
The Relationships of Human-Cobot Interaction Fluency with Job Performance and Job Satisfaction among Cobot Operators—The Moderating Role of Workload


Abstract
1. Introduction
2. Theoretical Background
2.1. Human–Robot Interaction Fluency
2.2. Job Satisfaction
2.3. Job Performance
2.4. Workload
3. The Study Aims and Hypotheses
4. Materials and Methods
4.1. Participants and Procedure
4.2. Measures
5. Results
5.1. Descriptive Statistics
5.2. Correlation and Regression Analyses
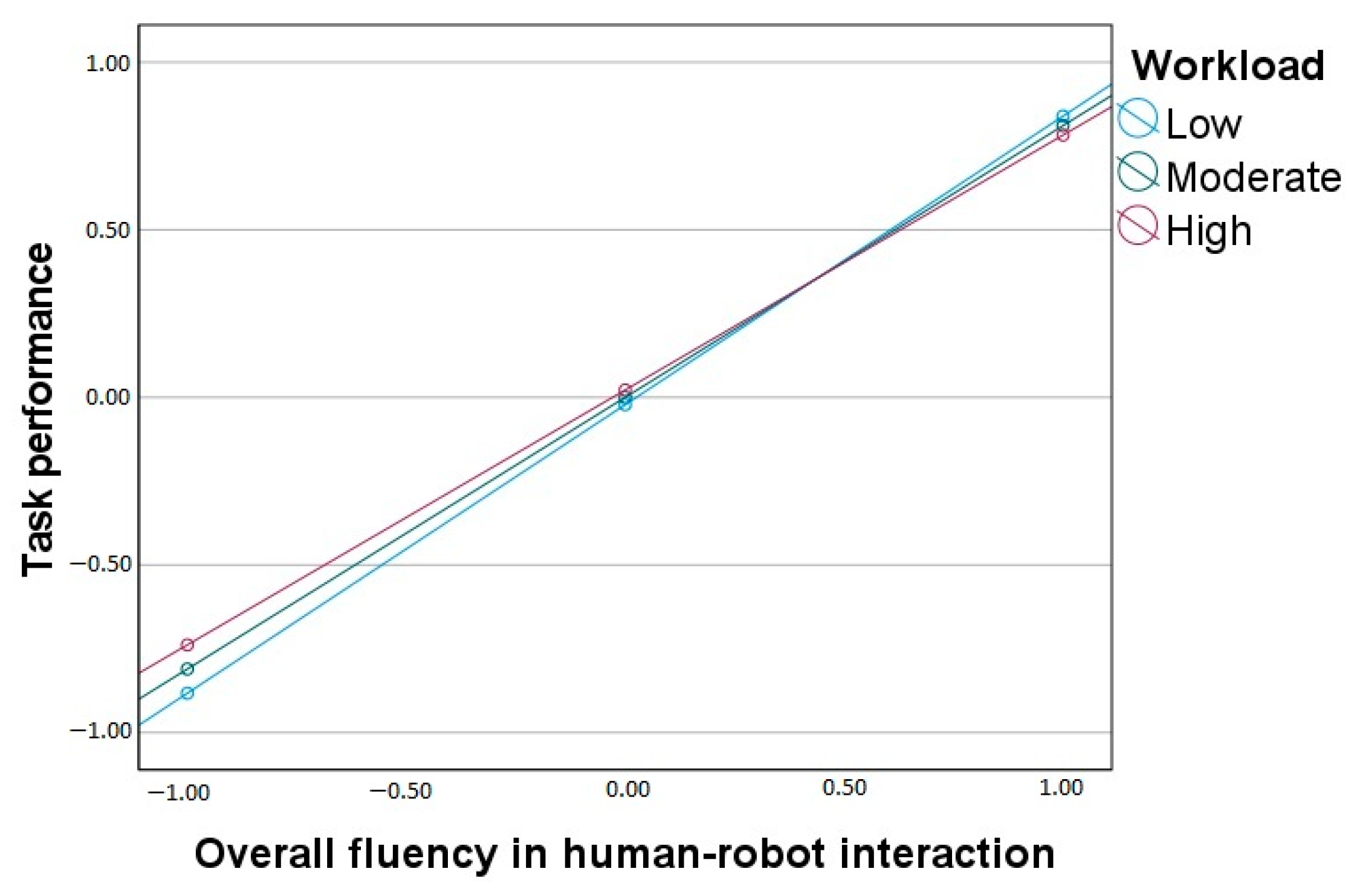
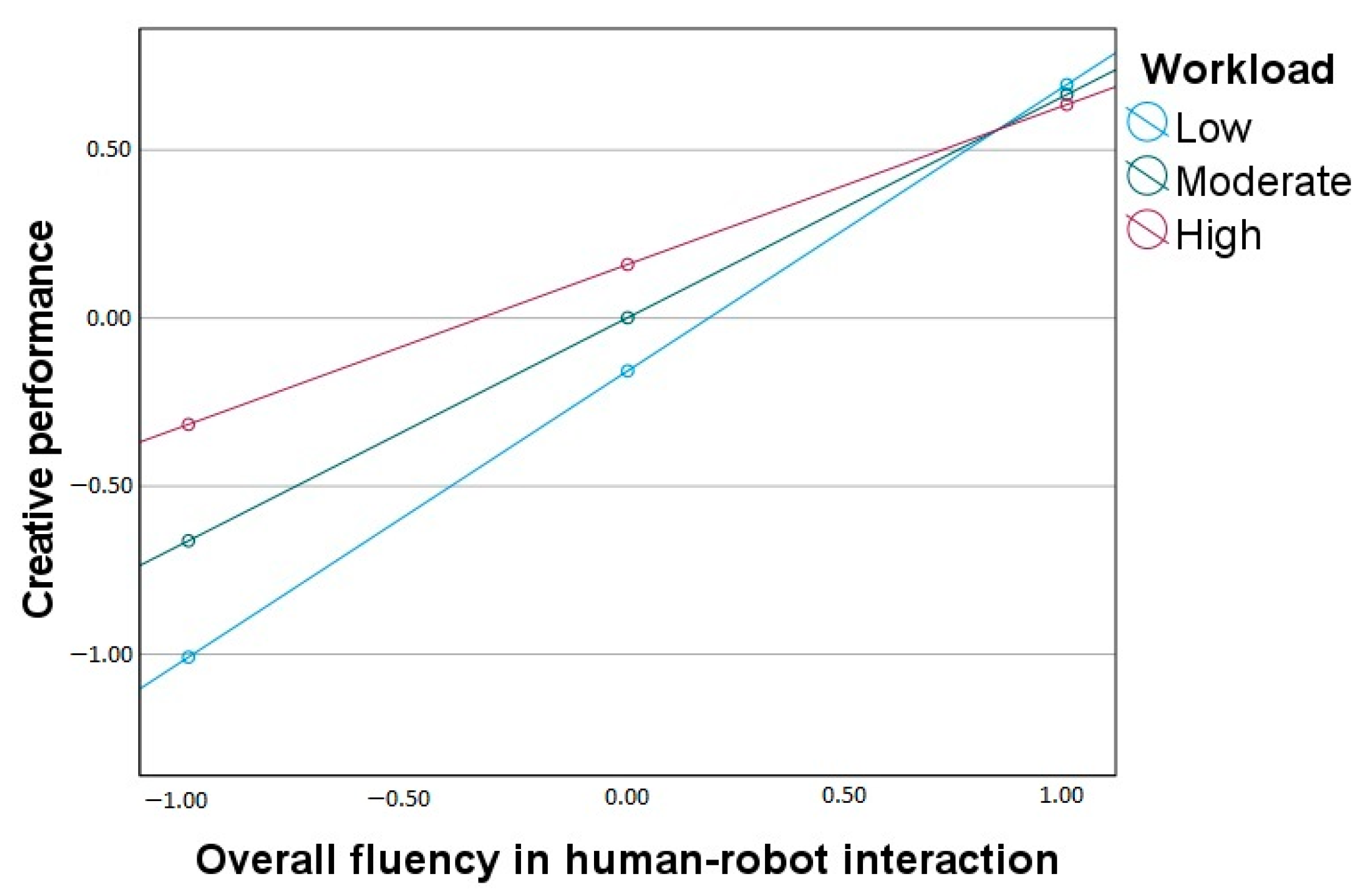
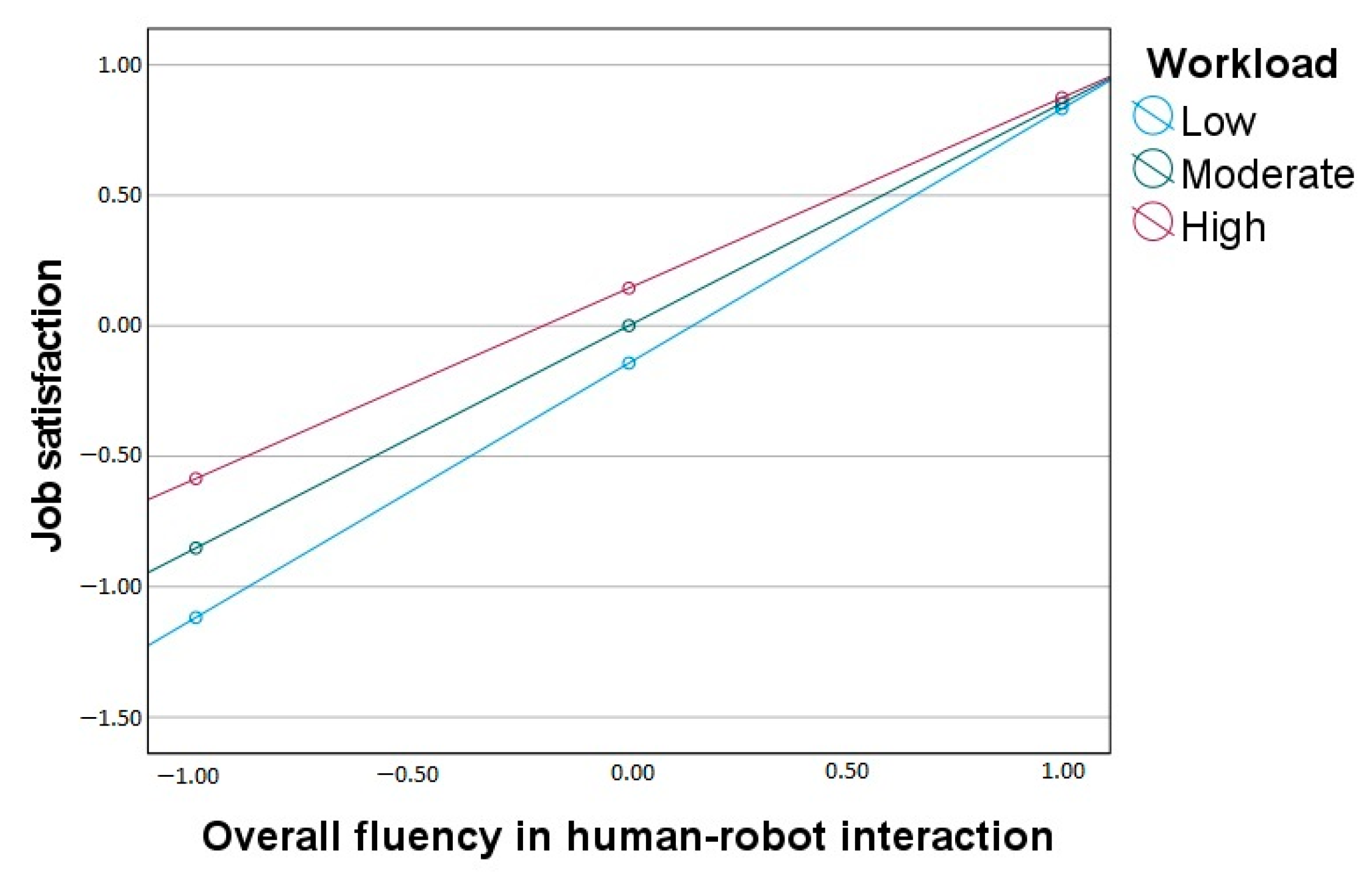
5.3. Moderation Analysis
6. Discussion
Strengths and Limitations of the Study
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chacón, A.; Ponsa, P.; Angulo, C. Cognitive Interaction Analysis in Human–Robot Collaboration Using an Assembly Task. Electronics 2021, 10, 1317. [Google Scholar] [CrossRef]
- Chromjakova, F.; Trentesaux, D.; Kwarteng, M.A. Human and Cobot Cooperation Ethics: The Process Management Concept of the Production Workplace. J. Compet. 2021, 13, 21–38. [Google Scholar] [CrossRef]
- Evjemo, L.D.; Gjerstad, T.; Grøtli, E.I.; Sziebig, G. Trends in smart manufacturing. Role of humans and industrial robots in smart factories. Curr. Robot. Rep. 2020, 1, 35–41. [Google Scholar] [CrossRef]
- Di Pasquale, V.; De Simone, V.; Salvatore, M.; Riemma, S. Smart operators: How Industry 4.0 is affecting the worker’s performance in manufacturing contexts. Procedia Comput. Sci. 2021, 180, 958–967. [Google Scholar] [CrossRef]
- Meindl, B.; Ayala, N.F.; Mendonça, J.; Frank, A.G. The four smarts of Industry 4.0: Evolution of ten years of research and future perspectives. Technol. Forecast. Soc. Chang. 2021, 168, 120784. [Google Scholar] [CrossRef]
- Romero, D.; Noran, O.; Stahre, J.; Bernus, P.; Fast-Berglund, Å. Towards a Human-Centred Reference Architecture for Next Generation Balanced Automation Systems: Human-Automation Symbiosis. In Advances in Production Management Systems: Innovative Production Management Towards Sustainable Growth; Umeda, S., Nakano, M., Mizuyama, H., Hibino, H., Kiritsis, D., von Cieminski, G., Eds.; Springer: Cham, Switzerland, 2015; Volume 460, pp. 556–566. [Google Scholar] [CrossRef]
- De Simone, V.; Di Pasquale, V.; Giubileo, V.; Miranda, S. Human-Robot Collaboration: An analysis of worker’s performance. Procedia Comput. Sci. 2022, 200, 1540–1549. [Google Scholar] [CrossRef]
- Bi, Z.M.; Luo, C.; Miao, Z.; Zhang, B.; Zhang, W.J.; Wang, L. Safety assurance mechanisms of collaborative robotic systems in manufacturing. Robot. Comput. Integr. Manuf. 2021, 67, 102022. [Google Scholar] [CrossRef]
- Di Pasquale, V.; De Simone, V.; Giubileo, V.; Miranda, S. A taxonomy of factors influencing worker’s performance in human–robot collaboration. IET Collab. Intell. Manuf. 2022, 5, e12069. [Google Scholar] [CrossRef]
- Borges, G.D.; Reis, A.M.; Neto, R.A.; de Mattos, D.L.; Cardoso, A.; Gonçalves, H.; Merino, E.; Colim, A.; Carneiro, P.; Arezes, P. Decision-Making Framework for Implementing Safer Human-Robot Collaboration Workstations: System Dynamics Modeling. Safety 2021, 7, 75. [Google Scholar] [CrossRef]
- Hopko, S.; Wang, J.; Mehta, R. Human Factors Considerations and Metrics in Shared Space Human-Robot Collaboration: A Systematic Review. Front. Robot. AI 2022, 9, 799522. [Google Scholar] [CrossRef]
- Yan, Y.; Jia, Y. A Review on Human Comfort Factors, Measurements, and Improvements in Human–Robot Collaboration. Sensors 2022, 22, 7431. [Google Scholar] [CrossRef]
- Gervasi, R.; Mastrogiacomo, L.; Franceschini, F. A conceptual framework to evaluate human-robot collaboration. Int. J. Adv. Manuf. Technol. 2020, 108, 841–865. [Google Scholar] [CrossRef]
- Colim, A.; Faria, C.; Cunha, J.; Oliveira, J.; Sousa, N.; Rocha, L.A. Physical Ergonomic Improvement and Safe Design of an Assembly Workstation through Collaborative Robotics. Safety 2021, 7, 14. [Google Scholar] [CrossRef]
- Chowdhury, A.; Ahtinen, A.; Pieters, R.; Väänänen, K. User Experience Goals for Designing Industrial Human-Cobot Collaboration: A Case Study of Franka Panda Robot. In Proceedings of the 11th Nordic Conference on Human-Computer Interaction: Shaping Experiences, Shaping Society (NordiCHI ’20), Tallin, Estonia, 25–29 October 2020; Association for Computing Machinery: New York, NY, USA, 2020; Volume 83, pp. 1–13. [Google Scholar] [CrossRef]
- Gihleb, R.; Giuntella, O.; Stella, L.; Wang, T. Industrial robots, Workers’ safety, and health. Labour Econ. 2022, 78, 102205. [Google Scholar] [CrossRef]
- Bergman, M.; de Joode, E.; de Geus, M.; Sturm, J. Human-cobot teams: Exploring design principles and behaviour models to facilitate the understanding of non-verbal communication from cobots. In Proceedings of the 3rd International Conference on Computer-Human Interaction Research and Applications (CHIRA’19), Vienna, Austria, 20–21 September 2019; SCITEPRESS—Science and Technology Publications: Setúbal, Portugal; Lda: Porto, Portugal, 2019; pp. 191–198. [Google Scholar] [CrossRef]
- Bettoni, A.; Montini, E.; Righi, M.; Villani, V.; Tsvetanov, R.; Borgia, S.; Secchi, C.; Carpanzano, E. Mutualistic and Adaptive Human-Machine Collaboration Based on Machine Learning in an Injection Moulding Manufacturing Line. Procedia CIRP 2020, 93, 395–400. [Google Scholar] [CrossRef]
- Baumgartner, M.; Kopp, T.; Kinkel, S. Analysing Factory Workers’ Acceptance of Collaborative Robots: A Web-Based Tool for Company Representatives. Electronics 2022, 11, 145. [Google Scholar] [CrossRef]
- Hancock, P.A.; Billings, D.R.; Schaefer, K.E.; Chen, J.Y.; Visser, E.D.; Parasuraman, R. Meta-analysis of factors affecting trust in human-robot interaction. Hum. Factors 2011, 16, 517–527. [Google Scholar] [CrossRef]
- Cardoso, A.; Colim, A.; Bicho, E.; Braga, A.C.; Menozzi, M.; Arezes, P. Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review. Safety 2021, 7, 71. [Google Scholar] [CrossRef]
- Storm, F.A.; Chiappini, M.; Dei, C.; Piazza, C.; André, E.; Reißner, N.; Brdar, I.; Delle Fave, A.; Gebhard, P.; Malosio, M.; et al. Physical and mental well-being of cobot workers: A scoping review using the Software-Hardware-Environment-Liveware-Liveware-Organization model. Hum. Factor Ergon. Man. 2022, 32, 419–435. [Google Scholar] [CrossRef]
- Pollak, A.; Paliga, M.; Pulopulos, M.M.; Kożusznik, B.; Kożusznik, M.W. Stress in manual and autonomous modes of collaboration with a cobot. Comput. Hum. Behav. 2020, 112, 106469. [Google Scholar] [CrossRef]
- Faccio, M.; Granata, I.; Menini, A.; Milanese, M.; Rossato, C.; Bottin, M.; Minto, R.; Pluchino, P.; Gamberini, L.; Boschetti, G.; et al. Human factors in cobot era: A review of modern production systems features. J. Intell. Manuf. 2022, 34, 85–106. [Google Scholar] [CrossRef]
- Kulic, D.; Croft, E.A. Anxiety detection during human-robot interaction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 616–621. [Google Scholar]
- Kinzel, H. Industry 4.0–where does this leave the human factor? J. Urban Cult. Res. 2017, 15, 70–83. [Google Scholar] [CrossRef]
- Wall, T.; Corbett, J.M.; Clegg, C.; Jackson, P.; Martin, R. Advanced manufacturing technology and work design: Towards a theoretical framework. J. Organ. Behav. 1990, 11, 201–219. [Google Scholar] [CrossRef]
- Mühlemeyer, C. Assessment and Design of Employees-Cobot-Interaction. In Human Interaction and Emerging Technologies; Ahram, T., Taiar, R., Colson, S., Choplin, A., Eds.; Springer: Cham, Switzerland, 2020; Volume 1018, p. 771776. [Google Scholar] [CrossRef]
- Rubio, S.; Díaz, E.; Martín, J.; Puente, J.M. Evaluation of Subjective Mental Workload: A Comparison of SWAT, NASA-TLX, and Workload Profile Methods. Appl. Psychol. 2004, 53, 61–86. [Google Scholar] [CrossRef]
- Hoffman, G. Evaluating fluency in human-robot collaboration. IEEE Trans. Hum. Mach. Syst. 2019, 49, 209–218. [Google Scholar] [CrossRef]
- Paliga, M.; Pollak, A. Development and validation of the fluency in human–robot interaction scale. a two-wave study on three perspectives of fluency. Int. J. Hum. Comput. Stud. 2021, 155, 102698. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Effects of anticipatory perceptual simulation on practiced human–robot tasks. Auton. Robot. 2009, 28, 403–423. [Google Scholar] [CrossRef]
- Isaacson, S.; Rice, G.; Boerkoel, J.C. MAD-TN: A tool for measuring fluency in human-robot collaboration. arXiv 2019, arXiv:1909.06675. [Google Scholar]
- Christoffersen, K.; Woods, D.D. How to make automated systems team players. In Advances in Human Performance and Cognitive Engineering Research; Salas, E., Ed.; Emerald Group Publishing Limited: Bingley, UK, 2002; Volume 2, pp. 1–12. [Google Scholar]
- Kopp, T.; Baumgartner, M.; Kinkel, S. Success factors for introducing industrial human–robot interaction in practice: An empirically driven framework. Int. J. Adv. Manuf. Technol. 2021, 112, 685–704. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Cost-based anticipatory action selection for human-robot fluency. IEEE Trans. Robot. 2007, 23, 952–961. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Effects of anticipatory action on human–robot teamwork efficiency, fluency, and perception of team. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction—HRI’07, Arlington, VA, USA, 10 March 2007; pp. 1–8. [Google Scholar] [CrossRef]
- You, S.; Robert, L. Teaming up with robots: An IMOI (Inputs-Mediators-Outputs-Inputs) framework of human-robot teamwork. Int. J. Robot. Eng. 2017, 1, 1–7. [Google Scholar] [CrossRef]
- Steinfeld, A.; Fong, T.; Kaber, D.; Lewis, M.; Scholtz, J.; Schultz, A.; Goodrich, M. Common metrics for human-robot interaction. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; ACM: New York, NY, USA, 2006; pp. 33–40. [Google Scholar] [CrossRef]
- Paliga, M. Human–cobot interaction fluency and cobot operators’ job performance. The mediating role of work engagement: A survey. Auton. Robot. 2022, 155, 403–423. [Google Scholar] [CrossRef]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human–robot interaction in industrial collaborative robotics: A literature review of the decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Sauppé, A.; Mutlu, B. The social impact of a robot co-worker in industrial settings. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18 April 2015; pp. 3613–3622. [Google Scholar]
- Beer, J.M.; Liles, K.R.; Wu, X.; Pakala, S.B. Affective Human–Robot Interaction. In Emotions and Affect in Human Factors and Human-Computer Interaction; Jeon, M., Ed.; Academic Press: Cambridge, MA, USA, 2017; pp. 359–381. [Google Scholar] [CrossRef]
- Broadbent, E. Interactions with robots: The truths we reveal about ourselves. Annu. Rev. Psychol. 2017, 3, 627–652. [Google Scholar] [CrossRef] [PubMed]
- Savur, C.; Kumar, S.; Sahin, F. A framework for monitoring human physiological response during human robot collaborative task. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; IEEE: Piscataway, NJ, USA; pp. 385–390. [Google Scholar]
- Charalambous, G.; Fletcher, S.; Webb, P. The Development of a Scale to Evaluate Trust in Industrial Human-robot Collaboration. Int. J. Soc. Robot. 2016, 8, 193–209. [Google Scholar] [CrossRef]
- Schou, C.; Andersen, R.S.; Chrysostomou, D.; Bøgh, S.; Madsen, O. Skill-based instruction of collaborative robots in industrial settings. Robot. Comput. Integr. Manuf. 2018, 53, 72–80. [Google Scholar] [CrossRef]
- Bauer, A.; Wollherr, D.; Buss, M. Human-robot collaboration: A survey. Int. J. Humanoid. Robot 2008, 5, 47–66. [Google Scholar] [CrossRef]
- Ji, H.; Yan, J. How team structure can enhance performance: Team longevity’s moderating effect and team coordination’s mediating effect. Front. Psychol. 2020, 11, 1–11. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Collision-free human–robot collaboration based on context awareness. Robot. Comput. Integr. Manuf. 2021, 67, 101997. [Google Scholar] [CrossRef]
- Judge, T.A.; Klinger, R. Job satisfaction: Subjective well-beingat work. In The Science of Subjective Well-Being; Eid, M., Larsen, R.J., Eds.; Guilford Press: New York, NY, USA, 2008; pp. 393–413. [Google Scholar]
- Schwabe, H.; Castellacci, F. Automation, workers’ skills and job satisfaction. PLoS ONE 2020, 15, e0242929. [Google Scholar] [CrossRef]
- Hulin, C.; Judge, T. Job attitudes. In Handbook of Psychology: Industrial and Organizational Psychology; Borman, W., Ilgen, D., Klimoski, R., Eds.; Wiley: Hoboken, NJ, USA, 2003; pp. 255–276. [Google Scholar]
- Paliga, M. Satysfakcja z Pracy i Wydajność Pracowników. Relacja (Nie)Oczekiwana) [Job Satisfaction and Job Performance. The (Un)Expected Relationship]; Wydawnictwo Uniwersytetu Śląskiego: Katowice, Poland, 2021. [Google Scholar] [CrossRef]
- Paliga, M.; Kożusznik, B.; Pollak, A.; Sanecka, E. The relationships of psychological capital and influence regulation with job satisfaction and job performance. PLoS ONE 2022, 17, e0272412. [Google Scholar] [CrossRef] [PubMed]
- Judge, T.A.; Weiss, H.M.; Kammeyer-Mueller, J.D.; Hulin, C.L. Job attitudes, job satisfaction, and job affect: A century of continuity and of change. J. Appl. Psychol. 2017, 102, 356–374. [Google Scholar] [CrossRef]
- Mattsson, S.; Fast-Berglund, Å.; Thorvald, P. A relationship between operator performance and arousal in assembly. Procedia CIRP 2016, 44, 32–37. [Google Scholar] [CrossRef]
- Gorny, P.M.; Woodard, R.C. Don’t Fear the Robots: Automatability and Job Satisfaction. MPRA Pap. 2020, 103424. Available online: https://ideas.repec.org/p/pra/mprapa/103424.html (accessed on 15 December 2022).
- Stein, J.; Liebold, B.; Ohler, P. Stay back, clever thing! Linking situational control and human uniqueness concerns to the aversion against autonomous technology. Comput. Hum. Behav. 2019, 95, 73–82. [Google Scholar] [CrossRef]
- Złotowski, J.; Yogeeswaran, K.; Bartneck, C. Can we control it? Autonomous robots threaten human identity, uniqueness, safety, and resources. Int. J. Hum. Comput. Stud. 2017, 100, 48–54. [Google Scholar] [CrossRef]
- Gombolay, M.C.; Shah, J.A. Challenges in collaborative scheduling of human-robot teams. In Proceedings of the 2014 AAAI Fall Symposium Series on AI-HRI, Arlington, VA, USA, 13–15 November 2014; Association for the Advancement of Artificial Intelligence: Washington DC, USA, 2014; pp. 1–3. Available online: https://www.aaai.org/ocs/index.php/FSS/FSS14/paper/viewFile/9124/9148 (accessed on 15 December 2022).
- Rossato, C.; Pluchino, P.; Cellini, N.; Jacucci, G.; Spagnolli, A.; Gamberini, L. Facing with collaborative robots: The subjective experience in senior and younger workers. Cyberpsychol. Behav. Soc. Netw. 2021, 24, 349–356. [Google Scholar] [CrossRef]
- Viswesvaran, C.; Ones, D.S. Perspectives on models of job performance. Int. J. Sel. Assess. 2000, 8, 216–226. [Google Scholar] [CrossRef]
- Campbell, J.P. Modeling the performance prediction problem in industrial and organizational psychology. In Handbook of Industrial and Organizational Psychology. Volume 1; Dunnette, M., Hough, L.M., Eds.; Consulting Psychologists Press: Palo Alto, CA, USA, 1990; pp. 687–731. [Google Scholar]
- Campbell, J.P.; McCloy, R.A.; Oppler, S.H.; Sager, C.E. A theory of performance. In Personnel Selection in Organizations; Schmitt, N., Borman, W.C., Eds.; Jossey Bass: San Francisco, CA, USA, 1993; pp. 35–70. [Google Scholar]
- Sonnentag, S.; Frese, M. Performance Concepts and Performance Theory. In Psychological Management of Individual Performance; Sonnentag, S., Ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2005; pp. 3–25. [Google Scholar]
- Koopmans, L.; Bernaards, C.M.; Hildebrandt, V.H.; Schaufeli, W.B.; de Vet, H.C.W.; van der Beek, A.J. Conceptual frameworks of individual work performance: A systematic review. J. Occup. Environ. Med. 2011, 53, 856–866. [Google Scholar] [CrossRef]
- Campbell, J.P. Behavior, Performance, and Effectiveness in the Twenty-first Century. In The Oxford Handbook of Organizational Psychology. Volume 1; Kozlowski, S., Ed.; Oxford University Press: New York, NY, USA, 2012; pp. 159–196. [Google Scholar]
- Borman, W.C.; Motowidlo, S.J. Expanding the criterion domain to include elements of contextual performance. In Personnel Selection in Organizations; Schmitt, N., Borman, W.C., Eds.; Jossey Bass: San Francisco, CA, USA, 1993; pp. 71–98. [Google Scholar]
- Goodman, S.A.; Svyantek, D.J. Person–Organization Fit and Contextual Performance: Do Shared Values Matter. J. Vocat. Behav. 1999, 55, 254–275. [Google Scholar] [CrossRef]
- Poropat, A. New Models of Work Performance and Their Implications for Employment Relations. In Proceedings of the Tenth Annual Conference of the International Employment Relations Association, Sydney, Australia, 6–9 July 2002. [Google Scholar]
- Podsakoff, P.M.; MacKenzie, S.B.; Paine, J.B.; Bachrach, D.G. Organizational Citizenship Behaviors: A Critical Review of the Theoretical and Empirical Literature and Suggestions for Future Research. J. Manag. 2000, 26, 513–563. [Google Scholar] [CrossRef]
- Organ, D.W. Organizational Citizenship Behavior; D.C. Heath: Lexington, MA, USA, 1988. [Google Scholar]
- Borman, W.C.; Penner, L.A.; Allen, T.D.; Motowidlo, S.J. Personality predictors of citizenship performance. Int. J. Sel. Assess. 2001, 9, 52–69. [Google Scholar] [CrossRef]
- Oldham, G.R.; Cummings, A. Employee creativity: Personal and Contextual Factors at Work. Acad. Manag. J. 1996, 39, 607–634. [Google Scholar] [CrossRef]
- Woodman, R.W.; Sawyer, J.E.; Griffin, R.W. Toward a theory of organizational creativity. Acad. Manag. Rev. 1993, 18, 293–321. [Google Scholar] [CrossRef]
- Eisenberger, R.; Armeli, S. Can Salient Reward Increase Creative Performance Without Reducing Intrinsic Creative Interest? J. Pers. Soc. Psychol. 1997, 72, 652–663. [Google Scholar] [CrossRef]
- Unsworth, K.L.; Wall, T.D.; Carter, A. Creative requirement: A neglected construct in the study of employee creativity? Group Organ. Manag. 2005, 30, 541–560. [Google Scholar] [CrossRef]
- Chao, C.; Thomaz, A. Timing in multimodal turn-taking interactions: Control and analysis using timed Petri nets. J. Hum. Robot. Interact. 2012, 1, 4–25. [Google Scholar] [CrossRef]
- Spector, P.E.; Jex, S.M. Development of four self-report measures of job stressors and strain: Interpersonal Conflict at Work Scale, Organizational Constraints Scale, Quantitative Workload Inventory, and Physical Symptoms Inventory. J. Occup. Health Psychol. 1998, 3, 356–367. [Google Scholar] [CrossRef]
- Baka, Ł.; Bazińska, R. Polish adaptation of three self-report measures of job stressors: The Interpersonal Conflict at Work Scale, the Quantitative Workload Inventory and the Organizational Constraints Scale. Int. J. Occup. Saf. Ergon. 2016, 22, 32–39. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Fan, J.; Fu, Y.; Liu, F. Intrinsic motivation as a mediator of the relationship between organizational support and quantitative workload and work-related fatigue. Hum. Factors Manuf. 2018, 28, 154–162. [Google Scholar] [CrossRef]
- van Veldhoven, M. Quantitative job demands. In An Introduction to Contemporary Work Psychology; Peeters, M.C.W., De Jonge, J., Taris, T.W., Eds.; Wiley Blackwell: Hoboken, NJ, USA, 2013; pp. 117–143. [Google Scholar]
- Konze, A.K.; Rivkin, W.; Schmidt, K.H. Is Job Control a Double-Edged Sword? A Cross-Lagged Panel Study on the Interplay of Quantitative Workload, Emotional Dissonance, and Job Control on Emotional Exhaustion. Int. J. Environ. Res. Public Health 2017, 14, 1608. [Google Scholar] [CrossRef]
- Hauck, E.L.; Snyder, L.A.; Cox-Fuenzalida, L.-E. Workload variability and social support: Effects on stress and performance. Curr. Psychol. 2008, 27, 112–125. [Google Scholar] [CrossRef]
- Karasek, R. Job demands, job decision latitude, and mental strain: Implications for job redesign. Adm. Sci. Q. 1979, 24, 285–306. [Google Scholar] [CrossRef]
- Karasek, R.; Theorell, T. Healthy Work. Stress, Productivity, and the Reconstruction of Working Life; Basic Books: New York, NY, USA, 1990. [Google Scholar]
- Van der Doef, M.; Maes, S. The job demand-control (-support) model and psychological well-being: A review of 20 years of empirical research. Work Stress 1999, 13, 87–114. [Google Scholar] [CrossRef]
- Brun, L.; Wiol, L. Prevention of occupational risks related to the humanrobot collaboration. In Advances in Intelligent Systems and Computing (AISC, vo. 1253), Proceedings of the 3rd International Conference on Human Interaction, Emerging Technologies, and Future Applications III; Paris, France, 27–29 August 2020, Ahram, T., Taiar, R., Langlois, K., Choplin, A., Eds.; Springer: Cham, Switzerland, 2021; pp. 441–446. [Google Scholar] [CrossRef]
- Gombolay, M.; Bair, A.; Huang, C.; Shah, J. Computational design of mixed-initiative human–robot teaming that considers human factors: Situational awareness, workload, and workflow preferences. Int. J. Rob. Res. 2017, 9, 597–617. [Google Scholar] [CrossRef]
- Welfare, K.S.; Hallowell, M.R.; Shah, J.A.; Riek, L.D. Consider the Human Work Experience When Integrating Robotics in the Workplace. In Proceedings of the 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; IEEE: Piscataway, NJ, USA; pp. 75–84. [Google Scholar] [CrossRef]
- Lambrechts, W.; Klaver, J.S.; Koudijzer, L.; Semeijn, J. Human Factors Influencing the Implementation of Cobots in High Volume Distribution Centres. Logistics 2021, 5, 32. [Google Scholar] [CrossRef]
- Hu, L.; Bentler, P.M. Fit indices in covariance structure modeling: Sensitivity to underparameterized model misspecification. Psychol. Methods 1999, 3, 424–453. [Google Scholar] [CrossRef]
- MacKenzie, S.B.; Podsakoff, P.M.; Podsakoff, N.P. Challenge-oriented organizational citizenship behaviors and organizational effectiveness: Do challenge-oriented behaviors really have an impact on the organization’s bottom line? Pers. Psychol. 2011, 64, 559–592. [Google Scholar] [CrossRef]
- Zalewska, A.M. “The Satisfaction with Job Scale”—A measure of cognitive aspect of overall job satisfaction. Acta U. Lod. Folia Psychol. 2003, 7, 49–61. [Google Scholar]
- Brown, T.A. Confirmatory Factor Analysis for Applied Research; Guilford Press: New York, NY, USA, 2006. [Google Scholar]
- Griffin, M.; Steinbrecher, T.D. Large-scale datasets in special education research. Int. Rev. Res. Dev. Disa. 2013, 45, 155–183. [Google Scholar] [CrossRef]
- Kline, R.B. Principles and Practice Of Structural Equation Modeling; Guilford Press: New York, NY, USA, 2016. [Google Scholar]
- Hoyt, W.; Leierer, S.J.; Millington, M.J. Analysis and interpretation of findings using multiple regression techniques. Rehabil. Couns. Bull. 2006, 49, 223–233. [Google Scholar] [CrossRef]
- Pedhazur, E.J. Multiple Regression in Behavioral Research, 3rd ed.; Harcourt Brace: Orlando, FL, USA, 1997. [Google Scholar]
- Chiou, E.K.; Lee, J.D. Trusting Automation: Designing for Responsivity and Resilience. Hum. Factors 2021, 65, 137–165. [Google Scholar] [CrossRef]
- Nenna, F.; Orso, V.; Zanardi, D.; Gamberini, L. The virtualization of human–robot interactions: A user-centric workload assessment. Virtual Real. 2022, 1–9. [Google Scholar] [CrossRef]
- Spector, P.; Bauer, J.; Fox, S. Measurement artifacts in the assessment of counterproductive work behavior and organizational citizenship behavior: Do we know what we think we know? J. Appl. Psychol. 2010, 95, 781–790. [Google Scholar] [CrossRef]
- Koopmans, L.; Bernaards, C.; Hildebrandt, V.; van Buuren, S.; van der Beek, A.J.; de Vet, H.C.W. Development of an individual work performance questionnaire. Int. J. Product. Perform. 2013, 62, 6–28. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | M(SD) | Min-Max | Skewness (SE = 0.17) | Kurtosis (SE = 0.34) | K-S Test |
|---|---|---|---|---|---|
| Human contribution-oriented fluency | 5.56 (1.03) | 3.00–7.00 | −0.42 | −0.30 | 0.09 *** |
| Human emotions-oriented fluency | 5.55 (1.05) | 1.33–7.00 | −0.89 | 1.47 | 0.13 *** |
| Robot-oriented fluency | 5.70 (0.96) | 3.00–7.00 | −0.58 | 0.14 | 0.13 *** |
| Team-oriented fluency | 5.68 (1.01) | 2.67–7.00 | −0.66 | 0.19 | 0.11 *** |
| Overall human-robot interaction fluency | 5.62 (0.94) | 2.92–7.00 | −0.49 | 0.16 | 0.07 * |
| Task performance | 5.73 (0.94) | 2.67–7.00 | −0.57 | 0.10 | 0.11 *** |
| Organizational citizenship behavior | 5.45 (1.05) | 2.67–7.00 | −0.23 | −0.75 | 0.10 *** |
| Creative performance | 5.42 (1.12) | 2.33–7.00 | −0.60 | −0.33 | 0.13 *** |
| Job satisfaction | 5.54 (0.99) | 3.00–7.00 | −0.44 | −0.30 | 0.09 *** |
| Workload | 2.74 (1.03) | 1.00–5.00 | −0.03 | −0.85 | 0.08 ** |
| Variables | (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) |
|---|---|---|---|---|---|---|---|---|
| (1) Human contribution-oriented fluency | - | |||||||
| (2) Human emotions-oriented fluency | 0.84 *** | - | ||||||
| (3) Robot-oriented fluency | 0.84 *** | 0.80 *** | - | |||||
| (4) Team-oriented fluency | 0.81 *** | 0.78 *** | 0.86 *** | - | ||||
| (5) Overall human-robot interaction fluency | 0.94 *** | 0.92 *** | 0.94 *** | 0.93 *** | - | |||
| (6) Task performance | 0.74 *** | 0.75 *** | 0.79 *** | 0.80 *** | 0.83 *** | - | ||
| (7) Organizational citizenship behavior | 0.71 *** | 0.69 *** | 0.73 *** | 0.79 *** | 0.78 *** | 0.78 *** | - | |
| (8) Creative performance | 0.66 *** | 0.65 *** | 0.66 *** | 0.73 *** | 0.72 *** | 0.69 *** | 0.82 *** | - |
| (9) Job satisfaction | 0.84 *** | 0.81 *** | 0.81 *** | 0.85 *** | 0.89 *** | 0.82 *** | 0.83 *** | 0.80 *** |
| Variables | Task Performance | Organizational Citizenship Behavior | Creative Performance | Job Satisfaction | ||||
|---|---|---|---|---|---|---|---|---|
| B(SE) | β | B(SE) | β | B(SE) | β | B(SE) | β | |
| Human contribution-oriented fluency | 0.08 (0.08) | 0.04 | 0.10 (0.10) | 0.09 | 0.14 (0.11) | 0.13 | 0.30 (0.07) | 0.31 *** |
| Human emotions-oriented fluency | 0.18 (0.07) | 0.21 ** | 0.10 (0.08) | 0.10 | 0.12 (0.10 | 0.12 | 0.17(0.06) | 0.18 ** |
| Robot-oriented fluency | 0.24 (0.09) | 0.25 ** | 0.13 (0.11) | 0.12 | −0.02 (0.13) | −0.02 | 0.06 (0.08) | 0.06 |
| Team-oriented fluency | 0.37 (0.08) | 0.40 *** | 0.55 (0.10) | 0.53 *** | 0.61 (0.11) | 0.55 *** | 0.41 (0.07) | 0.42 *** |
| F | 111.95 *** | 86.81 *** | 59.72 *** | 198.97 *** | ||||
| R2 | 0.70 | 0.64 | 0.55 | 0.80 | ||||
| Adj. R2 | 0.69 | 0.63 | 0.54 | 0.80 | ||||
| Variables | Task Performance | Organizational Citizenship Behavior | Creative Performance | Job Satisfaction | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| β | 95% CI | t | β | 95% CI | t | β | 95% CI | t | β | 95% CI | t | |
| Constant | 0.00 | −0.08; 0.07 | 0.01 | 0.00 | −0.08; 0.08 | 0.04 | 0.00 | −0.09; 0.10 | 0.03 | 0.00 | −0.06; 0.06 | 0.03 |
| Overall Fluency (predictor) | 0.81 *** | 0.73; 0.89 | 18.96 | 0.72 *** | 0.64; 0.81 | 16.17 | 0.66 *** | 0.56; 0.76 | 13.05 | 0.85 *** | 0.79; 0.92 | 25.91 |
| Workload (moderator) | 0.02 | −0.07; 0.11 | 0.49 | 0.20 *** | 0.11; 0.29 | 4.27 | 0.16 ** | 0.05; 0.26 | 2.96 | 0.14 *** | 0.08; 0.21 | 4.15 |
| Interaction | ||||||||||||
| Overall Fluency x Workload | −0.05 | −0.14; 0.04 | −1.05 | −0.19 *** | −0.29; −0.09 | −3.84 | 0.−19 ** | −0.30; −0.08 | −3.32 | −0.13 *** | −0.19; −0.05 | −3.34 |
| F | 141.56 *** | 123.52 *** | 80.76 *** | 283.89 *** | ||||||||
| ΔF | 1.11 | 14.75 *** | 10.99 ** | 11.18 *** | ||||||||
| R2 | 0.68 | 0.65 | 0.55 | 0.81 | ||||||||
| ΔR2 | 0.00 | 0.03 | 0.03 | 0.01 | ||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paliga, M. The Relationships of Human-Cobot Interaction Fluency with Job Performance and Job Satisfaction among Cobot Operators—The Moderating Role of Workload. Int. J. Environ. Res. Public Health 2023, 20, 5111. https://doi.org/10.3390/ijerph20065111
Paliga M. The Relationships of Human-Cobot Interaction Fluency with Job Performance and Job Satisfaction among Cobot Operators—The Moderating Role of Workload. International Journal of Environmental Research and Public Health. 2023; 20(6):5111. https://doi.org/10.3390/ijerph20065111
Chicago/Turabian StylePaliga, Mateusz. 2023. "The Relationships of Human-Cobot Interaction Fluency with Job Performance and Job Satisfaction among Cobot Operators—The Moderating Role of Workload" International Journal of Environmental Research and Public Health 20, no. 6: 5111. https://doi.org/10.3390/ijerph20065111
APA StylePaliga, M. (2023). The Relationships of Human-Cobot Interaction Fluency with Job Performance and Job Satisfaction among Cobot Operators—The Moderating Role of Workload. International Journal of Environmental Research and Public Health, 20(6), 5111. https://doi.org/10.3390/ijerph20065111