
Some New Results on Convergence, Weak w2-Stability and Data Dependence of Two Multivalued Almost Contractive Mappings in Hyperbolic Spaces
 , ,
, ,  , and
, and
Abstract
:1. Introduction
- (C1)
- ;
- (C2)
- ;
- (C3)
- ;
- (C4)
- ,
2. Preliminaries
- asymptotic radius of at m as
- asymptotic radius of relative to as
- asymptotic center of relative to as
3. Convergence Results for Two Multivalued, Almost Contraction Mappings
4. Weak -Stability Results for Two Multivalued Almost Contractive Mappings
5. Data Dependence Results for Two Multivalued Almost Contractive Mappings
6. ∆-Convergence and Strong Converges Results for Two Multivalued Mappings
7. Numerical Example
8. Conclusions
- (i)
- In this work, we have introduced a new iterative algorithm (6) in hyperbolic spaces.
- (ii)
- We have proven the strong convergence of the newly defined iterative algorithm (6) to the common fixed point of two multivalued almost contractive mappings.
- (ii)
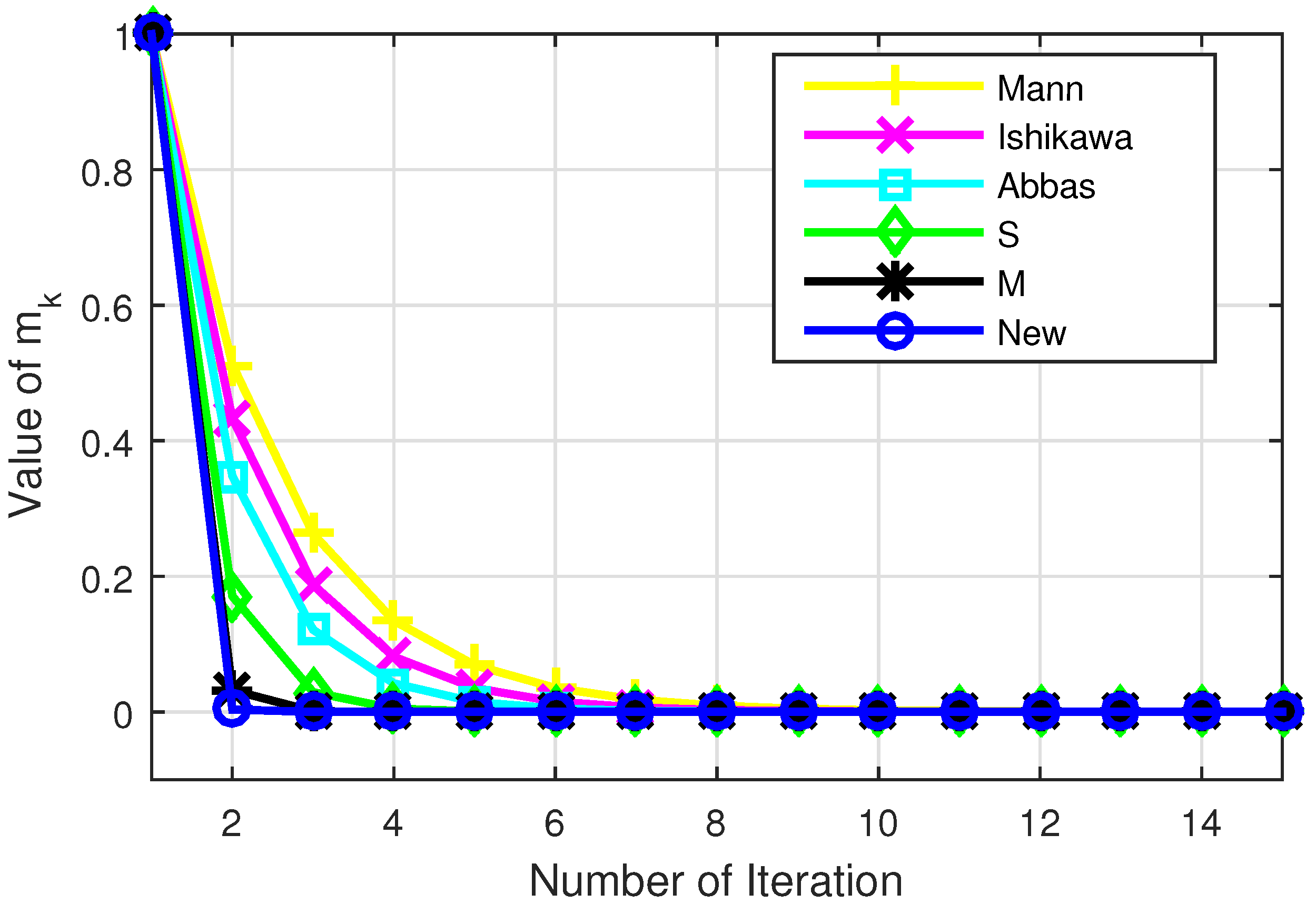
- We have also provided some examples of multivalued, almost contractive mappings. We show with the aid of the examples that our iterative algorithm (6) converges faster than many existing iterative algorithms.
- (iii)
- We have introduced the concepts of weak -stability and data dependence results involving two multivalued almost contractive mappings. These concepts are relatively new in the literature.
- (iv)
- We have proved several strong and ∆-convergence results of (6) for the common fixed point of multivalued mappings satisfying condition .
- (v)
- We presented interesting examples of mappings which satisfy condition but do not satisfy condition . We further performed numerical experiments to compare the efficiency and applicability of our iterative method with some leading iterative algorithms.
- (vi)
- The results in this article extend and generalize the results in [24,39] and several others from the setting of Banach spaces to the setting hyperbolic spaces. Moreover, our results improve and generalize the results in [22,24,39] and several others from the setting of single-valued mappings to the setting of multivalued mappings. In addition, we improve and extend the results in [22,24,39] from the setting of fixed points of single mapping to the setting common fixed points of two mappings.
- (vii)
- Our results give affirmative answers to the two interesting open questions raised by Ahmad et al. [21].
- (viii)
- The main results derived in this article continue to be true in linear and CAT(0) spaces, because the hyperbolic space properly includes these spaces.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kohlenbach, U. Some logical metatheorems with applications in functional analysis. Trans. Am. Soc. 2005, 357, 89–128. [Google Scholar] [CrossRef] [Green Version]
- Goebel, K.; Kirk, W.A. Iteration processes for nonexpansive mappings Topological Methods in Nonlinear Functional Analysis. Contemp. Math. 1983, 21, 115–123. [Google Scholar]
- Reich, S.; Shafrir, I. Nonexpansive iterations in hyperbolic spaces. Nonlinear Anal. 1990, 15, 537–558. [Google Scholar] [CrossRef]
- Goebel, K.; Reich, S. Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings; Marcel Dekker: New York, NY, USA, 1984. [Google Scholar]
- Imdad, M.; Dashputre, S. Fixed point approximation of Picard normal S-iteration process for generalized nonexpansive mappings in hyperbolic spaces. Math. Sci. 2016, 10, 131–138. [Google Scholar] [CrossRef] [Green Version]
- Nadler, S.B. Multivalued contraction mappings. Pacific J. Math. 1969, 30, 475–488. [Google Scholar] [CrossRef] [Green Version]
- Markin, J. Continuous dependence of fixed point sets. Proc. Am. Math. Soc. 1973, 38, 545–547. [Google Scholar] [CrossRef]
- Berinde, V. Approximating fixed points of weak contractions using the Picard iteration. Nonlinear Anal. Forum 2004, 9, 43–53. [Google Scholar]
- Berinde, M.; Berinde, V. On a general class of multivalued weakly Picard mappings. J. Math. Anal. 2007, 326, 772–782. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, T. Fixed point theorems and convergence theorems for some generalized nonexpansive mappings. J. Math. Anal. Appl. 2008, 340, 1088–1095. [Google Scholar] [CrossRef] [Green Version]
- Eslamian, M.; Abkar, A. One-step iterative process for finite family of multivalued mappings. Math. Comput. Model. 2011, 54, 105–111. [Google Scholar] [CrossRef]
- García-Falset, J.; Llorens-Fuster, E.; Suzuki, T. Fixed point theory for a class of generalized nonexpansive mappings. J. Math. Anal. Appl. 2011, 375, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.K.; Pathak, R.P.; Dashputre, S.; Diwan, S.D.; Gupta, R. Convergence theorems for generalized nonexpansive multivalued mappings in hyperbolic spaces. SpringerPlus 2016, 5, 912. [Google Scholar] [CrossRef] [PubMed]
- Abdeljawad, T.; Ullah, K.; Ahmad, J.; Mlaiki, N. Iterative approximation of endpoints for Multivalued Mappings in Banach spaces. J. Funct. Spaces 2020, 2020, 2179059. [Google Scholar] [CrossRef]
- Chang, S.; Wanga, G.; Wanga, L.; Tang, Y.K.; Mab, Z.L. ∆-convergence theorems for multivalued nonexpansive. Appl. Math. Comput. 2014, 249, 535–540. [Google Scholar]
- Karahan, I.; Jolaoso, L.O. A three steps iterative process for approximating the fixed points of multivalued generalized α–nonexpansive mappings in uniformly convex hyperbolic spaces. Sigma J. Eng. Nat. Sci. 2020, 38, 1031–1050. [Google Scholar]
- Okeke, G.A.; Abbas, M.; de la Sen, M. Approximation of the mixed Point of multivalued quasi-nonexpansive mappings via a faster iterative process with applications. Discret. Dyn. Nat. Soc. 2020, 2020, 8634050. [Google Scholar] [CrossRef]
- Shrama, N.; Mishra, L.N.; Mishra, V.N.; Almusawa, H. Endpoint Approximation of Standard Three-Step Multi-Valued Iteration Algorithm for Nonexpansive Mappings. Appl. Math. Inf. Sci. 2021, 15, 73–81. [Google Scholar]
- Agarwal, R.P.; O’Regan, D.; Sahu, D.R. Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J. Nonlinear Convex Anal. 2007, 8, 61–79. [Google Scholar]
- Chuadchawnay, P.; Farajzadehz, A.; Kaewcharoeny, A. On convergence theorems for two generalized nonexpansive multivalued mappings in hyperbolic spaces. Thai J. Math. 2019, 17, 445–461. [Google Scholar]
- Ahmad, J.; Ullah, K.; Arshad, M. Convergence, weak w2 stability, and data dependence results for the F iterative scheme in hyperbolic spaces. Numer. Algorithms 2022. [Google Scholar] [CrossRef]
- Ali, J.; Jubair, M.; Ali, F. Stability and convergence of F iterative scheme with an application to the fractional differential equation. Eng. Comput. 2020, 38, 693–702. [Google Scholar] [CrossRef]
- Khan, A.R.; Fukhar-ud-din, H.; Khan, M.A.A. An implicit algorithm for two finite families of nonexpansive maps in hyperbolic spaces. Fixed Point Theory Appl. 2012, 2012, 54. [Google Scholar] [CrossRef] [Green Version]
- Ofem, A.E.; Udofia, U.E.; Igbokwe, D.I. New iterative algorithm for solving constrained convex minimization problem and Split Feasibility Problem. Eur. J. Math. Anal. 2021, 1, 106–132. [Google Scholar] [CrossRef]
- Leuştean, L. A quadratic rate of asymptotic regularity for CAT(0) space. J. Math. Anal. Appl. 2007, 325, 386–399. [Google Scholar] [CrossRef] [Green Version]
- Soltuz, S.M.; Grosan, T. Data dependence for Ishikawa iteration when dealing with contractive like operators. Fixed Point Theory Appl. 2008, 2008, 242916. [Google Scholar] [CrossRef] [Green Version]
- Cardinali, T.; Rubbioni, P. A generalization of the Caristi fixed point theorem in metric spaces. Fixed Point Theory 2010, 11, 3–10. [Google Scholar]
- Timis, I. On the weak stability of Picard iteration for some contractive type mappings, Annals of the University of Craiova. Math. Comput. Sci. Ser. 2010, 37, 106–114. [Google Scholar]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Ishikawa, S. Fixed points and iteration of a nonexpansive mapping in a Banach space. Proc. Am. Math. Soc. 1976, 59, 65–71. [Google Scholar] [CrossRef]
- Abbas, M.; Nazir, T. A new faster iteration process applied to constrained minimization and feasibility problems. Mat. Vesnik 2014, 66, 223–234. [Google Scholar]
- Ullah, K.; Arshad, M. Numerical Reckoning Fixed Points for Suzuki’s Generalized Nonexpansive Mappings via New Iteration Process. Filomat 2018, 32, 187–196. [Google Scholar] [CrossRef] [Green Version]
- Noor, M.A. New approximation schemes for general variational inequalities. J. Math. Anal. Appl. 2000, 251, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Phuengrattana, W.; Suantai, S. On the rate off convergence of Mann, Ishikawa, Noor and SP iterations for continuous functions on an arbitrary interval. J. Comput. Appl. Math. 2011, 235, 3006–3014. [Google Scholar] [CrossRef] [Green Version]
- Khan, H.S. A Picard-Man hybrid iterative process. Fixed Point Theory Appl. 2013, 2013, 69. [Google Scholar] [CrossRef]
- Güsoy, F. A Picard-S iterative Scheme for Approximating Fixed Point of Weak-Contraction Mappings. Filomat 2014, 30, 2829–2845. [Google Scholar] [CrossRef] [Green Version]
- Thakurr, B.S.; Thakur, D.; Postolache, M. A new iterative scheme for numerical reckoning of fixed points of Suzuki’s generalized nonexpansive mappings. Appl. Math. Comput. 2016, 275, 147–155. [Google Scholar] [CrossRef]
- Chugh, R.; Kumar, V.; Kumar, S. Strong convergence of a new three step iterative scheme in Banach spaces. Am. J. Comput. Math. 2012, 2, 345–357. [Google Scholar] [CrossRef] [Green Version]
- Ofem, A.E.; Udofia, U.E.; Igbokwe, D.I. A robust iterative approach for solving nonlinear Volterra Delay integro-differential equations. Ural. Math. J. 2021, 7, 59–85. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mann | Ishikawa | Abbas | S | M | New | |
|---|---|---|---|---|---|---|
| 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | |
| 0.512500 | 0.433281 | 0.348068 | 0.170781 | 0.032031 | 0.003557 | |
| 0.262656 | 0.187733 | 0.121152 | 0.029166 | 0.001026 | 0.000000 | |
| 0.134611 | 0.081341 | 0.042169 | 0.004981 | 0.000033 | 0.000000 | |
| 0.068988 | 0.035244 | 0.014678 | 0.000851 | 0.000001 | 0.000000 | |
| 0.035357 | 0.015270 | 0.005109 | 0.000145 | 0.000000 | 0.000000 | |
| 0.018120 | 0.006616 | 0.001778 | 0.000025 | 0.000000 | 0.000000 | |
| 0.009287 | 0.002867 | 0.000619 | 0.000004 | 0.000000 | 0.000000 | |
| 0.004759 | 0.001242 | 0.000215 | 0.000001 | 0.000000 | 0.000000 | |
| 0.002439 | 0.000538 | 0.000075 | 0.000000 | 0.000000 | 0.000000 | |
| 0.001250 | 0.000233 | 0.000026 | 0.000000 | 0.000000 | 0.000000 | |
| 0.000641 | 0.000101 | 0.000009 | 0.000000 | 0.000000 | 0.000000 | |
| 0.000328 | 0.000044 | 0.000003 | 0.000000 | 0.000000 | 0.000000 | |
| 0.000168 | 0.000019 | 0.000001 | 0.000000 | 0.000000 | 0.000000 | |
| 0.000086 | 0.000008 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| Noor | SP | Picard-Man | Picard-S | F | New | |
|---|---|---|---|---|---|---|
| 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | |
| 0.458320 | 0.134611 | 0.128125 | 0.042695 | 0.008008 | 0.003557 | |
| 0.210058 | 0.018120 | 0.016416 | 0.001823 | 0.000064 | 0.000000 | |
| 0.096274 | 0.002439 | 0.002103 | 0.000078 | 0.000001 | 0.000000 | |
| 0.044124 | 0.000328 | 0.000269 | 0.000003 | 0.000000 | 0.000000 | |
| 0.020223 | 0.000044 | 0.000035 | 0.000000 | 0.000000 | 0.000000 | |
| 0.009269 | 0.000006 | 0.000004 | 0.000000 | 0.000000 | 0.000000 | |
| 0.004248 | 0.000001 | 0.000001 | 0.000000 | 0.000000 | 0.000000 | |
| 0.001947 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| Mann | Ishikawa | S | Picard-Mann | F | New | |
|---|---|---|---|---|---|---|
| 5.00000000 | 5.00000000 | 5.00000000 | 5.00000000 | 5.00000000 | 5.00000000 | |
| 4.37500000 | 4.14062500 | 3.51562500 | 3.28125000 | 1.84570313 | 0.99609375 | |
| 3.82812500 | 3.42895508 | 2.47192383 | 2.15332031 | 0.68132401 | 0.19844055 | |
| 3.34960938 | 2.83960342 | 1.73807144 | 1.41311646 | 0.25150437 | 0.03953308 | |
| 2.93090820 | 2.35154659 | 1.22208148 | 0.92735767 | 0.09284048 | 0.00787573 | |
| 2.56454468 | 1.94737452 | 0.85927604 | 0.60857847 | 0.03427119 | 0.00156899 | |
| 2.24397659 | 1.61266952 | 0.60417847 | 0.39937962 | 0.01265089 | 0.00031257 | |
| 1.96347952 | 1.33549195 | 0.42481298 | 0.26209288 | 0.00466996 | 0.00006227 | |
| 1.71804458 | 1.10595427 | 0.29869663 | 0.17199845 | 0.00172387 | 0.00001241 | |
| 1.50328901 | 0.91586838 | 0.21002107 | 0.11287398 | 0.00063635 | 0.00000247 | |
| 1.31537788 | 0.75845350 | 0.14767106 | 0.07407355 | 0.00023490 | 0.00000049 | |
| 1.15095565 | 0.62809431 | 0.10383122 | 0.04861077 | 0.00008671 | 0.00000010 | |
| 1.00708619 | 0.52014060 | 0.07300632 | 0.03190082 | 0.00003201 | 0.00000002 | |
| 0.88120042 | 0.43074143 | 0.05133257 | 0.02093491 | 0.00001182 | 0.00000000 |
| Noor | CR | Thakur | Picard-S | M | New | |
|---|---|---|---|---|---|---|
| 5.00000000 | 5.00000000 | 5.00000000 | 5.00000000 | 5.00000000 | 5.00000000 | |
| 4.05273438 | 2.11914063 | 2.63671875 | 1.81640625 | 2.46093750 | 0.99609375 | |
| 3.28493118 | 0.89815140 | 1.39045715 | 0.65986633 | 1.21124268 | 0.19844055 | |
| 2.66259070 | 0.38066182 | 0.73324889 | 0.23971707 | 0.59615850 | 0.03953308 | |
| 2.15815458 | 0.16133519 | 0.38667422 | 0.08708472 | 0.29342176 | 0.00787573 | |
| 1.74928545 | 0.06837839 | 0.20391023 | 0.03163624 | 0.14441852 | 0.00156899 | |
| 1.41787785 | 0.02898068 | 0.10753079 | 0.01149285 | 0.07108099 | 0.00031257 | |
| 1.14925646 | 0.01228283 | 0.05670569 | 0.00417514 | 0.03498518 | 0.00006227 | |
| 0.93152623 | 0.00520581 | 0.02990339 | 0.00151675 | 0.01721927 | 0.00001241 | |
| 0.75504568 | 0.00220637 | 0.01576937 | 0.00055101 | 0.00847511 | 0.00000247 | |
| 0.61199991 | 0.00093512 | 0.00831588 | 0.00020017 | 0.00417134 | 0.00000049 | |
| 0.49605462 | 0.00039633 | 0.00438533 | 0.00007272 | 0.00205308 | 0.00000010 | |
| 0.40207552 | 0.00016798 | 0.00231257 | 0.00002642 | 0.00101050 | 0.00000002 | |
| 0.32590106 | 0.00007119 | 0.00121952 | 0.00000960 | 0.00049736 | 0.00000000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ofem, A.E.; Abuchu, J.A.; George, R.; Ugwunnadi, G.C.; Narain, O.K. Some New Results on Convergence, Weak w2-Stability and Data Dependence of Two Multivalued Almost Contractive Mappings in Hyperbolic Spaces. Mathematics 2022, 10, 3720. https://doi.org/10.3390/math10203720
Ofem AE, Abuchu JA, George R, Ugwunnadi GC, Narain OK. Some New Results on Convergence, Weak w2-Stability and Data Dependence of Two Multivalued Almost Contractive Mappings in Hyperbolic Spaces. Mathematics. 2022; 10(20):3720. https://doi.org/10.3390/math10203720
Chicago/Turabian StyleOfem, Austine Efut, Jacob Ashiwere Abuchu, Reny George, Godwin Chidi Ugwunnadi, and Ojen Kumar Narain. 2022. "Some New Results on Convergence, Weak w2-Stability and Data Dependence of Two Multivalued Almost Contractive Mappings in Hyperbolic Spaces" Mathematics 10, no. 20: 3720. https://doi.org/10.3390/math10203720
APA StyleOfem, A. E., Abuchu, J. A., George, R., Ugwunnadi, G. C., & Narain, O. K. (2022). Some New Results on Convergence, Weak w2-Stability and Data Dependence of Two Multivalued Almost Contractive Mappings in Hyperbolic Spaces. Mathematics, 10(20), 3720. https://doi.org/10.3390/math10203720