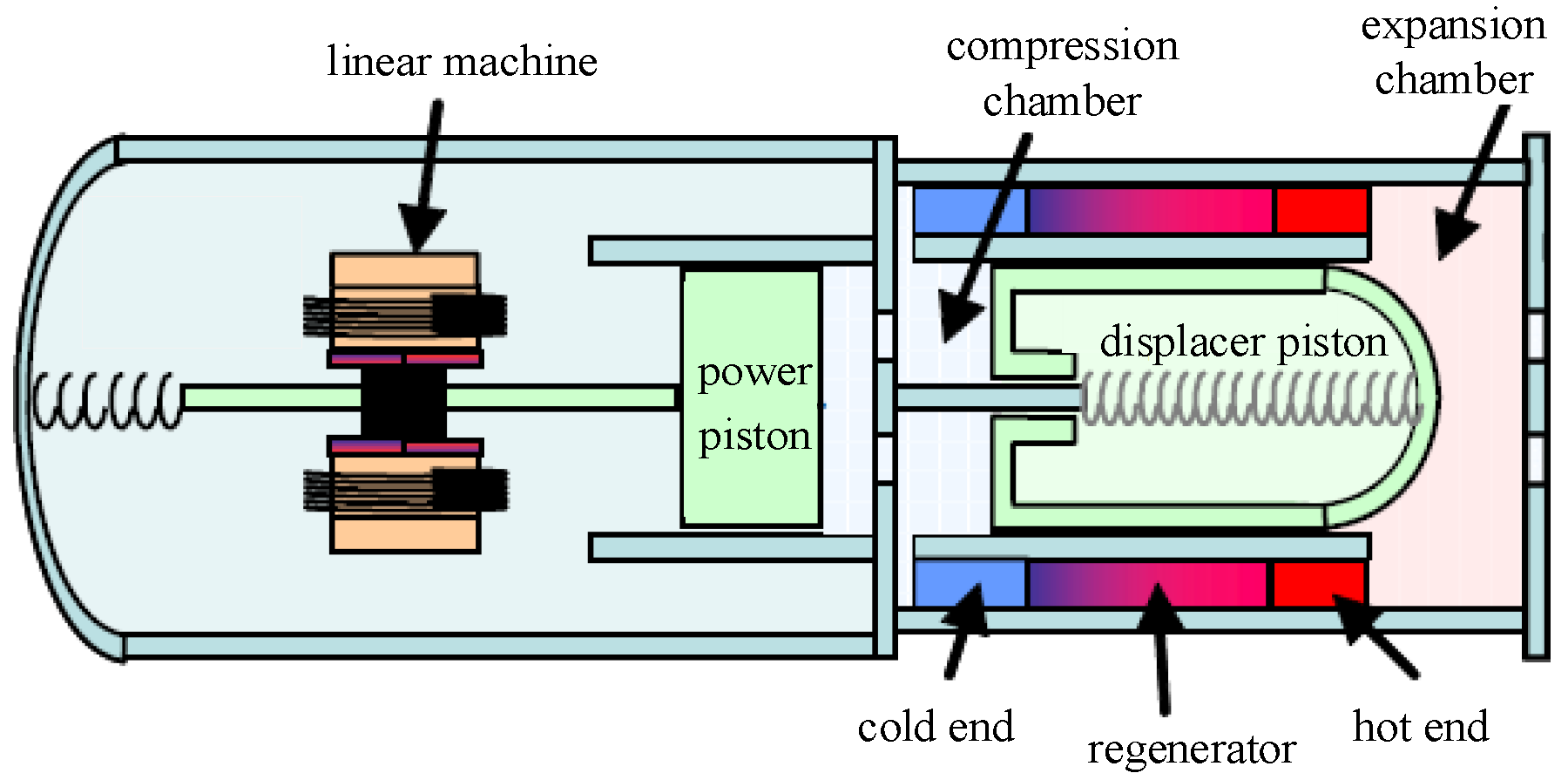
Free-piston Stirling power generating system is a two-degree-of-freedom vibration system working in resonant state, and is composed of free-piston thermal cycle power system and cylindrical permanent synchronous linear motor power generating system that works in interrelated and mutual influenced condition. The structure of free-piston Stirling power generating system shown in
Figure 1 is a two-degree-of-freedom mass-stiffness-damping system (generally considered to be fixed housing) [
23,
24]. Main factors affecting the stability of the system are stiffness of air spring, regenerator damping, piston phase position, motion frequency, hot and cold cavity volume and structure. Kinetics research of Stirling generating motor starts with the foundation of preliminary mathematical model, with respect to its structure parameters and performance characteristics, to form the preliminary design criteria of the system by characteristic simulation analysis of the model.
The starting process of free-piston Stirling power generation system is: at the initial stage, the moving parts are in equilibrium and at rest. With the temperature of the hot end rising, expansion chamber gas pressure
increases, leading to
, and it can be seen in
Figure 1 that displacer piston and power piston move left. The acceleration of displacer piston is much greater than power piston, the mass of whom is several times that of displacer piston, leading to the volume of cold cavity between power piston and displacer piston decreases, and the gas pressure also rises on account of gas flew from cold cavity to hot cavity. In the reverse (right) motion, the acceleration of displacer piston is much greater than power piston, which leads to gas flowing from hot cavity to cold cavity and further causes the decrease of gas pressure. The piston moves in cycles back to the equilibrium position after certain distance away caused by the existence of elastic force, and the system achieves dynamic balance in the starting process.
The free-piston Stirling power generating system consists of motor housing, displacer piston and power piston. The mass of displacer piston and power piston is much less compared with motor housing, thus the movement of displacer piston and power piston is the main consideration while the movement of the housing can be neglected. The pressure difference between the two ends of the piston forms the force acting on the piston, the dynamic equation of which is obtained according to Newton’s second law (taking the equilibrium position as zero point, and right as the forward direction):
Similarly, the dynamic equation of power piston is (taking the equilibrium position as zero point, and right as the forward direction):
represent gas pressure of spring chamber, buffer chamber, compression chamber and expansion chamber, respectively.
are the cross-sectional area of power piston, displacer piston and the rod in the center of displacer, respectively.
, are the mass of power piston and displacer piston, respectively.
Equations (1) and (2) are dynamic equations coupled with thermodynamics and dynamics.
is electromagnetic thrust for permanent magnet synchronous linear motor [
25] expressed by the equation below:
are electromagnetic thrust and mechanical force, respectively; and is mover mass.
The inductance of
d-q axis is considered to be approximately equal to simplify the analysis, and the equation of electromagnetic thrust is:
Electromagnetic thrust control is realized by adjusting the current (expressed by ) of q axis, which is linear dependent with electromagnetic thrust when the linear motor works at rated thrust.
When the hot end and the cold end are controlled by constant temperature difference, the relationship equation of the output power and thrust of free-piston Stirling motor are:
is linear motor output power, is the average pressure of working gas in Stirling power generation system, is the amplitude of displacer piston, is the temperature ratio of hot end and cold end, and are power ratio and equivalent damping coefficient, respectively.
Parameters and are definite values in Stirling power generating system design. The amplitude of displacer piston is controlled by stroke controller to derive power matching of motor and the load.
3. Control Strategy of Free-Piston Stirling Power Generating Motor
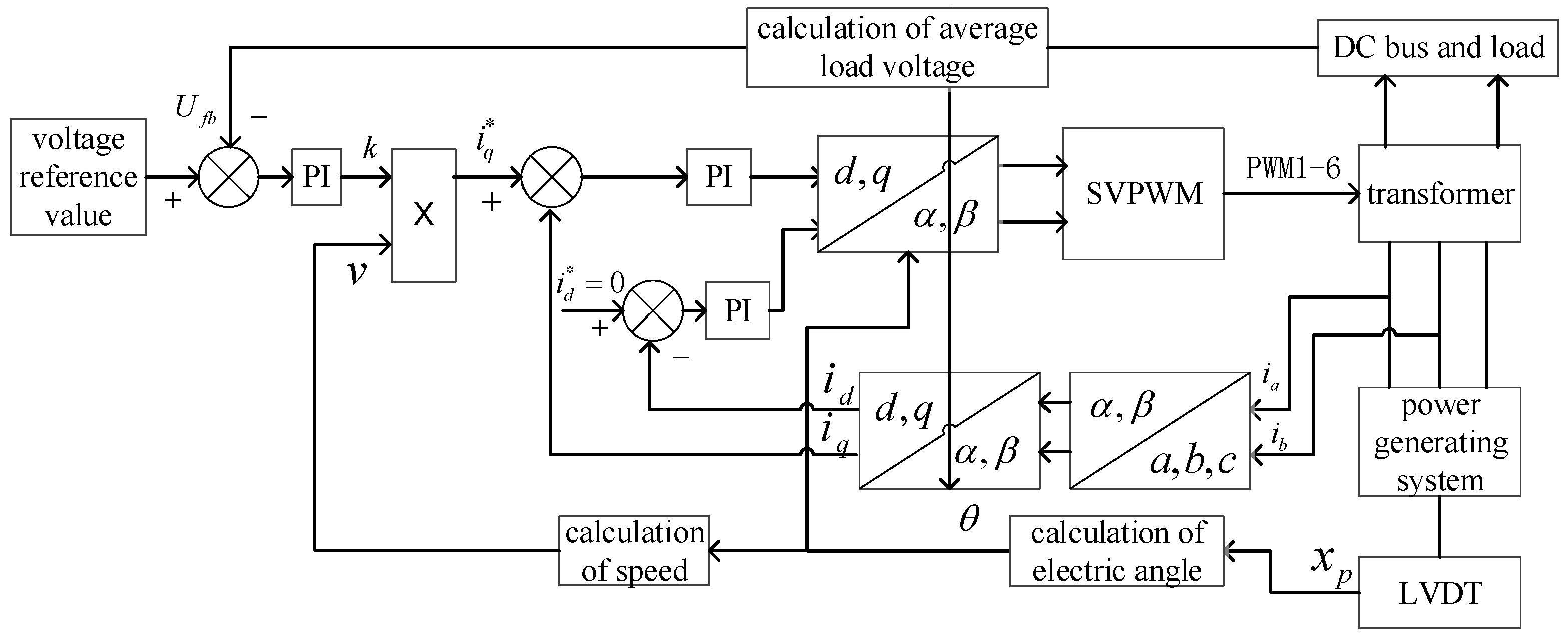
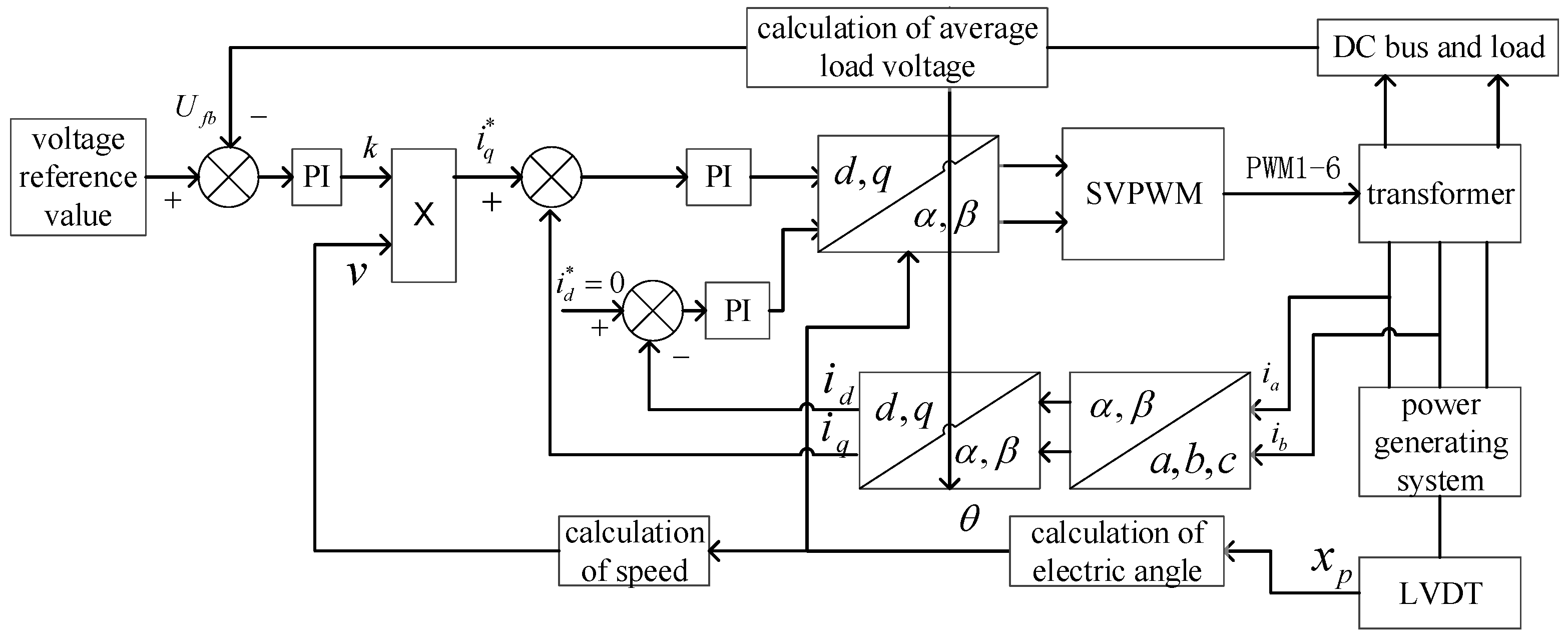
3.1. Double Closed-Loop Generation System Control Strategy
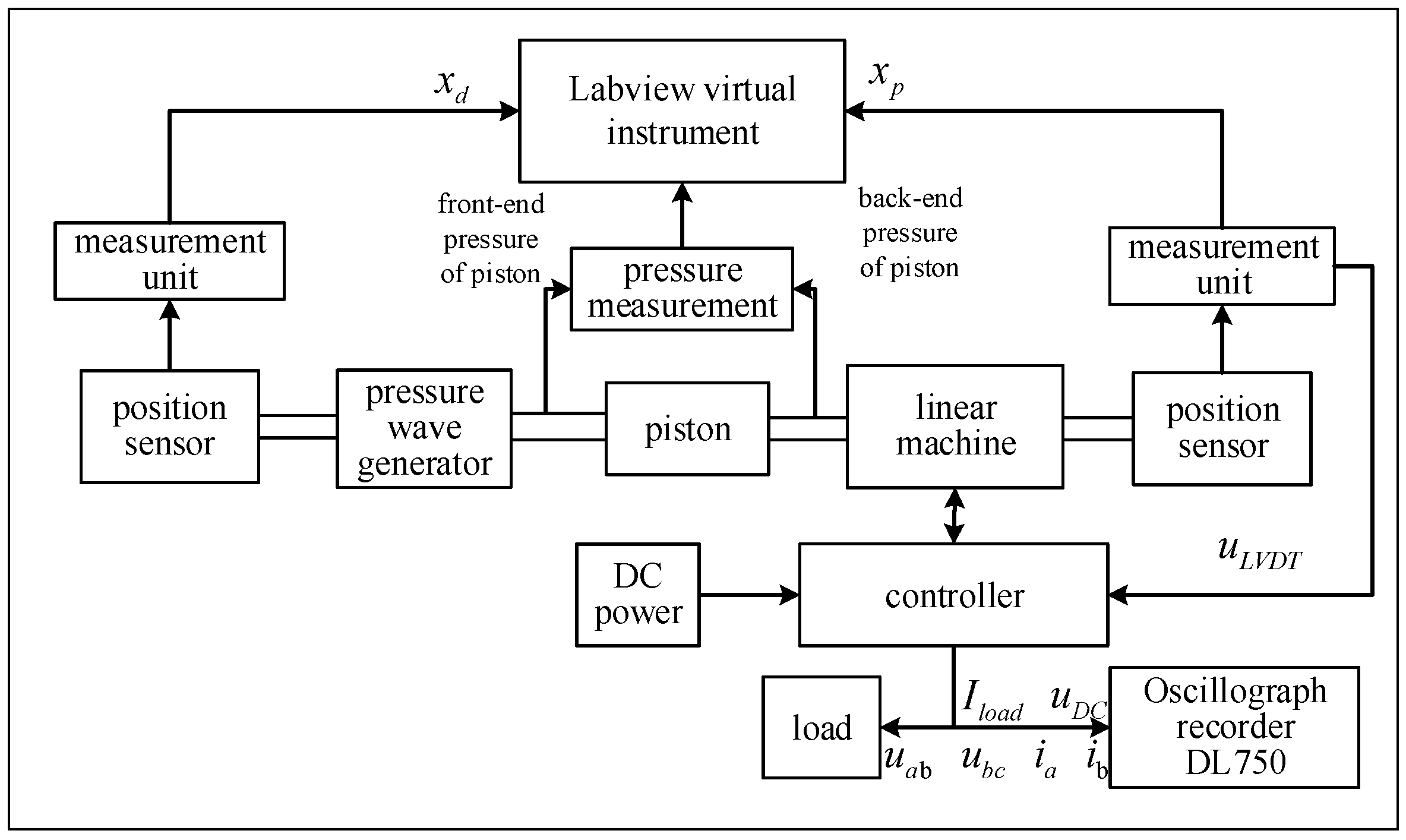
The double closed-loop generation system control strategy shown in
Figure 2 is a traditional and fundamental strategy which is widely adopted nowadays. Current input reference value is composed of speed correlative and position correlative, and the output
k of voltage controller is modulation index. When the engine starts from rest, fixed thrust of the motor deviates the piston from equilibrium position firstly, then it releases, which starts the oscillation process. The voltage reference value
is greater than voltage feedback value
, and the output of voltage controller (i.e., motor thrust coefficient)
k is positive, and the direction of
is the same with piston velocity, thus the output thrust of the motor is positive, which increases the motion amplitude of the piston and the feedback of motor in electric state. When the piston oscillation amplitude amounts to a certain value, voltage feedback value becomes greater than reference value,
k decreases to negative, and the direction of
becomes opposite to piston velocity. When output damping emerges, the motor works in generation mode, and motor thrust coefficient
k varies with feedback voltage: the rise of
k causes the thrust of motor increasing when voltage is low, thus the voltage rises on account of the increase of piston amplitude and output power. The decrease of
k causes the thrust of motor reducing when voltage is high, thus the voltage reduces due to the decrease of piston amplitude and output power. In the stroke adjustment process, when the power generated is greater than require, the excess energy is released to the energy storage capacitor and leak resistor, otherwise energy storage capacitor provides energy to the load.
3.2. Control Strategy Based on Decoupling of Current Feedback
Output voltage adjusting time, the voltage (power) fluctuation amplitude, the following performance of
d-
q axis current under the variation of piston displacement, output voltage ripple and load need to be improved.
is adopted in traditional vector control strategy, and PI regulator controls
d-q axis current feedback. The traditional method is easy to implement, but the current coupling problem is neglected. To improve the dynamic and the static performance, the current feedback decoupling control strategy is studied. In current feedback decoupling control strategy. Through the
d-q axis feedback current, the speed input to the feedback decoupling unit, the decoupling of
d-
q current loop [
26,
27,
28] is realized. The
d-
q axis voltage equation of permanent synchronous linear generator is:
are stator voltage components of d-q axis; are stator current components of d-q axis; are back EMF components, and , ; are inductance components, is permanent magnet flux; is mover velocity of linear motor; is motor wire-wound resistor; and is pole pitch of linear motor.
According to the equation above, d-q axis is coupled when PI control strategy is adopted, in order to counteract back EMF output voltage and control current of d-q axis, adjusting time is prolonged and the performance of generating system is affected.
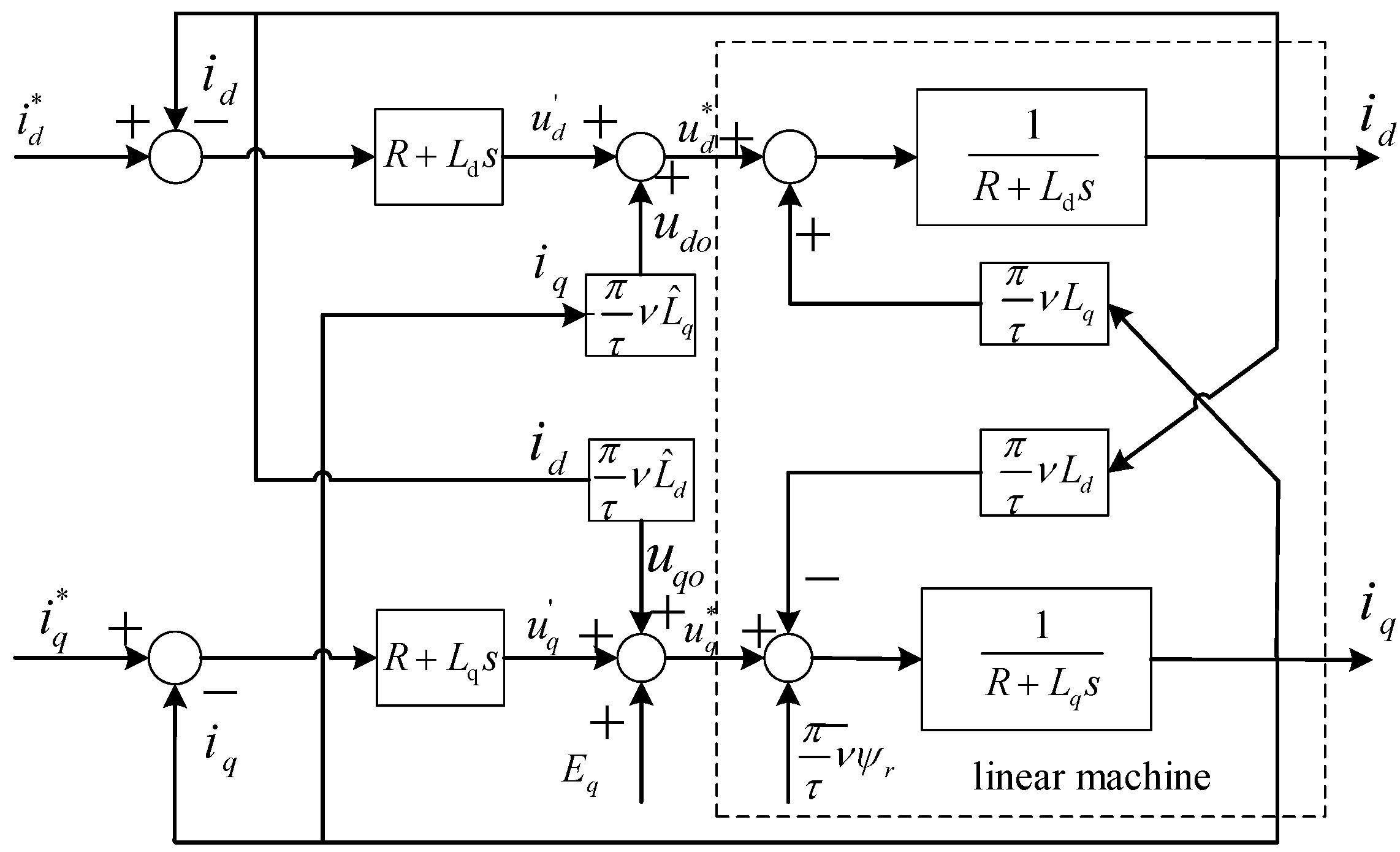
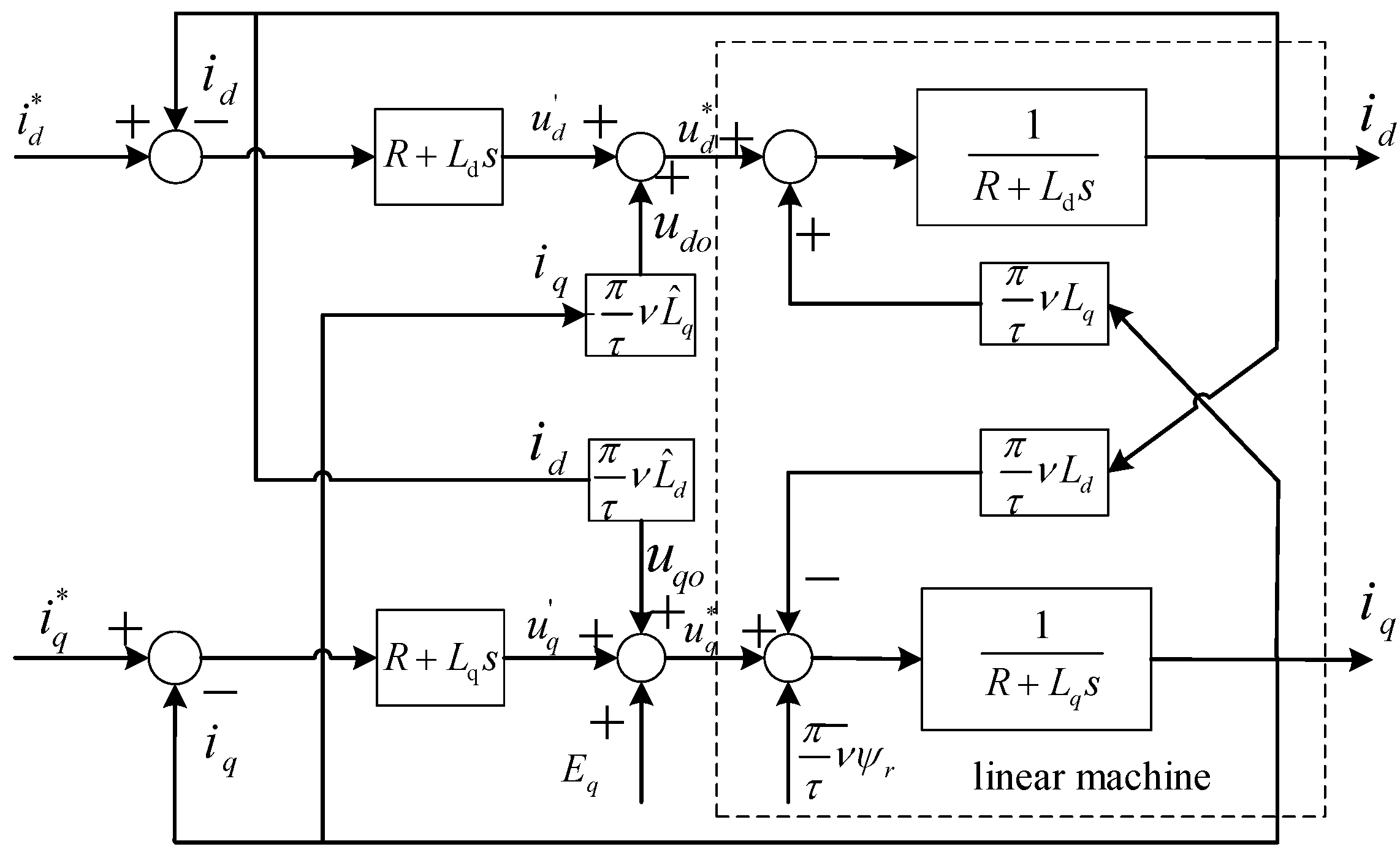
Current feedback decoupling control strategy is shown in
Figure 3. If
d-q axis realizes full decoupling, then:
udo,
uqo are voltage compensation rates of
d-q axis;
is
q-axis back EMF compensation term; and
are the estimated values of
.
If
, then voltage equation of the current regulator
d-q axis is shown in Equation (11). With
d-q axis seen as two separate linear subsystems, full decoupling controlled is realized.
The d-q axis magnitude of current of linear motor is obtained by Clark transformer and Park transformer. The value of signal is the referenced current value of q-axis, which bus voltage is passing through PI multiply by speed signal. Voltage control signal of space vector pulse width modulation (SVPWM) generator drives the three-phase half bridge, realizing the rectification control of linear motor. The dynamic performance of vector control system is improved by adding the current feedback decoupling unit.
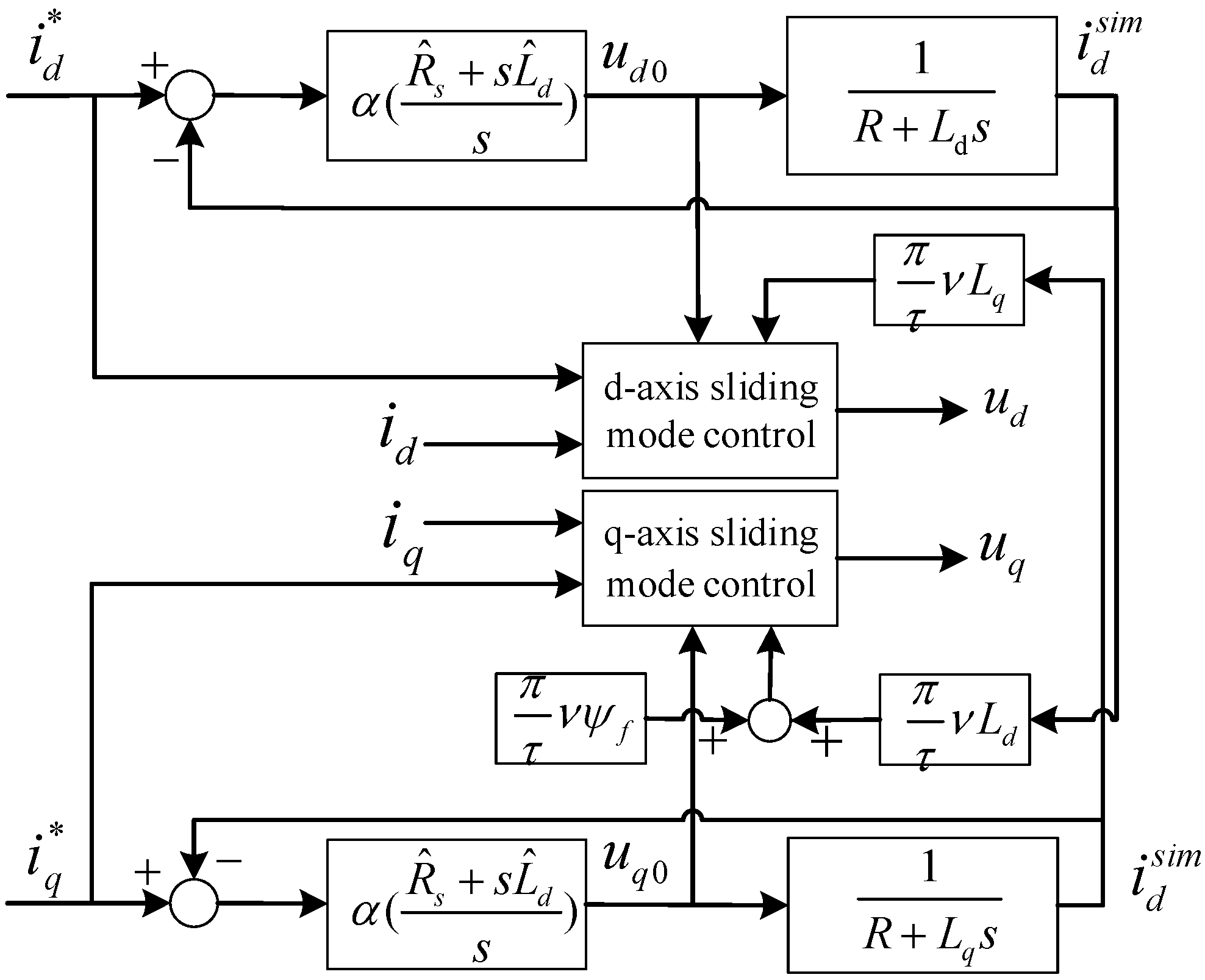
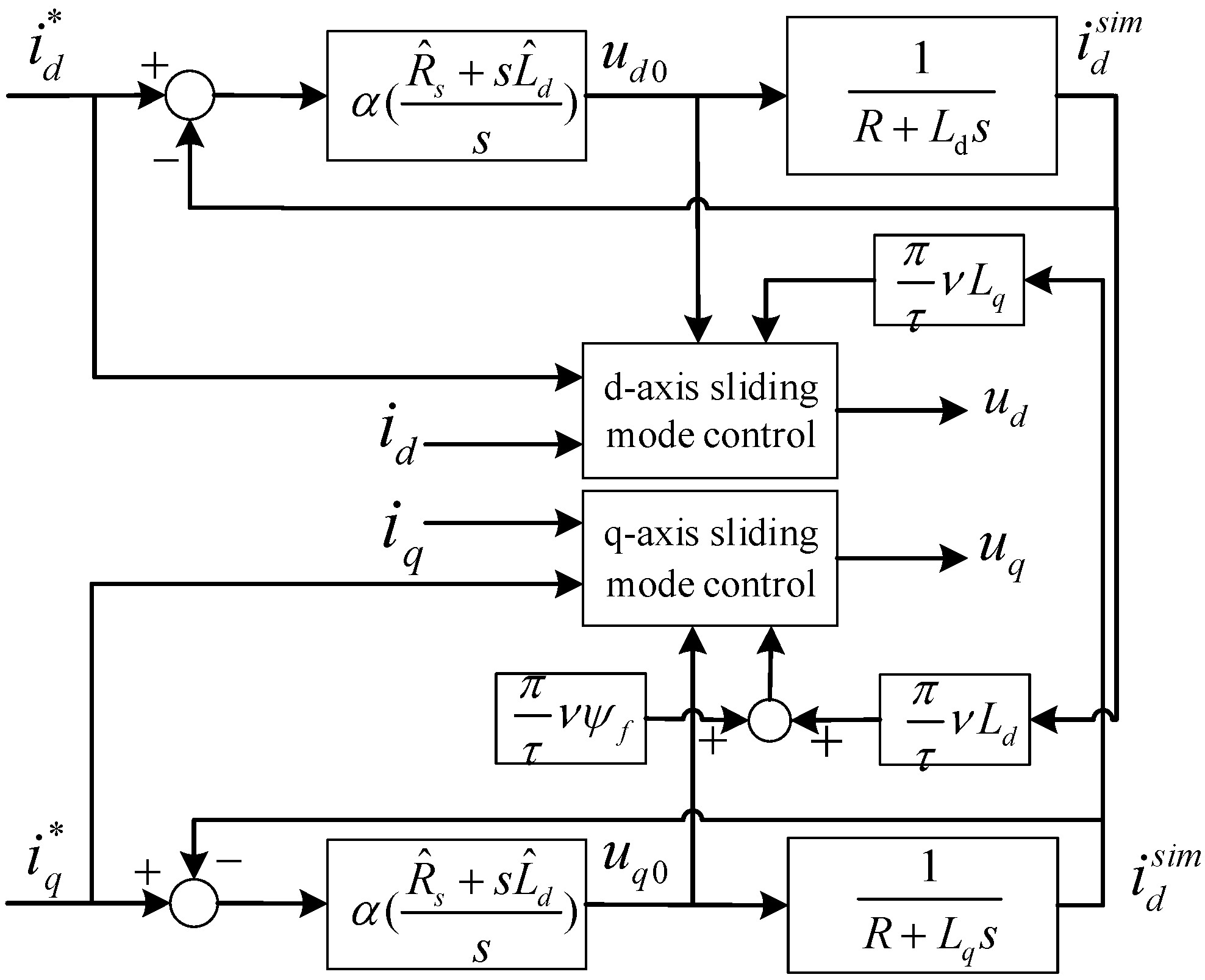
3.3. Optimal Decoupling Control Strategy Based on IMC-SM
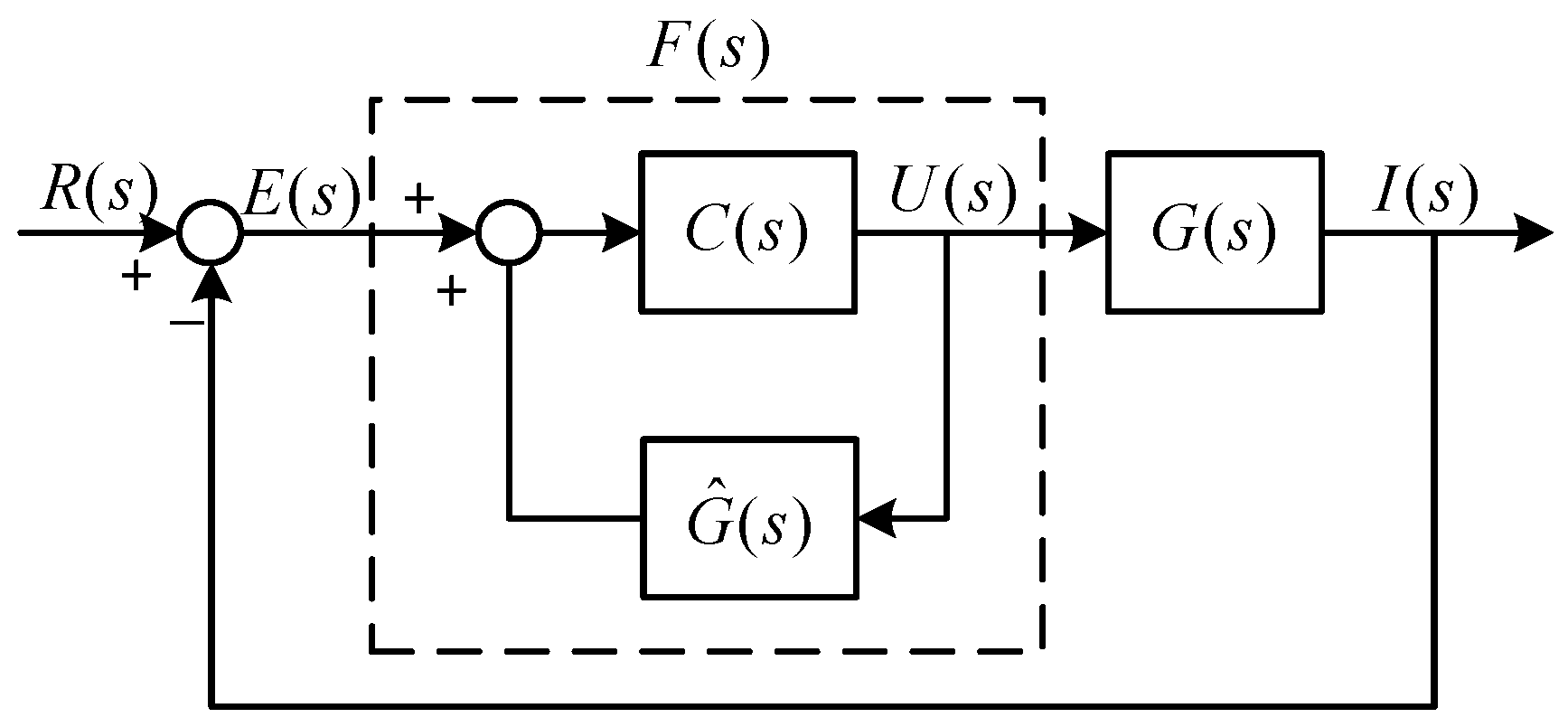
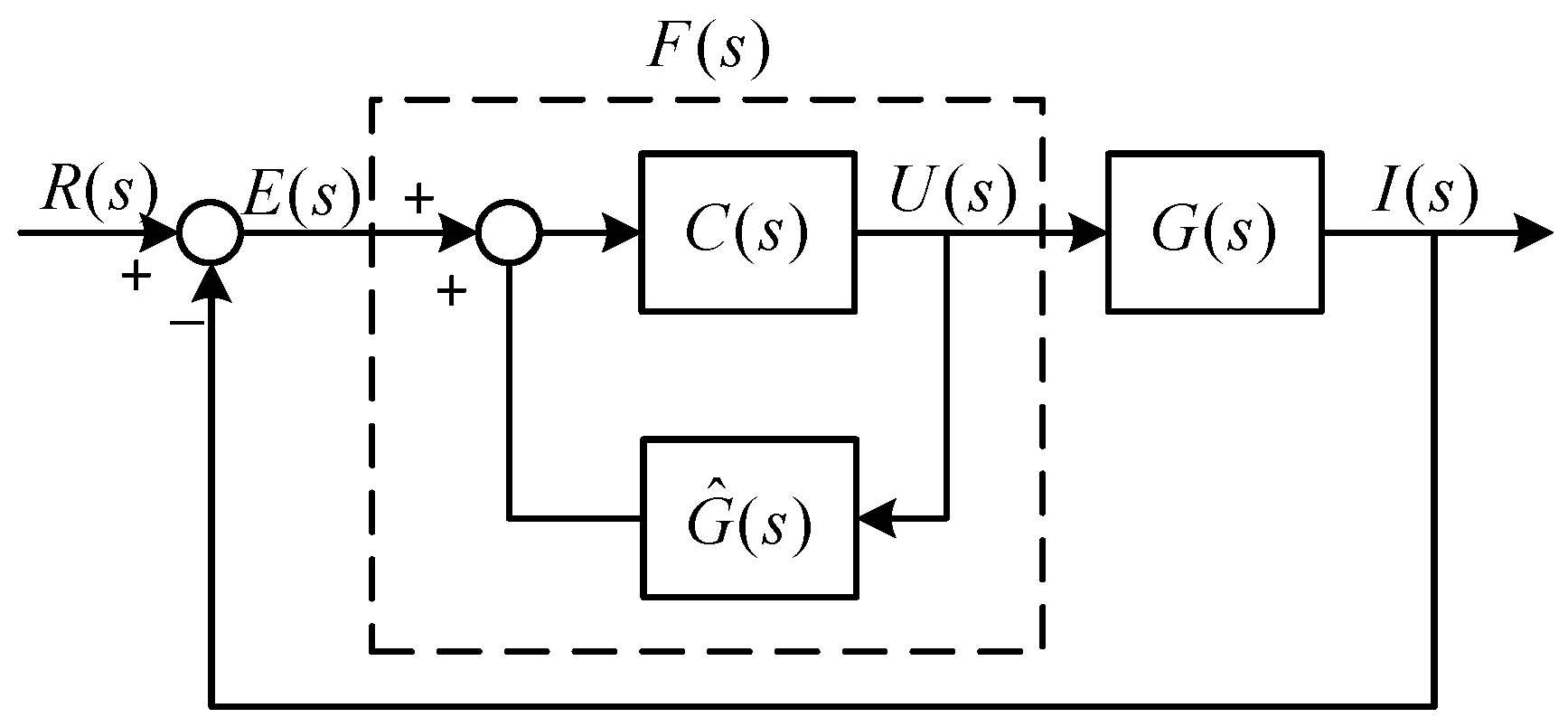
Current feedback decoupling control strategy relies on parameter estimation accuracy, because of which the error exists in parameter estimation under normal circumstances, and the motor parameters vary with stator current and motor frequency. Parameter estimation error causes compensation errors and to deviate greatly, which delays the current dynamic change of d-q axis and affects the performance of current decoupling control strategy. IMC-SM proposed in this section reduces the dependence of current decoupling on parameter accuracy and improves the quality of voltage ripple in generating mode.
Internal mode current feedback control principle is shown in
Figure 4, where internal mode is
, and controlled plant is
. Permanent magnet synchronous motor voltage and current are
and
, respectively.
is represented current.
is internal controller. Equivalent transfer function of internal control principle
is a classical controller, relating to
and
.
By Equation (11), if
d-q axis current realizes full decoupling, then
Let
,
,
. And
is a low pass filter as shown in Equation (14). Its transfer function has no zero point in the left-half plane of complex plane, which improves the robustness of the system.
and
can be written as:
Then, the transfer function becomes
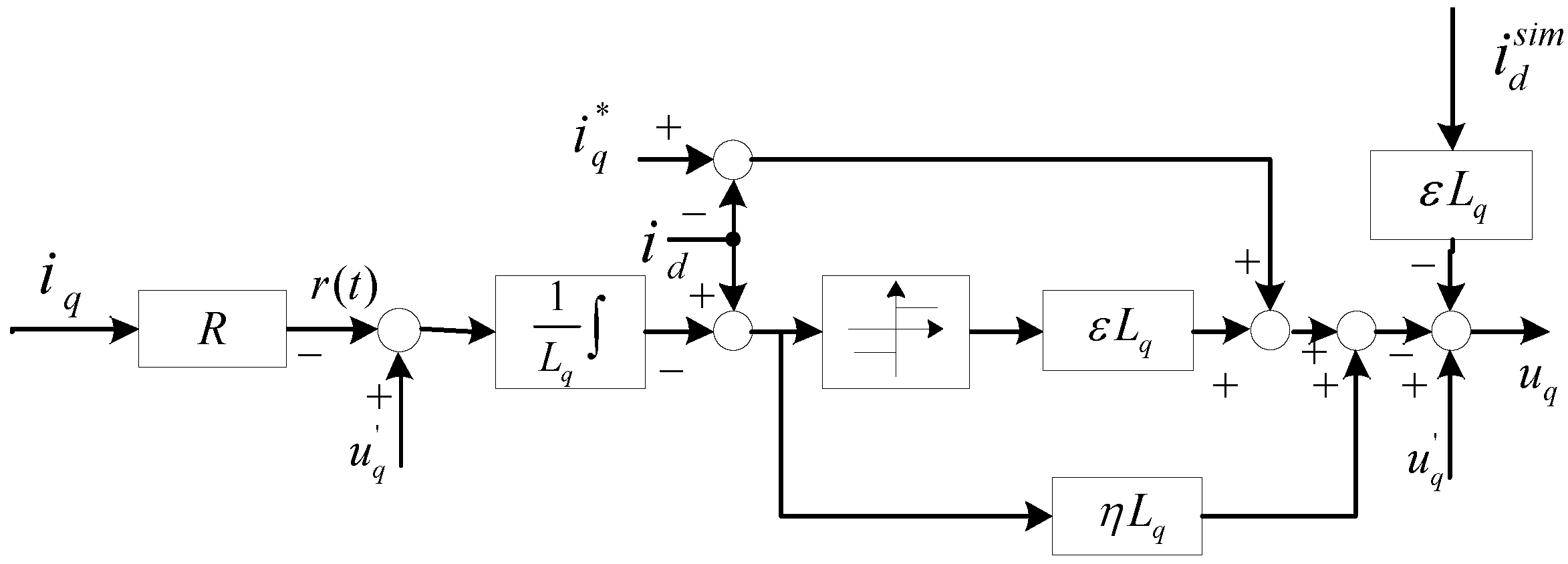
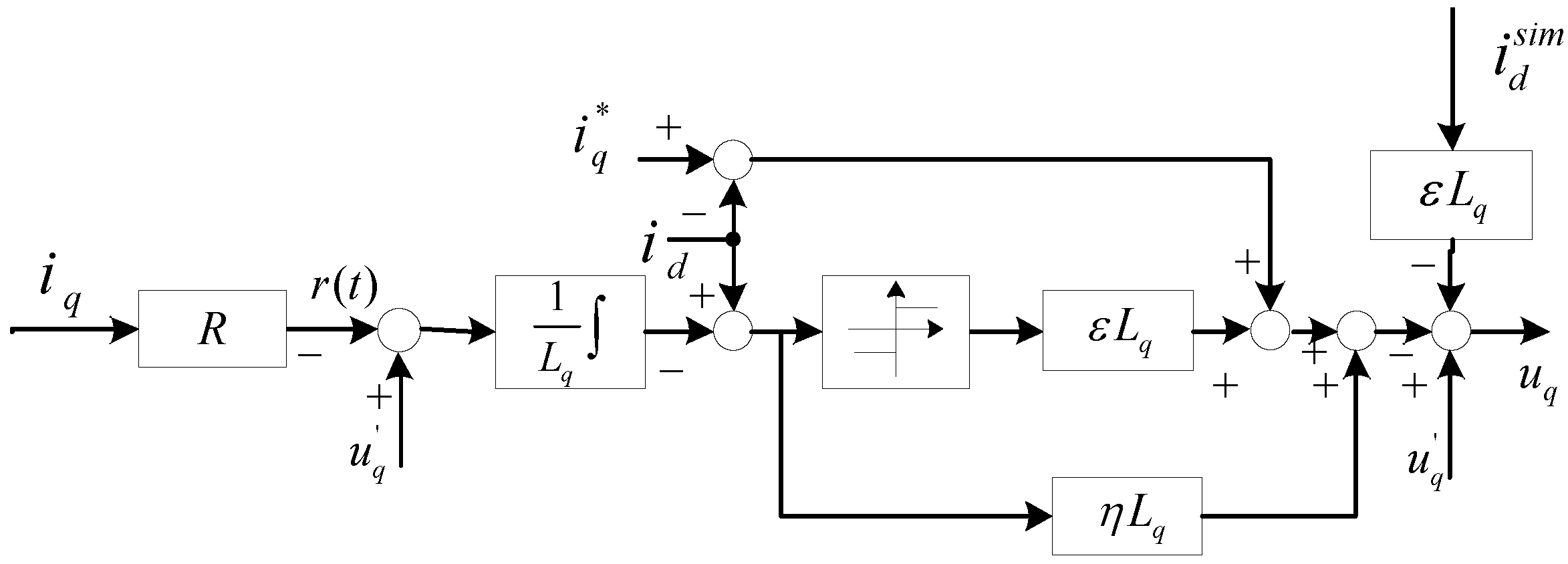
The system is affected by it in practical use; the robustness of system is promoted by importing sliding control. In sliding mode, the sliding surface of
d-q axis current is defined. Take
q-axis for example:
is the q-axis voltage of IMC.
To avoid approaching motion, the state trajectory is confined to the sliding surface to keep favorable robustness during the motion process. According to the derivation result of Equations (8) and (17) and the Lyapunov stability criterion, the following relational expression is obtained.
and
are demanded to ensure the effectiveness of sliding mode control of
q-axis and the stability of the system. Sliding mode control of
q-axis current (SMC-q) principle is shown in
Figure 5. The decoupling control strategy is shown in
Figure 6.
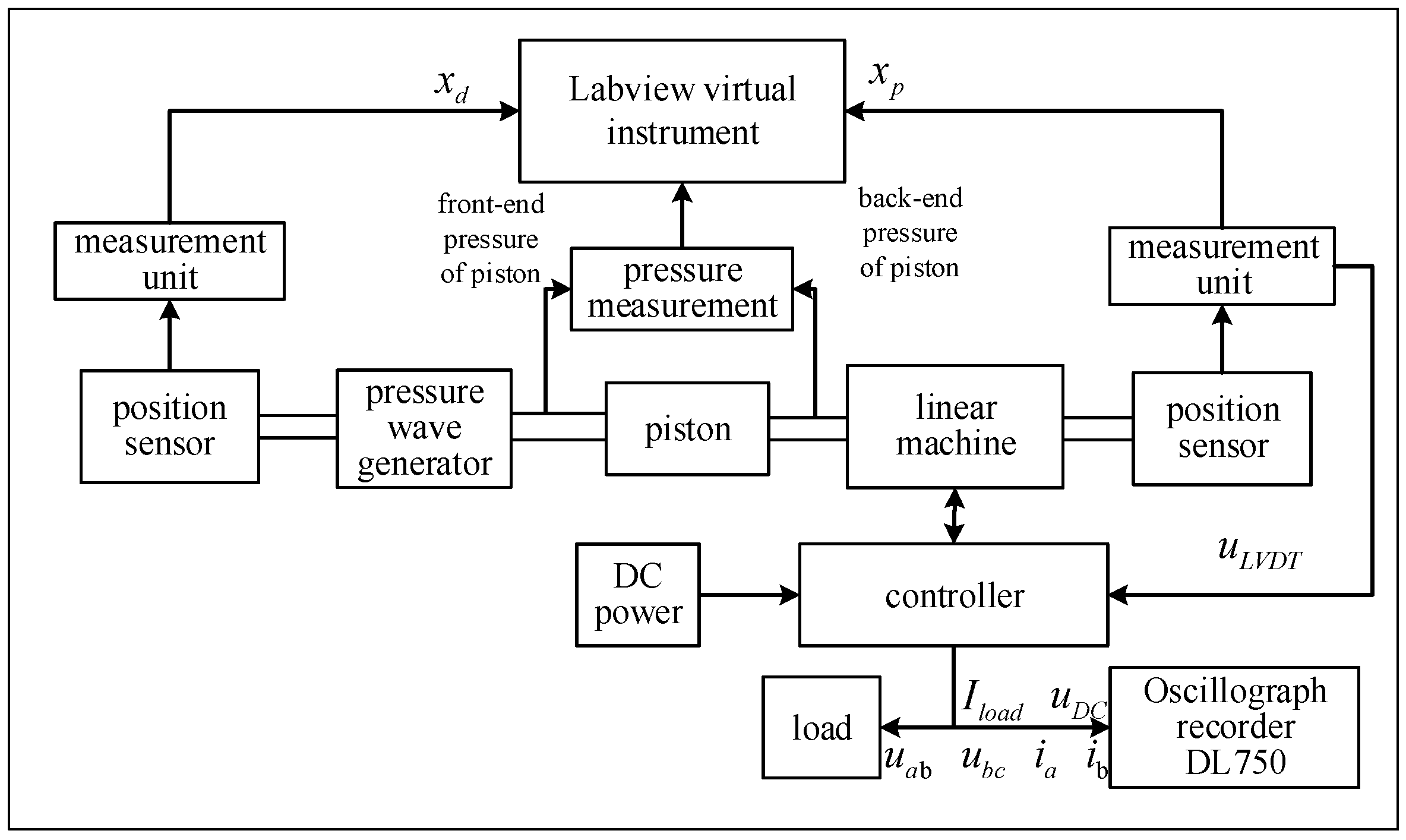
4. Simulation Research
System basic parameters shown in
Table 1 are based on model analysis of free-piston Stirling generating system. Simulation analysis on the stability problems of voltage ripple in generating mode and the voltage regulation capability with load mutation is carried out.
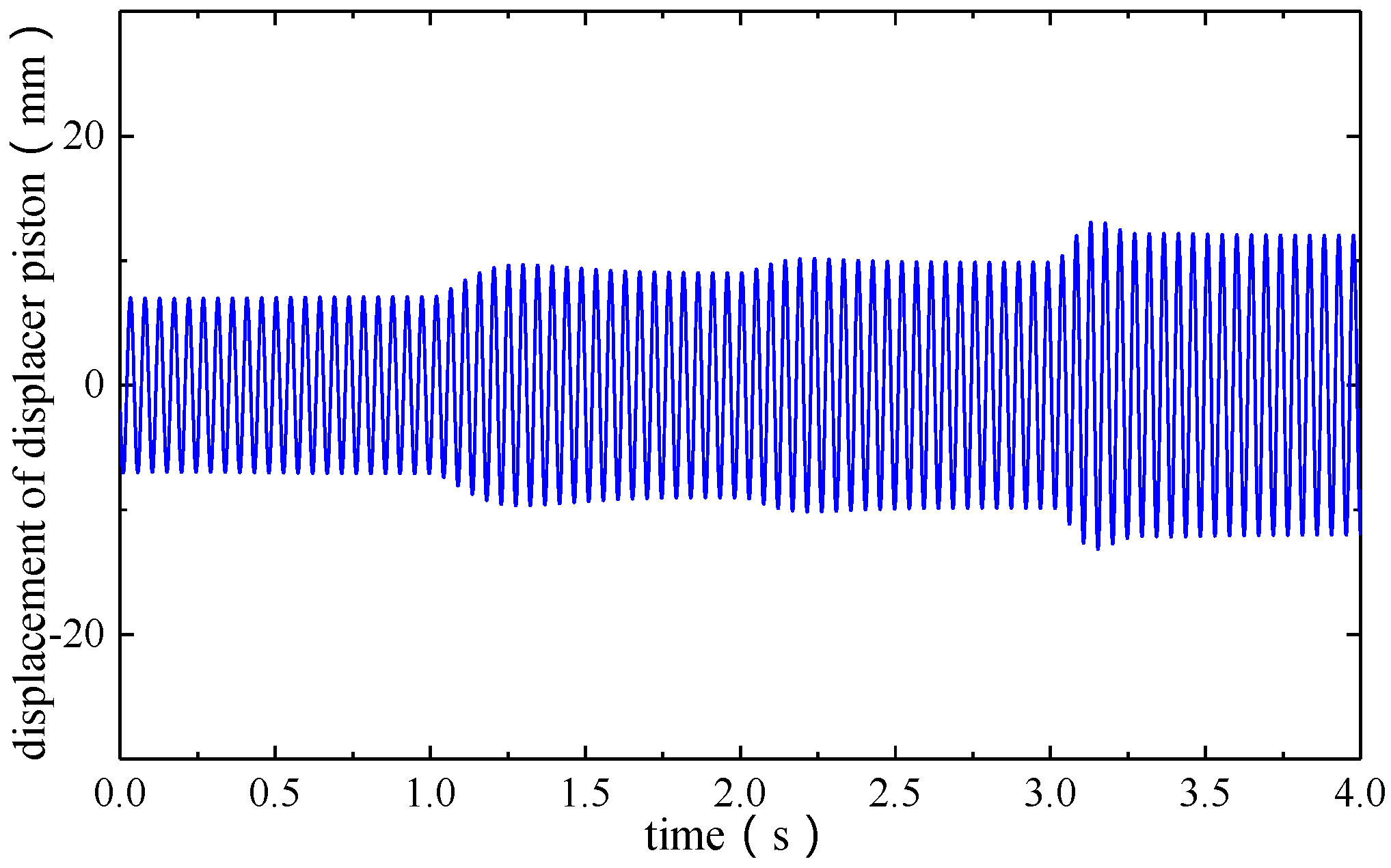
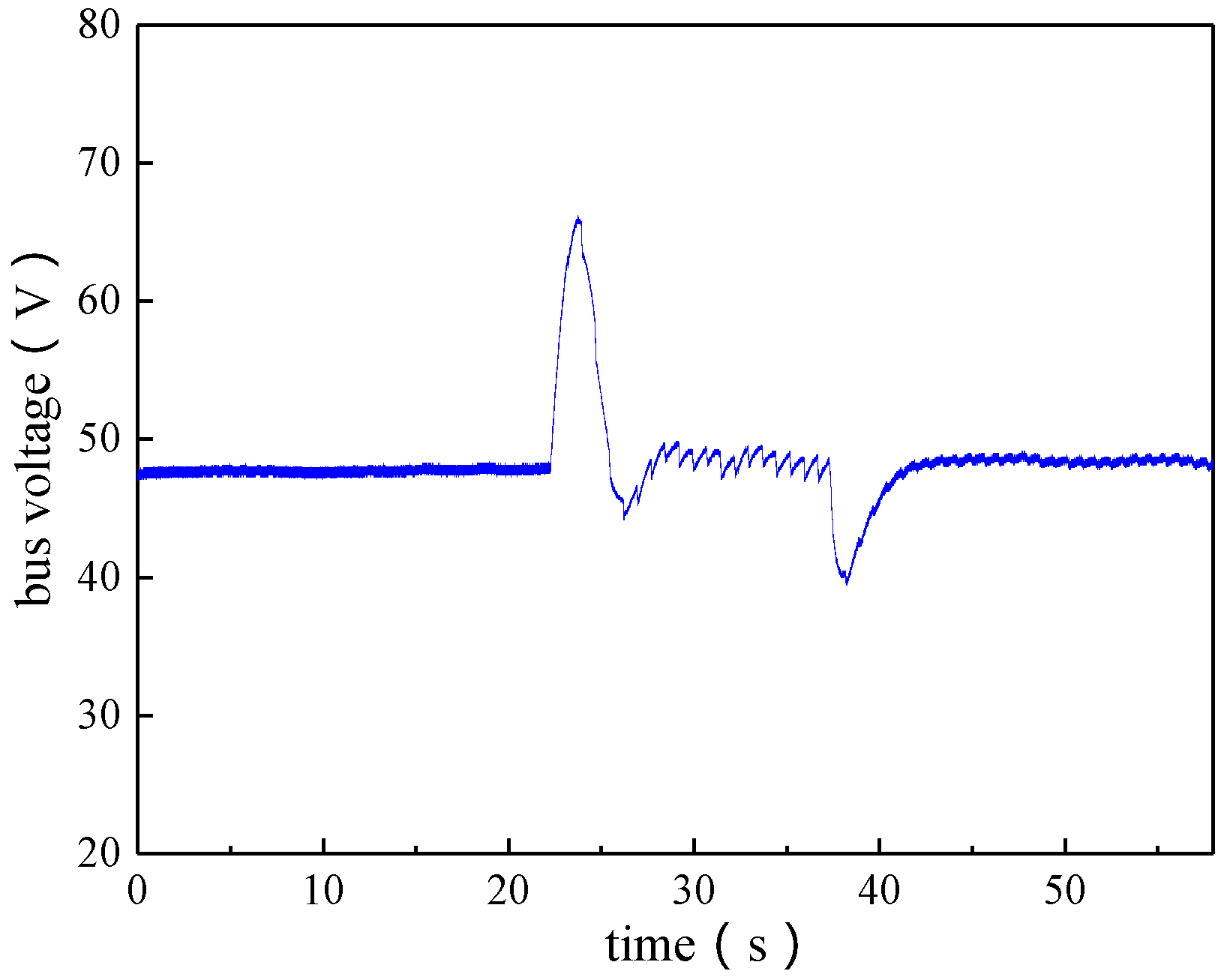
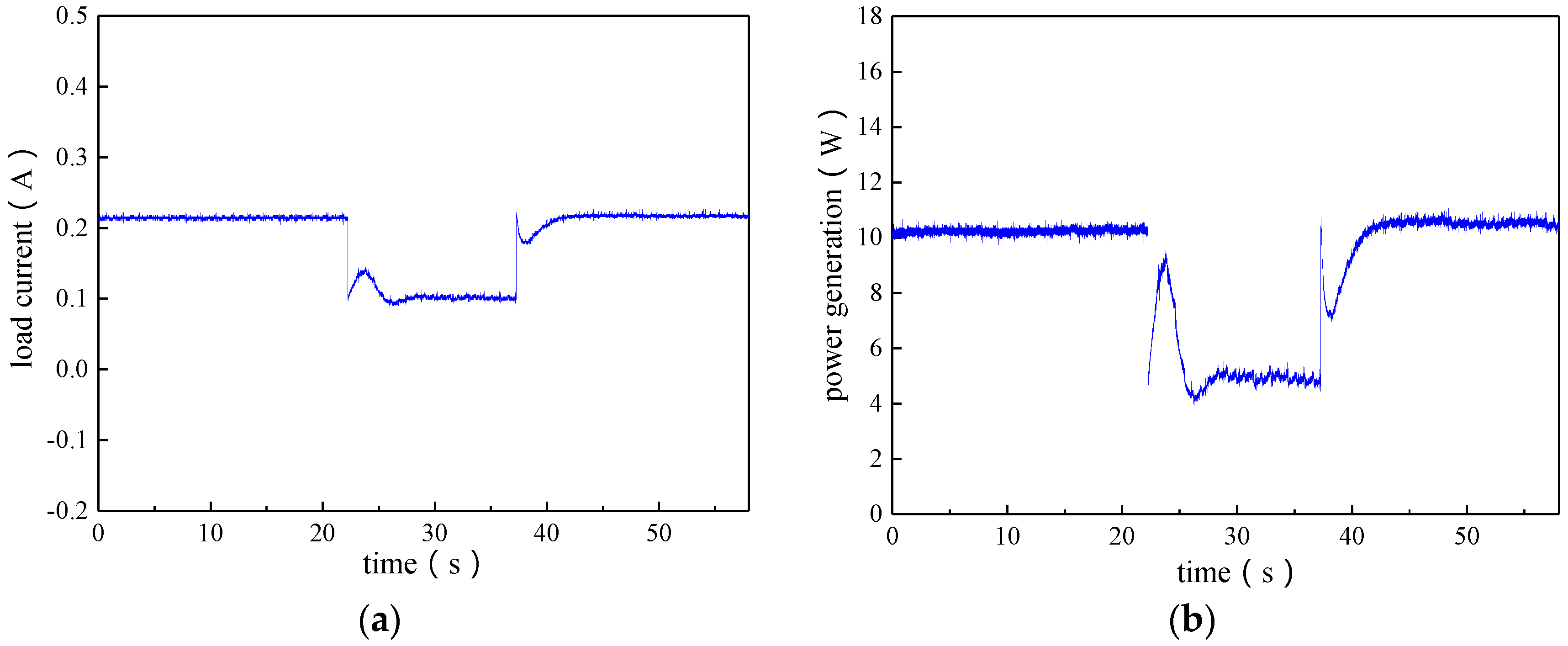
Simulation analysis on the performance of free-piston Stirling generating system control strategy is carried out. At 1 s, 2 s and 3 s, DC bus resistance loads of 150 Ω (underload), 100 Ω (rated load), 50 Ω (overload) are connected sequentially to the system, and the data of displacer amplitude, output load, current and power are observed when the load mutates. The output power of linear motor is supposed to increase in turn according to the connection sequence of the resistance loads under average DC output voltage of 100 V. Accordingly, the power range of the linear motor in generating mode is obtained.
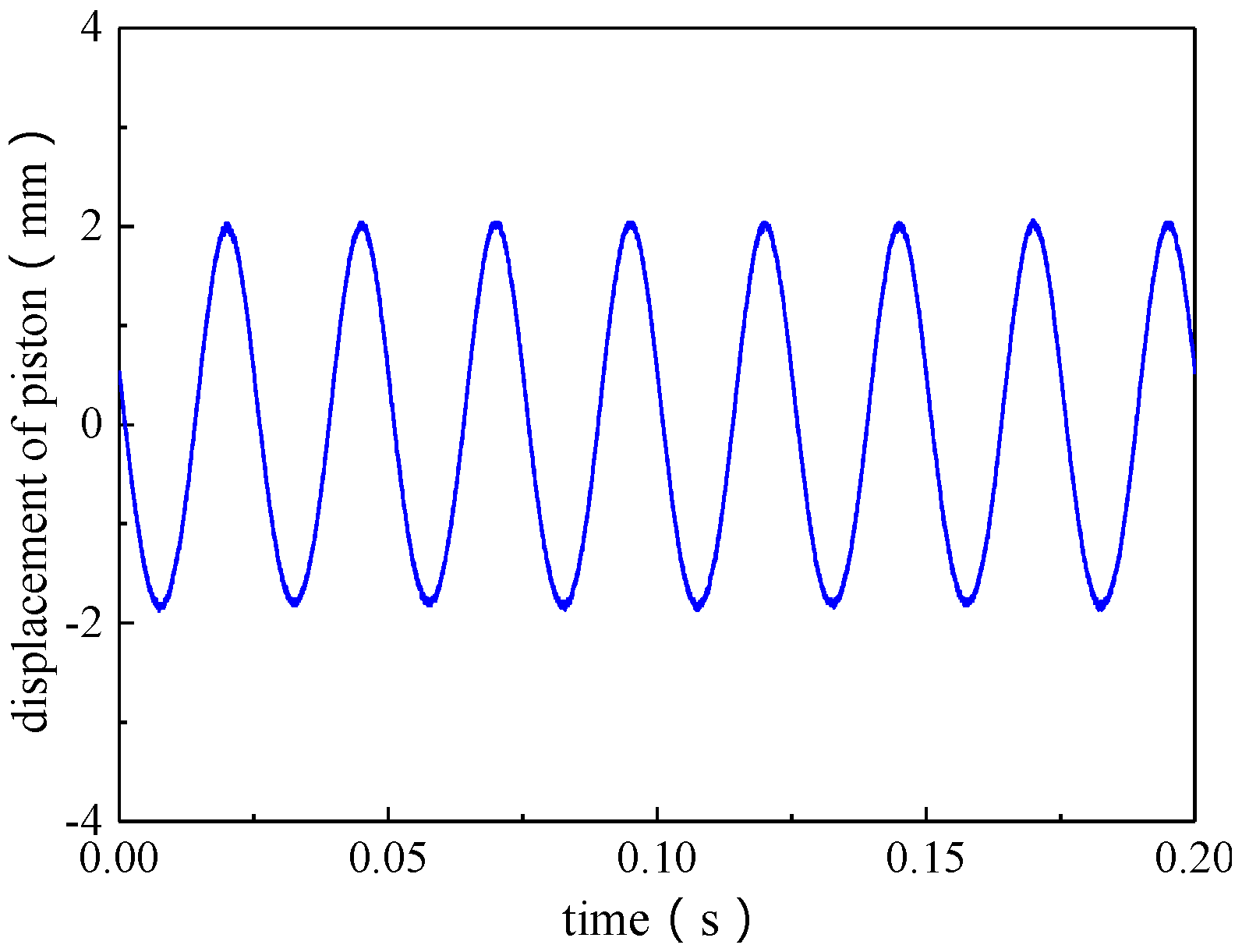
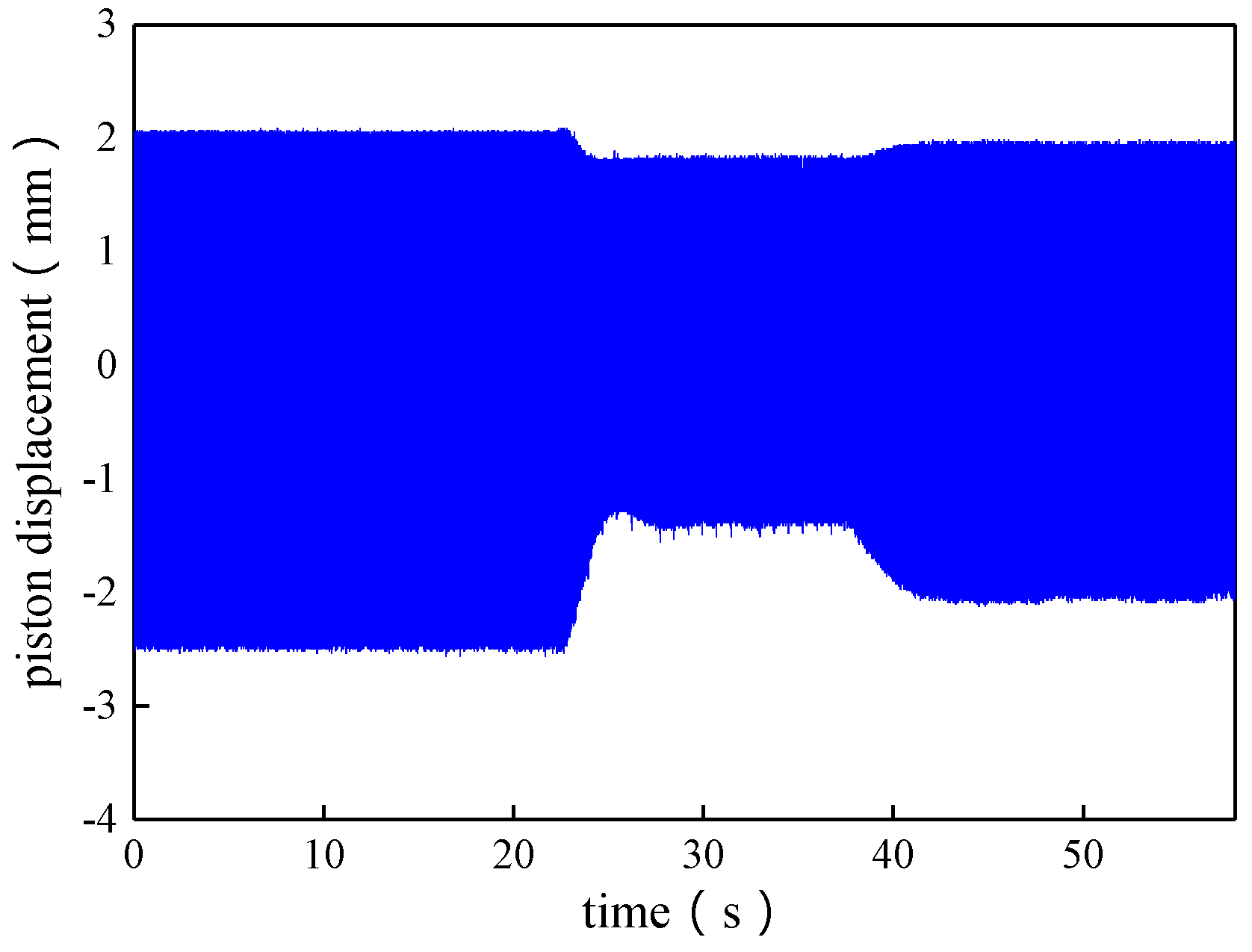
Simulated piston displacement for three different control strategies is shown in
Figure 7. From 0 s to 1 s, motor is under the state of no-load, and the piston amplitude is 7 mm. The output power of motor increases with the connection of 150 Ω resistance load at 1 s, the amplitude of piston amounts to 9 mm and remains stable in the following several strokes. The situations when 100 Ω and 50 Ω resistance loads are connected at 2 s and 3 s are similar to that at 1 s.
The simulation results of three different control strategies are compared.
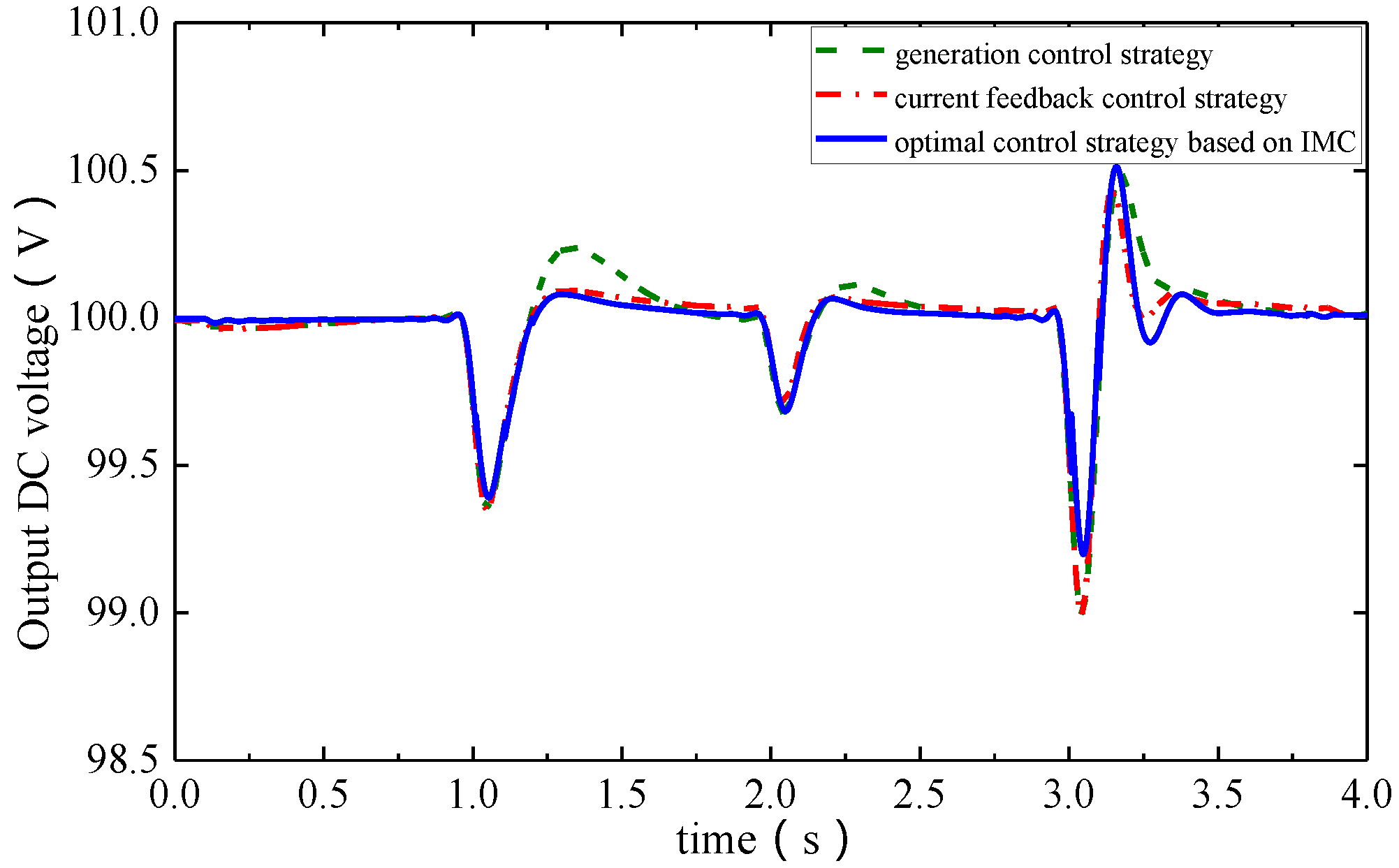
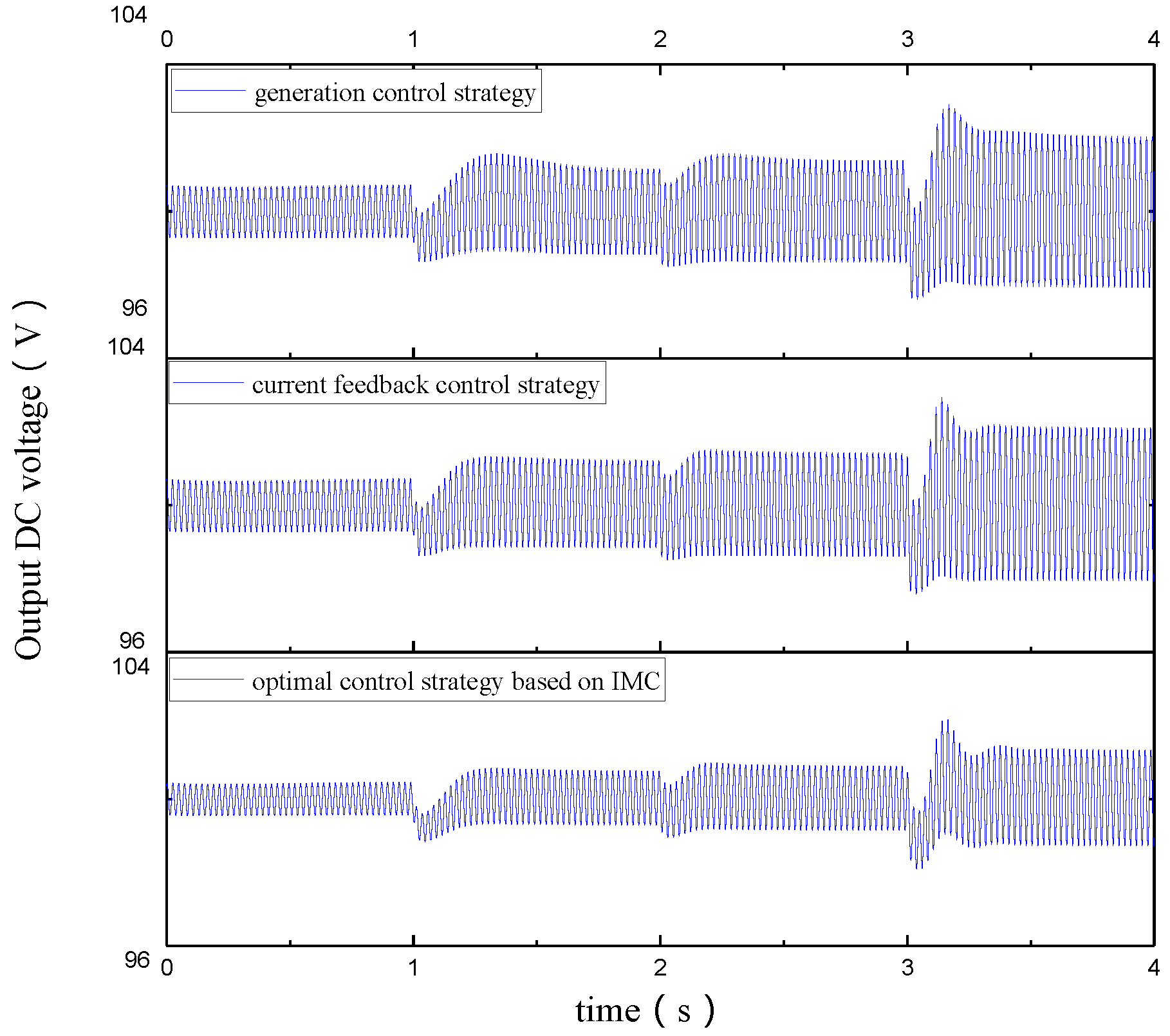
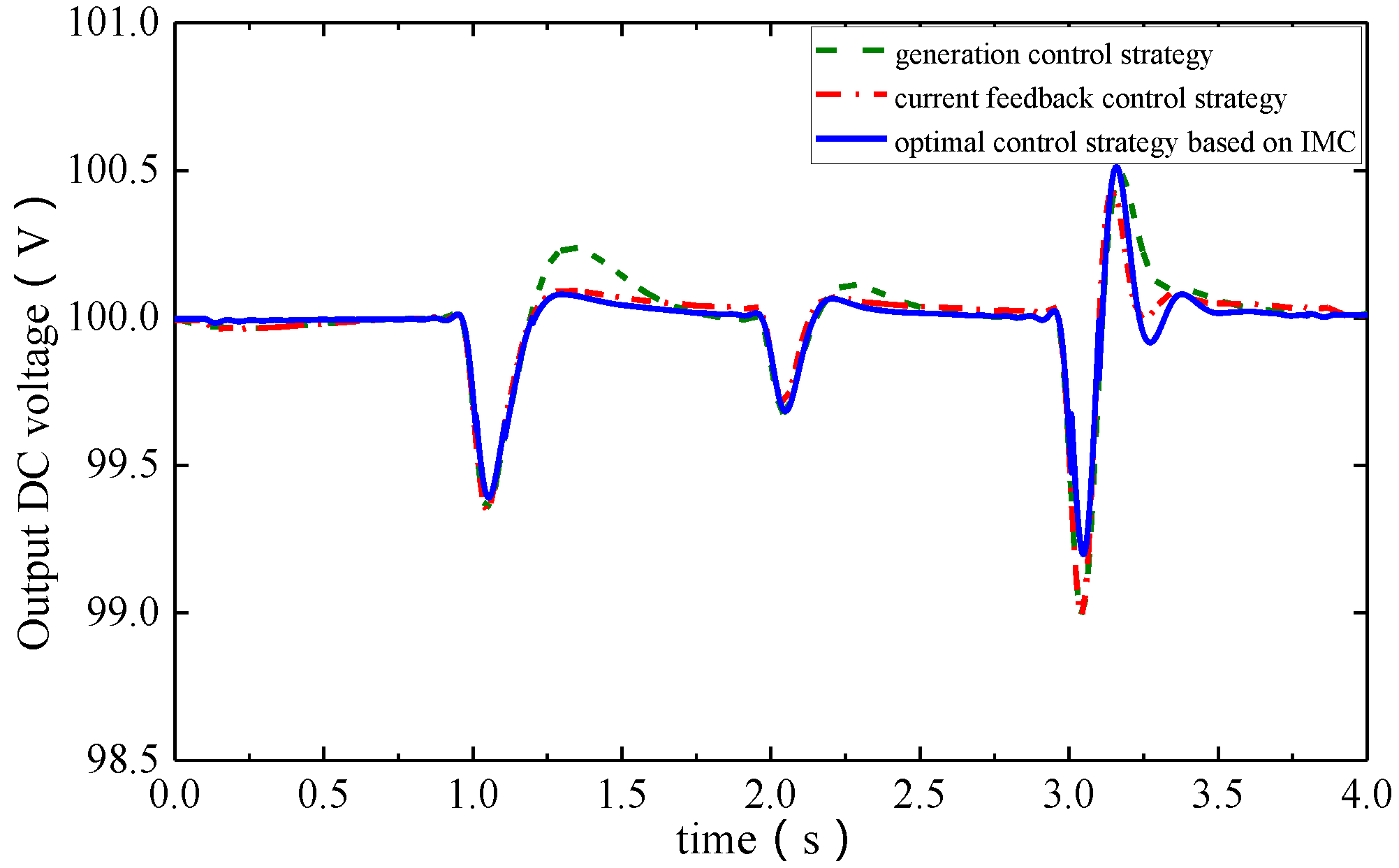
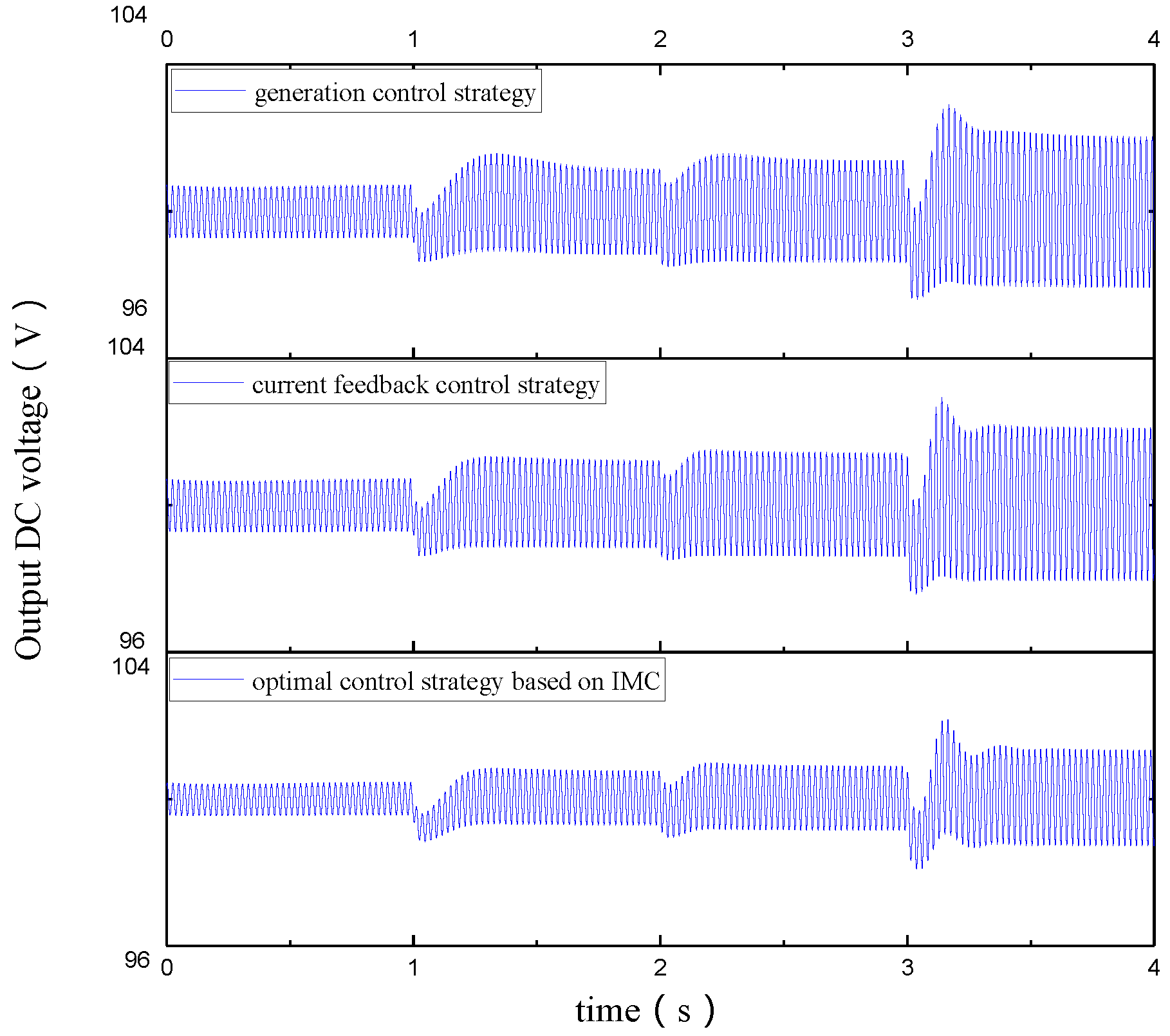
Figure 8 shows the output voltage comparison of three different control strategies.
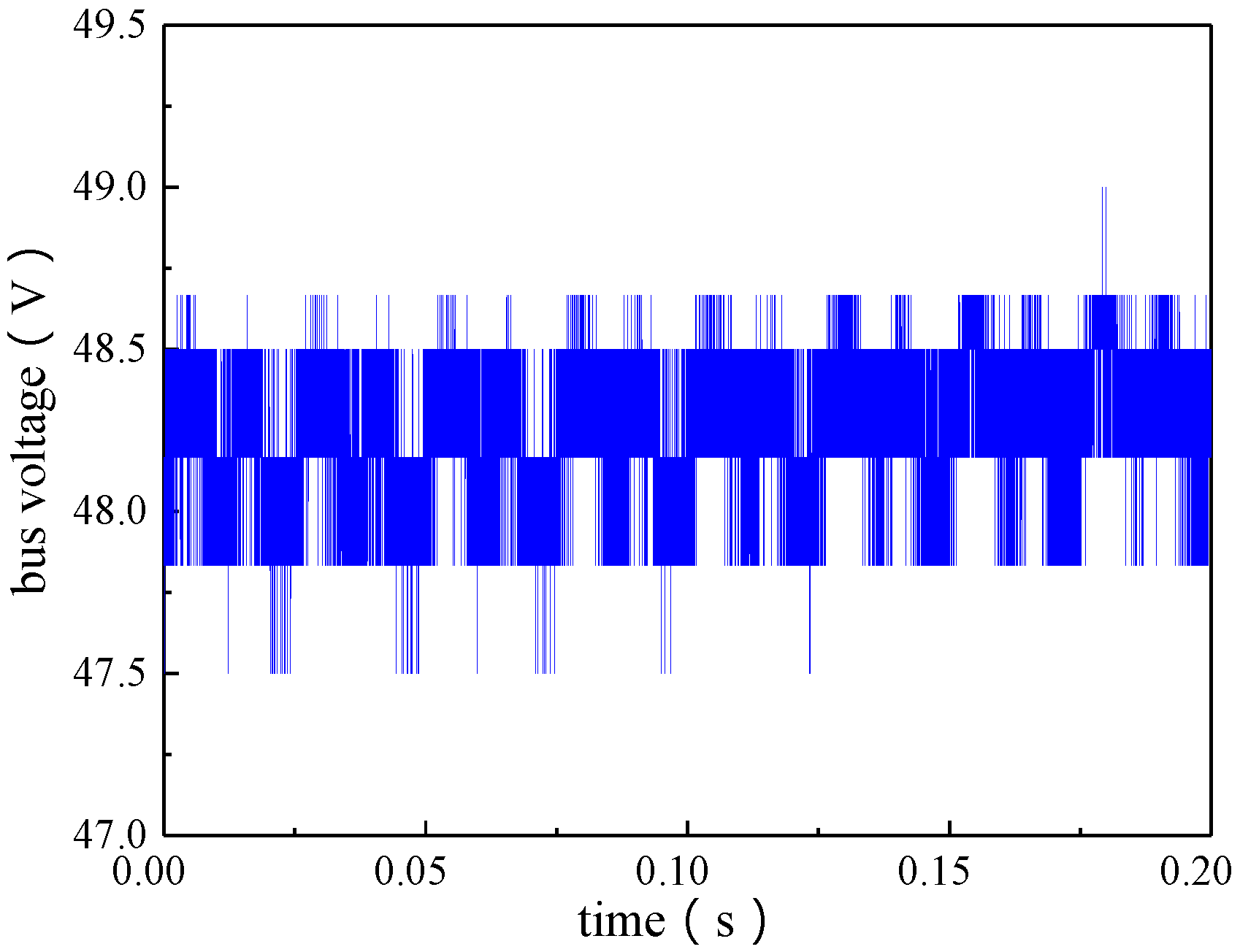
Figure 9 illustrates the average output voltage comparison of three different control strategies. Voltage ripple under the load of 100 Ω in generating mode is shown in
Figure 10.
In
Figure 8 and
Figure 9, voltage ripple (0.5%) based on IMC-SM control strategy reduces compared with the original generation control strategy (0.8%) and current decoupled control strategy (0.7%) in no-load stage. Take 100 Ω load for example, voltage ripple (0.9%) based on IM-SMC control strategy is smaller than original generation control strategy (1.4%) and current decoupled control strategy (1.3%) in
Figure 8, which means the performance of voltage ripple based on IM-SMC control strategy is optimal.
The voltage ripple amplitude with load mutation is shown in
Figure 8 and
Figure 9. When the load state changes from no load to 150 Ω resistance load connected, the maximum voltage ripple of original generation control strategy is 1.8%, while that of decoupled current control strategy is 1.2% compared to that based on IM-SMC control strategy is 0.9% which is better than the two. As resistance load decreases from 150 Ω to 100 Ω, the voltage ripples of original generation control strategy, decoupled current control strategy and the control strategy based on IM-SMC are 1.7%, 1.4% and 1.2% respectively, which shows that decoupling control strategy is superior than the other two. As resistance load decreases from 100 Ω to 50 Ω, the maximum voltage ripple of control strategy based on IM-SMC is 2%, which is less than that of original generation control strategy and decoupled current feedback control strategy, 2.8% and 3% respectively.
The adjusting time with load mutation is shown in
Figure 8 and
Figure 9. The adjusting time of original generation strategy, decoupled current feedback strategy and strategy based on IM-SMC is 0.75 s, 0.6 s and 0.6 s, respectively. As resistance load decreases from 150 Ω to 100 Ω, the adjusting time of original generation strategy, decoupled current feedback strategy and strategy based on IM-SMC is 0.5 s, 0.4 s and 0.4 s, respectively. As resistance load decreases from 100 Ω to 50 Ω, the adjusting time of original generation strategy, decoupled current feedback strategy and strategy based on IM-SMC is 0.7 s, 0.6 s and 0.6 s, respectively. Based on the analysis above, the adjusting time of current feedback control strategy and the strategy based on IM-SMC under different loads are similar, which are better than the original strategy.
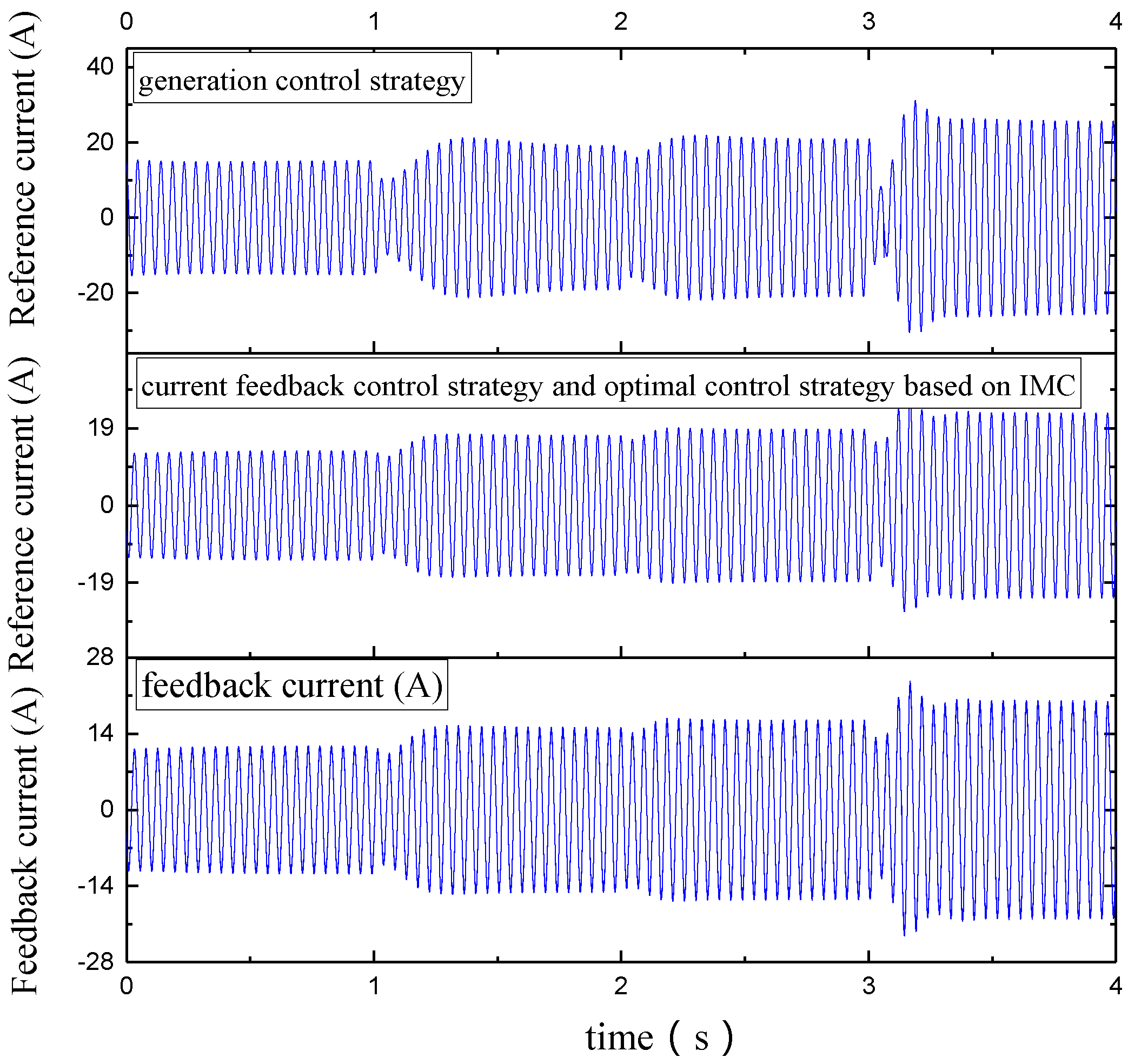
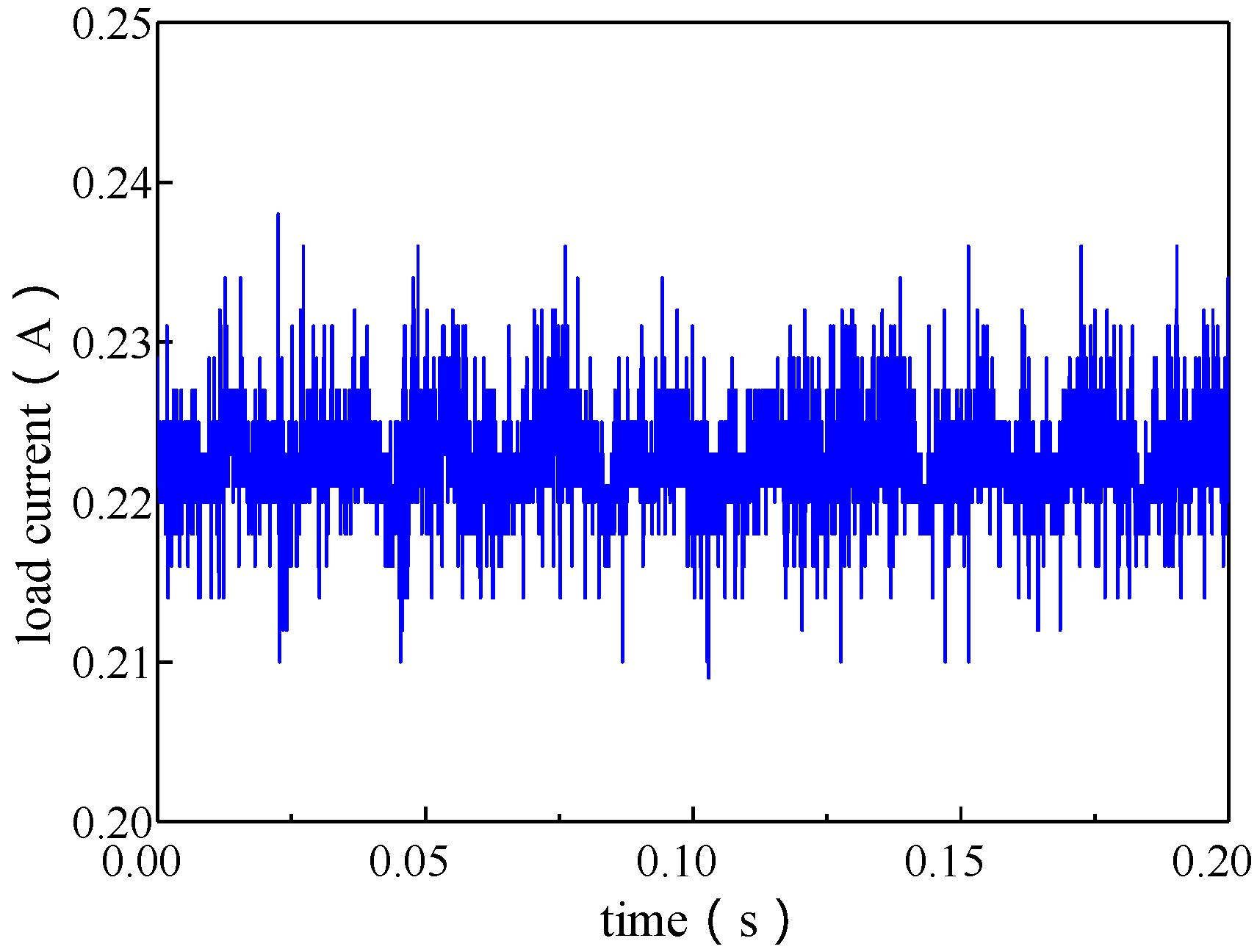
The
d-q axis current following performance of current feedback decoupling and optimal decoupling based on IM-SMC are approximately equal. The comparison of decoupled feedback and original generation control strategy is shown in
Figure 10. The reference value of generation control strategy is 30.05% which is larger than that of feedback current, as that of decoupled control strategy is 14.22% in no-load stage. In load (100 Ω) stage, the reference value of generation control strategy is 30.69% larger than that of feedback current while that of decoupled control strategy is 13.63%. The output of
d-q axis regulator transfers to compensate voltage, and current loop
id,
iq are decoupled to improve the following performance of
q-axis current. Decoupled current feedback control strategy is superior to that of generation control strategy in promoting the following performance of current.
Decoupled current feedback control strategy is superior to generation control strategy in promoting voltage adjusting time, voltage ripple amplitude with load mutation and the following performance of current. Compared to the decoupled current feedback control strategy, optimal decoupled current control strategy based on IM-SMC significantly improves the voltage ripple in generating mode and the voltage amplitude with load mutation. Overall, the performance of free-piston Stirling generating system is promoted by optimal decoupled current control strategy based on IM-SMC.
Since the performance of the power generating system in the process of load mutation is relatively concerned, the system is simulated under three different control strategies and the results are compared with the displacement of displacer piston, output voltage ripple amplitude, adjusting time (response speed) and voltage ripple amplitude under different resistance loads, and the following performance of
d-q axis current is shown in
Table 2. (Take the load stage of 100 Ω for example, no-load regulation means load stage changing from no-load to 150 Ω resistance load, and load regulation means load state changing from 150 Ω to 100 Ω resistance load.)







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}