
Influence of Varied Load Assistance with Exoskeleton-Type Robotic Device on Gait Rehabilitation in Healthy Adult Men



Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Device Used: A Robot-Assisted Gait Training Device
2.2.1. Key Principles
- ①
- Voluntary control mode: Myoelectric potentials (electromyography [EMG] activity) from the flexor and extensor muscles of the hip and knee joint are sensed by electrodes, and the center of pressure at the foot is sensed via specialized shoes. An assist level is then selected, and joint movement is controlled at the calculated “assist torque (Nm)”.
- ②
- Impedance control mode: Weight-bearing and joint movement are smoothly controlled in synchrony with voluntary control mode and without assistance.
- ③
- Assist level: The settings for the hip and knee joint actuators can each be adjusted across a range of 0–20 levels. An assistance level can indicate an assist torque value if a myoelectric potential value is described. The assist torque is defined as an assist level multiplied by the myoelectric potential value.
2.2.2. Robotic Lower-Limb Exoskeletons and Device–Wearer Fit
2.3. Trial Conditions
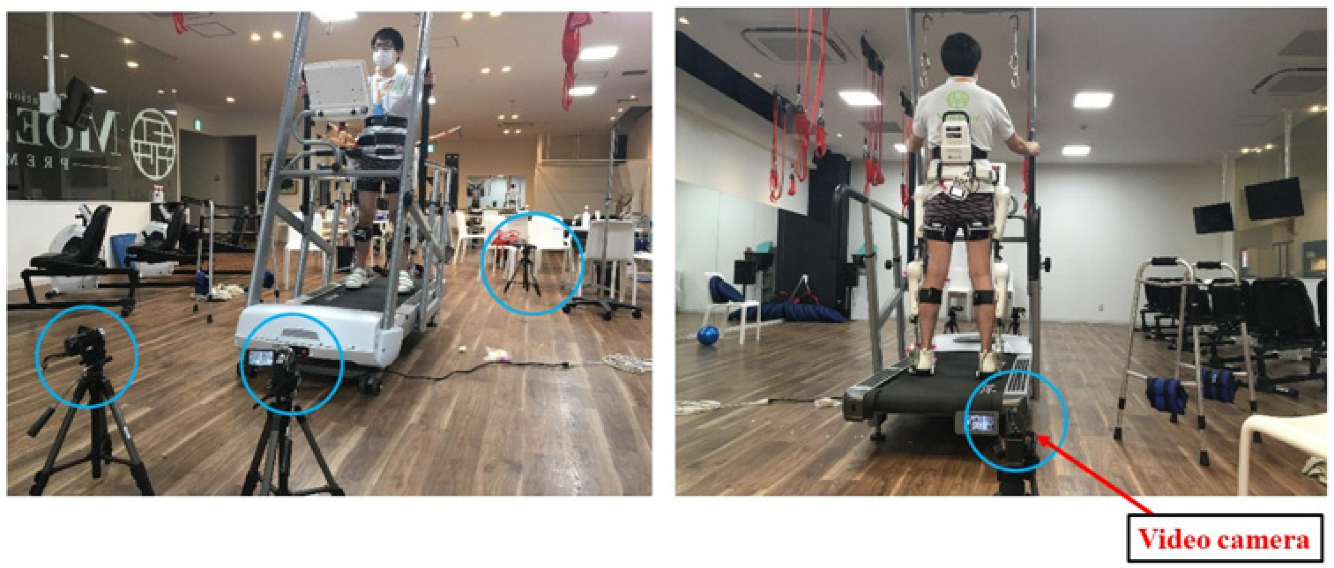
2.4. Reflective Markers
2.5. Analysis Methodology
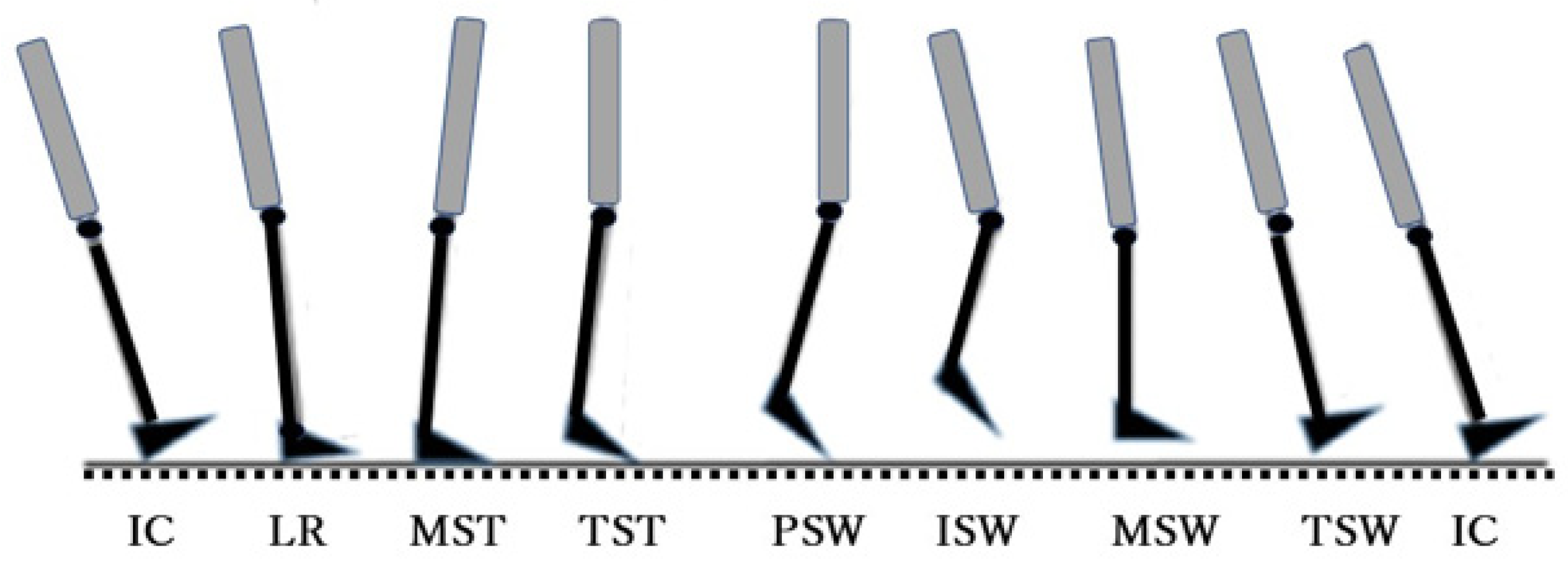
2.5.1. The Gait Cycle
2.5.2. Device–Wearer Misalignment
2.6. Statistical Methodology
3. Results
3.1. Precision of Misalignment Data
3.2. Peak Knee Misalignment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Internal Affairs and Communications. Japan: Healthcare policy. 2020.3.27. Available online: https://www.soumu.go.jp/main_sosiki/joho_tsusin/eng/whitepaper/2020/ (accessed on 28 February 2022).
- Ministry of Health, Labour and Welfare. Japan: Annual Health, Labour and Welfare Report 2020, 2020.10.23. Available online: https://www.mhlw.go.jp/english/wp/wp-hw13/ (accessed on 28 February 2022).
- Ministry of Health, Labour and Welfare. Japan: Annual Health, Labour and Welfare Report 2021, [2] Health and Medical Services, 2021.07.30. Available online: https://www.mhlw.go.jp/english/wp/wp-hw14/dl/02e.pdf (accessed on 28 February 2022).
- Wirz, M.; Zemon, D.H.; Rupp, R.; Scheel, A.; Colombo, G.; Dietz, V.; Hornby, T.G. Effectiveness of automated locomotor training in patients with chronic incomplete spinal cord injury: A multicenter trial. Arch. Phys. Med. Rehabil. 2005, 86, 672–680. [Google Scholar] [CrossRef] [PubMed]
- Hesse, S.; Uhlenbrock, D. A mechanized gait trainer for restoration of gait. J. Rehabil. Res. Dev. 2000, 37, 701–708. [Google Scholar] [PubMed]
- Sankai, Y.; Suzuki, K.; Hasegawa, Y. (Eds.) Cybernics: Fusion of Human, Machine and Information Systems; Springer: Tokyo, Japan, 2014. [Google Scholar]
- Duddy, D.; Doherty, R.; Connolly, J.; McNally, S.; Loughrey, J.; Faulkner, M. The effects of powered exoskeleton gait training on cardiovascular function and gait performance: A systematic review. Sensors 2021, 21, 3207. [Google Scholar] [CrossRef] [PubMed]
- Duschau-Wicke, A.; Zitzewitz, J.V.; Caprez, A.; Lunenburger, L.; Riener, R. Path control: A method for patient-cooperative robot-aided gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 38–48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cai, L.L.; Fong, A.J.; Otoshi, C.K.; Liang, Y.; Burdick, J.W.; Roy, R.R.; Edgerton, V.R. Implications of assist -as-needed robotic step training after a complete spinal cord injury on intrinsic strategies of motor learning. J. Neurosci. 2006, 26, 10564–10568. [Google Scholar] [CrossRef]
- Kawamoto, H.; Kamibayashi, K.; Nakata, Y.; Yamawaki, K.; Ariyasu, R.; Sankai, Y.; Sakane, M.; Eguchi, K.; Ochiai, N. Pilot study of locomotion improvement using hybrid assistive limb in chronic stroke patients. BMC Neurol. 2013, 13, 141. [Google Scholar] [CrossRef] [Green Version]
- Kawamoto, H.; Taal, S.; Niniss, H.; Hayashi, T.; Kamibayashi, K.; Eguchi, K.; Sankai, Y. Voluntary motion support control of Robot Suit HAL triggered by bioelectrical signal for hemiplegia. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2010, 2010, 462–466. [Google Scholar]
- Chang, W.H.; Kim, Y.H. Robot-assisted Therapy in Stroke Rehabilitation. J. Stroke 2013, 15, 174–181. [Google Scholar] [CrossRef]
- Gassert, R.; Dietz, V. Rehabilitation robots for the treatment of sensorimotor deficits: A neurophysiological perspective. J. Neuroeng. Rehabil. 2018, 15, 46. [Google Scholar] [CrossRef] [Green Version]
- Wall, A.; Borg, J.; Palmcrantz, S. Clinical application of the Hybrid Assistive Limb (HAL) for gait training a systematic review. Front. Syst. Neurosci. 2015, 9, 48. [Google Scholar] [CrossRef] [Green Version]
- Mehrholz, J.; Thomas, S.; Werner, C.; Kugler, J.; Pohl, M.; Elsner, B. Electromechanical -assisted training for walking after stroke. Cochrane Database Syst. Rev. 2017, 5, CD006185. [Google Scholar] [PubMed]
- Herzog, W.; Nigg, B.M.; Read, L.J.; Olsson, E. Asymmetries in ground reaction forces patterns in normal human gait. Med. Sci. Sports Exerc. 1989, 21, 110–114. [Google Scholar] [CrossRef] [PubMed]
- Kubota, S.; Nakata, Y.; Eguchi, K.; Kawamoto, H.; Kamibayashi, K.; Sakane, M.; Sankai, Y.; Ochiai, N. Feasibility of rehabilitation training with a newly developed wearable robot for patients with limited mobility. Arch. Phys. Med. Rehabil. 2013, 94, 1080–1087. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perry, J.; Burnfield, J.M. Gait Analysis: Normal and Pathological Function, 2nd ed.; Slack Inc.: West Deptford, NJ, USA, 2010. [Google Scholar]
- Wobbrock, J.O.; Findlater, L.; Gergle, D.; Higgins, J.J. The aligned rank transform for nonparametric factorial analyses using only anova procedures. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, New York, NY, USA, 7–12 May 2011; pp. 143–146. [Google Scholar]
- Lenth, R.V. Least-squares means: The R package lsmeans. J. Stat. Softw. 2016, 69, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Lenth, R.V.; Singmann, H.; Love, J.; Buerkner, P.; Herve, M. Emmeans: Estimated Marginal Means, Aka Least-Squares Means, R package version; CRAN: Windhoek, Namibia, 2018. [Google Scholar]
- Pearson, K. Mathematical contributions to the theory of evolution. III. Regression, heredity, and panmixia. Contain. Pap. A Math. Or Phys. Character Ser. A 1896, 187, 253–318. [Google Scholar]
- Chattopadhyay, B.; Kelley, K. Estimation of the coefficient of variation with minimum risk: A sequential method for minimizing sampling error and study cost. Multivar. Behav. Res. 2016, 51, 627–648. [Google Scholar] [CrossRef]
- Hopkins, W.G. Measures of reliability in sports medicine and science. Sports Med. 2000, 30, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Neumann, D.A.; Andrew, P.D. Kinesiology of the Musculoskeletal System: Foundations for Rehabilitation, 3rd ed.; C.V. Mosby CO.: Maryland Heights, MO, USA, 2018. [Google Scholar]
- Bessler, J.; Prange-Lasonder, G.B.; Schaake, L.; Saenz, J.F.; Bidard, C.; Fassi, I.; Valori, M.; Lassen, A.B.; Buurke, J.H. Safety assessment of rehabilitation robots: A review identifying safety skills and current knowledge gaps. Front. Robot. AI 2021, 8, 602878. [Google Scholar] [CrossRef]
- Näf, M.B.; Junius, K.; Rossini, M.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Misalignment compensation for full human-exoskeleton kinematic compatibility: State of the art and evaluation. Appl. Mech. Rev. 2018, 70, 050802. [Google Scholar] [CrossRef] [Green Version]
- Bessler-Etten, J.; Schaake, L.; Prange-Lasonder, G.B.; Buurke, J.H. Assessing effects of exoskeleton misalignment on knee joint load during swing using an instrumented leg simulator. J. NeuroEng. Rehabil. 2022, 19, 13. [Google Scholar] [CrossRef]
- Van Herpen, F.H.M.; van Dijsseldonk, R.B.; Rijken, H.; Keijsers, N.L.W.; Louwerens, J.W.K.; van Nes, I.J.W. Case report: Description of two fractures during the use of a powered exoskeleton. Spinal Cord Ser. Cases 2019, 5, 99. [Google Scholar] [CrossRef] [PubMed] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Assist Condition | Assist Level (0, 1, 3) | |
|---|---|---|
| HIP | KNEE | |
| NO ASSIST | 0 | 0 |
| HIP1 | 1 | 0 |
| HIP3 | 3 | 0 |
| KNEE1 | 0 | 1 |
| KNEE3 | 0 | 3 |
| HIP1KNEE1 | 1 | 1 |
| HIP3KNEE3 | 3 | 3 |
| HAL® knee joint angle: HAL® hip joint—HAL® knee joint—HAL® ankle joint |
| Body knee joint angle: HAL® hip joint—body lateral aspect of knee—body lateral malleolus |
| HAL® ankle joint angle: HAL® knee joint—HAL® ankle joint—HAL® 5th metatarsal head |
| Body ankle joint angle: body lateral aspect of knee—body lateral malleolus—HAL® 5th metatarsal head |
| IC | LR | MST | TST | PSW | ISW | MSW | TSW | |
|---|---|---|---|---|---|---|---|---|
| CV (%) | 2.6 | 2.9 | 3.3 | 3.4 | 4.1 | 2.9 | 2.7 | 2.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanaka, T.; Matsumura, R.; Miura, T. Influence of Varied Load Assistance with Exoskeleton-Type Robotic Device on Gait Rehabilitation in Healthy Adult Men. Int. J. Environ. Res. Public Health 2022, 19, 9713. https://doi.org/10.3390/ijerph19159713
Tanaka T, Matsumura R, Miura T. Influence of Varied Load Assistance with Exoskeleton-Type Robotic Device on Gait Rehabilitation in Healthy Adult Men. International Journal of Environmental Research and Public Health. 2022; 19(15):9713. https://doi.org/10.3390/ijerph19159713
Chicago/Turabian StyleTanaka, Toshiaki, Ryo Matsumura, and Takahiro Miura. 2022. "Influence of Varied Load Assistance with Exoskeleton-Type Robotic Device on Gait Rehabilitation in Healthy Adult Men" International Journal of Environmental Research and Public Health 19, no. 15: 9713. https://doi.org/10.3390/ijerph19159713
APA StyleTanaka, T., Matsumura, R., & Miura, T. (2022). Influence of Varied Load Assistance with Exoskeleton-Type Robotic Device on Gait Rehabilitation in Healthy Adult Men. International Journal of Environmental Research and Public Health, 19(15), 9713. https://doi.org/10.3390/ijerph19159713