1. Introduction
With the rapid growth of the population and the rapid development of medical technology, the volume and composition of medical waste have grown rapidly over the past 30 years [
1]. Especially since the outbreak of COVID-19 in early 2020, the amount of medical waste generated has increased dramatically [
2]. For example, the amount of medical waste generated in Wuhan, China has increased from 40 tons/day before the epidemic to 110–150 tons/day [
3], and the peak value was as high as 240 tons/day [
4]. However, the gap between the production and disposal of medical waste is widening. Hence, the urgency of developing urban medical waste recycling is heightened [
5]. Effective recycling of medical waste can prevent the spread of disease, reduce environmental pollution, and promote resource recycling [
6]. Therefore, how to effectively recycle medical waste has become a hot issue for the people as well as the government [
7]. The majority of medical waste is collected and disposed of centrally, and the transportation procedure is subject to stringent rules, including restrictions on the vehicle’s weight, the operating window, and other factors [
8]. In addition, how to develop an environmentally conscious transportation network and reduce the carbon tax generated during the transportation of goods has also become one of the key issues [
9]. Therefore, it is necessary for medical waste recycling to set up a rational and scientific path for recycling given these constraints.
The medical waste recycling problem can be regarded as a general situation of the vehicle routing problem with time windows (VRPTW), which is proved to be NP-hard [
10]. Therefore, most of the current literature explores some efficient heuristic algorithms for the solution of VRPTW. Aylin et al. [
11] investigated the medical waste recycling vehicle routing problem of Istanbul and comprehensively considered the factors of the recycling points, treatment points, transport vehicles, etc., so as to improve and optimize the recycling route of the medical waste and eventually determine the most feasible routes from the perspective of efficiency and economy. RFID technology was used by Nolz et al. [
12] to optimize the planning process of predefined time horizons. Meanwhile, for the purpose of handling the randomness of the problem, adaptive large neighborhood search-based algorithms were also used to obtain the final vehicle route. Hachicha et al. [
13] investigated the transport problem of medical waste from 12 hospitals in Tunisia. They considered it a route optimization problem and integrated the contagiousness of medical waste into load constraints. The real cases were then solved by interactive optimizer tool CPLEX. Mete et al. [
14] proposed a geographic information system (GIS) solution approach to determine the optimal location of disposal centers, and the proposed approach was applied to minimize the total distance as well as the total risk during the transport of medical waste between 167 health facilities (collection centers) and five scheduled disposal centers through the TRB1 region of Turkey. Nikzamir et al. [
15] proposed a bi-objective mixed-integer mathematical model for the transport of infectious and non-infectious medical waste problems by considering the factor of stochastic contamination emissions during the transport of infectious waste. Accordingly, a multi-objective class water flow algorithm with novel operators was developed to solve the problem, and the algorithm was thoroughly compared with the other algorithms. For the household expired medicine recycling vehicle routing problem, a traditional genetic algorithm was used by Wang [
16] to improve the recycling rate. Vijayakumar et al. [
17] focused on the bio-medical waste collection problem in Coimbatore, and the particle swarm optimization algorithm (PSO) was used to solve the mathematical model to minimize the total collection time. The safety score was applied by Eren et al. [
4] to establish a linear programming model with two objective functions based on the safety score and the total transport distance. The model was then solved, and a mediation solution was obtained to determine the safest and shortest transport route for medical waste vehicles. Amirhossein et al. [
18] proposed a novel waste management approach in real time by utilizing modern traceability devices of the Internet of Things (IoT), designed a two-stage system efficiently, and innovated the collection route in order to maximize the recycling value and achieve sustainable development. Due to home healthcare services and their associated demand rates increasing dramatically, Amin et al. [
19] designed a home health care system based on the Internet of Things (IoT) and developed a two-step modeling approach to select a number of employed vehicles. Moreover, the green split pick-up vehicle routing problem (GSPVRP) and IoT concept are employed to address the patients in both sub-models. For the sake of solving the optimization problem of urban waste collection and transportation in China, Wu et al. [
20] considered a green vehicle routing problem (PCGVRP) model in a waste management system, and the optimal solution is obtained by a local search hybrid algorithm (LSHA), and several instances are selected from the capacitated vehicle routing problem (CVRP) database so as to test and verify the effectiveness of the proposed LSHA algorithm. The literature survey has shown that a limited number of studies use vehicle routing models for solving the medical waste recycling problem, and there is also a lack of policy consideration regarding that medical waste must be fully recycled within 48 h [
21]. There is no difference between the model of the existing research and the general network optimization model, so it is far away from the realistic background of medical waste recycling and does not reflect the characteristics of the medical waste recycling problem. How to serve specific medical institutions during specific time periods is the first question that needs to be addressed [
22].
The periodic vehicle routing problem (PVRP) is a temporal extension of the VRP, first proposed by Beltrami and Bodin [
23]. In PVRP, the optimal route is composed of different lines in multiple cycles, and customers need to visit multiple times during the cycle or have different requirements for the frequency of return visits [
24], such as supermarket delivery, elevator maintenance, garbage collection, and letter delivery services [
25]. Scholars have been looking for efficient methods to find the optimal solution or approximate optimal solution in the cycle, mainly including exact algorithm [
26,
27], heuristic algorithm [
28,
29], meta-heuristic algorithm, machine learning algorithm [
30,
31,
32], and some more mature commercial software [
33]. Compared with other algorithms, the meta-heuristic algorithm has a more comprehensive and thorough search process, which greatly improves the goodness of the solution and approximately solves a wide range of hard optimization problems without having to deeply adapt to each problem [
34,
35]. With these advantages, metaheuristic algorithms can be used to solve nonlinear, large-scale combinatorial optimization problems, covering engineering fields such as computers, automation, electronics, and intelligent robotics [
36]. Therefore, scholars have generated rich research results in this neighborhood. For example, Hemmelmayr et al. [
37] studied the problem of waste collection by considering the periodic vehicle routing problem with intermediate facilities (PVRP-IF). An exact dynamic programming formulation and an efficient hybrid solution based on varied neighborhoods were proposed. A set of benchmark examples were developed and searched. Cantu-Funes et al. [
38] considered the periodic vehicle routing problem with additional factors, such as multiple models, multiple stations, and lead times. A stochastic adaptive greedy algorithm was then proposed for solving this problem. Alinaghian et al. [
39] presented a new variant of the periodic vehicle routing problem in which reaching the customers affects the market share and where the objective function is to minimize the total transit time and maximize the market share. In order to solve this model, multi-objective particle swarm (MOPSO) and local MOPSO algorithms are applied, and the results of the algorithms are compared based on some comparison metrics. Racha et al. [
40] proposed a meta-heuristic based on the particle swarm optimization (PSO) algorithm for the multi-period vehicle routing problem with profit (mVRPP) to maximize the total profit collected, where the planning horizon of each vehicle was divided into several cycles. Dong et al. [
41] introduced a new model of PVRP, the periodic vehicle routing problem with flexible delivery dates, which covers a wider range of applications and is able to answer most diverse customer requirements. Additionally, they proposed an algorithm based on iterated local search (ILS). This metaheuristic approach involves an iterative application of a local search algorithm and the use of perturbation as a diversification mechanism. Chen et al. [
42] studied a real-life container transportation problem with a wide planning horizon divided into multiple shifts; a variable neighborhood search algorithm with reinforcement learning (VNS-RLS) was thus developed. The study shows that algorithms can greatly reduce the rate of infeasible solutions explored during the search. Despite the achievements of meta-heuristics to obtain optimal solutions even for large-scale problems in a short period of time, novel and attractive improvements are emerging, improving the adaptability to the solution and stagnation prevention techniques [
43]. The traditional algorithms, such as genetic algorithm, particle swarm optimization algorithm, variable neighborhood search algorithm, etc., have problems of slow solution speed and falling into a local optimum easily. Thus, this is another starting point of this research.
To answer these research questions, this study first explains the approaches to model and solve the problem we are concerned with. A mixed-integer linear programming model is designed for the multi-cycle medical waste recycling vehicle routing problem with time windows to reduce the number of vehicles dispatched and the transportation cost. Next, we propose an improved variable neighborhood search (IVNS) algorithm, which addresses the drawbacks of the conventional variable neighborhood search algorithm. The case study section presents the detailed results of the proposed decision optimization framework. We then examine the validity and superiority of the proposed metaheuristic-based approach for the multi-cycle medical waste recycling vehicle routing problem with time windows. The last section contains the conclusions and comments on limitations. To sum up, this study develops a decision-making framework to economically and efficiently determine the optimal routing of the medical waste recycling vehicle.
The contributions of this study are as follows:
- (1)
This is a pioneering study to establish a multi-cycle medical waste recycling vehicle routing decision-making framework with time windows.
- (2)
The decision-making framework developed takes into account the periodic strategy that can meet the demands for multi-frequency recycling services from medical institutions and improve the recycling efficiency of medical waste.
- (3)
An effective metaheuristic-based IVNS algorithm is proposed to solve the multi-cycle medical waste recycling vehicle routing optimization problem with time windows. A variety of retention strategies and improved perturbation mechanisms are devised to conquer the convergence rate and premature problem.
3. Improved Variable Neighborhood Search Algorithm (IVNS)
A two-stage approach is designed to solve the multi-cycle medical waste recycling vehicle routing problem with time windows in this section. In the first stage, the initial solution is constructed by using the Clarke–Wright algorithm (C–W), while, in the second stage, the problem is solved by an improved variable neighborhood search algorithm combined with the idea of a simulated annealing algorithm. First proposed by Clarke and Wright [
44] in 1964, the C–W algorithm is a greedy algorithm, the basic idea of which is to merge two loops of the transportation problem into one loop in turn so as to maximize the reduction in the total transportation distance at each time until the load limit of one vehicle is reached and then optimize the next vehicle. The variable neighborhood search algorithm is an improved local search algorithm that Mladenović first put forward in 1997 [
45]. This algorithm can perform an alternative search through the neighborhood structures composed of different operations and achieve a good balance between concentration and sparsity. Meanwhile, the simulated annealing algorithm was proposed by N. Metropolis et al. [
46] in 1953, and then S. Kirkpatrick et al. [
47] successfully introduced the idea of annealing into the field of combinatorial optimization in 1983 and developed a stochastic method for solving a large-scale combinatorial optimization problem. The proposed stochastic method is based on the similarity between the solution procedure of the optimization problem and the annealing process of the physical system and appropriately controls the temperature drop process to achieve simulated annealing by using the Metropolis algorithm so as to achieve the goal of solving the global optimization problem.
Consequently, the fundamental principles and benefits of the aforementioned algorithms are combined with this paper. The natural number coding method is transformed into the route taken by the medical waste recycling vehicle, the C–W algorithm rules construct the initial solution, two distinct fitness functions are set for iterative search, and multiple retention strategies are defined by combining the simulated annealing algorithm, further widening the search space. In addition, the disturbance mechanism is improved to guarantee that the algorithm can jump out of the optimal local solution and enhance the search capability of the solution space to obtain the final optimal route.
3.1. Solution Representation
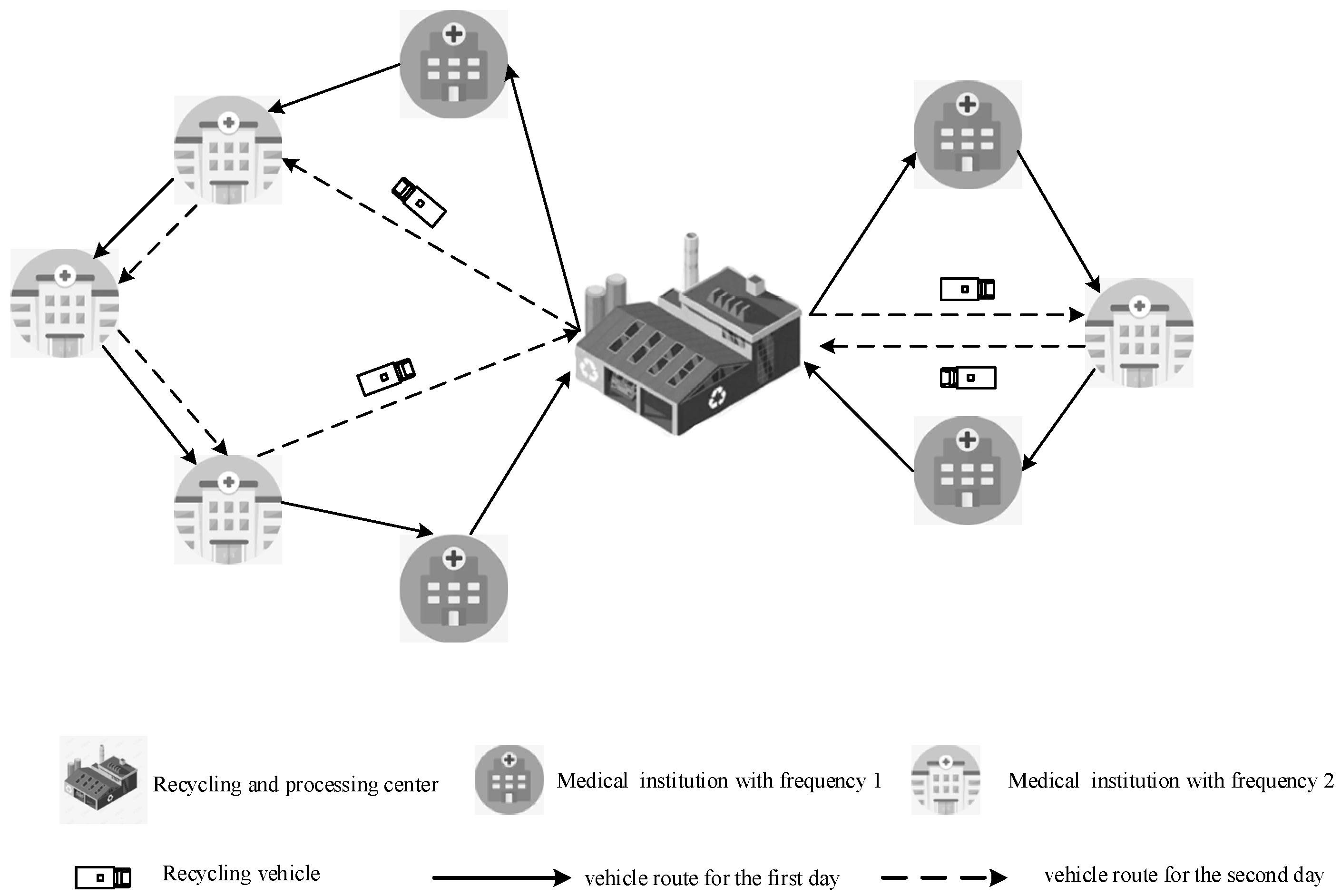
The natural number coding method is introduced: ‘0’ represents the warehouse, and ‘1, 2, 3, …, i, … n ’ indicate the different medical institutions. Meanwhile, to facilitate the design of the neighborhood search operator, the neighborhood solution consists of the execution sequence of each medical waste recycling vehicle. For example, 9 points requiring three medical waste recycling vehicles to provide the service are coded as 03720, 045190, 0680, which means the first medical waste recycling vehicle departs the recycling and processing center and returns to the center after points 3, 7, 2, called sub-route 1; the second vehicle also departs the recycling and processing center and returns to the center after points 4, 5, 1, 9, called sub-route 2; the third vehicle departs the recycling and processing center and returns to the center after points 6, 8, called sub-route 3. The corresponding recycling routing is shown below.
Sub-route 1: 0-3-7-2-0
Sub-route 2: 0-4-5-1-9-0
Sub-route 3: 0-6-8-0
3.2. Initial Solution Construction
The initial solution is constructed through the C–W algorithm, and a hard time window constraint is added to the traditional C–W algorithm, i.e., as many points as possible are inserted into a vehicle under the condition that all the constraints are satisfied. Although the solution accuracy is not as good as the ant colony algorithm or the genetic algorithm, a near-optimal satisfactory solution can be obtained quickly. The specific steps are as follows:
Step 1: Estimate the frequency of points and construct the odograph. The vehicle route needs to be arranged for a day if the cycle is A. Construct some empty sets of cycles, and then all nodes are classified according to service frequency and randomly added to different sets. The shortest distance from the depot to the customer node and between nodes is listed.
Step 2: Generate feasible solutions. According to the shortest route calculated from step 1, the medical waste recycling vehicle departs the vehicle parking point to each point one by one, and only one medical waste recycling vehicle is assigned to a point of service under the constraints, such as the rated load capacity of the medical waste recycling vehicle and the time window. Eventually, it sums up the total number of vehicles used to complete this recycling and the total mileage traveled for the recycling.
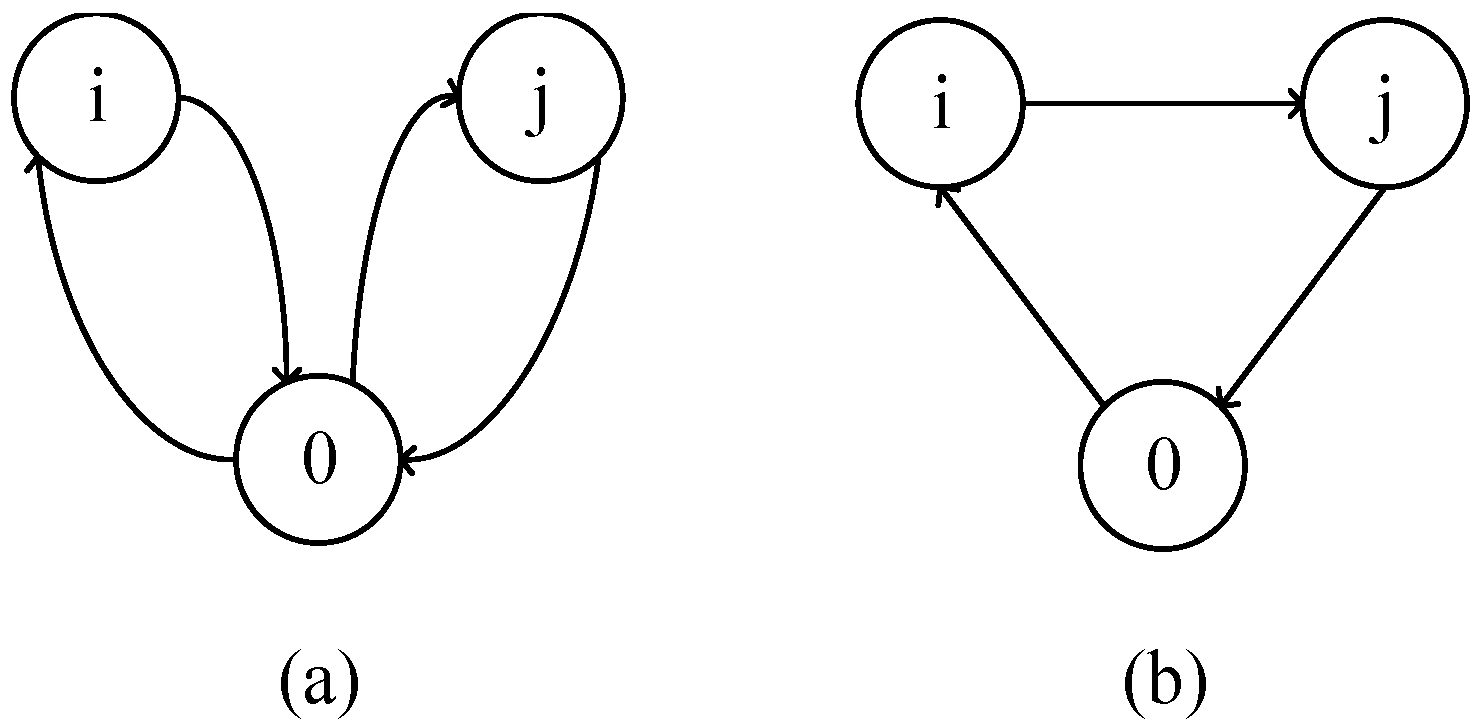
Step 3: Calculate the mileage savings between each point. According to the fundamental principle of the C–W algorithm:
; that is, to calculate the distance required for a vehicle to start from 0 point, visit node
i and
j separately, and then return to 0 point; besides the mileage required for the vehicle to start from 0 point, visit node
i and
j in turn, and then return to 0 point. The mileage saved is expressed as the mileage between any two nodes
i and
j completed by the same delivery vehicle during the visit process minus the shortest distance between any two nodes
i and
j. The aforementioned logic is shown in
Figure 2.
Step 4: Rank the mileage savings. The number of miles that can be saved from every point is obtained according to the mileage savings calculated in step 3. Arrange the value of the saved mileage corresponding to the route connected between each two nodes in descending order considering nodes i and j corresponding to the element max S(i,j) with the largest value in the mileage saving table.
Step 5: Merge the recycling routing loops. Rank the mileage saving values according to the mileage saving ranking table; the point with the largest mileage saving is connected in priority, and the loop is merged if two points can use the same medical waste recycling vehicle under the constraints of load capacity and time window. That is, disconnect the arcs between points i, j, and the vehicle parking point and link the arcs between i and j to obtain a new loop (o, …, i, j, …, o). Repeat this process until there is no more loop that can be merged.
Step 6: Determine the optimal solution. Keep repeating step 5 and comparing each solution until no better solution emerges.
3.3. Neighborhood Search Operators
Eight novel operation operators are designed to extend the diversity of neighborhood solutions: the shift operator, the cross operator, the relocate operator, the inter-exchange operator, the intra-exchange operator, the λ-inter-exchange operator, the λ-intra- exchange operator, and the k-opt operator. Besides, the combination of insertion and exchange is utilized to enlarge the solution space. The specific meanings and operation processes of these operators are as follows:
- -
Shift operator: removes a point from its current position and inserts another position in the same route.
- -
Cross operator: given to points on the different routes, exchange the position of the first point and its successor in the same route with the second point and its successor in a different route.
- -
Relocate operator: removes a point from its current position and inserts it into another position with a different route.
- -
Inter-exchange operator: takes two points on different routes and swaps them.
- -
Intra-exchange operator: takes two points from the same route and swaps them.
- -
The λ-inter-exchange operator: select a sub-chain with arbitrary length λ1 from one route and select another sub-chain with random length λ2 from a different route, and then swap the two selected sub-chains.
- -
The λ-intro-exchange operator: is similar to the previous operator, and the only difference is the operation carries out on the same route.
- -
The k-opt operator: generate a neighboring solution by using 2-opt at first. If no better solution can be found by 2-opt, a new neighbor solution will be generated by 3-opt. When 3-opt can produce a better solution, the operator returns to 2-opt. Otherwise, the operator will seek 4-opt. Repeat the above process until achieving k-opt.
The operation processes of the above operators are shown in
Figure 3.
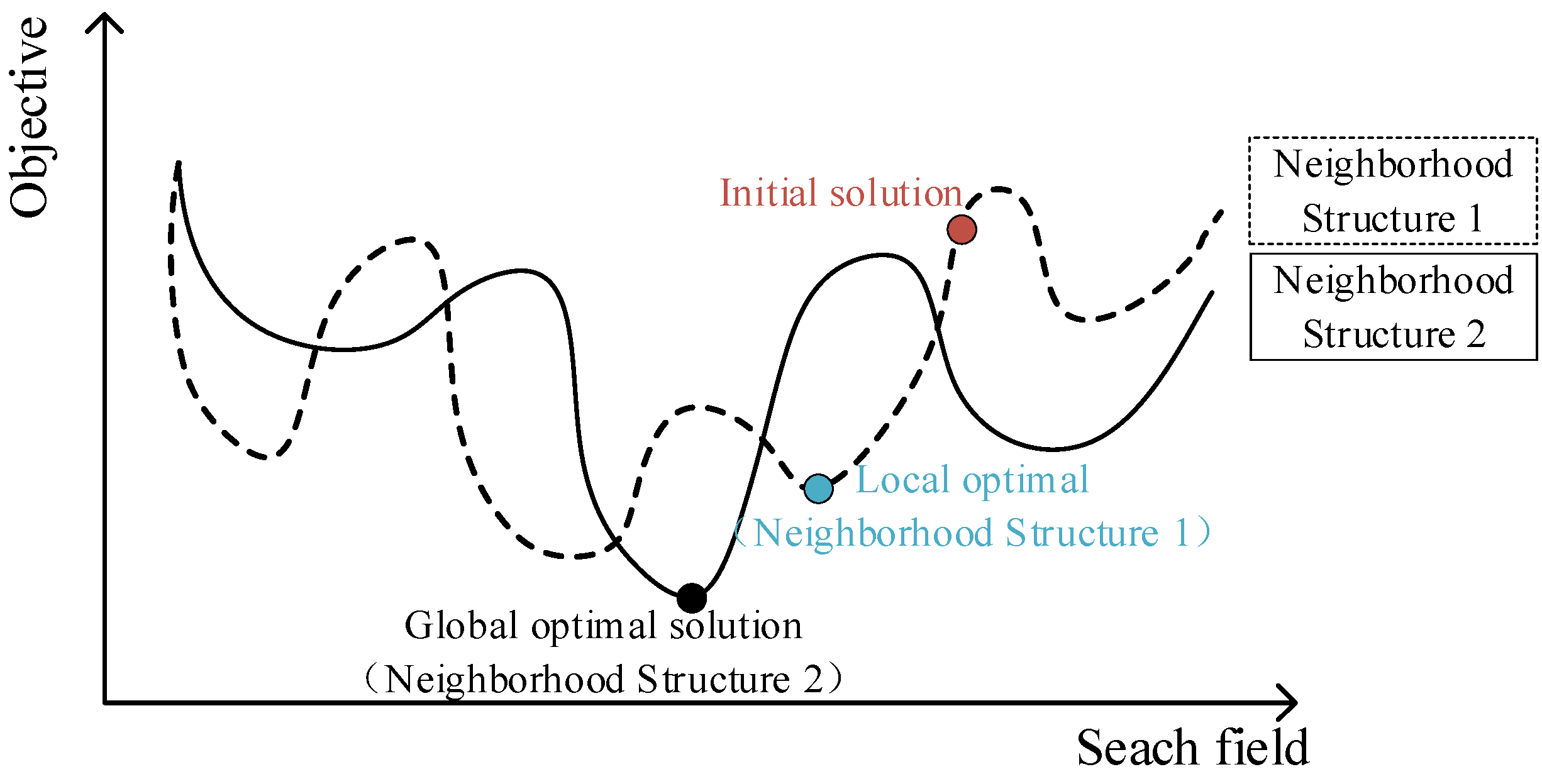
3.4. Structural Rules of the Solution
The traditional variable neighborhood search algorithm has the following characteristics when solving combinatorial optimization problems, as shown in
Figure 4: (1) the local optimal solutions may be different when the alternate search is carried out by using the neighborhood structures composed of different actions in the same search area. (2) The optimal local solution obtained for one neighborhood structure is not necessarily the optimal local solution for another neighborhood structure, and the algorithm is easy to fall into the local optimum and stop. (3) The final global optimal solution must be an optimal local solution of a neighborhood structure. Therefore, the basic idea of the simulated annealing algorithm is further integrated into the improved variable neighborhood search algorithm so as to increase the diversity of solutions and jump out of the local optimum. When the fitness value of the left or right neighborhood is smaller than its own fitness, an attempt is made to accept it for the initial value of the next iteration with a certain probability; i.e., the existence of infeasible solutions is temporarily allowed. There are two types of infeasible solutions in the neighborhood search: (1) the actual load of the medical waste recycling vehicle in the solution sequence exceeds the maximum load capacity; (2) the arrival time of a point in the solution sequence violates its time window range. In addition, we list the case where the number of vehicles in the feasible solution is reduced as the first-level indicator, and the case where the number of vehicles is not reduced but the total distance is shortened is listed as the second-level indicator. Similarly, the reduction in the number of vehicles in the infeasible solution is listed as the first-level index, and the situation where the number of vehicles is not reduced but the total distance is shortened is listed as the second-level index [
48]. Consequently, the corresponding penalty function is added to the objective function during the search process to deal with the infeasible solution, and then a new fitness function
f is formed as the following equation:
The right-hand side of the above equation is the transportation cost of the route, the penalty function for violating the time window, and the penalty function for violating the load capacity, where λ1 and λ2 are the penalty coefficients of the time window constraint and the load capacity constraint, respectively, with an initial value of 0.5. When the constraint of time and cargo capacity constraint are satisfied, the penalty coefficient becomes smaller, which is λ1/(1 + λ1),λ2/(1 + λ2), respectively, and True is returned. When the constraint of the time window or the cargo capacity constraint is violated, the corresponding penalty coefficient becomes larger, which is λ1 × (1 + λ1), λ2 × (1 + λ2), respectively, and returns False.
Figure 4.
Illustration of the local search process.
Figure 4.
Illustration of the local search process.
3.5. Perturbation Mechanisms
The main purpose of the perturbation process is to obtain a large number of random solutions through some transformation. Each neighborhood structure needs to find a balance between sufficiently perturbing the current solution and retaining the better-quality part of the current solution, thus expanding the search space of the current solution and avoiding falling into a local optimum. As shown in
Figure 5, the perturbation frequency of the traditional variable neighborhood search algorithm is too high, so the algorithm cannot thoroughly search the current neighborhood solution and jump into another neighborhood structure, and the objective function changes accordingly. Because the randomly generated neighborhood solution deviates significantly from the original neighborhood solution after perturbation, the search for the current neighborhood solution is not comprehensive enough. Therefore, the target value of the currently generated neighborhood solution is set to infinity by the improved variable neighborhood search algorithm when no optimal solution is found after Y consecutive iterations of the current neighborhood structure, and the newly generated neighborhood solution will replace the neighborhood solution with the infinite target value and be passed down during the next traversal of the operation operator. Eventually, an optimal local solution with good quality will be obtained again while speeding up the algorithm by continuously seeking and replacing different neighborhood structures.
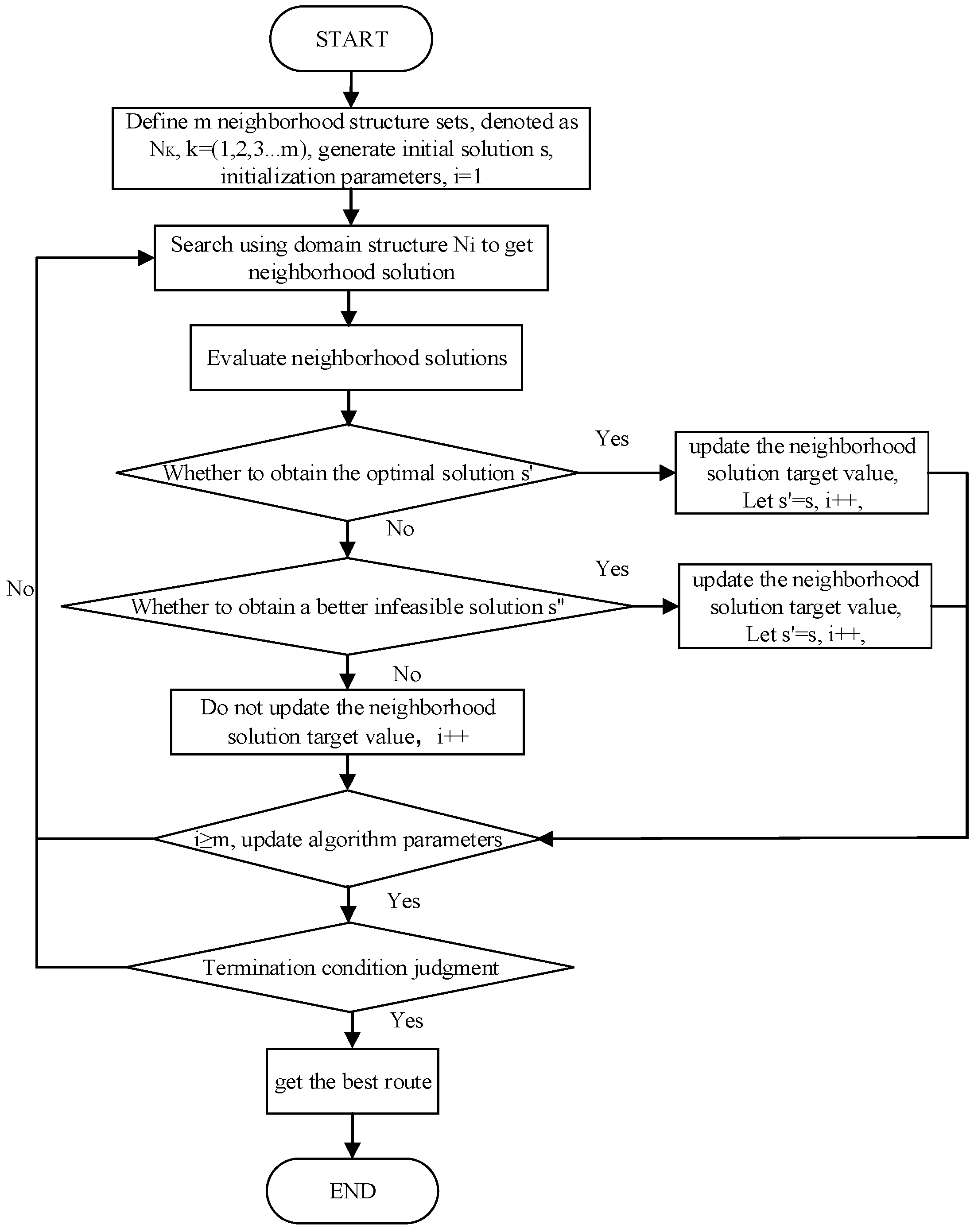
3.6. IVNS Procedure
The specific procedure of the proposed IVNS algorithm is shown in
Figure 6. First, a feasible initial solution is generated by the C–W algorithm, the set of neighborhood structures is defined, the parameters are initialized, and then the main algorithm is passed in. Second, each newly generated neighborhood solution is calculated and evaluated during the neighborhood search: the target value is updated and passed to the global optimum if the optimized solution is obtained; the target value is also updated if no optimized solution is obtained and a better infeasible solution is searched; if neither of the above occurs, there is no updated solution obtained in this iteration. Finally, the termination condition is determined, and the algorithm is terminated if the number of iterations reaches a given threshold.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}