Field-Weakening Performance Improvement of the Yokeless and Segmented Armature Axial Flux Motor for Electric Vehicles

Abstract
:1. Introduction
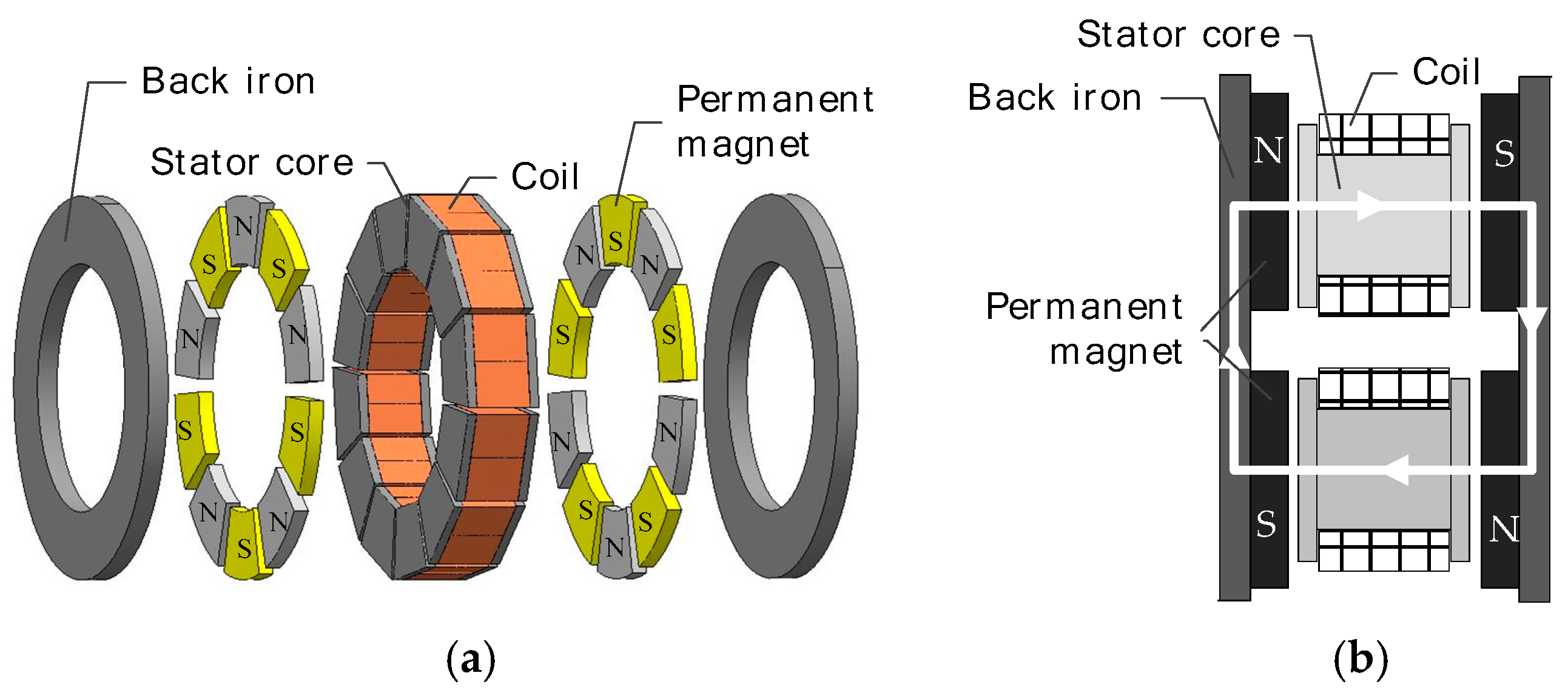
2. Yokeless and Segmented Armature Axial Flux Motors
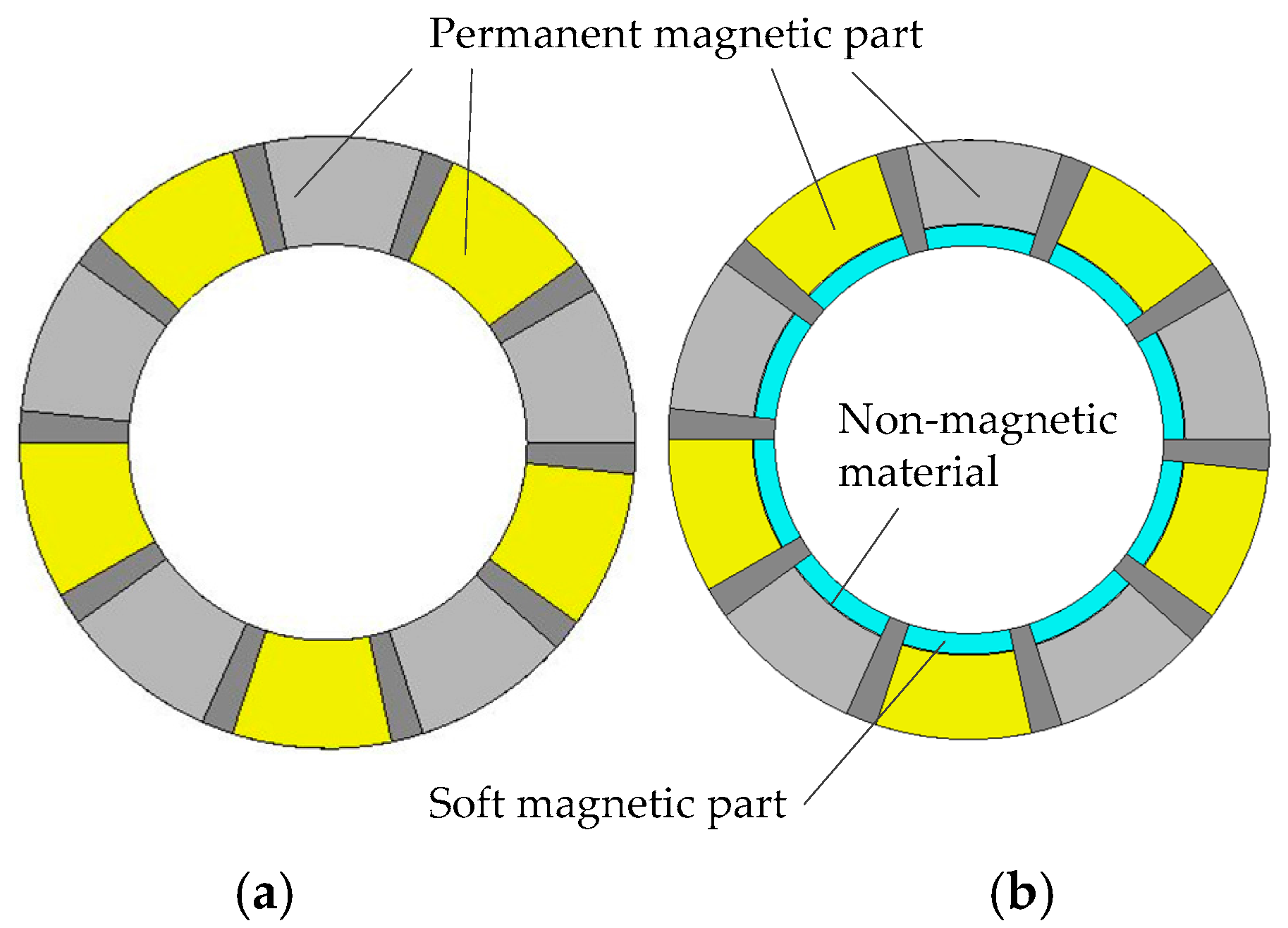
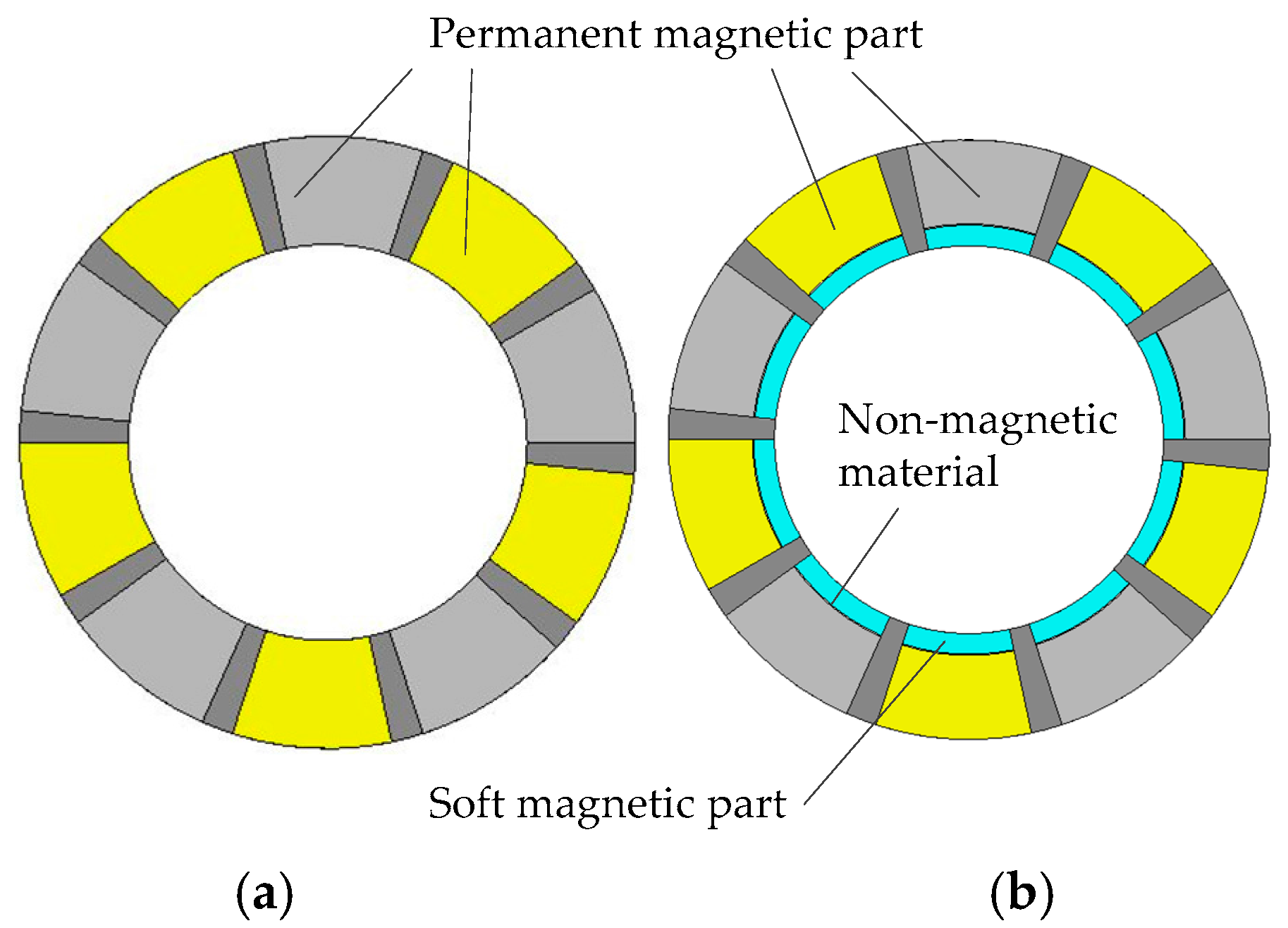
3. New Structure of Rotor Poles
4. Effect of the Soft Magnetic Part
4.1. No-Load Back EMF Analysis
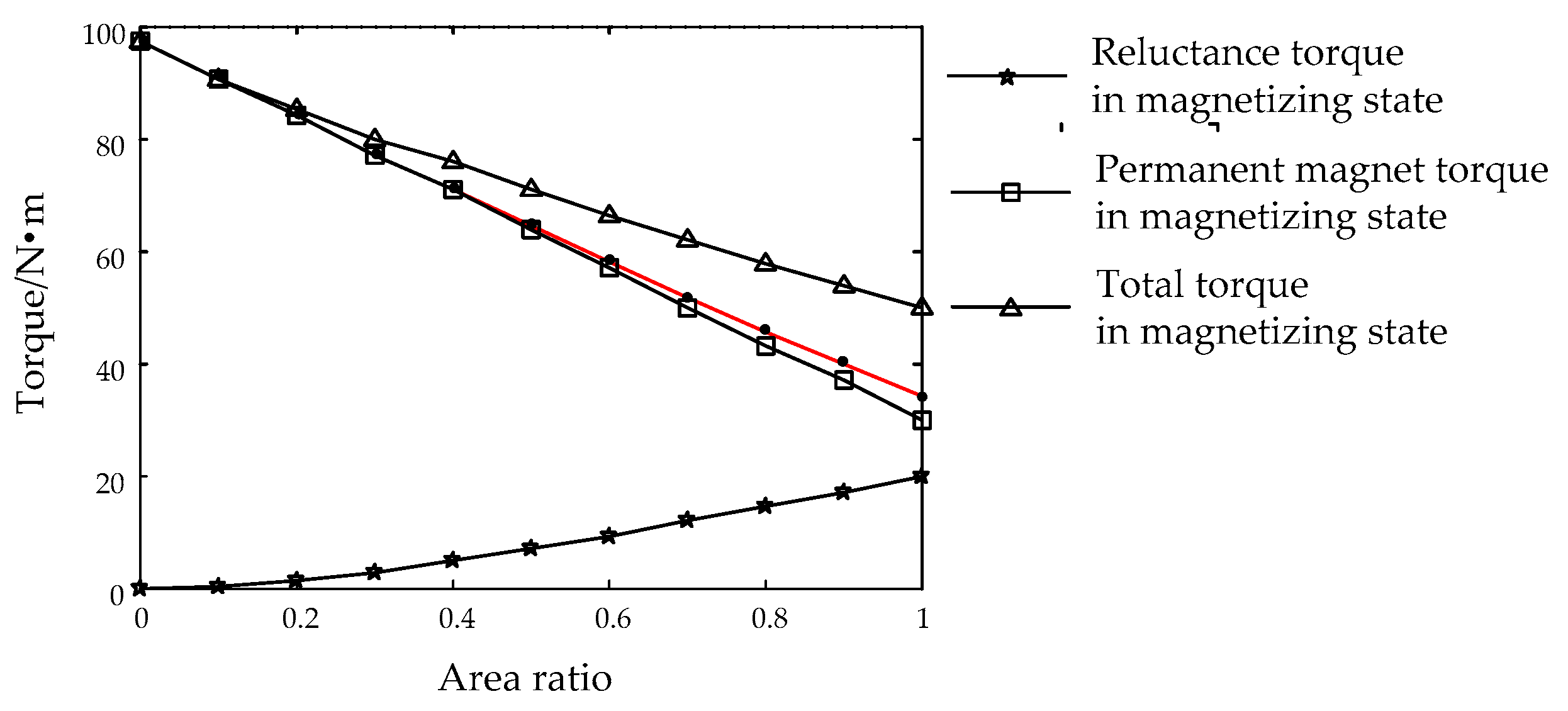
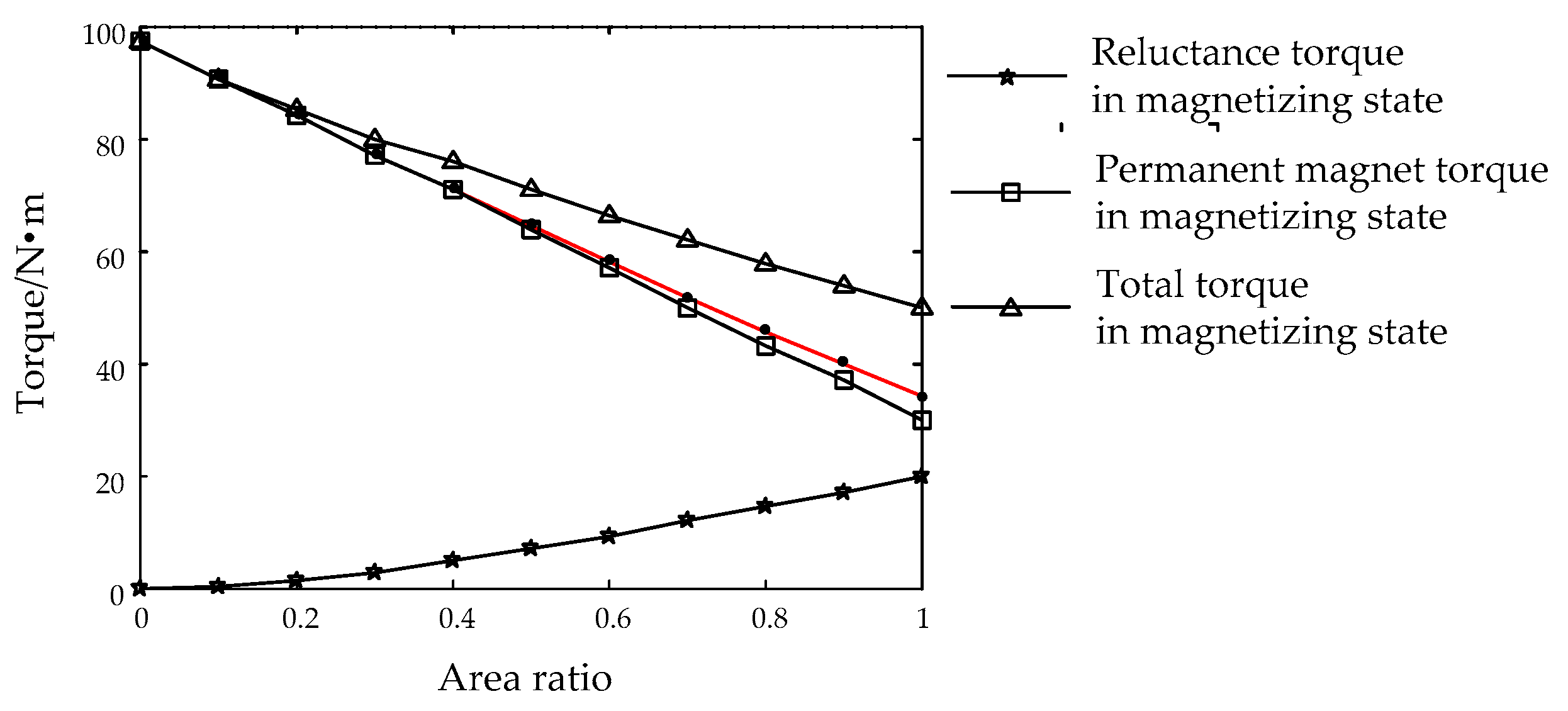
4.2. Electromagnetic Torque Analysis
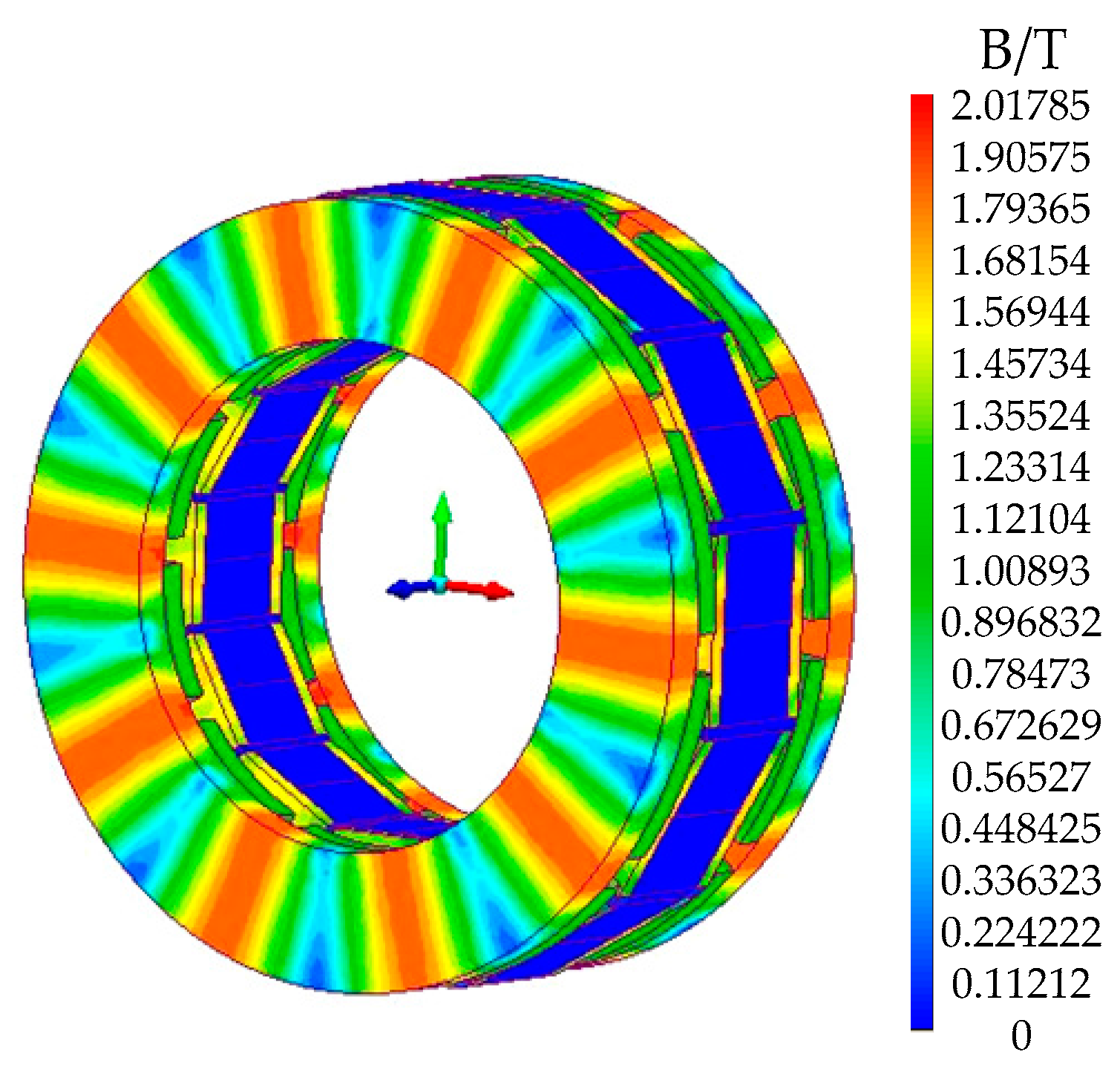
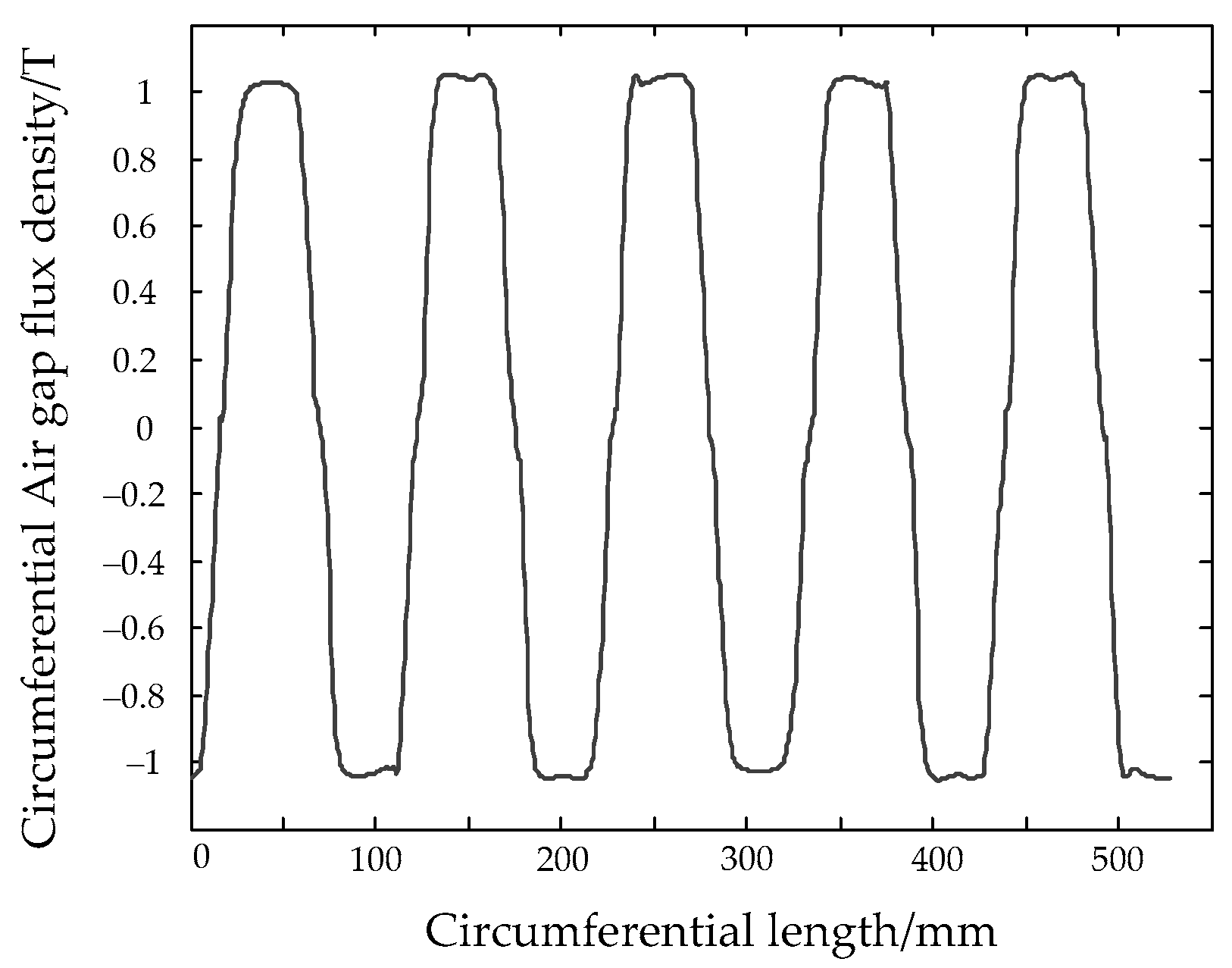
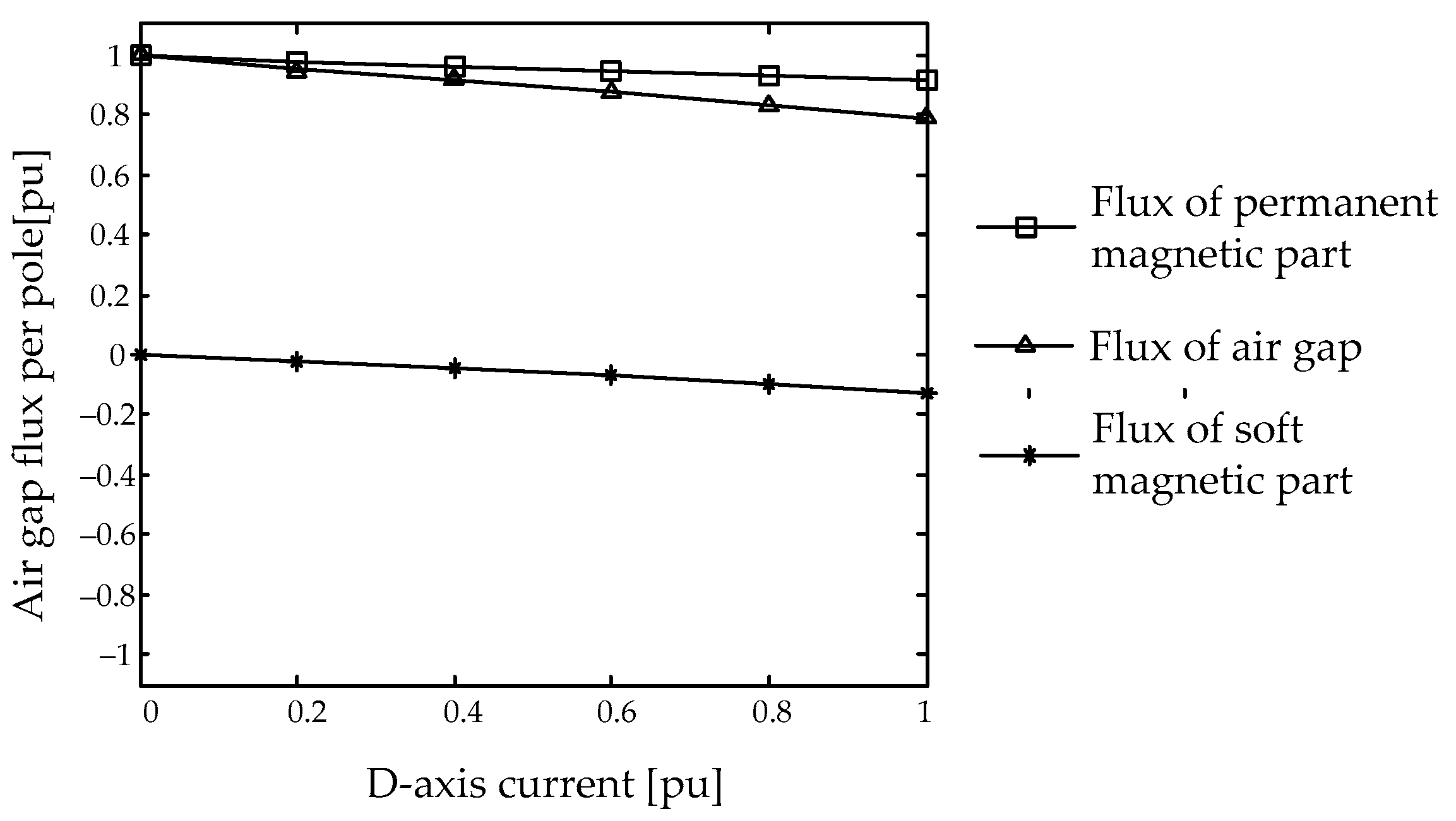
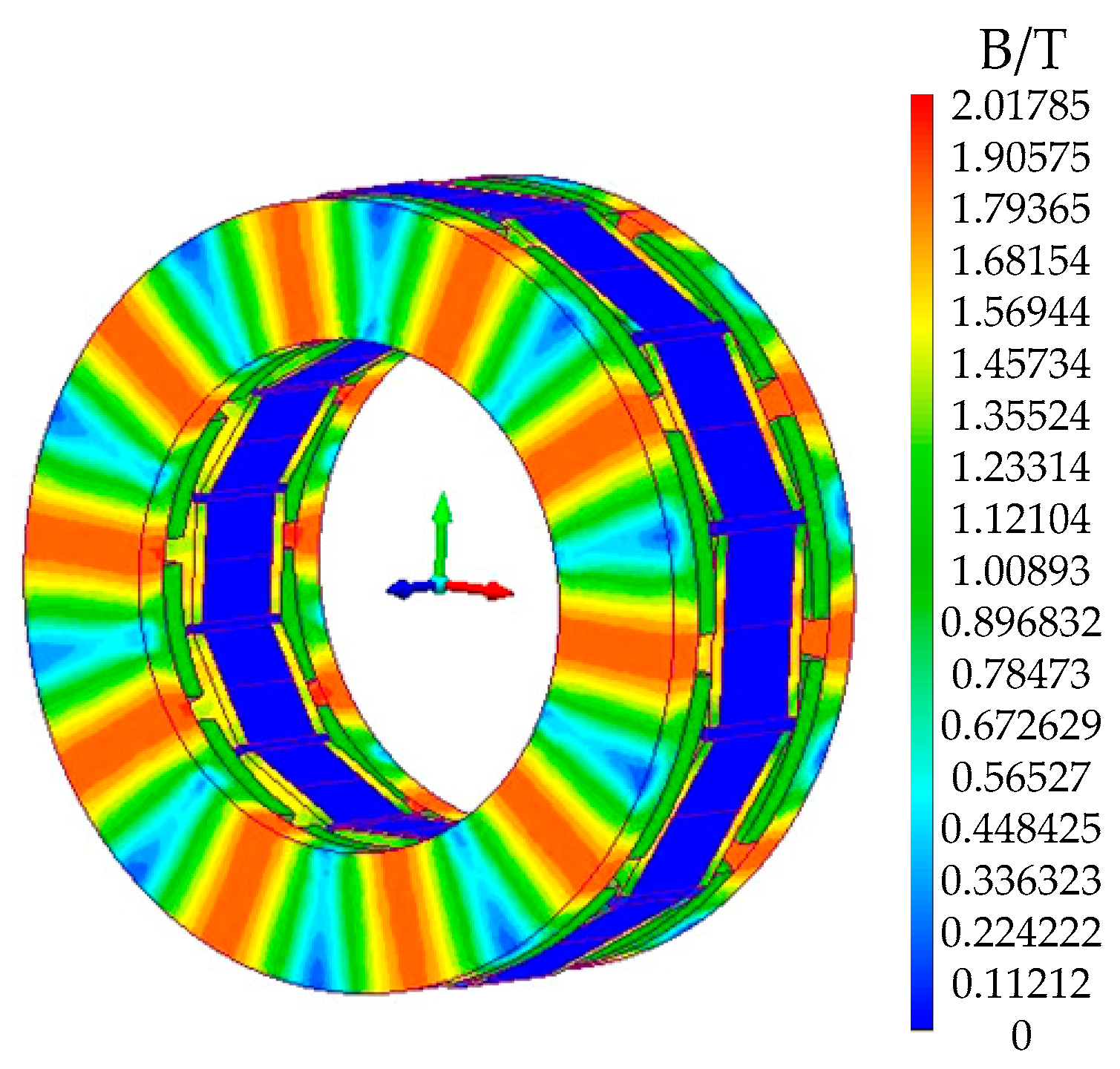
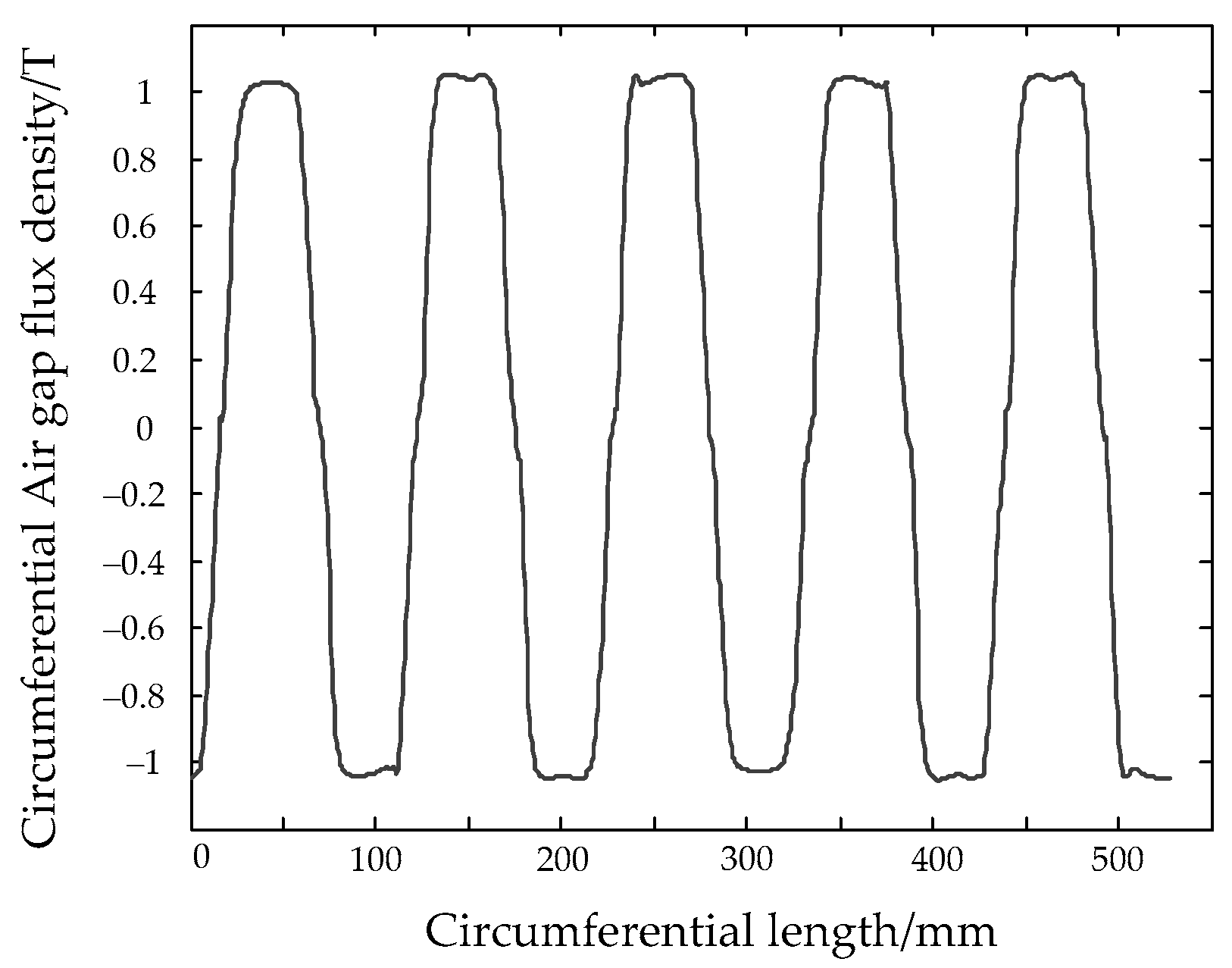
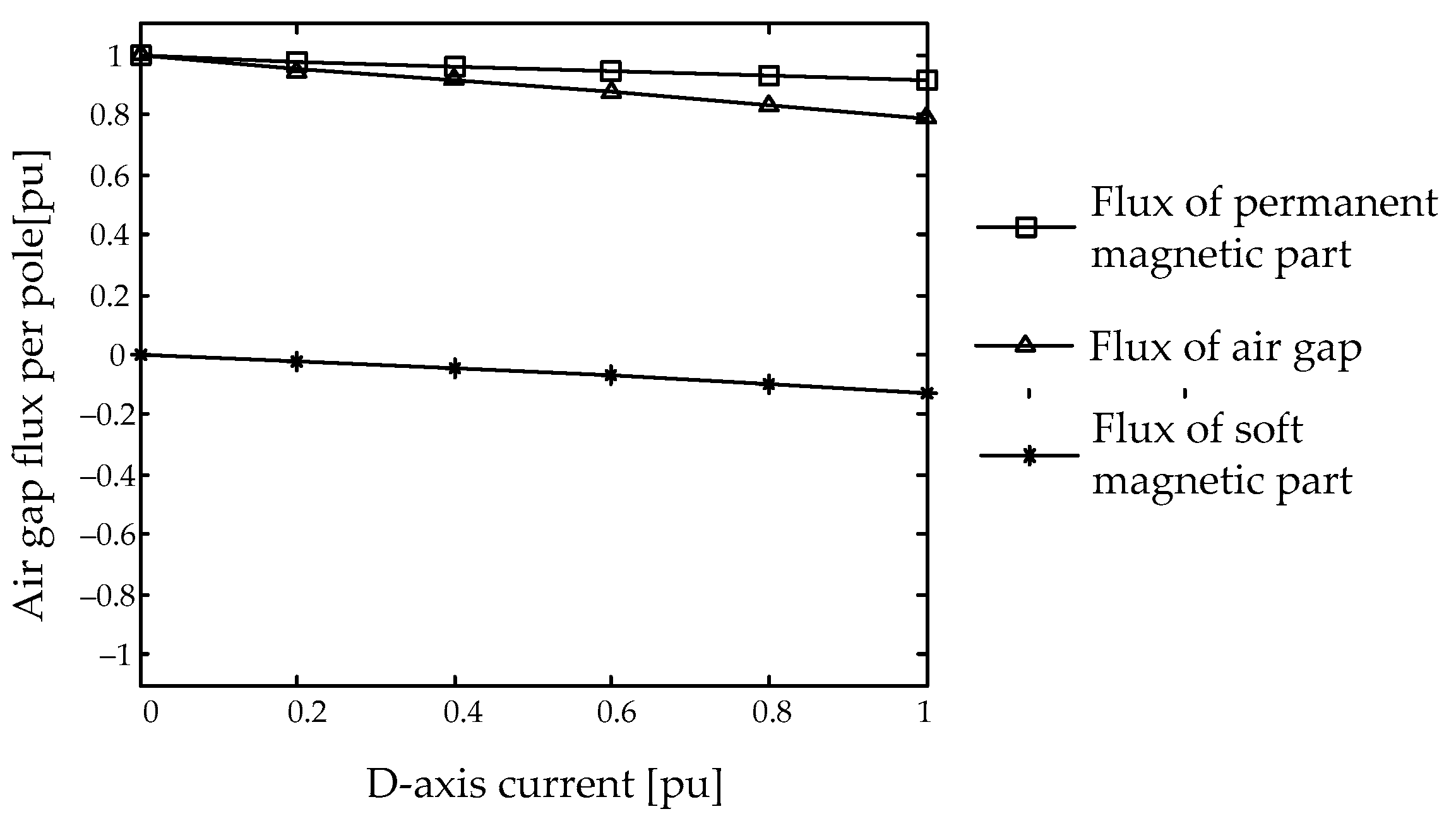
4.3. Air Gap Flux Analysis
5. Simulation and Optimization Results
5.1. Simulation Anylysis in No-Load Condition
5.2. Simulation Analysis in Rated-Load Condition
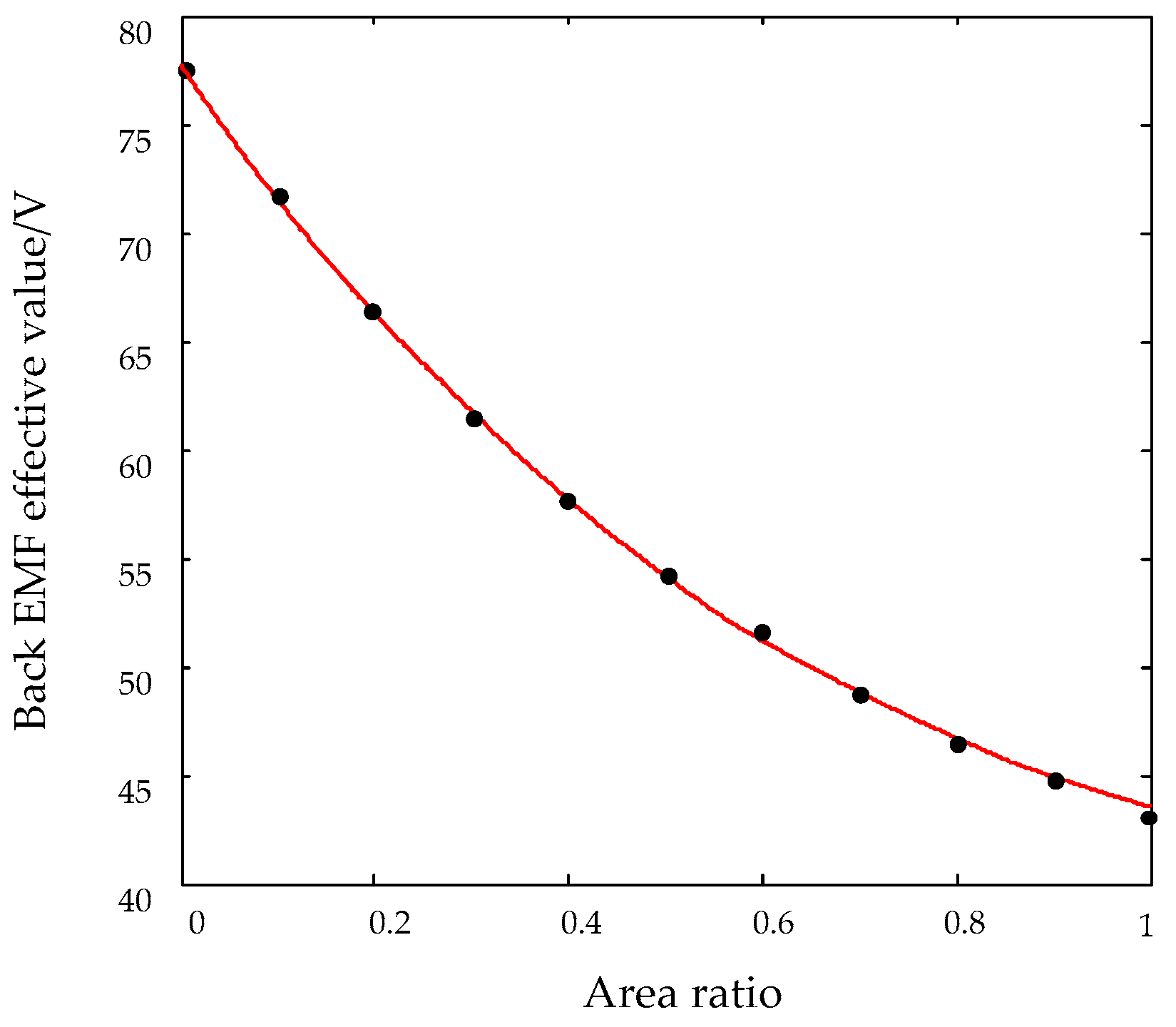
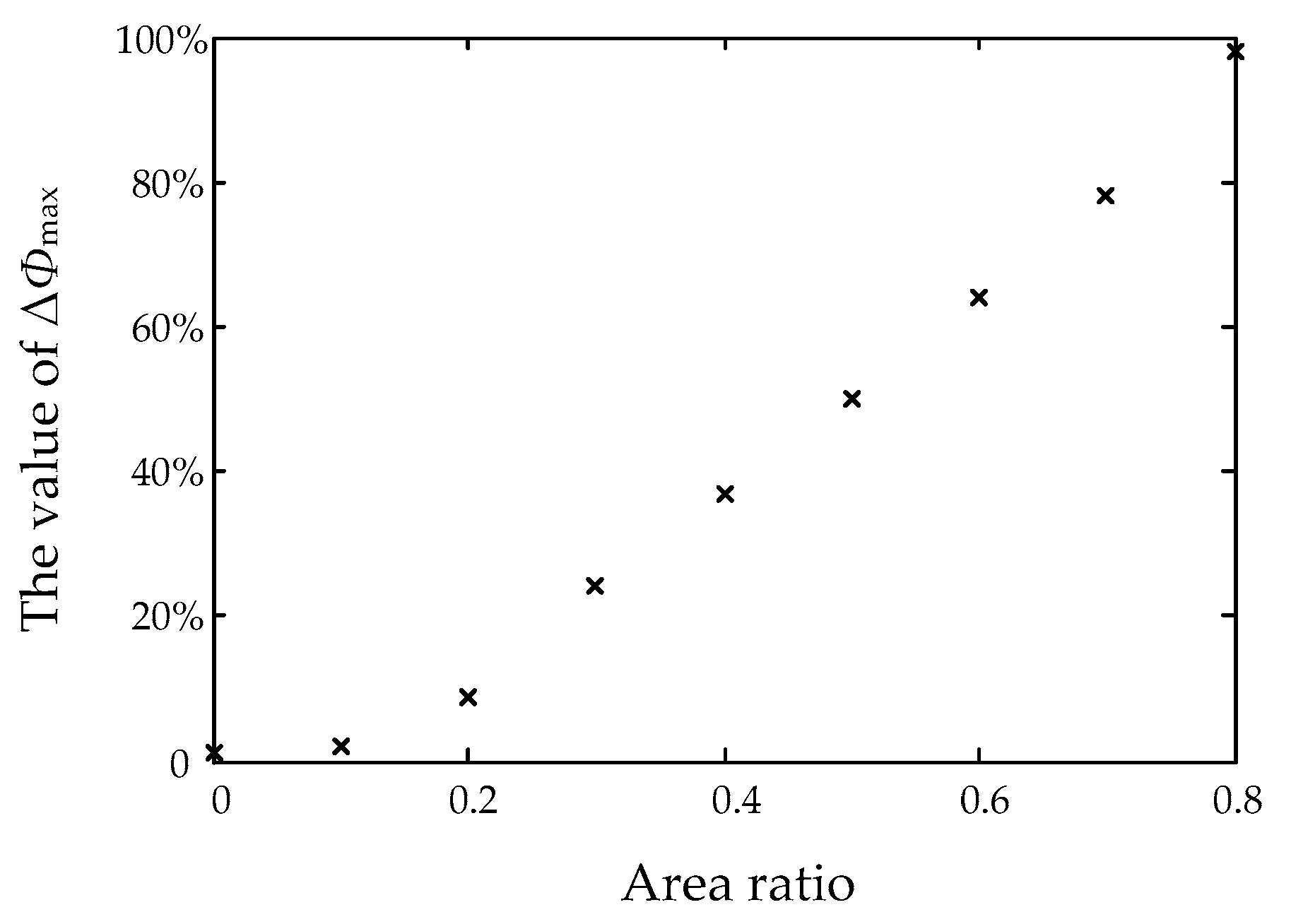
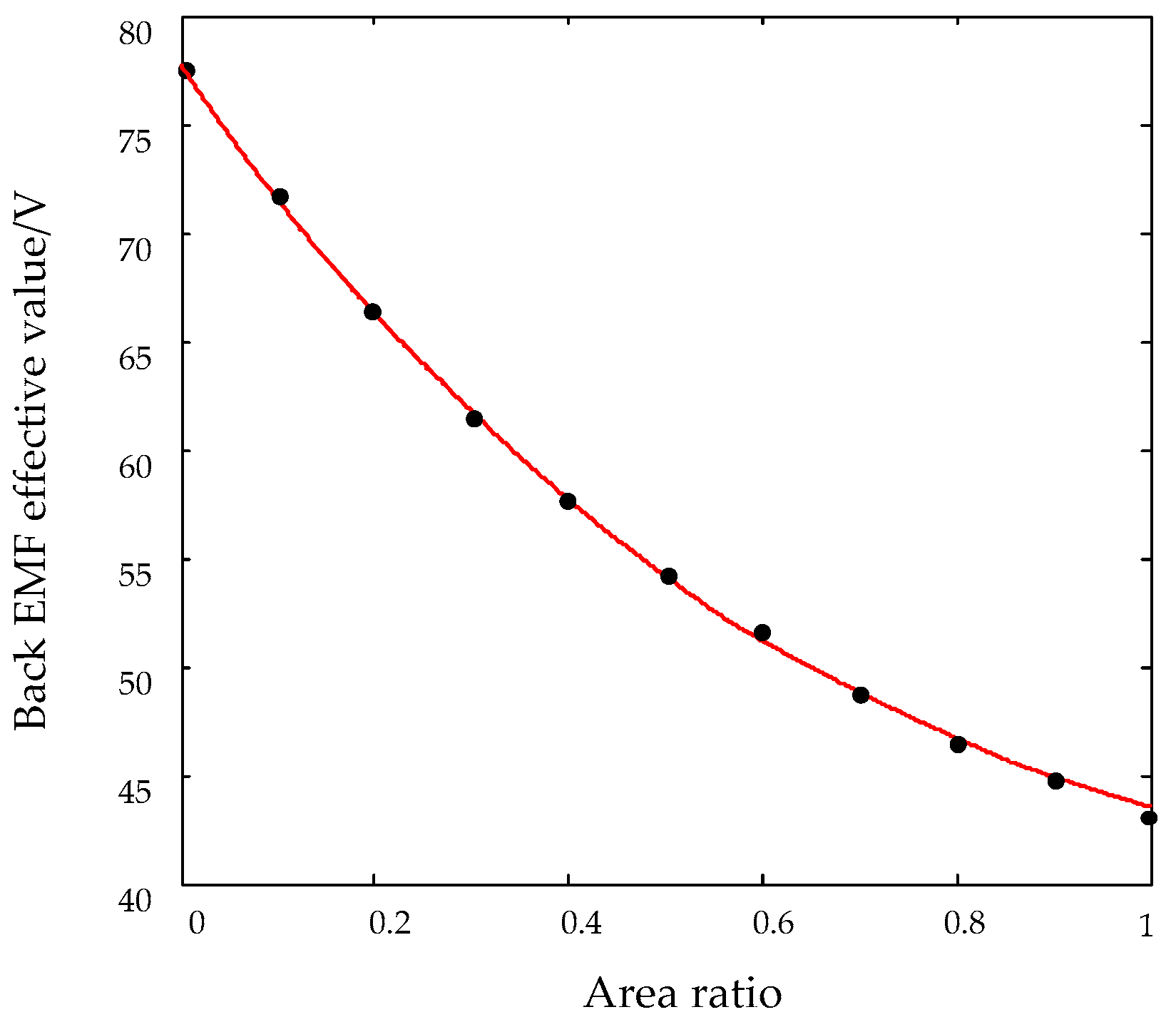
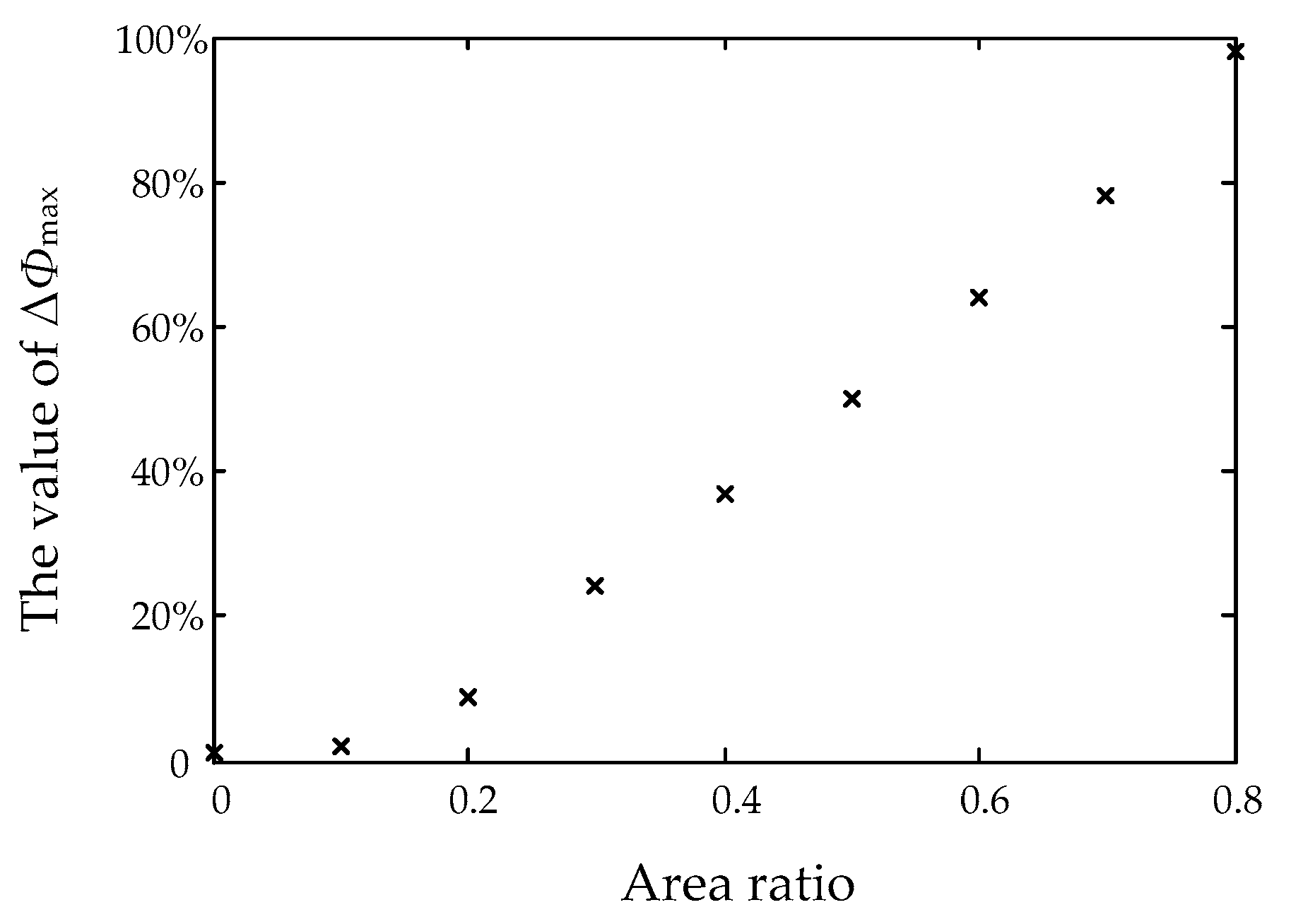
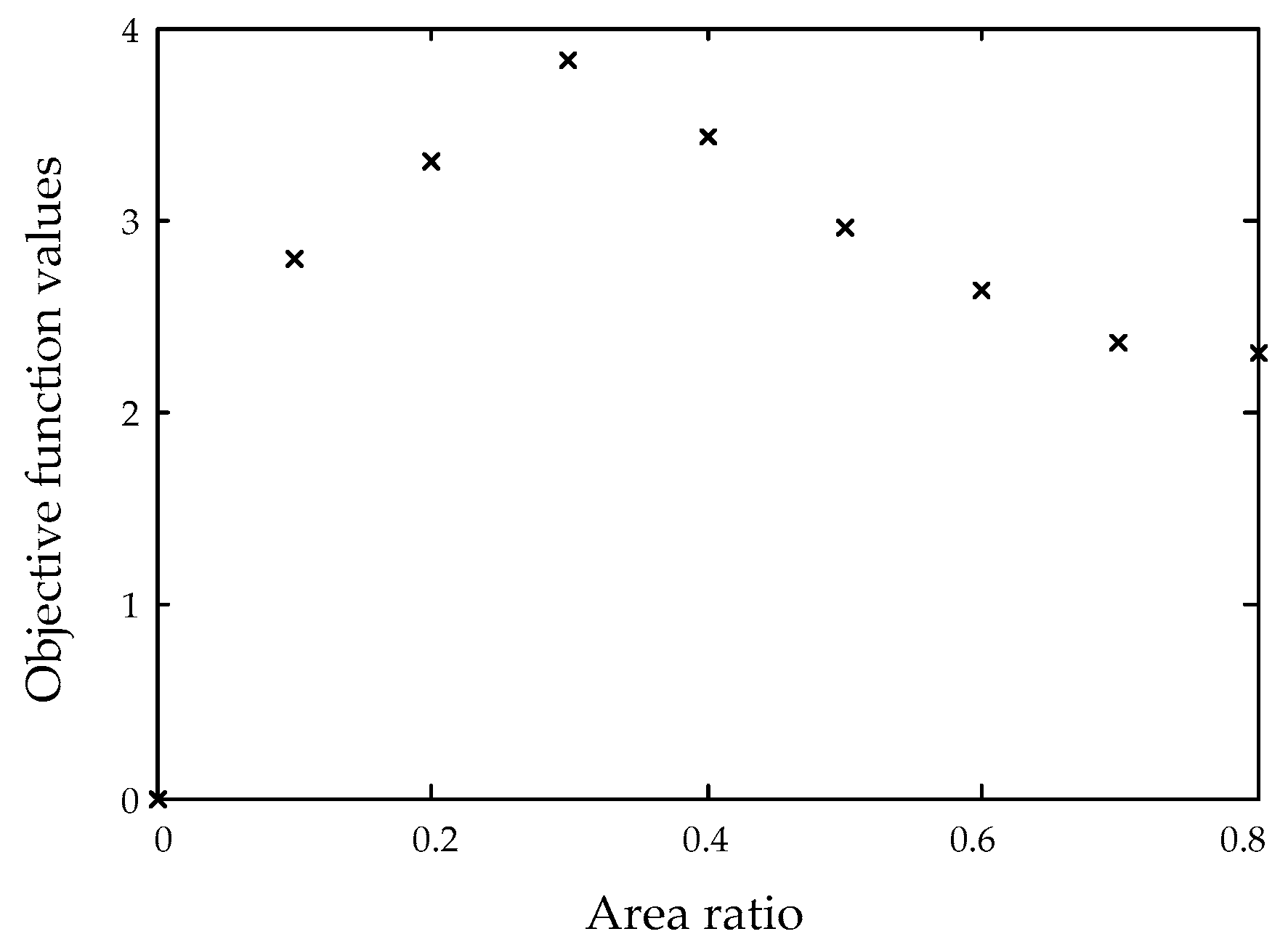
5.3. Optimum Area Ratio Value
- Sacrifice as few permanent magnets as possible to ensure magnet flux linkage.
- Make the decrement of maximum torque as small as possible while keeping the current density constant at rated speed with an aim to ensure the constant power operation at high speed.
- Make the variation of air gap flux as large as possible while giving same d-axis current with the purpose of improving the field-weakening performance.
6. Conclusions
- The results of our analytical calculation are quite consistent with results of the simulation, which proves the quite accuracy of the analytical calculation model and finite element simulation.
- The existence of a soft magnetic part contributes to the decline of d-axis reluctance, therefore, a lower d-axis stator current is required while achieving the same demagnetizing effect of the machines. The air gap flux can be flexibly controlled while using an armature reaction as control mechanism.
- It is effective to select the optimum area ratio so as to optimize the design of rotors by setting the rational objective function, weighing the improvement of field-weakening performance and impact on output performance caused by the permanent magnet reduction.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Capponi, F.G.; Donato, D.G.; Caricchi, F. Recent advances in axial-flux permanent-magnet machine technology. IEEE Trans. Ind. Appl. 2012, 48, 2190–2205. [Google Scholar] [CrossRef]
- Parviainen, A.; Niemela, M.; Pyrhonen, J. Modeling of axial flux permanent-magnet machines. IEEE Trans. Ind. Appl. 2004, 40, 1333–1340. [Google Scholar] [CrossRef]
- Li, H.; Shen, J. FEA-based design and comparative study of axial flux permanent magnet machines with various topologies. Trans. Chin. Eletrotechnol. Soc. 2015, 30, 32–40. [Google Scholar]
- Zhou, T. Research on Axial Flux Permanent Magnet Fly Wheel Machine for Regenerative Braking in Electric Vehicle. Master’s Thesis, Southeast University, Naijing, China, 2015. [Google Scholar]
- Gonzalez-Lopez, D.A.; Tapia, J.A.; Wallace, R.; Valenzuela, A. Design and test of an axial flux permanent-magnet machine with field control capability. IEEE Trans. Magn. 2008, 44, 2168–2173. [Google Scholar] [CrossRef]
- Moncada, R.H.; Tapia, J.A.; Jahns, T.M. Analysis of negative-saliency permanent-magnet machines. IEEE Trans. Ind. Electron. 2010, 57, 122–127. [Google Scholar] [CrossRef]
- Mebarki, A.; Gerada, D.; Brown, N.L. Analysis of an axial PM flux machine with field weakening capability for engine integration. In Proceedings of the 7th IET International Conference on Power Electronics, Manchester, UK, 8–10 April 2014. [Google Scholar]
- Liu, X.P.; Chen, D.; Wang, M.; Huang, Y.F.; Xie, Q.H. Analysis of mechanical dynamics and flux weakening ability for a variable flux axial field permanent magnet electrical machine. Trans. Chin. Eletrotechnol. Soc. 2016, 31, 54–62. [Google Scholar]
- Chai, F.; Bi, Y.L. Research review of flux weakening methods of axial permanent magnet synchronous machine. Micromotors 2015, 48, 69–76. [Google Scholar]
- Zuo, S.G.; Wu, S.L.; Wu, X.D.; Shen, J.; Lin, F. Analytical model and optimization of torque of an axial flux permanent magnet synchronous motor. Trans. Chin. Eletrotechnol. Soc. 2016, 31, 46–53. [Google Scholar]
- Huang, Y.K.; Ge, B.Y.; Dong, J.N.; Lin, H.Y.; Zhu, J.G.; Guo, Y.G. 3-D analytical modeling of no-load magnetic field of ironless axial flux permanent magnet machine. IEEE Trans. Magn. 2012, 48, 2929–2932. [Google Scholar] [CrossRef]
- Ji, J.H.; Sun, Y.K.; Zhu, J.H.; Zhao, W.X. Design, analysis and experimental validation of a modular permanent-magnet machine. Trans. Chin. Eletrotechnol. Soc. 2015, 30, 243–252. [Google Scholar]
- Sung, S.Y.; Jeong, J.H.; Park, Y.S.; Choi, J.Y.; Jang, S.M. Improved analytical modeling of axial flux machine with a doublesided permanent magnet rotor and slotless stator based on an analytical method. IEEE Trans. Magn. 2012, 48, 2945–2948. [Google Scholar] [CrossRef]
- Zhang, B.Y.; Jia, Y.Q.; Feng, G.H. Novel permanent magnet synchronous machines with modules combination stator. Trans. Chin. Eletrotechnol. Soc. 2015, 30, 243–252. [Google Scholar]
- Kappatou, J.C.; Zalokostas, G.D.; Spyratos, D.A. 3-D FEM analysis, prototyping and tests of an axial flux permanent-magnet wind generator. Energies 2017, 10, 1269. [Google Scholar] [CrossRef]
- Woolmer, T.J.; McCulloch, M.D. Axial flux permanent magnet machines: A new topology for high performance applications. In Proceedings of the Hybrid Vehicle Conference, IET The Institution of Engineering and Technology, Coventry, UK, 12–13 December 2006. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Numbers of pole pairs | 5 |
| Numbers of stator segment | 12 |
| Numbers of phase | 3 |
| Conductor diameter | 2.2 mm |
| Permanent magnet length | 8 mm |
| Back iron length | 10 mm |
| Airgap length | 1.5 mm |
| Active length | 81 mm |
| Inner diameter | 132 mm |
| Outer diameter | 204 mm |
| Parameters | Value |
|---|---|
| Inner diameter of the soft magnetic part | 132 mm |
| Outer diameter of the soft magnetic part | 146.4 mm |
| Length of the soft magnetic part | 8 mm |
| Inner diameter of the permanent magnetic part | 146.4 mm |
| Outer diameter of the permanent magnetic part | 204 mm |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Xu, S.; Li, C.; Li, X. Field-Weakening Performance Improvement of the Yokeless and Segmented Armature Axial Flux Motor for Electric Vehicles. Energies 2017, 10, 1492. https://doi.org/10.3390/en10101492
Wang X, Xu S, Li C, Li X. Field-Weakening Performance Improvement of the Yokeless and Segmented Armature Axial Flux Motor for Electric Vehicles. Energies. 2017; 10(10):1492. https://doi.org/10.3390/en10101492
Chicago/Turabian StyleWang, Xiaoyuan, Sijia Xu, Chunpeng Li, and Xiang Li. 2017. "Field-Weakening Performance Improvement of the Yokeless and Segmented Armature Axial Flux Motor for Electric Vehicles" Energies 10, no. 10: 1492. https://doi.org/10.3390/en10101492
APA StyleWang, X., Xu, S., Li, C., & Li, X. (2017). Field-Weakening Performance Improvement of the Yokeless and Segmented Armature Axial Flux Motor for Electric Vehicles. Energies, 10(10), 1492. https://doi.org/10.3390/en10101492