
Physical Activity and Ecological Means of Transport—Functional Assessment Methodology


Abstract
:1. Introduction
2. Overview of Individual Environmentally Friendly Means of Transport
3. Research Object
4. Materials and Methods
4.1. Aim and Scope of the Research
- Lumbar Flexion
- Lumbar Lateral
- Lumbar Axial
- Thoracic Flexion
- Thoracic Lateral
- Thoracic Axial
- Elbow Flexion
- Shoulder Total Flexion
- Shoulder Flexion
- Shoulder Abduction
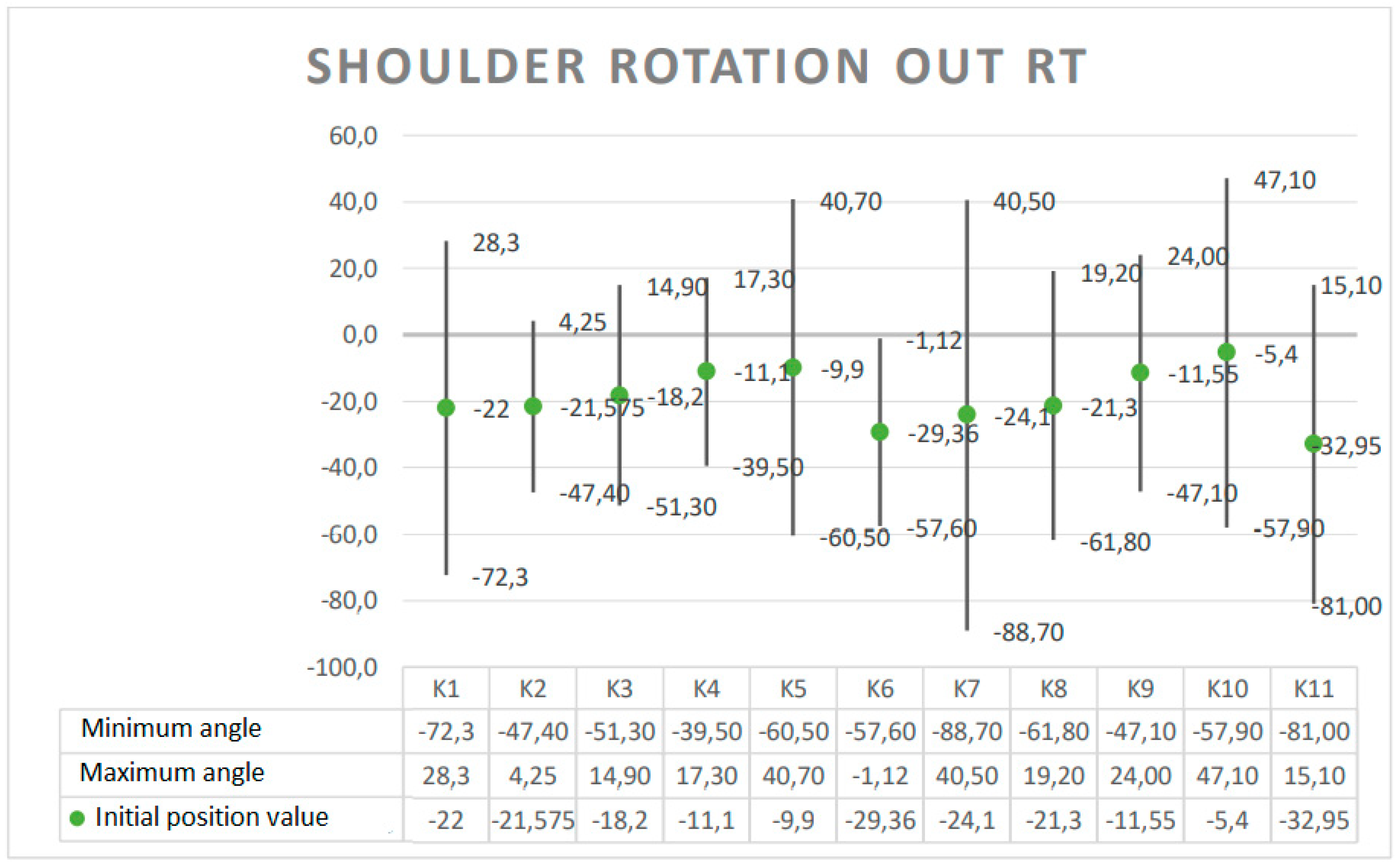
- Shoulder Rotation out
- Hip Flexion
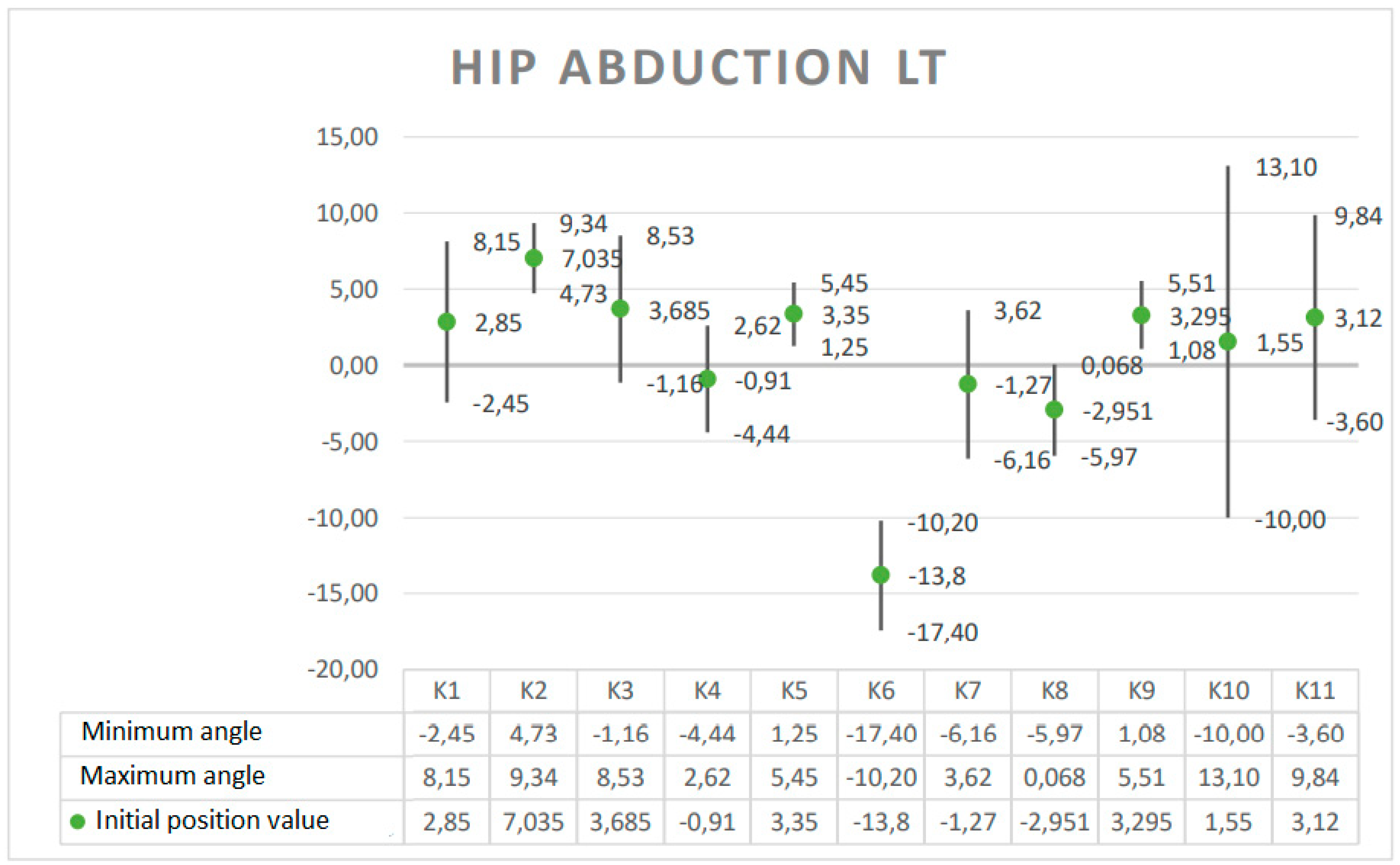
- Hip Abduction
- Hip Rotation out
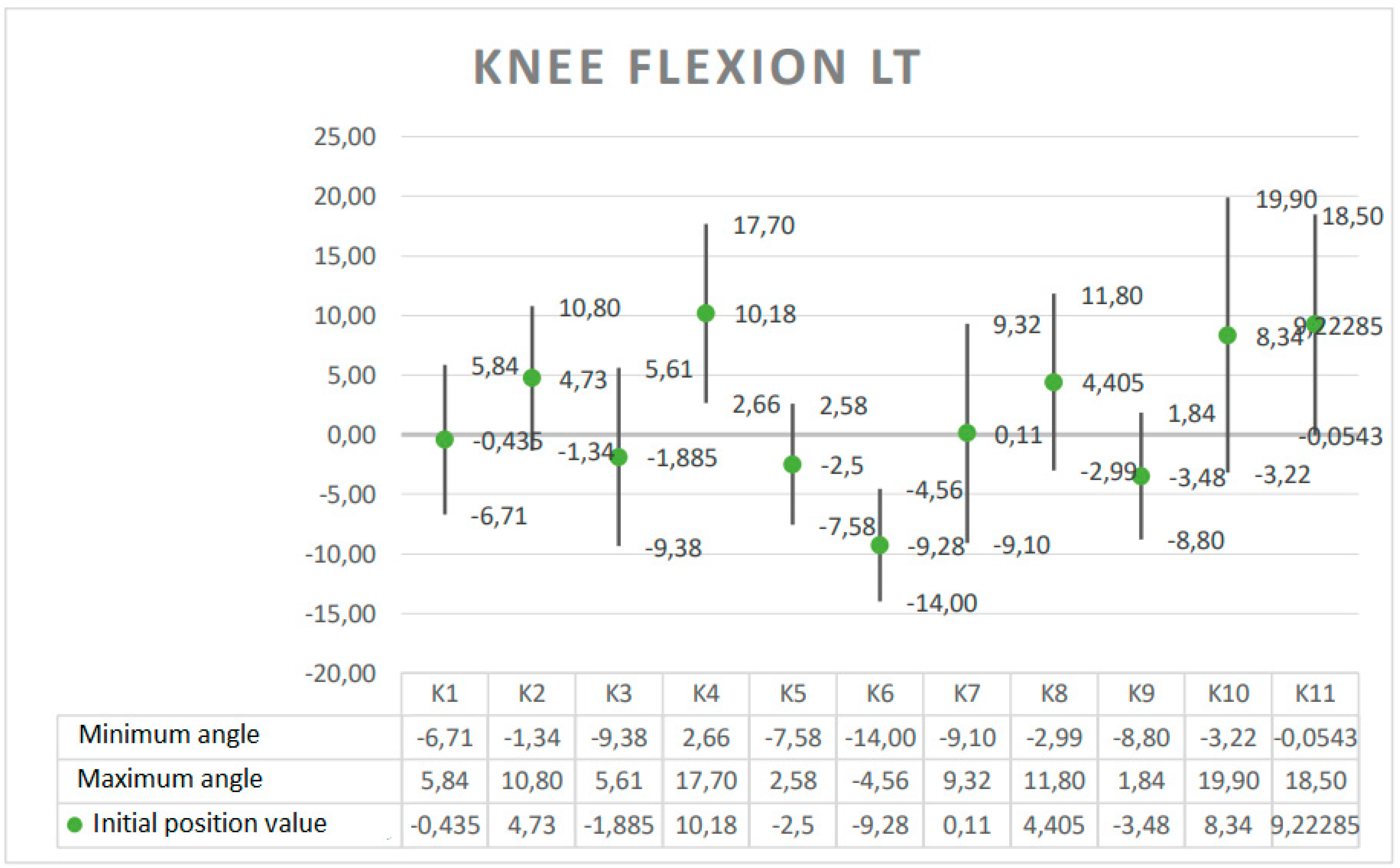
- Knee Flexion
4.2. Description of the Myo Motion System Used for Testing
4.3. Test Procedure
5. Results
6. Discussion
Limitations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Conserve Energy Future. What Is Green Transportation? Available online: https://www.conserve-energy-future.com/modes-and-benefits-of-green-transportation.php (accessed on 5 July 2022).
- E-Scooter Findings Report 2018. PBOT (Portland Bureau of Transportation). Available online: https://www.portlandoregon.gov/transportation/article/709719 (accessed on 4 July 2022).
- Siramy, A. How Choice Makes City Transportation Smart and Sustainable. 2018. Available online: https://www.smartcitiesdive.com/news/how-choice-makes-city-transportation-smart-and-sustainable/515246/ (accessed on 5 July 2022).
- Quaium, R. Sustainable Urban Transportation Systems, United Nations Economic and Social Commission for Asia and the Pacific ESCAP and CITYNET. 2012. Available online: https://www.uncclearn.org/sites/default/files/inventory/unescap20_0.pdf (accessed on 12 January 2020).
- Edaño, D. Urban Transport Problems. Engineering. 2014. Available online: https://www.slideshare.net/paojean2000/urban-transport-problems (accessed on 12 January 2020).
- Available online: https://www.epa.gov/transportation-air-pollution-and-climate-change/history-reducing-air-pollution-transportation (accessed on 5 July 2022).
- International Council on Clean Transportation. A Global Snapshot of the Air Pollution-Related Health Impacts of Transportation Sector Emissions in 2010 and 2015; International Council on Clean Transportation: Washington, DC, USA, 2019; Available online: https://theicct.org/publications/health-impacts-transport-emissions-2010-2015 (accessed on 4 April 2022).
- Khardi, S.; Bernoud-Hubac, N. Editorial for the Special Issue “Impacts of Transport Systems on Air Pollution and Human Health”. Atmosphere 2022, 13, 1060. [Google Scholar] [CrossRef]
- Mehlig, D.; Woodward, H.; Oxley, T.; Holland, M.; ApSimon, H. Electrification of Road Transport and the Impacts on Air Quality and Health in the UK. Atmosphere 2021, 12, 1491. [Google Scholar] [CrossRef]
- Bęczkowska, S.A.; Zysk, Z. Safety of People with Special Needs in Public Transport. Sustainability 2021, 13, 10733. [Google Scholar] [CrossRef]
- Implementation of the World Programme of Action Concerning Disabled Persons [1982] UNGA 68; A/RES/37/53. 3 December 1982. Available online: http://www.worldlii.org/int/other/UNGA/1982/57.pdf (accessed on 26 September 2021).
- World Bank; World Health Organization. The World Report on Disability. 2011. Available online: http://www.who.int/disabilities/world_report/2011/en (accessed on 5 April 2021).
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- International Energy Agency. Trends and Developments in Electric Vehicle Markets. In Global EV Outlook 2021; IEA: Paris, France, 2021; Available online: https://www.iea.org/reports/global-ev-outlook-2021/trends-and-developments-in-electric-vehicle-markets (accessed on 8 April 2022).
- Torqway. Available online: https://torqway.com/en (accessed on 10 May 2022).
- Segway. Available online: https://pl-pl.segway.com/ (accessed on 10 May 2022).
- Altinsoy, M.E. The Evaluation of Conventional, Electric and Hybrid Electric Passenger Car Pass-By Noise Annoyance Using Psychoacoustical Properties. Appl. Sci. 2022, 12, 5146. [Google Scholar] [CrossRef]
- Neufville, R.; Abdalla, H.; Abbas, A. Potential of Connected Fully Autonomous Vehicles in Reducing Congestion and Associated Carbon Emissions. Sustainability 2022, 14, 6910. [Google Scholar] [CrossRef]
- Boglietti, S.; Barabino, B.; Maternini, G. Survey on e-Powered Micro Personal Mobility Vehicles: Exploring Current Issues towards Future Developments. Sustainability 2021, 13, 3692. [Google Scholar] [CrossRef]
- Al Mamun, A.; Zainol, N.R.; Hayat, N. Electric Scooter-An Alternative Mode of Transportation for Malaysian Youth. 2020. Available online: https://www.researchgate.net/publication/346686997_Electric_Scooter_-_An_Alternative_Mode_of_Transportation_for_Malaysian_Youth (accessed on 10 May 2022).
- Oxley, J.; Logan, D.B.; Coxon, S.; Koppel, S. Understanding Current and Future Transport Needs of Older Australian Drivers to Guide Development of Sustainable and Smart Initiatives to Support Safe Mobility of Older Adults. Sustainability 2022, 14, 5906. [Google Scholar] [CrossRef]
- Kmag. Available online: https://kmag.pl/article/lime-w-polsce (accessed on 9 May 2022).
- Lime. Available online: https://www.li.me/ (accessed on 9 May 2022).
- Electro Mobility. Available online: https://mycompanypolska.pl/artykul/raport-elektromobilnosc-hulajnoga-do-celu-czyli-wygodny-transport-w-miastach/8015 (accessed on 10 May 2022).
- Bolt. Available online: https://www.bolt.eu/ (accessed on 9 May 2022).
- Van den Steen, N.; de Geus, B.; Cappelle, J.; Vanhaverbeke, L. Cycling Infrastructure for All EPACs Included? World Electr. Veh. J. 2022, 13, 74. [Google Scholar] [CrossRef]
- Reck, D.J.; Martin, H.; Axhausen, K.W. Mode choice, substitution patterns and environmental impacts of shared and personal micro-mobility. Transp. Res. Part D Transp. Environ. 2022, 102, 103–134. [Google Scholar] [CrossRef]
- Rose, G. E-bikes and urban transportation: Emerging issues and unresolved questions. Transportation 2012, 39, 81–96. [Google Scholar] [CrossRef]
- ReportBuyer. Personal Mobility Devices Market—Global Industry Analysis, Size, Share, Growth, Trends, and Forecast, 2019–2027. Available online: https://www.reportbuyer.com/product/4142781/personal-mobility-devices-market-global-industry-analysis-size-share-growth-trends-and-forecast-2019-2027.html?utm_source=PRN (accessed on 4 March 2022).
- Howe, E.; Bock, B. InnoZ-Innovation Centre for Mobility and Societal Change (InnoZ). In Global Scootersharing Market Report 2018; GmbH: Berlin, Germany, 2018. [Google Scholar]
- Kim, B.W.; Park, B.S. Robust Control for the Segway with Unknown Control Coefficient and Model Uncertainties. Sensors 2016, 16, 1000. [Google Scholar] [CrossRef] [PubMed]
- Jamerson, F.E.; Benjamin, E. Worldwide Electric Powered Two Wheel Market. World Electr. Veh. J. 2012, 5, 269–275. [Google Scholar] [CrossRef]
- Zagorskas, J.; Burinskienė, M. Challenges Caused by Increased Use of E-Powered Personal Mobility Vehicles in European Cities. Sustainability 2020, 12, 273. [Google Scholar] [CrossRef] [Green Version]
- Noraxon. Available online: https://www.noraxon.com/our-products/myomotion/ (accessed on 25 May 2022).
- Triantafyllou, A.; Papagiannis, G.; Stasi, S.; Bakalidou, D.; Kyriakidou, M.; Papathanasiou, G.; Papadopoulos, E.C.; Papagelopoulos, P.J.; Koulouvaris, P. Application of Wearable Sensors Technology for Lumbar Spine Kinematic Measurements during Daily Activities following Microdiscectomy Due to Severe Sciatica. Biology 2022, 11, 398. [Google Scholar] [CrossRef] [PubMed]
- Che-Nan, H.; Rambely, A.S. Kinematic Analysis of Daily Activity of Touching Lateral Shoulder for Normal Subjects. Appl. Sci. 2022, 12, 2069. [Google Scholar] [CrossRef]
- Ferguson, B. ACSM’s Guidelines for Exercise Testing and Prescription 9th Ed. 2014. J. Can. Chiropr. Assoc. 2014, 58, 328. [Google Scholar]
- Pasanen, T.P.; Tyrväinen, L.; Korpela, K.M. The Relationship between Perceived Health and Physical Activity Indoors, Outdoors in Built Environments, and Outdoors in Nature. Appl. Psychol. Health Well Being 2014, 6, 324–346. [Google Scholar] [CrossRef] [Green Version]
- Yu, G.; Jang, Y.J.; Kim, J.; Kim, J.H.; Kim, H.Y.; Kim, K.; Panday, S.B. Potential of IMU Sensors in Performance Analysis of Professional Alpine Skiers. Sensors 2016, 16, 463. [Google Scholar] [CrossRef] [Green Version]
- Bańkosz, Z.; Winiarski, S. Kinematics of table tennis racket. Differences between topspin shots. J. Sports Med. Phys. Fit. 2017, 57, 202–213. [Google Scholar]
- Alrawashdeh, W.; Siebers, H.L.; Reim, J.; Rath, B.; Tingart, M.; Eschweiler, J. Gait symmetry—A valid parameter for pre and post planning for total knee arthroplasty. J. Musculoskelet. Neuronal Interact. 2021, 22, 102–112. [Google Scholar]
- Di Paolo, S.; Lopomo, N.F.; Della Villa, F.; Paolini, G.; Figari, G.; Bragonzoni, L.; Grassi, A.; Zaffagnini, S. Rehabilitation and Return to Sport Assessment after Anterior Cruciate Ligament Injury: Quantifying Joint Kinematics during Complex High-Speed Tasks through Wearable Sensors. Sensors 2021, 21, 2331. [Google Scholar] [CrossRef]
- Mundt, M.; Thomsen, W.; David, S.; Dupré, T.; Bamer, F.; Potthast, W.; Markert, B. Assessment of the measurement accuracy of inertial sensors during different tasks of daily living. J. Biomech. 2019, 84, 81–86. [Google Scholar] [CrossRef]
- Mundt, M.; Wisser, A.; David, S.; Dupré, T.; Quack, V.; Bamer, F.; Tingart, M.; Potthast, W.; Markert, B. The influence of motion tasks on the accuracy of kinematic motion patterns of an imu-based measurement system. In Proceedings of the 35th Conference of the International Society of Biomechanics in Sports, Cologne, Germany, 14–18 June 2017; pp. 817–820. [Google Scholar]
- Nüesch, C.; Roos, E.; Pagenstert, G.; Mündermann, A. Measuring joint kinematics of treadmill walking and running: Comparison between an inertial sensor based system and a camera-based system. J. Biomech. 2017, 57, 32–38. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63–N69. Available online: http://stacks.iop.org/0967-3334/34/i=8/a=N63?key=crossref.b8cddbd89301a6c8dae28bde2e307266 (accessed on 10 May 2022). [CrossRef]
- Ferrari, A.; Cutti, A.G.; Garofalo, P.; Raggi, M.; Heijboer, M.; Cappello, A.; Davalli, A. First in vivo assessment of outwalk: A novel protocol for clinical gait analysis based on inertial and magnetic sensors. Med. Biol. Eng. Comput. 2010, 48, 1–15. [Google Scholar] [CrossRef]
- Cloete, T.; Scheffer, C. Benchmarking of a full-body inertial motion capture system for clinical gait analysis. In Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 4579–4582. [Google Scholar]
- Picerno, P.; Cereatti, A.; Cappozzo, A. Joint kinematics estimate using wearable inertial and magnetic sensing modules. Gait Post. 2008, 28, 588–595. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Validation of inertial measurement units with an optoelectronic system for whole-body motion analysis. Med. Biol. Eng. Comput. 2016, 55, 609–619. [Google Scholar] [CrossRef]
- Kim, S.; Nussbaum, M.A. Performance evaluation of a wearable inertial motion capture system for capturing physical exposures during manual material handling tasks. Ergonomics 2013, 56, 314–326. [Google Scholar] [CrossRef]
- Mustonen, A.-M.; Käkelä, R.; Joukainen, A.; Lehenkari, P.; Jaroma, A.; Kääriäinen, T.; Kröger, H.; Paakkonen, T.; Sihvo, S.P.; Nieminen, P. Synovial Fluid Fatty Acid Profiles Are Differently Altered by Inflammatory Joint Pathologies in the Shoulder and Knee Joints. Biology 2021, 10, 401. [Google Scholar] [CrossRef]
- Samotus, O.; Lee, J.; Jog, M. Developing a Consistent, Reproducible Botulinum Toxin Type A Dosing Method for Upper Limb Tremor by Kinematic Analysis. Toxins 2021, 13, 264. [Google Scholar] [CrossRef]
- Pérez-de la Cruz, S. Use of a Portable Inertial Measurement Unit as an Evaluation Method for Supraspinatus Muscle: Proposed Normative Values. Sensors 2021, 21, 7723. [Google Scholar] [CrossRef] [PubMed]
- Limacher, M.; Pina, I.L.; Southard, D.; Williams, M.A.; Bazzarre, T. Guidelines for Cardiac Rehabilitation and Secondary Prevention Programs, 3rd ed.; Human Kinetics Publishers: Champaign, IL, USA, 1999. [Google Scholar]
- Westcott, W.L. Resistance training is medicine: Effects of strength training on health. Curr. Sports Med. Rep. 2012, 11, 209–216. [Google Scholar] [CrossRef]
- Chèze, L. Kinematic Analysis of Human Movement; Focus bioengineering and health science series; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Respondent | Age | Height (cm) | Weight (kg) | BMI |
|---|---|---|---|---|
| k1 | 54 | 165 | 72 | 26.45 |
| k2 | 54 | 164 | 79 | 29.37 |
| k3 | 52 | 153 | 62 | 26.49 |
| k4 | 59 | 162 | 69 | 26.29 |
| k5 | 62 | 165 | 63 | 23.14 |
| k6 | 50 | 167 | 90 | 32.27 |
| k7 | 57 | 166 | 69 | 25 |
| k8 | 50 | 170 | 57 | 19.7 |
| k9 | 52 | 164 | 57 | 21.2 |
| k10 | 58 | 161,5 | 62 | 23.92 |
| k11 | 50 | 170 | 72 | 24.91 |
| Characteristics | |
|---|---|
| Dimensions | 37.6 mm (L) × 52 mm (W) × 18.1 mm (H) |
| Weight | Less than 34 g |
| Output & Transmission Frequency | Up to 2.5 mW |
| DSSS 2415–2472 MHz on (up to) 8 selectable radio channels | |
| Utilizing up to 4 different radio frequencies on each channel | |
| Signal latency of 140 ms during data collection | |
| sensor transmission range: 30 m | |
| X, Y, Z acceleration sampled at: | Low g accelerometer: 800 Hz |
| High g accelerometer: 400 Hz | |
| X, Y, Z angular velocity sampled at: | Low speed gyro: 800 Hz |
| High speed gyro: 400 Hz | |
| X, Y, Z magnetic field sampled: | 50 Hz |
| Accuracy | +/−1 degree in vertical plane, +/−2 degrees in horizontal plane |
| Battery life | 8 h, 3 h charge time |
| Sample rates | 100 Hz and 200 Hz |
| Other | Fully wireless Inertial Measurement Sensor |
| 2.4 GHz unlicensed radio |
| Cervical (°) | Thoracic (°) | Lumbar (°) | Hips (°) (Excluding ab and Adduction) | |
|---|---|---|---|---|
| Flexion | 0–60 | 0–50 | 0–60 | 0–110 |
| Extension | 0–75 | 0–45 | 0–25 | 0–30 |
| Lateral Flexion | 0–45 | 0–40 | 0–25 | n/a |
| Rotation | 0–80 | 0–30 | 0–18 | Internal = 0–40 External = 0–50 |
| Range of Motion | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 | K9 | K10 | K11 | |
| Lumbar Flexion | 8.78 | 11.51 | 13.09 | 13.53 | 10.16 | 6.79 | 10.80 | 8.29 | 11.14 | 14.26 | 20.32 |
| Lumbar Lateral RT | 6.09 | 5.26 | 7.14 | 7.19 | 8.28 | 5.83 | 5.42 | 5.48 | 4.51 | 13.50 | 8.31 |
| Lumbar Axial RT | 34.10 | 12.92 | 23.64 | 25.10 | 37.60 | 8.90 | 7.70 | 23.28 | 15.01 | 28.90 | 25.69 |
| Thoracic Flexion | 11.77 | 11.85 | 22.72 | 15.55 | 16.62 | 9.36 | 29.10 | 14.62 | 30.70 | 37.90 | 33.09 |
| Thoracic Lateral RT | 11.66 | 8.08 | 17.07 | 12.16 | 11.48 | 9.81 | 24.07 | 9.69 | 16.27 | 16.16 | 16.44 |
| Thoracic Axial RT | 27.37 | 11.22 | 25.59 | 15.48 | 14.69 | 12.34 | 51.50 | 29.12 | 36.19 | 43.30 | 16.10 |
| Elbow Flexion LT | 120.90 | 90.20 | 110.10 | 117.70 | 113.36 | 68.10 | 105.85 | 107.35 | 99.80 | 115.45 | 109.38 |
| Elbow Flexion RT | 115.30 | 91.21 | 108.90 | 69.80 | 123.10 | 59.80 | 128.50 | 103.52 | 79.90 | 109.50 | 130.17 |
| Shoulder Total Flexion LT | 42.70 | 39.28 | 54.11 | 41.07 | 47.56 | 32.50 | 55.15 | 39.70 | 42.80 | 68.19 | 63.09 |
| Shoulder Total Flexion RT | 51.03 | 40.42 | 44.80 | 41.89 | 55.61 | 34.54 | 52.89 | 41.26 | 45.97 | 57.02 | 66.42 |
| Shoulder Flexion LT | 89.20 | 60.00 | 62.83 | 47.30 | 58.02 | 39.66 | 89.10 | 69.70 | 79.30 | 84.90 | 86.10 |
| Shoulder Flexion RT | 85.90 | 59.00 | 53.55 | 56.50 | 80.50 | 42.48 | 101.90 | 60.40 | 90.60 | 90.60 | 83.20 |
| Shoulder Abduction LT | 58.30 | 21.23 | 54.00 | 52.80 | 42.10 | 26.66 | 66.10 | 35.55 | 35.83 | 53.90 | 40.30 |
| Shoulder Abduction RT | 47.40 | 22.79 | 44.03 | 24.06 | 66.20 | 20.35 | 80.40 | 33.90 | 40.00 | 56.20 | 51.96 |
| Shoulder Rotation out LT | 71.41 | 56.98 | 75.30 | 137.10 | 50.20 | 47.79 | 113.80 | 61.45 | 90.60 | 106.20 | 77.71 |
| Shoulder Rotation out RT | 100.60 | 51.65 | 66.20 | 56.80 | 101.20 | 56.48 | 129.20 | 81.00 | 71.10 | 105.00 | 96.10 |
| Hip Flexion LT | 11.11 | 5.77 | 15.61 | 10.60 | 6.00 | 7.73 | 21.20 | 10.74 | 8.68 | 25.09 | 17.58 |
| Hip Flexion RT | 12.46 | 8.76 | 10.79 | 11.27 | 8.77 | 8.48 | 28.67 | 12.40 | 9.74 | 30.96 | 14.16 |
| Hip Abduction LT | 10.60 | 4.61 | 9.69 | 7.06 | 4.20 | 7.20 | 9.78 | 6.04 | 4.43 | 23.10 | 13.44 |
| Hip Abduction RT | 10.08 | 5.40 | 11.51 | 4.81 | 4.21 | 3.49 | 10.86 | 7.24 | 10.12 | 18.58 | 11.65 |
| Hip Rotation out LT | 74.80 | 73.60 | 73.30 | 78.60 | 72.00 | 56.50 | 66.70 | 83.00 | 78.60 | 85.70 | 81.50 |
| Hip Rotation out RT | 82.30 | 48.00 | 111.00 | 98.00 | 62.50 | 81.57 | 99.20 | 44.00 | 50.40 | 79.70 | 65.40 |
| Knee Flexion LT | 12.55 | 12.14 | 14.99 | 15.04 | 11.84 | 9.44 | 18.42 | 14.79 | 10.64 | 23.12 | 18.55 |
| Knee Flexion RT | 13.18 | 10.50 | 14.93 | 14.16 | 10.31 | 7.74 | 24.51 | 14.65 | 16.48 | 20.47 | 17.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bęczkowska, S.A.; Grabarek, I.; Zysk, Z.; Gosek-Ferenc, K. Physical Activity and Ecological Means of Transport—Functional Assessment Methodology. Int. J. Environ. Res. Public Health 2022, 19, 9211. https://doi.org/10.3390/ijerph19159211
Bęczkowska SA, Grabarek I, Zysk Z, Gosek-Ferenc K. Physical Activity and Ecological Means of Transport—Functional Assessment Methodology. International Journal of Environmental Research and Public Health. 2022; 19(15):9211. https://doi.org/10.3390/ijerph19159211
Chicago/Turabian StyleBęczkowska, Sylwia Agata, Iwona Grabarek, Zuzanna Zysk, and Katarzyna Gosek-Ferenc. 2022. "Physical Activity and Ecological Means of Transport—Functional Assessment Methodology" International Journal of Environmental Research and Public Health 19, no. 15: 9211. https://doi.org/10.3390/ijerph19159211
APA StyleBęczkowska, S. A., Grabarek, I., Zysk, Z., & Gosek-Ferenc, K. (2022). Physical Activity and Ecological Means of Transport—Functional Assessment Methodology. International Journal of Environmental Research and Public Health, 19(15), 9211. https://doi.org/10.3390/ijerph19159211