

Why Do Drivers’ Collision Avoidance Maneuvers Tend to Cause SUVs to Sideslip or Rollover on Horizontal Curve and Grade Combinations?—An Analysis of the Causes Based on a Modified Multibody Dynamics Model


Abstract
1. Introduction
2. Materials and Methods
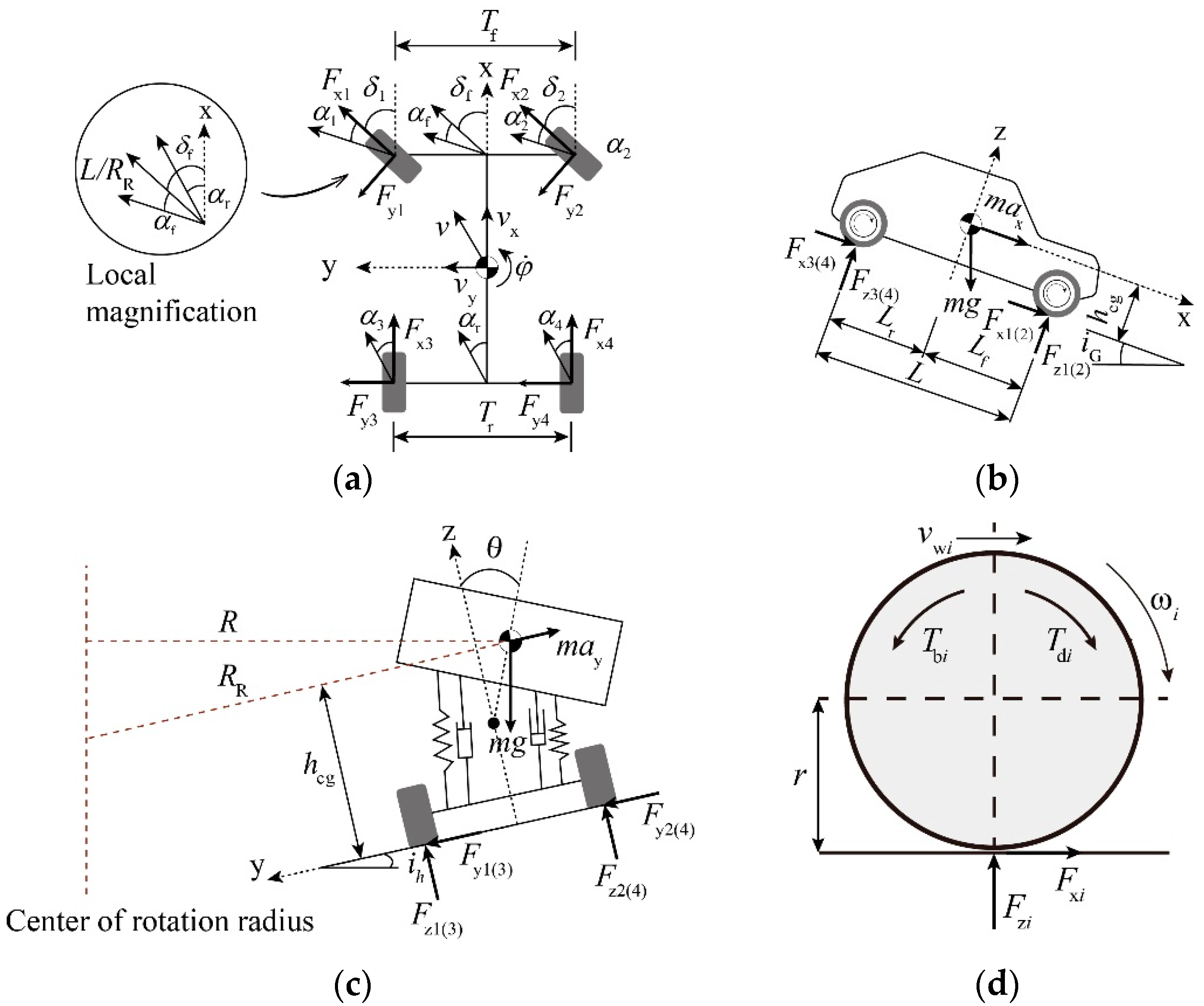
2.1. An Improved Multibody Model with Superelevation and Longitudinal Slope Variables
- The vehicle is symmetrical about the vertical axis;
- The steering wheels of the vehicle are the front wheels;
- It is assumed that the vehicle steers with the normal direction of all wheels pointing to the same point, i.e., the vehicle steers in accordance with Ackermann steering characteristics;
- The effect of tire retraction torque on tire characteristics is neglected;
- The yaw and pitching caused to the vehicle in addition to the longitudinal slope and superelevation are ignored.
2.2. Safety Margin Evaluation Method under Collision Avoidance Maneuvers
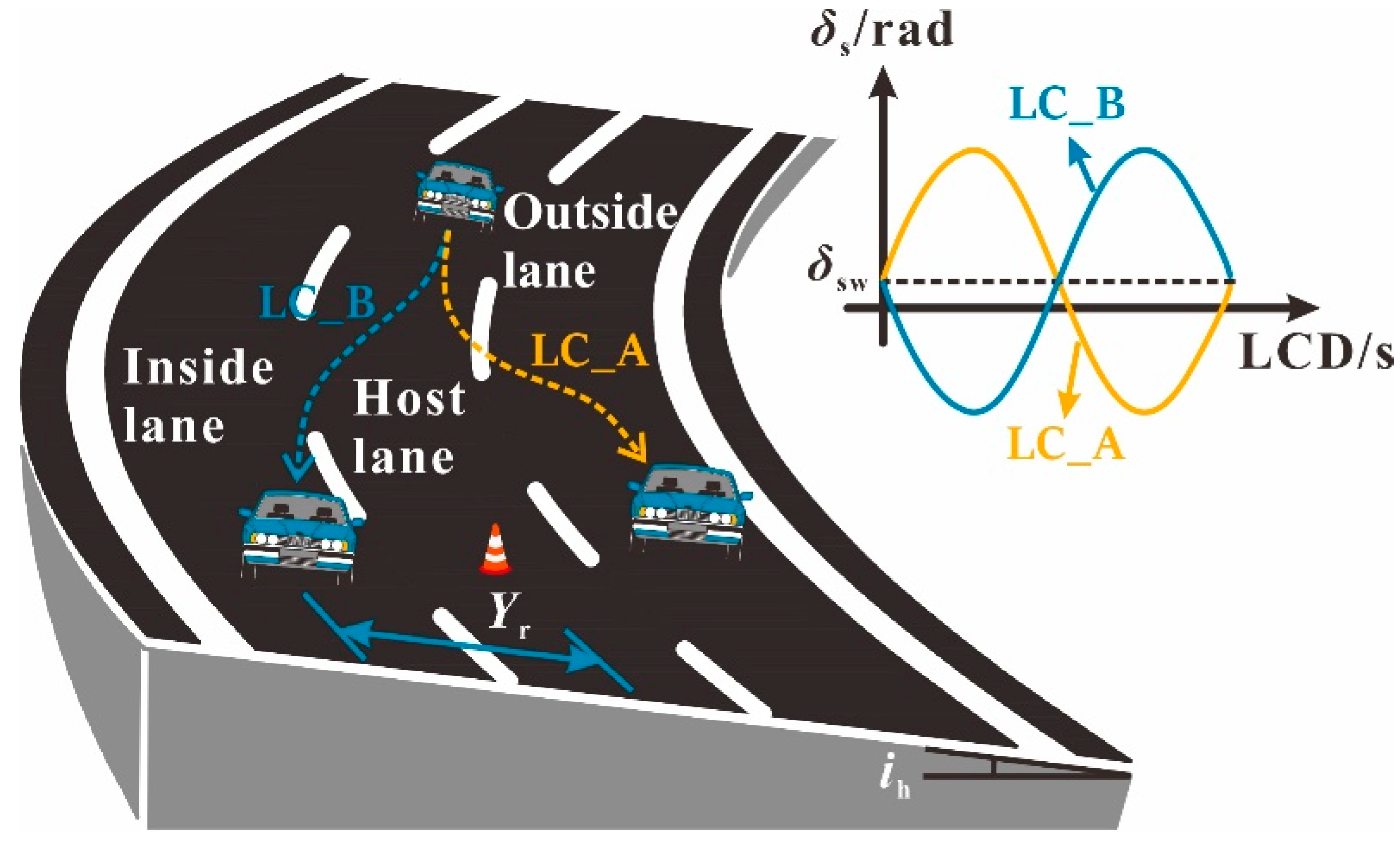
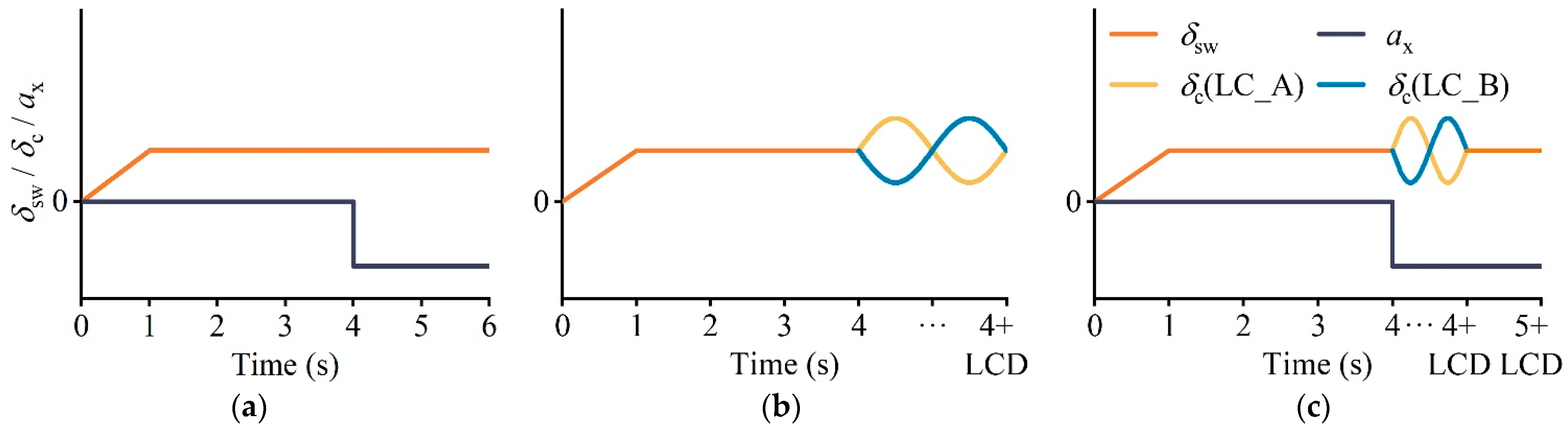
2.2.1. Typical Collision Avoidance Maneuvers
- The vehicle maintains a constant speed on the curve (ax = 0 m·s−2);
- Vehicle braking at a typical deceleration rate on the curve (ax = −1 m·s−2);
- The vehicle enters the circular curve with the deceleration used to calculate the stopping sight distance (ax = −3.4 m·s−2);
- Emergency braking of the vehicle on the curve (ax = −4.5 m·s−2);
- The vehicle enters the curve at a rare emergency braking deceleration (ax = −6 m·s−2).
2.2.2. Safety Margin Evaluation Index
3. Results and Discussion
3.1. The Effects of Superelevation and Longitudinal Slope on the Safety Margin of the SUV
3.2. The Effects of Drivers’ Braking and Lane Change Maneuvers on the Safety Margin of the SUV
3.3. The Effect of Lane Change with Braking Maneuvers on the Safety Margin of the SUV
4. Conclusions
- Under the same road conditions, safety margins decrease sharply as braking deceleration increases. Braking with less than the designed deceleration (ax = –3.4 m·s−2) has a manageable effect on the safety margins. Under emergency braking conditions (ax = –4.5 m·s−2), safety margins are significantly reduced. In the special case where ax = −6 m·s−2, the vehicle may sideslip on a road with a circular curve of 270 m radius, so strict speed control on curves of small radius could help prevent SUVs from sideslipping;
- The adverse effects of a lane change on the design safety margins are related to the duration and direction of the lane change. The marginal effects of lane changing manipulation show an increasing trend. When the lane change direction is the same as the curve bending direction, the normal lane change behavior of the driver (LCD > 4 s) has limited impact on safety, but the driver’s emergency lane change maneuver (LCD < 2 s) will cause the SUV to sideslip. Under the same lane change duration and alignment conditions, the direction of lane change determines the degree of safety margin reduction such that a lane change in the direction opposite to the curve bias results in a greater reduction in the safety margin. Therefore, emergency lane changes should be avoided as much as possible, especially when the lane change direction is opposite to the curve bending direction;
- With the combined effect of braking and steering, the safety margin of the SUV decreases most when braking occurs 0.25 s before the maximum instantaneous steering angle (positive value) is reached, and the degree of decrease in the design safety margin reduction rate is greater than that observed with the corresponding pure braking or lane change maneuvers;
- Under the same collision avoidance behavior, the safety margin of the horizontal curve and grade combinations is mainly influenced by the radius of the circular curve and superelevation, with only a small effect of the longitudinal slope on the safety margin. As the radius of the circular curve decreases, the safety margin under the same collision avoidance behavior decreases rapidly;
- Although the multibody simulation model is more accurate than the point–mass model, it has some limitations. For example, the currently developed models and evaluation methods cannot account for the fact that the speed of vehicles in bad weather (such as rain, fog, ice, and snow) is lower than in normal weather and that collision avoidance manipulation is also related to the driver’s personality [57]. Fortunately, the improved 8DOF multibody model and safety margin assessment method proposed in this study are flexible and allow for the modification of driving behavior parameters and the addition of environmental variables. Future field tests will collect data on real-world driving behavior, and input conditions will be modified or added to achieve a more precise assessment of sideslip and rollover safety margins;
- The pioneering design safety margin reduction rate index provides a new perspective for the safety evaluation of combined horizontal curve and grade combinations. The thresholds in this index do not affect the trend of safety reduction under different collision avoidance maneuvers, but rather affect the specific results of safety margin evaluations. The accurate lateral friction coefficient and lateral load transfer ratio thresholds will be studied separately in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khattak, A.J.; Schneider, R.J.; Targa, F. Risk Factors in Large Truck Rollovers and Injury Severity: Analysis of Single-Vehicle Collisions. Transp. Res. Rec. 2003, 40, 1–22. [Google Scholar] [CrossRef]
- Kim, K.; Guan, H.; Wang, B.; Guo, R.; Liang, F. Active Steering Control Strategy for Articulated Vehicles. Front. Inf. Technol. Electron. Eng. 2016, 17, 576–586. [Google Scholar] [CrossRef]
- Lamm, R.; Psarianos, B.; Cafiso, S. Safety Evaluation Process for Two-Lane Rural Roads: A 10-Year Review. Transp. Res. Rec. J. Transp. Res. Board 2002, 1796, 51–59. [Google Scholar] [CrossRef]
- Deng, Z.; Chu, D.; Wu, C.; He, Y.; Cui, J. Curve Safe Speed Model Considering Driving Style Based on Driver Behaviour Questionnaire. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 536–547. [Google Scholar] [CrossRef]
- He, Y.; Yang, X.; Ren, W.; Chu, D.; Wu, C. A Review of Anti-Rollover Prediction and Control Technologies for Heavy-Duty Vehicles. J. Transp. Inf. Saf. 2019, 37, 1–9. [Google Scholar]
- Wilmot, C.G.; Khanal, M. Effect of Speed Limits on Speed and Safety: A Review. Transp. Rev. 1999, 19, 315–329. [Google Scholar] [CrossRef]
- Chen, B.C.; Peng, H. Differential-Braking-Based Rollover Prevention for Sport Utility Vehicles with Human-in-the-Loop Evaluations. Veh. Syst. Dyn. 2001, 36, 359–389. [Google Scholar] [CrossRef]
- Khattak, A.J.; Rocha, M. Are SUVs “Supremely Unsafe Vehicles”?: Analysis of Rollovers and Injuries with Sport Utility Vehicles. Transp. Res. Rec. 2003, 1840, 167–177. [Google Scholar] [CrossRef]
- Brennan, S.N.; Hamblin, B.C. Utilization of Vehicle Dynamic Simulations as Predictors of Highway Safety. In Proceedings of the ASME 2007 International Mechanical Engineering Congress and Exposition, Washington, DC, USA, 11 November 2007. [Google Scholar]
- Hassan, M.A.; Abdelkareem, M.A.A.; Moheyeldein, M.M.; Elagouz, A.; Tan, G. Advanced Study of Tire Characteristics and Their Influence on Vehicle Lateral Stability and Untripped Rollover Threshold. Alex. Eng. J. 2020, 59, 1613–1628. [Google Scholar] [CrossRef]
- Huston, R.L.; Kelly, F.A. Another Look at the Static Stability Factor (SSF) in Predicting Vehicle Rollover. Int. J. Crashworthiness 2014, 19, 567–575. [Google Scholar] [CrossRef]
- Phanomchoeng, G.; Rajamani, R. New Rollover Index for the Detection of Tripped and Untripped Rollovers. IEEE Trans. Ind. Electron. 2013, 60, 4726–4736. [Google Scholar] [CrossRef]
- Zhu, T.; Yin, X.; Li, B.; Ma, W. A Reliability Approach to Development of Rollover Prediction for Heavy Vehicles Based on Svm Empirical Model with Multiple Observed Variables. IEEE Access 2020, 8, 89367–89380. [Google Scholar] [CrossRef]
- Psarianos, B.; Kontaratos, M.; Katsios, D. Influence of Vehicle Parameters on Horizontal Curve Design of Rural Highways. Transp. Res. Circ. 1998, 22, 1–10. [Google Scholar]
- Alrejjal, A.; Ksaibati, K. Impact of Combined Alignments and Different Weather Conditions on Vehicle Rollovers. KSCE J. Civ. Eng. 2022, 26, 893–906. [Google Scholar] [CrossRef]
- Torbic, D.J.; Harwood, D.W.; Gilmore, D.K.; Pfefer, R.; Neuman, T.R.; Slack, K.L.; Hardy, K.K. Guidance for Implementation of the AASHTO Strategic Highway Safety Plan, Volume 7: A Guide for Reducing Collisions on Horizontal Curves; National Research Council: Washington, DC, USA, 2004. [Google Scholar]
- Chen, S.; Saeed, T.U.; Alinizzi, M.; Lavrenz, S.; Labi, S. Safety Sensitivity to Roadway Characteristics: A Comparison across Highway Classes. Accid. Anal. Prev. 2019, 123, 39–50. [Google Scholar] [CrossRef] [PubMed]
- Buddhavarapu, P.; Banerjee, A.; Prozzi, J.A. Influence of Pavement Condition on Horizontal Curve Safety. Accid. Anal. Prev. 2013, 52, 9–18. [Google Scholar] [CrossRef] [PubMed]
- Bauer, K.M.; Harwood, D.W. Safety Effects of Horizontal Curve and Grade Combinations on Rural Two-Lane Highways. Transp. Res. Rec. 2013, 2398, 37–49. [Google Scholar] [CrossRef]
- Findley, D.J.; Hummer, J.E.; Rasdorf, W.; Zegeer, C.V.; Fowler, T.J. Modeling the Impact of Spatial Relationships on Horizontal Curve Safety. Accid. Anal. Prev. 2012, 45, 296–304. [Google Scholar] [CrossRef] [PubMed]
- Treat, J.R.; Tumbas, N.S.; McDonald, S.T.; Shinar, D.; Hume, R.D.; Mayer, R.E.; Stansifer, R.L.; Castellan, N.J. Tri-Level Study of the Causes of Traffic Accidents: Final Report. Executive Summary; Institute for Research in Public Safety: Indiana, IL, USA, 1979. [Google Scholar]
- Gallen, R.; Hautière, N.; Cord, A.; Glaser, S. Supporting Drivers in Keeping Safe Speed in Adverse Weather Conditions by Mitigating the Risk Level. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1558–1571. [Google Scholar] [CrossRef]
- Radt, H.S.; Mtllke, W.F. Motions of Skidding Automobiles; Cornell Aeronautical Laboratory: New York, NY, USA, 1960. [Google Scholar]
- Yan, M.; Xu, J.; Han, S.; Xin, T.; Wang, O.; Yi, Z.; Liu, Z. Permitted Speed Decision of Single-Unit Trucks with Emergency Braking Maneuver on Horizontal Curves under Rainy Weather. PLoS ONE 2021, 16, e0261975. [Google Scholar] [CrossRef]
- Xin, T.; Xu, J.; Gao, C.; Sun, Z. Research on the Speed Thresholds of Trucks in a Sharp Turn Based on Dynamic Rollover Risk Levels. PLoS ONE 2021, 16, e0256301. [Google Scholar] [CrossRef] [PubMed]
- MacAdam, C.C.; Fancher, P.S.; Segel, L. Side Friction for Superelevation on Horizontal Curves: Volume II-Technical Report; Final Report; The University of Michigan: Ann Arbor, MI, USA, 1985. [Google Scholar]
- Jin, X.; Yin, G. Estimation of Lateral Tire–Road Forces and Sideslip Angle for Electric Vehicles Using Interacting Multiple Model Filter Approach. J. Frankl. Inst. 2015, 352, 686–707. [Google Scholar] [CrossRef]
- Wong, J.Y. Mechanics of Pneumatic Tires. In Theory of Ground Vehicles; John Wiley & Sons: New York, NY, USA, 2001; pp. 10–17. [Google Scholar]
- Pacejka, H.B.; Besselink, I.J.M. Magic Formula Tyre Model with Transient Properties. Veh. Syst. Dyn. 1997, 27, 234–249. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; Xiang, C.; Li, L.; Wang, X. Torque Coordinated Control of Four In-Wheel Motor Independent-Drive Vehicles With Consideration of the Safety and Economy. IEEE Trans. Veh. Technol. 2019, 68, 9604–9618. [Google Scholar] [CrossRef]
- Yu, Z. Automobile Theory, 6th ed.; China Machine Press: Beijing, China, 2019. [Google Scholar]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics, Revised Edition, 2nd ed.; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Salvucci, D.D.; Liu, A. The Time Course of a Lane Change: Driver Control and Eye-Movement Behavior. Transp. Res. Part F Traffic Psychol. Behav. 2002, 5, 123–132. [Google Scholar] [CrossRef]
- Winsum, W.; Waard, D.; Brookhuis, K.A. Lane Change Manoeuvres and Safety Margins. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 139–149. [Google Scholar] [CrossRef]
- Torbic, D.J.; O’Laughlin, M.K.; Harwood, D.W.; Bauer, K.M.; Bokenkroger, C.D.; Lucas, L.M.; Ronchetto, J.R.; Brennan, S.; Donnell, E.; Brown, A.; et al. Superelevation Criteria for Sharp Horizontal Curves on Steep Grades; Transportation Research Board: Washington, DC, USA, 2014. [Google Scholar]
- Markkula, G.; Engström, J.; Lodin, J.; Bärgman, J.; Victor, T. A Farewell to Brake Reaction Times? Kinematics-Dependent Brake Response in Naturalistic Rear-End Emergencies. Accid. Anal. Prev. 2016, 95, 209–226. [Google Scholar] [CrossRef] [PubMed]
- Bonneson, J.A. Superelevation Distribution Methods and Transition Designs; Transportation Research Board: Washington, DC, USA, 2000. [Google Scholar]
- American Association of State Highway Transportation Officials (AASHTO). A Policy on Geometric Design of Highways and Streets, 7th ed.; Association of State Highway Transportation Officials: Washington, DC, USA, 2018. [Google Scholar]
- Lee, S.E.; Olsen, E.C.B.; Wierwille, W.W. A Comprehensive Examination of Naturalistic Lane-Changes; National Highway Traffic Safety Administration: Washington, DC, USA, 2004. [Google Scholar]
- Thiemann, C.; Treiber, M.; Kesting, A. Estimating Acceleration and Lane-Changing Dynamics from next Generation Simulation Trajectory Data. Transp. Res. Rec. 2008, 2088, 90–101. [Google Scholar] [CrossRef]
- Wang, C.; Sun, Q.; Li, Z.; Zhang, H. Human-like Lane Change Decision Model for Autonomous Vehicles That Considers the Risk Perception of Drivers in Mixed Traffic. Sensors 2020, 20, 2259. [Google Scholar] [CrossRef]
- Gayah, V.V.; Donnell, E.T. Estimating Safety Performance Functions for Two-Lane Rural Roads Using an Alternative Functional Form for Traffic Volume. Accid. Anal. Prev. 2021, 157, 106173. [Google Scholar] [CrossRef]
- Eftekharzadeh, S.F.; Khodabakhshi, A. Safety Evaluation of Highway Geometric Design Criteria in Horizontal Curves at Downgrades. Int. J. Civ. Eng. 2014, 12, 326–332. [Google Scholar]
- Lamm, R.; Guenther, A.K.; Choueiri, E.M. Safety Module for Highway Geometric Design. Transp. Res. Rec. 1995, 1512, 7–15. [Google Scholar]
- Jin, Z.; Li, J.; Huang, Y.; Khajepour, A. Study on Rollover Index and Stability for a Triaxle Bus. Chin. J. Mech. Eng. 2019, 32, 64. [Google Scholar] [CrossRef]
- Tan, C.H. An Investigation of Comfortable Lateral Acceleration on Horizontal Curves. Doctoral Thesis, The Pennsylvania State University, University Park, PA, USA, 2005. [Google Scholar]
- Taragin, A.; Leisch, L.E. Driver Performance on Horizontal Curves. In Proceedings of the Highway Research Board Proceedings, Washington, DC, USA, 12–15 January 1954; Volume 33, pp. 446–465. [Google Scholar]
- Harwood, D.W.; Mason, J.M., Jr. Horizontal Curve Design for Passenger Cars and Trucks. Transp. Res. Rec. 1994, 1445, 22–33. [Google Scholar]
- McLean, J.R. Driver Behaviour on Curves—A Review. In Proceedings of the 7th Australian Road Research Board (ARRB) Conference, Adelaide, Australia, August 1974; pp. 129–147. [Google Scholar]
- Zhao, W.; Ji, L.; Wang, C. H∞ Control of Integrated Rollover Prevention System Based on Improved Lateral Load Transfer Rate. Trans. Inst. Meas. Control 2019, 41, 859–874. [Google Scholar] [CrossRef]
- Mechanical Simulation. Available online: https://www.carsim.com/products/carsim/data.php (accessed on 28 July 2022).
- Torbic, D.J.; Donnell, E.T.; Brennan, S.N.; Brown, A.; O’Laughlin, M.K.; Bauer, K.M. Superelevation Design for Sharp Horizontal Curves on Steep Grades. Transp. Res. Rec. 2014, 2436, 81–91. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, H.; Li, Y.; Lee, J.; Long, K.; Gu, R.; Zhai, X. Modeling Accident Risks in Different Lane-Changing Behavioral Patterns. Anal. Methods Accid. Res. 2021, 30, 100159. [Google Scholar] [CrossRef]
- Yin, Y.; Wen, H.; Sun, L.; Hou, W. The Influence of Road Geometry on Vehicle Rollover and Skidding. Int. J. Environ. Res. Public. Health 2020, 17, 1648. [Google Scholar] [CrossRef]
- Abdollahzadeh Nasiri, A.S.; Rahmani, O.; Abdi Kordani, A.; Karballaeezadeh, N.; Mosavi, A. Evaluation of Safety in Horizontal Curves of Roads Using a Multi-Body Dynamic Simulation Process. Int. J. Environ. Res. Public. Health 2020, 17, 5975. [Google Scholar] [CrossRef]
- Vlk, F. Lateral Dynamics of Commercial Vehicle Combinations: A Literature Survey. Veh. Syst. Dyn. 1982, 11, 305–324. [Google Scholar] [CrossRef]
- Das, A.; Ahmed, M.M. Exploring the Effect of Fog on Lane-Changing Characteristics Utilizing the SHRP2 Naturalistic Driving Study Data. J. Transp. Saf. Secur. 2021, 13, 477–502. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P | I | D |
|---|---|---|
| 0.3 | 25 | 0.0001 |
| Symbol/Unit | Parameters | Symbol/Unit | Parameters |
|---|---|---|---|
| m/kg | 1530 | g/(m·s−2) | 9.81 |
| mb/kg | 1430 | Iz/(kg·m2) | 2059.2 |
| mw/kg | 25 | Ix/(kg·m2) | 700.7 |
| Tf/m | 1.565 | Ixz/(kg·m2) | 0 |
| Tr/m | 1.565 | Itire/(kg·m2) | 1.9 |
| Lf/m | 1.05 | Kθ /(N·m·rad−1) | 145,330 |
| Lr/m | 1.61 | Cθ /(N·m·rad−1) | 4500 |
| hcg/m | 0.65 | P/kW | 160 |
| hs/m | 0.65 | T/(N·m) | 1000 |
| r/m | 0.357 | isw/(nondimensional quantity) | 20 |
| Number | R/m | iG | Number | R/m | iG | Number | R/m | iG |
|---|---|---|---|---|---|---|---|---|
| 1 | 270 | 0 | 4 | 400 | 0 | 7 | 600 | 0 |
| 2 | 270 | −0.03 | 5 | 400 | –0.03 | 8 | 600 | –0.03 |
| 3 | 270 | –0.05 | 6 | 400 | –0.05 | 9 | 600 | −0.05 |
| R/m | ax∈[0, −1] | ax∈[−1, −3.4] | ax∈[−3.4, −4.5] | ax∈[−4.5, −6] |
|---|---|---|---|---|
| 270 | −0.0621 (−0.0157) | −0.1535 (−0.0232) | −0.2623 (−0.0422) | −0.4261 (−0.0517) |
| 400 | −0.0203 (−0.0059) | −0.0466 (−0.0094) | −0.0748 (−0.0156) | −0.1009 (−0.0182) |
| 600 | −0.0040 (−0.0009) | −0.0096 (−0.0008) | −0.0145 (−0.0026) | −0.0171 (−0.0028) |
| R/m | LC_A | LC_B | ||
|---|---|---|---|---|
| LCD∈[6, 4] | LCD ∈[4, 2] | LCD∈[6, 4] | LCD ∈[4, 2] | |
| 270 | −0.2698 (−0.0382) | −1.5783 (−0.1911) | −0.2851 (−0.0373) | −1.5306 (−0.1760) |
| 400 | −0.1673 (−0.0356) | −1.0099 (−0.1811) | −0.1779 (−0.0349) | −0.9954 (−0.1692) |
| 600 | −0.1315 (−0.0331) | −0.8066 (−0.1749) | −0.1406 (−0.0334) | −0.8012 (−0.1648) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Lv, W.; Gao, C.; Bi, Y.; Mu, M.; E, G. Why Do Drivers’ Collision Avoidance Maneuvers Tend to Cause SUVs to Sideslip or Rollover on Horizontal Curve and Grade Combinations?—An Analysis of the Causes Based on a Modified Multibody Dynamics Model. Int. J. Environ. Res. Public Health 2022, 19, 15877. https://doi.org/10.3390/ijerph192315877
Xu J, Lv W, Gao C, Bi Y, Mu M, E G. Why Do Drivers’ Collision Avoidance Maneuvers Tend to Cause SUVs to Sideslip or Rollover on Horizontal Curve and Grade Combinations?—An Analysis of the Causes Based on a Modified Multibody Dynamics Model. International Journal of Environmental Research and Public Health. 2022; 19(23):15877. https://doi.org/10.3390/ijerph192315877
Chicago/Turabian StyleXu, Jinliang, Wenzhen Lv, Chao Gao, Yufeng Bi, Minghao Mu, and Guangxun E. 2022. "Why Do Drivers’ Collision Avoidance Maneuvers Tend to Cause SUVs to Sideslip or Rollover on Horizontal Curve and Grade Combinations?—An Analysis of the Causes Based on a Modified Multibody Dynamics Model" International Journal of Environmental Research and Public Health 19, no. 23: 15877. https://doi.org/10.3390/ijerph192315877
APA StyleXu, J., Lv, W., Gao, C., Bi, Y., Mu, M., & E, G. (2022). Why Do Drivers’ Collision Avoidance Maneuvers Tend to Cause SUVs to Sideslip or Rollover on Horizontal Curve and Grade Combinations?—An Analysis of the Causes Based on a Modified Multibody Dynamics Model. International Journal of Environmental Research and Public Health, 19(23), 15877. https://doi.org/10.3390/ijerph192315877