

Kinematics Analysis of Male Runners via Forefoot and Rearfoot Strike Strategies: A Preliminary Study


Abstract
1. Introduction
2. Experimental Design
2.1. Participants
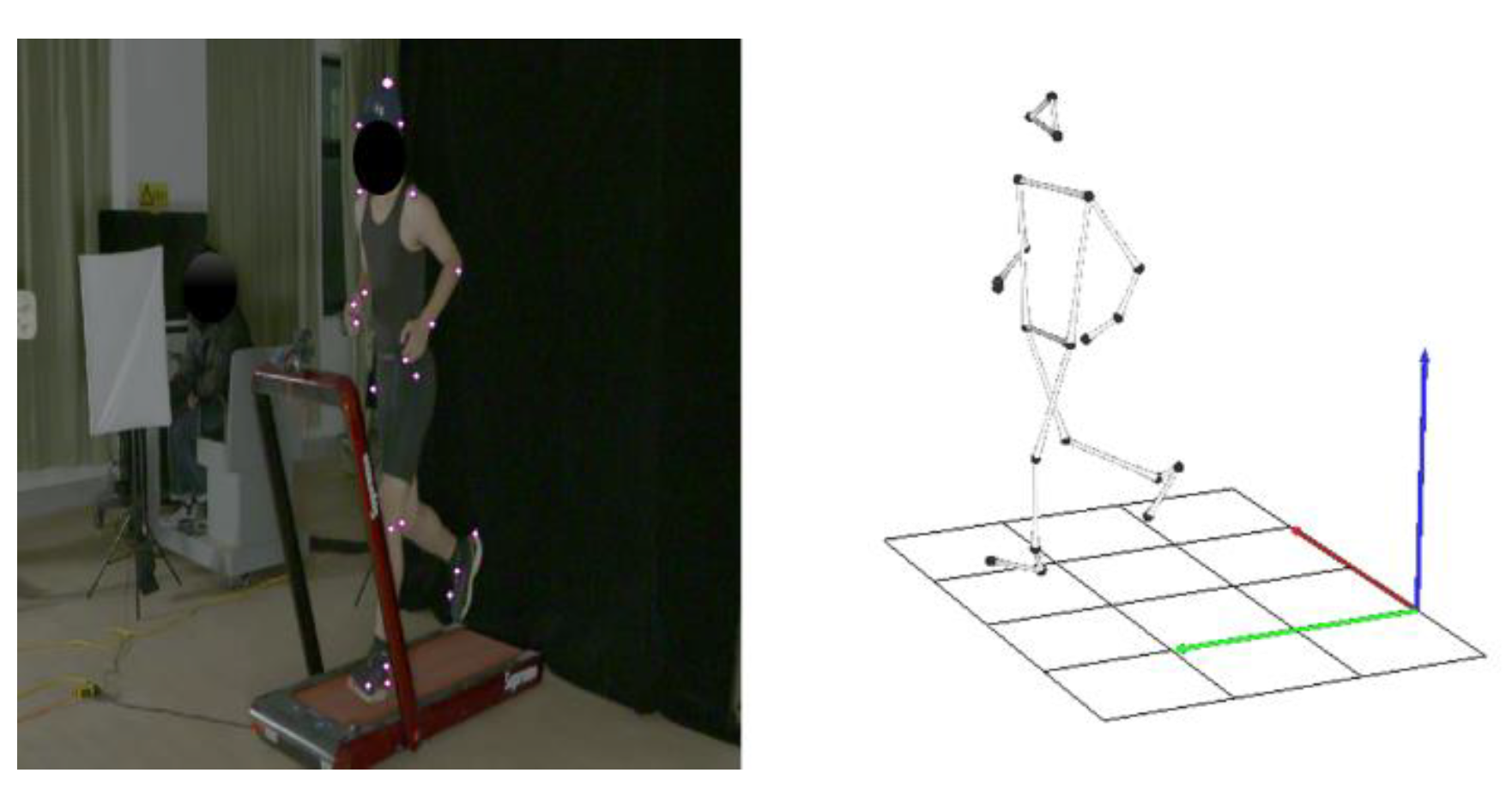
2.2. Equipments and Data Collection
2.3. Data Processing
2.4. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lieberman, D.E.; Venkadesan, M.; Werbel, W.A.; Daoud, A.I.; D’Andrea, S.; Davis, I.S.; Mang’eni, R.O.; Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 2010, 463, 531–535. [Google Scholar] [CrossRef] [PubMed]
- Altman, A.R.; Davis, I.S. A kinematic method for footstrike pattern detection in barefoot and shod runners. Gait Posture 2012, 35, 298–300. [Google Scholar] [CrossRef] [PubMed]
- Altman, A.R.; Davis, I.S. Barefoot running: Biomechanics and implications for running injuries. Curr. Sports Med. Rep. 2012, 11, 244–250. [Google Scholar] [CrossRef] [PubMed]
- Richardson, J.L. Effect of step rate on foot strike pattern and running economy in novice runners. In All Graduate Plan B and Other Reports; Paper 287; Utah State University: Logan, UT, USA, 2013. [Google Scholar]
- Wang, S.C.; Lin, J.C. Scientific Training of Running; Flag Technology: Taipei, China, 2020. [Google Scholar]
- Wu, H.J.; Chen, C.F. Research on the kinematic characteristics of different foot strike strategies. Chung Yuan Phys. Educ. J. 2022, 18, 71–79. [Google Scholar] [CrossRef]
- Daoud, A.I.; Geissler, G.J.; Wang, F.; Saretsky, J.; Daoud, Y.A.; Lieberman, D.E. Foot strike and injury rates in endurance runners: A retrospective study. Med. Sci. Sports Exerc. 2012, 44, 1325–1334. [Google Scholar] [CrossRef]
- De Almeida, M.O.; Saragiotto, B.T.; Yamato, T.P.; Lopes, A.D. Is the rearfoot pattern the most frequently foot strike pattern among recreational shod distance runners? Phys. Ther. Sport 2015, 16, 29–33. [Google Scholar] [CrossRef]
- Saunders, P.U.; Pyne, D.B.; Telford, R.D.; Hawley, J.A. Factors affecting running economy in trained distance runners. Sports Med. 2004, 34, 465–485. [Google Scholar] [CrossRef]
- Barnes, K.R.; Kilding, A.E. Strategies to improve running economy. Sports Med. 2015, 45, 37–56. [Google Scholar] [CrossRef]
- Folland, J.P.; Allen, S.J.; Black, M.I.; Handsaker, J.C.; Forrester, S.E. Running technique is an important component of running economy and performance. Med. Sci. Sports Exerc. 2017, 49, 1412–1423. [Google Scholar] [CrossRef]
- Taboga, P.; Kram, R.; Grabowski, A.M. Maximum-speed curve-running biomechanics of sprinters with and without unilateral leg amputations. J. Exp. Biol. 2016, 219, 851–858. [Google Scholar] [CrossRef]
- Landers, G.J.; Blanksby, B.A.; Ackland, T.R. The relationship between stride rates, lengths, and body size and their effect on elite triathletes' running performance during competition. Int. J. Exerc. Sci. 2011, 4, 238–246. [Google Scholar]
- Danies, J. Daniels' Running Formula; Human Kinetics: Champaign, IL, USA, 2013. [Google Scholar]
- Kwon, Y.H. The Effects of Body Segment Parameter Estimation on the Experimental Simulation of a Complex Airborne Movement. Ph.D. Thesis, Pennsylvania State University, State College, PA, USA, 1993. [Google Scholar]
- Kwon, Y.H. Effects of the method of body segment parameter estimation on airborne angular momentum. J. Appl. Biomech. 1996, 12, 413–430. [Google Scholar] [CrossRef]
- Kwon, Y.H. Experimental simulation of an airborne movement: Applicability of the body segment parameter estimation methods. J. Appl. Biomech. 2001, 17, 232–240. [Google Scholar] [CrossRef][Green Version]
- Nummela, A.; Keranen, T.; Mikkelsson, L.O. Factors related to top running speed and economy. Int. J. Sports Med. 2007, 28, 655–661. [Google Scholar] [CrossRef] [PubMed]
- Millet, G.Y.; Morin, J.-B.; Degache, F.; Edouard, P.; Feasson, L.; Verney, J.; Oullion, R. Running from paris to beijing: Biomechanical and physiological consequences. Eur. J. Appl. Physiol. 2009, 107, 731–738. [Google Scholar] [CrossRef]
- Santos-Concejero, J.; Granados, C.; Irazusta, J.; Bidaurrazaga-Letona, I.; Zabala-Lili, J.; Tam, N.; Gil, S.M. Differences in ground contact time explain the less efficient running economy in north african runners. Biol. Sport 2013, 30, 181–187. [Google Scholar] [CrossRef]
- Santos-Concejero, J.; Tam, N.; Granados, C.; Irazusta, J.; Bidaurrazaga-Letona, I.; Zabala-Lili, J.; Gil, S.M. Stride angle as a novel indicator of running economy in well-trained runners. J. Strength Conditoning Res. 2014, 28, 1889–1895. [Google Scholar] [CrossRef]
- Santos-Concejero, J.; Tam, N.; Granados, C.; Irazusta, J.; Bidaurrazaga-Letona, I.; Zabala-Lili, J.; Gil, S.M. Interaction effects of stride angle and strike pattern on running economy. Int. J. Sports Med. 2014, 35, 1118–1123. [Google Scholar] [CrossRef]
- McMahon, T.A.; Cheng, G.C. The mechanics of running: How does stiffness couple with speed? J. Biomech. 1990, 23, 65–78. [Google Scholar] [CrossRef]
- Brughelli, M.; Cronin, J. Influence of running velocity on vertical, leg and joint stiffness—Modelling and Recommendations for Future Research. Sports Med. 2008, 38, 647–657. [Google Scholar] [CrossRef]
- Morin, J.-B.; Dalleau, G.; Kyrolainen, H.; Jeannin, T.; Belli, A. A simple method for measuring stiffness during running. J. Appl. Biomechancis 2005, 21, 167–180. [Google Scholar] [CrossRef] [PubMed]
- Novacheck, T.F. The biomechanics of running. Gait Posture 1998, 7, 77–95. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Hillsdale, N.J., Ed.; Lawrence Erlbaum Associates: New York, NY, USA, 1988. [Google Scholar]
- Mousavi, S.H.; Hijmans, J.M.; Moeini, F.; Rajabi, R.; Ferber, R.; van der Worp, H.; Zwerver, J. Validity and reliability of a smartphone motion analysis app for lower limb kinematics during treadmill running. Phys. Ther. Sport 2020, 43, 27–35. [Google Scholar] [CrossRef] [PubMed]
- Neal, B.S.; Lack, S.D.; Barton, C.J.; Birn-Jeffery, A.; Miller, S.; Morrissey, D. Is markerless, smart phone recorded two-dimensional video a clinically useful measure of relevant lower limb kinematics in runners with patellofemoral pain? A validity and reliability study. Phys. Ther. Sport 2020, 43, 36–42. [Google Scholar] [CrossRef]
- Napier, C.; Goom, T.; Rankin, A. Infographic. Remote running gait analysis. Br. J. Sports Med. 2021, 55, 512–513. [Google Scholar] [CrossRef]
- Ogueta-Alday, A.; Morante, J.C.; Gomez-Molina, J.; Garcıa-Lopez, J. Similarities and differences among half-marathon runners according to their performance level. PLoS ONE 2018, 13, e0191688. [Google Scholar] [CrossRef]
- Morin, J.B.; Samozino, P.; Zameziati, K.; Belli, A. Effects of altered stride frequency and contact time on leg-spring behavior in human running. J. Biomech. 2007, 40, 3341–3348. [Google Scholar] [CrossRef]
- Moore, I.S. Is there an economical running technique? A review of modifiable biomechanical factors affecting running economy. Sports Med. 2016, 46, 793–807. [Google Scholar] [CrossRef]
- Santos-Concejero, J.; Granados, C.; Irazusta, J.; Bidaurrazaga-Letona, I.; Zabala-Lili, J.; Tam, N.; Gil, S.M. Influence of the biomechanical variables of the gait cycle in running economy. Rev. Int. Cienc. Deporte 2014, 36, 96–108. [Google Scholar]
- Lieberman, D.E.; Warrener, A.G.; Wang, J.; Castillo, E.R. Effects of stride frequency and foot position at landing on braking force, hip torque, impact peak force and the metabolic cost of running in humans. J. Exp. Biol. 2015, 218, 3406–3414. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Center of Gravity of Segment (Proximal) | Mass of Segment | Moment of Inertia-Frontal Axis | Moment of Inertia-Sagittal Axis | Moment of Inertia-Vertical Axis | |
|---|---|---|---|---|---|
| (CM) (%) | (Mass) (%) | (Ixx) (kg·cm2) | (Iyy) (kg·cm2) | (Izz) (kg·cm2) | |
| Trunk | 47.66 | 46.84 | 25.55 | 31.82 | 15.17 |
| Head | 50 | 8.26 | 25.82 | 26.47 | 28.36 |
| Upper arm | 43.6 | 3.25 | 29.98 | 30.69 | 12.08 |
| Antebrachium | 43 | 1.87 | 28.8 | 29.23 | 10.35 |
| Hand | 46.8 | 0.65 | 46.28 | 50.84 | 25.59 |
| Thigh | 43.3 | 10.5 | 32.04 | 31.51 | 13.58 |
| Shank | 43.4 | 4.75 | 29.18 | 29.18 | 7.67 |
| Foot | 50 | 1.43 | 25.69 | 26.94 | 12.45 |
| RFS | FFS | z | d | Effect Size | Power | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Base variable | |||||||||||
| Stride (m) | 1.02 | ± | 0.06 | 1.03 | ± | 0.07 | −0.715 | 0.153 | - | 0.080 | |
| Contact times (s) | 0.32 | ± | 0.03 | 0.31 | ± | 0.03 | −1.610 | 0.333 | small | 0.216 | |
| Flight times (s) | 0.05 | ± | 0.02 | 0.06 | ± | 0.01 | −2.482 | * | 0.632 | medium | 0.602 |
| Advanced variable | |||||||||||
| Duty factor (%) | 0.87 | ± | 0.06 | 0.84 | ± | 0.03 | −2.594 | ** | 0.632 | medium | 0.602 |
| Stride angle (deg) | 0.73 | ± | 0.71 | 1.01 | ± | 0.32 | −2.552 | * | 0.508 | medium | 0.430 |
| Vertical stiffness(kN/m) | 21.15 | ± | 3.43 | 20.50 | ± | 4.09 | −0.726 | 0.172 | - | 0.093 | |
| Leg stiffness (kN/m) | 7.51 | ± | 1.99 | 7.83 | ± | 1.74 | −0.892 | 0.171 | - | 0.092 | |
| RFS | FFS | z | d | Effect Size | Power | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Contact | |||||||||||
| V COG (m/s) | 0.57 | ± | 0.09 | 0.65 | ± | 0.06 | −2.883 | ** | 1.046 | large | 0.955 |
| A COG (deg) | −82.23 | ± | 5.24 | −88.48 | ± | 4.74 | −2.924 | ** | 1.251 | large | 0.992 |
| H COG (m) | 102.77 | ± | 3.49 | 100.16 | ± | 3.72 | −1.950 | 0.724 | medium | 0.719 | |
| Hip joint (deg) | 160.31 | ± | 13.37 | 167.01 | ± | 4.77 | −1.431 | 0.667 | medium | 0.648 | |
| Knee joint (deg) | 160.16 | ± | 9.27 | 160.73 | ± | 5.46 | −0.353 | 0.075 | - | 0.058 | |
| Ankle joint (deg) | 89.24 | ± | 7.03 | 106.60 | ± | 9.73 | −4.003 | ** | 2.045 | large | 1.000 |
| Full-support | |||||||||||
| V COG (m/s) | 0.44 | ± | 0.17 | 0.64 | ± | 0.12 | −3.007 | ** | 1.359 | large | 0.997 |
| A COG (deg) | 57.19 | ± | 77.59 | 94.68 | ± | 4.24 | −1.390 | 0.682 | medium | 0.667 | |
| H COG (m) | 95.26 | ± | 4.51 | 98.56 | ± | 3.70 | −2.054 | * | 0.800 | large | 0.800 |
| Hip joint (deg) | 166.88 | ± | 11.22 | 169.12 | ± | 4.75 | −0.270 | 0.260 | small | 0.150 | |
| Knee joint (deg) | 141.16 | ± | 7.57 | 149.03 | ± | 9.56 | −2.385 | * | 0.913 | large | 0.892 |
| Ankle joint (deg) | 74.63 | ± | 6.11 | 87.51 | ± | 11.47 | −3.132 | ** | 1.402 | large | 0.998 |
| Toe-off | |||||||||||
| V COG (m/s) | 0.25 | ± | 0.12 | 0.22 | ± | 0.10 | −0.560 | 0.272 | small | 0.160 | |
| A COG (deg) | −41.73 | ± | 59.41 | −58.86 | ± | 32.10 | −0.767 | 0.233 | small | 0.130 | |
| H COG (m) | 104.02 | ± | 3.66 | 102.44 | ± | 4.21 | −1.099 | 0.401 | small | 0.291 | |
| Hip joint (deg) | 165.06 | ± | 7.37 | 162.74 | ± | 6.47 | −1.265 | 0.335 | small | 0.218 | |
| Knee joint (deg) | 145.43 | ± | 6.44 | 150.02 | ± | 8.51 | −1.472 | 0.608 | medium | 0.569 | |
| Ankle joint (deg) | 103.44 | ± | 6.72 | 115.96 | ± | 12.61 | −2.987 | ** | 1.239 | large | 0.991 |
| Min knee angle | |||||||||||
| V COG (m/s) | 0.26 | ± | 0.14 | 0.30 | ± | 0.14 | −0.850 | 0.286 | small | 0.172 | |
| A COG (deg) | 81.78 | ± | 70.50 | 87.15 | ± | 63.28 | −0.518 | 0.080 | - | 0.059 | |
| H COG (m) | 96.90 | ± | 3.59 | 94.96 | ± | 4.15 | −1.472 | 0.500 | medium | 0.419 | |
| Hip joint (deg) | 161.72 | ± | 15.93 | 166.33 | ± | 6.83 | −0.684 | 0.376 | small | 0.262 | |
| Knee joint (deg) | 95.95 | ± | 16.26 | 99.95 | ± | 15.35 | −0.270 | 0.253 | small | 0.144 | |
| Ankle joint (deg) | 87.19 | ± | 5.25 | 100.90 | ± | 12.91 | −3.256 | ** | 1.391 | large | 0.998 |
| Model | R | R Square | ΔF | B | Beta (β) |
|---|---|---|---|---|---|
| (constant) | 0.856 | ||||
| Flight times | 0.986 | 0.973 | 469.470 ** | −2.889 | −1.006 |
| Stride | 1.000 | 0.999 | 457.968 ** | 0.151 | 0.162 |
| V COG in the toe-off phase | 1.000 | 1.000 | 13.511 ** | −0.010 | −0.020 |
| Model | R | R Square | ΔF | B | Beta (β) |
|---|---|---|---|---|---|
| (constant) | 0.829 | ||||
| Stride angle | 0.970 | 0.940 | 205.107 ** | −0.068 | −0.784 |
| Contact times | 0.995 | 0.990 | 57.383 ** | 0.262 | 0.264 |
| A COG in the min knee angle phase | 0.999 | 0.997 | 27.064 ** | 0.000 | −0.103 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-F.; Wu, H.-J.; Liu, C.; Wang, S.-C. Kinematics Analysis of Male Runners via Forefoot and Rearfoot Strike Strategies: A Preliminary Study. Int. J. Environ. Res. Public Health 2022, 19, 15924. https://doi.org/10.3390/ijerph192315924
Chen C-F, Wu H-J, Liu C, Wang S-C. Kinematics Analysis of Male Runners via Forefoot and Rearfoot Strike Strategies: A Preliminary Study. International Journal of Environmental Research and Public Health. 2022; 19(23):15924. https://doi.org/10.3390/ijerph192315924
Chicago/Turabian StyleChen, Chao-Fu, Hui-Ju Wu, Chao Liu, and Soun-Cheng Wang. 2022. "Kinematics Analysis of Male Runners via Forefoot and Rearfoot Strike Strategies: A Preliminary Study" International Journal of Environmental Research and Public Health 19, no. 23: 15924. https://doi.org/10.3390/ijerph192315924
APA StyleChen, C.-F., Wu, H.-J., Liu, C., & Wang, S.-C. (2022). Kinematics Analysis of Male Runners via Forefoot and Rearfoot Strike Strategies: A Preliminary Study. International Journal of Environmental Research and Public Health, 19(23), 15924. https://doi.org/10.3390/ijerph192315924