
Two-Step k-means Clustering Based Information Entropy for Detecting Environmental Barriers Using Wearable Sensor


Abstract
:1. Introduction
2. Methodology
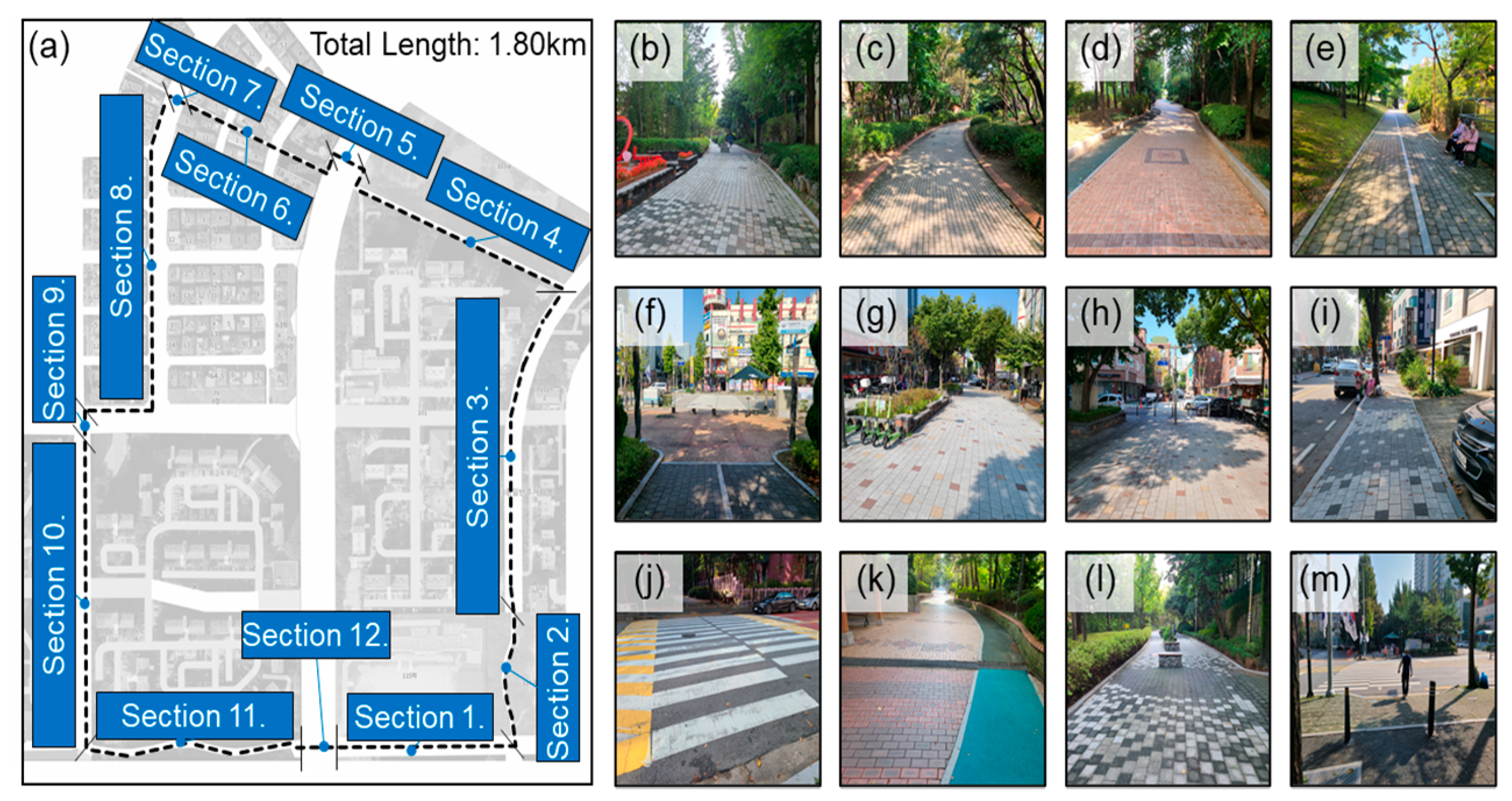
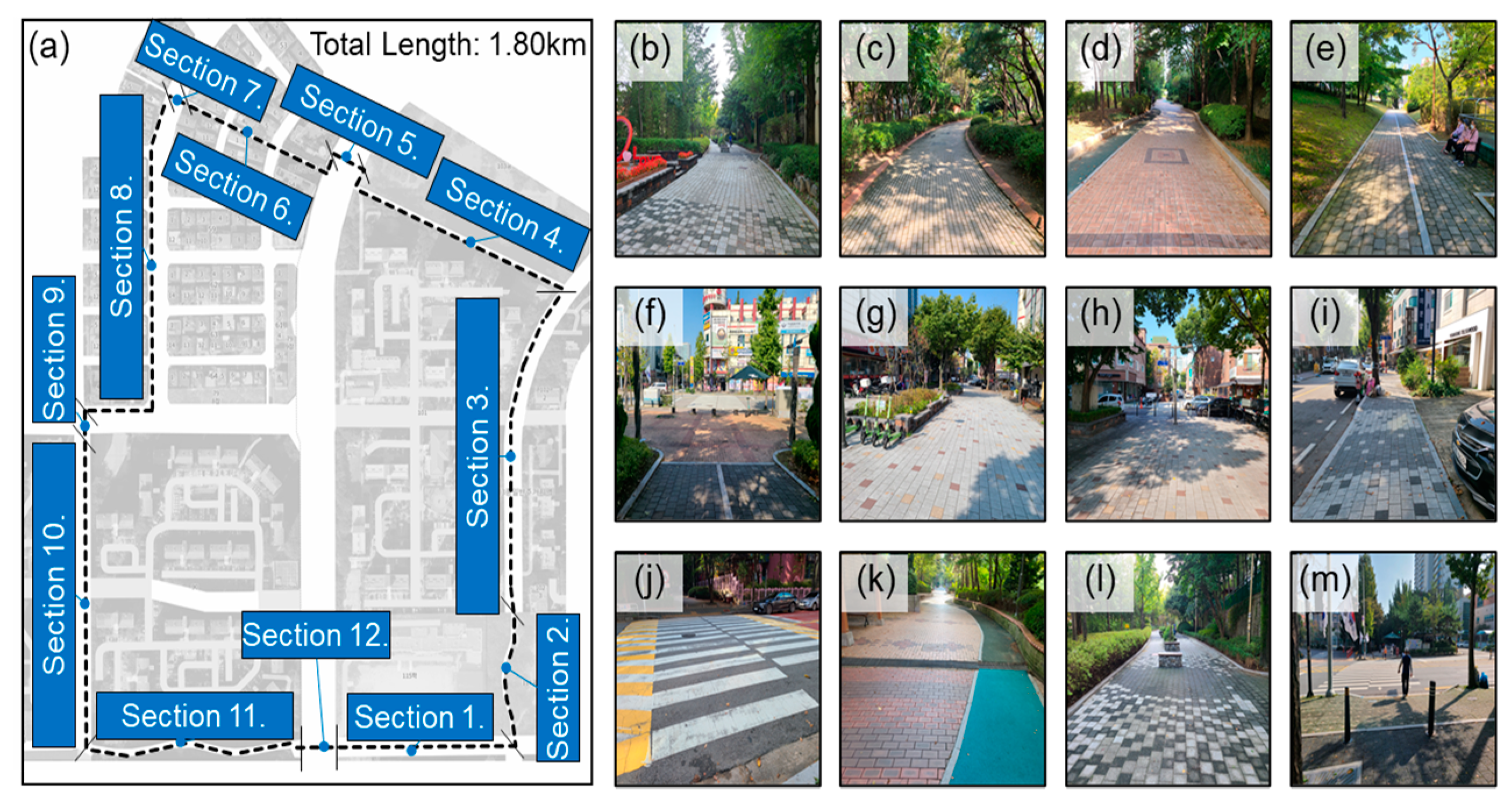
2.1. Experimental Design
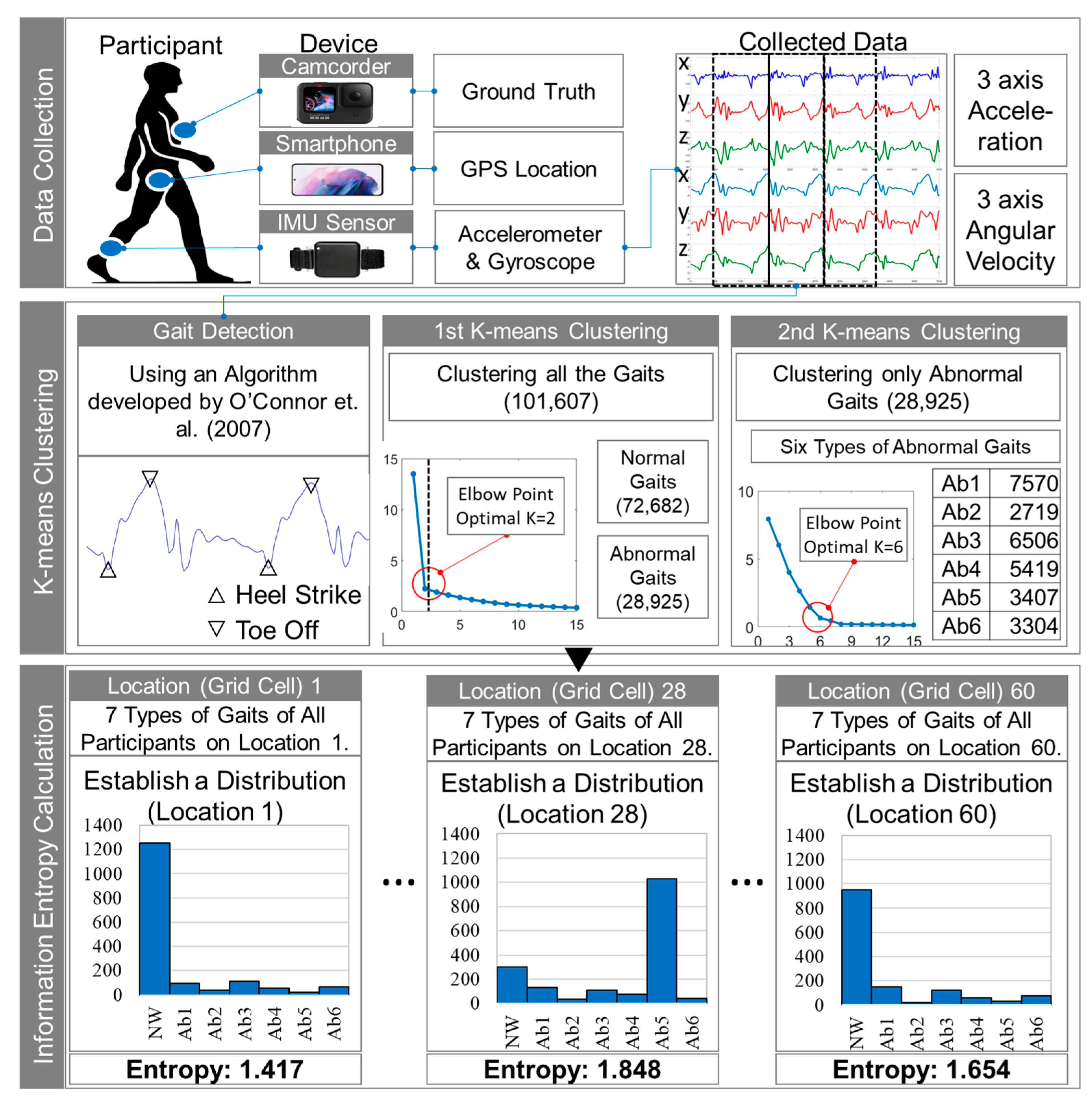
2.2. Research Framework
2.3. Calculation Process of Information Entropy by Location
3. Results
3.1. Environmental Barriers Identified by Participants’ Expression: Ground Truth
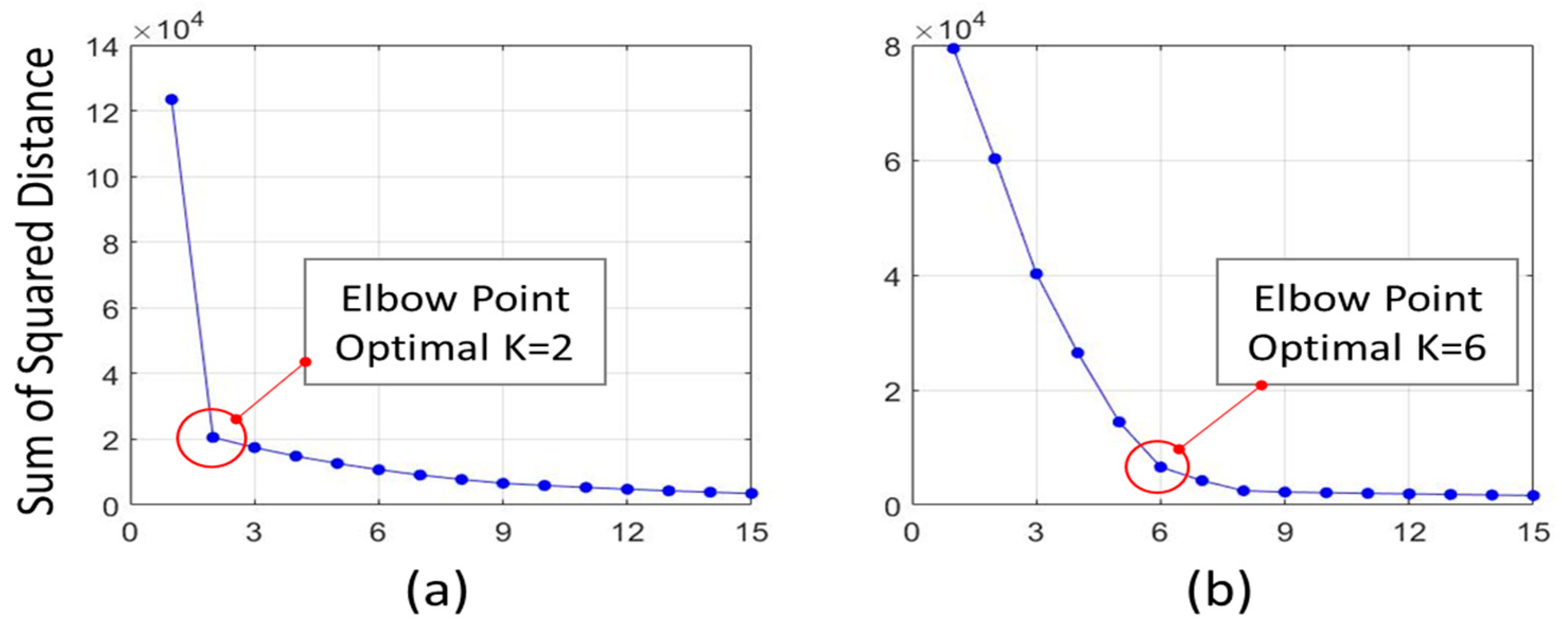
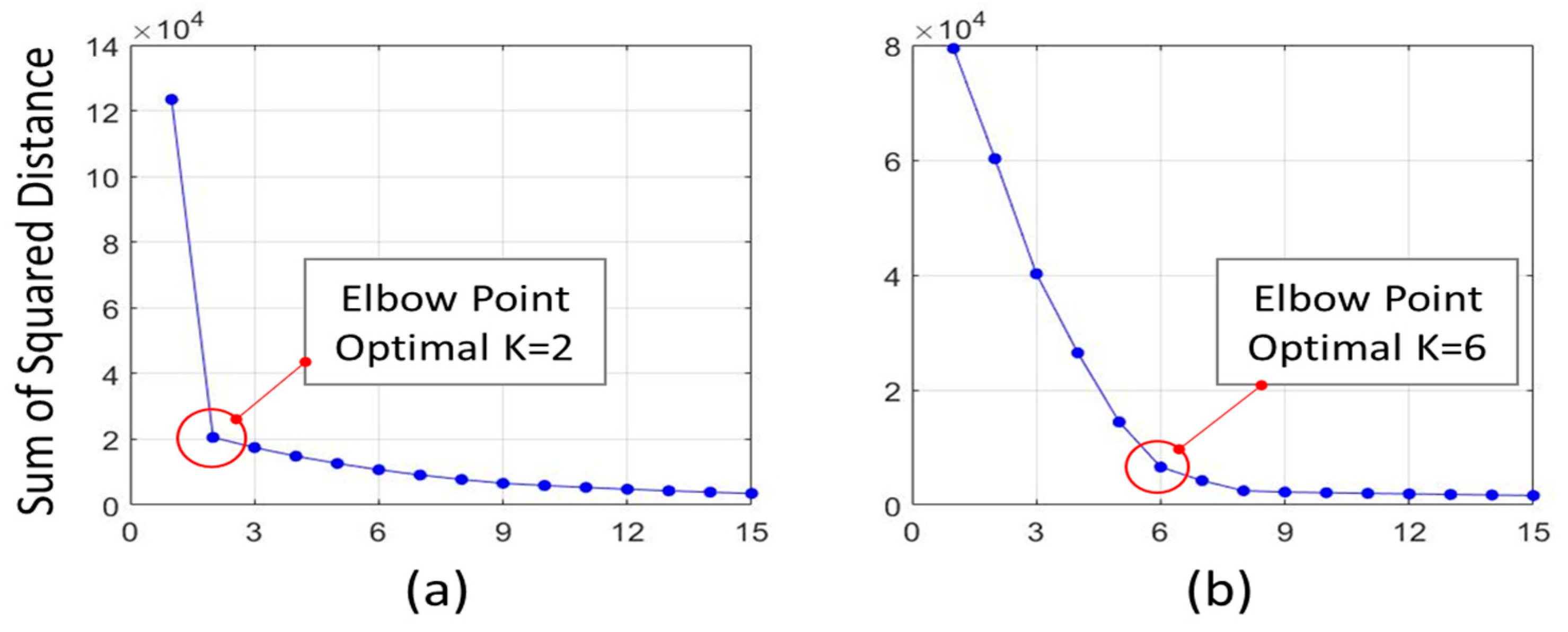
3.2. Two-Step k-means Clustering Results
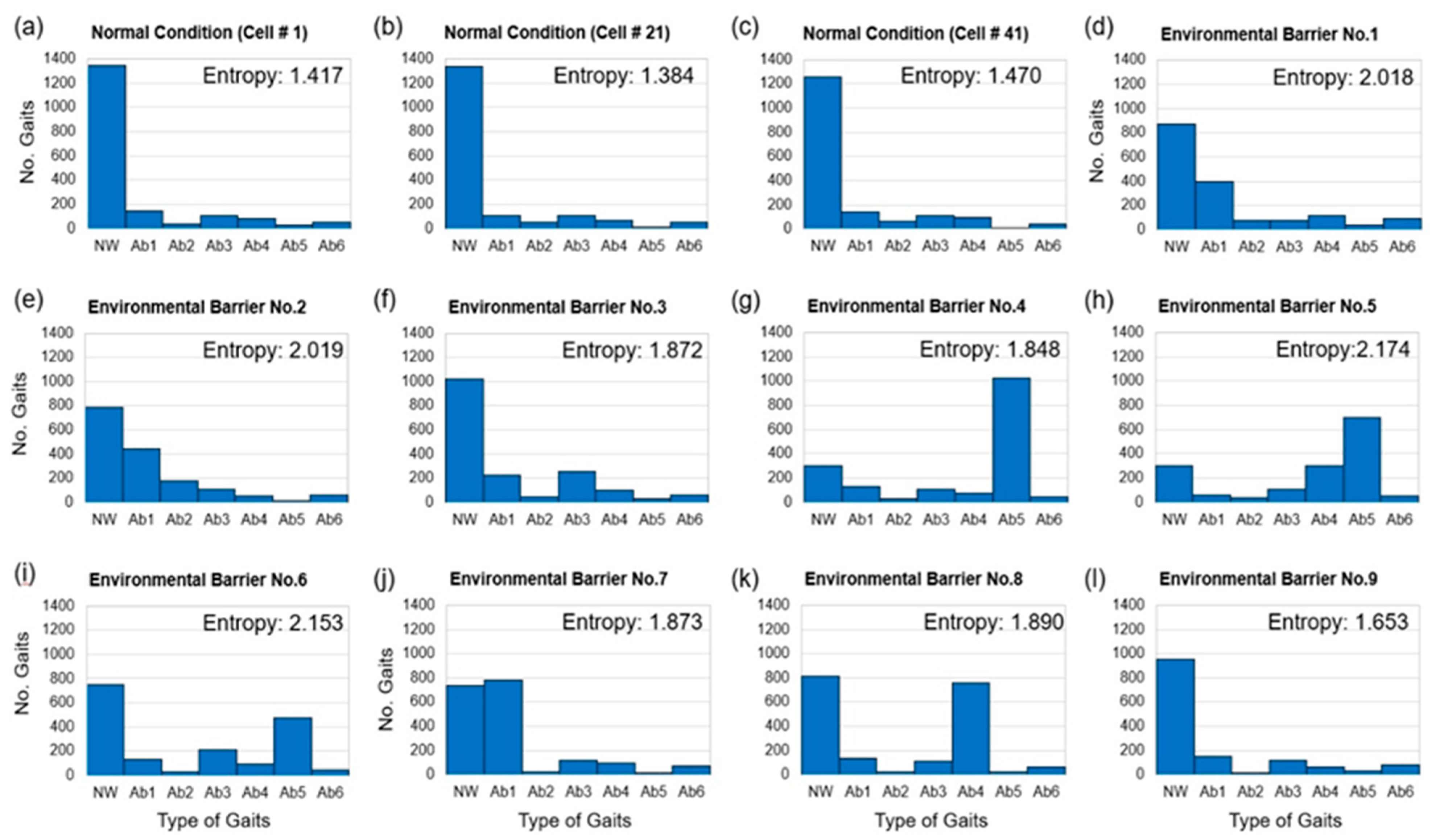
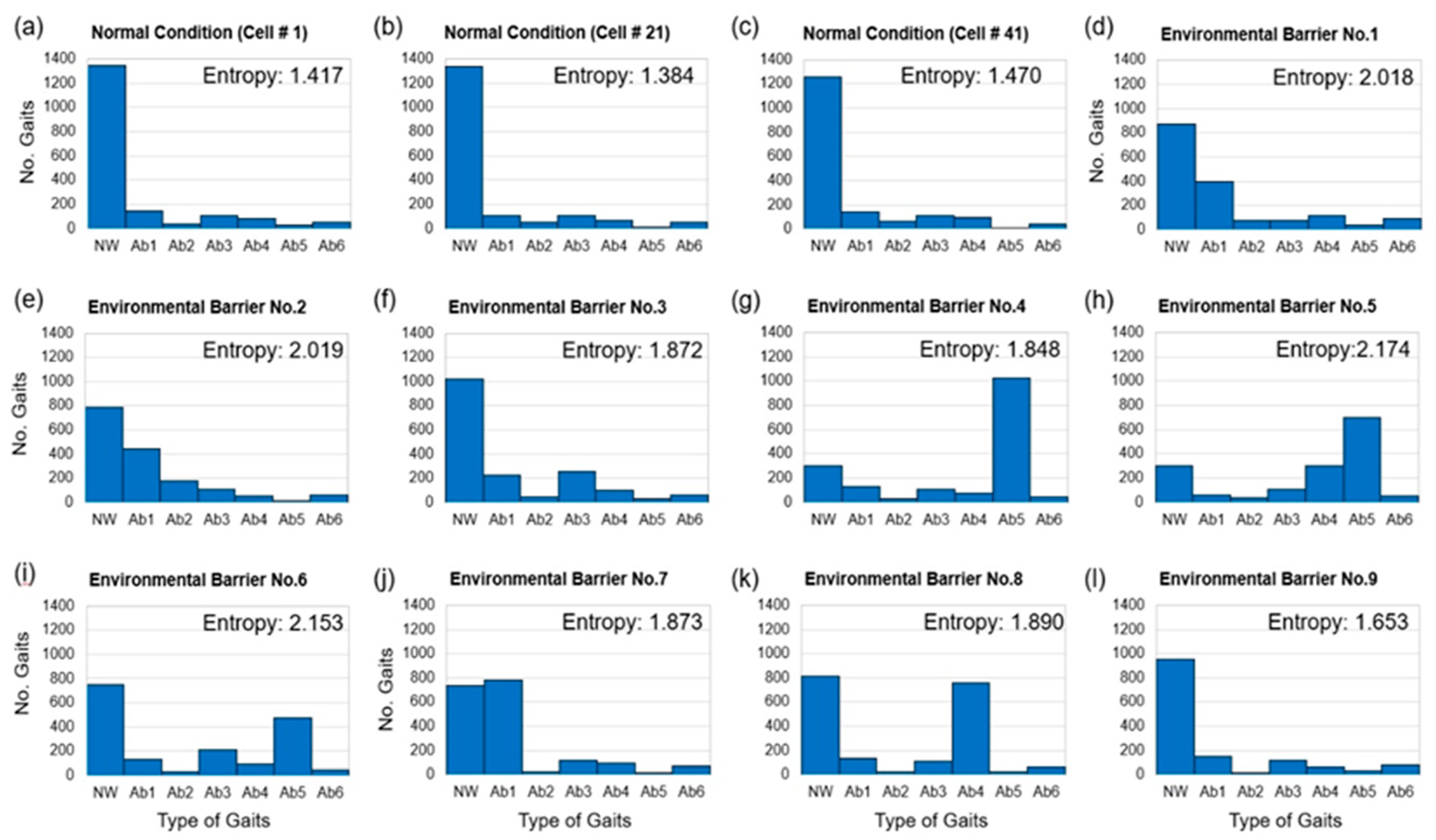
3.3. Comparison of Distribution by Cells with/without an Environmental Barrier
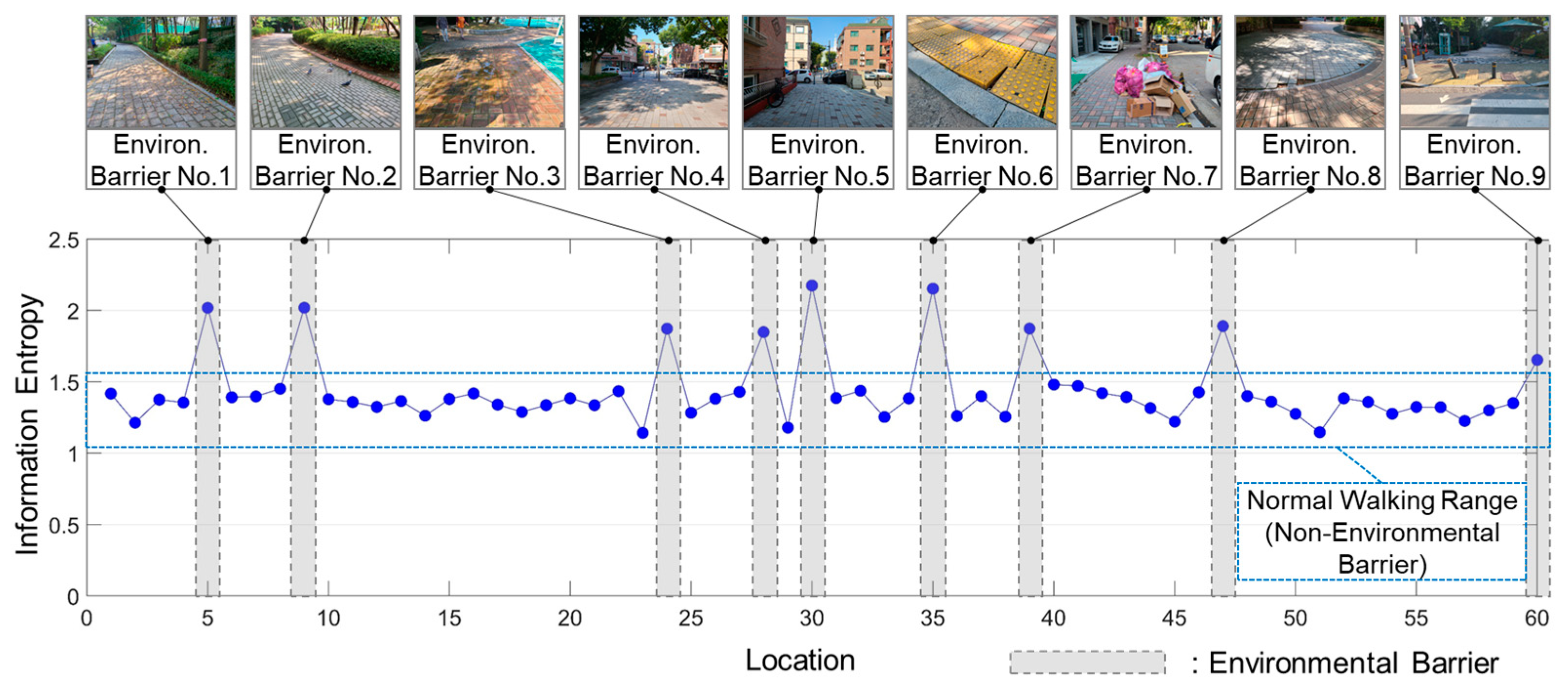
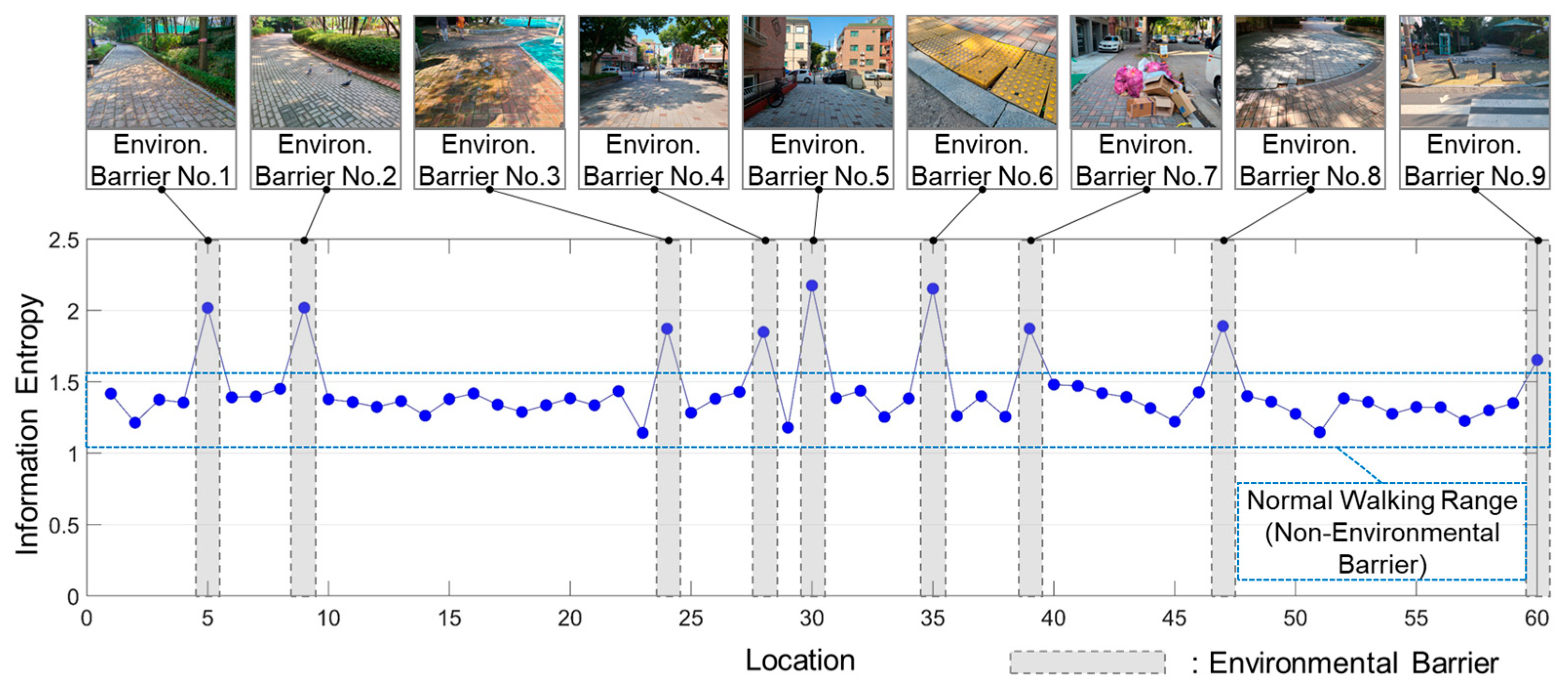
3.4. Information Entropy Values by Location
4. Discussion
4.1. Contributions of the Suggested Method
4.2. Future Applications and Benefits of the Suggested Method
4.3. Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bell, S.L.; Audrey, S.; Gunnell, D.; Cooper, A.; Campbell, R. The Relationship between Physical Activity, Mental Wellbeing and Symptoms of Mental Health Disorder in Adolescents: A Cohort Study. Int. J. Behav. Nutr. Phys. Act. 2019, 16, 138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nielsen, J.B. How We Walk: Central Control of Muscle Activity during Human Walking. Neuroscientist 2003, 9, 195–204. [Google Scholar] [CrossRef]
- Nilsson, J.; Thorstensson, A.; Halbertsma, J.N. Changes in Leg Movements and Muscle Activity with Speed of Locomotion and Mode of Progression in Humans. Acta Physiol. Scand. 1985, 123, 457–475. [Google Scholar] [CrossRef] [PubMed]
- Michael, M. These Boots Are Made for Walking...: Mundane Technology, the Body and Human-Environment Relations. Body Soc. 2000, 6, 107–126. [Google Scholar] [CrossRef]
- Zhang, K.; de Silva, C.W.; Fu, C. Sensor Fusion for Predictive Control of Human-Prosthesis-Environment Dynamics in Assistive Walking: A Survey. arXiv 2019, arXiv:1903.07674. [Google Scholar]
- Matos Wunderlich, F. Walking and Rhythmicity: Sensing Urban Space. J. Urban Des. 2008, 13, 125–139. [Google Scholar] [CrossRef]
- Gauvin, L.; Richard, L.; Kestens, Y.; Shatenstein, B.; Daniel, M.; Moore, S.D.; Mercille, G.; Payette, H. Living in a Well-Serviced Urban Area Is Associated with Maintenance of Frequent Walking among Seniors in the VoisiNuAge Study. J. Gerontol. Ser. B Psychol. Sci. Soc. Sci. 2012, 67, 76–88. [Google Scholar] [CrossRef] [Green Version]
- Jeong, D.Y.; Han, S.H.; Kwahk, J.; Park, J.; Lee, M.; Park, K.; Kim, J.H.; Jang, H.; Jeong, D. B3-2 Suggesting Pedestrian Experience Principles of the Mobility Handicapped. Jpn. J. Ergon. 2017, 53, S412–S415. [Google Scholar] [CrossRef] [Green Version]
- Forsyth, A. What Is a Walkable Place? The Walkability Debate in Urban Design. Urban Des. Int. 2015, 20, 274–292. [Google Scholar] [CrossRef]
- Ewing, R.; Handy, S. Measuring the Unmeasurable: Urban Design Qualities Related to Walkability. J. Urban Des. 2009, 14, 65–84. [Google Scholar] [CrossRef]
- Lee, G.; Choi, B.; Jebelli, H.; Ahn, C.R.; Lee, S. Wearable Biosensor and Collective Sensing–Based Approach for Detecting Older Adults’ Environmental Barriers. J. Comput. Civ. Eng. 2020, 34, 04020002. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, C.R.; Yang, K. A People-Centric Sensing Approach to Detecting Sidewalk Defects. Adv. Eng. Inform. 2016, 30, 660–671. [Google Scholar] [CrossRef] [Green Version]
- Dawson, J.; Hillsdon, M.; Boller, I.; Foster, C. Perceived Barriers to Walking in the Neighborhood Environment: A Survey of Middle-Aged and Older Adults. J. Aging Phys. Act. 2007, 15, 318–335. [Google Scholar] [CrossRef]
- Lockett, D.; Willis, A.; Edwards, N. Through Seniors’ Eyes: An Exploratory Qualitative Study to Identify Environmental Barriers to and Facilitators of Walking. Can. J. Nurs. Res. Arch. 2005, 37, 48–65. [Google Scholar]
- Salmon, J.; Salmon, L.; Crawford, D.A.; Hume, C.; Timperio, A. Associations among Individual, Social, and Environmental Barriers and Children’s Walking or Cycling to School. Am. J. Health Promot. 2007, 22, 107–113. [Google Scholar] [CrossRef]
- Li, C.; Chi, G.; Jackson, R. Perceptions and Barriers to Walking in the Rural South of the United States: The Influence of Neighborhood Built Environment on Pedestrian Behaviors. Urban Des. Int. 2015, 20, 255–273. [Google Scholar] [CrossRef]
- Yoon, J.; Chun, J.; Kim, H. Investigating the Relation between Walkability and the Changes in Pedestrian Policy through Wearable Sensing. Sustainability 2020, 12, 10447. [Google Scholar] [CrossRef]
- Kim, B.; Yoo, M.; Park, K.C.; Lee, K.R.; Kim, J.H. A Value of Civic Voices for Smart City: A Big Data Analysis of Civic Queries Posed by Seoul Citizens. Cities 2021, 108, 102941. [Google Scholar] [CrossRef]
- Bereitschaft, B. Walk Score® versus Residents’ Perceptions of Walkability in Omaha, NE. J. Urban. Int. Res. Placemaking Urban Sustain. 2018, 11, 412–435. [Google Scholar] [CrossRef]
- Deehr, R.C.; Shumann, A. Active Seattle: Achieving Walkability in Diverse Neighborhoods. Am. J. Prev. Med. 2009, 37, S403–S411. [Google Scholar] [CrossRef]
- Battista, G.A.; Manaugh, K. Using Embodied Videos of Walking Interviews in Walkability Assessment. Transp. Res. Rec. 2017, 2661, 12–18. [Google Scholar] [CrossRef]
- Resch, B.; Puetz, I.; Bluemke, M.; Kyriakou, K.; Miksch, J. An Interdisciplinary Mixed-Methods Approach to Analyzing Urban Spaces: The Case of Urban Walkability and Bikeability. Int. J. Environ. Res. Public Health 2020, 17, 6994. [Google Scholar] [CrossRef]
- Lee, G.; Choi, B.; Ahn, C.R.; Lee, S. Wearable Biosensor and Hotspot Analysis–Based Framework to Detect Stress Hotspots for Advancing Elderly’s Mobility. J. Manag. Eng. 2020, 36, 04020010. [Google Scholar] [CrossRef]
- Feldstein, L.M. Policy and Legislation for Healthy Places. In Making Healthy Places; Springer: Washington, DC, USA, 2011; pp. 271–286. [Google Scholar]
- Heinrich, K.M.; Stephen, M.O.; Vaughan, K.B.; Kellogg, M. Kansas Legislators Prioritize Obesity but Overlook Nutrition and Physical Activity Issues. J. Public Health Manag. Pract. 2013, 19, 139–145. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Campbell, A.T.; Eisenman, S.B.; Lane, N.D.; Miluzzo, E.; Peterson, R.A.; Lu, H.; Zheng, X.; Musolesi, M.; Fodor, K.; Ahn, G.-S. The Rise of People-Centric Sensing. IEEE Internet Comput. 2008, 12, 12–21. [Google Scholar] [CrossRef]
- Campbell, A.T.; Eisenman, S.B.; Lane, N.D.; Miluzzo, E.; Peterson, R.A. People-Centric Urban Sensing. In Proceedings of the 2nd Annual International Workshop on Wireless Internet, Boston, MA, USA, 2–5 August 2006; Association for Computing Machinery: New York, NY, USA, 2006; p. 18-es. [Google Scholar]
- Hussain, A.; Wenbi, R.; da Silva, A.L.; Nadher, M.; Mudhish, M. Health and Emergency-Care Platform for the Elderly and Disabled People in the Smart City. J. Syst. Softw. 2015, 110, 253–263. [Google Scholar] [CrossRef]
- Lu, H.; Pan, W.; Lane, N.D.; Choudhury, T.; Campbell, A.T. SoundSense: Scalable Sound Sensing for People-Centric Applications on Mobile Phones. In Proceedings of the 7th International Conference on Mobile Systems, Applications, and Services, Kraków, Poland, 22–25 June 2009; Association for Computing Machinery: New York, NY, USA, 2009; pp. 165–178. [Google Scholar]
- Sofia, R.; Firdose, S.; Lopes, L.A.; Moreira, W.; Mendes, P. NSense: A People-Centric, Non-Intrusive Opportunistic Sensing Tool for Contextualizing Nearness. In Proceedings of the 2016 IEEE 18th International Conference on e-Health Networking, Applications and Services (Healthcom), Munich, Germany, 14–17 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Higashino, T.; Uchiyama, A. A Study for Human Centric Cyber Physical System Based Sensing–toward Safe and Secure Urban Life–. In Proceedings of the International Workshop on Information Search, Integration, and Personalization, Sapporo, Japan, 11–13 October 2012; Springer: Berlin, Heidelberg, 2012; pp. 61–70. [Google Scholar]
- Bayındır, L. A Survey of People-Centric Sensing Studies Utilizing Mobile Phone Sensors. J. Ambient Intell. Smart Environ. 2017, 9, 421–448. [Google Scholar] [CrossRef]
- Jansi, K.R.; Sandhia, G.K.; KasmirRaja, S.V. A Reliable Cloud Based Framework for Large Scale Urban Sensing Systems. In Smart Intelligent Computing and Communication Technology; IOS Press: Amsterdam, The Netherlands, 2021; pp. 67–72. [Google Scholar]
- Zeile, P. Defining and Assessing Walkability: A Concept for an Integrated Approach Using Surveys, Biosensors and Geospatial Analysis. Urban Dev. Issues 2019, 62, 5–15. [Google Scholar]
- Ahn, C.; Ham, Y.; Kim, J.; Kim, J. A Digital Twin City Model for Age-Friendly Communities: Capturing Environmental Distress from Multimodal Sensory Data. In Proceedings of the 53rd Hawaii International Conference on System Sciences, Maui, HI, USA, 7–10 January 2020. [Google Scholar]
- Kim, J.; Yadav, M.; Chaspari, T.; Ahn, C.R. Saliency Detection Analysis of Collective Physiological Responses of Pedestrians to Evaluate Neighborhood Built Environments. Adv. Eng. Inform. 2020, 43, 101035. [Google Scholar] [CrossRef]
- Zanwar, P.; Kim, J.; Kim, J.; Manser, M.; Ham, Y.; Chaspari, T.; Ahn, C.R. Use of Connected Technologies to Assess Barriers and Stressors for Age and Disability-Friendly Communities. Front. Public Health 2021, 9, 578832. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, C.R.; Yang, K. Identifying Safety Hazards Using Collective Bodily Responses of Workers. J. Constr. Eng. Manag. 2017, 143, 04016090. [Google Scholar] [CrossRef]
- Kim, H. Wearable Sensor Data-Driven Walkability Assessment for Elderly People. Sustainability 2020, 12, 4041. [Google Scholar] [CrossRef]
- Leão, A.L.F.; Abonizio, H.Q.; Reis, R.S.; Kanashiro, M. Walkability Variables: An Empirical Study in Rolândia-PR, Brazil. Ambiente Construído 2020, 20, 475–488. [Google Scholar] [CrossRef]
- Tan, Y.Z.; Wu, C.F. The Laws of the Information Entropy Values of Land Use Composition. J. Nat. Resour. 2003, 18, 112–117. [Google Scholar]
- Zhao, J.; XU, J.; MEI, A.; WU, J.; ZHOU, J. A Study on the Information Entropy and Fractal Dimension of Land Use Structure and Form in Shanghai. Geogr. Res. 2004, 2, 137–146. [Google Scholar]
- Li, C.; Zhang, F.; Zhu, T.; Feng, T.; An, P. Evaluation and Correlation Analysis of Land Use Performance Based on Entropy-Weight TOPSIS Method. Trans. Chin. Soc. Agric. Eng. 2013, 29, 217–227. [Google Scholar]
- Zhang, X.; Yu, Q.; Wang, Y. Fuzzy Evaluation of Crowd Safety Based on Pedestrians’ Number and Distribution Entropy. Entropy 2020, 22, 832. [Google Scholar] [CrossRef]
- Procházka, J.; Olševičová, K. Monitoring Lane Formation of Pedestrians: Emergence and Entropy. In Proceedings of the Asian Conference on Intelligent Information and Database Systems, Bali, Indonesia, 23–25 March 2015; Springer: Cham, Switzerland, 2015; pp. 221–228. [Google Scholar]
- Rangel-Huerta, A.; Ballinas-Hernández, A.L.; Muñoz-Meléndez, A. An Entropy Model to Measure Heterogeneity of Pedestrian Crowds Using Self-Propelled Agents. Phys. A Stat. Mech. Its Appl. 2017, 473, 213–224. [Google Scholar] [CrossRef]
- Tageldin, A.; Zaki, M.H.; Sayed, T. Examining Pedestrian Evasive Actions as a Potential Indicator for Traffic Conflicts. IET Intell. Transp. Syst. 2017, 11, 282–289. [Google Scholar] [CrossRef]
- Qiao, Z.; Zhao, L.; Gu, L.; Jiang, X.; Li, R.; Ge, L. Research on Abnormal Pedestrian Trajectory Detection of Dynamic Crowds in Public Scenarios. IEEE Sens. J. 2021, 21, 23046–23054. [Google Scholar] [CrossRef]
- O’Connor, C.M.; Thorpe, S.K.; O’Malley, M.J.; Vaughan, C.L. Automatic Detection of Gait Events Using Kinematic Data. Gait Posture 2007, 25, 469–474. [Google Scholar] [CrossRef]
- Zmeskal, O.; Dzik, P.; Vesely, M. Entropy of Fractal Systems. Comput. Math. Appl. 2013, 66, 135–146. [Google Scholar] [CrossRef]
- Hirsh, J.B.; Mar, R.A.; Peterson, J.B. Psychological Entropy: A Framework for Understanding Uncertainty-Related Anxiety. Psychol. Rev. 2012, 119, 304. [Google Scholar] [CrossRef] [Green Version]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- Bobko, P. Correlation and Regression: Applications for Industrial Organizational Psychology and Management; Sage Publications: Newbury Park, CA, USA, 2001. [Google Scholar]
- Holley, J.W.; Berhagen, K.-E. A Note on the Use of the Point Biserial Correlation Coefficient; Lund University: Lund, Sweden, 1969. [Google Scholar]
- Yang, K.; Ahn, C.R. Inferring Workplace Safety Hazards from the Spatial Patterns of Workers’ Wearable Data. Adv. Eng. Inform. 2019, 41, 100924. [Google Scholar] [CrossRef]
- Lee, B.; Hwang, S.; Kim, H. The Feasibility of Information-Entropy-Based Behavioral Analysis for Detecting Environmental Barriers. Int. J. Environ. Res. Public Health 2021, 18, 11727. [Google Scholar] [CrossRef] [PubMed]
- Lane, N.D.; Eisenman, S.B.; Musolesi, M.; Miluzzo, E.; Campbell, A.T. Urban Sensing Systems: Opportunistic or Participatory? In Proceedings of the 9th Workshop on Mobile Computing Systems and Applications, Napa Valley, CA, USA, 25–26 February 2008; ACM: Singapore, 2008; pp. 11–16. [Google Scholar]
- Moreira, W.; Mendes, P. Pervasive Data Sharing as an Enabler for Mobile Citizen Sensing Systems. Commun. Mag. IEEE 2015, 53, 164–170. [Google Scholar] [CrossRef]
- Iwarsson, S.; Nygren, C.; Oswald, F.; Wahl, H.-W.; Tomsone, S. Environmental Barriers and Housing Accessibility Problems over a One-Year Period in Later Life in Three European Countries. J. Hous. Elder. 2006, 20, 23–43. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section Number | Description | Length (m) | Avg. Width (m) |
|---|---|---|---|
| 1 | Well-maintained sidewalk blocks Slight uphill road | 171 | 4.8 |
| 2 | Well-maintained sidewalk blocks installed for over 10 years | 118 | 2.4 |
| 3 | Well-maintained sidewalk blocks Slight downhill | 275 | 4.5 |
| 4 | Well-maintained sidewalk blocks in a park installed for over 10 years | 219 | 2.6 |
| 5 | Crossing on a six-lane road (with traffic lights) | 26 | 4.8 |
| 6 | Well-maintained sidewalk blocks Crossings on two-lane roads (no traffic lights) | 114 | 6.2 |
| 7 | Crossings on four-lane roads (no traffic lights) | 11 | 8 |
| 8 | Mixed residential and commercial spaces Illegal parking and piled materials on sidewalks | 324 | 1.8 |
| 9 | Crossings on four-lane roads (with traffic lights) | 13 | 8 |
| 10 | Well-maintained sidewalks and surrounding facilities | 274 | 4.8 |
| 11 | Well-maintained sidewalks and surrounding facilities | 231 | 4.8 |
| 12 | Crossing on a six-lane road (with traffic lights) | 26 | 4.8 |
| Age | Male | Female | Total |
|---|---|---|---|
| 20 s–30 s | 16 | 13 | 29 |
| 40 s–50 s | 8 | 8 | 16 |
| Over 60 s | 10 | 7 | 17 |
| Total | 34 | 28 | 64 |
| Gait Type | Number of Gaits | Mean of Normalized SVM of Acceleration | Mean of Normalized SVM of Angular Velocity |
|---|---|---|---|
| Normal Gait | 72,682 | Moderate | Moderate |
| Abnormal Gait 1 | 7570 | Low | Low |
| Abnormal Gait 2 | 2719 | Low | High |
| Abnormal Gait 3 | 6506 | High | Very High |
| Abnormal Gait 4 | 5419 | Very High | High |
| Abnormal Gait 5 | 3407 | High | Low |
| Abnormal Gait 6 | 3304 | Very Low | Very Low |
| p-Value | NC | EB1 | EB2 | EB3 | EB4 | EB5 | EB6 | EB7 | EB8 | EB9 |
|---|---|---|---|---|---|---|---|---|---|---|
| NC | - | - | - | - | - | - | - | - | - | - |
| EB1 | <0.001 | - | - | - | - | - | - | - | - | - |
| EB2 | <0.001 | 0.079 | - | - | - | - | - | - | - | - |
| EB3 | <0.001 | <0.001 | <0.001 | - | - | - | - | - | - | - |
| EB4 | <0.001 | <0.001 | <0.001 | <0.001 | - | - | - | - | - | - |
| EB5 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | - | - | - | - | - |
| EB6 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | - | - | - | - |
| EB7 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | - | - | - |
| EB8 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | - | - |
| EB9 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, B.; Kim, H. Two-Step k-means Clustering Based Information Entropy for Detecting Environmental Barriers Using Wearable Sensor. Int. J. Environ. Res. Public Health 2022, 19, 704. https://doi.org/10.3390/ijerph19020704
Lee B, Kim H. Two-Step k-means Clustering Based Information Entropy for Detecting Environmental Barriers Using Wearable Sensor. International Journal of Environmental Research and Public Health. 2022; 19(2):704. https://doi.org/10.3390/ijerph19020704
Chicago/Turabian StyleLee, Bogyeong, and Hyunsoo Kim. 2022. "Two-Step k-means Clustering Based Information Entropy for Detecting Environmental Barriers Using Wearable Sensor" International Journal of Environmental Research and Public Health 19, no. 2: 704. https://doi.org/10.3390/ijerph19020704
APA StyleLee, B., & Kim, H. (2022). Two-Step k-means Clustering Based Information Entropy for Detecting Environmental Barriers Using Wearable Sensor. International Journal of Environmental Research and Public Health, 19(2), 704. https://doi.org/10.3390/ijerph19020704