In this paper, we introduce a multidimensional unified expression and geometric computation based on CGA. The unified expression of multidimensional geometric objects is realized based on the multivector. By using the geometric product, the similarity relationship of spatial objects, spatial topology, direction, and distance can be conveniently computed, which provides a new solution for the spatial geometric similarity retrieval.
3.2. Shape Similarity Computation
Falomir et al. [
50] conducted similarity measurements of spatial objects based on qualitative shape descriptions. The complete description of the shape of a 2D object is given from a set of qualitative features as follows:
where
n is the total number of relevant points of the object,
ECi describes the edge connection that occurs at the point
Pi,
Ai|
TCi describes the angle or the type of curvature at
Pi,
Li describes the compared length of the edges connected at
Pi, and finally,
Ci describes the convexity at
Pi.
In this study, the qualitative shape representation model (QSDM) of spatial objects is established on the basis of their research. The spatial objects are edge-connected, so we employ the other three features.
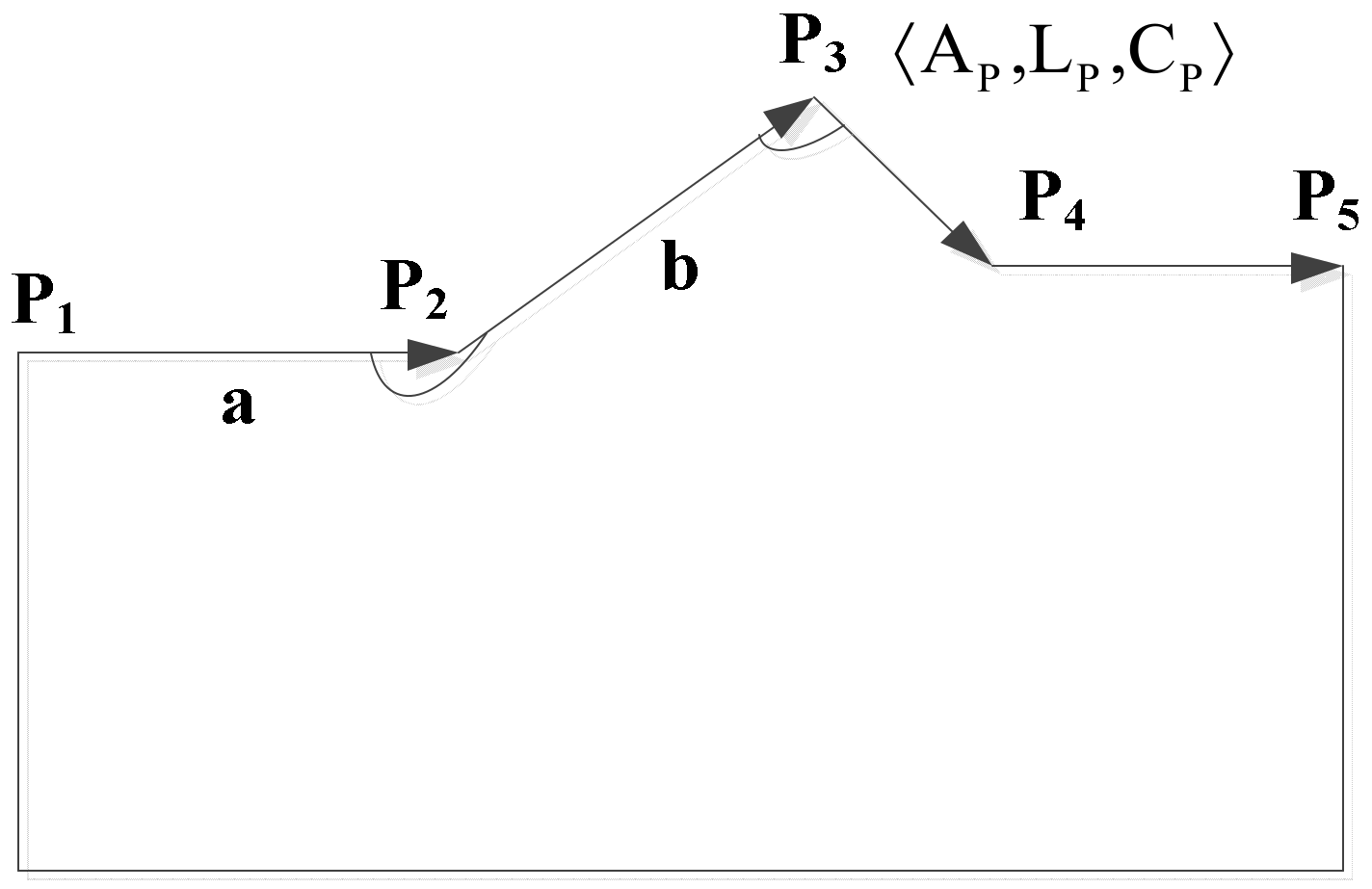
As shown in
Figure 2, it is assumed that
P2,
P3, and
P4 are three points of the spatial object
S, which are connected in turn. At point
P3, a three-tuple is defined to represent the relevant point,
where
AP denotes the angle between line segments
P2P3 and
P3P4,
LP denotes the ratio of the length of the line segments, and
CP denotes the concavity and convexity of point
P3.
3.2.1. Angle Computation
The angle between two adjacent line segments of the polygon is computed at relevant points by using the inner product. For one-dimensional vectors
a and
b, which are constructed by connecting a relevant point
P3 to its previous point
P2 and its next point
P4, respectively, the angle is computed by GA, which encodes the inner and the outer product; the inner product is proportional to the cosine, and the outer product is the sine. Thus, the value of the angle can be computed by the arctan2 function. At first, we partition the angle into five intervals, {[0, 40], (40, 85], (85, 95], (95, 140], (140, 180]}, and the corresponding semantic expressions of the five intervals are {very_acute, acute, right, obtuse, very_obtuse}. In this work, we use an open ball
Br(c) (Borelian notation) where
(center) and
(radius). Given two internals,
and
, a family of distances between intervals was defined [
51], which depends on three parameters as follows:
where
,
, and
A is a symmetrical 2
2 matrix of weights. Here, we use the most natural choice for the
A matrix, which is the identity matrix that provides the next distance:
Using Borelian notation and the interval distance, for example, for the two intervals [0, 40] and [40, 85],
and
,
= 42.6, which is the distance between the very acute and acute. Using the same process, we obtain all the angle relation distances, as shown in
Table 1.
3.2.2. Ratio of Length Computation
The lengths of two adjacent line segments of polygon feature points are computed using the inner product. The Euclidean distance between two points is directly embedded in the inner product computation with the expression , and the ratio of the lengths is the ratio of the lengths of two adjacent line segments.
We partition the ratio of the lengths into seven intervals, {(0, 0.4], (0.4, 0.6], (0.6, 0.9], (0.9, 1.1], (1.1, 1.9], (1.9, 2.1], (2.1, 10]}, and the corresponding semantic expressions of the seven intervals are {much_shorter (msh), half_length (hl), a_bit_shorter (absh), similar_length (sl), a_bit_longer (abl), double_length (dl), much_longer (ml)}. Using Borelian notation and the interval distance, the computing method is the same as Formula (3), and we obtain the angle relation distances, as shown in
Table 2.
3.2.3. Concavity and Convexity Judgment
The concavity and convexity of the angle between two adjacent line segments of the polygon are judged using the inner product. For example, for point P2, its concavity and convexity can be determined by the relation between a one-dimensional vector a = P1P2 and the point P3. If the point P3 is on the left of vector a, the point P2 is concave; otherwise, P2 is convex. The concrete computation can construct a one-dimensional vector c = P1P3 and a one-dimensional vector m that is perpendicular to P1P2 on the right, and then the sign of the inner product c·m is examined. If c·m > 0, point P3 is on the right of vector a. If c·m < 0, point P3 is on the left of vector a. For concavity relation distance, it equals 0 if they are the same; otherwise, it equals 1. For two concave or convex relations, the distance is 0, and for one concave and the other convex, the distance is 1.
The computations of the three parameters above are the components of the shape computation, which mainly rely on inner product computation. An inner product contains the information of the angle and distance, which can obtain the three-tuple quantitative values of the shape expression model concisely and intuitively and lay the foundation for the computation of the shape similarity.
For two objects, we adopt the following formula to compute the shape similarity between them:
where
RPA and
RPB denote the relevant points of objects
A and
B, respectively;
ds(
i) denotes the distance between two relations;
Ds(
i) denotes the maximum distance; and
wi denotes weights for each relation.
3.3. Topological Relations Similarity Computation
Zong [
47] performed research on spatial topological relations based on geometric algebra and discussed the topological relations between a point, line segment, and triangle. Chen [
48] sought the topological relations between two polygons by decomposing a polygon into triangles. In this article, we do not distinguish the topological relations as Chen did, but rather, we take the polygon as a whole.
The spatial topological relations are determined based on the research of Zong and Chen. We divide the object into the interior, boundary, and exterior (the point can be divided into the interior and the exterior, without the boundary), use the geometric product, and construct different discriminants. Thus, topological relations between objects of different types can be obtained.
3.3.1. Point and Other Objects
- (1)
Topological relations between two points
For two points
A and
B, the discriminant is constructed as follows:
If
t = 0,
A intersects
B, and the topological relation is pp-equal. If
t <> 0,
A does not intersect
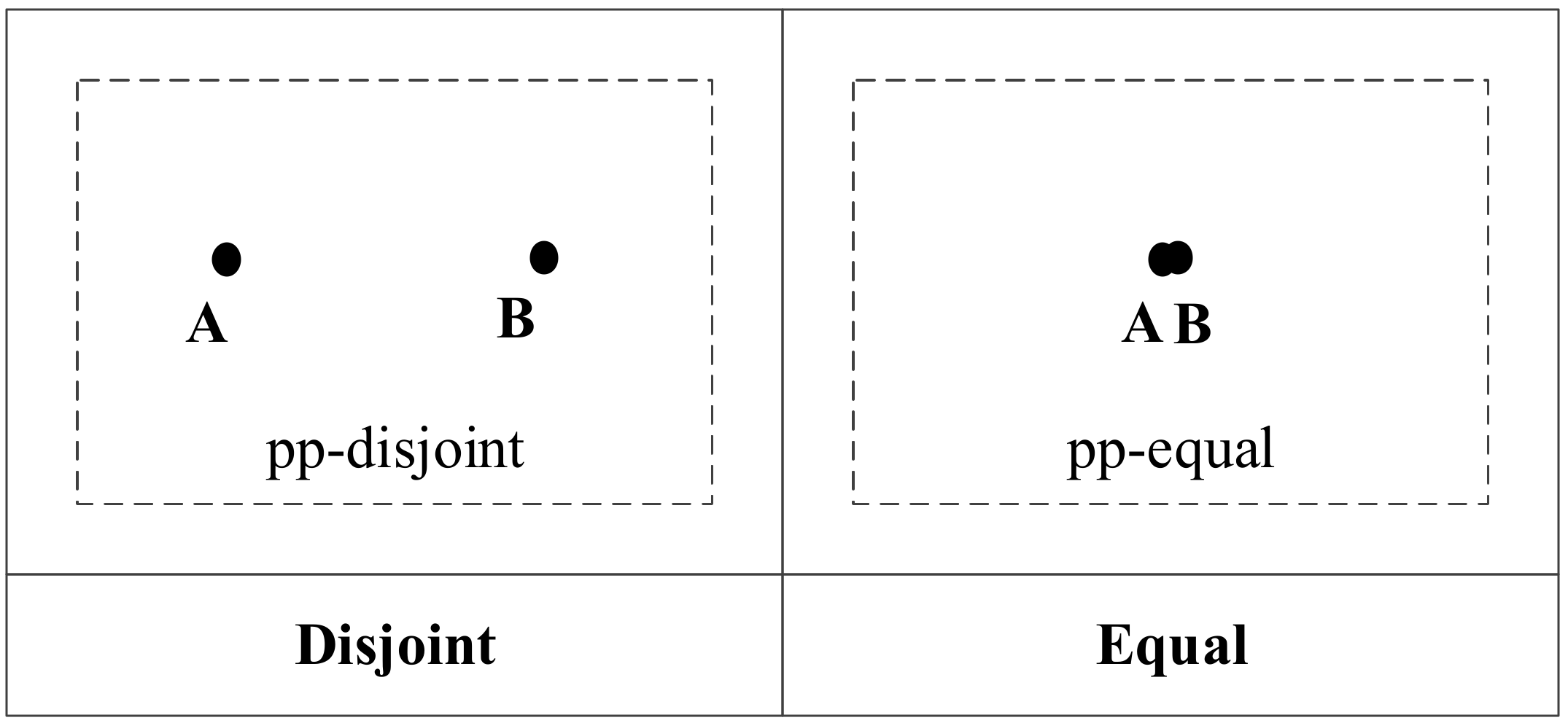
B, and the topological relation is pp-disjoint. The topological relations are shown in
Figure 3.
Using the topological relation operation between two points, we obtain two relations: pp-disjoint and pp-equal.
Figure 4 shows the corresponding conceptual neighborhood diagram. For two points, when the topological relation is the same as the other two, the relation distance is 0; otherwise, the relation distance is 1.
- (2)
Topological relations between point and line segment
A line segment is a straight line with a boundary constraint. For a straight line
L passing through points
A and
B, the judgment expression is
L =
A ^ B ^ ei. The topological relations between point
P and line segment
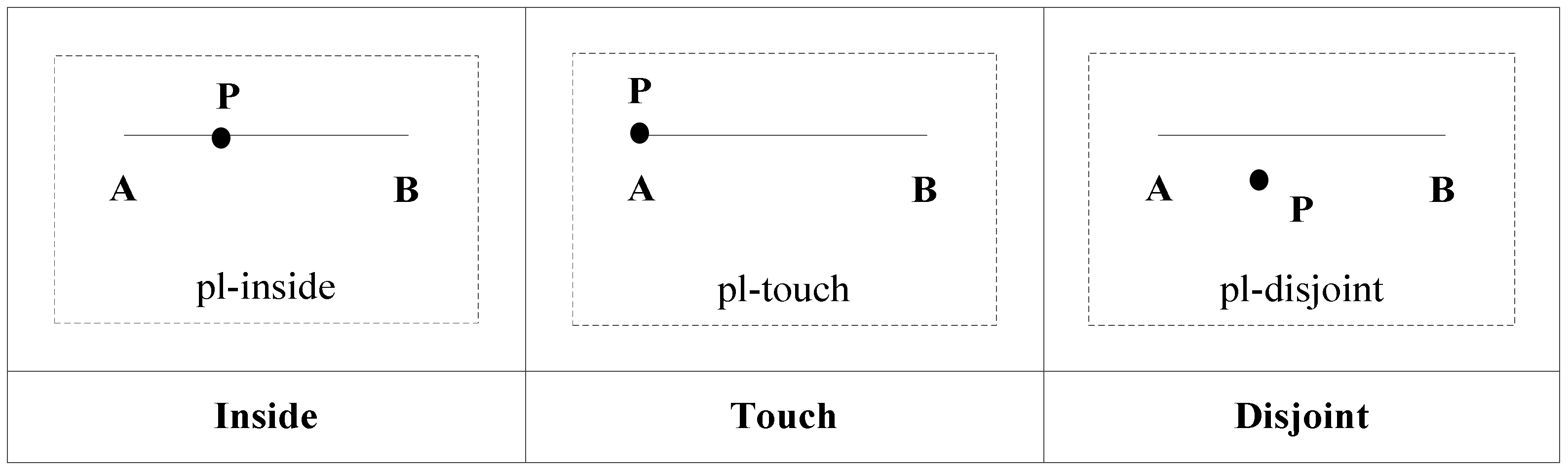
AB can be determined by the two following expressions:
If
t1 > 0 and
t2 > 0,
P is within
AB, and the topological relation between them is pl-inside. If
t1 = 0 or
t2 = 0,
P coincides with the edges of
AB, and the topological relation between them is pl-touch. If
t1 < 0 or
t2 < 0,
P does not intersect with
AB, and the topological relation between them is pl-disjoint. The topological relations are shown in
Figure 5.
Using the topological relation operation between a point and a line segment, we obtain three relations: pl-disjoint, pl-touch, and pl-inside.
Figure 6 shows the corresponding conceptual neighborhood diagram. The topological relation distances which are decided according to the conceptual neighborhood diagram are shown in
Table 3.
- (3)
Topological relations between point and polygon
The relations can be computed using the following judgment expression:
where
P is the point,
L is the boundary of the polygon, and
is the plane that contains the polygon
M.
,
C is the boundary circle,
ei denotes infinity, and
L denotes the straight line at which the boundary of the polygon
M is located.
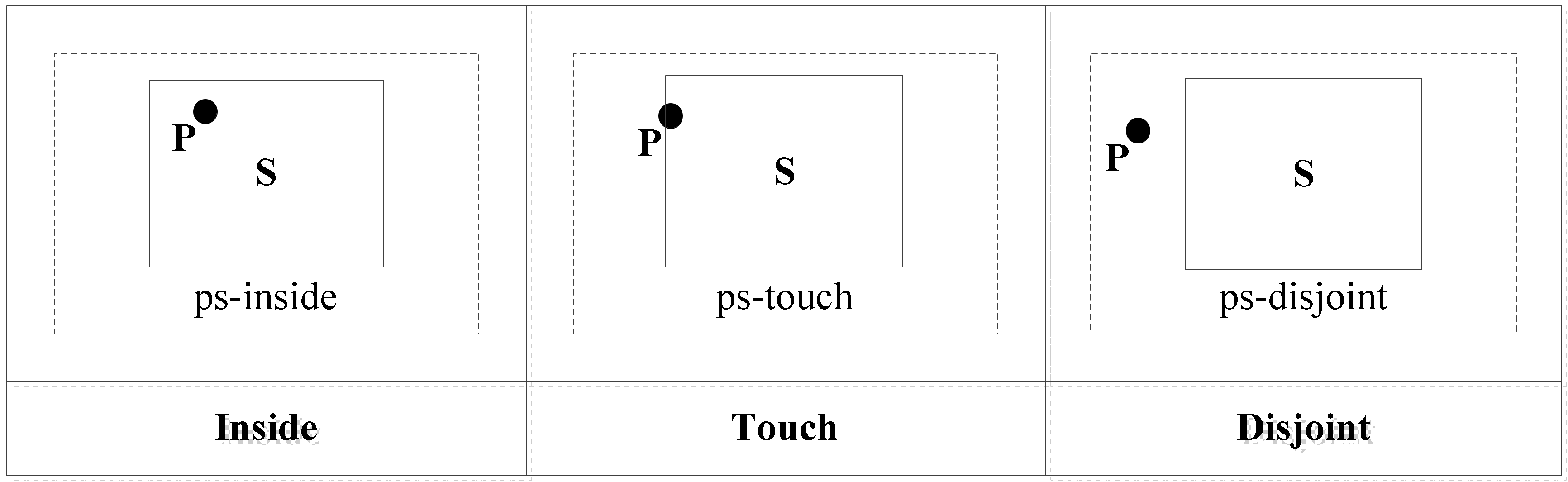
If
t < 0 for all judgment expressions,
P is inside
M. The topological relation between them is ps-inside. If
t = 0,
P is in the boundary of
M. The topological relation between them is ps-touch. In other situations,
P is outside
M. The topological relation between them is ps-disjoint. The topological relations are shown in
Figure 7.
Using the topological relation operation between a point and a polygon, we obtain three relations: ps-disjoint, ps-touch, and ps-inside.
Figure 8 shows the corresponding conceptual neighborhood diagram. The topological relation distances which are decided according to the conceptual neighborhood diagram are shown in
Table 4.
3.3.2. Two Line Segments
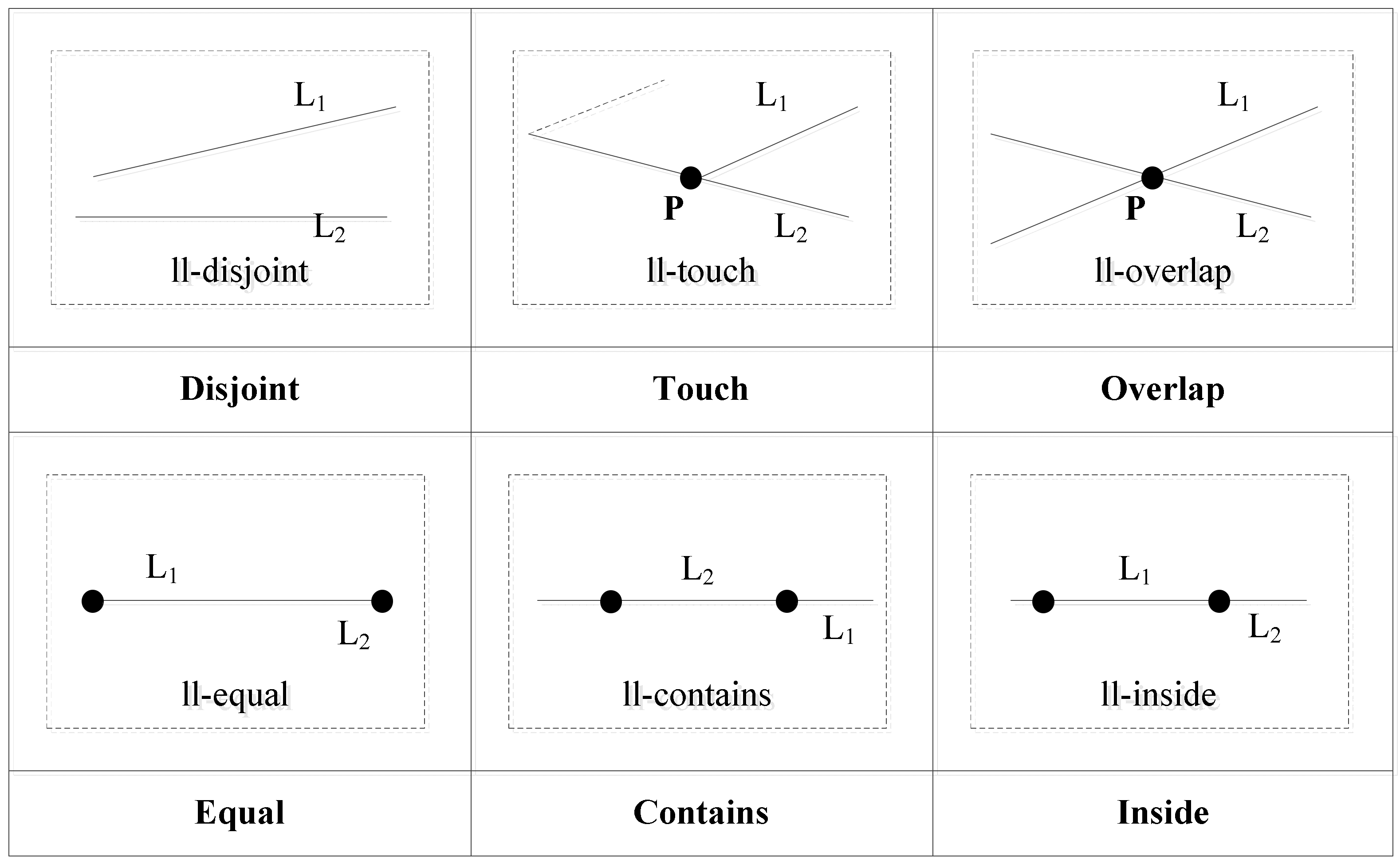
Using the operation between a point and a line segment, we can construct a computing strategy to determine the topological relations between two line segments. For two line segments
L1 and
L2, the relation between the two edge points of
L1 and the line segment
L2 is computed. When one of the edge points of
L1 is within
L2 or coincident with the edge points of
L2, the topological relation is ll-touch. When the two edges of
L1 coincide with two edges of
L2, the topological relation is ll-equal. When the two edge points of
L1 are inside
L2 and the two edge points of
L2 are outside
L1, the topological relation is ll-inside. When the two edge points of
L2 are inside
L1 and the two edge points of
L1 are outside
L2, the topological relation is ll-contains. When the interior of
L2 intersects with that of
L1, the topological relation is ll-overlap. When both the interior and the two edge points of
L2 do not intersect with the interior and the two edge points of
L1, the topological relation is ll-disjoint. The topological relations are shown in
Figure 9.
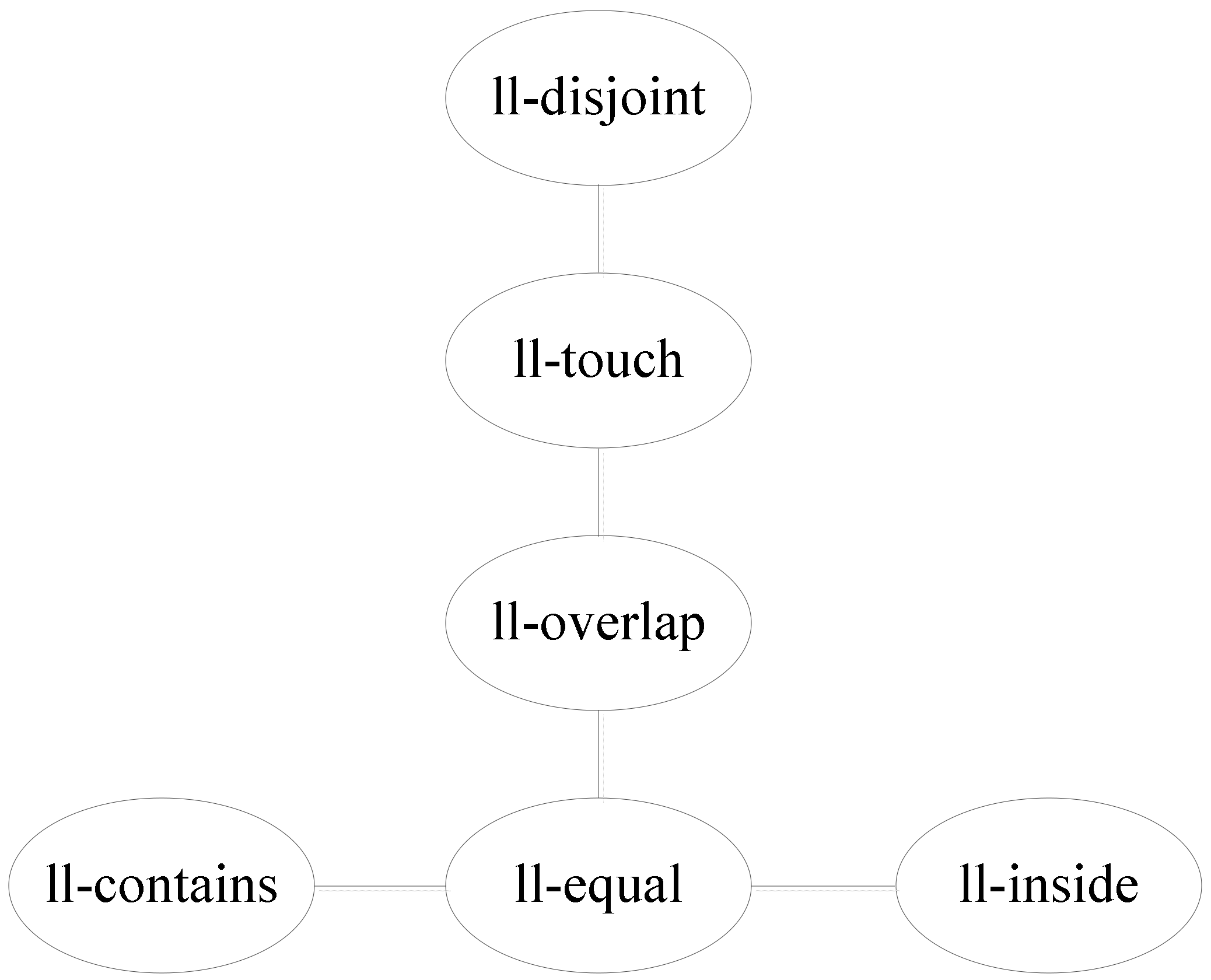
Using the topological relation operation between two line segments, we obtain six relations: ll-disjoint, ll-touch, ll-overlap, ll-equal, ll-contains, and ll-inside.
Figure 10 shows the corresponding conceptual neighborhood diagram. The topological relation distances which are decided according to the conceptual neighborhood diagram are shown in
Table 5.
3.3.3. Line Segment and Polygon
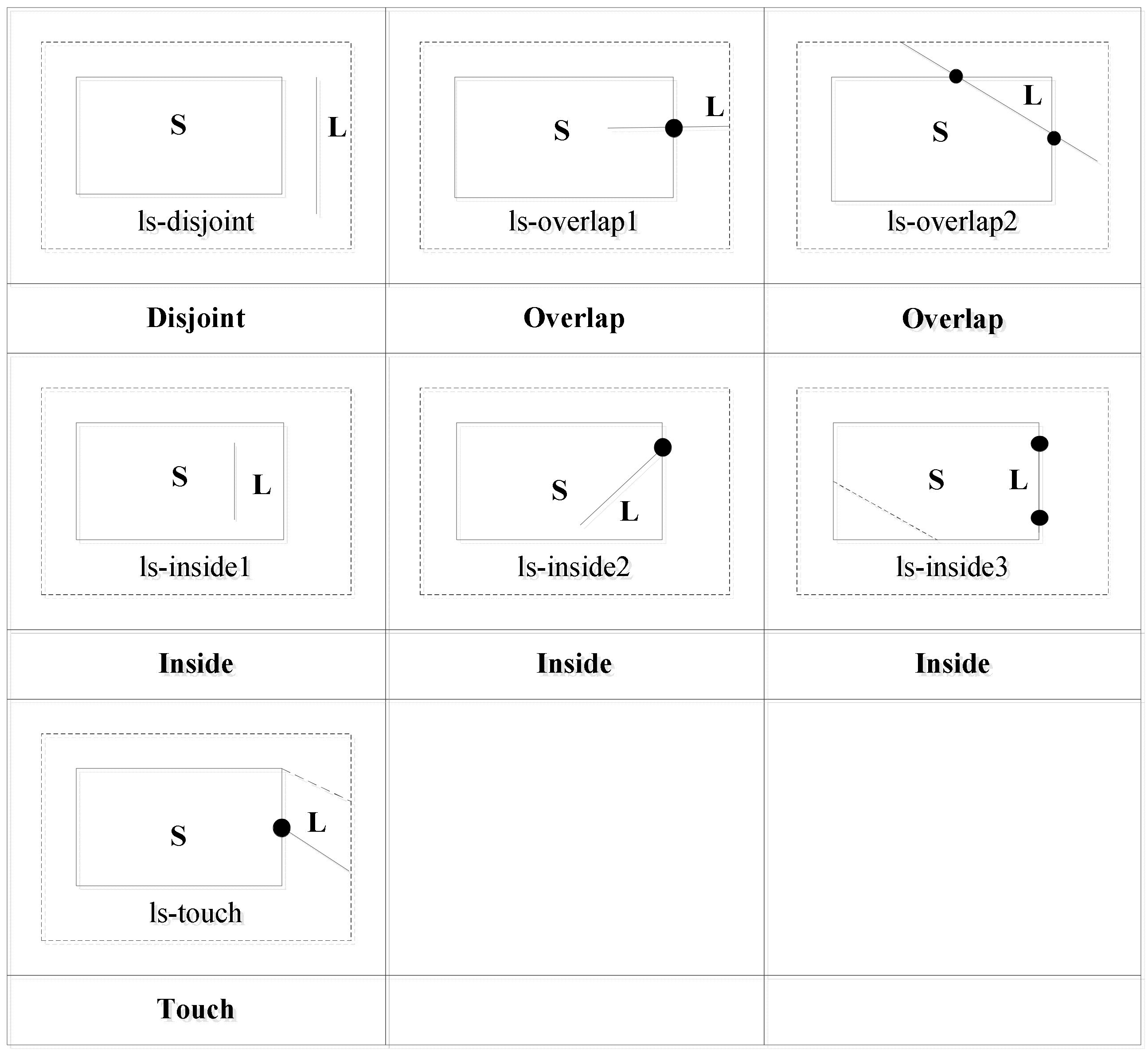
Using the operation between a point and a polygon and the operation between two line segments, we compute the topological relations as follows. For the two edge points of L, if both are inside polygon S, the topological relation between L and S is ls-inside1. If one edge point of L is inside polygon S and the other edge point is on the boundary of S, the topological relation between L and S is ls-inside2. If the two edge points of L are on the boundary of S, the topological relation between L and S is ls-inside3. If one edge point of L is on the boundary of S and the other is outside S, the topological relation between L and S is ls-touch. If one edge point of L is inside S and the other is outside S, the topological relation between L and S is ls-overlap1.
If the two edge points of L are outside S, the relation between the line segment L and the boundary of S is judged. If L does not intersect with the boundary of S, the topological relation between L and S is ls-disjoint. If L intersects with the boundary of S, the topological relation between L and S is ls-overlap2.
In summary, we can distinguish four topological relations: ls-disjoint, ls-overlap, ls-inside, and ls-touch. The relations ls-inside1, ls-inside2, and ls-inside3 can be recognized as ls-inside, and the relations ls-overlap1 and ls-overlap2 can be recognized as ls-overlap. The topological relations are shown in
Figure 11.
Using the topological relation operation between a line segment and a polygon, we obtain four relations: ls-disjoint, ls-touch, ls-overlap, and ls-inside.
Figure 12 shows the corresponding conceptual neighborhood diagram. The topological relation distances which are decided according to the conceptual neighborhood diagram are shown in
Table 6.
3.3.4. Two Polygons
Based on the operation between a point and a line segment, between a point and a polygon, and between two line segments, we compute the topological relations as follows.
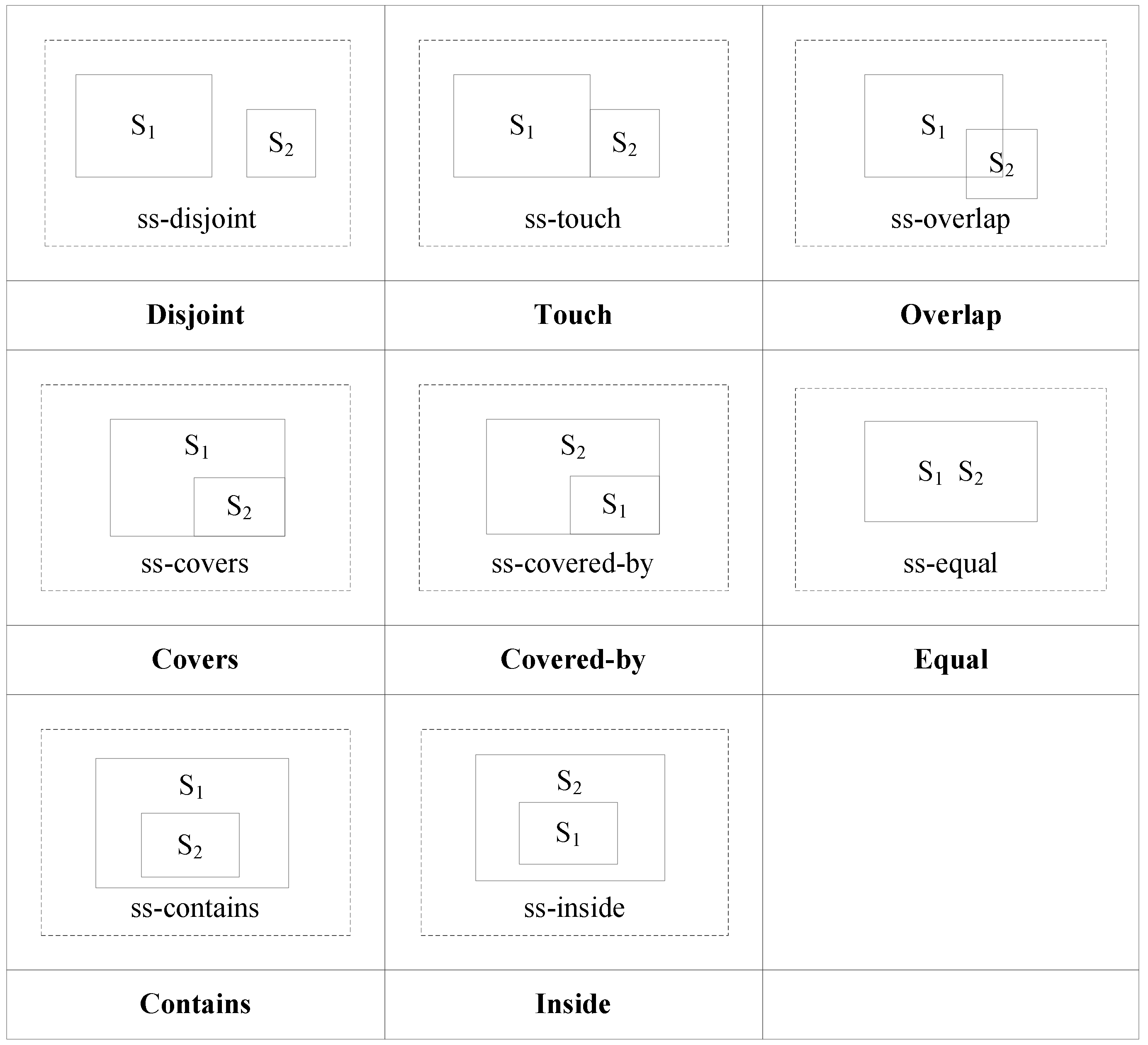
For all vertices {U1, U2, …, Um} of S1, if all are inside S2, the operation between a point and a polygon is used, and the condition is recorded as C1. If all the vertices are outside S2, the condition is recorded as C2. If they are all on the boundary of S2, the condition is recorded as C3. If some of the vertices are inside S2 and some are outside S2, the condition is recorded as C4. If some of the vertices are inside S2 and some are on the boundary of S2, the condition is recorded as C5. If some of the vertices are outside S2 and some are on the boundary of S2, the condition is recorded as C6. Likewise, we obtain the conditions D1, D2, D3, D4, D5, and D6.
If
C1 is satisfied but
D1 is not, the topological relation between
S1 and
S2 is ss-contains. If
D1 is satisfied but
C1 is not, the topological relation between
S1 and
S2 is ss-inside. If both
C2 and
D2 are satisfied, the topological relation between
S1 and
S2 is ss-disjoint. If both
C3 and
D3 are satisfied, the topological relation between
S1 and
S2 is ss-equal. If
C4 or
D4 is satisfied or both are, the topological relation between
S1 and
S2 is ss-overlap. If
D5 is satisfied, the topological relation between
S1 and
S2 is ss-covers. If
C5 is satisfied, the topological relation between
S1 and
S2 is ss-covered-by. If both
C6 and
D6 are satisfied, the topological relation between
S1 and
S2 is ss-touch. The topological relations are shown in
Figure 13.
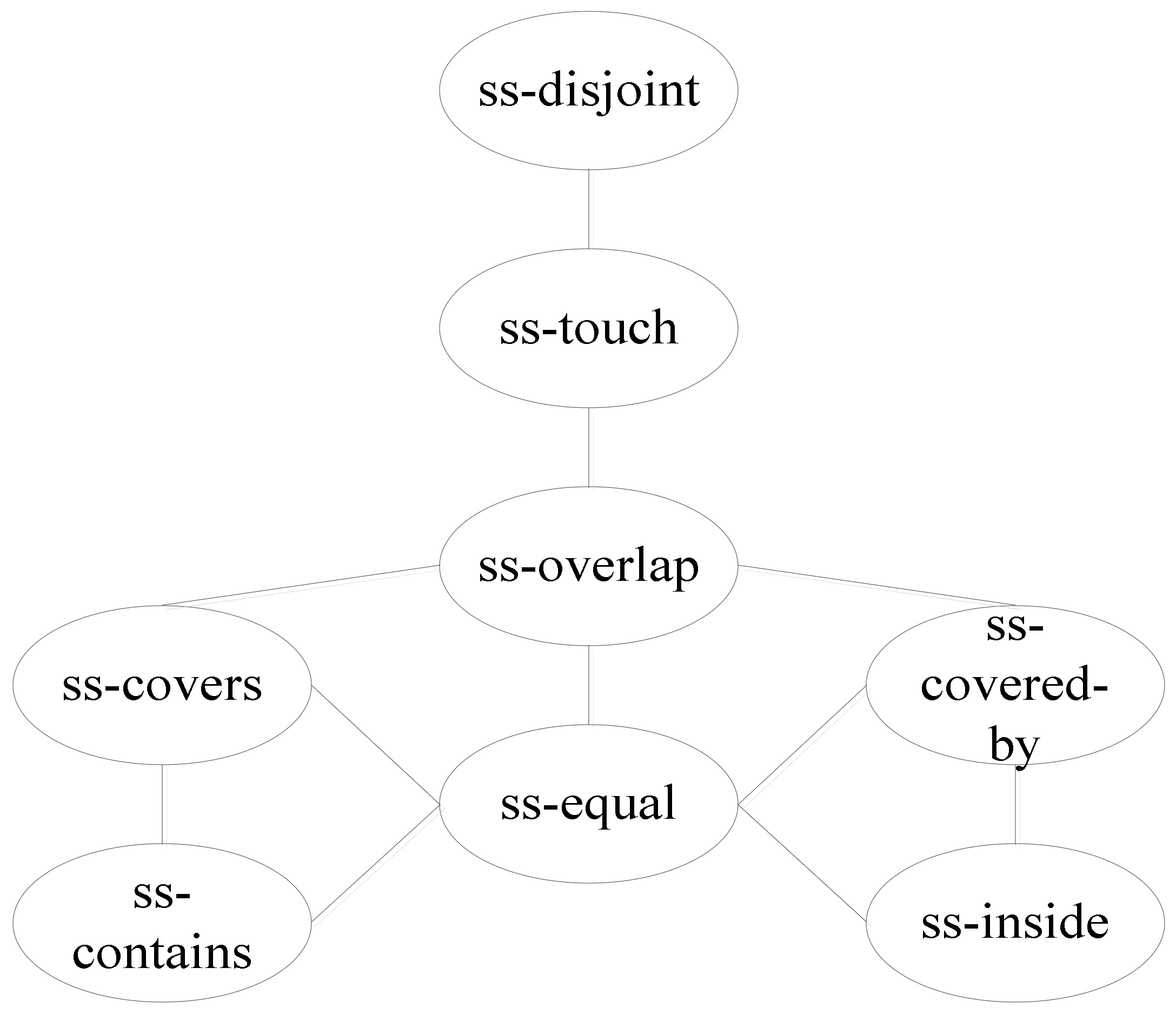
Using the topological relation operation between two polygons, we obtain eight relations: ss-disjoint, ss-touch, ss-overlap, ss-covers, ss-covered-by, ss-contains, ss-inside, and ss-equal.
Figure 14 shows the corresponding conceptual neighborhood diagram. The topological relation distances which are decided according to the conceptual neighborhood diagram are shown in
Table 7. The topological relations between two polygons can be distinguished using the same topological relations with the RCC8 model.
3.3.5. Topological Relation Similarity Computation Strategy
m spatial objects in query scene V are denoted as v1, v2, …, vm. n spatial objects in the query database U are denoted as u1, u2, …, un. We adopt the following strategy to compute the topological relations between two scenes. First, the topological relation operation is used to resolve the relation between two objects in the query scene, which is denoted as T1. Furthermore, we obtain the relation between two objects in the database scene, which is denoted as T2. By utilizing the corresponding conceptual neighborhood diagram, the relation distance is computed. Furthermore, the similarity SRi between T1 and T2 is computed.
We compute all topological relation similarities between objects in the query scene and corresponding objects in the database scene as follows:
where
WRi denotes the weight values of the topological relations. In this paper, the weight values are the same; however, for future work, the weight values can be different according to the actual scene. For example, the topological relation inside may be more important than disjoint.
SRi denotes the similarity between two relations, and
t denotes the number of matched objects.
3.4. Direction Relation Similarity Computation
The outer product realizes the dimensional and geometric operations, while the inner product provides the angle and distance information. For two geometric objects
O1 and
O2 of arbitrary dimensions, the metric information between two basic objects is as follows:
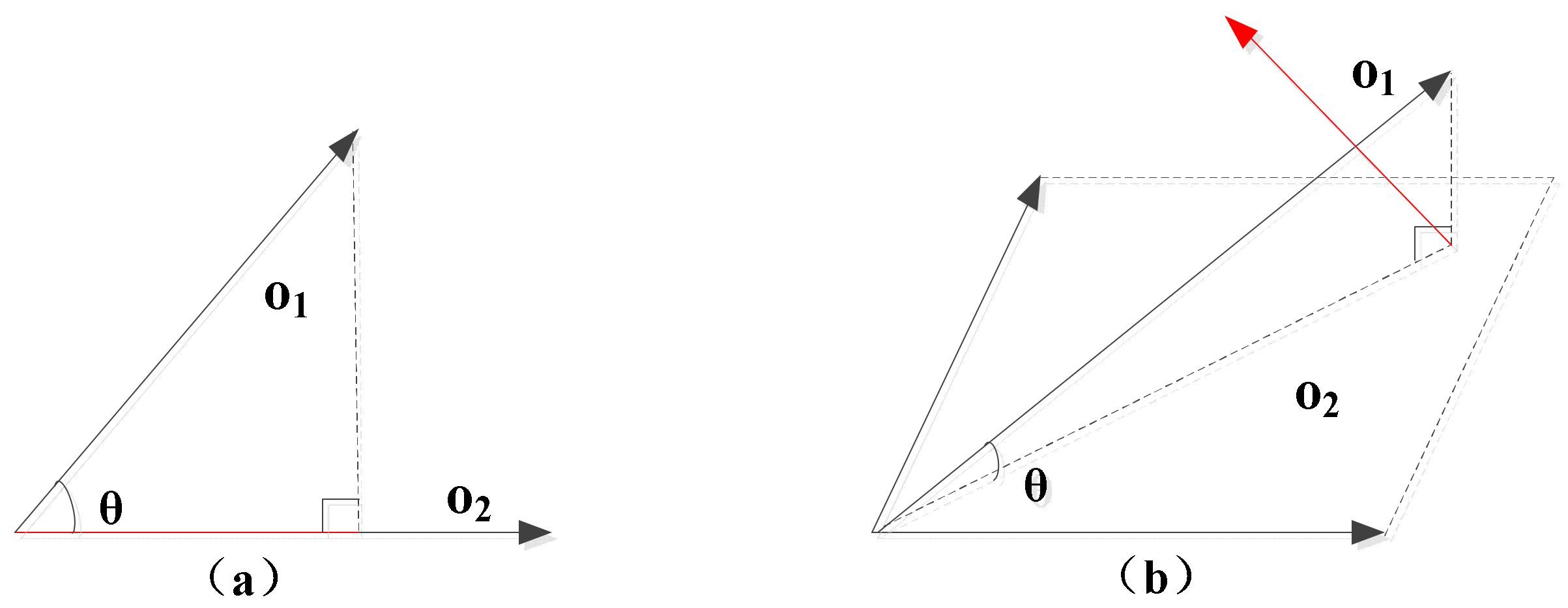
For example, as shown in
Figure 15a, for two vectors
O1 and
O2, the inner product is the distance that
O1 projects onto
O2. In
Figure 15b, for the vector
O1 and the plane
O2, the inner product is the vector that is in
O2 and perpendicular to
O1. Owing to high-dimensional scalability, the operation is conferrable to arbitrary dimensions, not limited to vectors [
52].
If P1(0,1) and P2(1,0) belong to a 2D Euclidean space, by converting them into the conformal space, we obtain C2ga_P1 = e2 + 0.5e∞ + e0 and C2ga_P2 = e1 + 0.5e∞ + e0. The origin point is C2ga_O = e0. The outer product between two points and infinity can be used to construct a line. Thus, the line P1P2 can be represented as C2ga_P1 ^ C2ga_P2 ^ e∞. The magnitude of P1P2 is |P1P2| =, and the magnitude of the unit base vector is |OE| = 1. Thus, the inner product P1P2·OE = |P1P2||OE|, and the computation result is , that is, .
The conformal space is angle-preserving. The angle computed by the inner product in conformal space reflects the angle in Euclidean space. The cosine function was symmetric within the scope of [0°, 360°]. If yOA − yOB < 0, then . If yOA − yOB > 0, then .
In CGA, according to the Grassmann hierarchical structure, the minimum bounding circle can be constructed by the vertices of the polygon. The radius of the circle is obtained by , and the center of the circle is computed by O = CeiC.
Thus, for two geometric objects A and B, the direction relation operation is implemented as follows. (1) The center points OA and OB of the minimum bounding circles are computed for A and B, respectively. (2) The inner product between OAOB and the unit base vector are computed, and then the angle value can be computed.
The angle value can be mapped to the corresponding angle interval, and the corresponding semantic expression can be acquired.
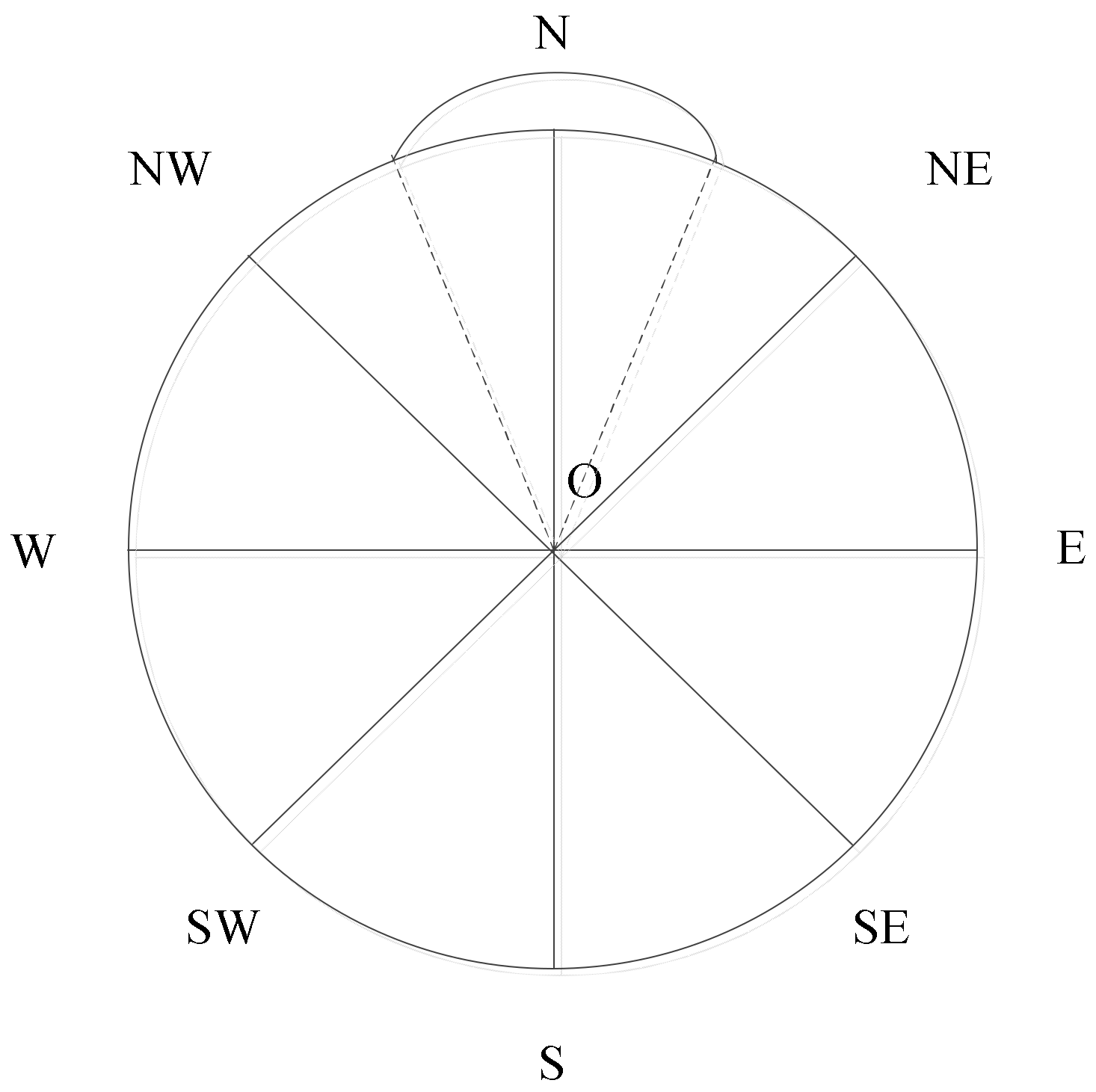
Figure 16 illustrates the relation between the direction relation semantic expression and the angle value.
The direction relation semantic expression is as follows: {N, NE, E, SE, S, SW, W, NW}, representing north, northeast, east, southeast, south, southwest, west, and northwest, respectively. The corresponding value intervals are {[67.5, 112.5), [22.5, 67.5), [337.5, 22.5), [292.5, 337.5), [247.5, 292.5), [202.5, 247.5), [157.5, 202.5), [112.5, 157.5)}. In Borelian notation, we obtain {B22.5(90), B22.5(45), B22.5(0), B22.5(315), B22.5(270), B22.5(225), B22.5(180), and B22.5(135)}. Using Formula (3), we find all r = 22.5, and the distance d = 45 between two adjacent directions. Hence, we simplify the distance, which is similar to the conceptual neighborhood diagram.
The direction relation is reflexive. When the direction relation distance surpasses 4, the format
DirMax −
DirCal is used to compute the relation distance. The final direction relation distances are shown in
Table 8.
We employ the direction relation operation to compute the angle value between two objects, map the angle value to an angle interval, obtain the semantic expression, and compute the distance and similarity of the direction relations. The similarity computation formula of the direction relation is as follows:
where
dr denotes the direction relation distance and
Dr denotes the maximal distance.
3.5. Distance Relation Similarity Computation
As discussed in
Section 3.4, the inner product contains the angle and distance information. In this section, we compute the distance information. The inner product is
C2ga_P1·C2ga_P2 = (
e2 + 0.5
e∞ +
e0)(
e1 + 0.5
e∞ +
e0). Based on the equations
and
, the value of the inner product is −1. The Euclidean distance is embedded in the inner product based on the expression
, and thus, the Euclidean distance is
=
.
For two geometric objects A and B, the distance relation operation is implemented as follows. (1) The center points OA and OB of the minimum bounding circles are computed for A and B, respectively. (2) The inner product between OA and OB is computed, and then the distance value can be computed.
In CGA, the distance relation operation is used to compute the distance between two objects. We determine the relation between the quantitative distance value and the distance interval and obtain the semantic distance expression. Using the distance relation table, we can compute the distance relation similarity.
In an actual scene, the distance value range is uncertain. We use the ratio of the specific value and maximal value to represent the distance relation. In this study, we define the distance relation semantics expression as {very close (vc), close (cl), a bit close (abc), commensurate (co), a bit far (abf), far (f), very far (vf)}. The corresponding distance intervals are {[0, 0.1), [0.1, 0.16), [0.16, 0.2), [0.2, 0.3), [0.3, 0.5), [0.5, 0.7), [0.7, ∞)}. In Borelian notation, we obtain {B
0.05(0.05), B
0.03(0.13), B
0.02(0.18), B
0.05(0.25), B
0.1(0.4), B
0.1(0.6), B
0.15(0.85)}. The distance relation distances computed by using Formula (3) are shown as
Table 9.
The similarity computation formula for the distance relation is as follows:
where
ds denotes the relation distance and
Ds denotes the maximal distance.
3.6. Spatial Geometric Similarity Computation
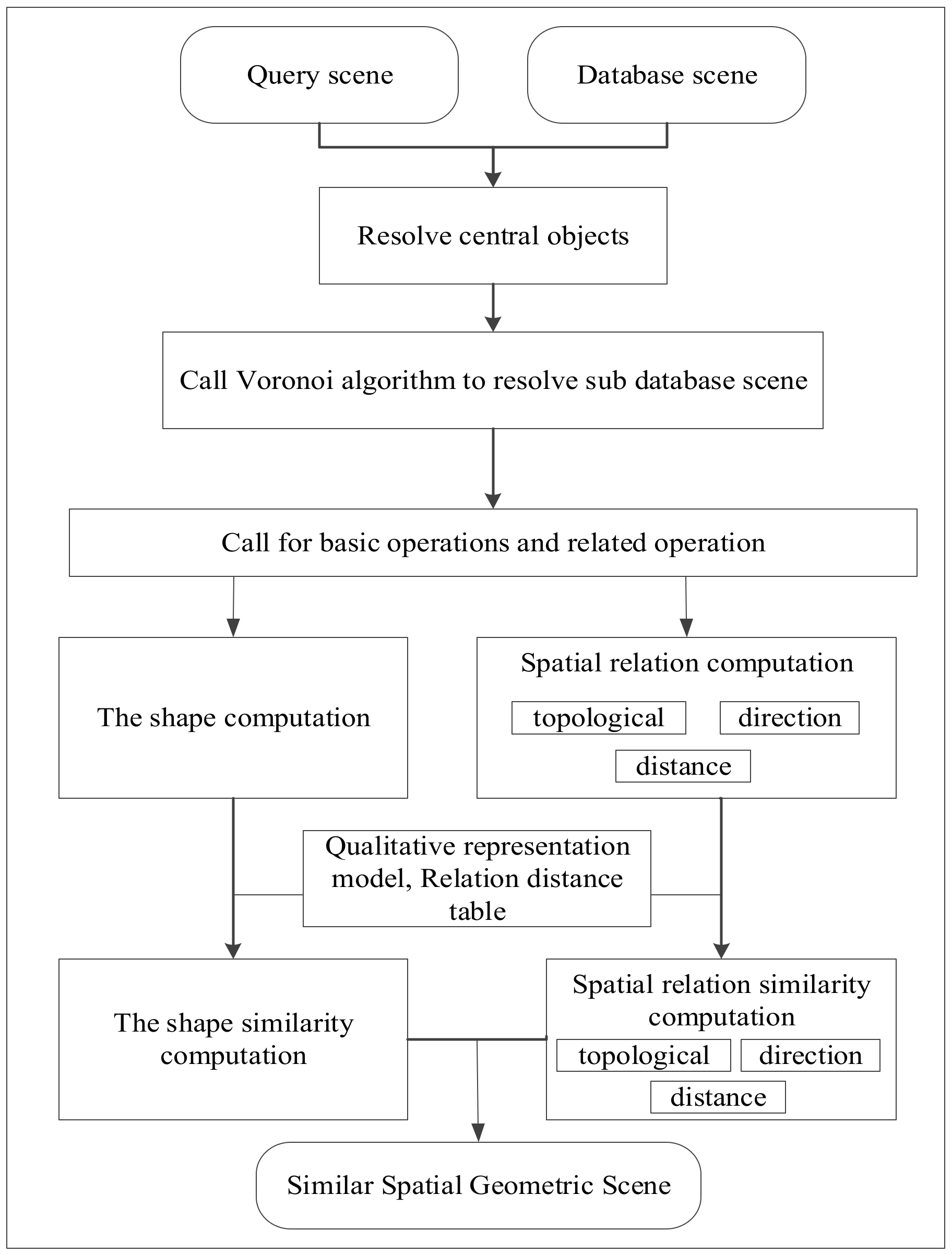
Based on the whole process shown in
Figure 1, we designed a retrieval method taking the shape and spatial relations (including topological, direction, and distance relation) into account. During the whole process, we assume that the weights are equivalent for the objects and the spatial relations between them. The topology, direction, and distance relations have the same effect on the spatial relation.
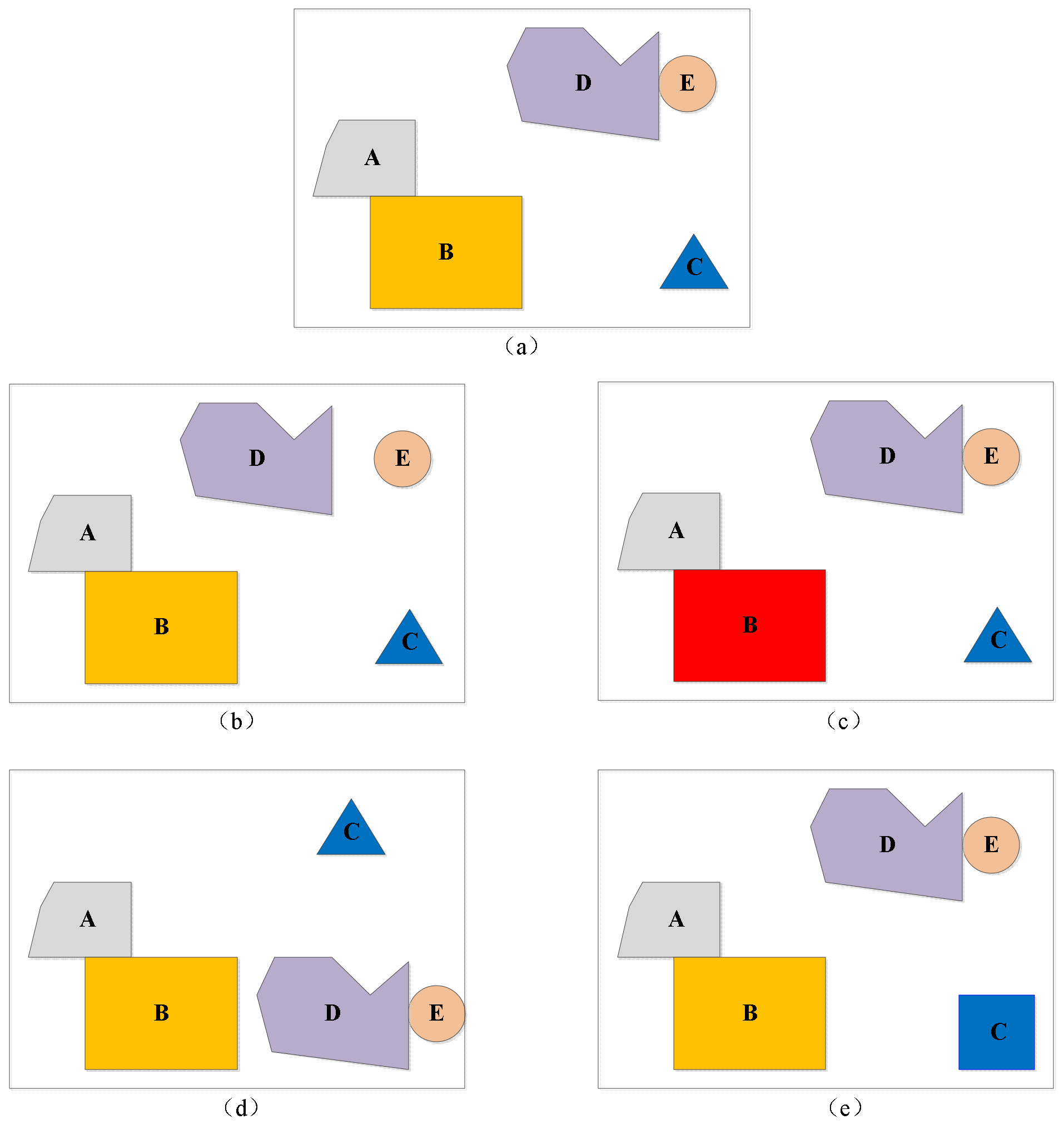
The scenes in
Figure 17 are considered as an example. We apply the object shape and spatial relation similarity computation model to analyze the example. For the query scene (a), using the multivector and corresponding relation operations, we obtain the following integrating representation [
46] form:
The shape and spatial relation information are implied in the representation. The related operations including topological relation, direction relation, and distance relation can be called to compute the corresponding relations directly. The topological, direction, and distance relations in the query scene are listed in
Table 10,
Table 11 and
Table 12, respectively.
For the database scene (b), following the same computation strategy, we obtain the topological, direction, and distance relations, as shown in
Table 13,
Table 14 and
Table 15, respectively.
Based on the spatial relations computed by the corresponding operations, the topological, direction, and distance relation similarities between (a) and (b) are STop = (0.75 × 1 + 1 × 9)/10 = 0.975, SDir = (1 × 10)/10 = 1.0, and SDis= ((1 − 0.255/0.806) × 2 + (1 − 0.158/0.806) + 7 × 1.0)/10 = 0.917, respectively. For (a) and (b), the attribute and shape are the same, so the spatial similarity is Sim (a, b) = 1/2 + (STop + SDir + SDis)/6 = 0.968.
In the database scene (c), the different colors represent different attributes, and only object B was different. When taking the shape and spatial relations into consideration, the similarities between (c) and (a) are equal, and both are 1. For the database scene (d), we obtain the spatial relation tables shown in
Table 16,
Table 17 and
Table 18.
Based on the spatial relations computed by corresponding operations, the topological, direction, and distance relation similarities between (a) and (d) are STop = (1 × 10)/10 = 1.0, SDir = ((1 − 0.25) × 3 + (1 − 0.75) × 3 + 1 × 4)/10 = 0.7, and SDis = ((1 − 0.2/0.806) × 2 + (1 − 0.255/0.806) × 1 + (1 − 0.158/0.806) × 1 + 1.0 × 6)/10 = 0.899, respectively. The attributes and shapes of the two scenes are the same, so the shape similarity is 1. Hence, the spatial similarity is Sim (a, d) = 1/2 + (STop + SDir + SDis)/6 = 0.933. According to the computation results, the spatial similarity between (b) and (a) is bigger than that between (d) and (a), so the scene (b) is more similar than (d) to (a).
For the database scene (e), the spatial relations are the same as in the query scene (a). The shape of the object
C is different: it is a triangle in (a) and a square in (e). The shape similarity operation is used first to construct a three-tuple representation for the relevant points. For scene (a), the relevant point representations of object
C1 are <acute, sl, convex>, <acute, sl, convex>, and <acute, sl, convex>. Similarly, the point representations of object
C5 are <right, sl, convex>, <right, sl, convex>, <right, sl, convex>, and <right, sl, convex>. Thus, the shape similarity between
C1 and
C5 is
Sim = ((1 − 32.6/(140.0 × 3)) × 3)/4 = 0.69. Thus, the spatial similarity between scenes (a) and (e) is
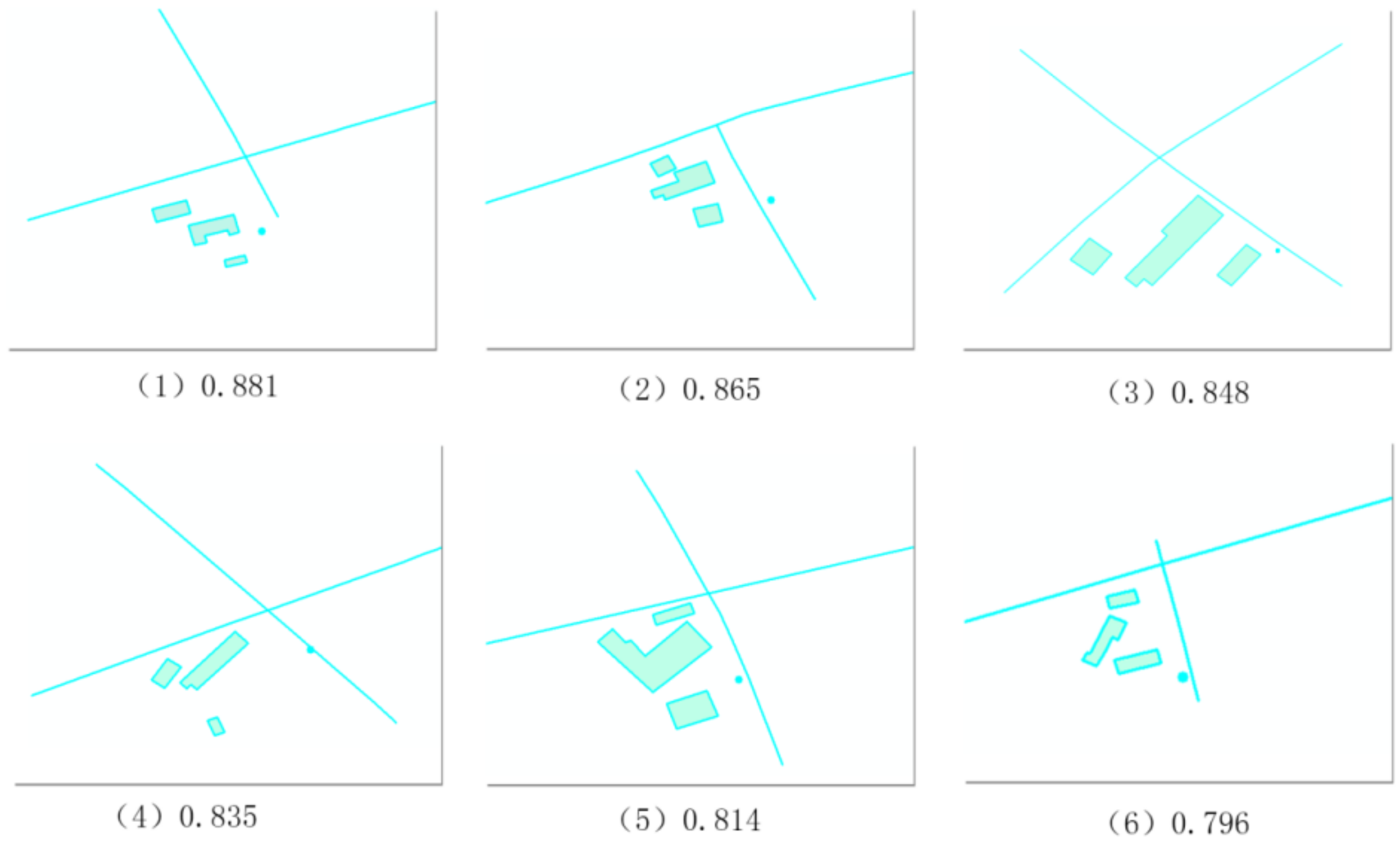
Sae = 0.5 + ((0.69 + 4)/5)/2 = 0.969. The similarity values between each scene and the query scene are shown in
Table 19.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}