Bi-Directional Coordination of Plug-In Electric Vehicles with Economic Model Predictive Control




Abstract
:1. Introduction
- First is in the structure of the problem: To the best of our knowledge, charge coordination strategies presented in the literature focus on coordination at the aggregator layer or other higher layers in the control hierarchy. In this paper, another layer of optimisation was added, which handles charging with the prosumer as the main deciding entity. This is a departure from the norm where the prosumer is not an active player in the dynamic market.
- Second is in the development of the charging algorithm with V2G capabilities: A V2G strategy using model predictive control that can be embedded in PEVs was developed using real data from the Triangulum project. To ensure additional flexibility for the prosumer, a weighting parameter, q, was introduced.
2. System Model
2.1. Discrete State Space Model of the SoC
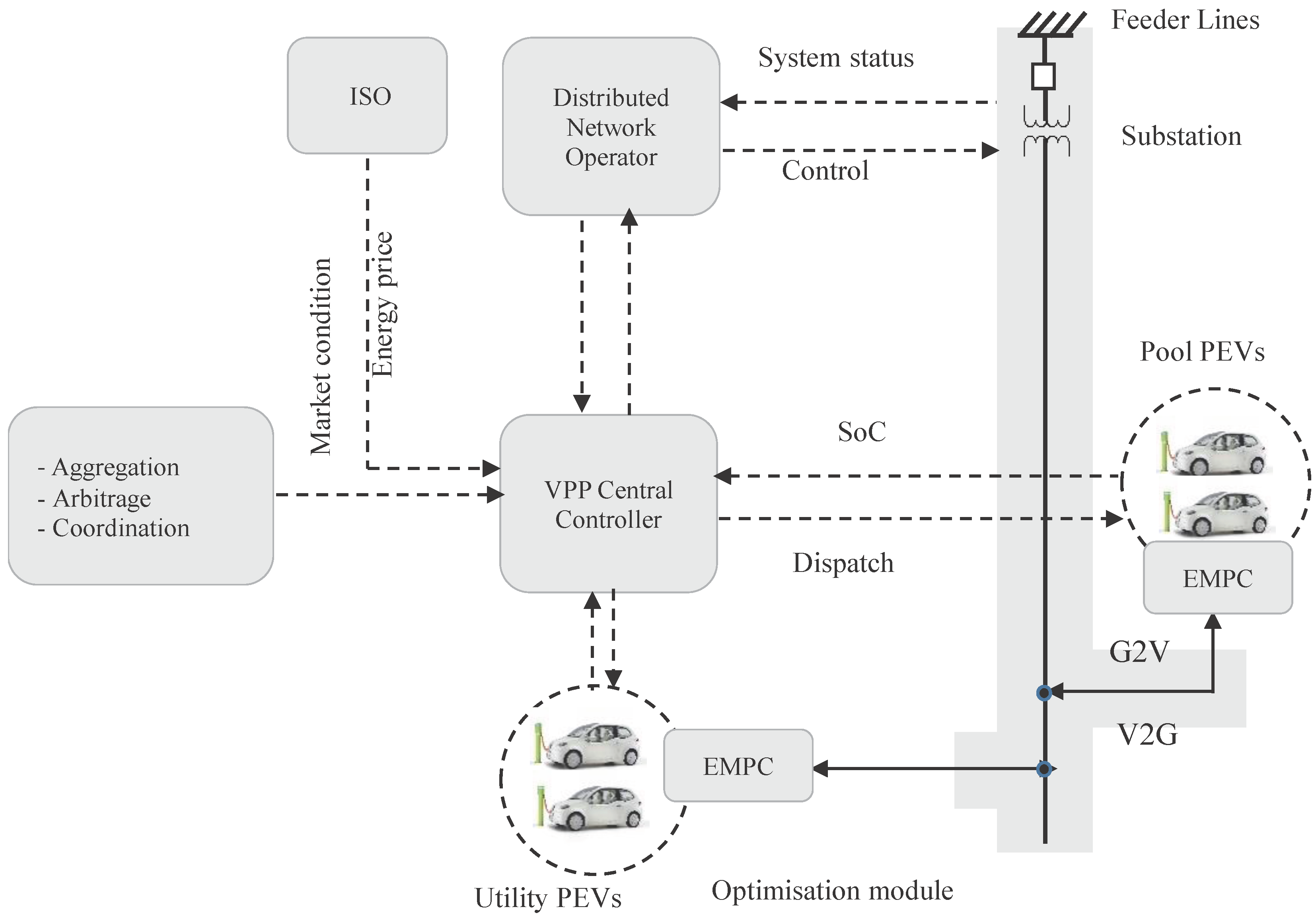
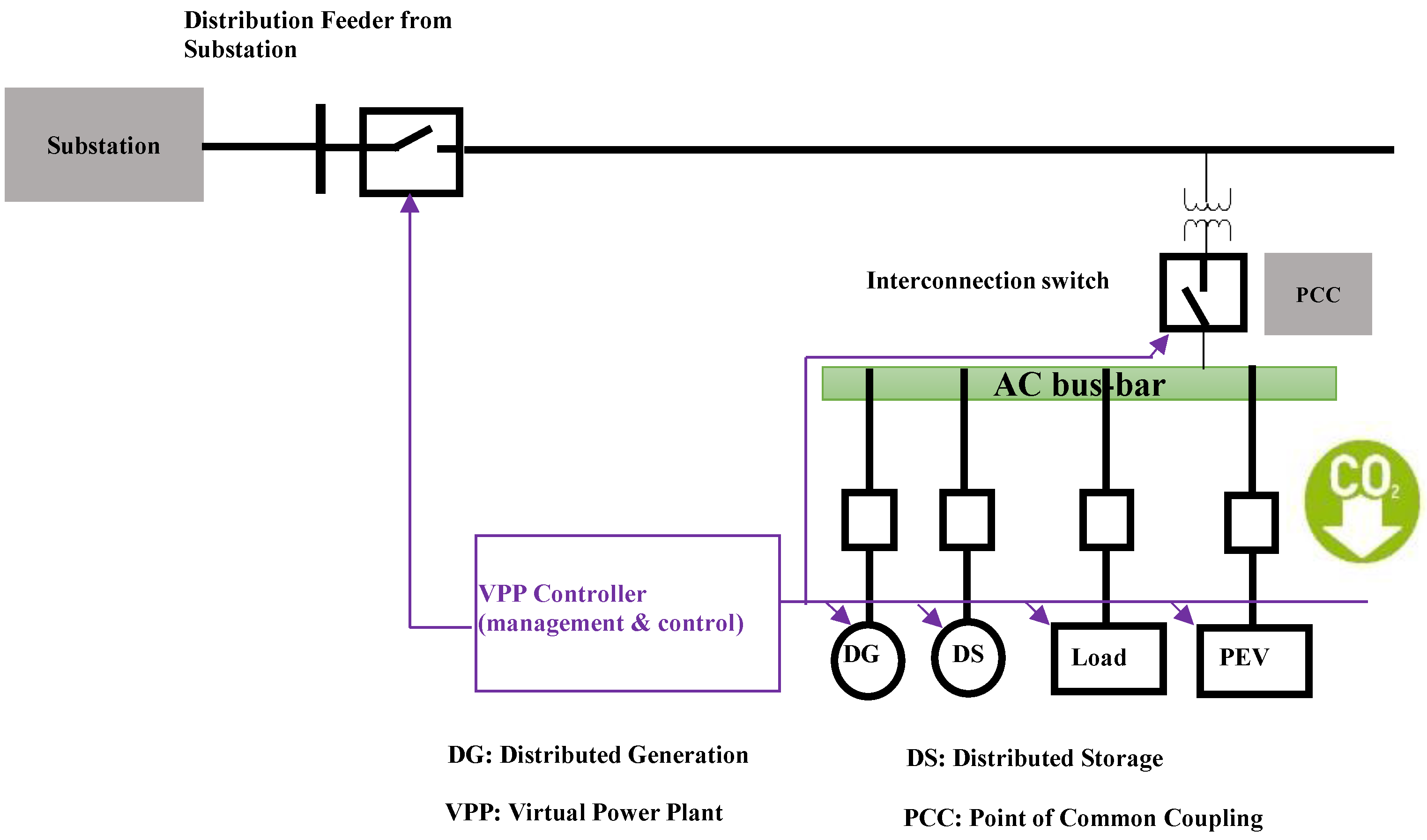
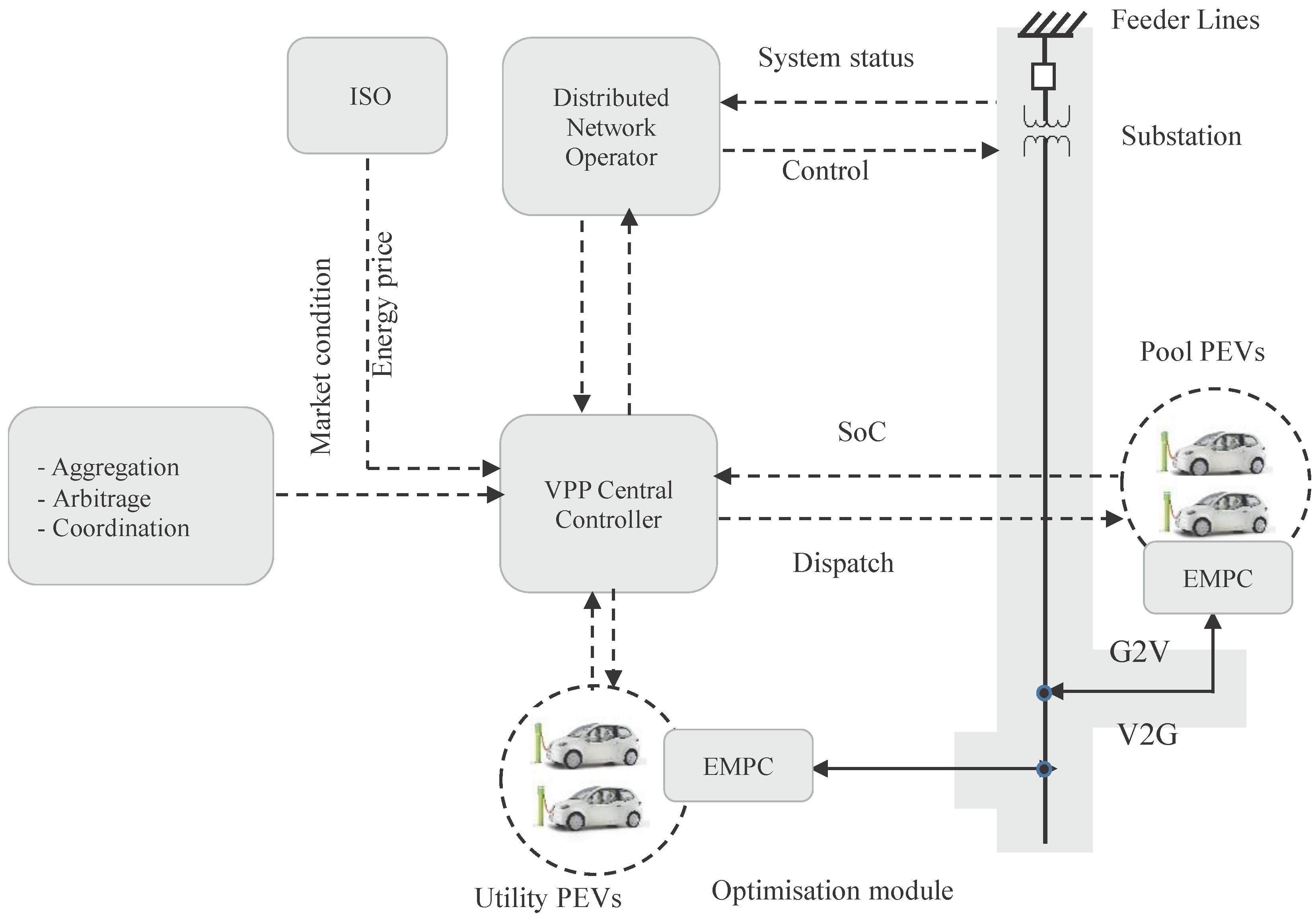
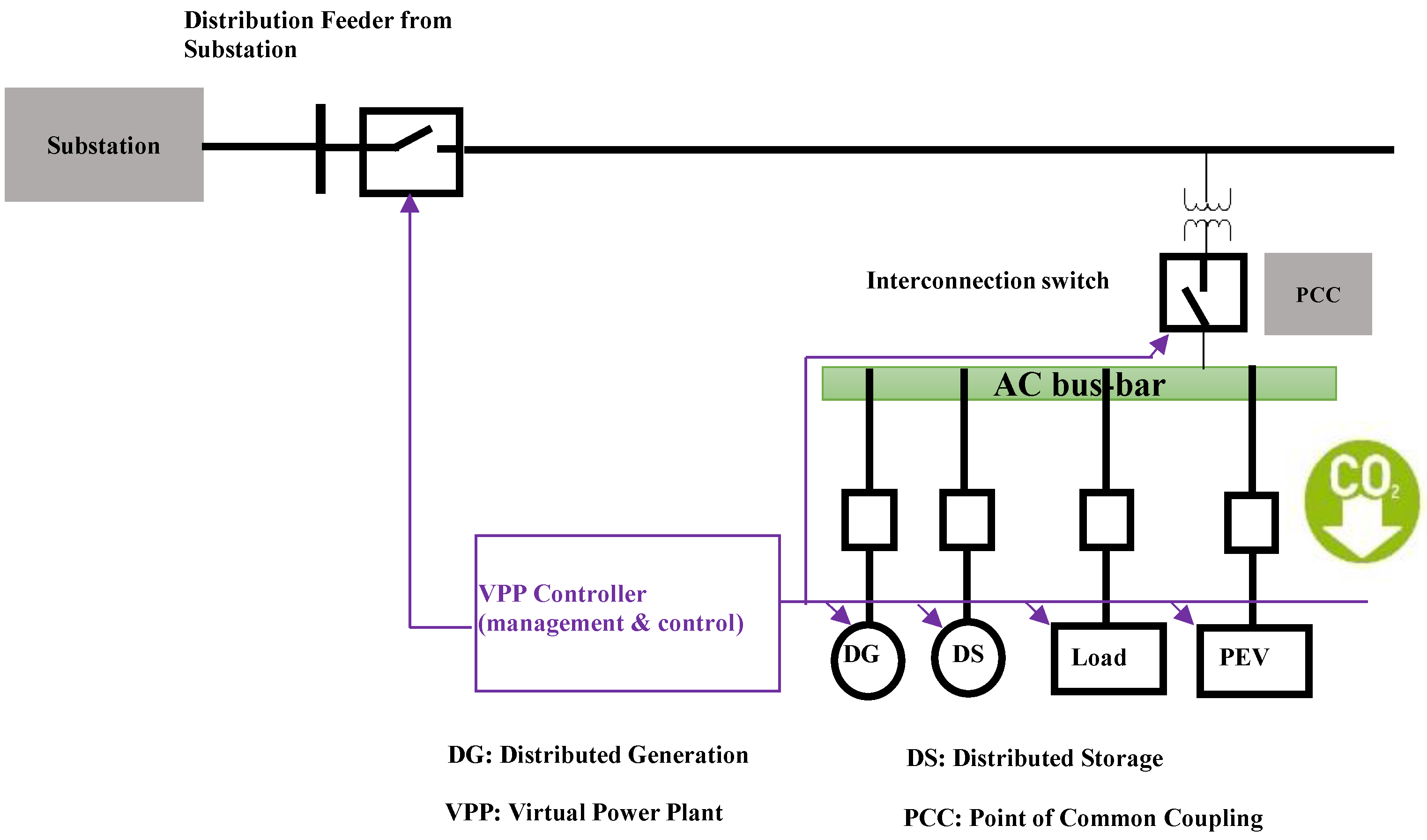
2.2. System Configuration
2.3. Case Study and Model Parameters
3. Economic Model Predictive Control
| Algorithm 1 Vehicle charging using MPC. |
| Input: Current (initial) state of charge SoC, , prediction horizon, , sample time, , vehicle usage pattern and electricity price. |
| Output: Input sequence, i.e., charging power |
| Compute prediction and constraint matrices |
| while PEV is connected to charger do |
| Update vehicle usage |
| Update electricity price |
| Update prediction and constraint matrices and weights |
| Solve constrained optimisation problem to obtain input sequence, U. |
| Apply only the first element in the sequence, . |
| Update state of charge |
| end while |
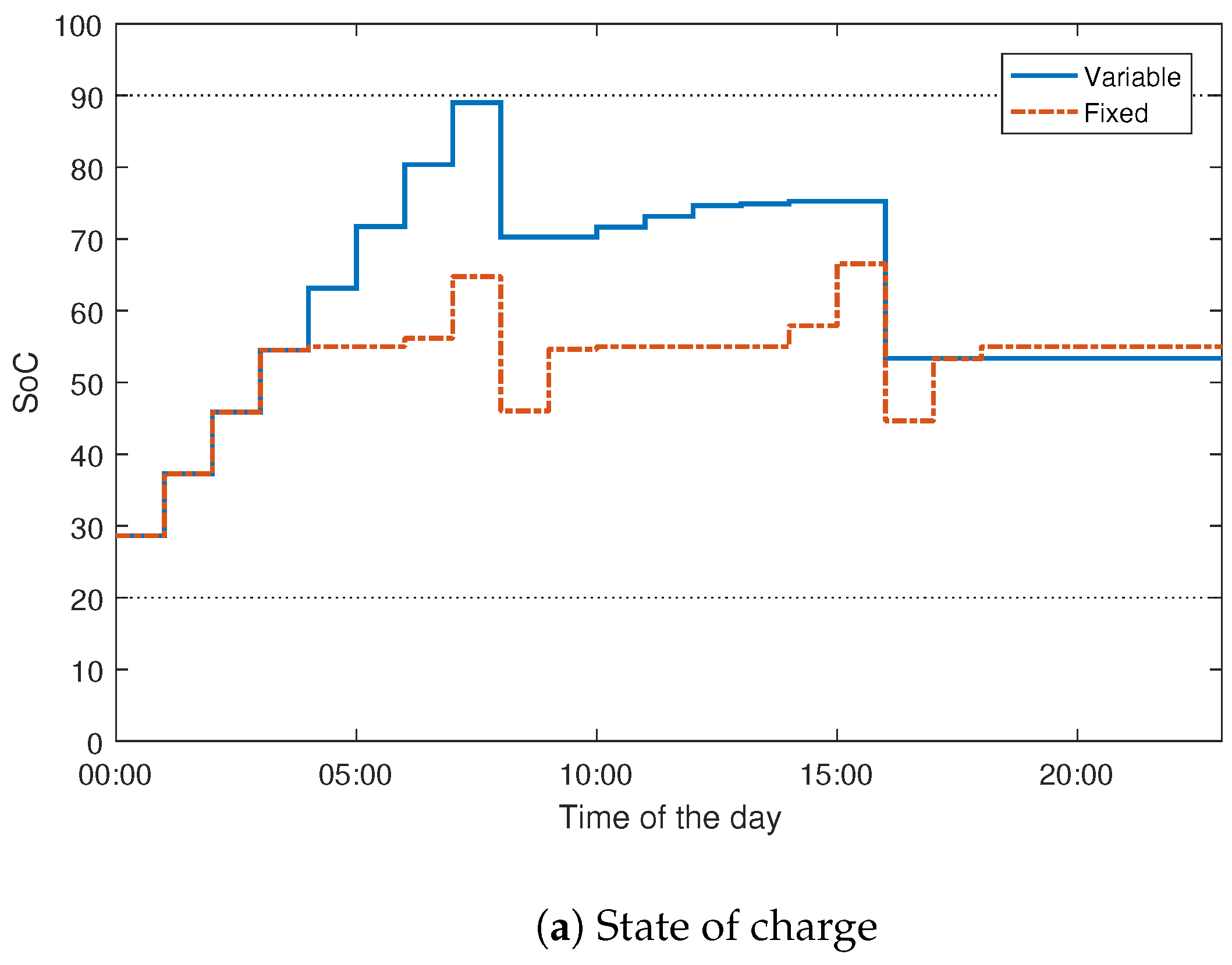
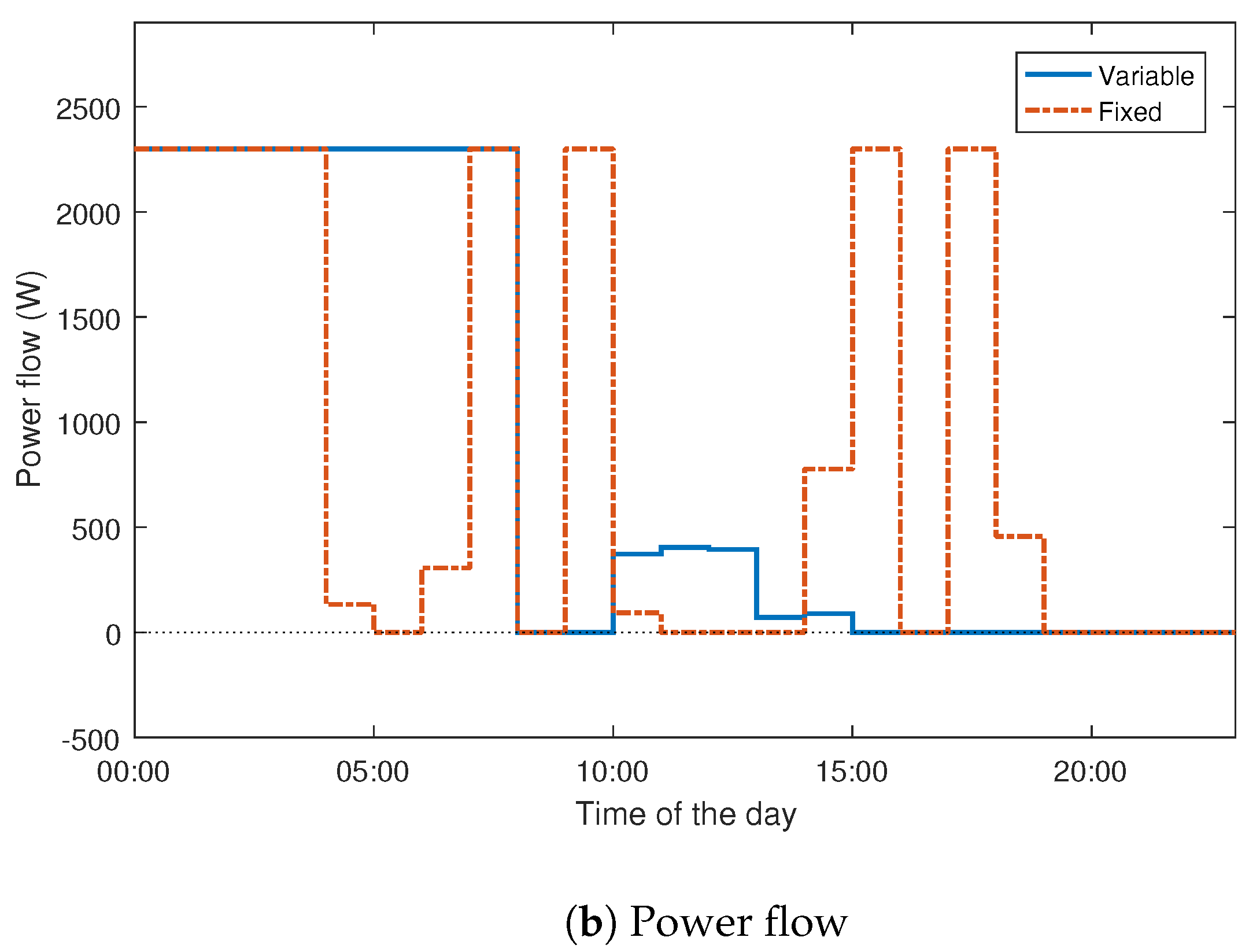
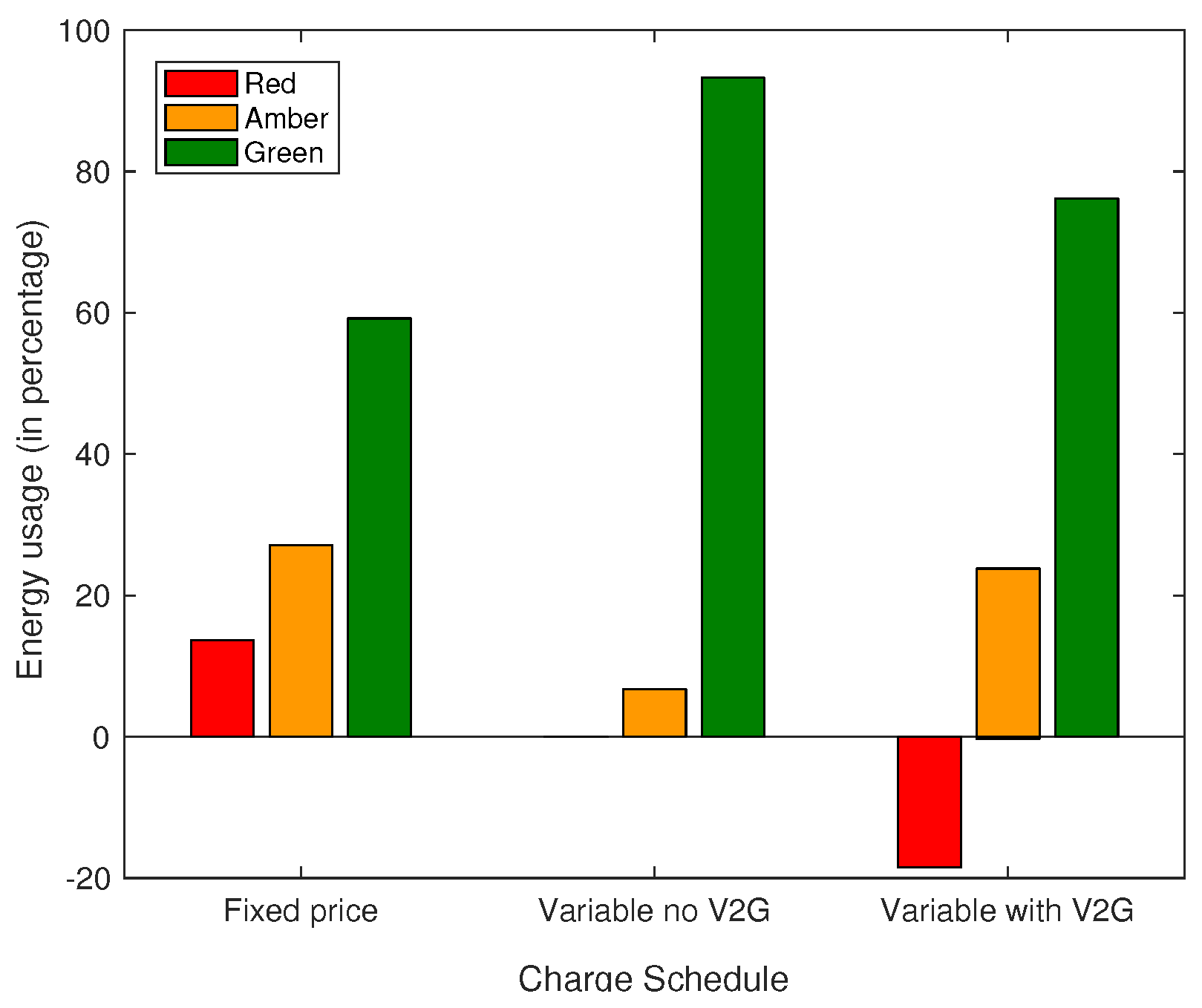
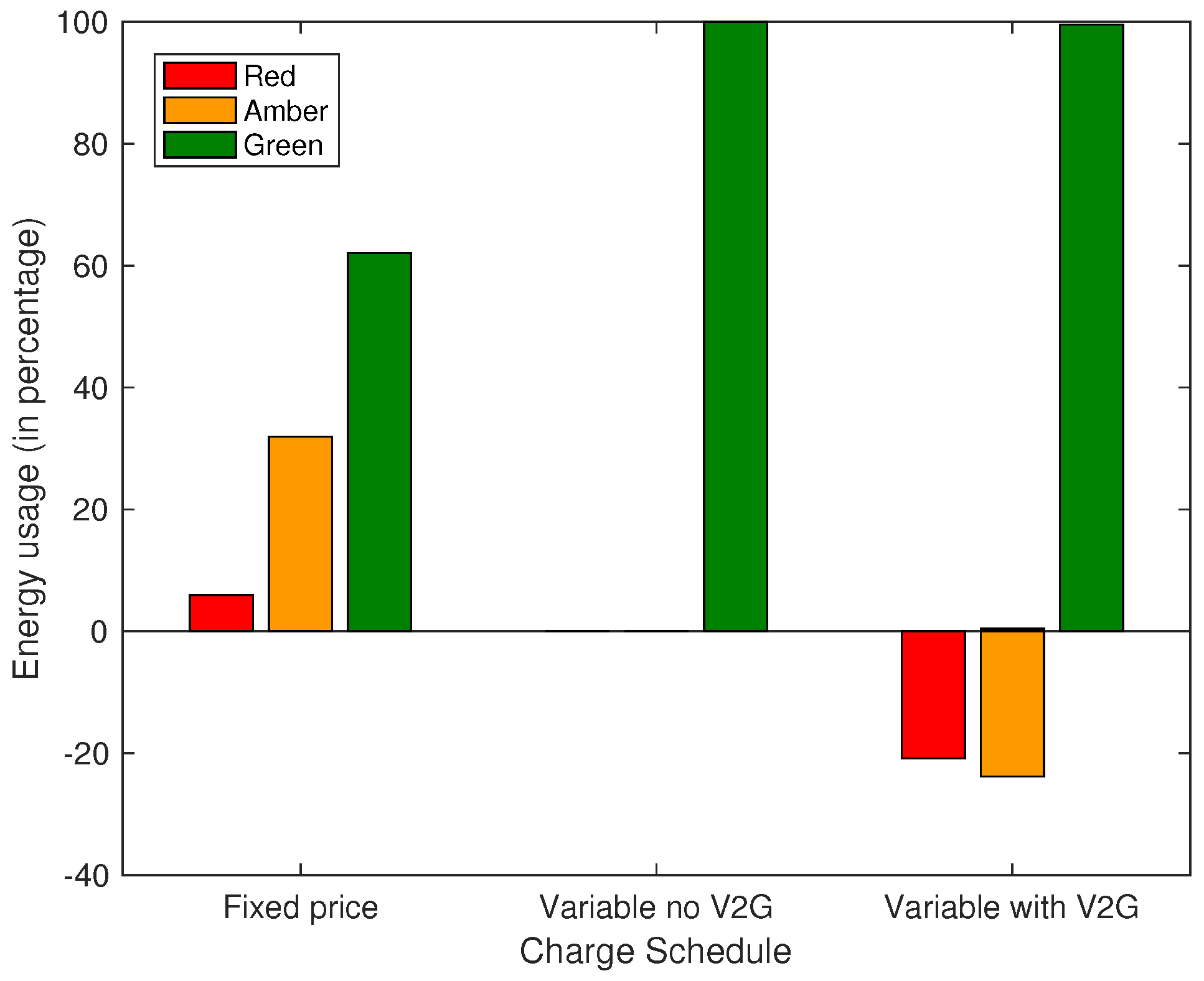
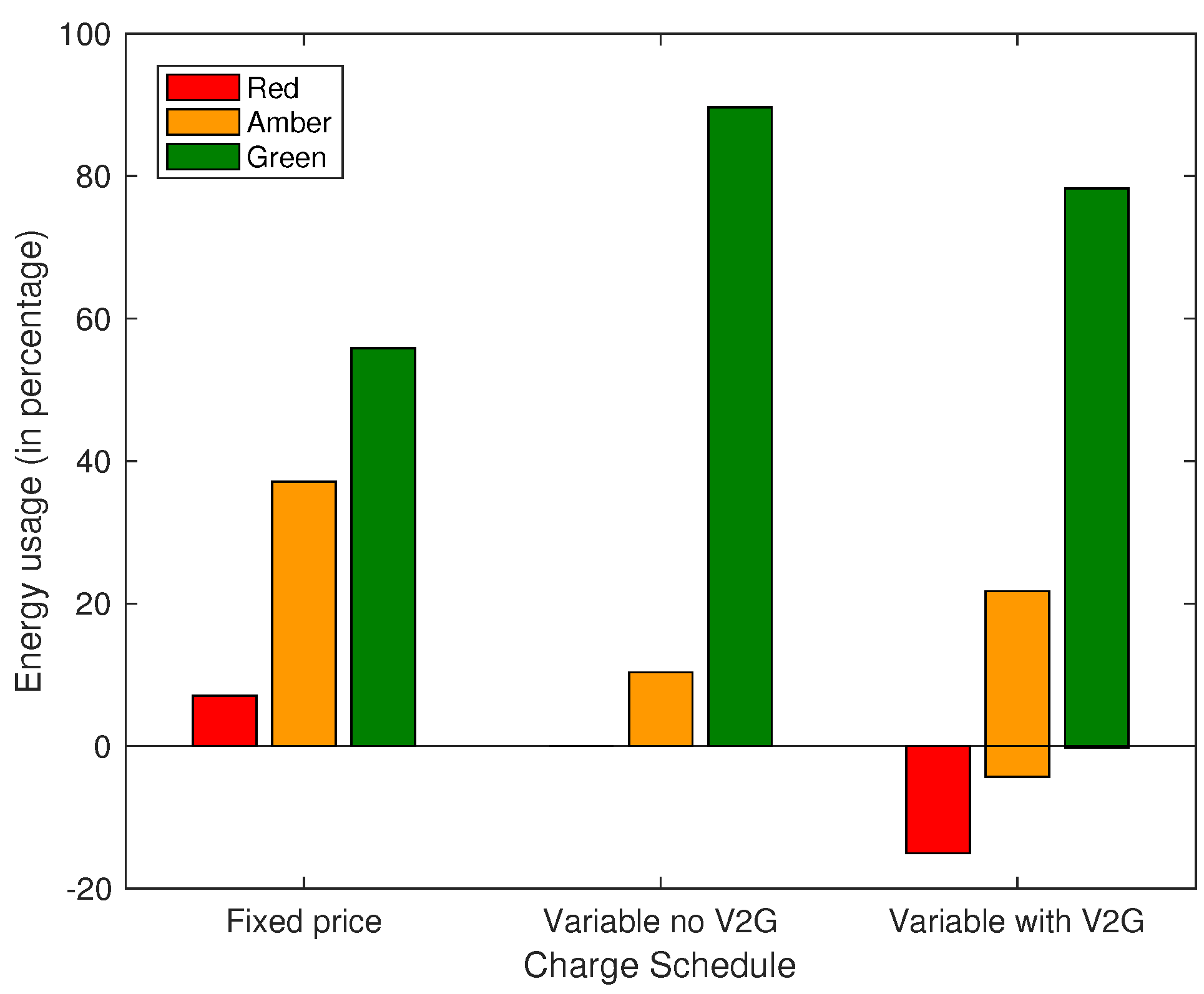
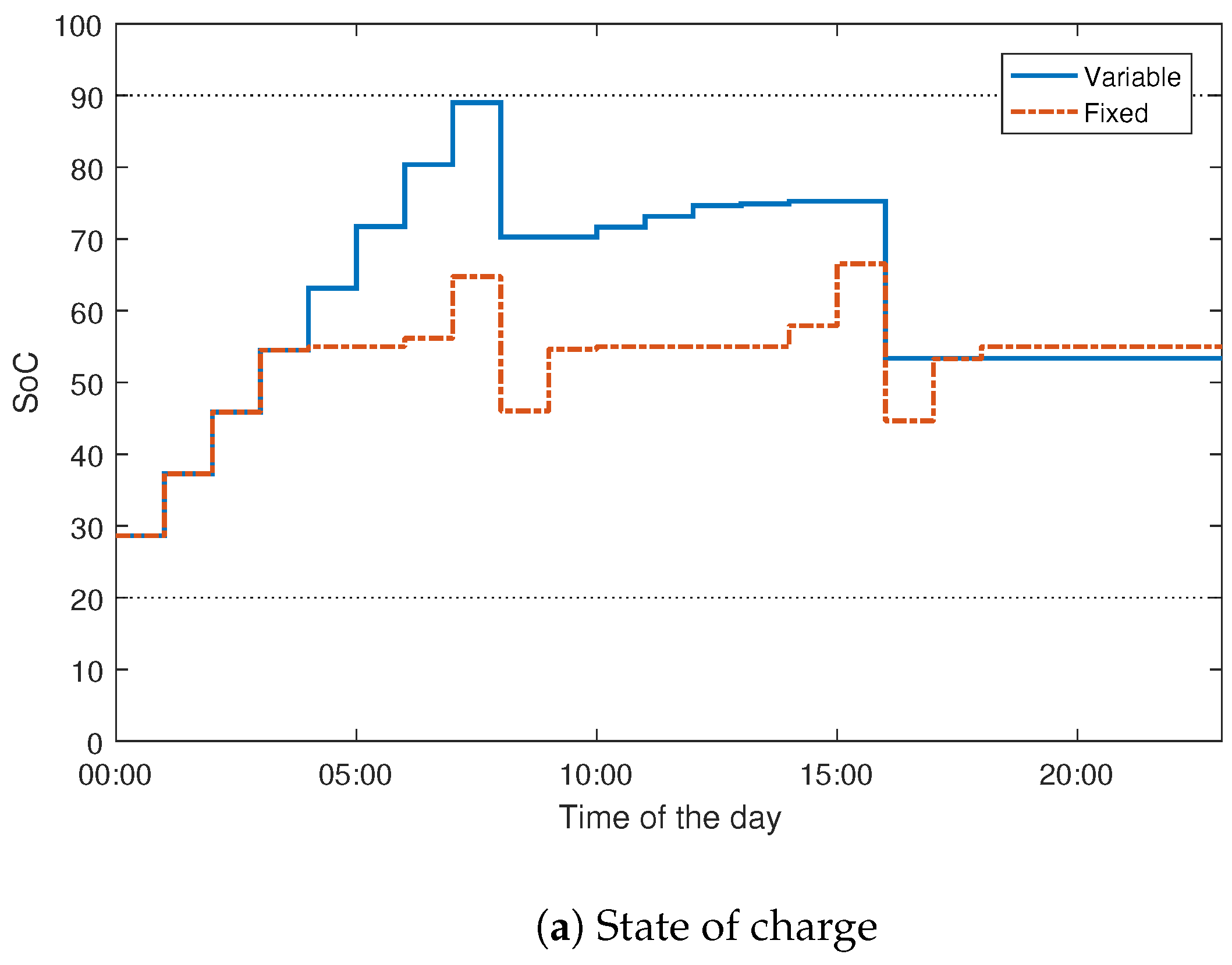
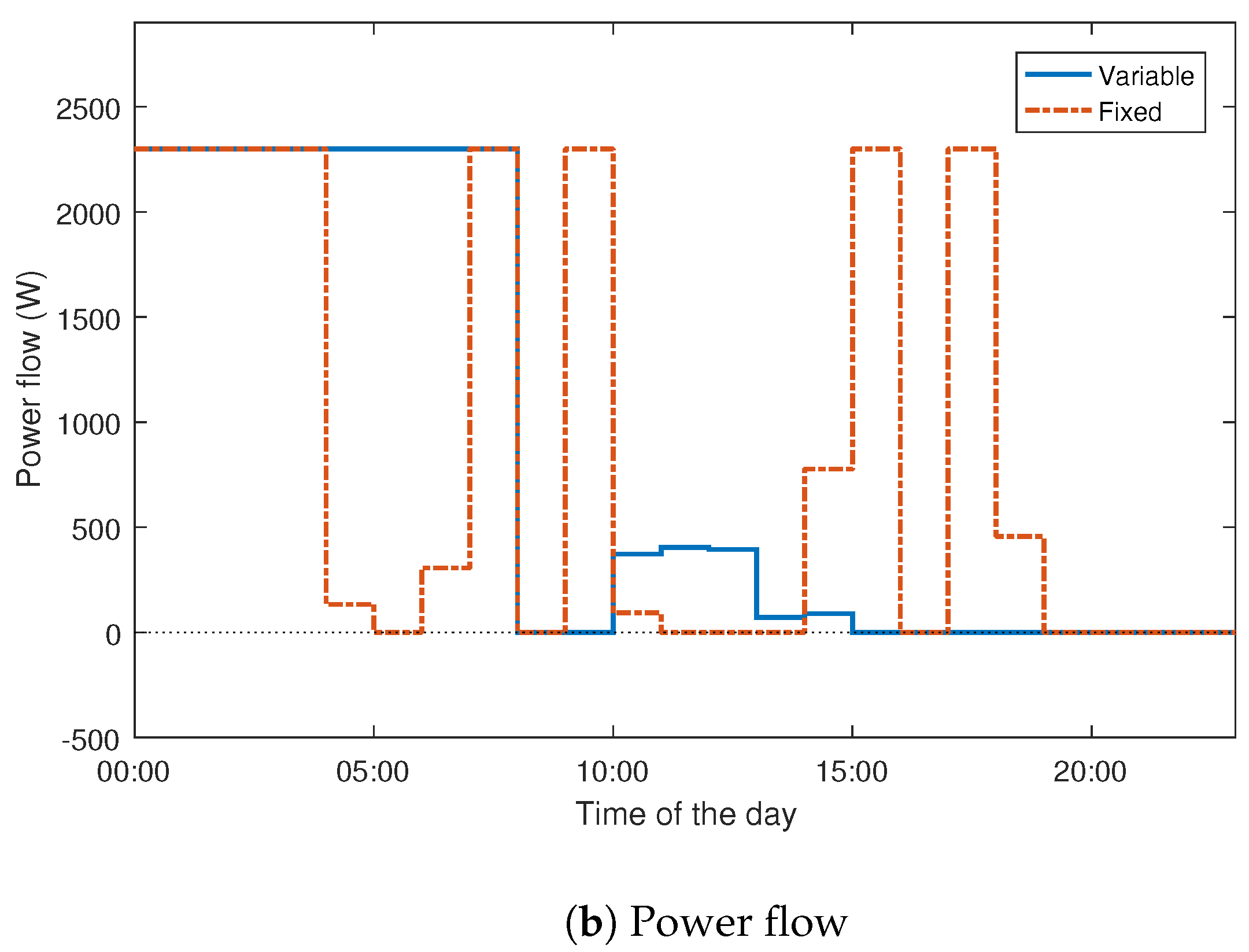
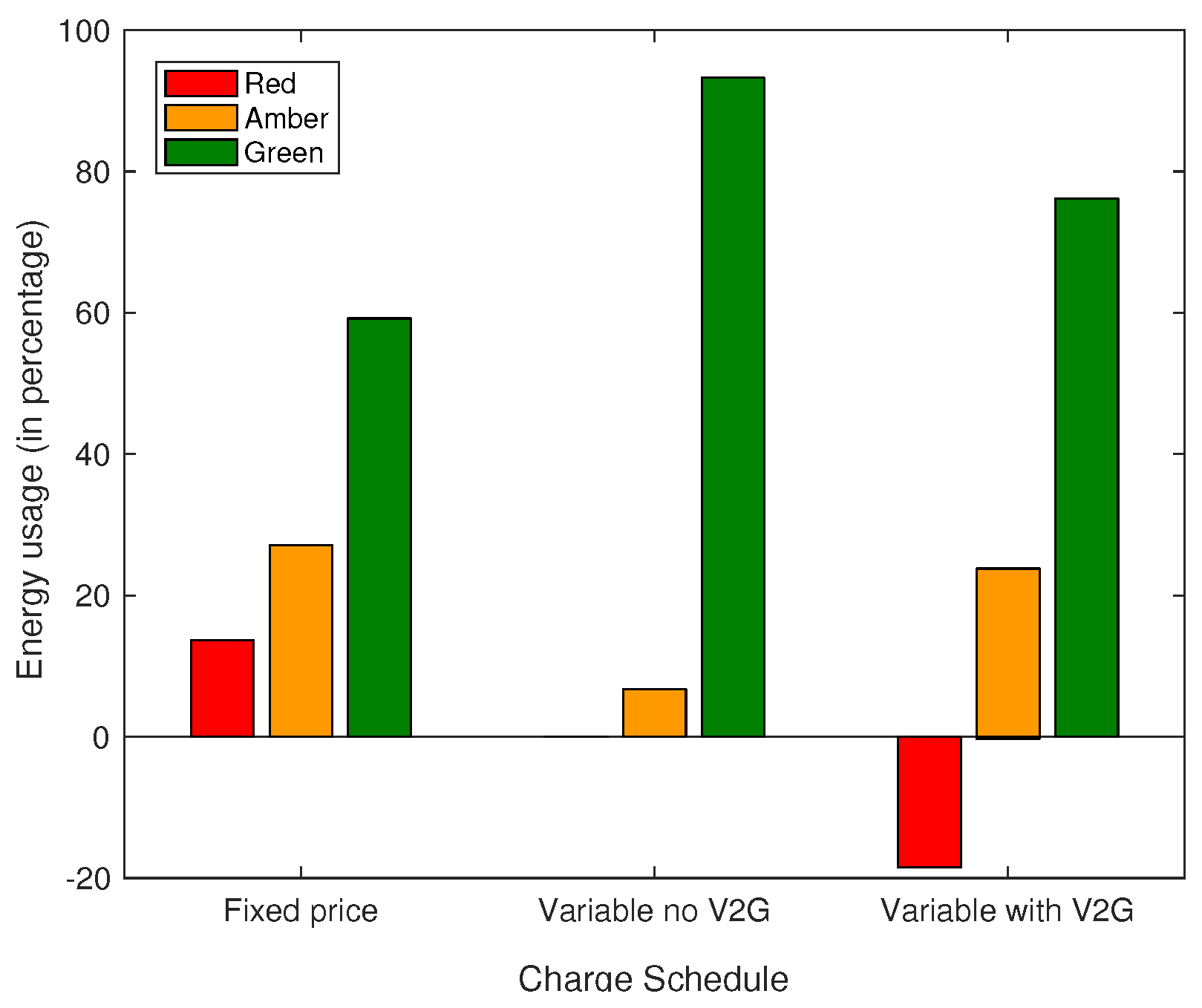
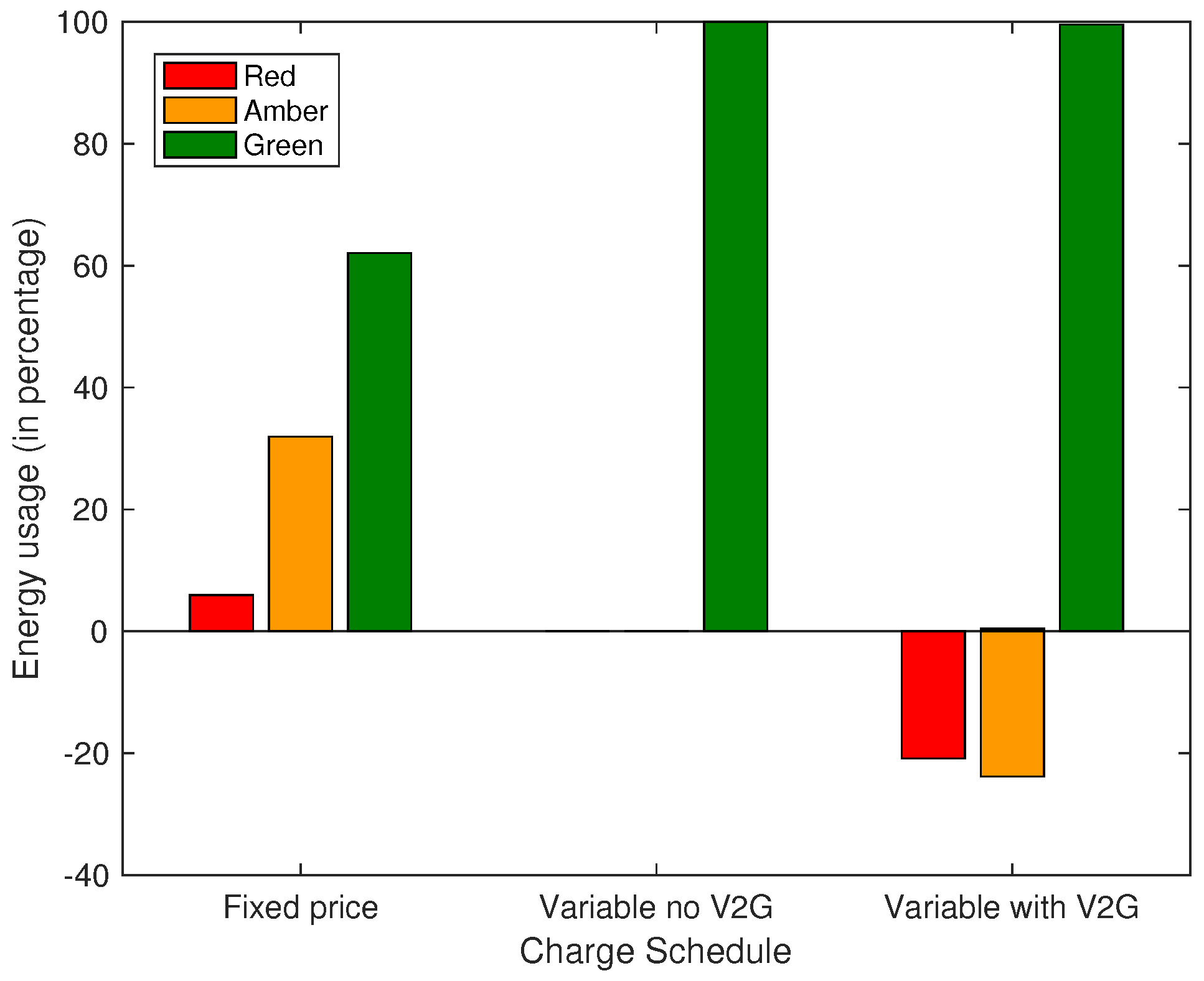
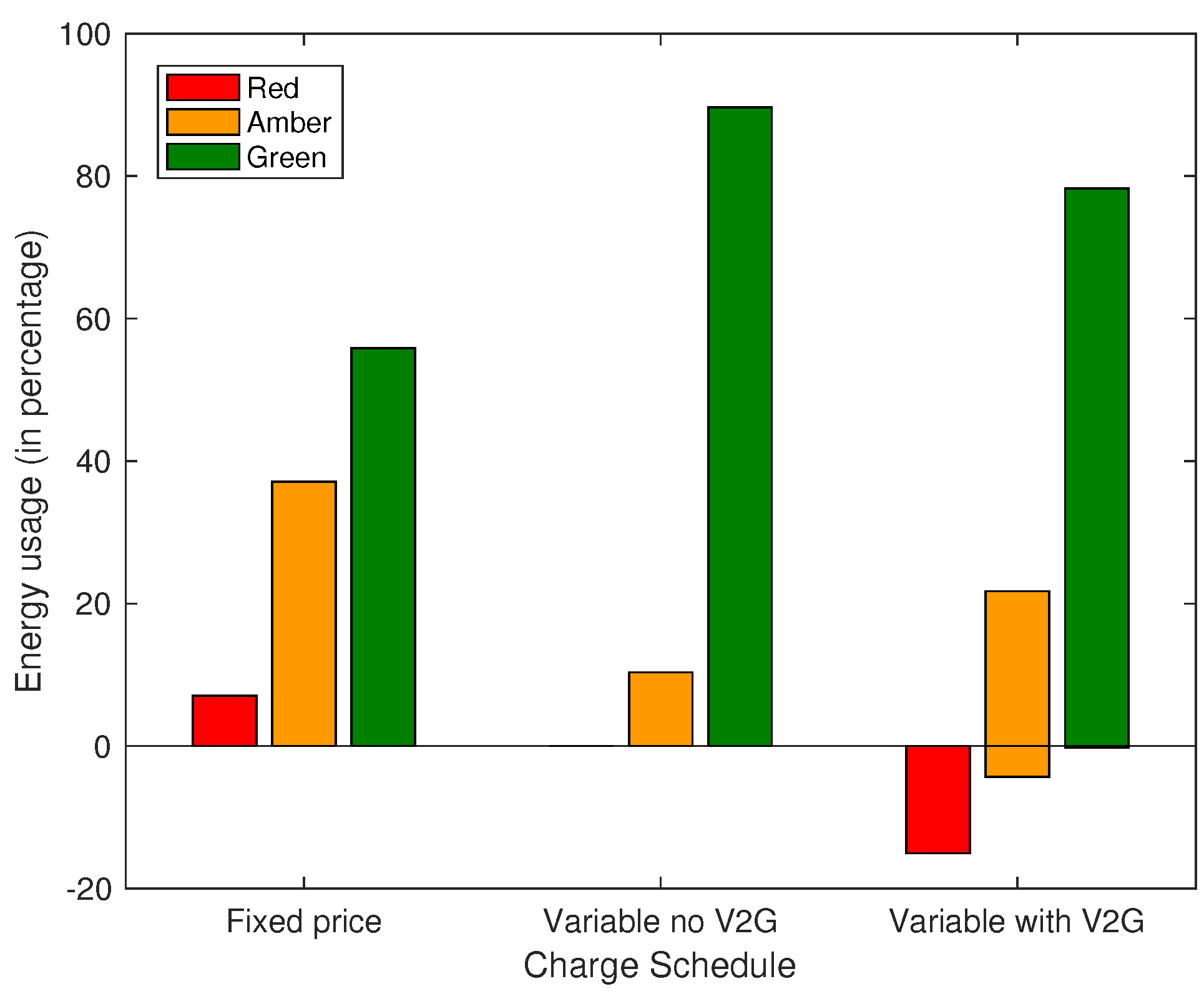
- Fixed price: For this scenario, the charging schedule was developed using a fixed price of electricity throughout the day.
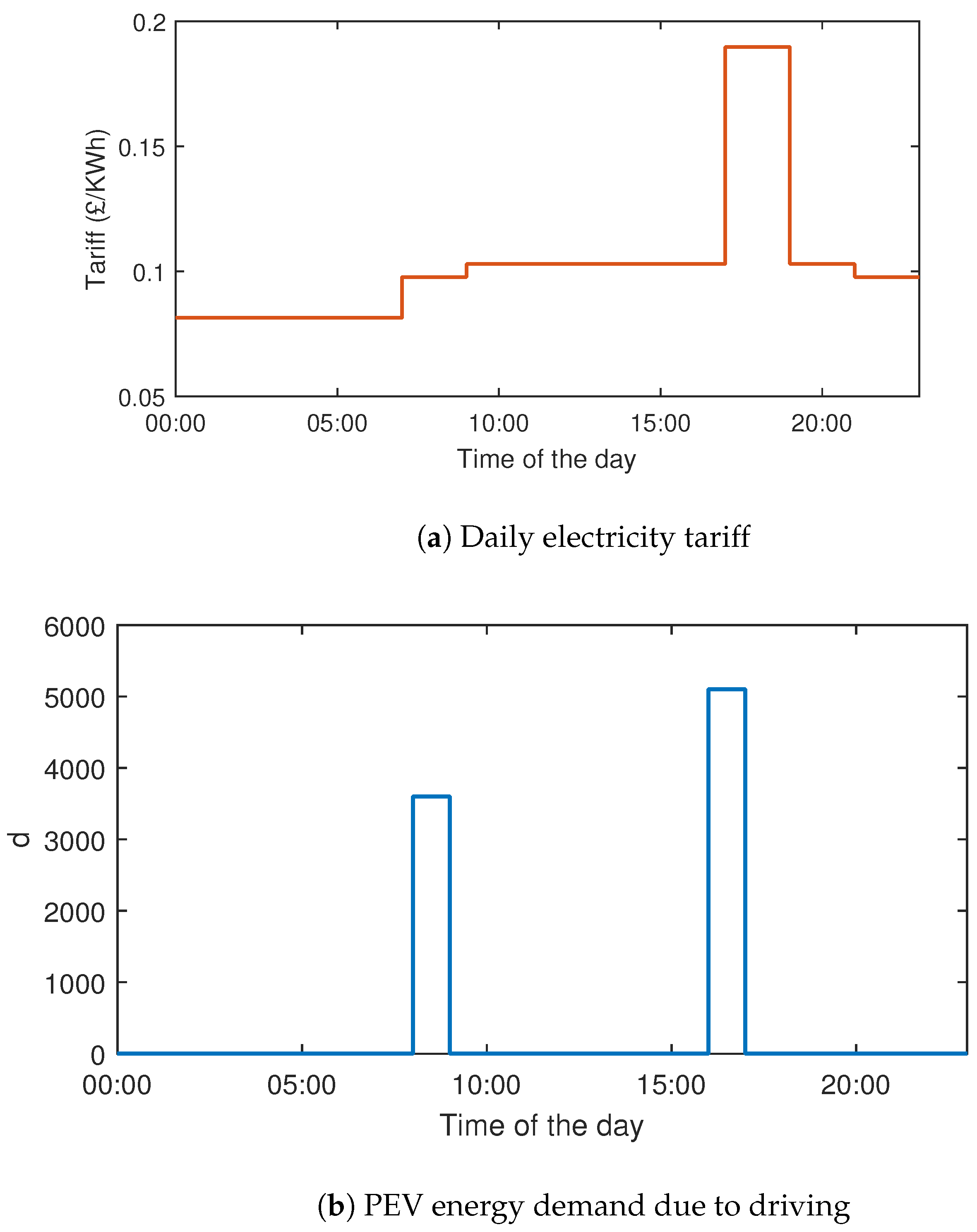
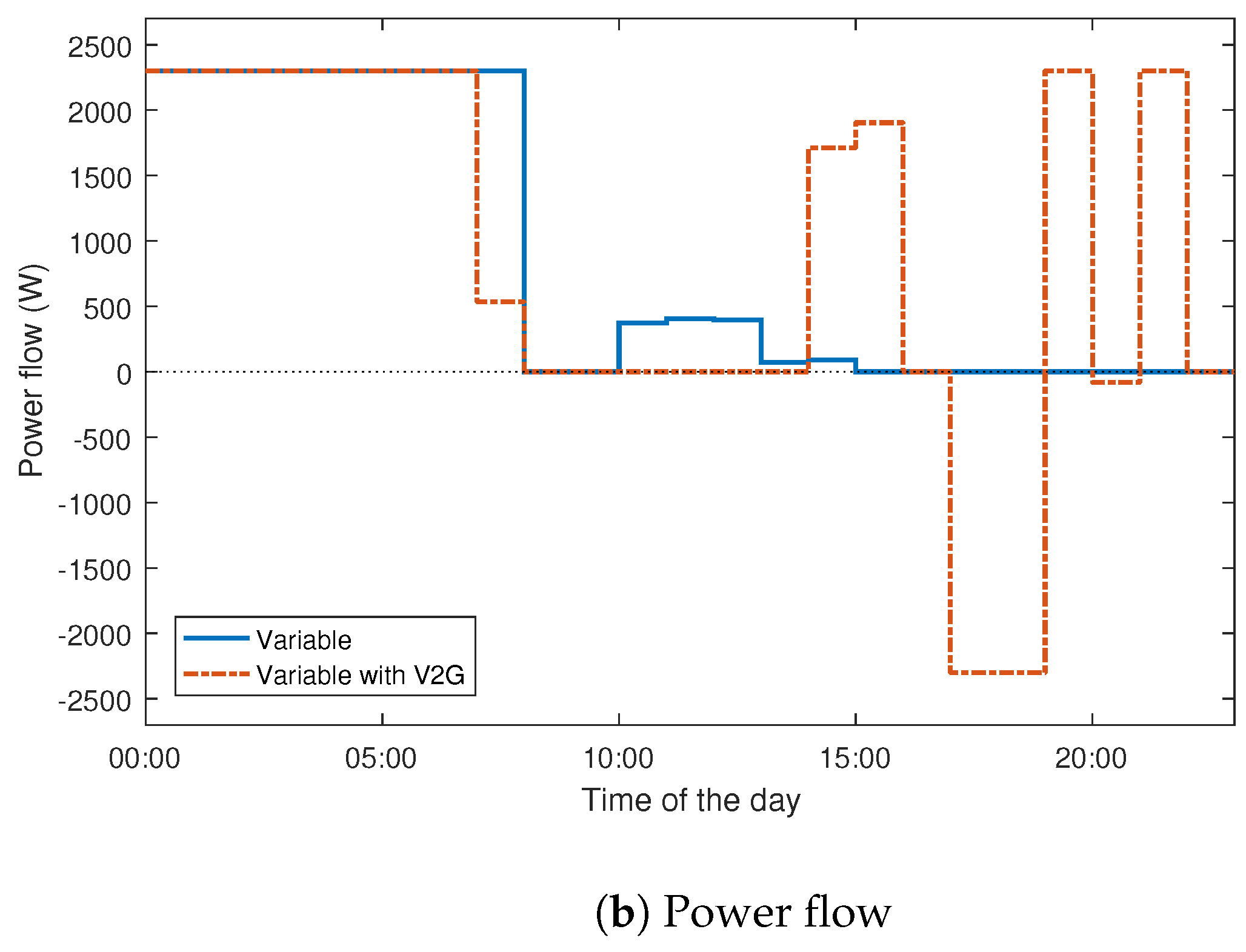
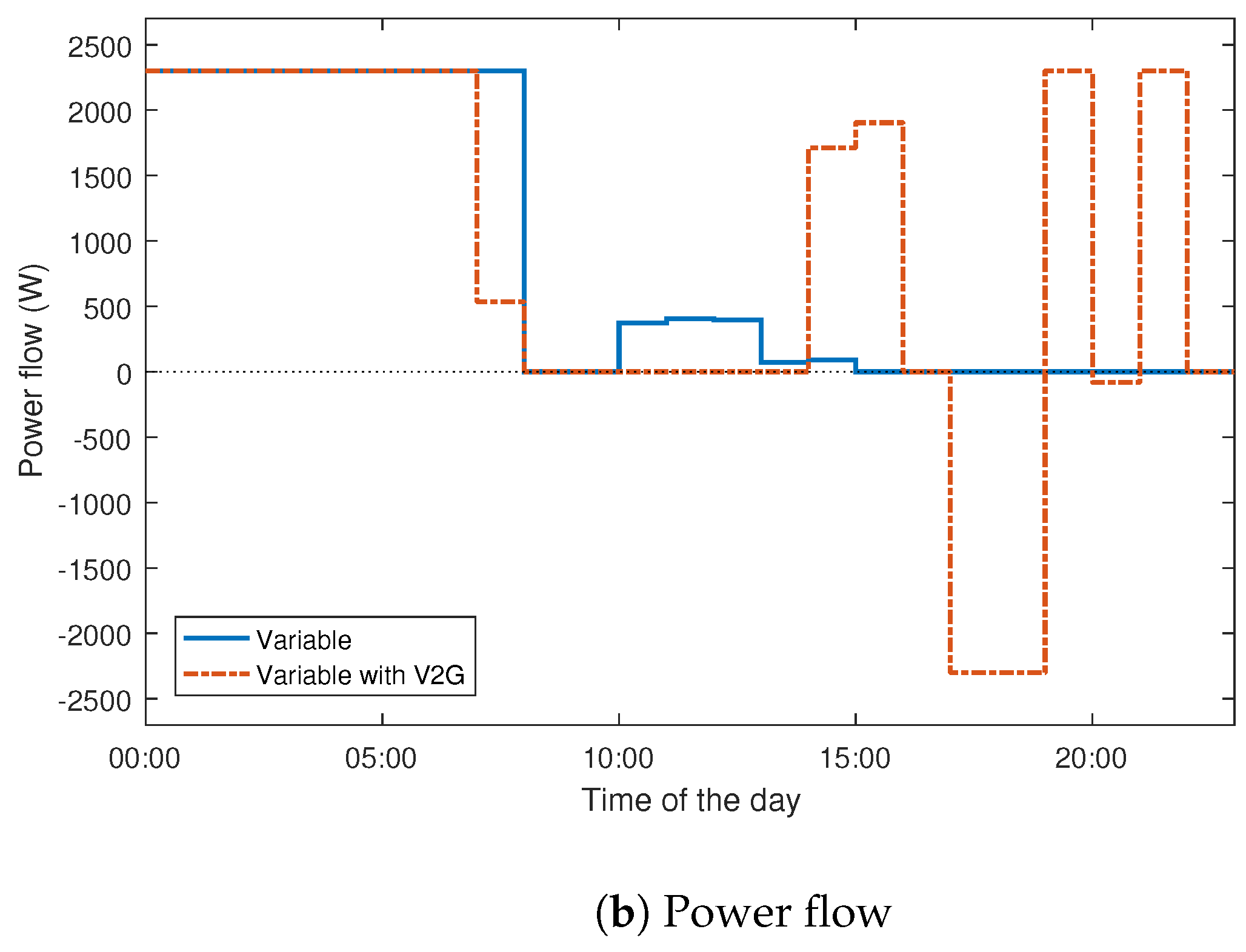
- Variable price without V2G.
- Variable price with V2G.
4. Simulations and Results
4.1. Personal Vehicles
4.2. Pool Vehicles
4.3. Utility Vehicles
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DNO | distribution network operator |
| EMPC | economic model predictive control |
| EU | European Union |
| DER | distributed energy resources |
| DG | distributed generation |
| DR | demand response |
| DS | distributed storage |
| G2V | grid-to-vehicle |
| ISO | independent system operator |
| PEV | plug-in electric vehicle |
| RTP | real-time pricing |
| SoC | state of charge |
| TOU | time-of-use |
| LTI | linear time-invariant |
| MPC | model predictive control |
| UNEP | United Nations Environmental Program |
| V2G | vehicle-to-grid |
| VPP | virtual power plant |
References
- David, B.R. Electric vehicles and the electric grid: A review of modeling approaches, Impacts, and renewable energy integration. Renew. Sustain. Energy Rev. 2013, 19, 247–254. [Google Scholar]
- UN. District Energy in Cities. Available online: http://www.unep.org/energy/districtenergyincities (accessed on 22 December 2016).
- Sittoni, A.; Brunelli, D.; Macii, D.; Tosato, P; Petri, D. Street lighting in smart cities: A simulation tool for the design of systems based on narrowband PLC. In Proceedings of the 2015 IEEE First International Smart Cities Conference (ISC2), Guadalajara, Mexico, 25–28 October 2015; pp. 1–6. [Google Scholar]
- Ikpehai, A.; Adebisi, B.; Kharel, R. Smart street lighting over narrowband PLC in a smart city: The Triangulum case study. In Proceedings of the 2016 IEEE 21st International Workshop on Computer Aided Modelling and Design of Communication Links and Networks, Toronto, ON, Canada, 23–25 October 2016; pp. 242–247. [Google Scholar]
- Ikpehai, A.; Adebisi, B.; Rabie, K.M.; Haggar, R.; Baker, M. Experimental Study of 6LoPLC for Home Energy Management Systems. Energies 2016, 9, 1026. [Google Scholar] [CrossRef]
- Wang, H.; Huang, J. Cooperative Planning of Renewable Generations for Interconnected Microgrids. IEEE Trans. Smart Grid 2016, 7, 2486–2496. [Google Scholar] [CrossRef]
- Di Giorgio, A.; Liberati, F.; Canale, S. Electric vehicles charging control in a smart grid: A model predictive control approach. Control Eng. Pract. 2014, 22, 147–162. [Google Scholar] [CrossRef]
- Su, W.; Wang, J.; Zhang, K.; Huang, A.Q. Model predictive control-based power dispatch for distribution system considering plug-in electric vehicle uncertainty. Electr. Power Syst. Res. 2014, 106, 29–35. [Google Scholar] [CrossRef]
- Halvgaard, R.; Poulsen, N.K.; Madsen, H.; Jorgensen, J.B.; Marra, F.; Bondy, D.E.M. Electric vehicle charge planning using Economic Model Predictive Control. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; pp. 1–6. [Google Scholar]
- Marcacci, S. Electric Vehicles Speeding Toward 7% of all Global Sales by 2020. Available online: https://cleantechnica.com (accessed on 22 December 2016).
- Conn, I.C. Energy, Transport and the Environment: Providing Energy Security; Springer Energy, Transport and the Environment Addressing the Sustainability Mobility Program; Springer: London, UK, 2012; Volume VIII 713, p. 195. [Google Scholar]
- Cluzel, C.; Lane, B.; Standen, E. Pathways to High Penetration of Electric Vehicles; Techreport, Element Energy Limited: Cambridge, UK, 2013. [Google Scholar]
- Aston University Commissions the UK’S First Permanent Electric Vehicle to Grid Charging System. News Report. Aston University, 2016. Available online: http://www.aston.ac.uk/news/releases/2016/february/aston-commissions-uks-first-electric-vehicle-to-grid-charging-system (accessed on 30 December 2016).
- Guille, C.; Gross, G. A conceptual framework for the vehicle-to-grid (V2G) implementation. Energy Policy 2009, 37, 4379–4390. [Google Scholar] [CrossRef]
- Tan, L.; Liu, H.; Liu, Z.; Guo, J.; Yan, C.; Wang, W.; Huang, X. Power Stabilization Strategy of Random Access Loads in Electric Vehicles Wireless Charging System at Traffic Lights. Energies 2016, 9, 811. [Google Scholar] [CrossRef]
- Jiang, C.; Chau, K.T.; Liu, C.; Lee, C.H.T. An Overview of Resonant Circuits for Wireless Power Transfer. Energies 2017, 10, 894. [Google Scholar] [CrossRef]
- Alvaro Hermana, R.; FraileArdanuy, J.; Zufiria, P.J.; Knapen, L.; Janssens, D. Peer to Peer Energy Trading with Electric Vehicles. IEEE Intell. Transp. Syst. Mag. 2016, 8, 33–44. [Google Scholar] [CrossRef]
- Making the Connection: The Plug-In Vehicle Infrastructure Strategy. Techreport; Office for Low Emission Vehicles: United Kingdom, 2011. Available online: https://www.gov.uk/government/publications/making-the-connection-the-plug-in-vehicle338infrastructure-strategy (accessed on 1 September 2016).
- Aziz, M.; Oda, T.; Mitani, T.; Watanabe, Y.; Kashiwagi, T. Utilization of Electric Vehicles and Their Used Batteries for Peak-Load Shifting. Energies 2015, 8, 3720–3738. [Google Scholar] [CrossRef]
- Han, S.; Han, S. Economic feasibility of V2G frequency regulation in consideration of battery wear. Energies 2013, 6, 748–765. [Google Scholar] [CrossRef]
- Noel, L.; McCormack, R. A cost benefit analysis of a V2G-capable electric school bus compared to a traditional diesel school bus. Appl. Energy 2014, 126, 246–255. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in Vehicles and Renewable Energy Sources for Cost and Emission Reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; Myers, K.S.; Bak-Jensen, B.; Paudyal, S. Multi-time scale control of demand flexibility in smart distribution networks. Energies 2017, 10, 37. [Google Scholar] [CrossRef]
- Du, Y.; Zhou, X.; Bai, S.; Lukic, S.; Huang, A. Review of non-isolated bi-directional DC-DC converters for plug-in hybrid electric vehicle charge station application at municipal parking decks. In Proceedings of the 2010 Twenty-Fifth Annual IEEEApplied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 1145–1151. [Google Scholar]
- Tulpule, P.J.; Marano, V.; Yurkovich, S.; Rizzoni, G. Economic and environmental impacts of a PV powered workplace parking garage charging station. Appl. Energy 2013, 108, 323–332. [Google Scholar] [CrossRef]
- Xing, H.; Fu, M.; Lin, Z.; Mou, Y. Decentralized Optimal Scheduling for Charging and Discharging of Plug-In Electric Vehicles in Smart Grids. IEEE Trans. Power Syst. 2016, 31, 4118–4127. [Google Scholar] [CrossRef]
- Dabbagh, S.R.; Sheikh-El-Eslami, M.K. Risk Assessment of Virtual Power Plants Offering in Energy and Reserve Markets. IEEE Trans. Power Syst. 2016, 31, 3572–3582. [Google Scholar] [CrossRef]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Mwasilu, F.; Justo, J.J.; Kim, E.K.; Do, T.D.; Jung, J.W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Battistelli, C.; Baringo, L.; Conejo, A. Optimal energy management of small electric energy systems including V2G facilities and renewable energy sources. Electr. Power Syst. Res. 2012, 92, 50–59. [Google Scholar] [CrossRef]
- Zhu, Z.; Lambotharan, S.; Chin, W.H.; Fan, Z. AMean Field Game Theoretic Approach to Electric Vehicles Charging. IEEE Access 2016, 4, 3501–3510. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, C.; Xiong, R.; Zhou, W. Study on the Optimal Charging Strategy for Lithium-Ion Batteries Used in Electric Vehicles. Energies 2014, 7, 6783–6797. [Google Scholar] [CrossRef]
- Liu, D.; Wang, Y.; Shen, Y. Electric Vehicle Charging and Discharging Coordination on Distribution Network Using Multi-Objective Particle Swarm Optimization and Fuzzy Decision Making. Energies 2016, 9, 186. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, W.; Wen, F.; Salam, A.; Mao, J.; Li, L. Bidding Strategy for Aggregators of Electric Vehicles in Day-Ahead Electricity Markets. Energies 2017, 10, 144. [Google Scholar] [CrossRef]
- An, K.; Song, K.-B.; Hur, K. Incorporating Charging/Discharging Strategy of Electric Vehicles into Security-Constrained Optimal Power Flow to Support High Renewable Penetration. Energies 2017, 10, 729. [Google Scholar] [CrossRef]
- Zeng, M.; Leng, S.; Maharjan, S.; Gjessing, S.; He, J. An incentivized auction-based group-selling approach for demand response management in V2G systems. IEEE Trans. Ind. Inform. 2015, 11, 1554–1563. [Google Scholar] [CrossRef]
- Paudyal, S.; Dahal, S. Impact of plug-in hybrid electric vehicles and their optimal deployment in smart grids. In Proceedings of the 21st Australasian Universities Power Engineering Conference (AUPEC), Brisbane, Australia, 5–28 September 2011; pp. 1–6. [Google Scholar]
- Fotouhi, A.; Auger, D.J.; Propp, K.; Longo, S.; Wild, M. A review on electric vehicle battery modelling: From Lithium-ion toward Lithium-Sulphur. Renew. Sustain. Energy Rev. 2016, 56, 1008–1021. [Google Scholar] [CrossRef]
- 1547.4-2011-IEEE Guide for Design, Operation, and Integration of Distributed Resource Island Systems with Electric Power Systems. Available online: http://ieeexplore.ieee.org/document/5960751/ (accessed on 31 December 2016).
- Kroposki, B.; Basso, T.; Madsen, H.; DeBlasio, R. Microgrid standards and technologies. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–4. [Google Scholar]
- Strategies for the Uptake of EVs in Associated Infrastructure Implications. Techreport. Element Energy Limited, 2009. Available online: http://www.element-energy.co.uk/case-study/electric-vehicles-in-the-uk/ (accessed on 19 December 2016).
- Sha’aban, Y.; Lennox, B.; Laurí, D. PID versus MPC Performance for SISO Dead-time Dominant Processes. IFAC Proc. Vol. 2013, 46, 241–246. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control: With Constraints; Pearson Education: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Qin, S.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; Lévesque, M.; Bak-Jensen, B.; Pillai, J.R.; Maier, M.; Tipper, D.; Myers, K.S. Design and cosimulation of hierarchical architecture for demand response control and coordination. IEEE Trans. Ind. Inform. 2017, 4, 1806–1816. [Google Scholar] [CrossRef]
- Bhattarai, B.; Kouzelis, K.; Mendaza, I.; Bak-Jensen, B.; Pillai, J.; Myers, K. Smart Grid Constraint Violation Management for Balancing and Regulating Purposes. IEEE Trans. Ind. Inform. 2017, PP, 1. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Car | Battery | Range | Range/kW | Range per | Cost per |
|---|---|---|---|---|---|
| Name | (kW) | (km) | (km/kW) | Charge (km) | Charge |
| Maple (Pool) | 24 | 840 | 6.44 | 96 | 2.4 |
| Oak (Pool) | 24 | 737 | 6.44 | 96 | 2.4 |
| Willow (Pool) | 30 | 494 | 6.44 | 123 | 3.0 |
| Holly (Pool) | 24 | 813 | 6.76 | 129 | 3.0 |
| Larch (Pool) | 30 | 402 | 6.44 | 123 | 3.0 |
| Sec1 (Security) | 24 | 1622 | 4.83 | 74 | 2.4 |
| Mail (Mail) | 24 | 1931 | 5.47 | 82 | 2.4 |
| Crewe (Van) | 24 | 822 | 5.15 | 77 | 2.4 |
| Repro (Van) | 24 | 713 | 4.51 | 67 | 2.4 |
| Time | Weekday | Weekend | ||
|---|---|---|---|---|
| Price (£/kWh) | Tariff Period | Price (£/kWh) | Tariff Period | |
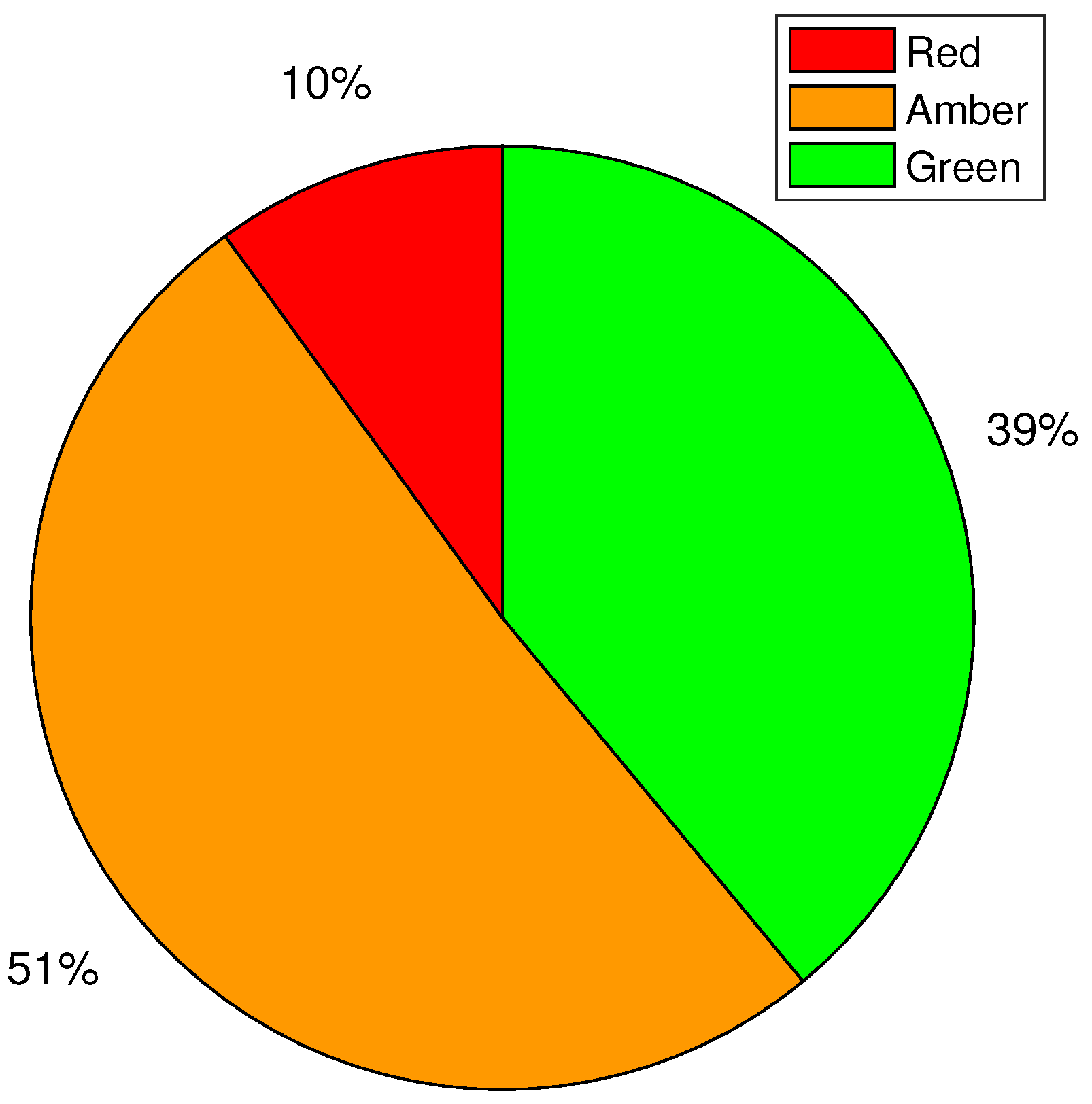
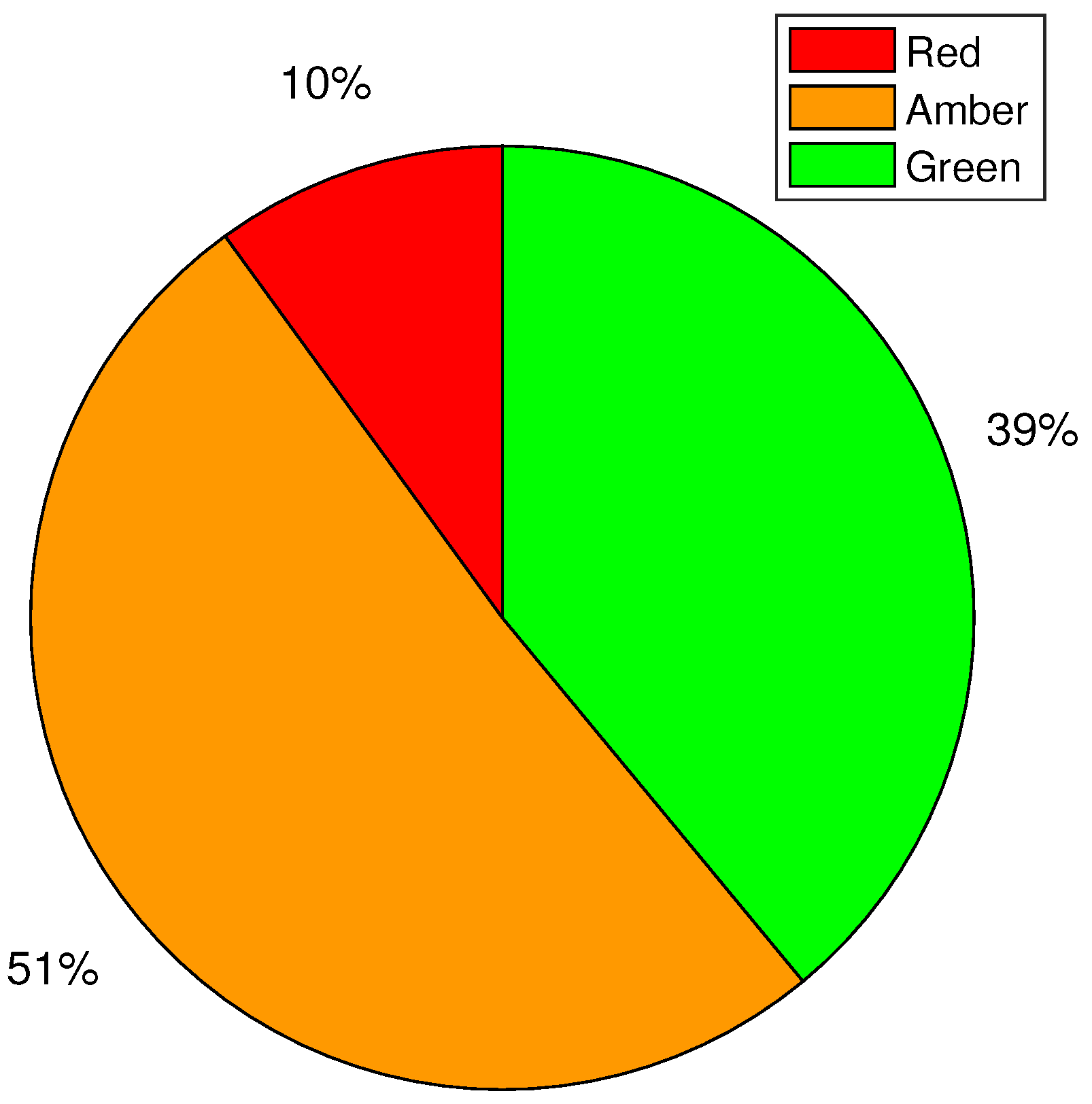
| 21:00–09:00 | 0.08–0.10 | Green | 0.07–0.08 | Green |
| 09:00–16:30 | 0.10–0.11 | Amber | 0.09–0.10 | Green |
| 16:30–18:30 | 0.19–0.24 | Red | 0.10–0.11 | Amber |
| 19:00–21:00 | 0.10–0.11 | Amber | 0.09–0.10 | Green |
| Vehicle | Charging Duration | ||||||
|---|---|---|---|---|---|---|---|
| Red | Amber | Green | Total (hrs) | ||||
| hrs | % | hrs | % | hrs | % | ||
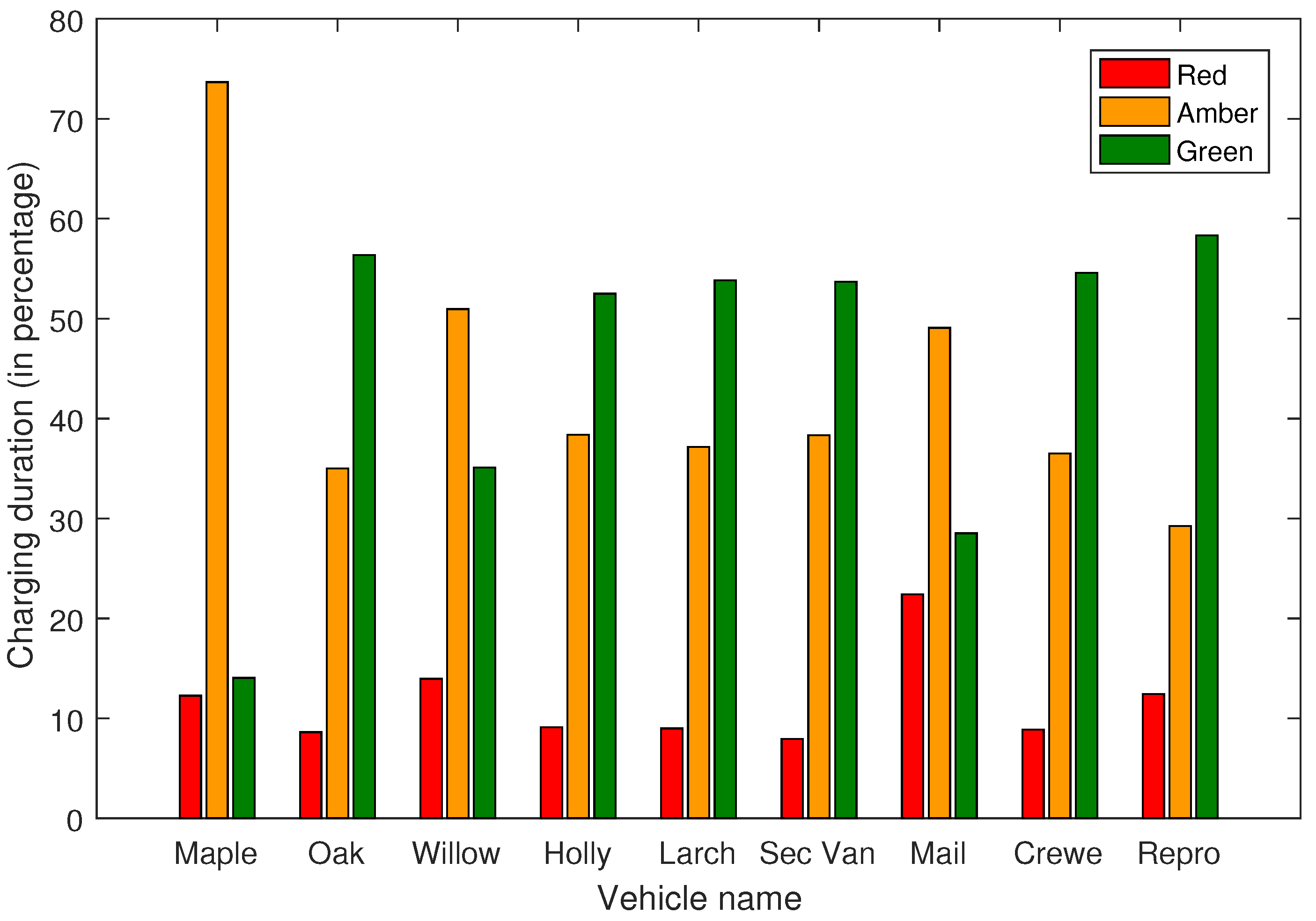
| Maple | 15.96 | 12.28 | 95.78 | 73.67 | 18.27 | 14.05 | 130.01 |
| Oak | 69.05 | 8.63 | 280.20 | 35.01 | 451.14 | 56.37 | 800.39 |
| Willow | 20.74 | 13.96 | 75.69 | 50.95 | 277.41 | 35.09 | 148.56 |
| Holly | 48.12 | 9.11 | 201.83 | 38.39 | 277.41 | 52.50 | 528.36 |
| Larch | 49.49 | 9.00 | 204.44 | 37.16 | 296.54 | 53.84 | 550.13 |
| Security | 92.21 | 7.96 | 444.35 | 38.33 | 622.54 | 53.71 | 1159.1 |
| 119.23 | 22.41 | 261.11 | 49.07 | 151.73 | 28.51 | 532.07 | |
| Crewe | 27.35 | 8.88 | 112.45 | 36.52 | 168.12 | 54.60 | 307.92 |
| Repro | 44.32 | 12.43 | 104.21 | 29.25 | 207.80 | 58.32 | 356.33 |
| Symbol | Parameter | Value (Unit) |
|---|---|---|
| Grid voltage | 230 (V) | |
| x | SoC | |
| Maximum charge current | 10 (A) | |
| Minimum charge current | (A) | |
| Nominal battery capacity | (kWh) | |
| Sample time | 1 (h) | |
| Prediction horizon | 24 (Samples) | |
| Battery efficiency | 150/205 (Wh/km) | |
| Charging/discharging efficiency | 90 (%) | |
| p | Electricity price | variable (£/kWh) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sha’aban, Y.A.; Ikpehai, A.; Adebisi, B.; Rabie, K.M. Bi-Directional Coordination of Plug-In Electric Vehicles with Economic Model Predictive Control. Energies 2017, 10, 1507. https://doi.org/10.3390/en10101507
Sha’aban YA, Ikpehai A, Adebisi B, Rabie KM. Bi-Directional Coordination of Plug-In Electric Vehicles with Economic Model Predictive Control. Energies. 2017; 10(10):1507. https://doi.org/10.3390/en10101507
Chicago/Turabian StyleSha’aban, Yusuf A., Augustine Ikpehai, Bamidele Adebisi, and Khaled M. Rabie. 2017. "Bi-Directional Coordination of Plug-In Electric Vehicles with Economic Model Predictive Control" Energies 10, no. 10: 1507. https://doi.org/10.3390/en10101507
APA StyleSha’aban, Y. A., Ikpehai, A., Adebisi, B., & Rabie, K. M. (2017). Bi-Directional Coordination of Plug-In Electric Vehicles with Economic Model Predictive Control. Energies, 10(10), 1507. https://doi.org/10.3390/en10101507