
Tracking and Dynamic Tuning of a Wireless Powered Endoscopic Capsule †
 , , and
, , and
Abstract
:1. Introduction
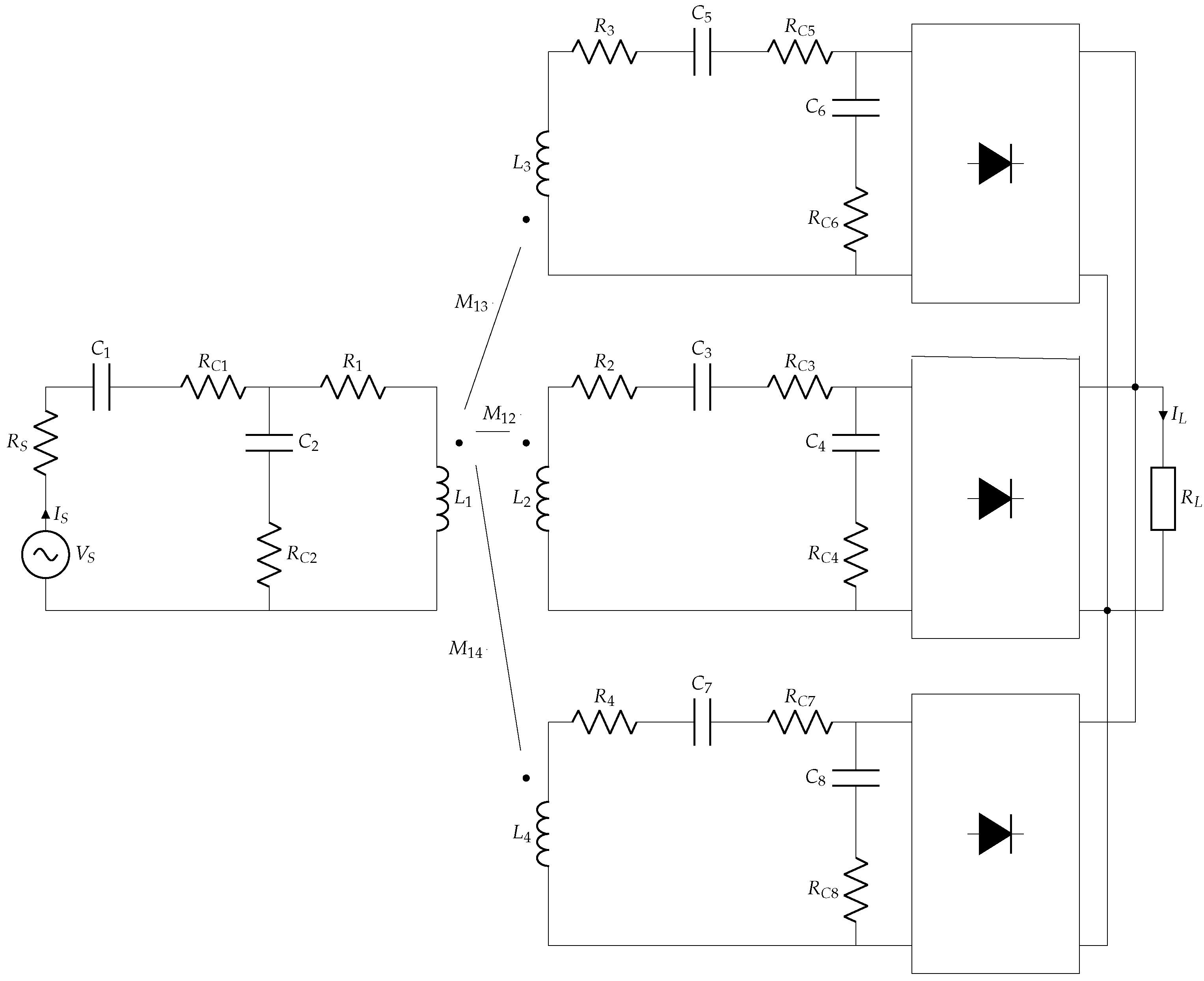
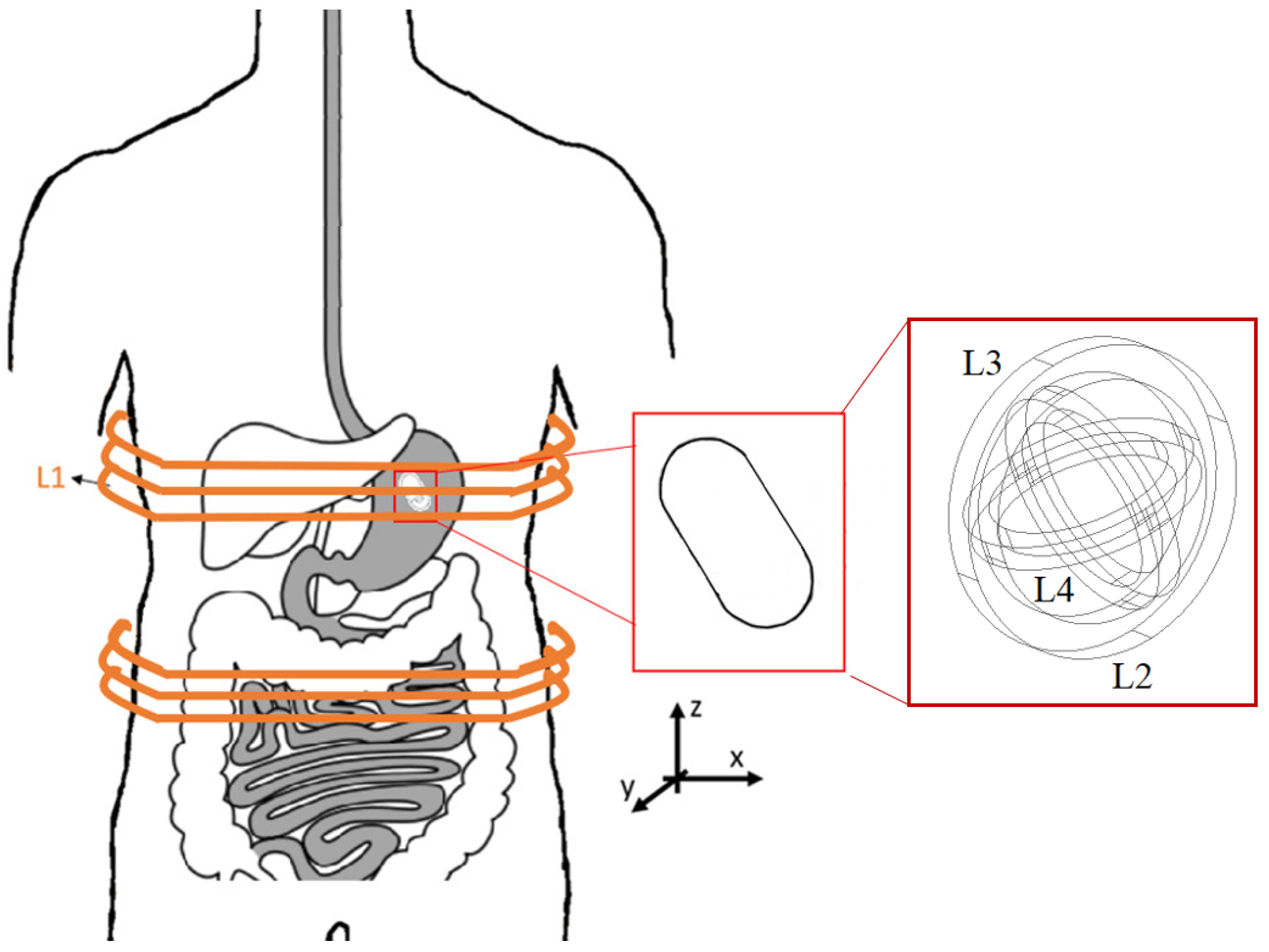
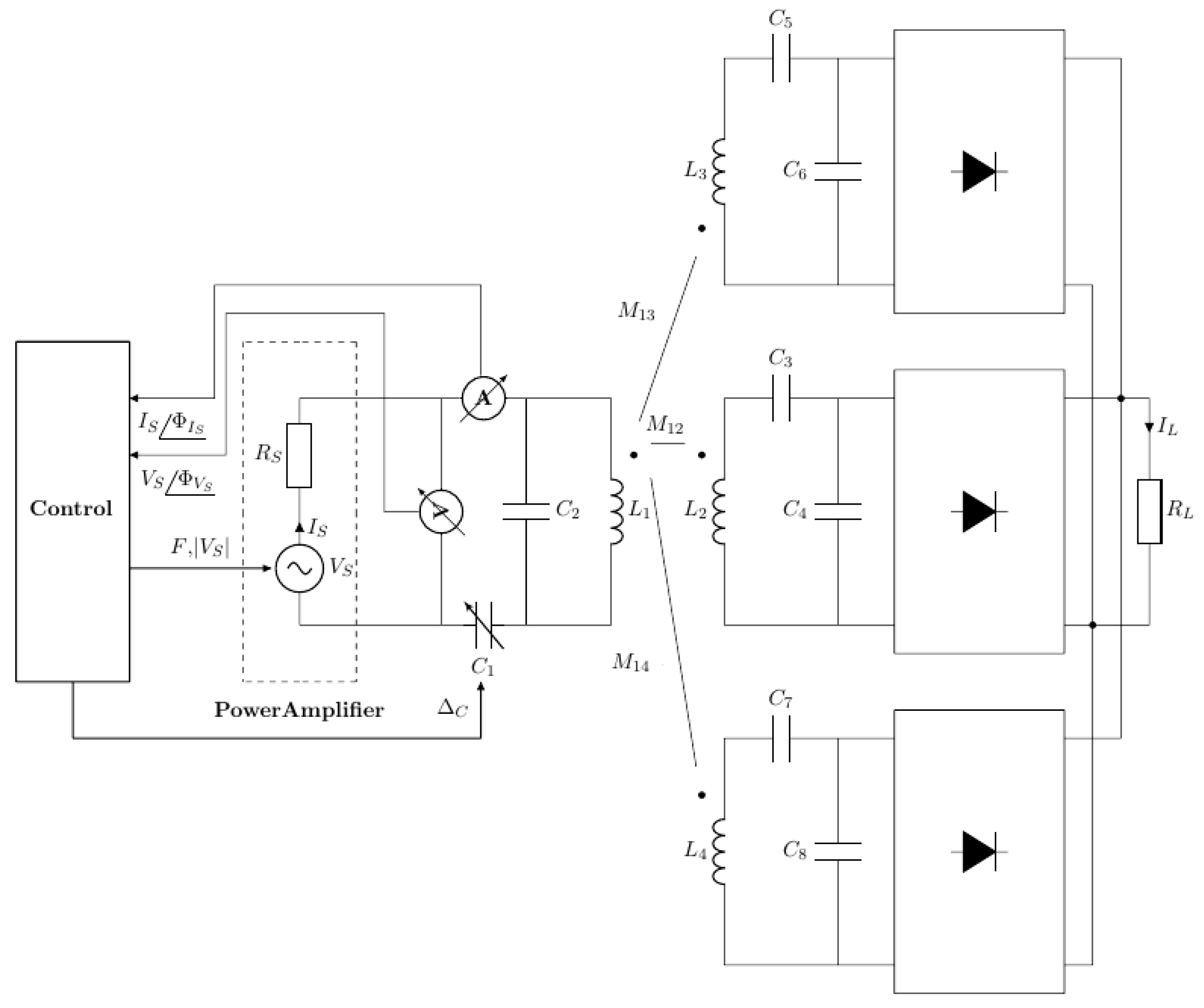
2. Multicoil Inductive Link
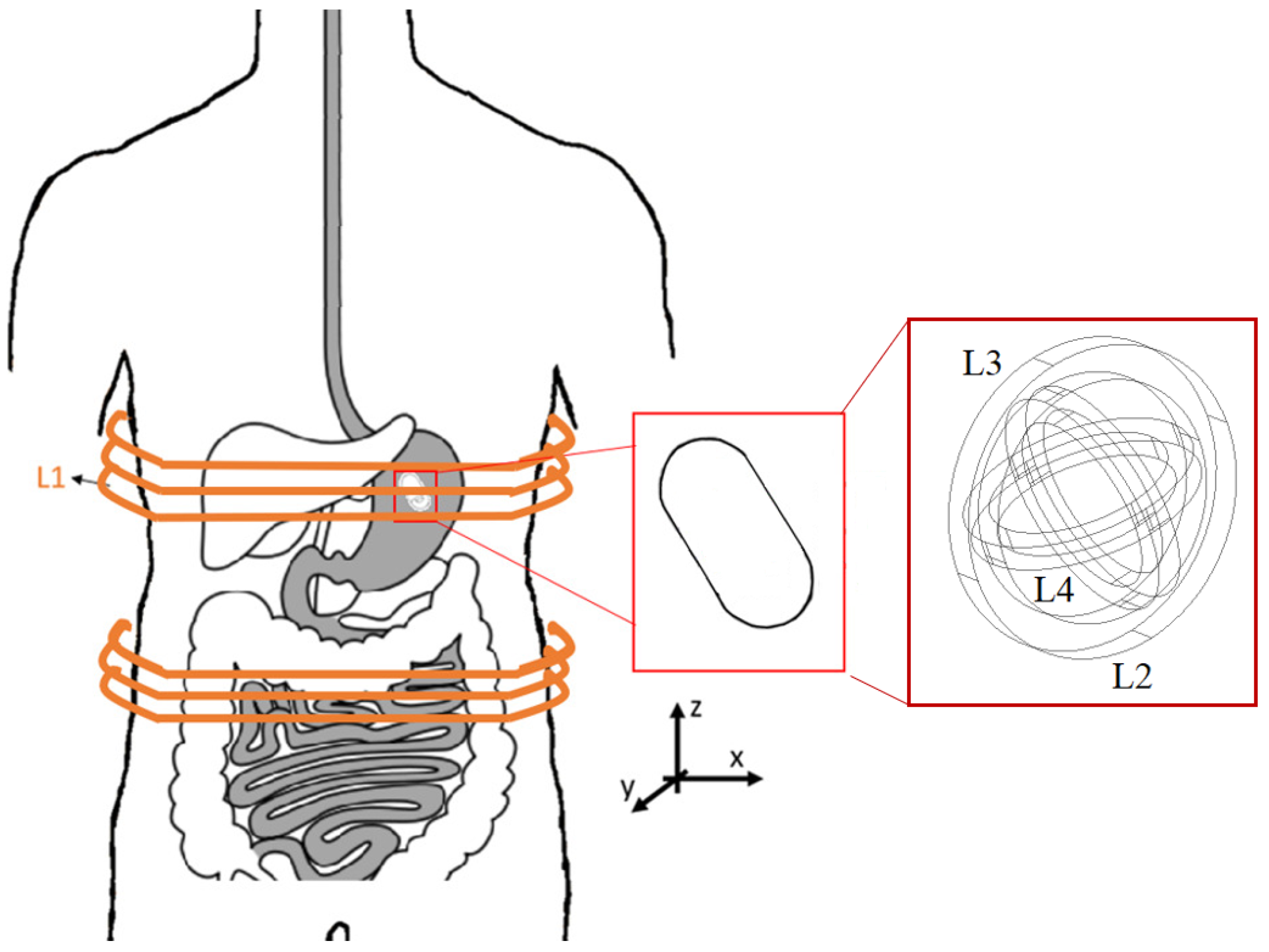
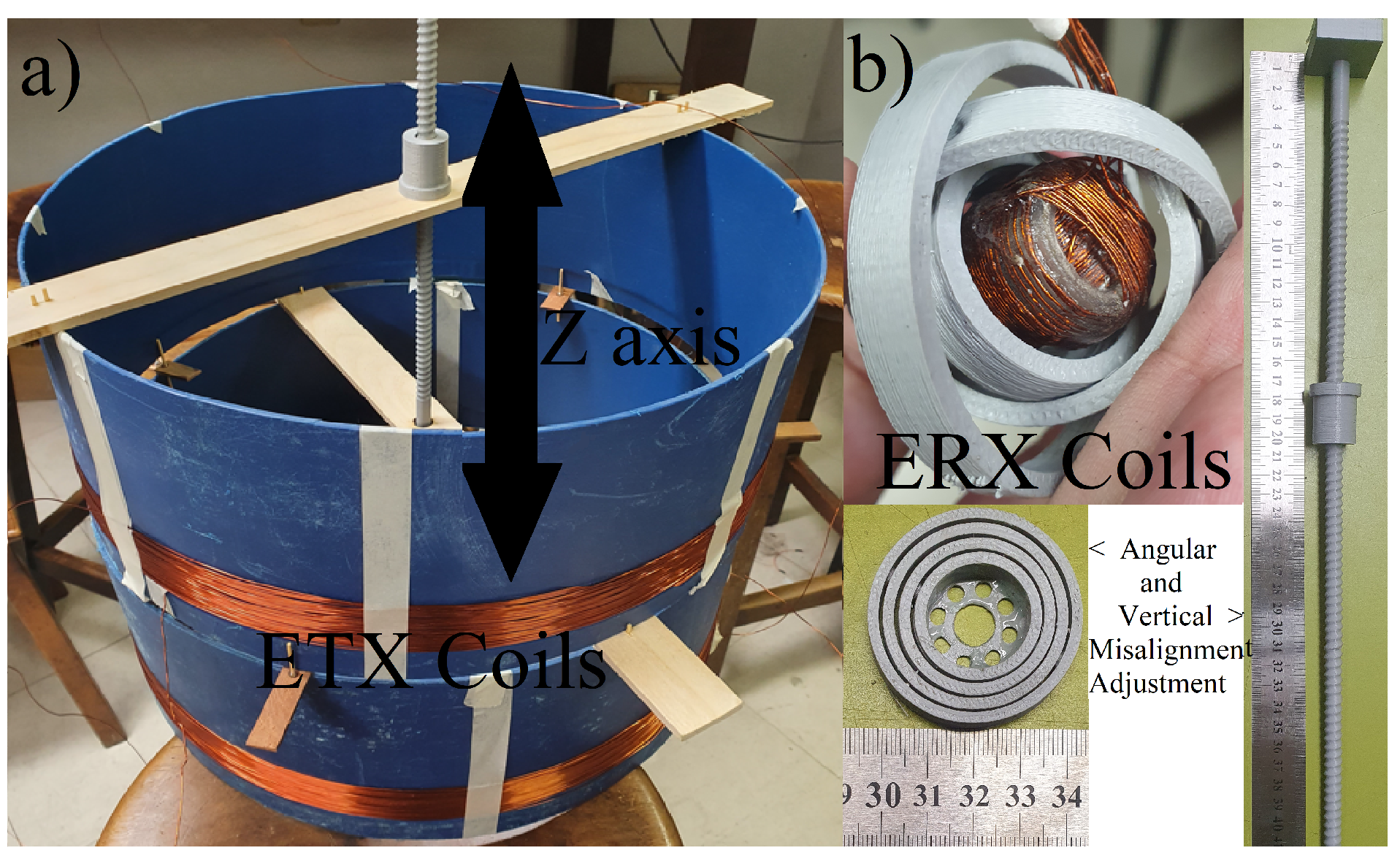
2.1. Design of the Inductive Link to the SWEC
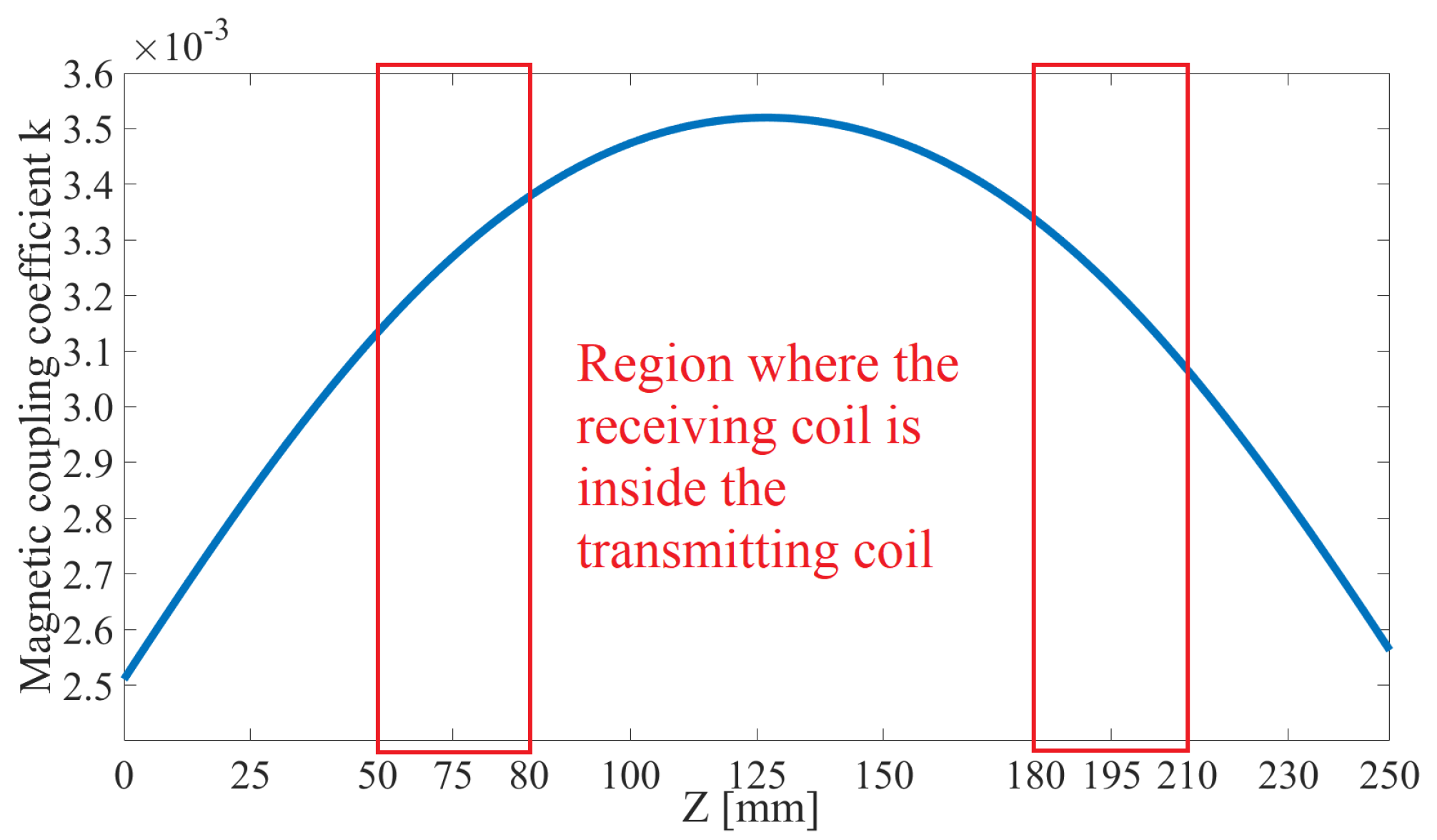
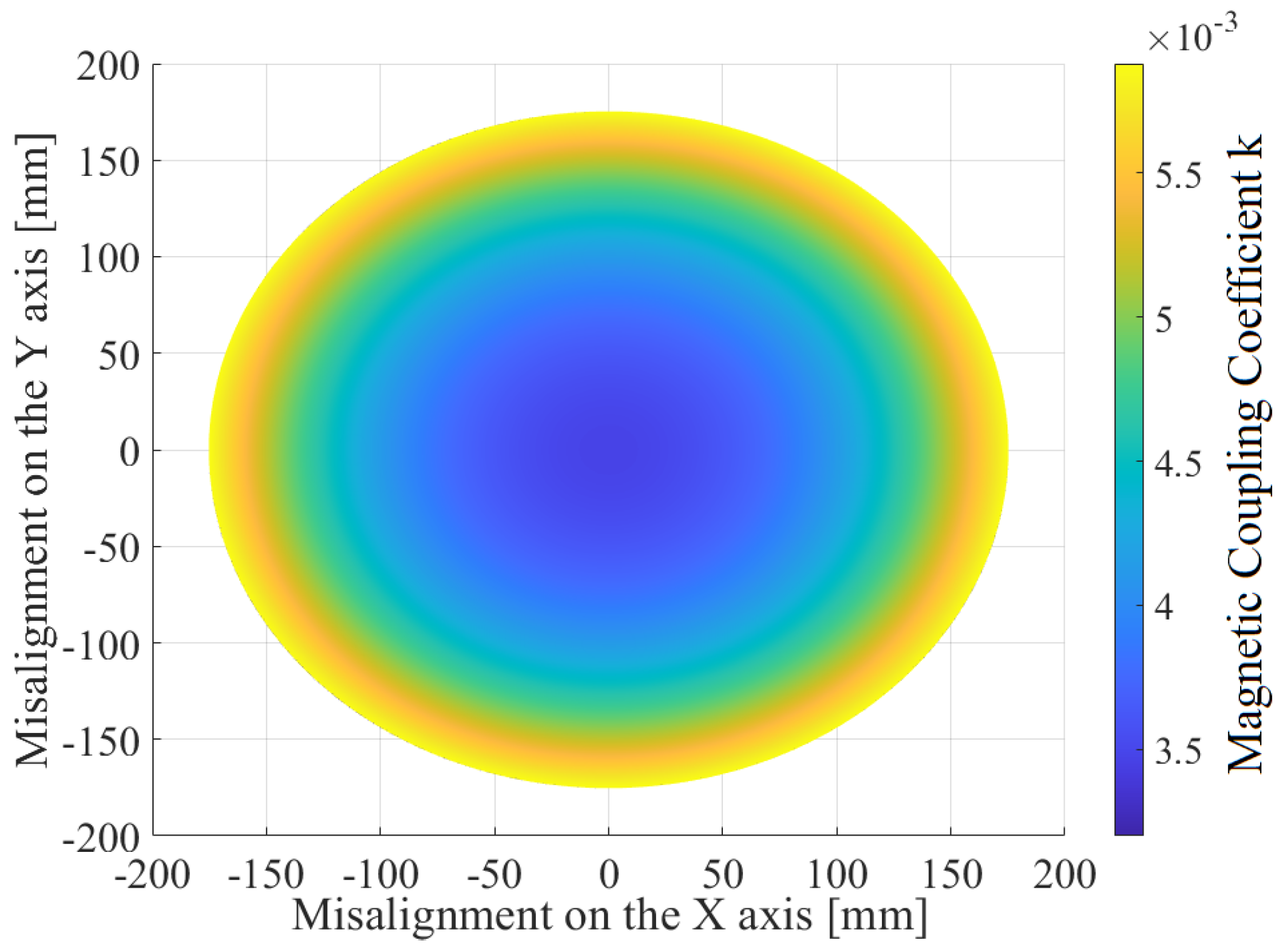
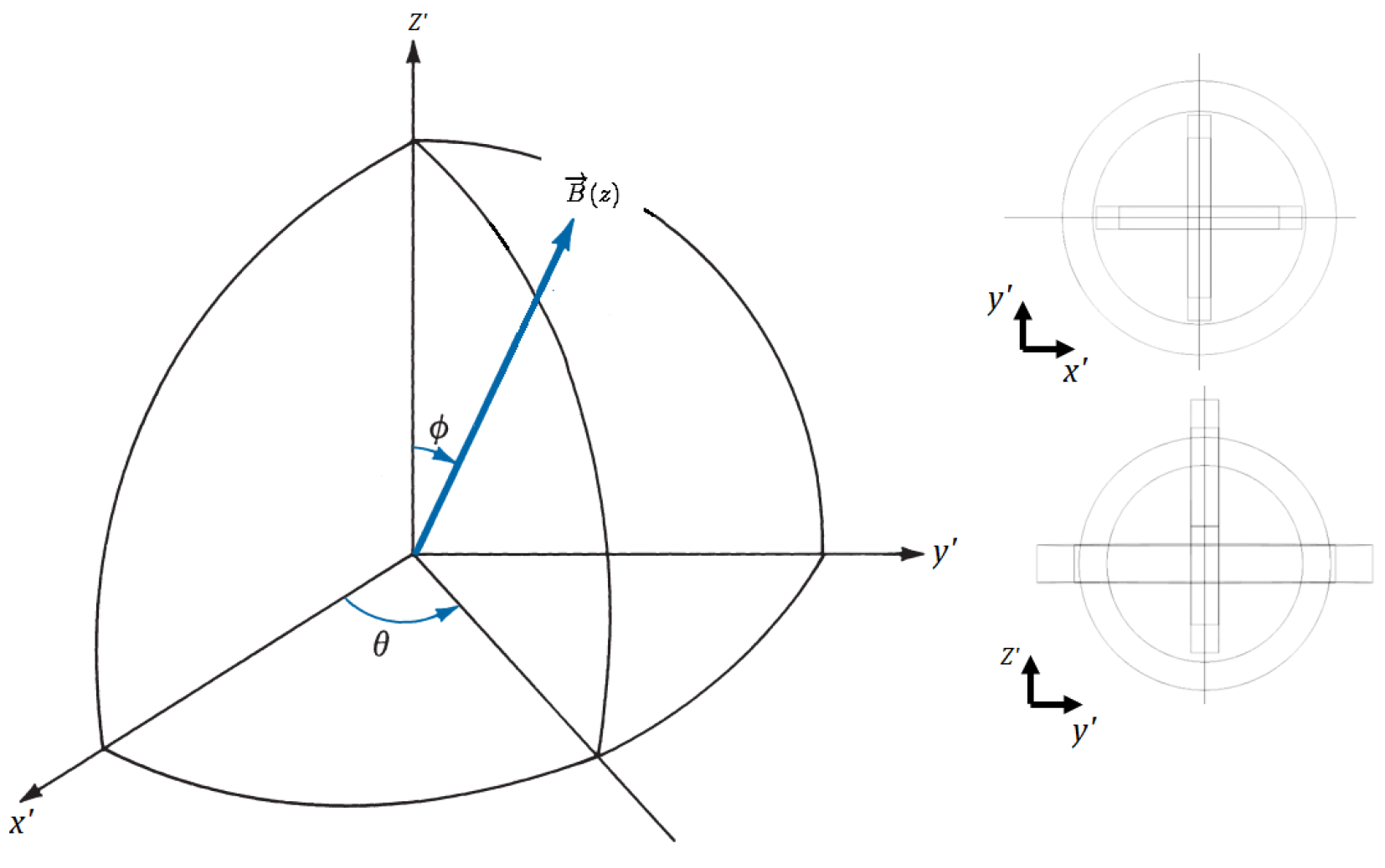
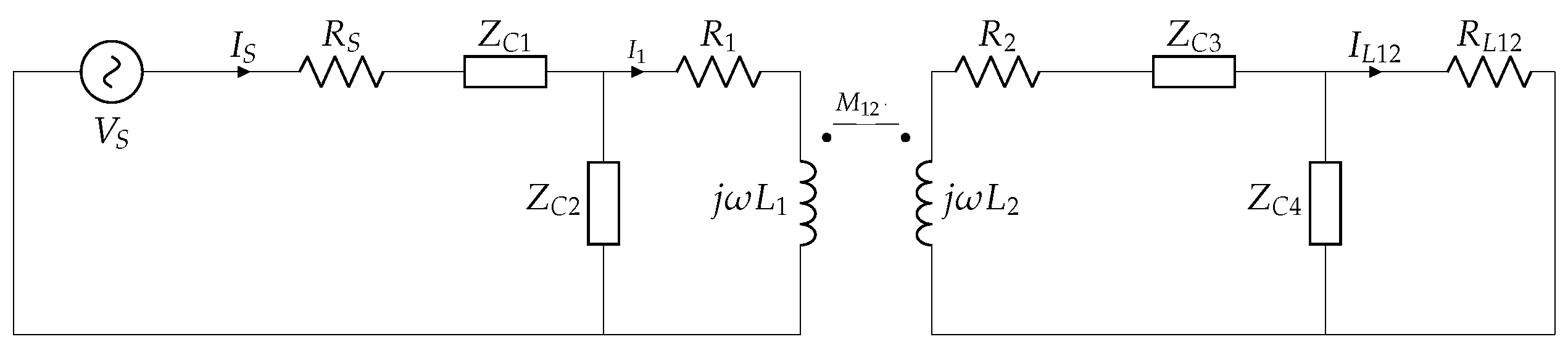
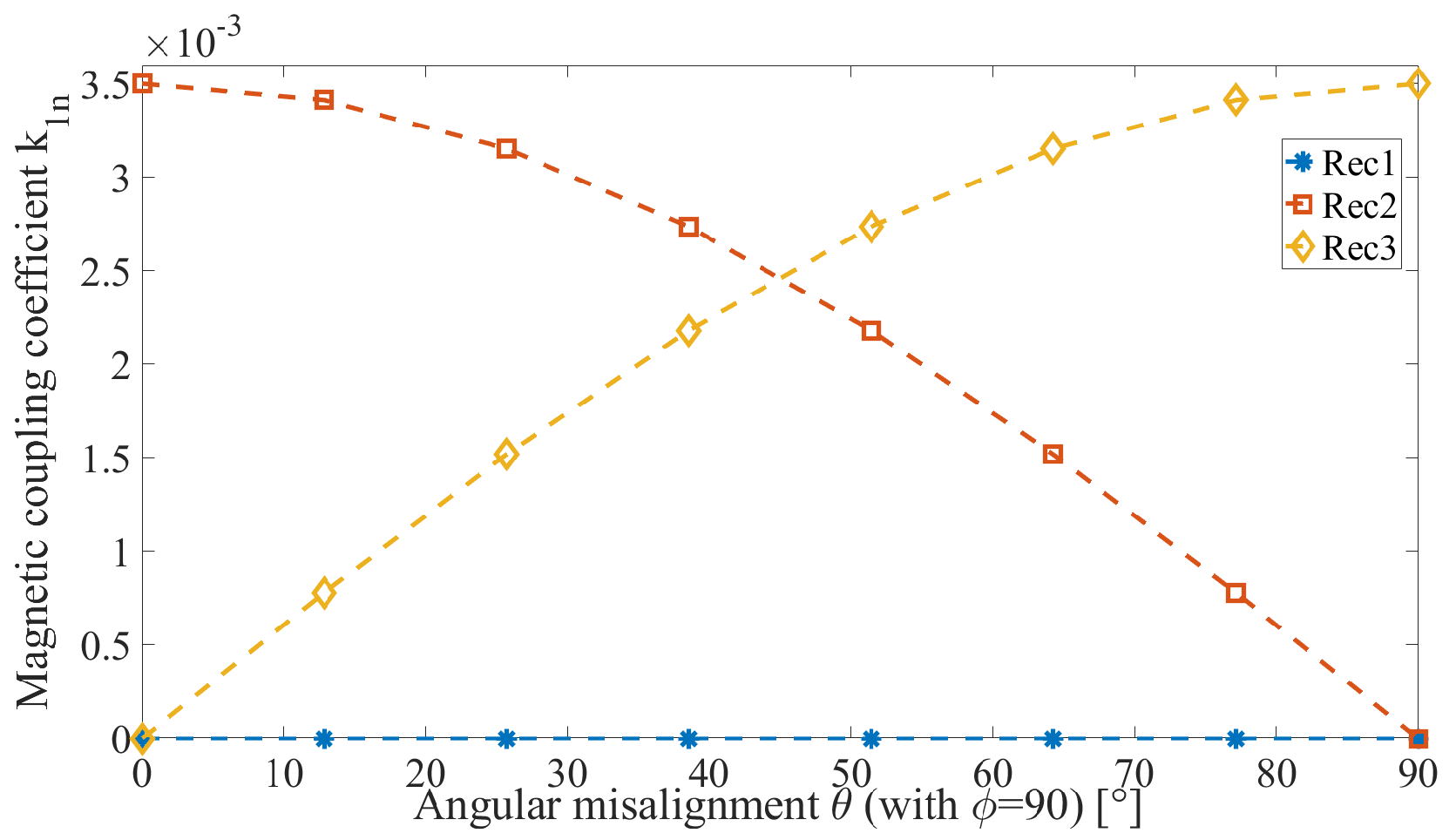
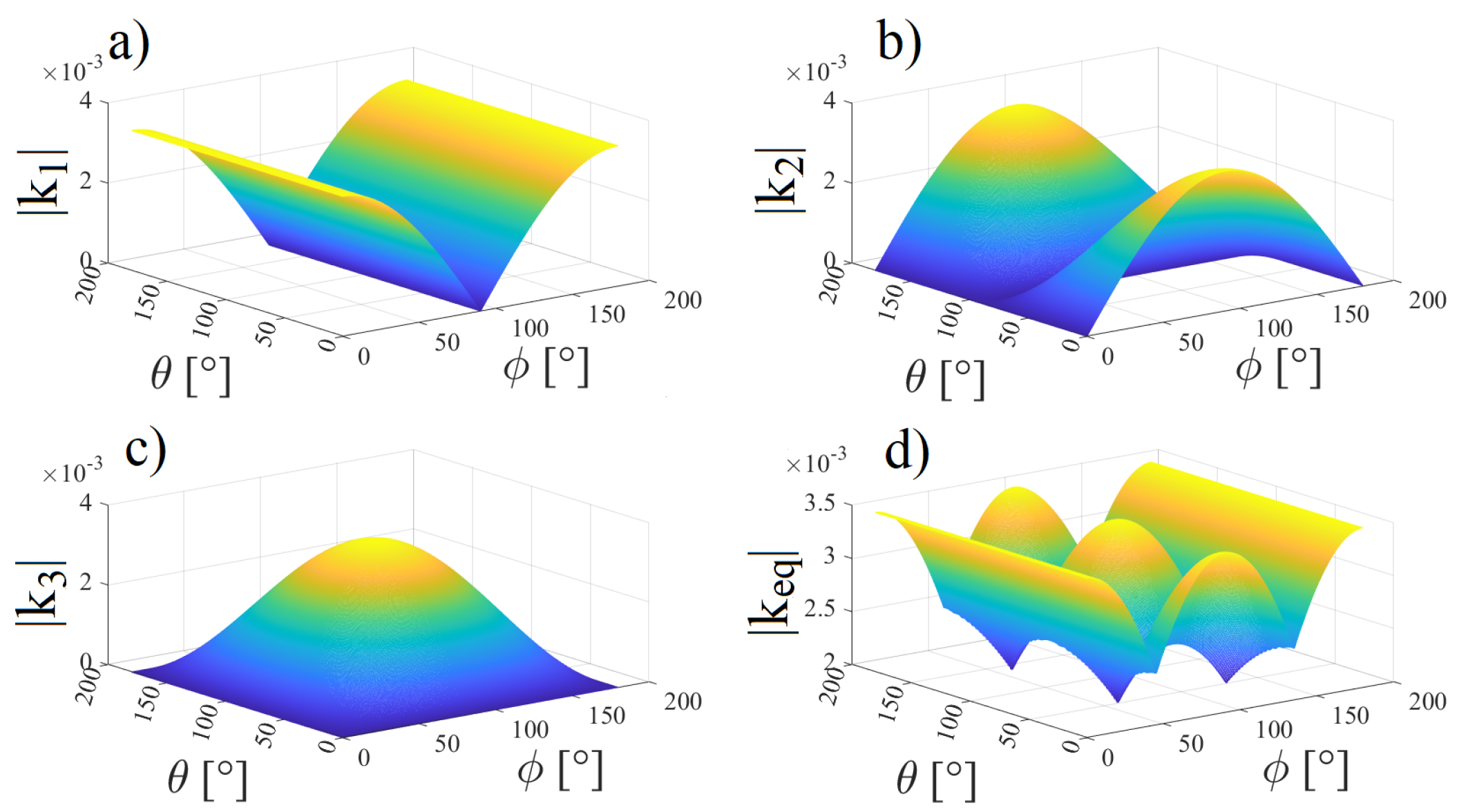
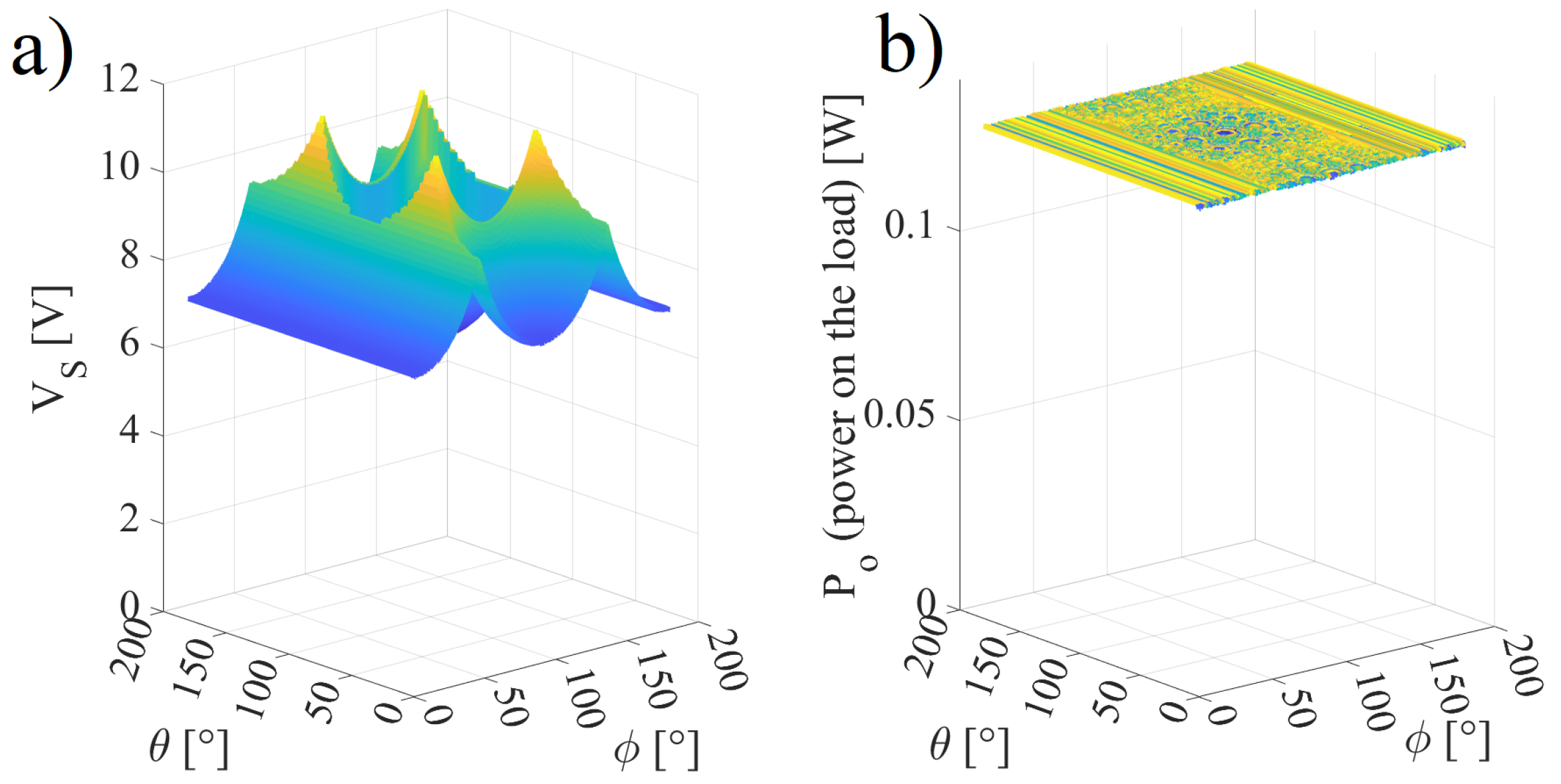
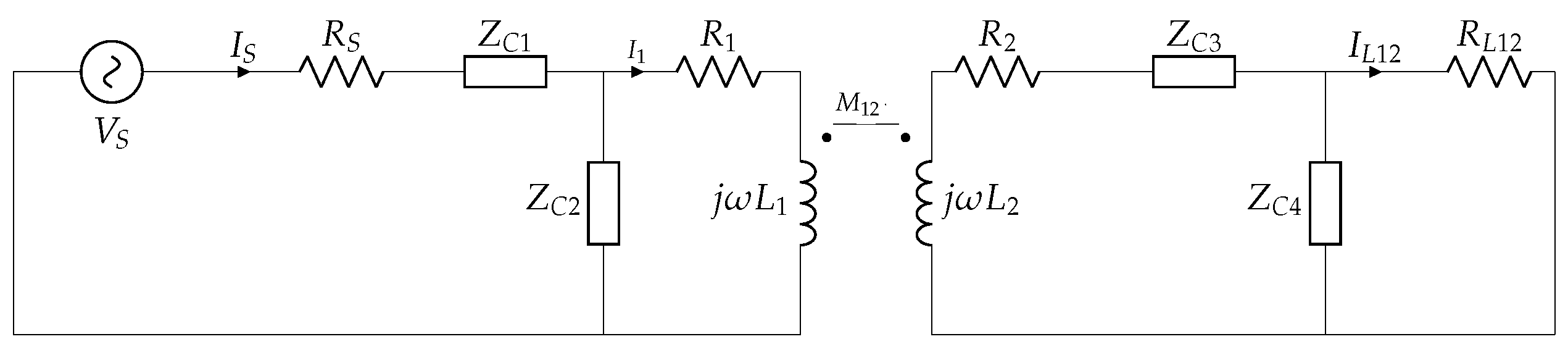
2.2. Power Transfer Analysis
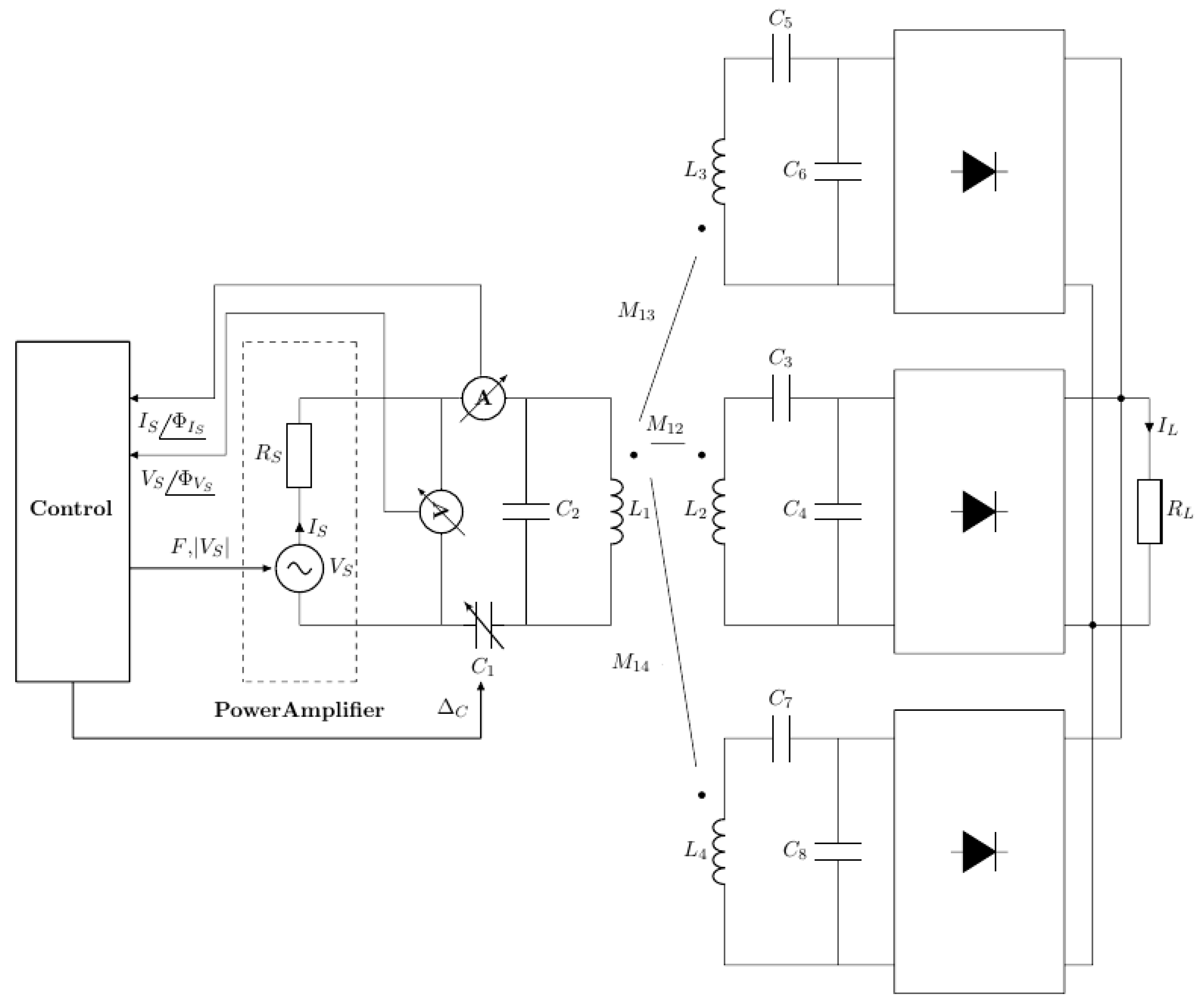
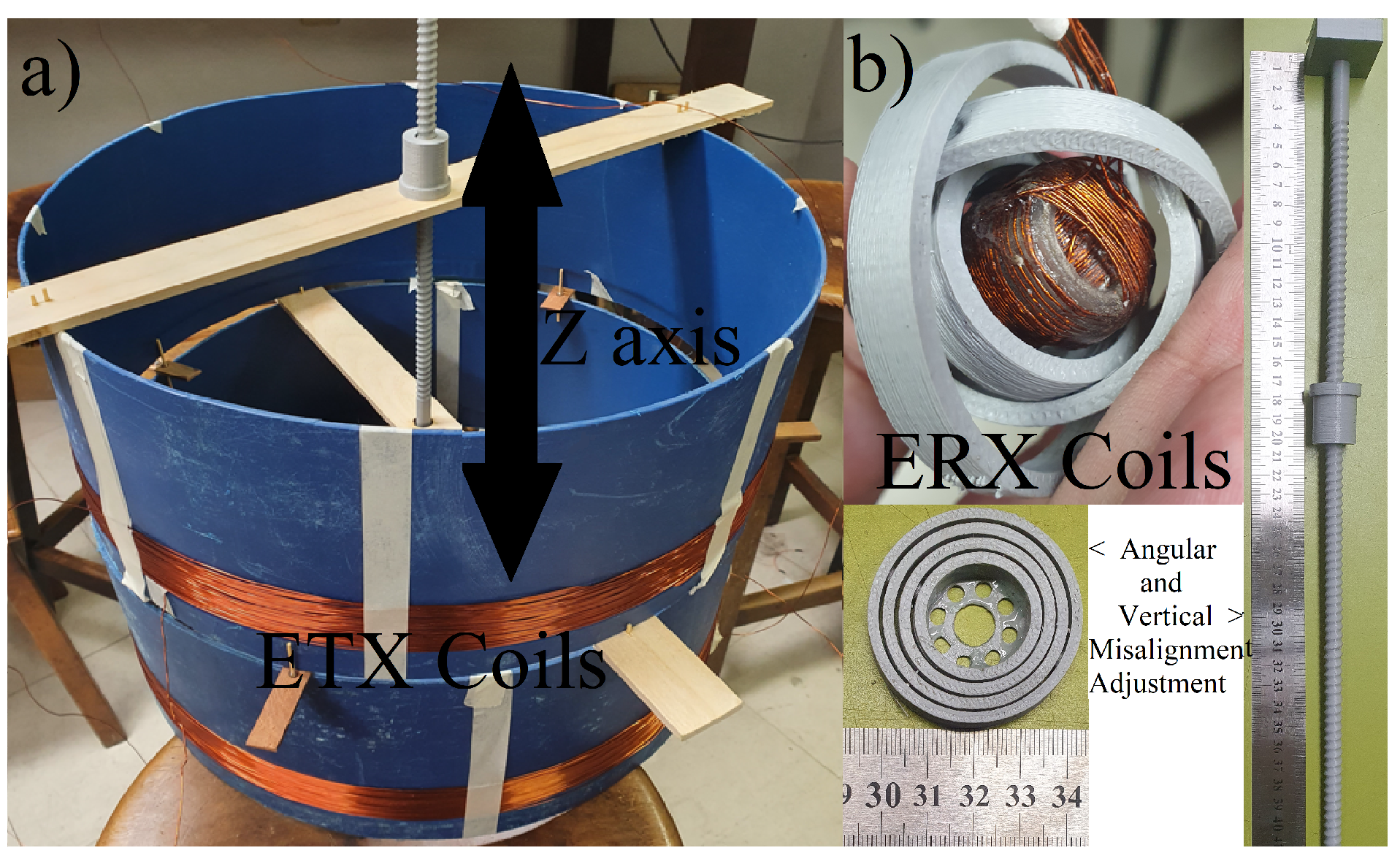
3. Methodology
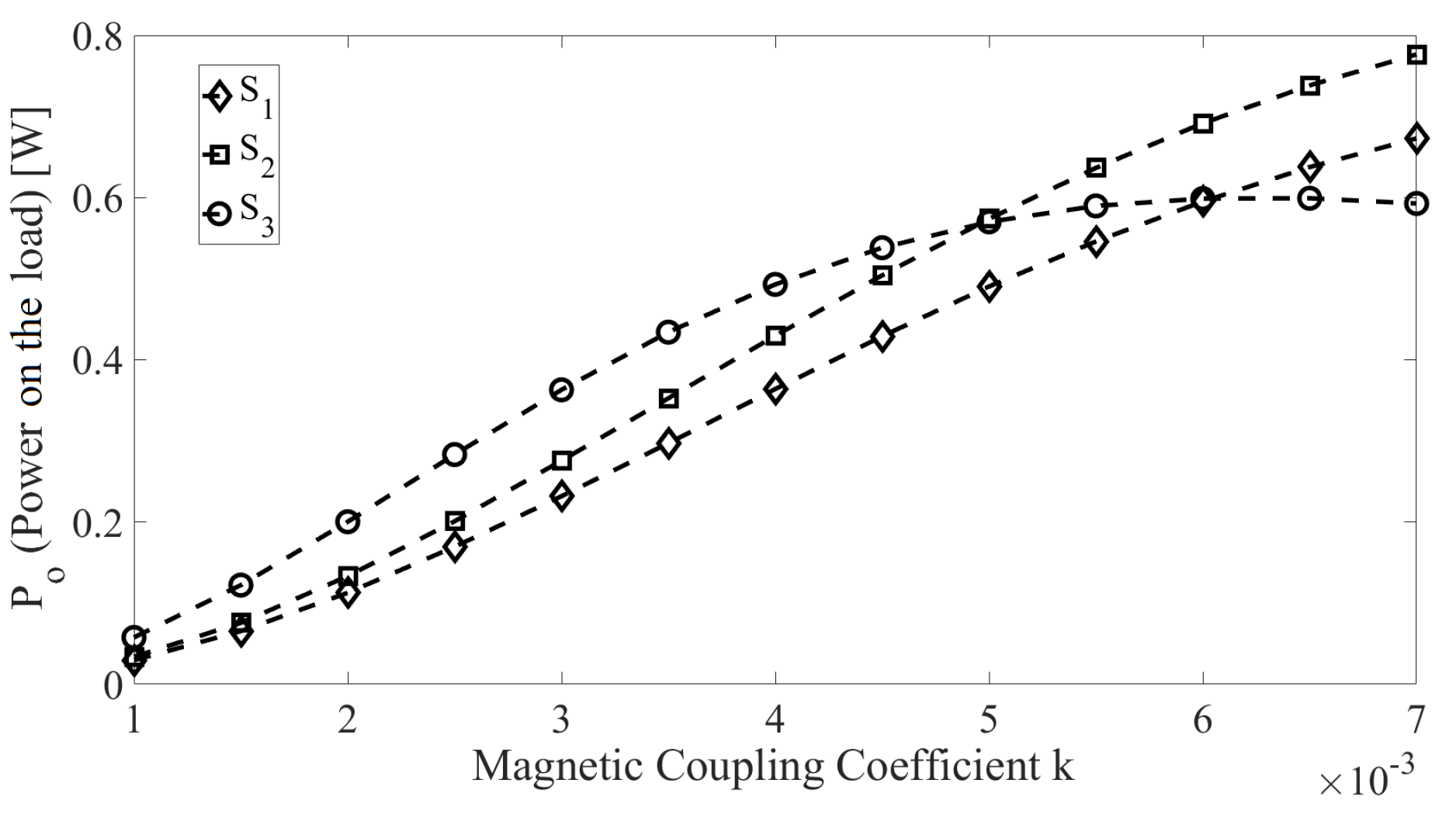
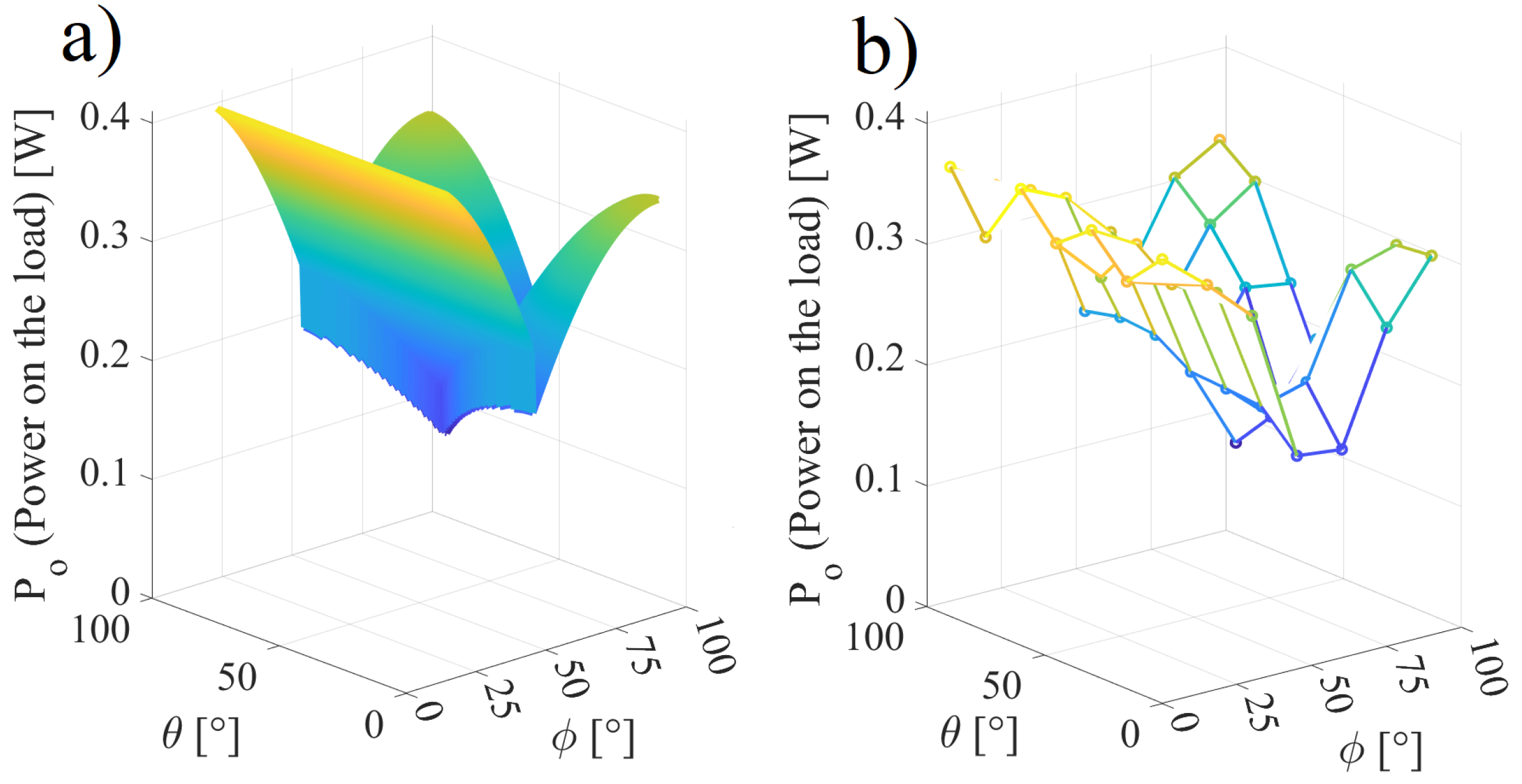
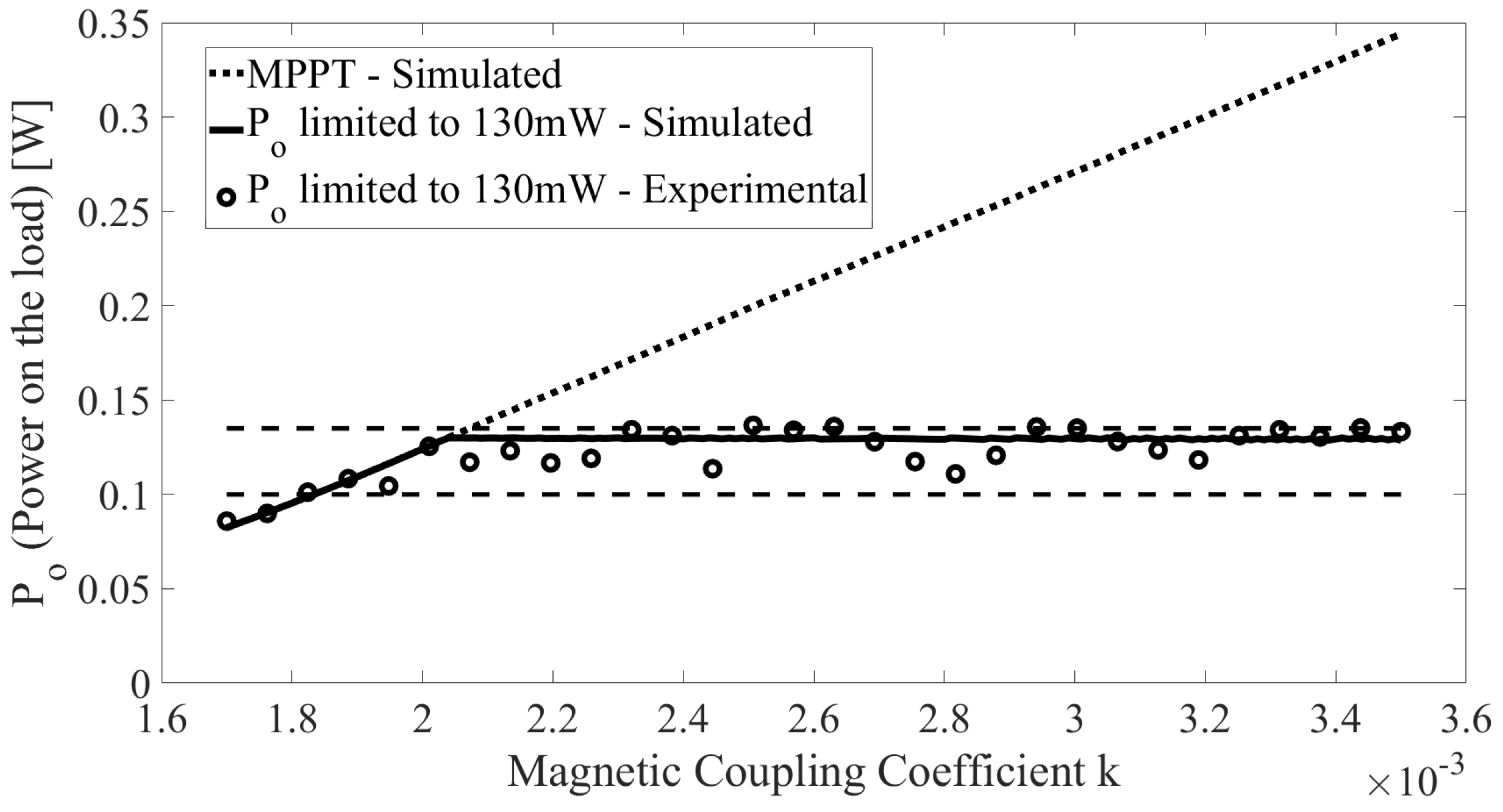
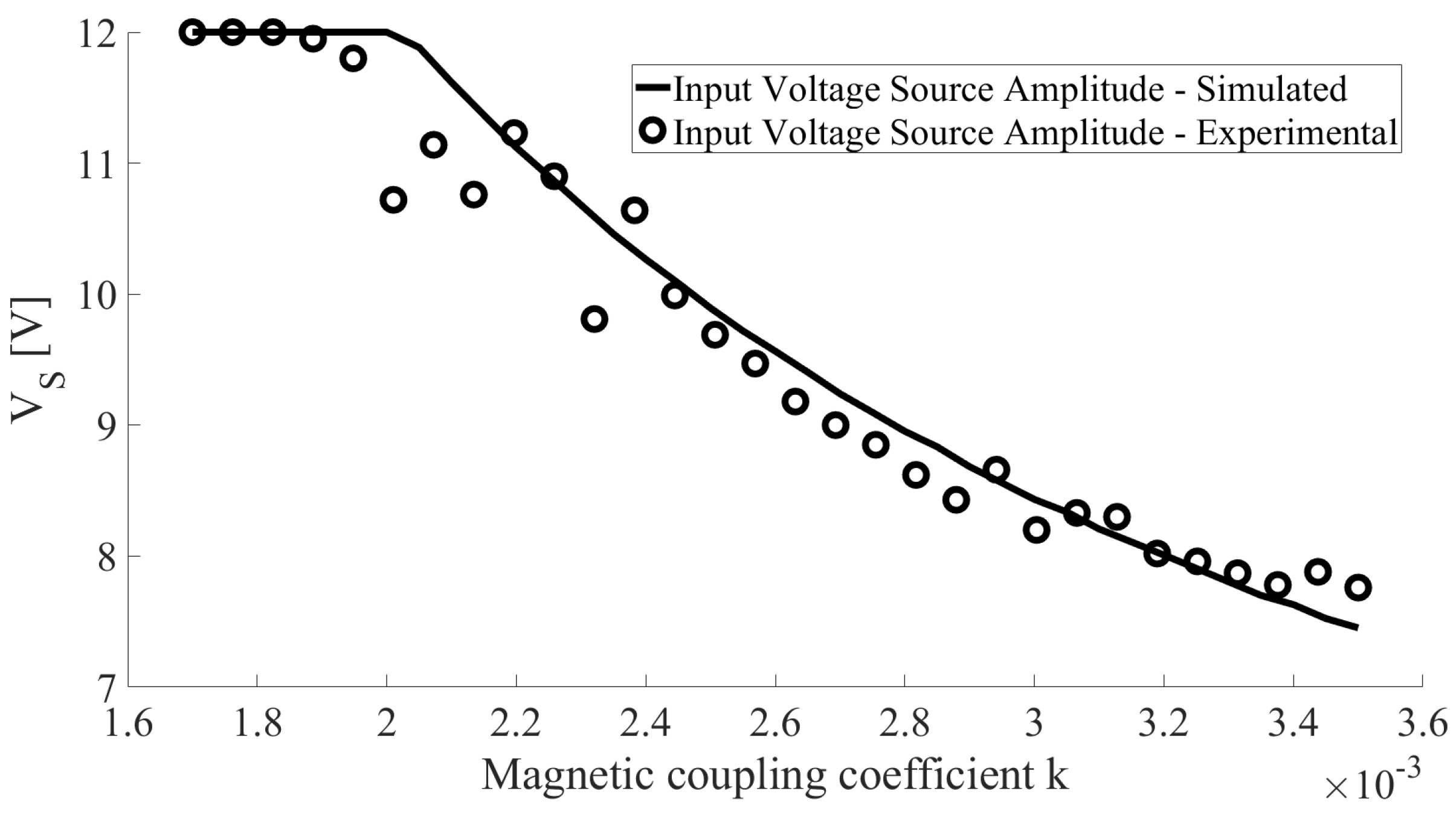
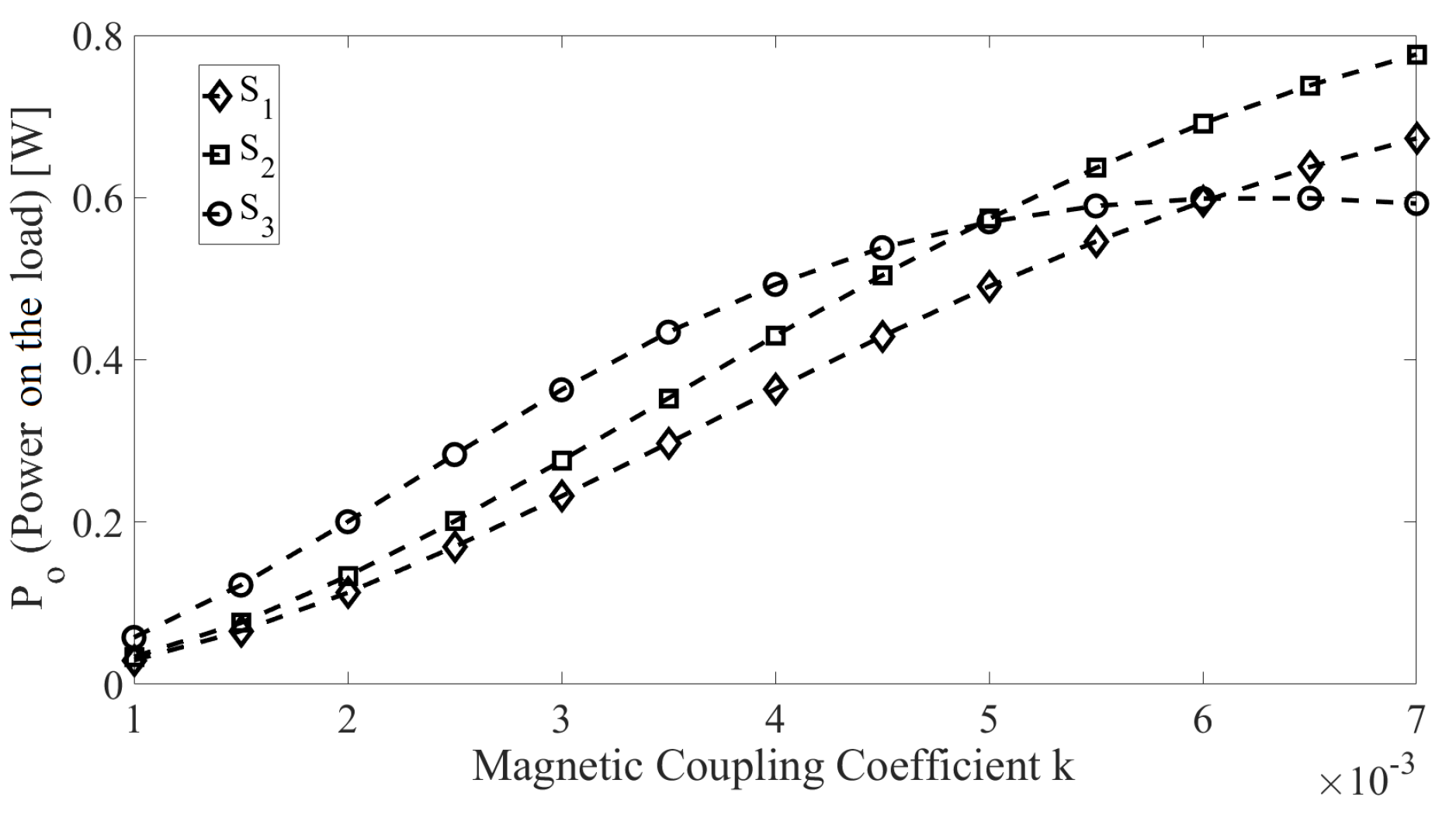
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Basar, M.R.; Ahmad, M.Y.; Cho, J.; Ibrahim, F. Application of Wireless Power Transmission Systems in Wireless Capsule Endoscopy: An Overview. Sensors 2014, 14, 10929–10951. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.H.; Nam, S.J. Capsule Endoscopy for Gastric Evaluation. Diagnostics 2021, 11, 1792. [Google Scholar] [CrossRef] [PubMed]
- Basar, M.R.; Ahmad, M.Y.; Cho, J.; Ibrahim, F. Stable and High-Efficiency Wireless Power Transfer System for Robotic Capsule Using a Modified Helmholtz Coil. IEEE Trans. Ind. Electron. 2017, 64, 1113–1122. [Google Scholar] [CrossRef]
- Khan, S.R.; Pavuluri, S.K.; Cummins, G.; Desmulliez, M.P.Y. Wireless Power Transfer Techniques for Implantable Medical Devices: A Review. Sensors 2020, 20, 3487. [Google Scholar] [CrossRef] [PubMed]
- Haerinia, M.; Shadid, R. Wireless Power Transfer Approaches for Medical Implants: A Review. Signals 2020, 1, 209–229. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; De Santis, V.; Maradei, F.; Feliziani, M. Near Field Wireless Powering of Deep Medical Implants. Energies 2019, 12, 2720. [Google Scholar] [CrossRef]
- Mayordomo, I.; Drager, T.; Alayon, J.A.; Bernhard, J. Wireless power transfer for sensors and systems embedded in fiber composites. In Proceedings of the Wireless Power Transfer (WPT), Perugia, Italy, 15–16 May 2013; pp. 107–110. [Google Scholar]
- Wu, R.; Li, W.; Luo, H.; Sin, J.K.O.; Yue, C.P. Design and Characterization of Wireless Power Links for Brain—Machine Interface Applications. IEEE Trans. Power Electron. 2014, 29, 5462–5471. [Google Scholar] [CrossRef]
- Hui, S.Y.R.; Zhong, W.; Lee, C.K. A critical review of recent progress in mid-range wireless power transfer. IEEE Trans. Power Electron. 2014, 29, 4500–4511. [Google Scholar] [CrossRef]
- Harrison, R. Designing efficient inductive power links for implantable devices. In Proceedings of the 2007 IEEE International Symposium on Circuits and Systems (ISCAS 2007), New Orleans, LA, USA, 27–30 May 2007; pp. 2080–2083. [Google Scholar] [CrossRef]
- Olivo, J.; Carrara, S.; Micheli, G.D. IronIC Patch: A Wearable Device for the Remote Powering and Connectivity of Implantable Systems. In Proceedings of the Instrumentation and Measurement Technology Conference (I2MTC), 2012 IEEE International, Graz, Austria, 13–16 May 2012; pp. 286–290. [Google Scholar]
- Li, P.; Bashirullah, R. A wireless power interface for rechargeable battery operated medical implants. IEEE Trans. Circuits Syst. II Exp. Briefs 2007, 54, 912–916. [Google Scholar] [CrossRef] [Green Version]
- Rush, A.; Troyk, P.R. Dual Inductive Link Coil Design for a Neural Recording System. In Proceedings of the 33rd Annual International Conference of the IEEE EMBS, Boston, MA, USA, 30 August–3 September 2011. [Google Scholar]
- Waffenschmidt, E.; Staring, T. Limitation of inductive power transfer for consumer applications. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 28–10 September 2009; pp. 1–10. [Google Scholar]
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and Optimization of Circular Magnetic Structures for Lumped Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2011, 26, 3096–3108. [Google Scholar] [CrossRef]
- Pinuela, M.; Yates, D.C.; Lucyszyn, S.; Mitcheson, P.D. Maximizing DC-to-Load Efficiency for Inductive Power Transfer. IEEE Trans. Power Electron. 2013, 28, 2437–2447. [Google Scholar] [CrossRef]
- Wang, C.; Stielau, O.H.; Covic, G.A. Design Considerations for a Contactless Electric Vehicle Battery Charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- Huh, J.; Lee, S.W.; Lee, W.Y.; Cho, G.H.; Rim, C.T. Narrow-Width Inductive Power Transfer System for Online Electrical Vehicles. IEEE Trans. Power Electron. 2011, 26, 3666–3679. [Google Scholar] [CrossRef]
- Shin, S.; Shin, J.; Song, B.; Lee, S.; Kim, Y.; Jung, G.; Jeon, S. Wireless Power Transfer System for High Power Application and a Method of Segmentation. In Proceedings of the Wireless Power Transfer (WPT), Perugia, Italy, 15–16 May 2013; pp. 76–78. [Google Scholar]
- Pantic, Z.; Lukic, S.M. Framework and Topology for Active Tuning of Parallel Compensated Receivers in Power Transfer Systems. IEEE Trans. Power Electron. 2012, 27, 4503–4513. [Google Scholar] [CrossRef]
- Brusamarello, V.; Blauth, Y.B.; de Azambuja, R.; Muller, I.; de Sousa, F.R. Power Transfer With an Inductive Link and Wireless Tuning. IEEE Trans. Instrum. Meas. 2013, 62, 924–931. [Google Scholar] [CrossRef]
- Lim, Y.; Tang, H.; Lim, S.; Park, J. An Adaptive Impedance-Matching Network Based on a Novel Capacitor Matrix for Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 4403–4413. [Google Scholar] [CrossRef]
- Aldhaher, S.; Luk, P.; Whidborne, J.F. Tuning Class E Inverters Applied in Inductive Links Using Saturable Reactors. IEEE Trans. Power Electron. 2014, 29, 2969–2978. [Google Scholar] [CrossRef]
- Murliky, L.; Porto, R.W.; Brusamarello, V.J.; Rangel de Sousa, F.; Triviño-Cabrera, A. Active Tuning of Wireless Power Transfer System for compensating coil misalignment and variable load conditions. AEU—Int. J. Electron. Commun. 2020, 119, 153166. [Google Scholar] [CrossRef]
- Lee, M.; Lee, C.; Park, C. Transceiver for Wireless Power Transfer Using a Cross-Coupled Oscillator for a Wireless On-Wafer Test. IEEE Trans. Instrum. Meas. 2017, 66, 2097–2105. [Google Scholar] [CrossRef]
- Zhou, X.; Ma, H.; Gu, J.; Chen, H.; Deng, W. Parameter adaptation-based ant colony optimization with dynamic hybrid mechanism. Eng. Appl. Artif. Intell. 2022, 114, 105139. [Google Scholar] [CrossRef]
- Chen, H.; Miao, F.; Chen, Y.; Xiong, Y.; Chen, T. A Hyperspectral Image Classification Method Using Multifeature Vectors and Optimized KELM. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 2781–2795. [Google Scholar] [CrossRef]
- Wu, D.; Wu, C. Research on the Time-Dependent Split Delivery Green Vehicle Routing Problem for Fresh Agricultural Products with Multiple Time Windows. Agriculture 2022, 12, 793. [Google Scholar] [CrossRef]
- An, Z.; Wang, X.; Li, B.; Xiang, Z.; Zhang, B. Robust visual tracking for UAVs with dynamic feature weight selection. Appl. Intell. 2022. [Google Scholar] [CrossRef]
- Murliky, L.; Oliveira, G.; Gosmann, G.; Brusamarello, V.J.; de Sousa, F.R. Study of a Wireless Energy Transmission System for an Endoscopy Capsule with Dynamic Tuning. In Proceedings of the 2021 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Glasgow, UK, 17–20 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Khan, S.R.; Desmulliez, M. Towards a Miniaturized 3D Receiver WPT System for Capsule Endoscopy. Micromachines 2019, 8, 545. [Google Scholar] [CrossRef]
- Kang, T.; Kim, S.; Oh, K.I.; Hwang, J.H.; Lee, J.; Park, H.; Byun, K.; Lee, W. Evaluation of Human Body Characteristics for Electric Signal Transmission Based on Measured Body Impulse Response. IEEE Trans. Instrum. Meas. 2020, 69, 6399–6411. [Google Scholar] [CrossRef]
- Sun, T.; Xie, X.; Li, G.; Gu, Y.; Deng, Y.; Wang, Z. A Two-Hop Wireless Power Transfer System With an Efficiency-Enhanced Power Receiver for Motion-Free Capsule Endoscopy Inspection. IEEE Trans. Biomed. Eng. 2012, 59, 3247–3254. [Google Scholar]
- Wen, F.; Chu, X.; Li, Q.; Jing, F.; Zhao, W.; Chu, Z. Receiver Localization and Power Stabilization for Wireless Power Transfer System. In Proceedings of the 2020 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 16–18 October 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Sravya, D.; Bobba, P.B.; Rani, M.N.S. Investigation of Wireless Power Transfer System with Different Coil Structures used in Wireless Capsule Endoscope. In Proceedings of the 2021 International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Hyderabad, India, 21–23 January 2021; pp. 1–6. [Google Scholar] [CrossRef]
- de Azambuja, R.; Brusamarello, V.J.; Haffner, S.; Porto, R.W. Analysis and optimization of an inductive power transfer with a randomized method. IEEE Trans. Instrum. Meas 2014, 63, 1145–1152. [Google Scholar] [CrossRef]
- Koran, A.; Badran, K. Adaptive Frequency Control of a Sensorless-Receiver Inductive Wireless Power Transfer System Based on Mixed-Compensation Topology. IEEE Trans. Power Electron. 2021, 36, 978–990. [Google Scholar] [CrossRef]
- Li, H.; Li, G.; Xie, X.; Huang, Y.; Wang, Z. Omnidirectional wireless power combination harvest for wireless endoscopy. In Proceedings of the 2014 IEEE Biomedical Circuits and Systems Conference (BioCAS) Proceedings, Lausanne, Switzerland, 22–24 October 2014; pp. 420–423. [Google Scholar] [CrossRef]
- Basar, M.R.; Ahmad, M.Y.; Cho, J.; Ibrahim, F. An Improved Wearable Resonant Wireless Power Transfer System for Biomedical Capsule Endoscope. IEEE Trans. Ind. Electron. 2018, 65, 7772–7781. [Google Scholar] [CrossRef]
- Porto, R.W.; Brusamarello, V.J.; Pereira, L.A.; Sousa, F.R. Fine Tuning of an Inductive Link Through a Voltage-Controlled Capacitance. IEEE Trans. Power Electronics 2017, 32, 4115–4124. [Google Scholar] [CrossRef]
- Evaluation of Measurement Data—Supplement 1 to the “Guide to the Expression of Uncertainty in Measurement”—Propagation of Distributions Using a Monte Carlo Method; Technical Report, JCGM 101; JCGM: Paris, France, 2008.
- He, S.; Yan, G.Z.; Ke, Q.; Wang, Z.W.; Chen, W.W. A wirelessly powered expanding-extending robotic capsule endoscope for human intestine. Int. J. Precis. Eng. Manuf. 2015, 16, 1075–1084. [Google Scholar] [CrossRef]
- Basar, M.R.; Ahmad, M.Y.; Cho, J.; Ibrahim, F. A 3-coil wireless power transfer system with fine tuned power amplifier for biomedical capsule. In Proceedings of the 2017 IEEE Asia Pacific Microwave Conference (APMC), Kuala Lumpar, Malaysia, 13–16 November 2017; pp. 142–145. [Google Scholar] [CrossRef]
- Na, K.; Jang, H.; Ma, H.; Bien, F. Tracking Optimal Efficiency of Magnetic Resonance Wireless Power Transfer System for Biomedical Capsule Endoscopy. IEEE Trans. Microw. Theory Tech. 2015, 63, 295–304. [Google Scholar] [CrossRef]
- Khan, S.R.; Pavuluri, S.K.; Cummins, G.; Desmulliez, M.P.Y. Miniaturized 3-D Cross-Type Receiver for Wirelessly Powered Capsule Endoscopy. IEEE Trans. Microw. Theory Tech. 2019, 67, 1985–1993. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Output | Dynamic Tuning Method |
|---|---|---|
| [31] | Frequency scanning | |
| [3] | Capacitor switching network | |
| [33] | Multiple frequency transmitter | |
| [34] | No dynamic tuning | |
| This work | Frequency scanning and capacitor switching network |
| Symbol | Parameter | Value | |
|---|---|---|---|
| f | Frequency | 805 k | |
| Internal Resist. of | 700 m | 7 | |
| Magnitude of | |||
| ETX DC Resistance | |||
| ERX DC Resistance | 572 m | 6 | |
| ERX DC Resistance | 588 m | 6 | |
| ERX DC Resistance | 603 m | 6 | |
| Capacitance | |||
| Capacitance | |||
| Capacitance | |||
| Capacitance | |||
| Capacitance | |||
| ETX Inductance | m | ||
| ERX Inductance | |||
| ERX Inductance | |||
| ERX Inductance | |||
| Load Impedance |
| Simulated | Experimental | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Freq. [kHz] | [pF] | [mW] | [%] | Freq. [kHz] | [pF] | [W] | ||||
| 0 | 0 | |||||||||
| 15 | 15 | |||||||||
| 30 | 30 | |||||||||
| 45 | 45 | |||||||||
| 60 | 60 | |||||||||
| 75 | 75 | |||||||||
| 90 | 90 | |||||||||
| Simulated | Experimental | ||||
|---|---|---|---|---|---|
| [mW] | [W] | ||||
| 0 | 0 | 7.28 | 128.7 | 7.8 | |
| 15 | 15 | 7.49 | 129.6 | 7.9 | |
| 30 | 30 | 8.14 | 129.6 | 8.0 | |
| 45 | 45 | 9.61 | 129.5 | 10.0 | |
| 60 | 60 | 8.17 | 129.6 | 9.5 | |
| 75 | 75 | 6.95 | 129.8 | 8.0 | |
| 90 | 90 | 6.59 | 128.9 | 7.5 | |
| Ref. | Freq. [kHz] | TX/RX [mm] | d [mm] | P [mW] | [%] |
|---|---|---|---|---|---|
| [33] | 1356 | 480/11 | − | 24 | 3.04 |
| [42] | 218 | 500/14 | − | 600 | 2 |
| [3] | 246 | 400/11 | 150 | 534 | 4.93 |
| [44] | 16,470 | 220/9 | − | 26 | 0.02 |
| [43] | 250 | 350/11.5 | 70 | 758 | 8.21 |
| [35] | 246 | 360/12.7 | 130 | 238.52 | 3.26 |
| [31] | 1000 | 202/8.9 | 100 | 70 | 1 |
| TW | 802–808 | 380/10 | 100 | 367.8 | 9.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murliky, L.; Oliveira, G.; de Sousa, F.R.; Brusamarello, V.J. Tracking and Dynamic Tuning of a Wireless Powered Endoscopic Capsule. Sensors 2022, 22, 6924. https://doi.org/10.3390/s22186924
Murliky L, Oliveira G, de Sousa FR, Brusamarello VJ. Tracking and Dynamic Tuning of a Wireless Powered Endoscopic Capsule. Sensors. 2022; 22(18):6924. https://doi.org/10.3390/s22186924
Chicago/Turabian StyleMurliky, Lucas, Gustavo Oliveira, Fernando Rangel de Sousa, and Valner João Brusamarello. 2022. "Tracking and Dynamic Tuning of a Wireless Powered Endoscopic Capsule" Sensors 22, no. 18: 6924. https://doi.org/10.3390/s22186924
APA StyleMurliky, L., Oliveira, G., de Sousa, F. R., & Brusamarello, V. J. (2022). Tracking and Dynamic Tuning of a Wireless Powered Endoscopic Capsule. Sensors, 22(18), 6924. https://doi.org/10.3390/s22186924