
Dynamics Simulation and Field Test Verification of Multi-Functional Beekeeping Loading Box Based on the Tracked Vehicle


Abstract
:1. Introduction
- (1)
- Perform modeling and dynamics analysis of actual vehicles in RecurDyn.
- (2)
- Conduct field transportation tests of beekeeping transporters inside apiaries to determine their safety.
- (3)
- Compare the results of dynamics analysis with those of the field test to verify the correctness of the dynamics analysis test and feasibility of field operation.
2. Materials and Methods
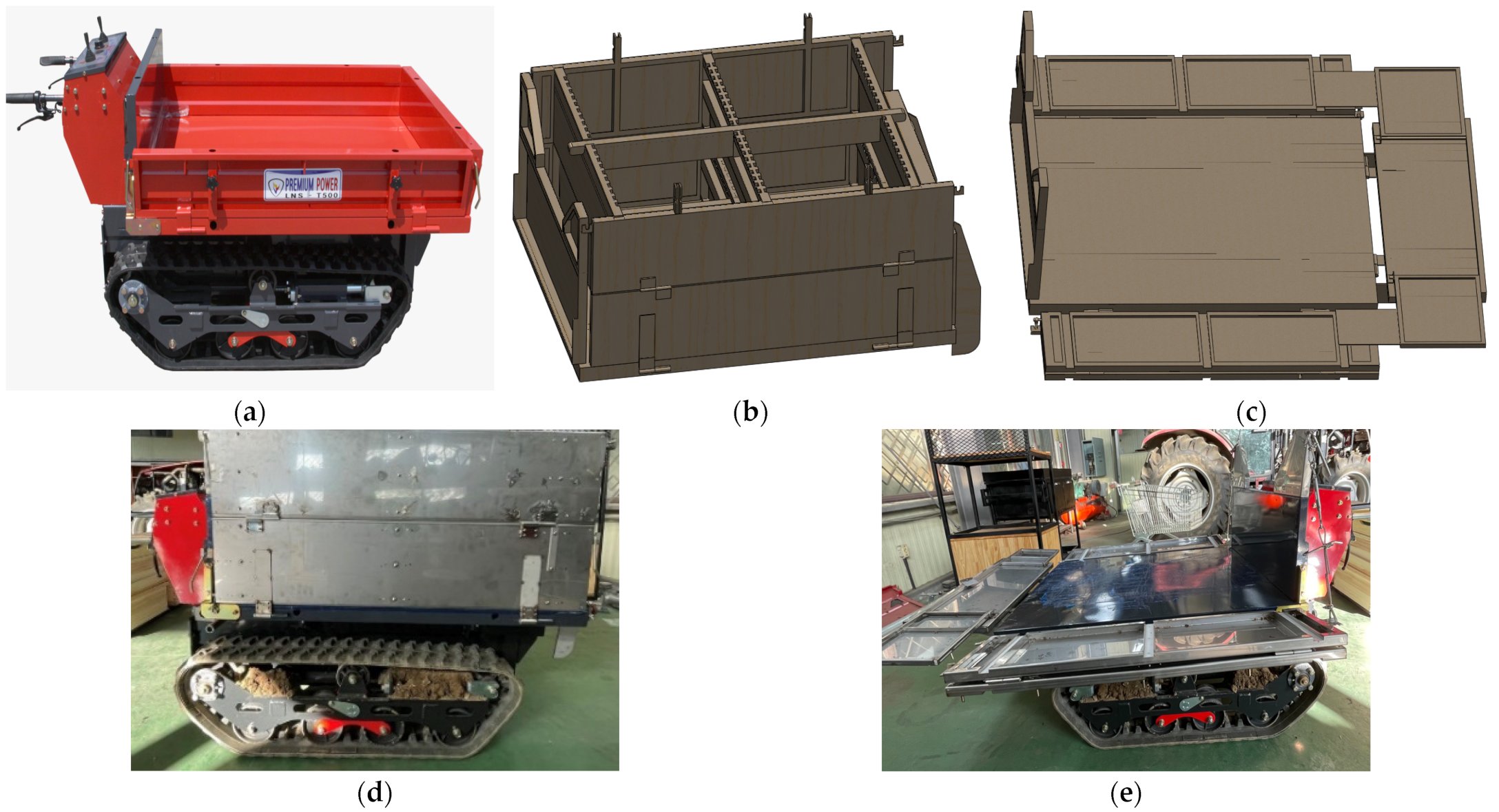
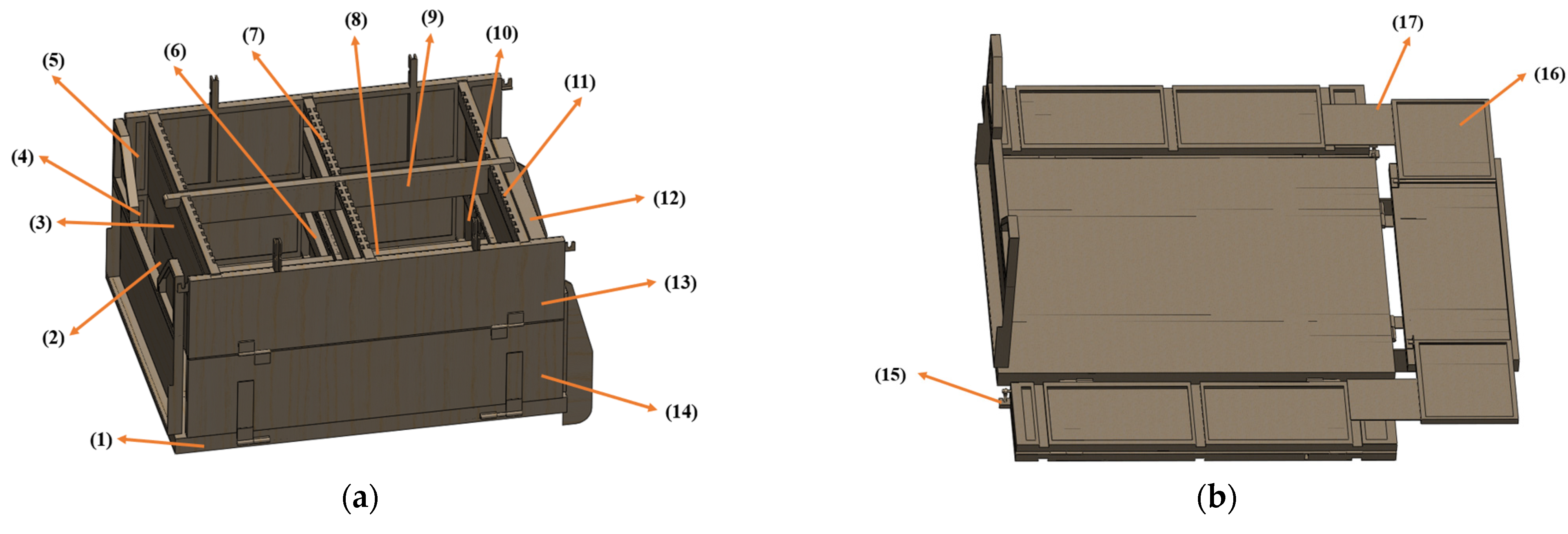
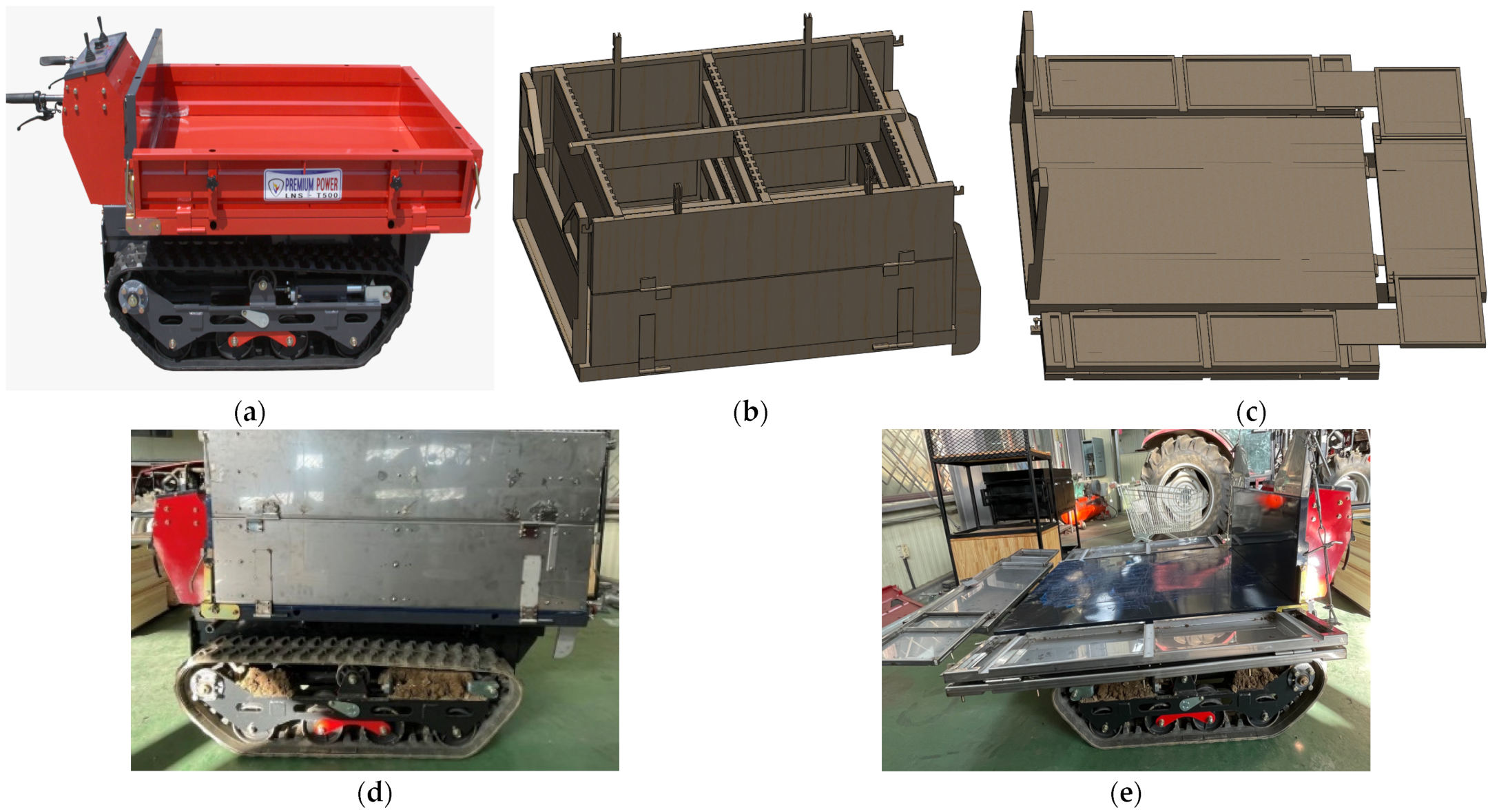
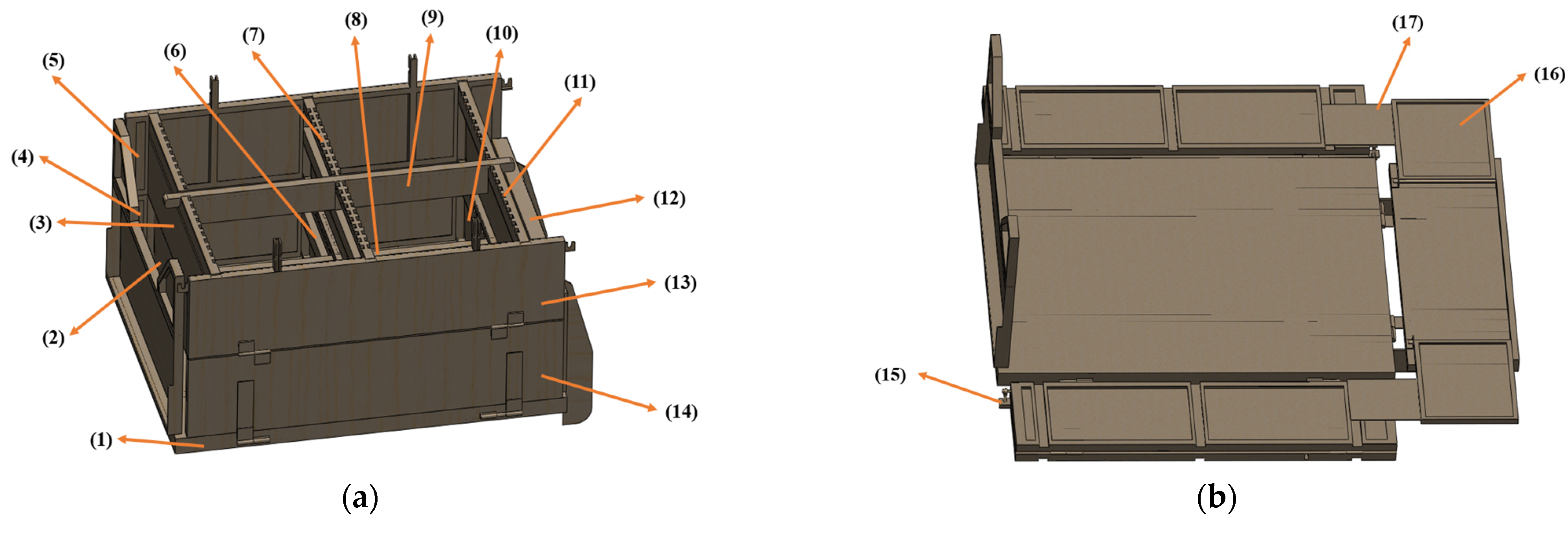
2.1. Multi-Functional Tracked Beekeeping Vehicle
2.2. Dynamics Modeling and Analysis of Multifunctional Tracked Vehicle
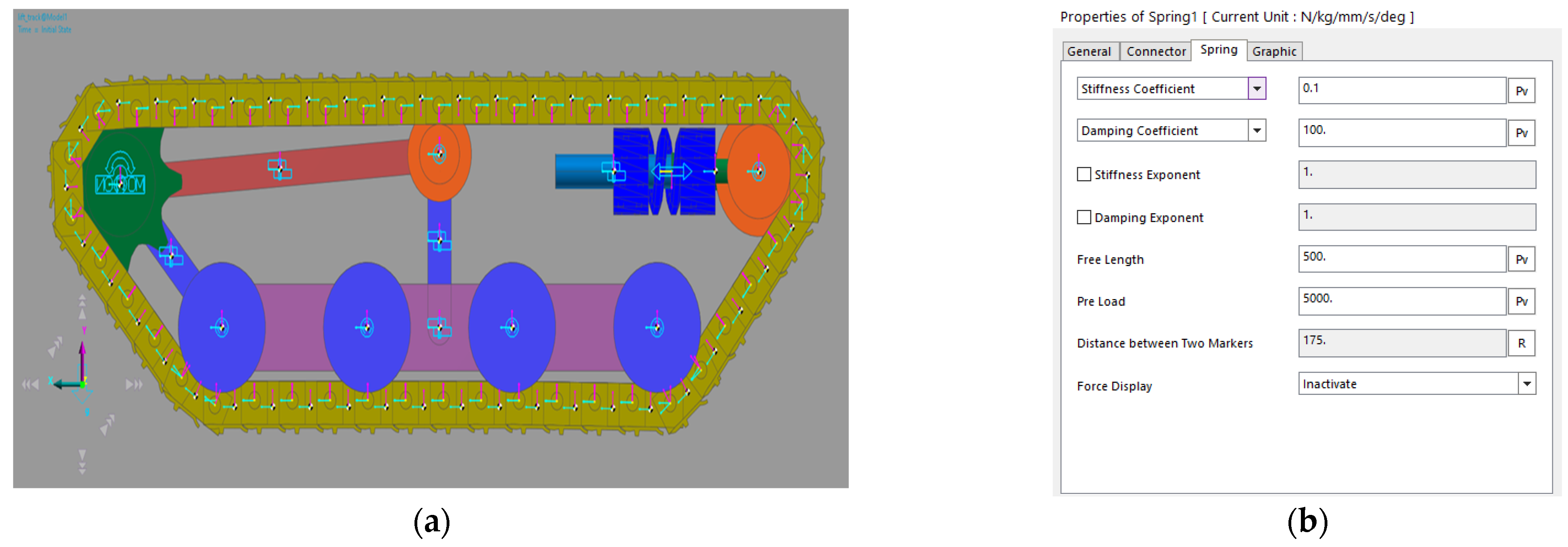
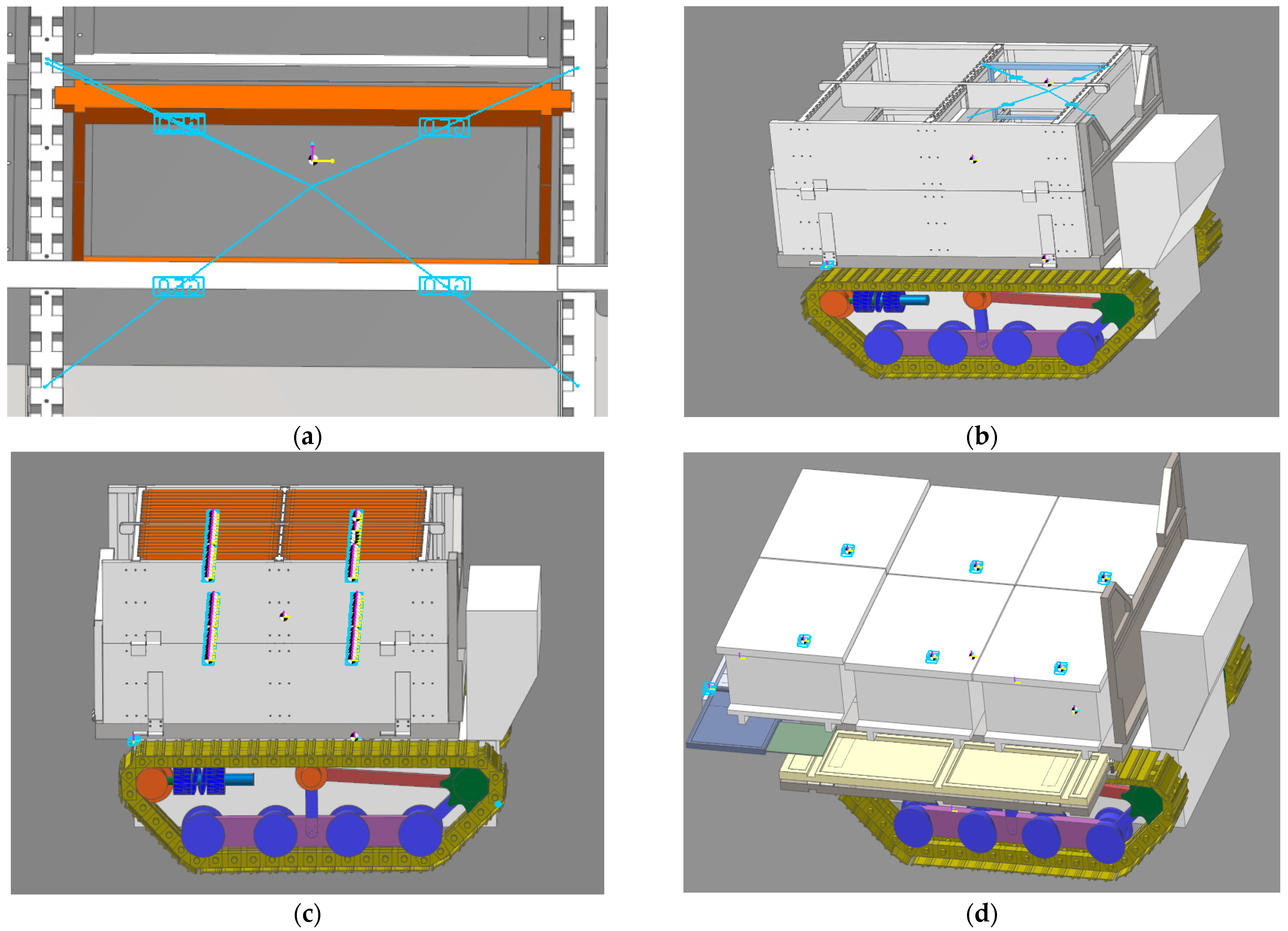
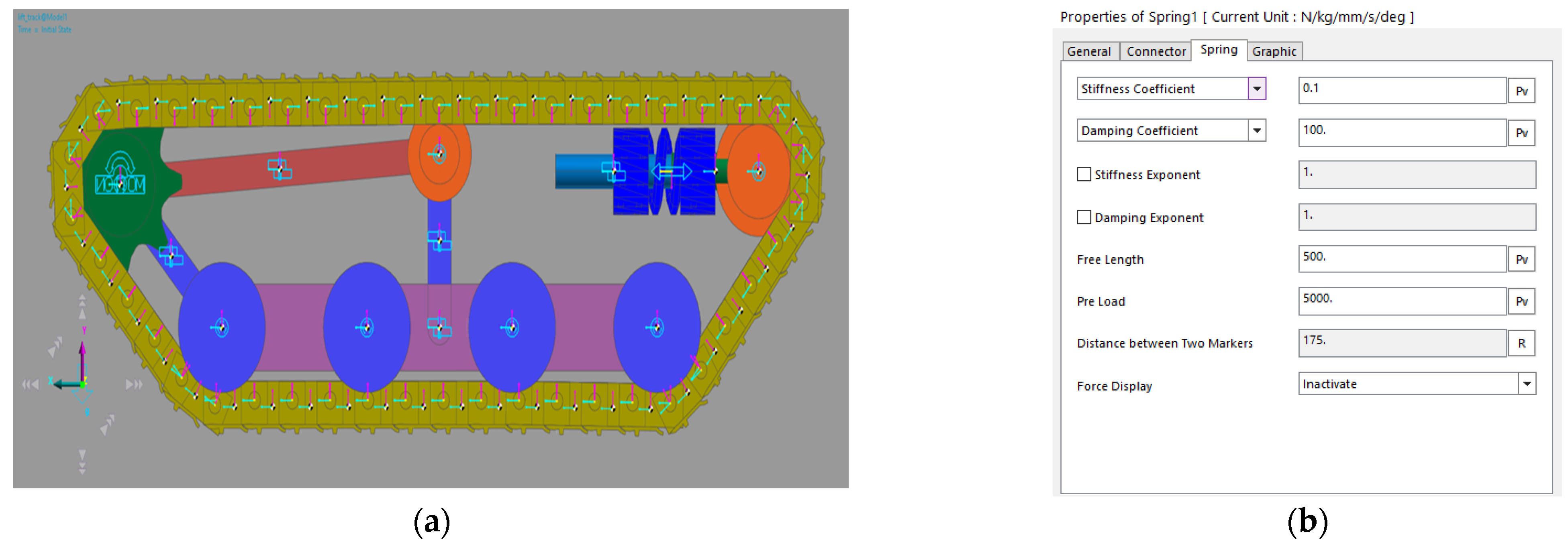
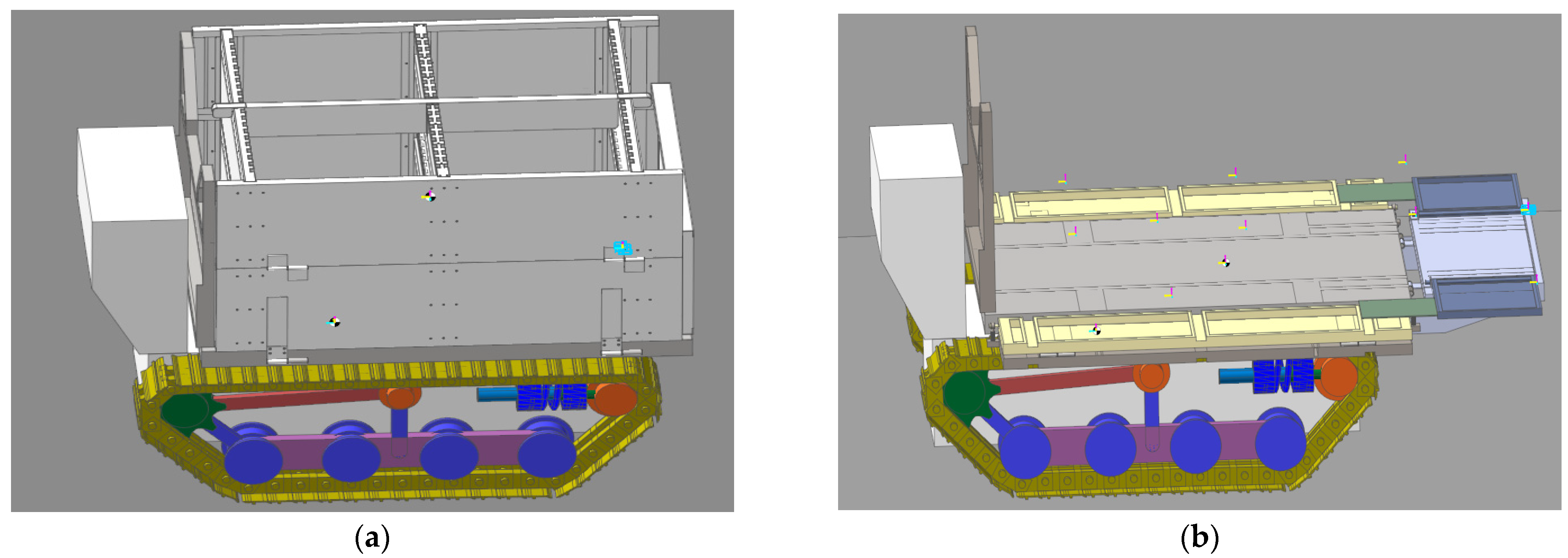
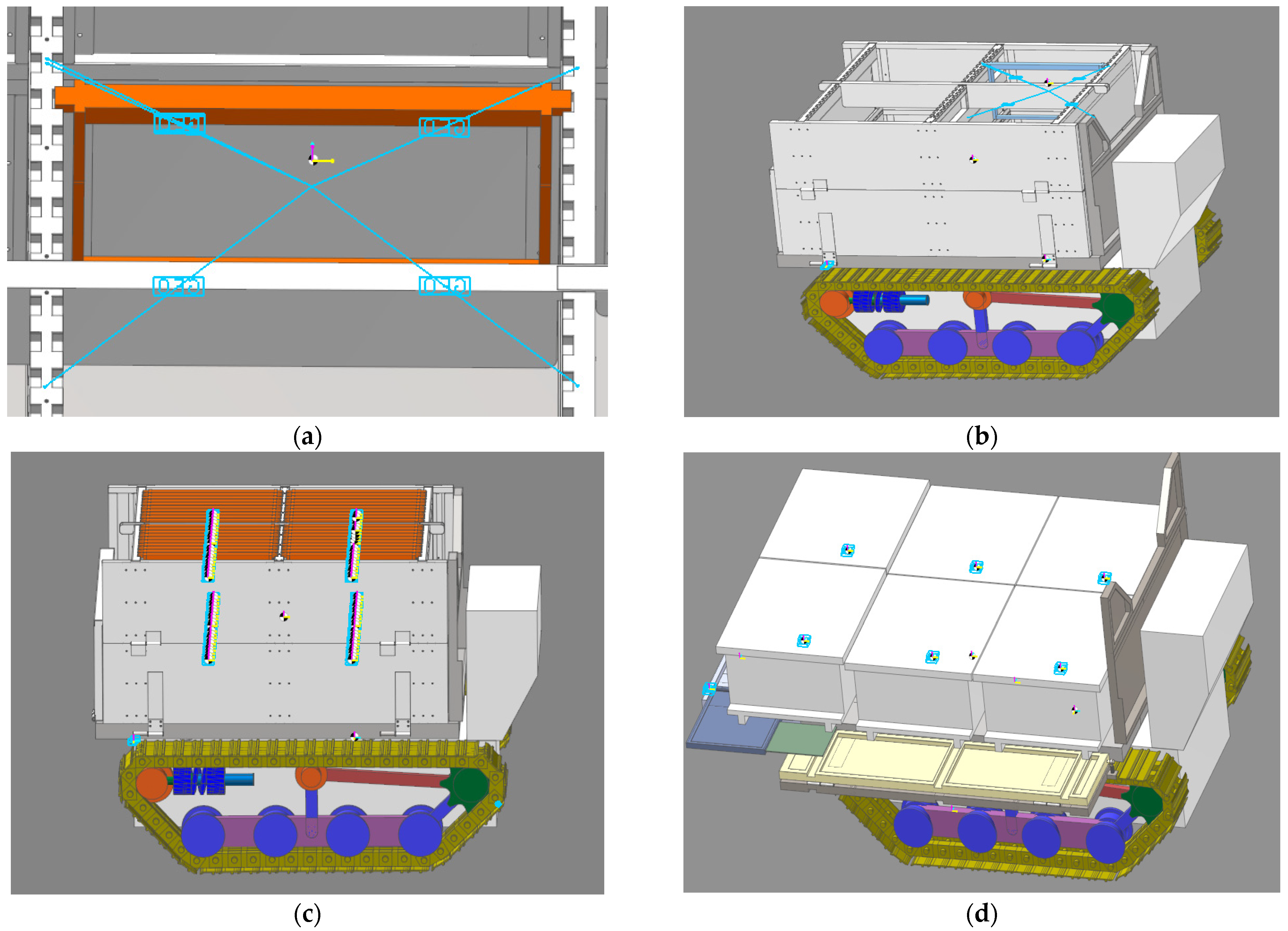
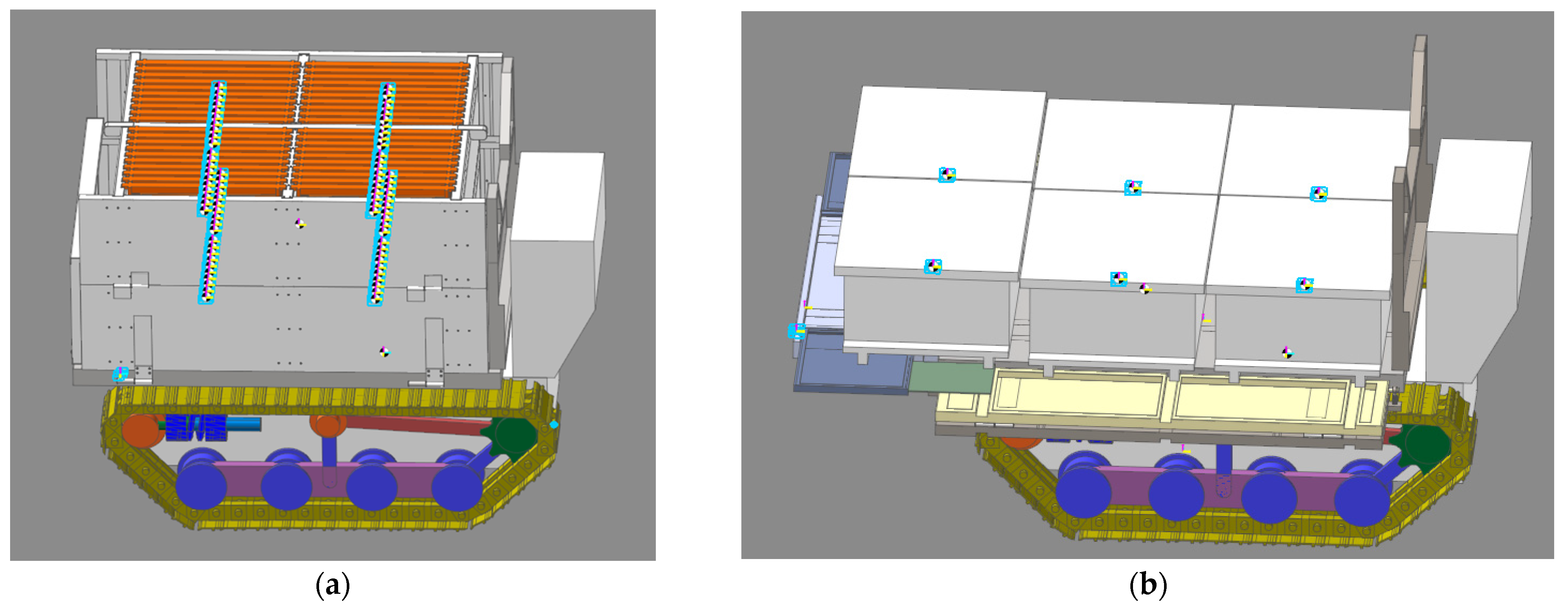
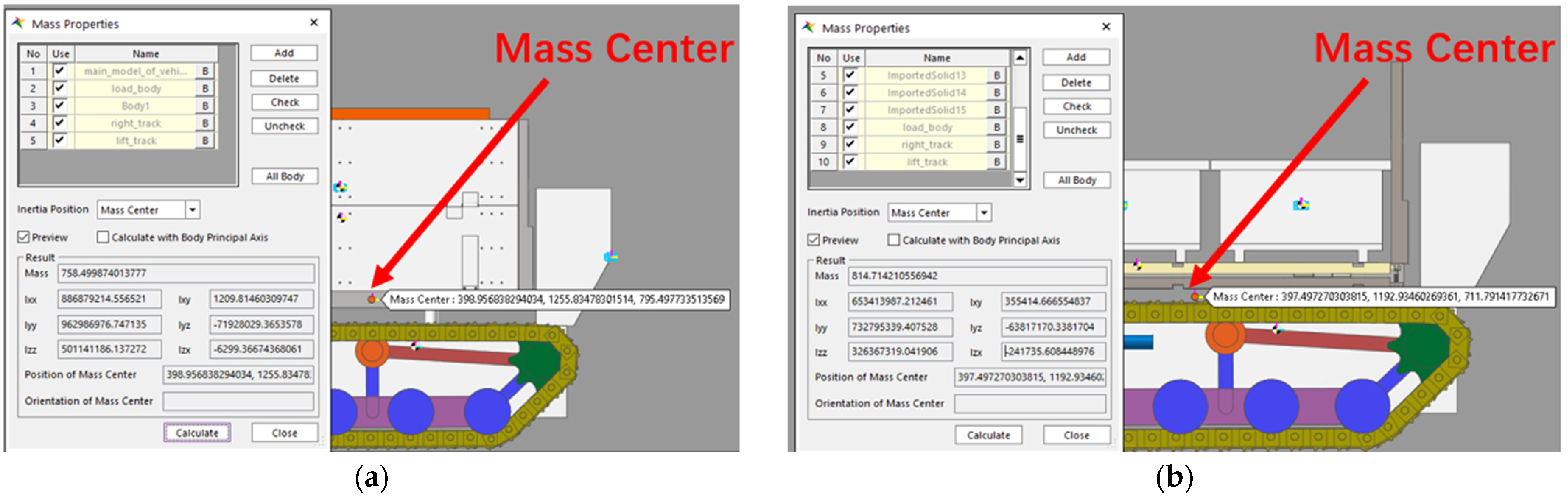
2.2.1. Dynamics Modeling of Multifunctional Tracked Vehicle
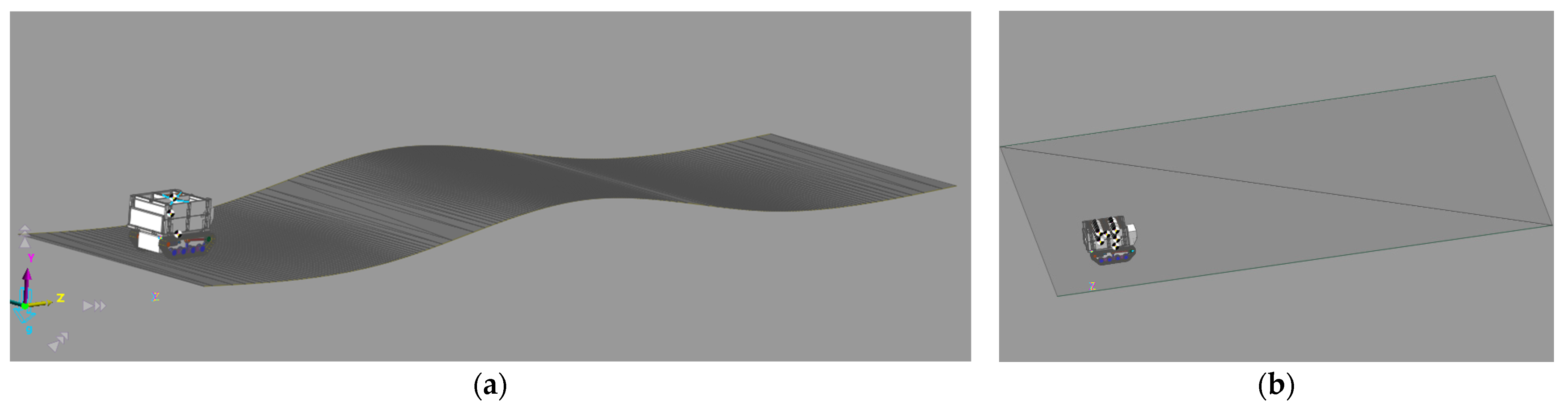
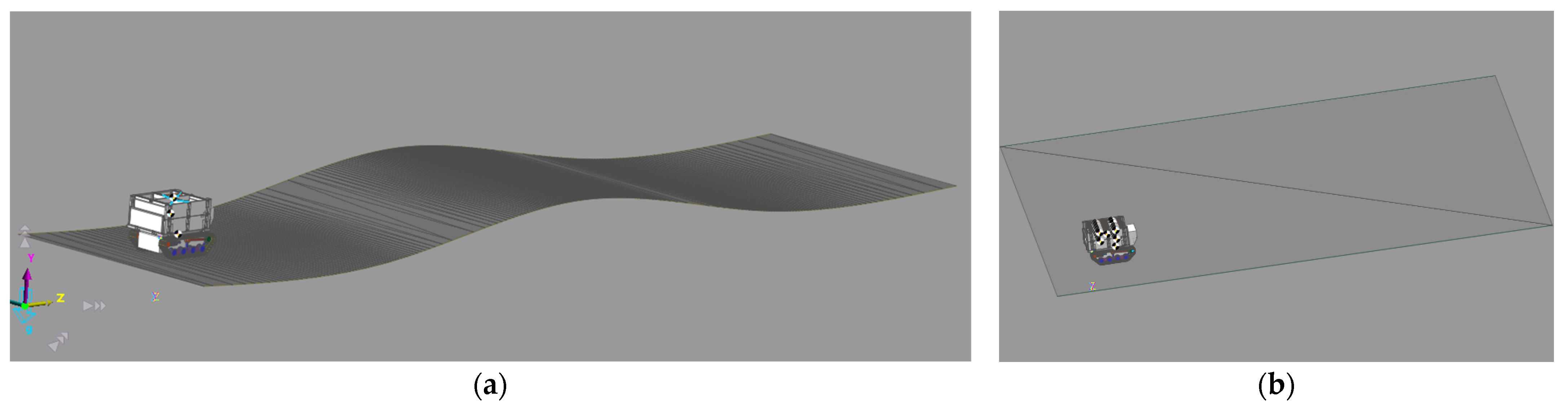
2.2.2. Dynamics Analysis of Multifunctional Tracked Vehicle
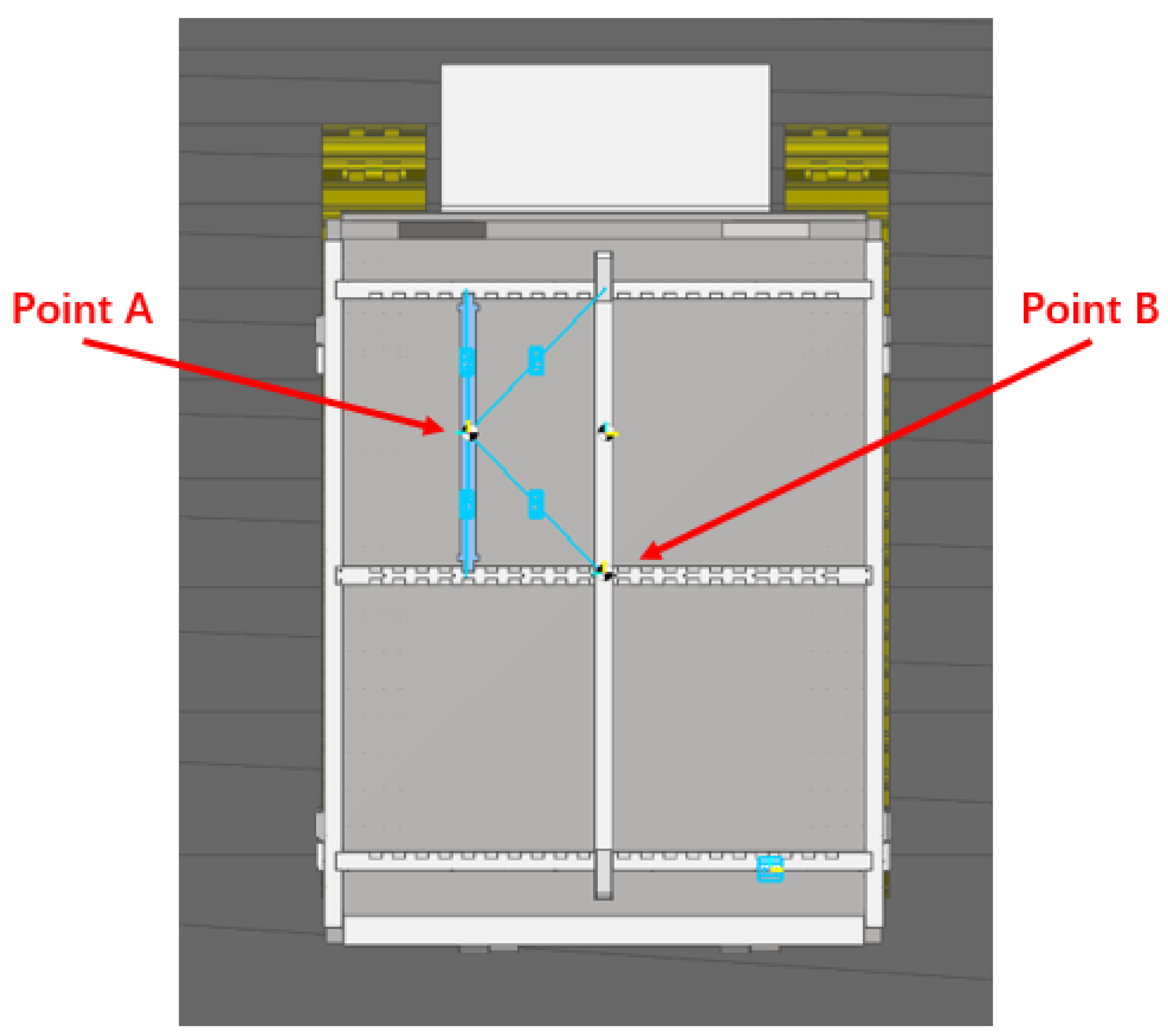
2.2.3. Analysis Details Related to the Loading of a Single Bee Frame
2.2.4. Analysis Details of Box Fully Loaded with Bee Frames and Fully Loaded with Beehives
2.2.5. Design of Runtime Functions
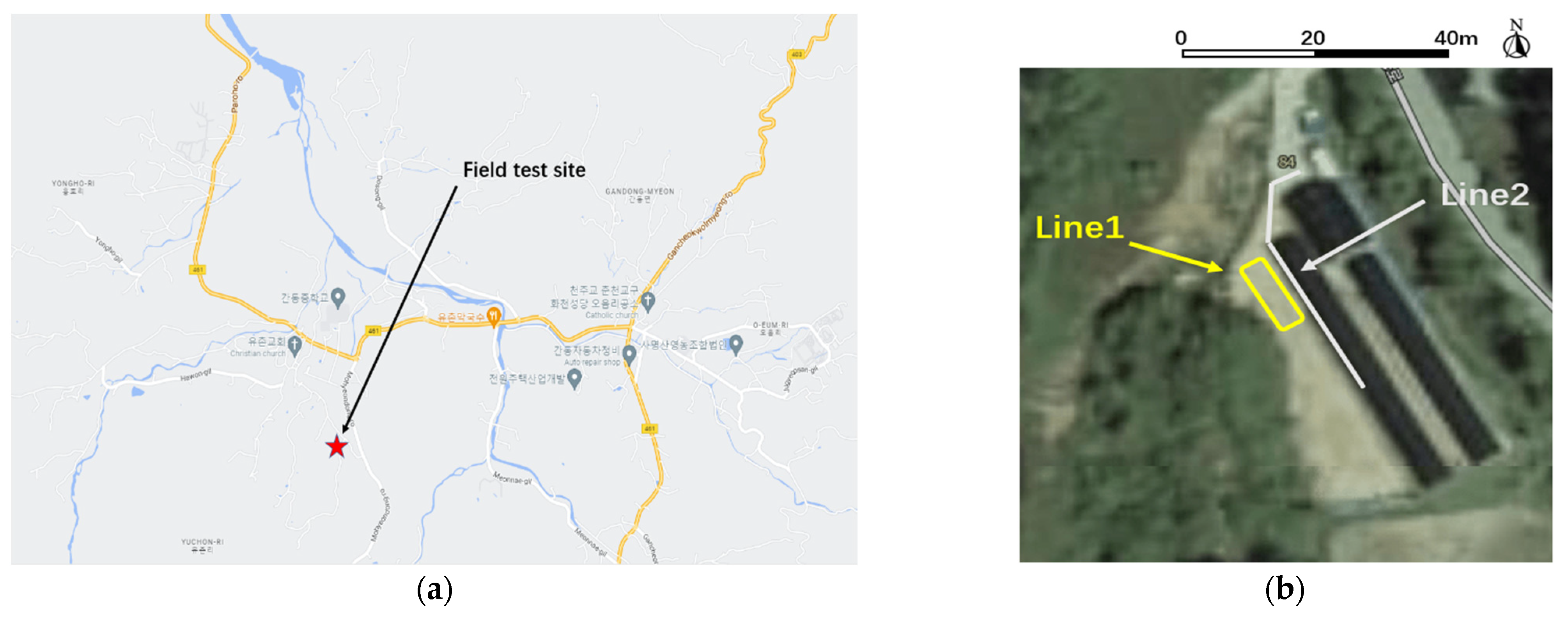
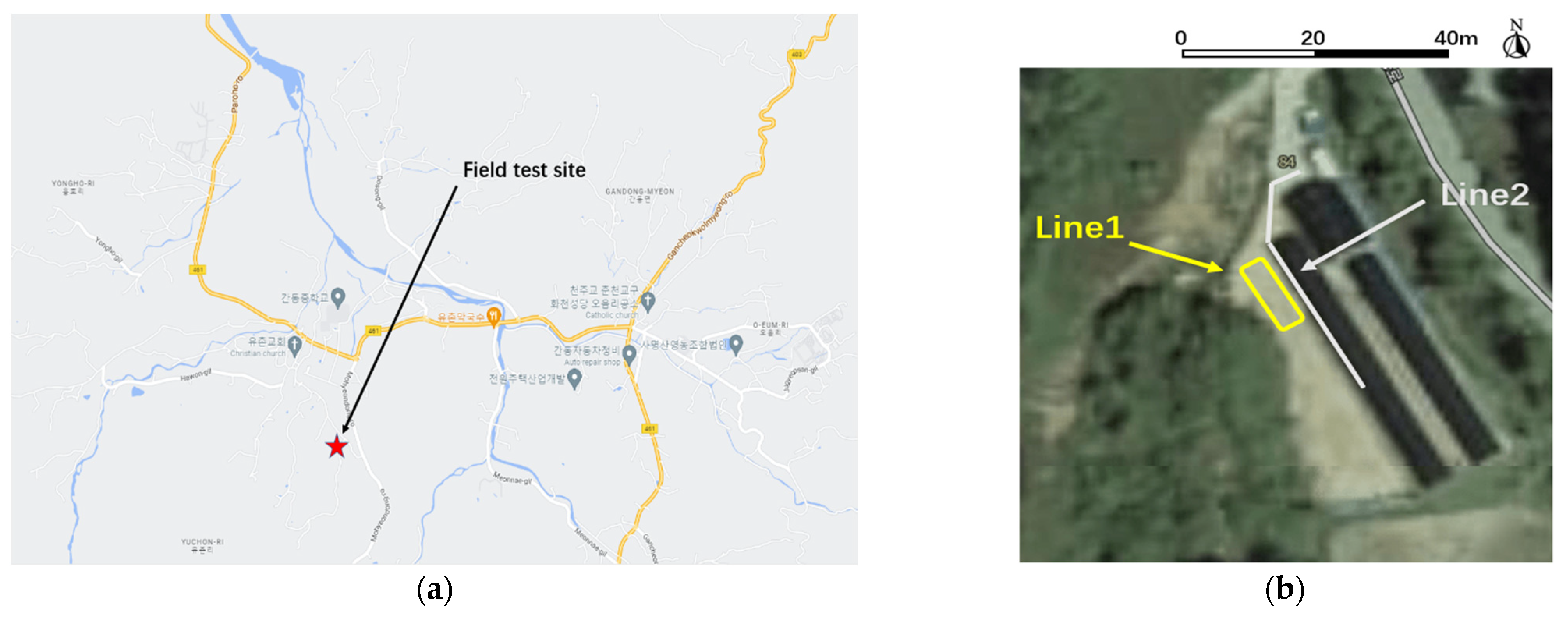
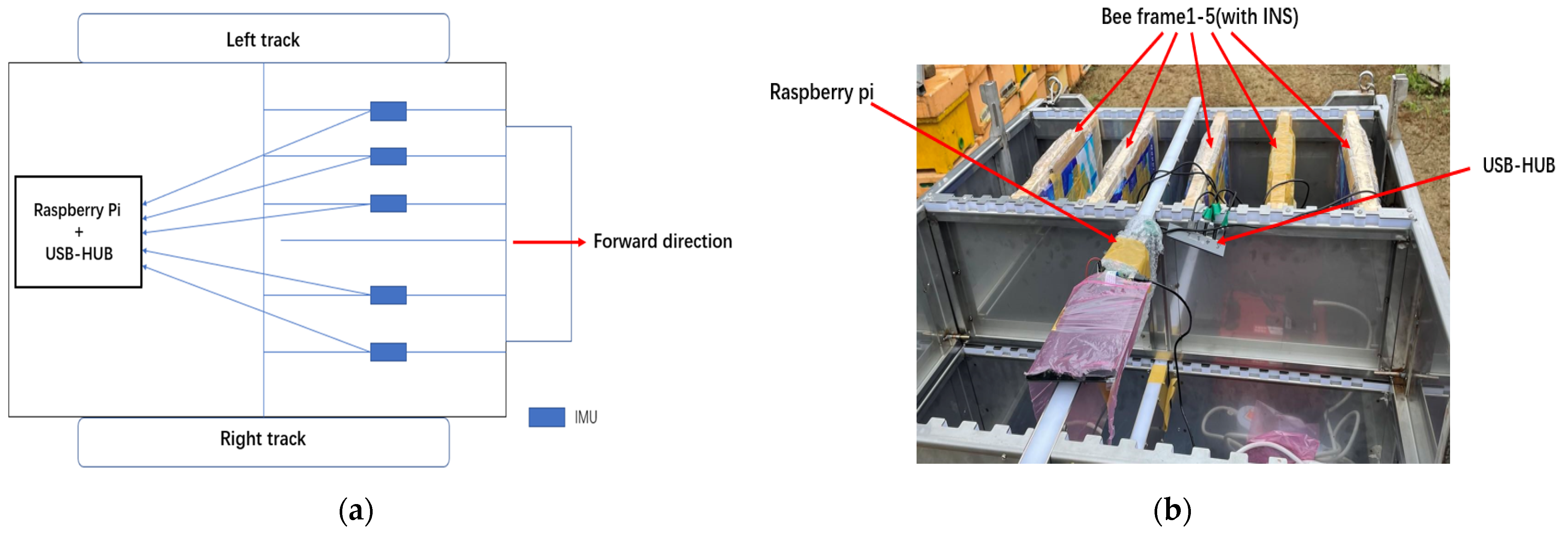
2.3. Field Test Design and Validation of Multifunctional Tracked Vehicle
2.4. Stability Analysis Criterion and Experimental Design
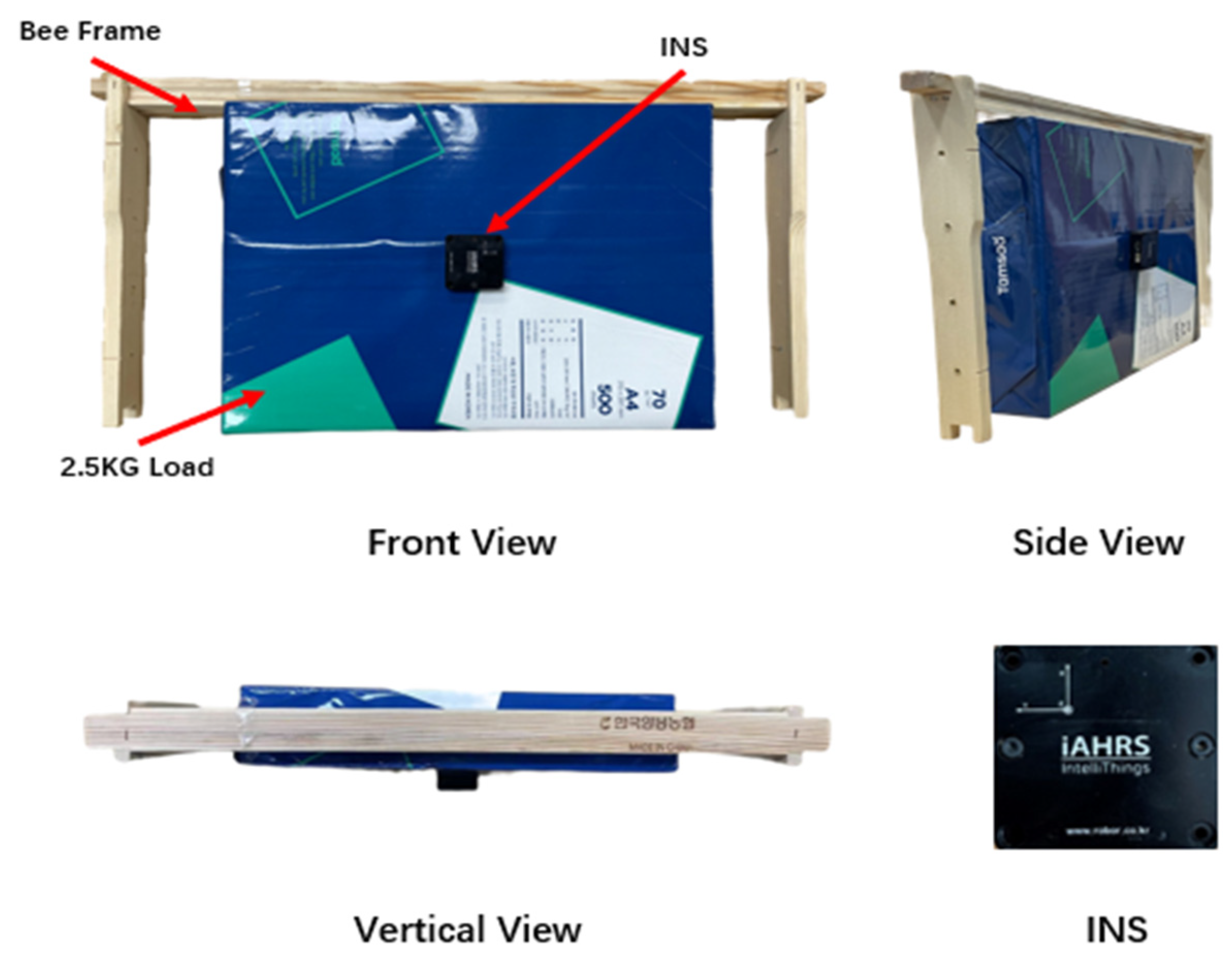
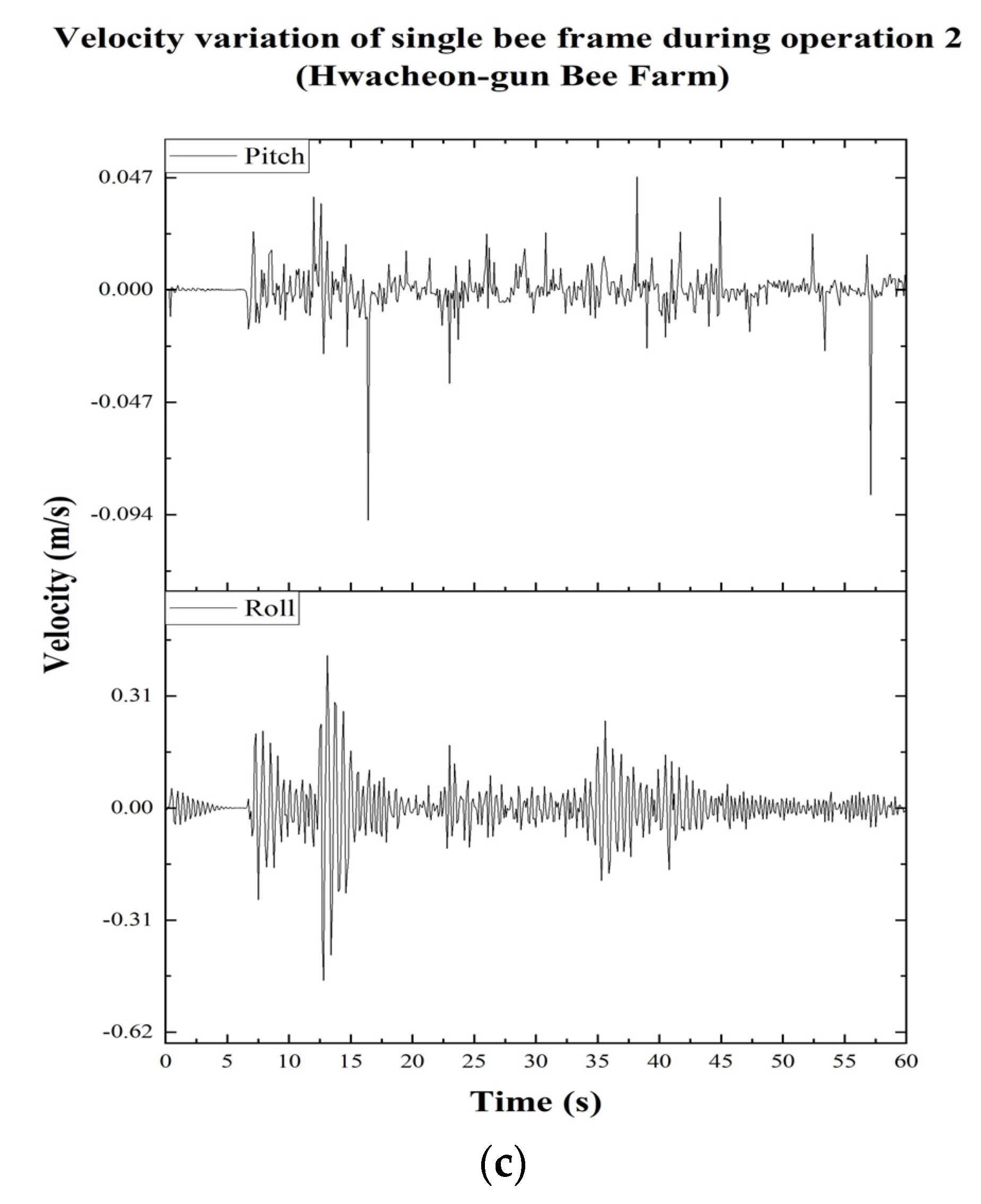
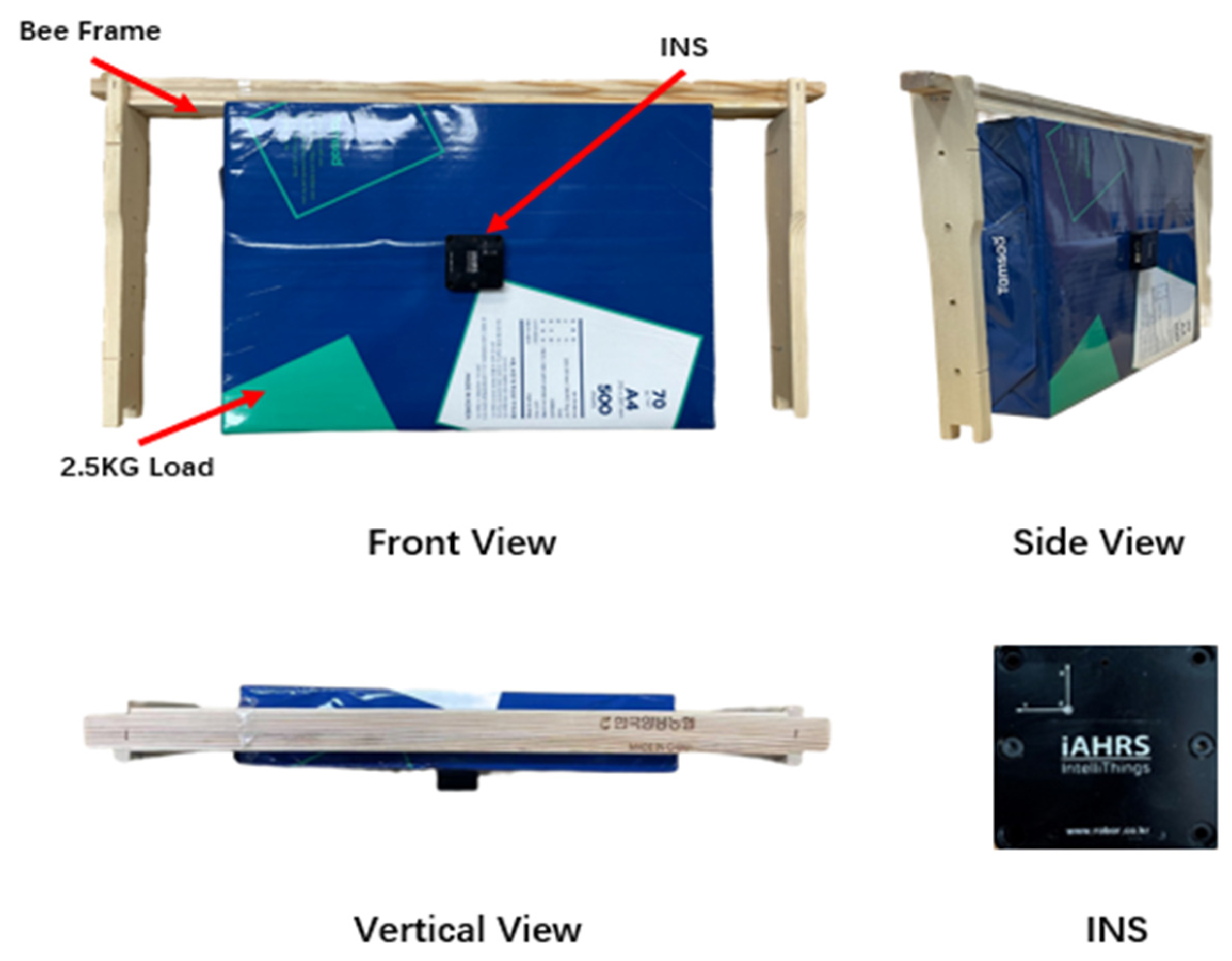
2.4.1. Single Bee Frame Transportation Analysis
2.4.2. Stability Analysis of Fully Loaded Bee Frames and Beehives
3. Results
3.1. Simulation Results
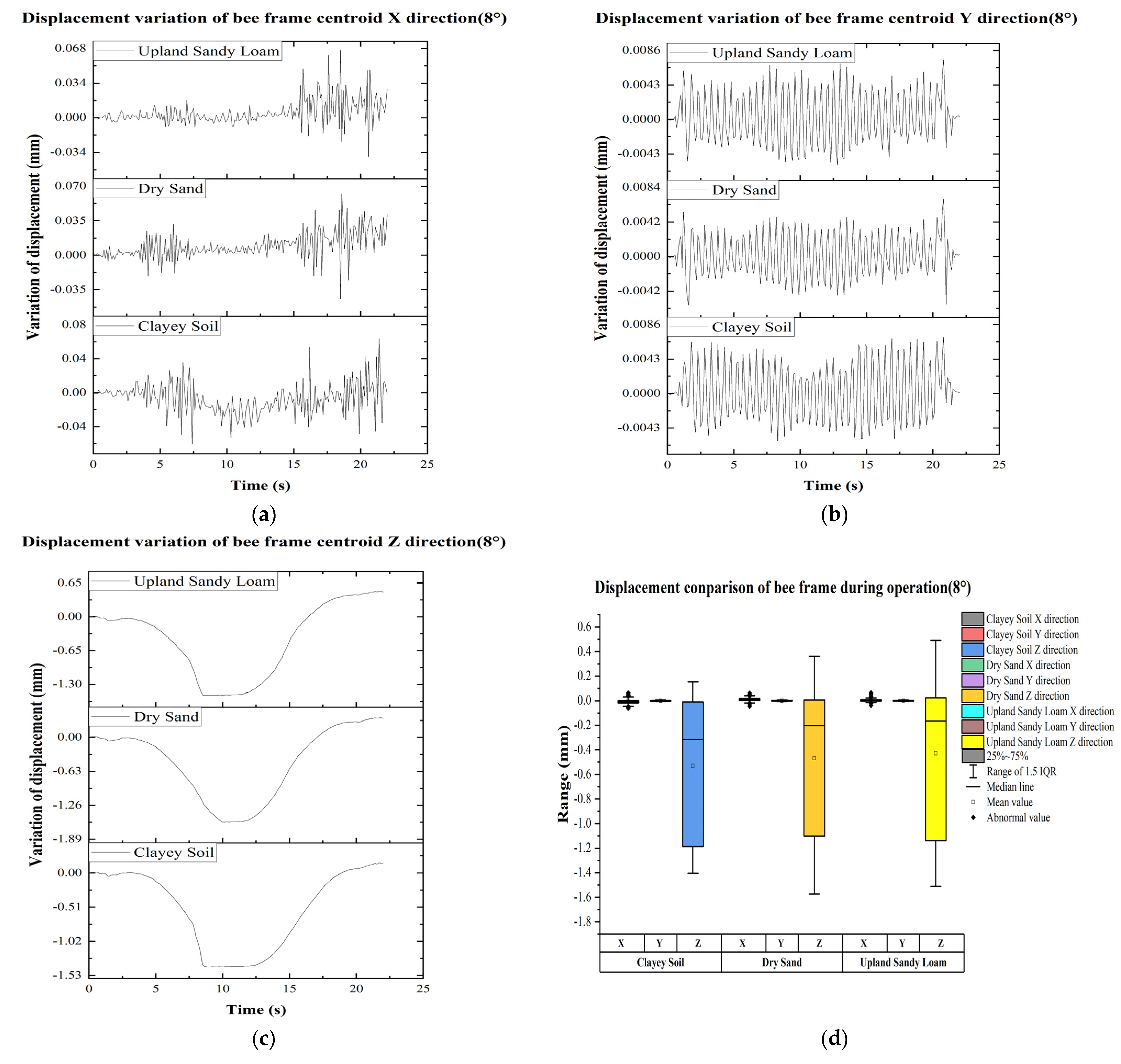
3.1.1. Results and Analysis of the Transportation of a Single Bee Frame
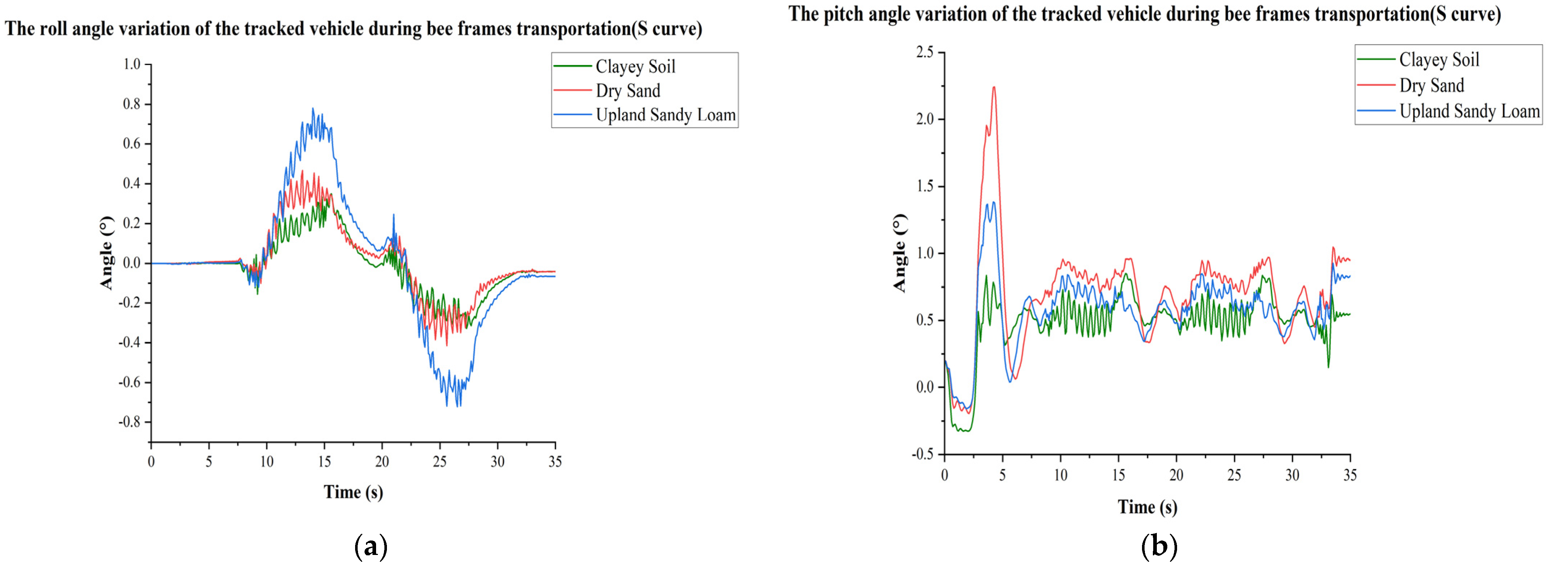
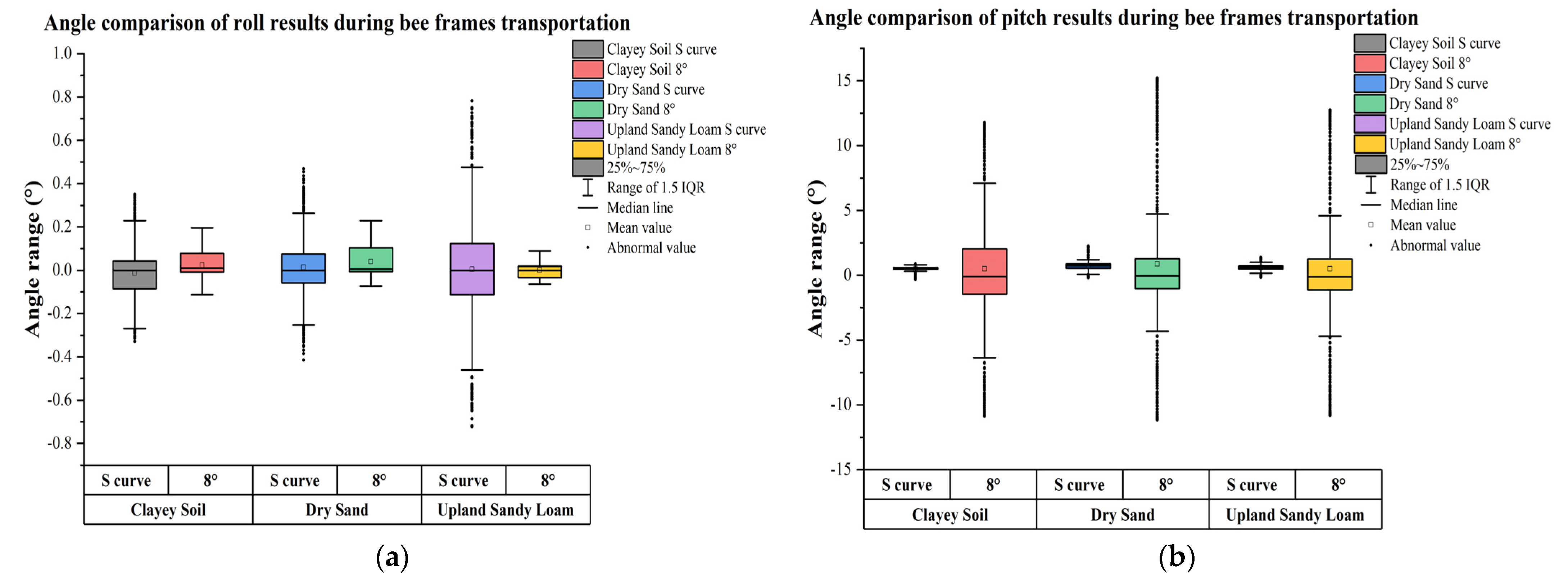
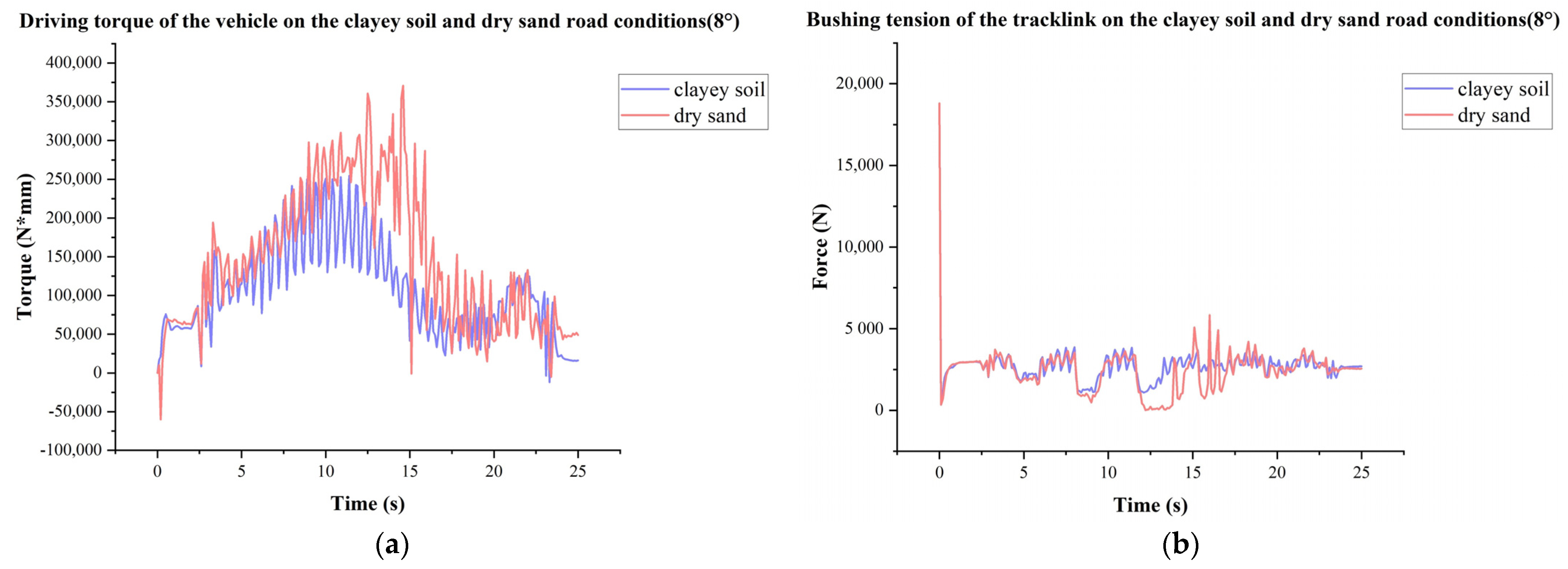
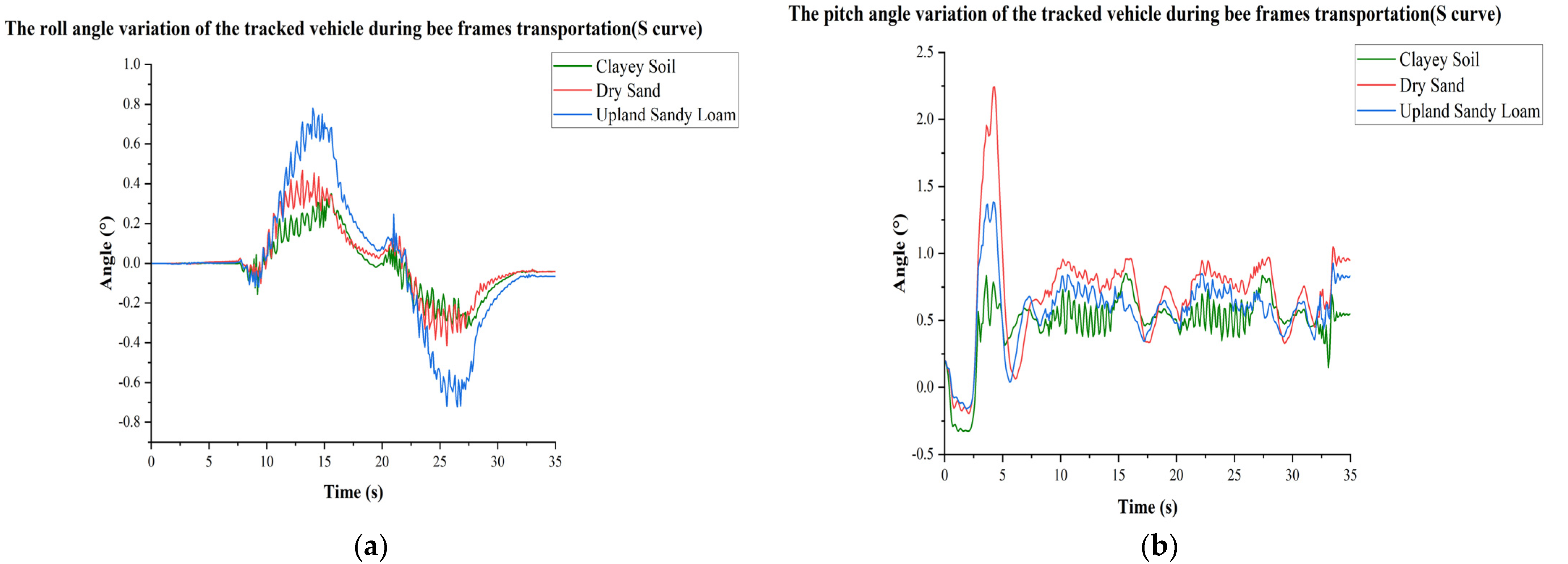
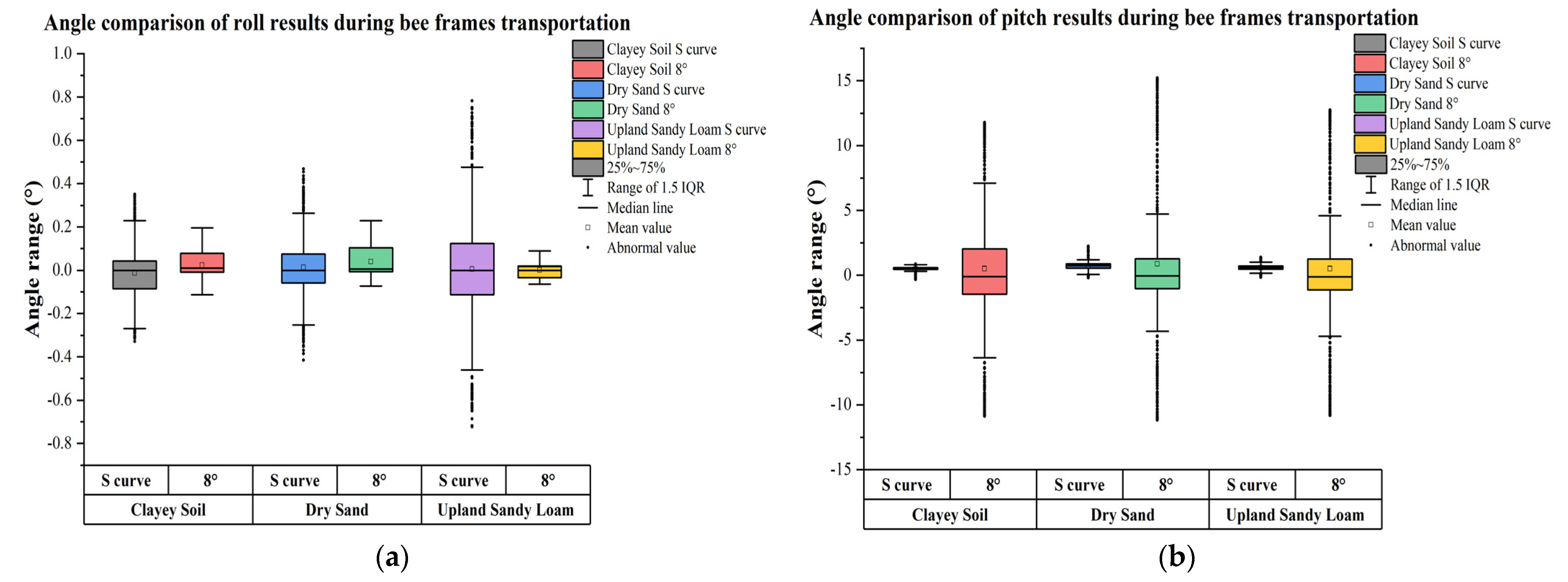
3.1.2. Results and Analysis of the Loading Box Fully Loaded with Bee Frames
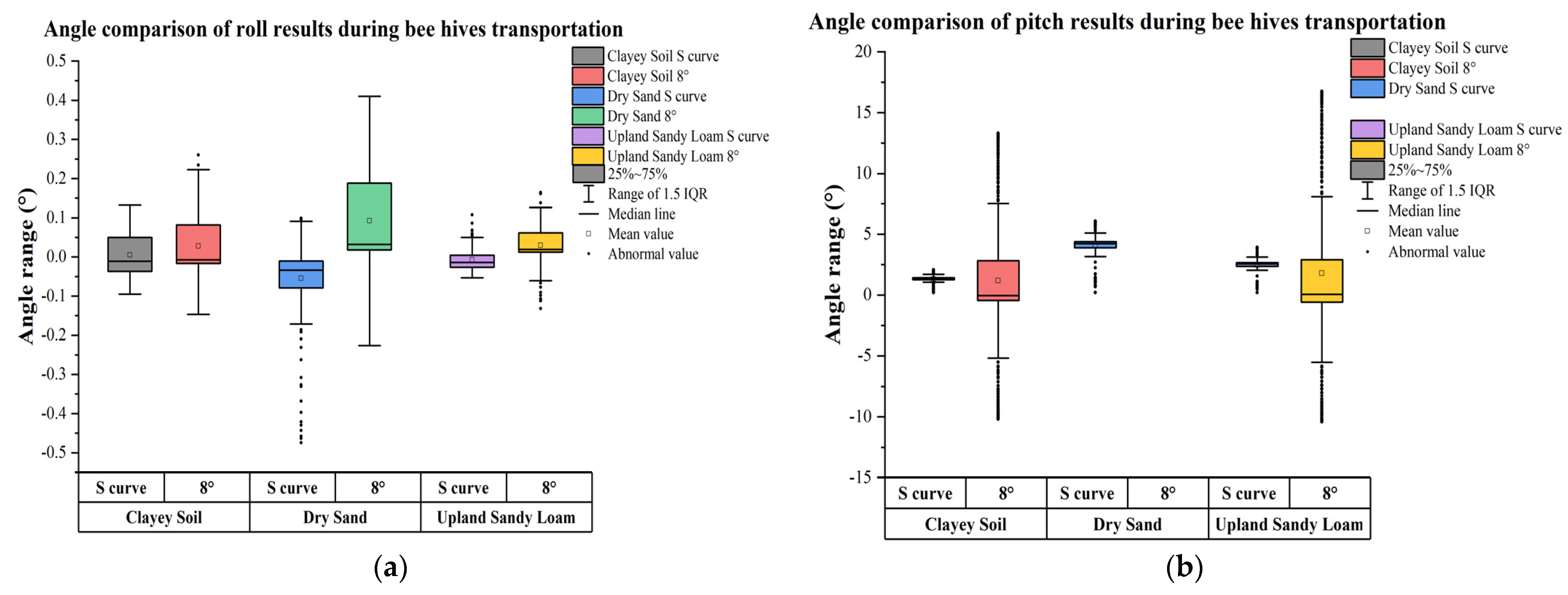
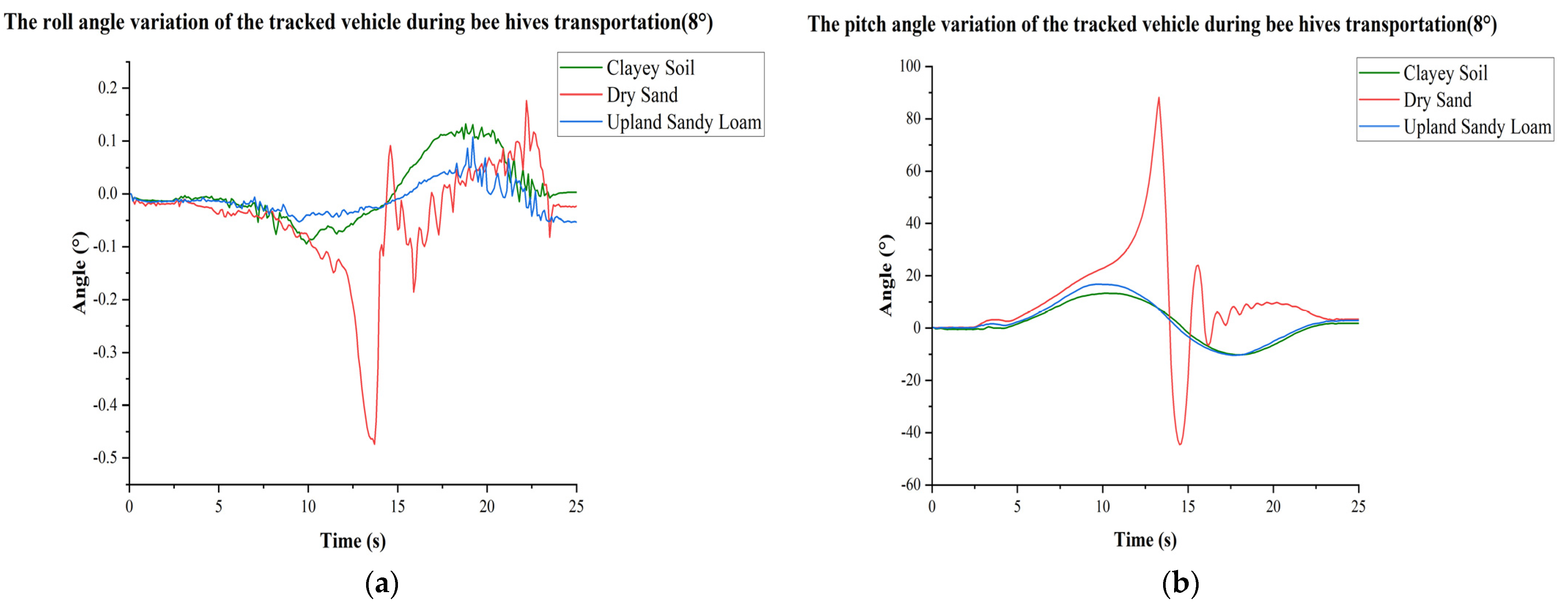
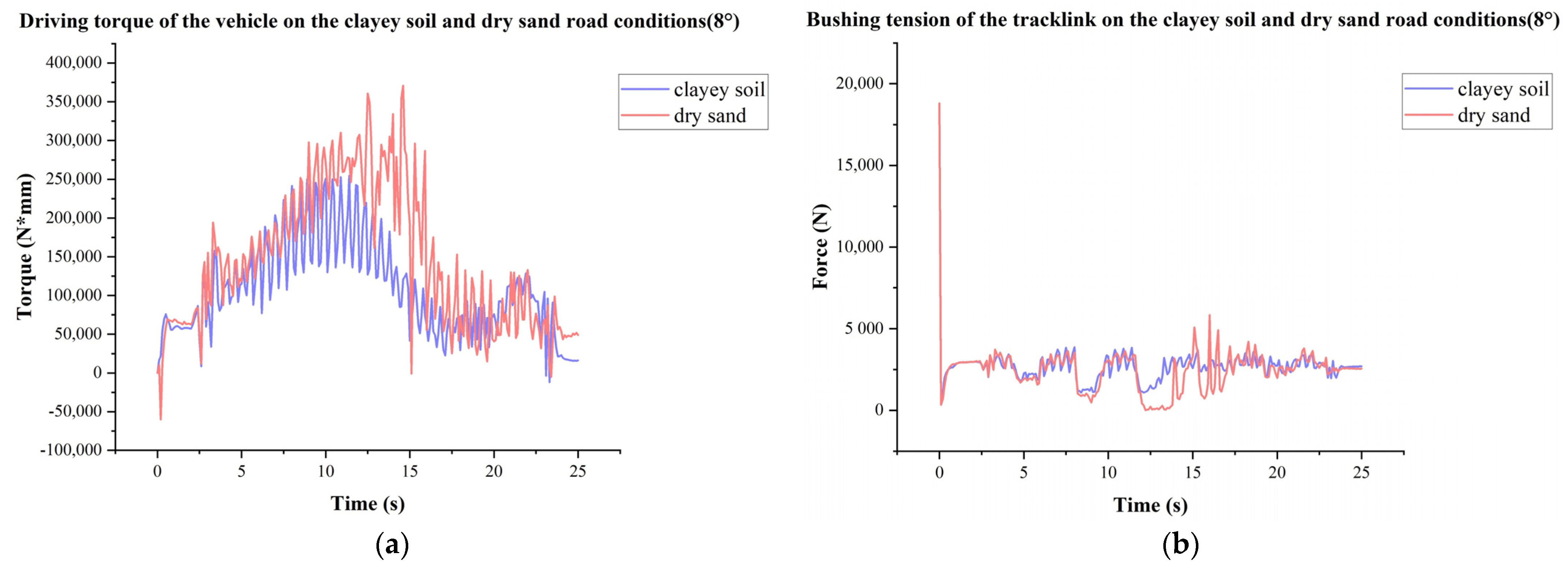
3.1.3. Results and Analysis for Full Load of Beehives
3.2. Field Experiment Results
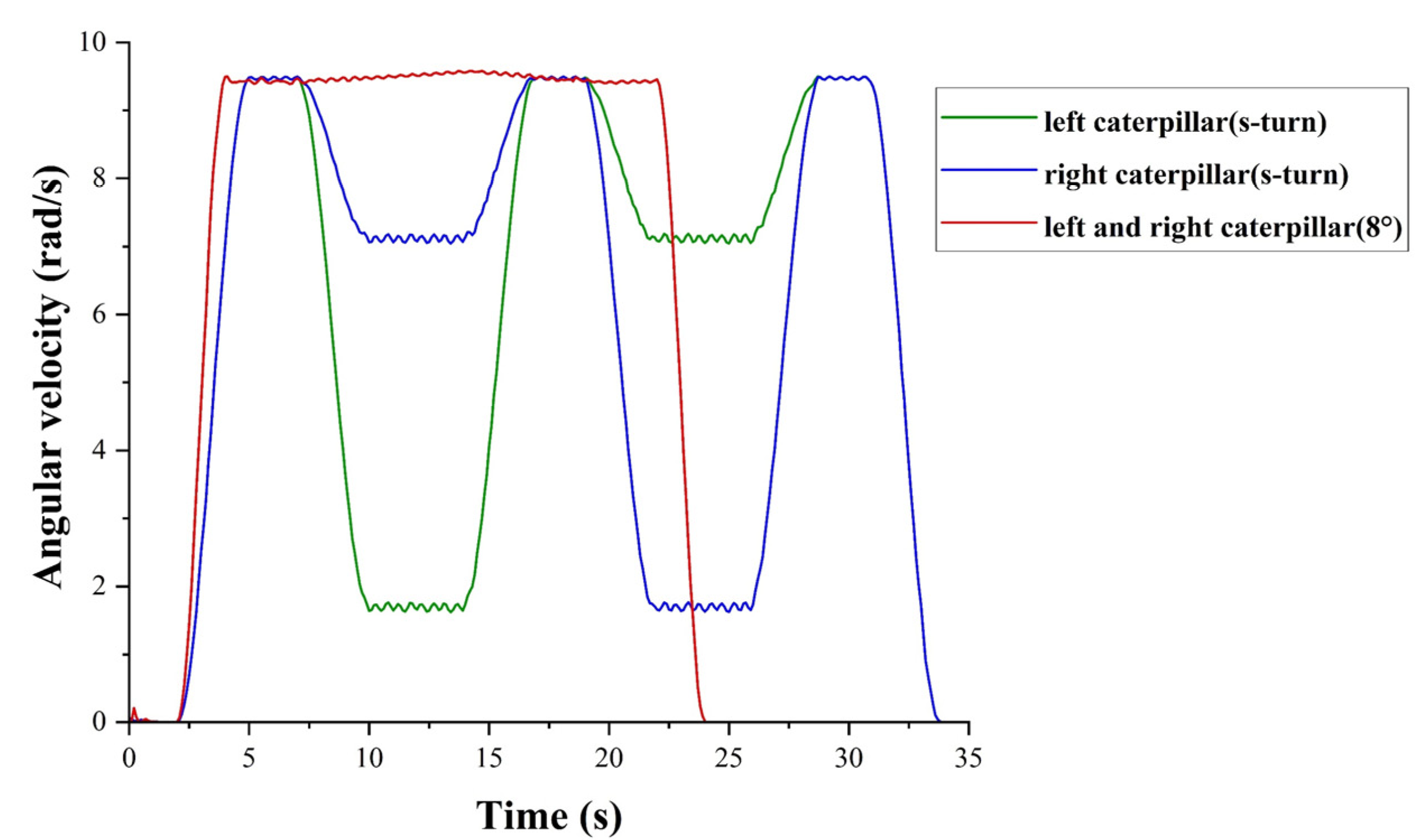
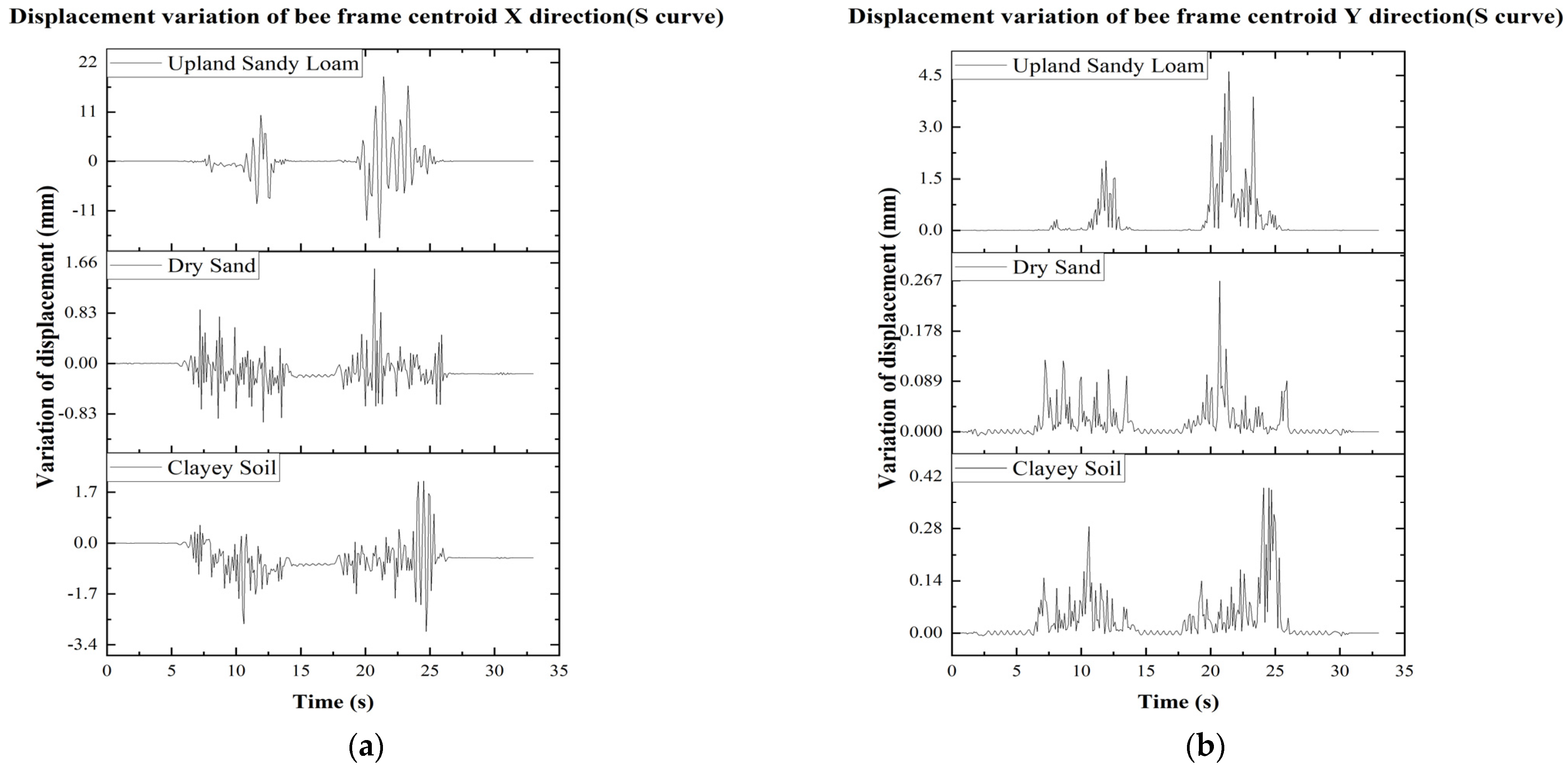
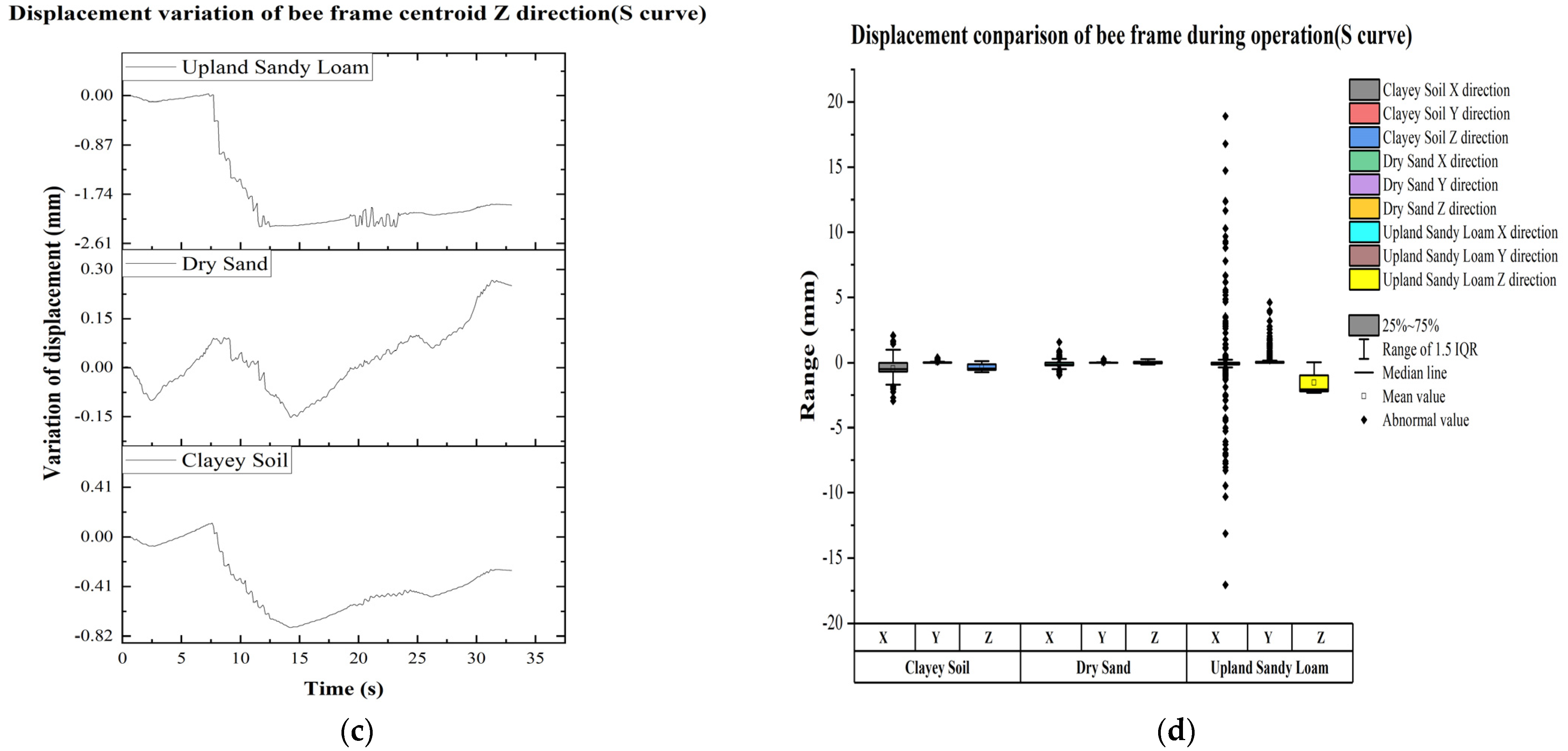
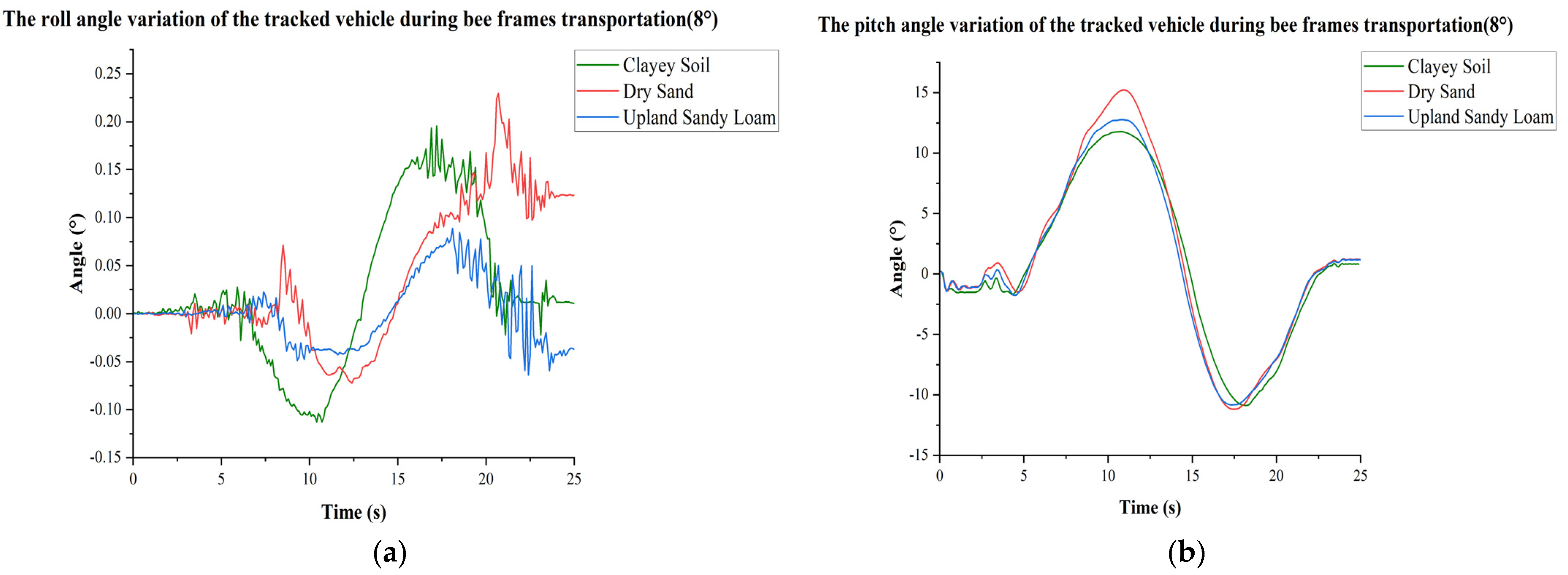
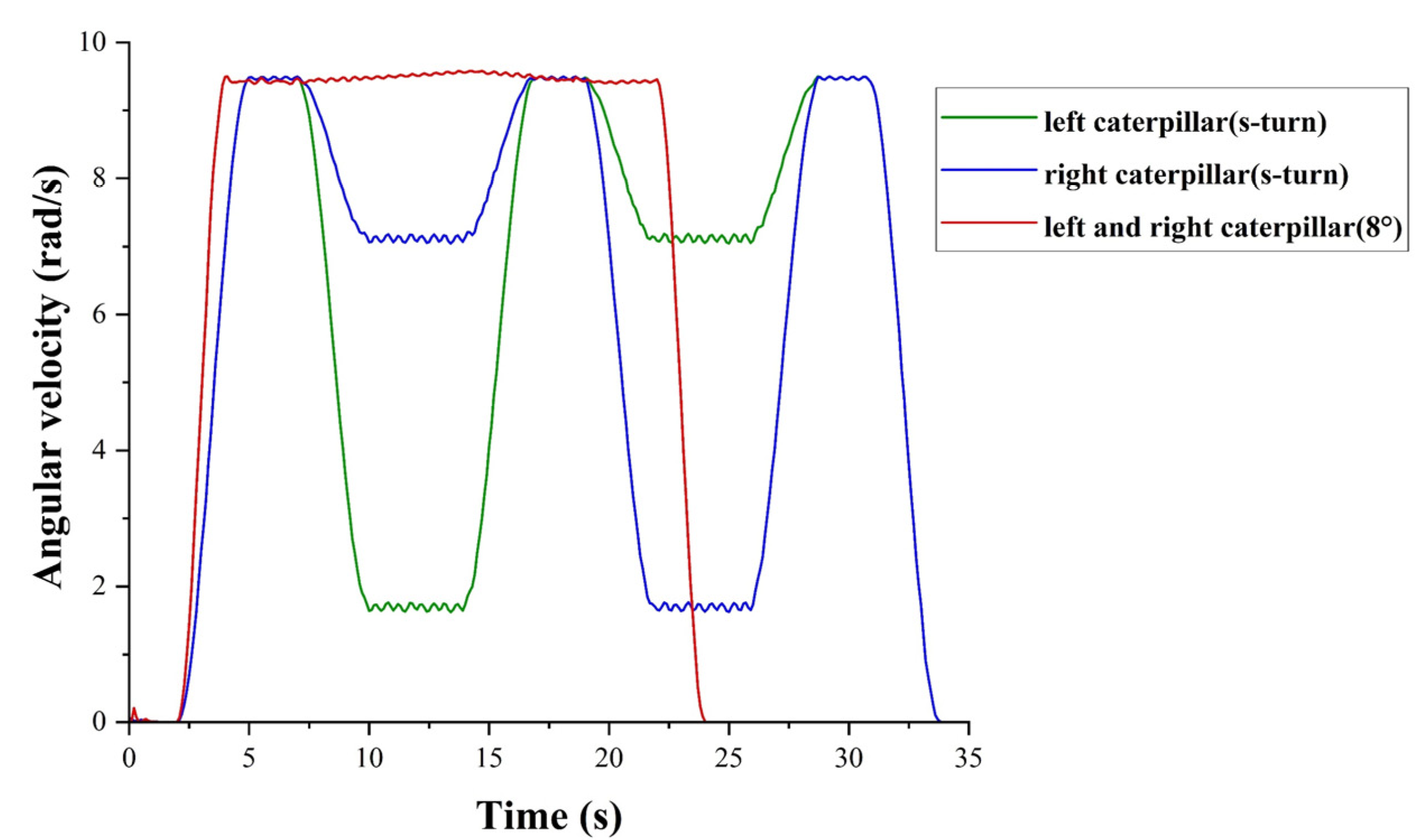
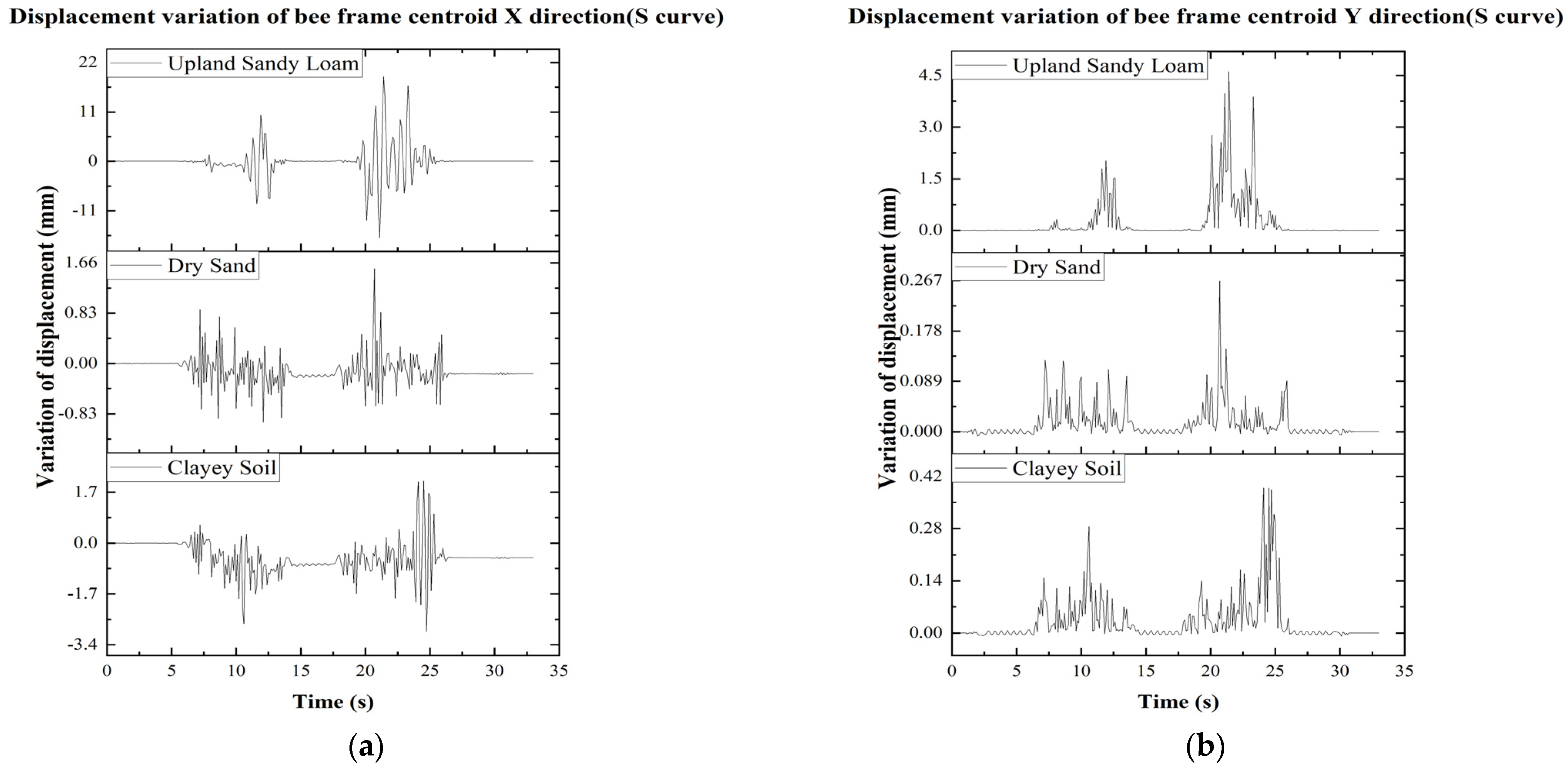
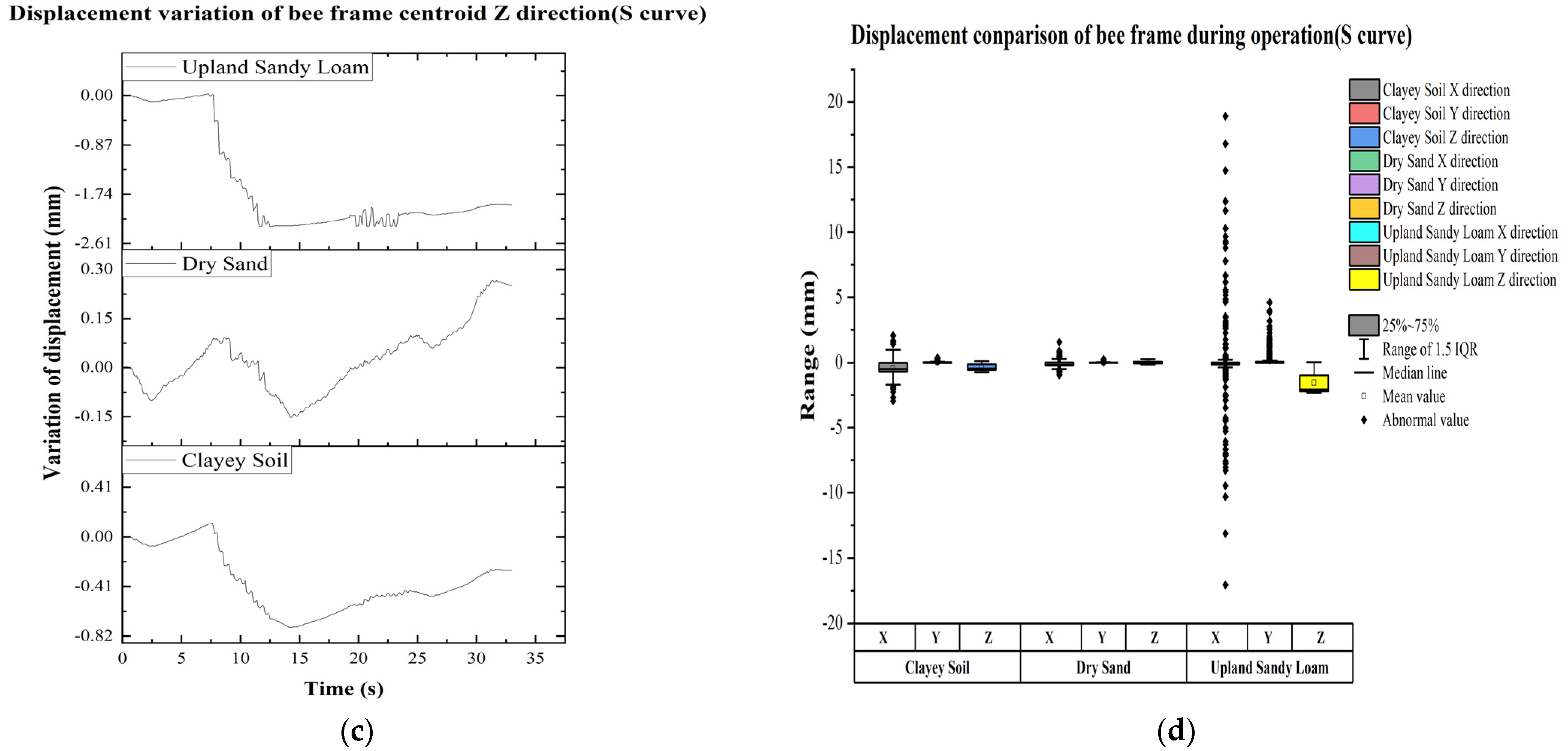
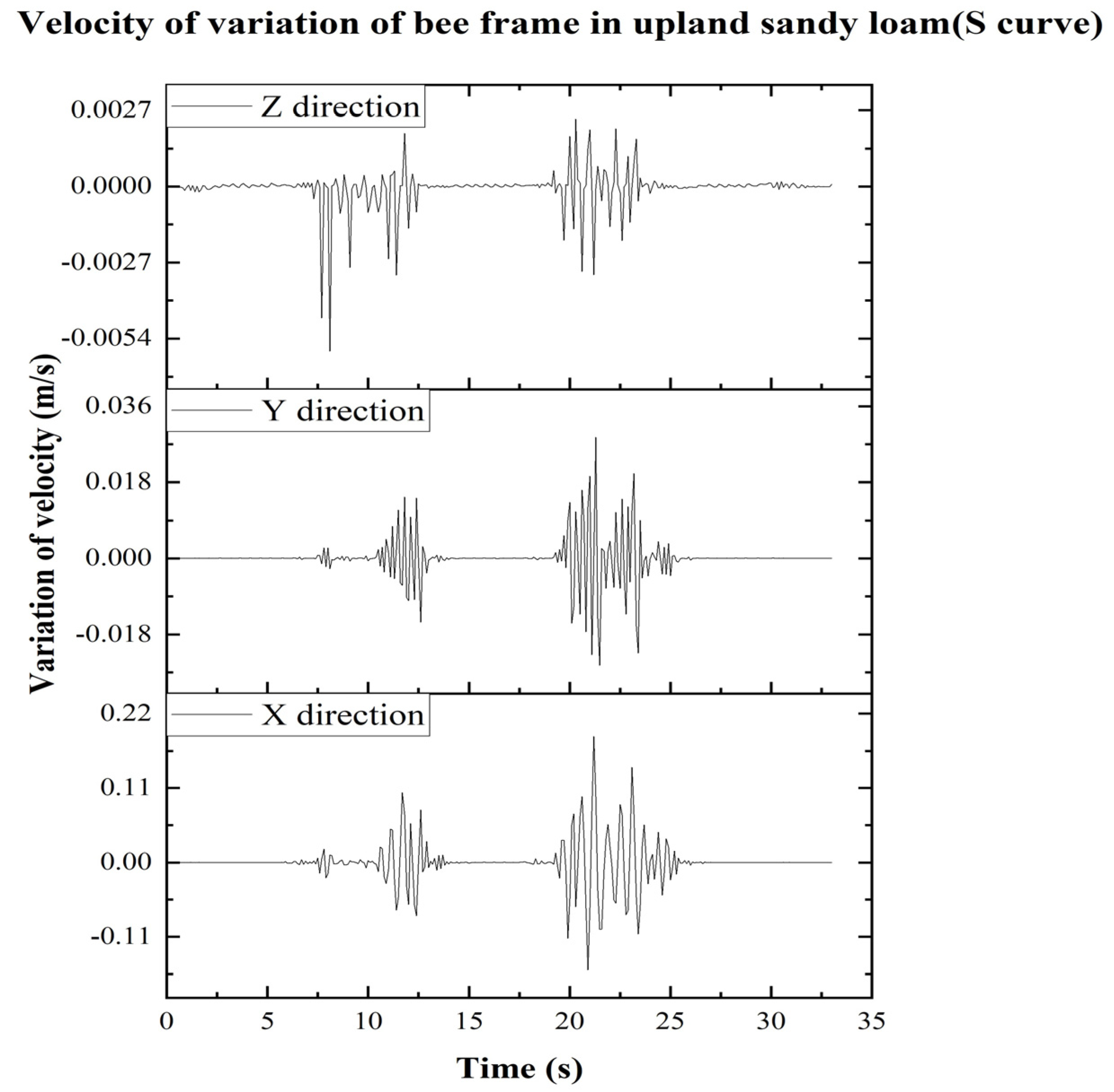
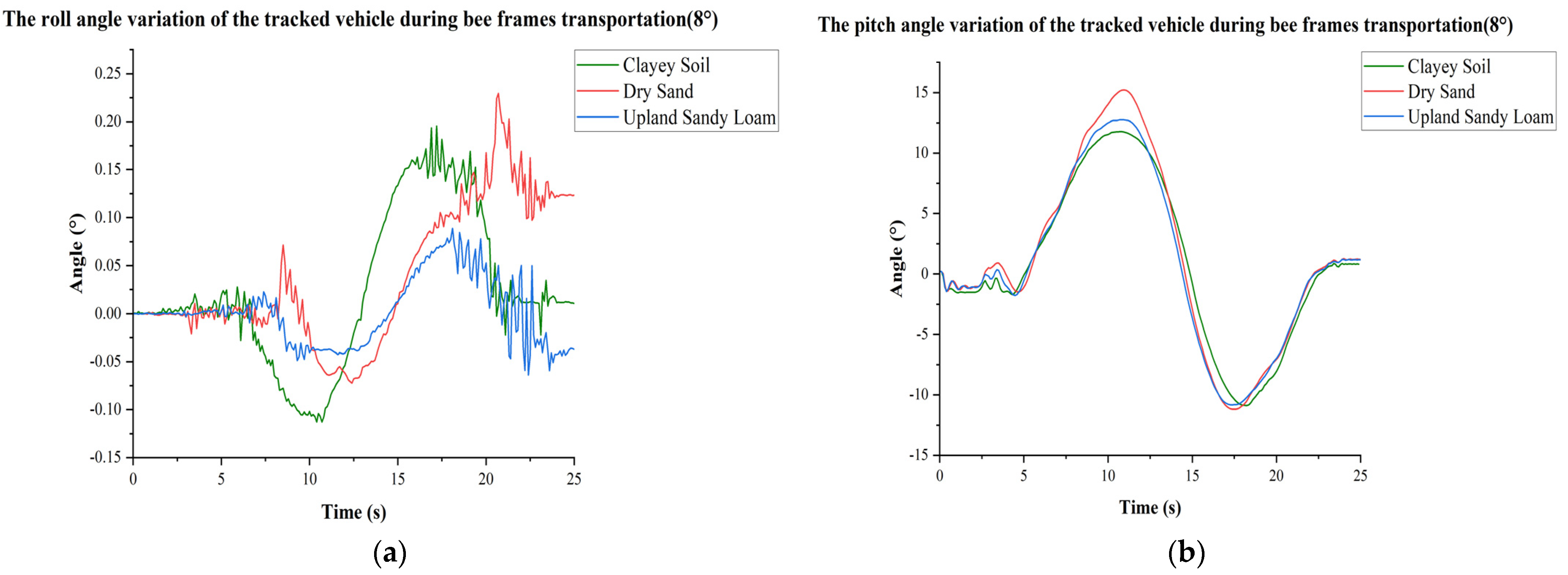
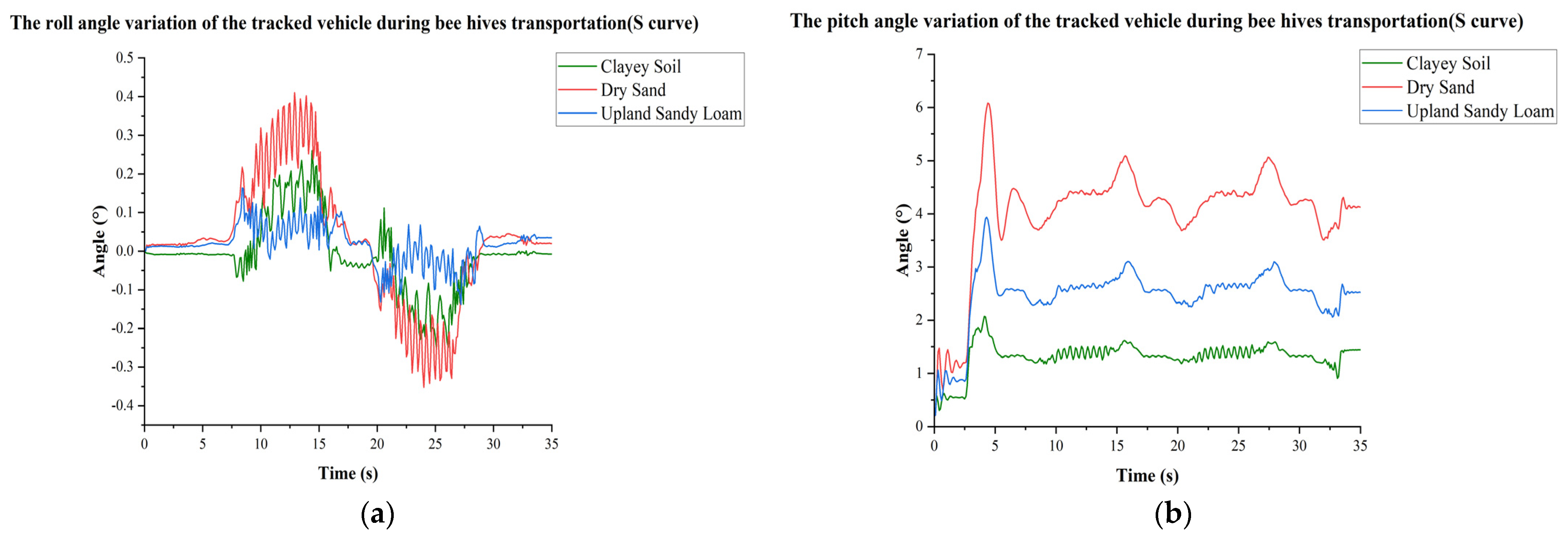
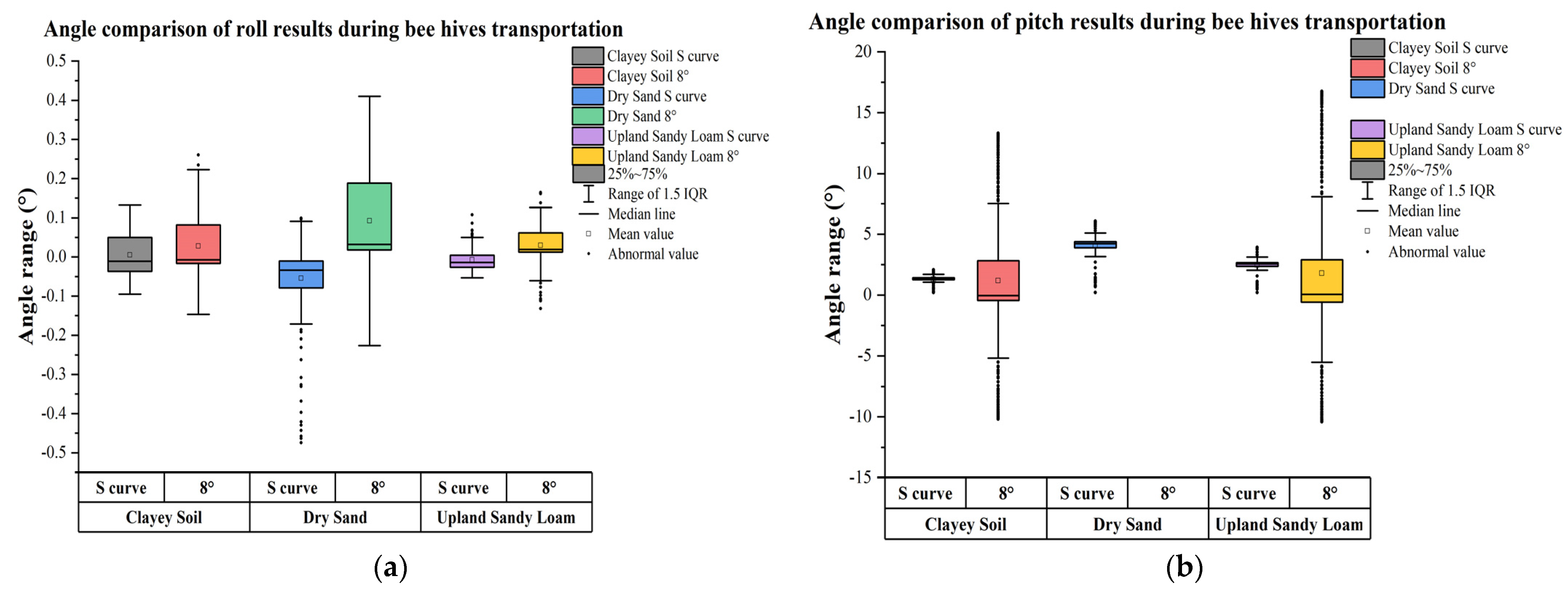
3.2.1. Results and Analysis during S-Turn Transportation
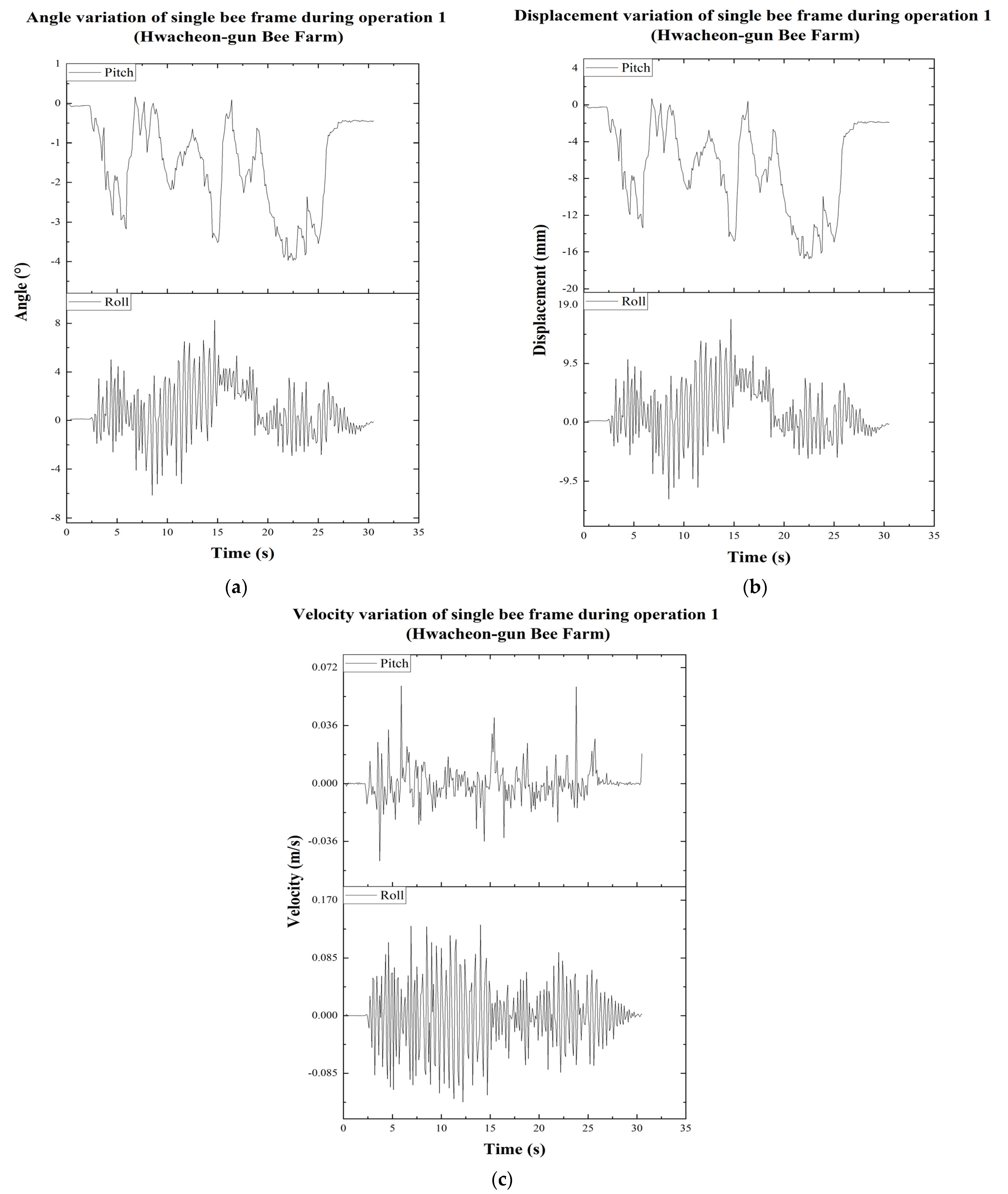
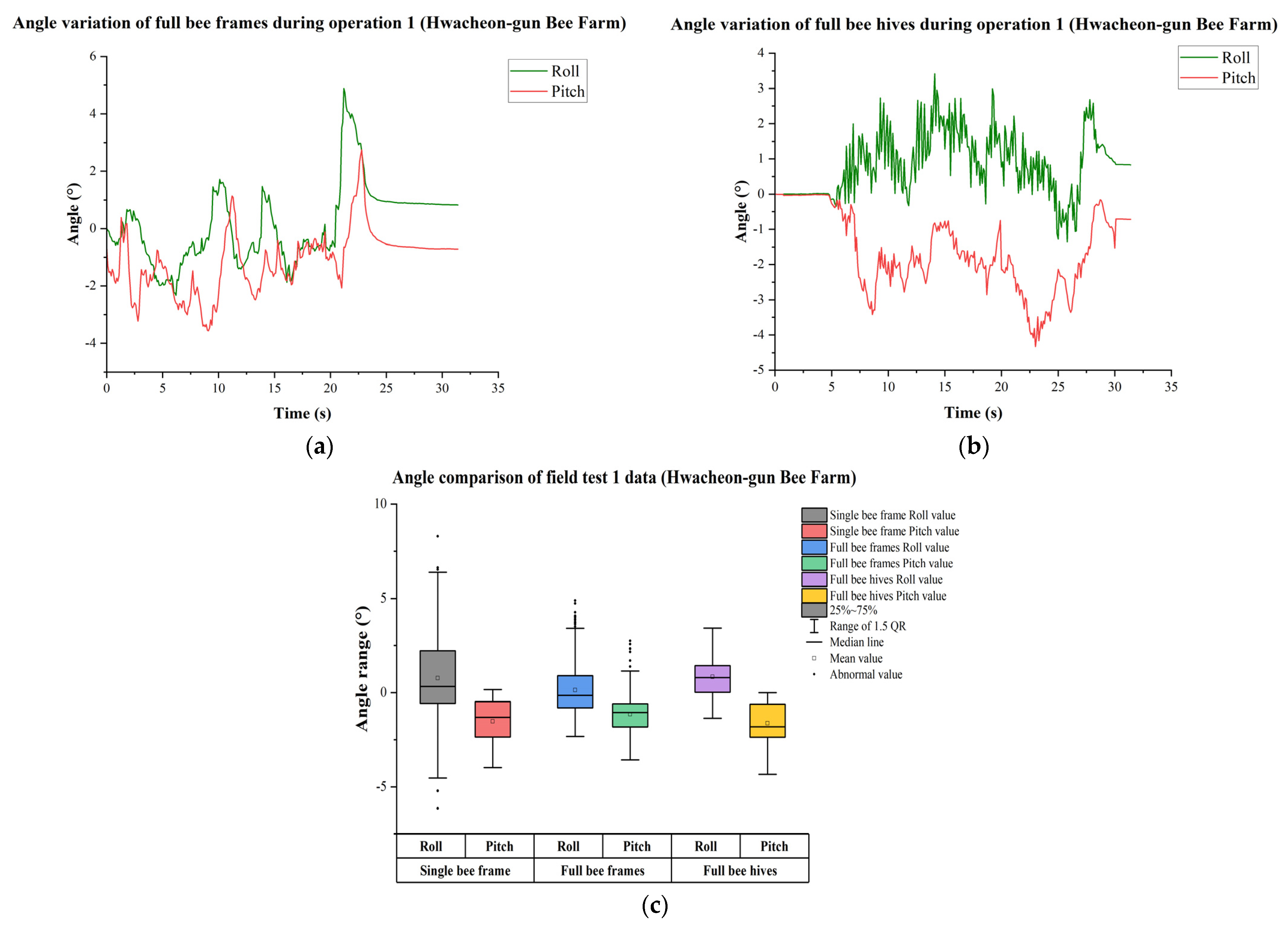
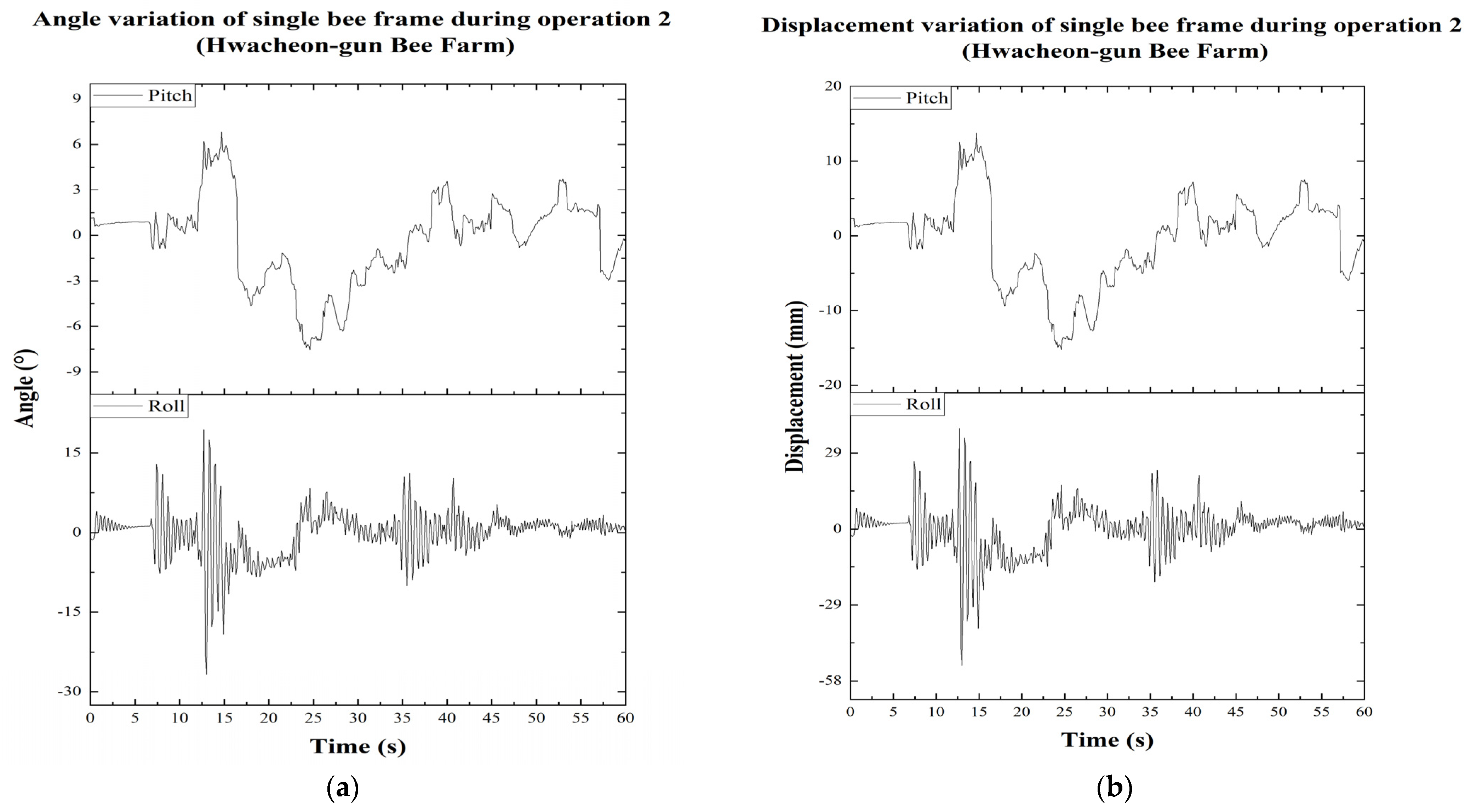
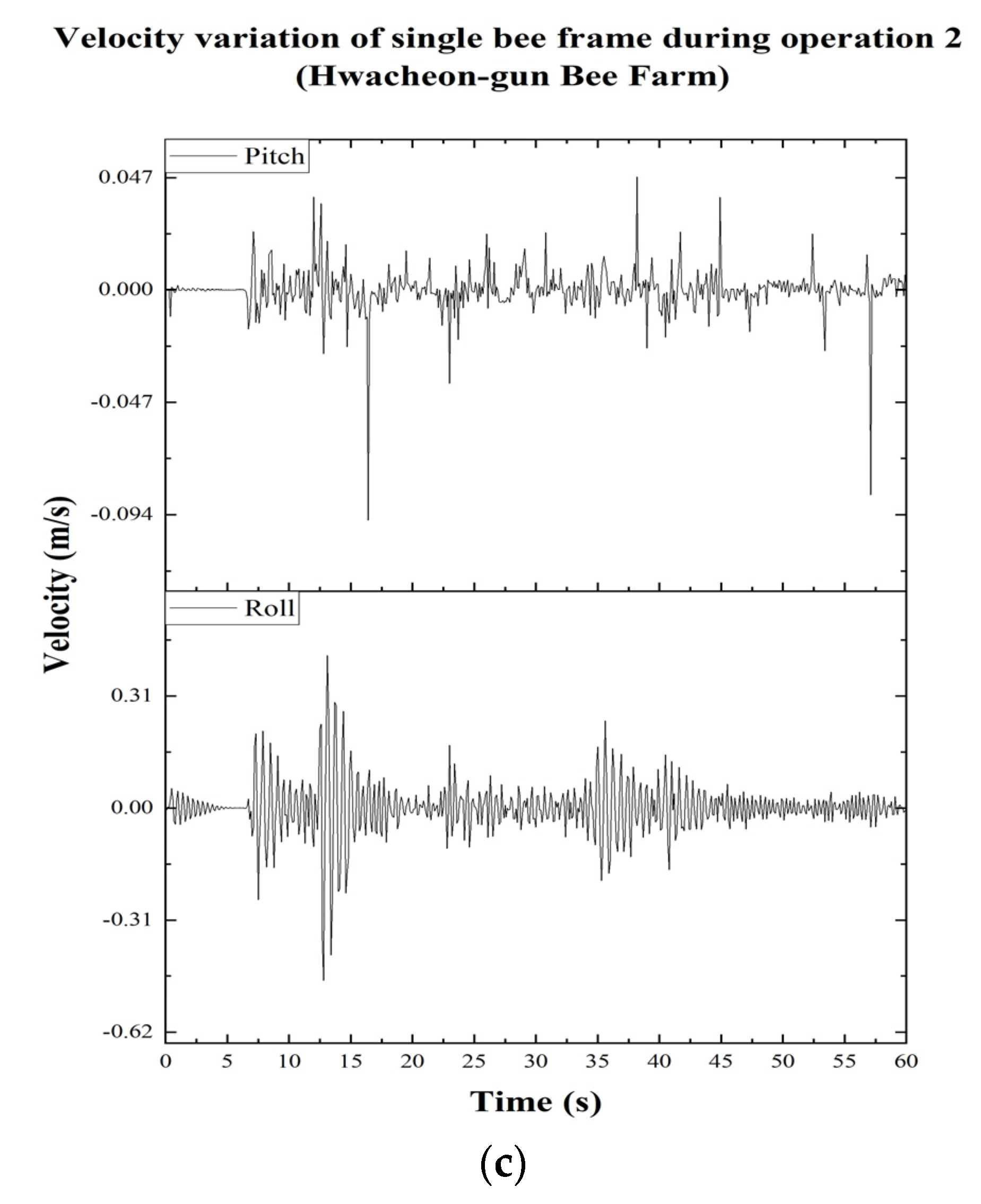
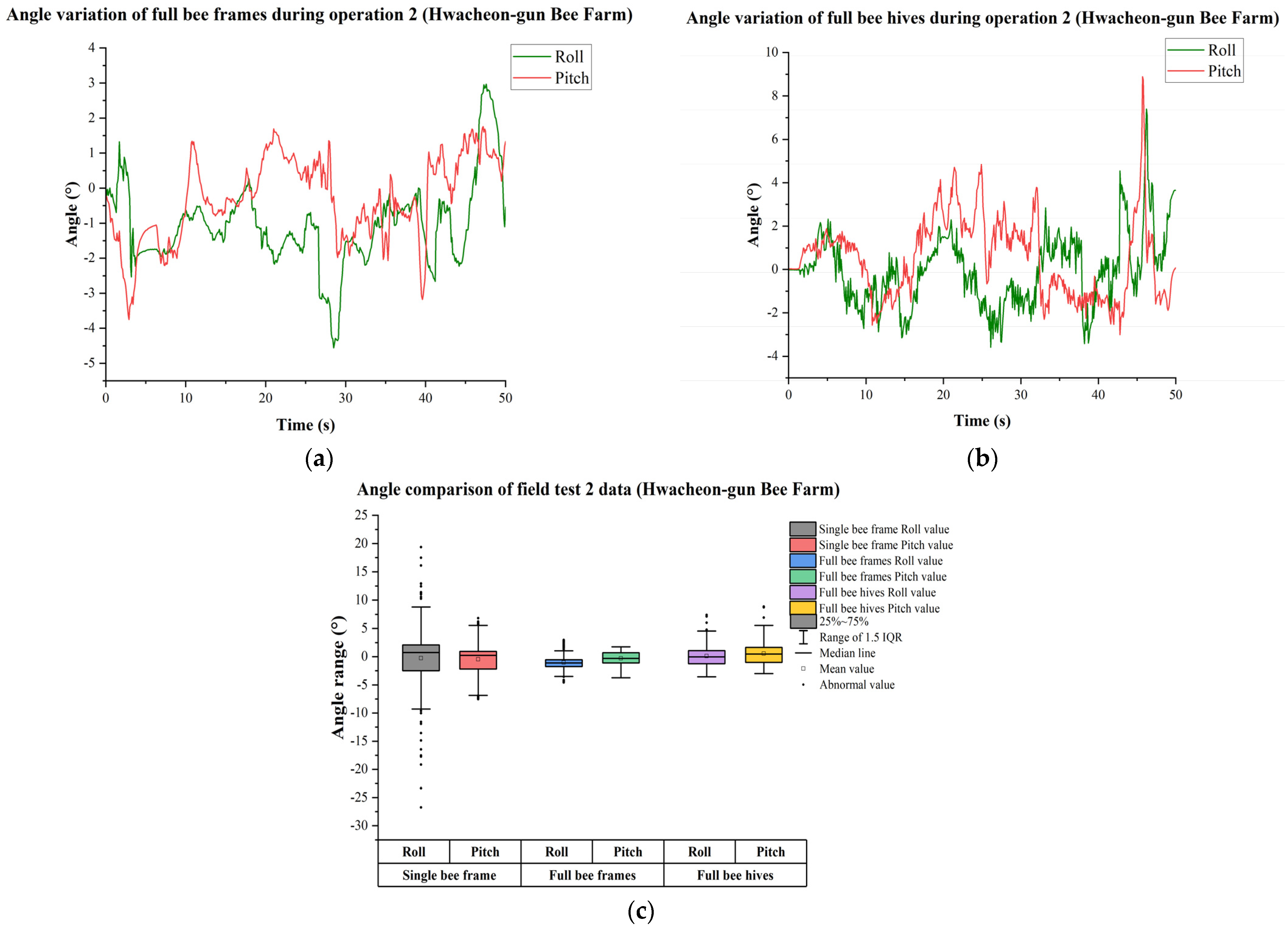
3.2.2. Results and Analysis of Transportation of Beehives from Placement to Honey Picker (Actual Transportation)
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gupta, R.K.; Reybroeck, W.; van Veen, J.W.; Gupta, A. Beekeeping for Poverty Alleviation and Livelihood Security, 1st ed.; Springer: New York, NY, USA, 2014; pp. 4–5. [Google Scholar]
- Jung, C.L. A note on the early publication of beekeeping of western honeybee, apis mellifera in Korea: Yangbong Yoji (Abriss Bienenzucht) by P. Canisius Kugelgen. J. Apic. 2014, 29, 73–77. [Google Scholar]
- Muthusamy, S.K.; Sangeetha, S.V.T.; Al Busaidi, A.S.; Al Moqbali, K.S.; Balushi, M.A.; Al Mawali, S.A. Design and Development of Drone Based Remote Controlled Honey Harvesting Machine. In Proceedings of the 2021 Fifth International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Palladam, India, 11 November 2021; pp. 1212–1217. [Google Scholar]
- Archibong, F.N.; Ugwuishiwu, B.O.; Okechukwu, M.E.; Ajah, S.A. Design, construction, and performance evaluation of a honey extracting machine. Agric. Eng. Int. CIGR J. 2021, 23, 279–289. [Google Scholar]
- Choi, H.M.; Kim, S.G.; Kim, H.Y.; Woo, S.O.; Kim, S.M.; Moon, H.J.; Han, S.M. Comparative evaluation of productivity increase through improvement of royal jelly production technique. J. Apic. 2021, 36, 221–228. [Google Scholar] [CrossRef]
- Kim, K.M.; Lee, M.Y.; Choi, Y.S.; Kang, E.J.; Park, H.G.; Park, B.S.; Frunze, O.; Kim, J.G.; Han, S.M.; Woo, S.O.; et al. Status and environmental factors of the annual production of acacia honey from the false acacia (Robinia pseudoacacia) in South Korea. J. Apic. 2021, 36, 11–16. [Google Scholar] [CrossRef]
- Jung, C.L.; Lee, M.L. Beekeeping in Korea: Past, present, and future challenges. In Asian Beekeeping in the 21st Century; Chantawannakul, P., Williams, G., Neumann, P., Eds.; Springer: Singapore, 2018; pp. 175–197. [Google Scholar]
- Yoon, H.Y. Transforming the economic value of hillside housing—A case study of Seoul, South Korea. Urban For. Urban Green. 2017, 24, 35–44. [Google Scholar] [CrossRef]
- Kim, A.S.; Kim, S.E.; Kim, G.W. Analysis of honeybee-keeping management types and skills level in Korea. J. Anim. Sci. Technol. 2011, 53, 59–66. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.Y.; Hong, I.P.; Choi, Y.S.; Kim, N.S.; Kim, H.K.; Lee, K.G.; Lee, M.L. Present status of korean beekeeping industry. Korean J. Apic. 2010, 25, 137–144. [Google Scholar]
- Kang, D.Y.; Seol, A.; Oh, J.C.; Jung, Y.K.; Han, H.; Chung, J.S. Analyzing the management characteristics of beekeeping households according to their beekeeping types. J. Apic. 2017, 32, 1–9. [Google Scholar] [CrossRef]
- Han, J.H. A study on management of apiary and main factors for developing the beekeeping industry in korea. J. Apic. 2015, 30, 127–133. [Google Scholar] [CrossRef]
- Chung, N.K.; Hwang, I.S.; Park, S.G.; Jeong, G.U. Questionary survey on the current status of honeybee-keeping and the consciousness of beekeepers in daejeon metropolitan city and jeollanamdo providence. Korean J. Apic. 2013, 26, 355–363. [Google Scholar]
- Wang, P.; Han, X.; Son, Y.; Mo, C.; Kim, D.; Kim, S.; Kim, J.; Chung, W. Development and analysis of multi-functional beekeeping loading box based on electric tracked transport vehicle. J. Biosyst. Eng. 2022, 47, 13–27. [Google Scholar] [CrossRef]
- Function Bay Technology Support Home Page. Available online: https://support.functionbay.com/en/page/single/52/recurdyn-toolkits-tracklm (accessed on 10 June 2022).
- Chen, W.; Zhan, J.M.; Zhou, H. Modeling and simulation of adaptive surface tracked vehicle based on RecurDyn. Open J. Model. Simul. 2013, 1, 37–41. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.G.; Lim, K.J.; Park, Y.S.; Heo, S.G.; Park, J.H.; Ahn, J.H.; Kim, K.S.; Choi, J.D. The effect of slope-based curve number adjustment on direct runoff estimation by L-THIA. J. Korean Soc. Water Environ. 2007, 23, 897–905. [Google Scholar]
- Zhang, X.J.; Ni, W.Q.; Jiang, Q.; Xu, L.Y.; Xu, K.K.; Yang, Y. Simulation analysis and test on stability of tracked tractor rotary tillage unit. J. Anhui Agric. Univ. 2020, 47, 324. [Google Scholar]
- Ali, M.; Lee, Y.S.; Chowdhury, M.; Khan, N.A.; Swe, K.M.; Rasool, K.; Kabir, M.S.N.; Lee, D.H.; Chung, S.O. Analysis of driving stability and vibration of a 20-kw self-propelled 1-row chinese cabbage harvester. J. Biosyst. Eng. 2021, 46, 48–59. [Google Scholar] [CrossRef]
- Liu, W.W.; Cheng, K. An analytical model for predicting ground pressure under a rigid-flexible tracked vehicle on soft ground. Math. Probl. Eng. 2020, 2020, 1–7. [Google Scholar] [CrossRef]
- Han, J.; Ren, G.; Li, D. Co-simulation of a tracked mobile robot based on RecurDyn and Simulink. In Proceedings of the 2017 5th International Conference on Frontiers of Manufacturing Science and Measuring Technology (FMSMT), Taiyuan, China, 24–25 June 2017; pp. 1170–1174. [Google Scholar]
- Ma, X.G.; Yang, T.; You, X.M.; Zhai, B. Modeling and simulation of multibody dynamics for tracked vehicle based on RecurDyn. In Proceedings of the 2010 Third International Conference on Intelligent Networks and Intelligent Systems, Fukuoka, Japan, 30 November–2 December 2010; IEEE: Washington, DC, USA, 2010; pp. 669–671. [Google Scholar]
- Chen, Y.; Cheng, Y.; Chen, J.; Zheng, Z.; Hu, C.; Cao, J. Design and experiment of the buckwheat hill-drop planter hole forming device. Agriculture 2021, 11, 1085. [Google Scholar] [CrossRef]
- Sun, S.; Wu, J.; Ren, C.; Tang, H.; Chen, J.; Ma, W.; Chu, J. Chassis trafficability simulation and experiment of a LY1352JP forest tracked vehicle. J. For. Res. 2021, 32, 1315–1325. [Google Scholar] [CrossRef]
- Al-Rajhi, M.A.; EL-Sheikha, A.M.A. Development and evaluation of a tangential honey-extractor. Misr J. Agric. Eng. 2014, 31, 1501–1522. [Google Scholar] [CrossRef]
- Wu, T.; Wu, H.; Liu, Q.; Liang, X.; Fan, Q.; Xie, C. Design and development of tracked sugarcane transporter. Sugar Tech. 2021, 23, 1137–1146. [Google Scholar] [CrossRef]
- Li, Y.; Zang, L.; Shi, T.; Lv, T.; Lin, F. Design and dynamic simulation analysis of a wheel–track composite chassis based on RecurDyn. World Electr. Veh. J. 2021, 13, 12. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, N.; Zhang, T.; Liang, J.K. Ground mechanic modeling and analysis on driving performance of tracked vehicles on the soft slope road. J. Mech. Des. 2021, 38, 9. [Google Scholar]
- Yang, H.F.; Lv, X.R. Dynamic simulation of small crawler chassis turning based on RecurDyn. Adv. Mater. Res. 2013, 774, 195–198. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Clayey Soil | Dry Sand | Upland Sandy Loam |
|---|---|---|---|
| 0.41710 | 0.00048 | 0.03740 | |
| 0.02190 | 0.00077 | 0.00100 | |
| 0.50000 | 1.10000 | 1.10000 | |
| 0.00410 | 0.00100 | 0.00330 | |
| 13.0000 | 28.0000 | 33.7000 | |
| 25.0000 | 25.0000 | 25.0000 | |
| Sinkage Ratio | 0.05000 | 0.05000 | 0.05000 |
| Steel | Aluminum | Bronze | Oak Wood | Plastic | Rubber | |
|---|---|---|---|---|---|---|
| Steel | 108,786 | 54,955 | 80,559 | 11,210 | 2636 | 25 |
| Aluminum | - | 36,763 | 46,690 | 10,182 | 2575 | 25 |
| Bronze | - | - | 63,963 | 10,819 | 2614 | 25 |
| Oak Wood | - | - | - | 5909 | 2177 | 25 |
| Plastic | - | - | - | - | 1334 | 25 |
| Rubber | - | - | - | - | - | 13 |
| Parameter | Value | Unit |
|---|---|---|
| Output Voltage | 4.2–12 (Recommended) | V |
| Operating temperature | 0–45 (Recommended), −40–85 (Max) | °C |
| Current | 100 | mA |
| Gyroscope Range | ±2000 | dps |
| Accelerometer Range | ±16 | g |
| Magnetometer Range | ±4900 | μT |
| Dimensions | 35(L) × 35(W) × 10(H) | mm |
| Simulation Results | Field Test Results (Line 1) | Field Test Results (Line 2) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| S-Turn | 8° Slope | ||||||||
| Clayey Soil | Dry Sand | Upland Sandy Loam | Clayey Soil | Dry Sand | Upland Sandy Loam | ||||
| Single frame | X-Range (mm) | −2.950~2.080 | −0.970~1.560 | −17.05~18.90 | −0.060~0.064 | −0.044~0.062 | −0.038~0.066 | −12.425~16.695 | −52.216~38.463 |
| Y-Range (mm) | −0.010~0.390 | −0.010~0.270 | −0.010~4.620 | −0.006~0.007 | −0.006~0.007 | −0.006~0.007 | −16.749~0.695 | −15.217~13.781 | |
| Z-Range (mm) | −0.750~0.120 | −0.150~0.270 | −2.320~0.030 | −1.404~0.153 | −1.573~0.362 | −1.511~0.491 | - | - | |
| Fully bee frames | Roll range (°) | −0.328~0.349 | −0.415~0.468 | −0.723~0.782 | −0.113~0.196 | −0.072~0.229 | −0.064~0.089 | −2.328~4.891 | −4.56~2.971 |
| Pitch range (°) | −0.328~0.849 | −0.195~2.243 | −0.160~1.384 | −10.883~11.777 | −11.188~15.219 | −10.835~12.756 | −3.561~2.749 | −3.756~1.76 | |
| Fully beehives | Roll range (°) | −0.095~0.132 | −0.474~0.099 | −0.053~0.108 | −0.147~0.261 | - | −0.132~0.164 | −1.362~3.419 | −3.594~7.388 |
| Pitch range (°) | 0.200~2.073 | 0.200~6.085 | 0.200~3.935 | −10.207~13.314 | - | −10.422~16.758 | −4.332~−0.002 | −3.011~8.888 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Mo, C.; Kim, S.; Han, X. Dynamics Simulation and Field Test Verification of Multi-Functional Beekeeping Loading Box Based on the Tracked Vehicle. Appl. Sci. 2022, 12, 6667. https://doi.org/10.3390/app12136667
Wang P, Mo C, Kim S, Han X. Dynamics Simulation and Field Test Verification of Multi-Functional Beekeeping Loading Box Based on the Tracked Vehicle. Applied Sciences. 2022; 12(13):6667. https://doi.org/10.3390/app12136667
Chicago/Turabian StyleWang, Pingan, Changyeun Mo, Subae Kim, and Xiongzhe Han. 2022. "Dynamics Simulation and Field Test Verification of Multi-Functional Beekeeping Loading Box Based on the Tracked Vehicle" Applied Sciences 12, no. 13: 6667. https://doi.org/10.3390/app12136667
APA StyleWang, P., Mo, C., Kim, S., & Han, X. (2022). Dynamics Simulation and Field Test Verification of Multi-Functional Beekeeping Loading Box Based on the Tracked Vehicle. Applied Sciences, 12(13), 6667. https://doi.org/10.3390/app12136667