
Analysis of EEG Characteristics of Drivers and Driving Safety in Undersea Tunnel



Abstract
:1. Introduction
2. Experimental Scheme Design
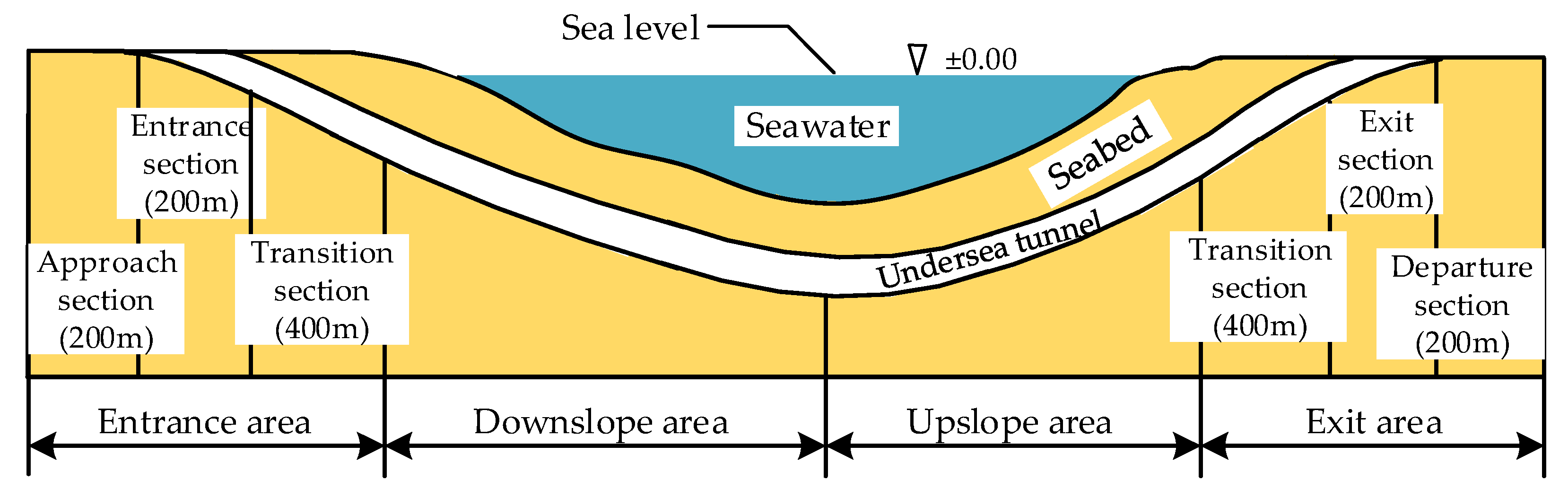
2.1. Experimental Tunnel
2.2. Experimental Equipment
2.3. Experiment Time and Driver
3. Results and Analysis
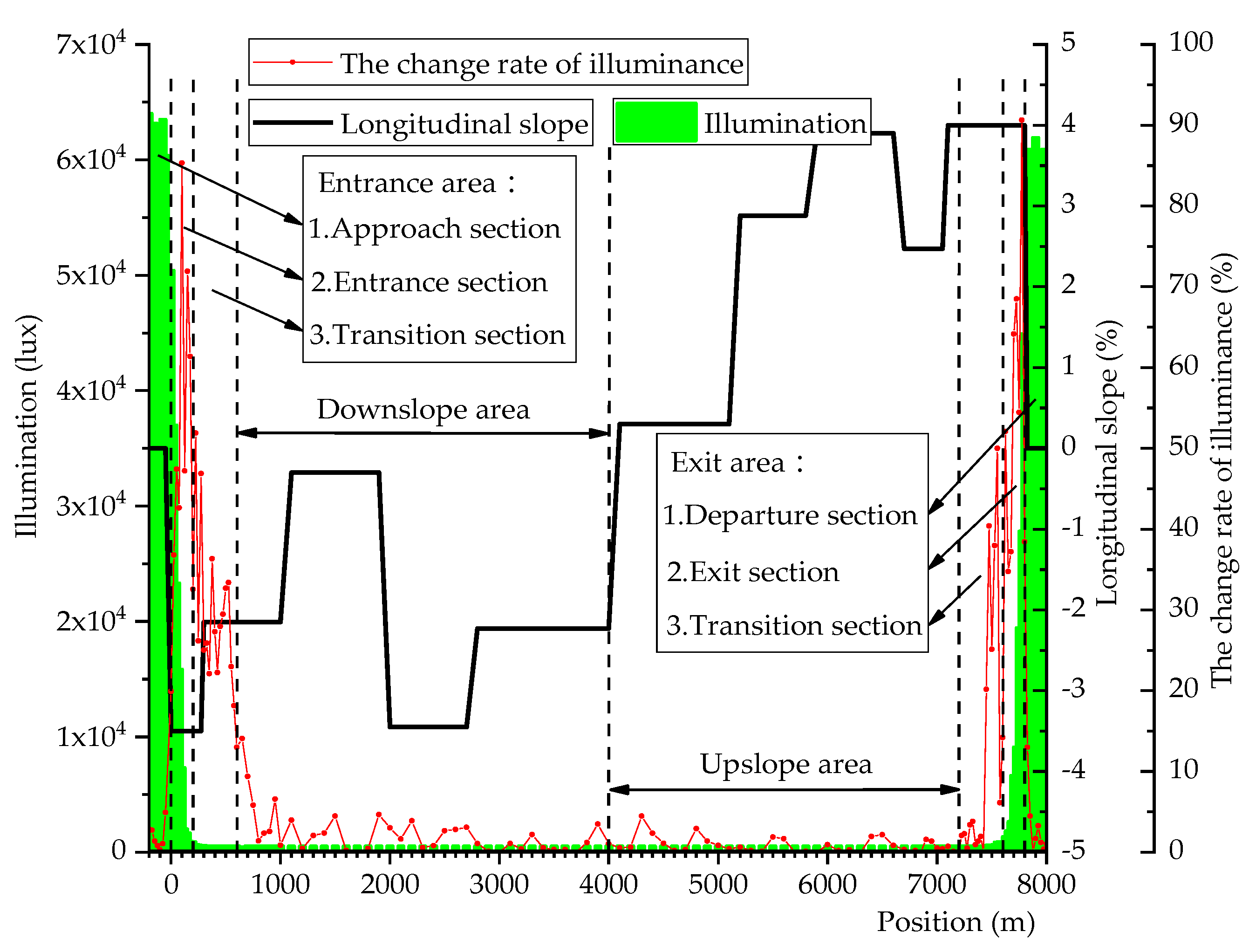
3.1. Analysis of Driving Environment Characteristics of the Undersea Tunnel
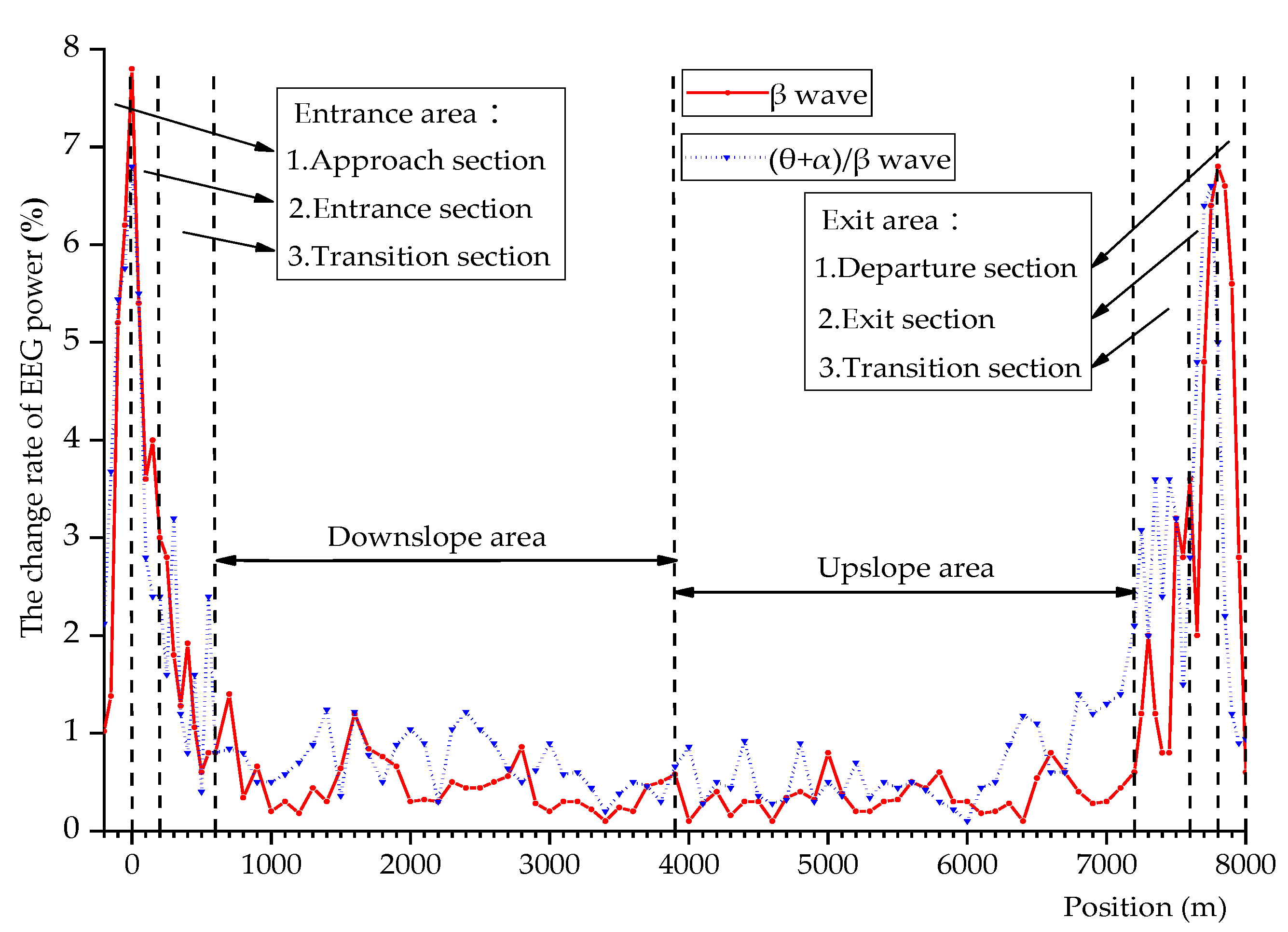
3.2. Analysis of EEG Characteristics
3.3. Analysis of Speed Characteristics
4. Correlation Analysis and Modeling
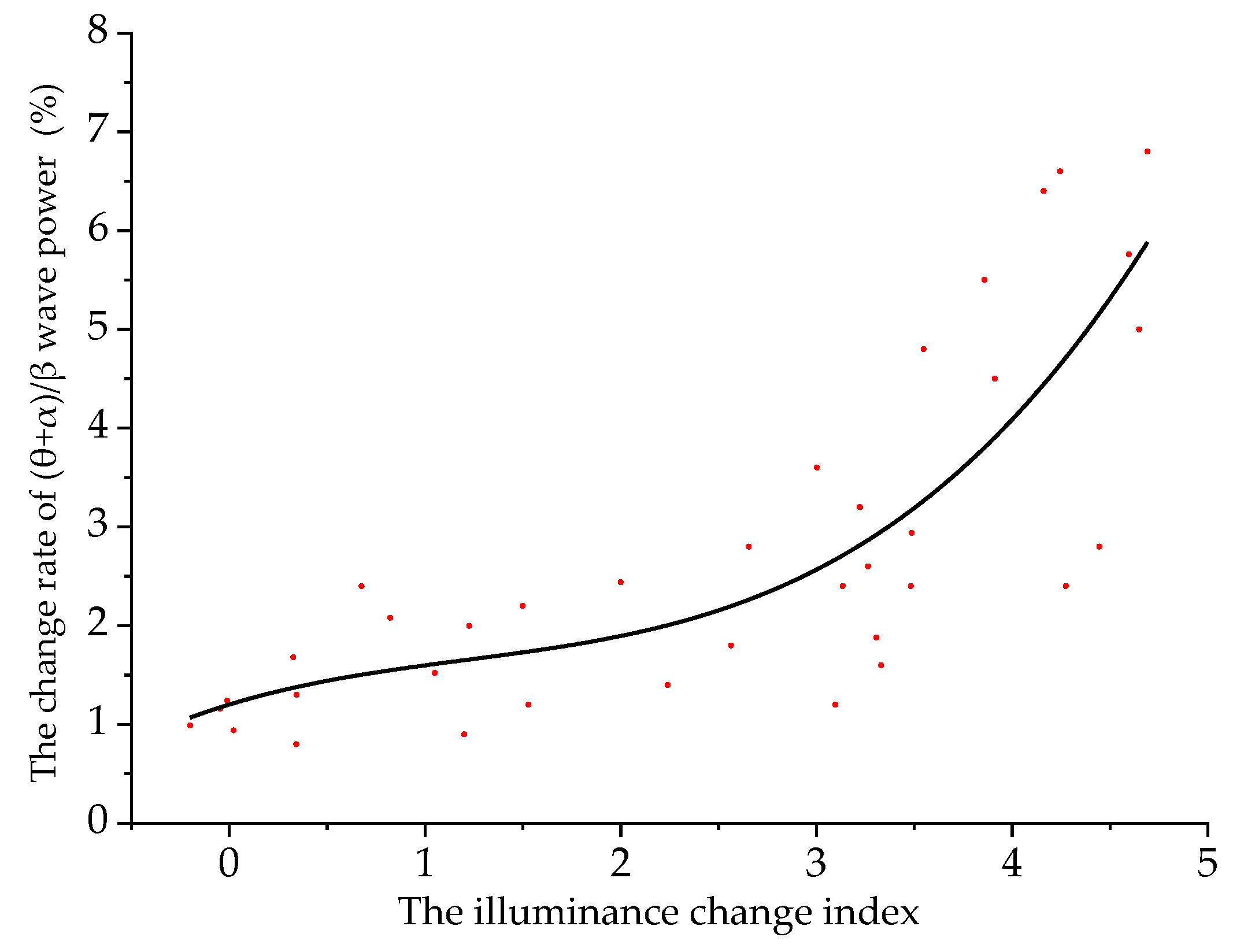
4.1. Correlation Analysis
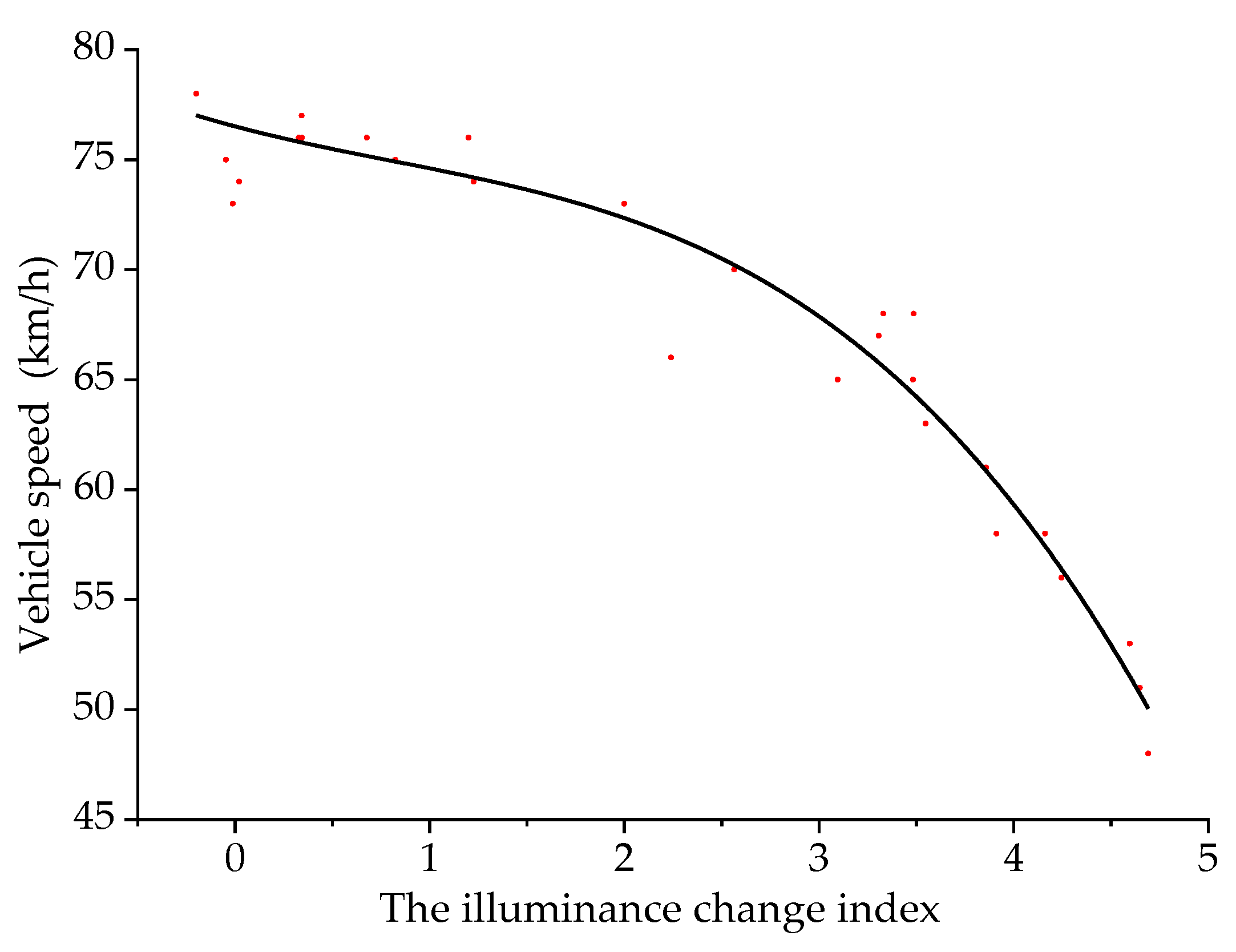
4.2. Illumination Change Model
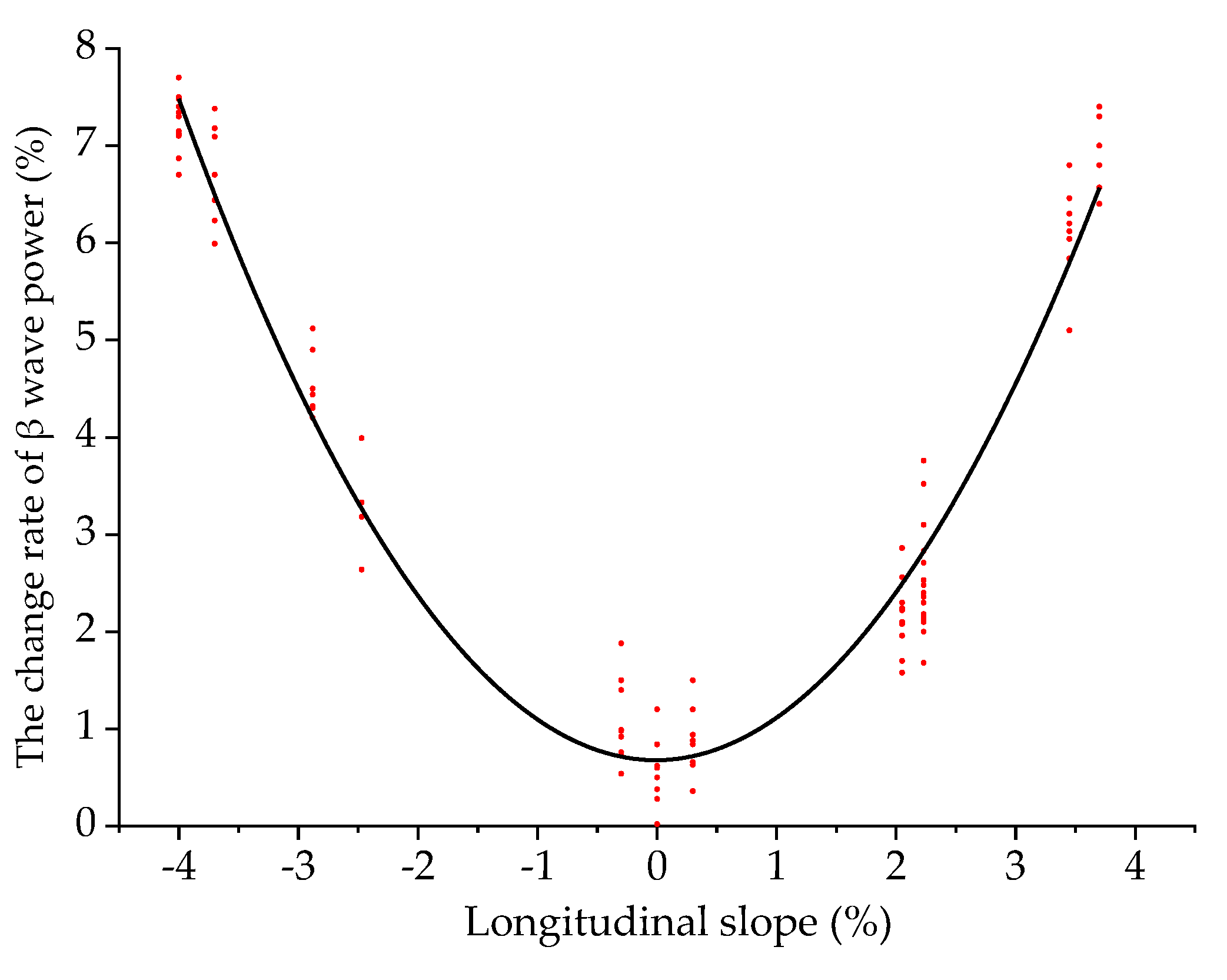
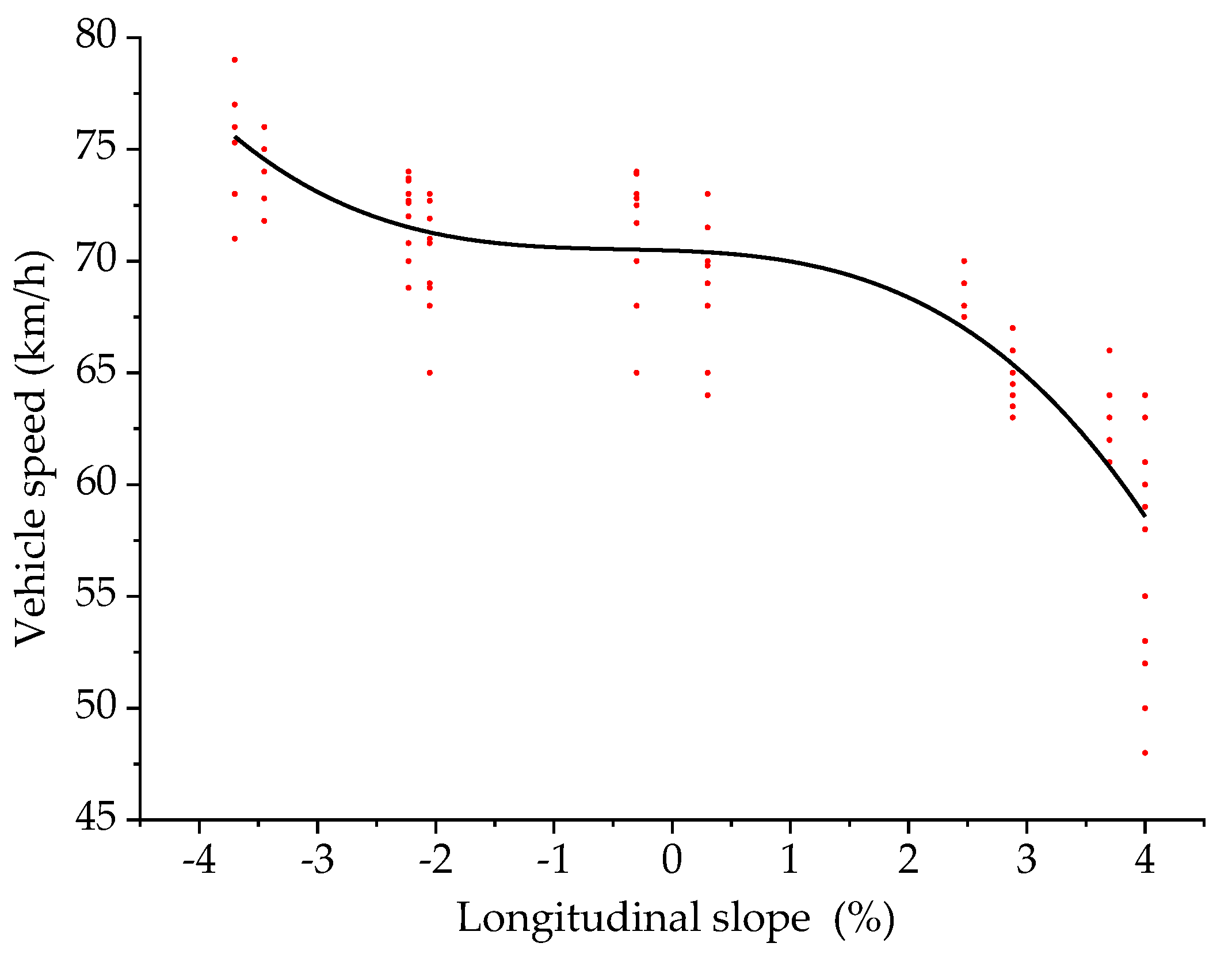
4.3. Longitudinal Slope Change Model
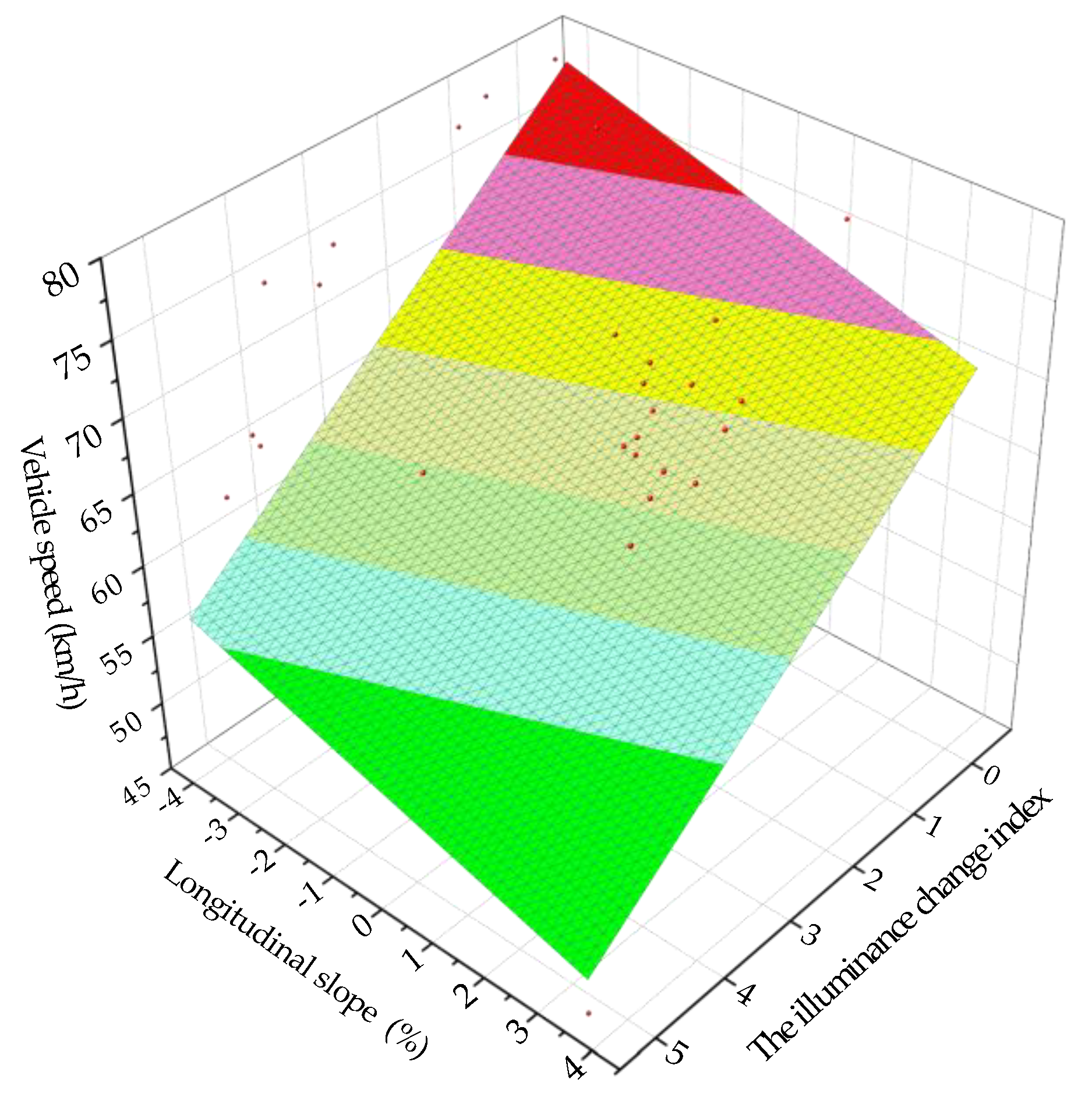
4.4. Parameter Change Model under the Coupling Effect of Illuminance and Longitudinal Slope
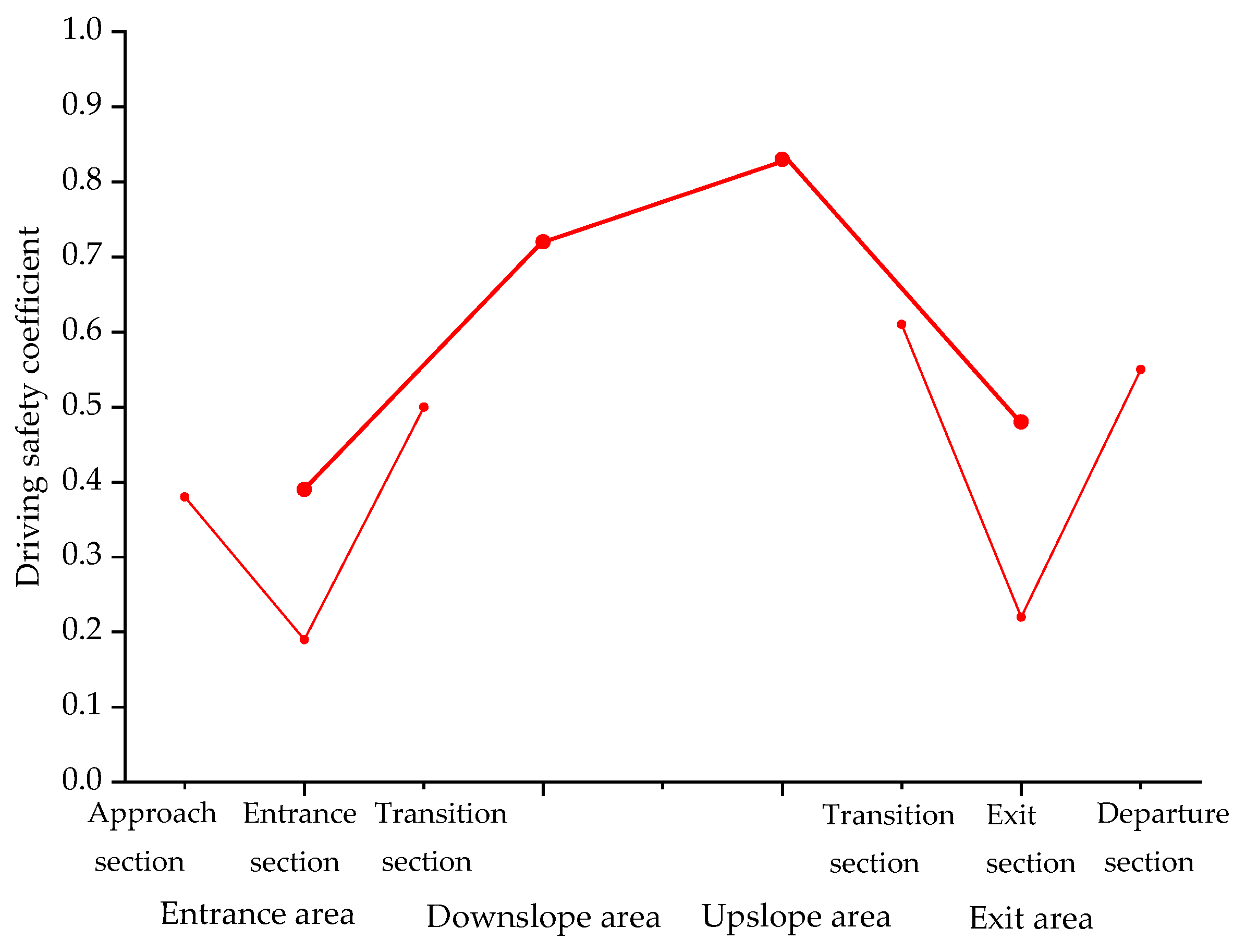
4.5. Driving Safety Evaluation of the Undersea Tunnel
5. Discussion
- Drivers of different genders, age groups, and levels of driving experience may have different perceptions of the undersea tunnel driving environment. Therefore, further research is needed on different driver types.
- The direction of the tunnel entrance will have an important relationship with the illumination changes at the entrance of the undersea tunnel. If the direction of the entrance of an undersea tunnel is different from that of the Jiaozhou Bay Tunnel, the situation or law may be different from the results of this study.
- The illuminance factor is only a part of the tunnel light environment. The size, shape, location, and arrangement of the lighting facilities in the undersea tunnel have different effects on the driver’s perception of the light environment. Therefore, it is necessary to further study the influence of tunnel light environment on drivers’ EEG signals and traffic safety.
6. Conclusions
- In the entrance and exit area of the undersea tunnel, the illumination, the change rate of EEG power and the vehicle speed have changed significantly, among which the illumination has been reduced by 700 times.
- Illuminance change index was positively correlated with the change rate of EEG power. The greater the illumination change index, the greater the change rate of EEG power and the more nervous the driver. Illumination change index was negatively correlated with vehicle speed. The greater the illuminance change, the lower the vehicle speed.
- The absolute value of the longitudinal slope was positively correlated with ΔPβ. The greater the absolute value of the longitudinal slope, the greater the ΔPβ. Under the same longitudinal slope, the drivers were more nervous when driving downslope than upslope. When the longitudinal slope is less than −2% or more than 1.5%, the vehicle speed will decrease with the increase of the longitudinal slope. When the longitudinal slope is between −2% and 1.5%, the vehicle speed is stable at about 71 km/h.
- It is an approximately opposite and symmetrical process for the driver to enter the entrance area of the undersea tunnel and leave the exit area. The closer to the entrance and exit of the undersea tunnel, the greater the change of the driver’s EEG power, the more nervous the driver and the worse the driving safety.
- Throughout the undersea tunnel, the safety of the entrance area was the worst, and that of the upslope area was the best. In the entrance area of the undersea tunnel, the safety of the entrance section was the worst.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, C.; Zhou, S. The overall design of Qingdao Jiaozhou Bay subsea tunnel. Adv. Mater. Res. 2012, 1494, 2971–2976. [Google Scholar] [CrossRef]
- Jiao, F.; Du, Z.; Zheng, H.; Wang, S. Visual characteristics of drivers at different sections of an urban underpass tunnel entrance: An experimental study. Sustainability 2021, 13, 5224. [Google Scholar] [CrossRef]
- Qin, L.; Dong, L.; Xu, W.; Zhang, L. Influence of Vehicle Speed on the Characteristics of Driver’s Eye Movement at a Highway Tunnel Entrance during Day and Night Conditions: A Pilot Study. Int. J. Environ. Res. Public Health 2018, 15, 656. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Fan, S.; Wang, Z.; Li, W. Application of fuzzy control method in a tunnel lighting system. Math. Comput. Model. 2010, 54, 931–937. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhuo, X.; Guo, W.; Wang, X.; Zhao, Z. Lighting Environment Optimization of Highway Tunnel Entrance Based on Simulation Research. Int. J. Environ. Res. Public Health 2019, 16, 2195. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiao, F.; Du, Z.; Wang, S.; Ni, Y.; He, R. Drivers’ Saccade Characteristics in Curves of Extra-Long Urban Underwater Tunnels. Transport. Res. Rec. 2020, 2674, 102–111. [Google Scholar] [CrossRef]
- Lu, J.; Li, B.; Li, H.; Al-Barakani, A. Expansion of city scale, traffic modes, traffic congestion, and air pollution. Cities 2021, 108, 102974. [Google Scholar] [CrossRef]
- Hammami, F. The impact of optimizing delivery areas on urban traffic congestion. Res. Transp. Bus. Manag. 2020, 37, 100569. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, Y.; Shen, Q. Risk assessment and management via multi-source information fusion for undersea tunnel construction. Autom. Constr. 2020, 111, 103051. [Google Scholar] [CrossRef]
- Gao, J.; Wu, X.; Luo, X.; Guan, S. Scientometric Analysis of safety sign research: 1990–2019. Int. J. Environ. Res. Public Health 2021, 18, 273. [Google Scholar] [CrossRef] [PubMed]
- Jiao, F.; Du, Z.; Wang, S.; Zheng, H. Study on the vision and comfort of the entrance and exit of the long underwater tunnel in city. China J. Highw. Transp. 2020, 33, 147–156. [Google Scholar] [CrossRef]
- Du, Z.; Zheng, Z.; Zheng, M. Drivers’ visual comfort at highway tunnel portals: A quantitative analysis based on visual oscillation. Transp. Res. Part D Transp. Environ. 2014, 31, 37–47. [Google Scholar] [CrossRef]
- Pan, F.; Zhang, L.; Wang, J. Lane-changing risk analysis in undersea tunnels based on fuzzy inference. IEEE Access 2020, 8, 19512–19520. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, Y.; Pan, F. Modeling and verification of the length of the entrance and exit sections of an undersea tunnel. IEEE Access 2021, 9, 55754–55763. [Google Scholar] [CrossRef]
- Zhang, Z.; Hu, J.; Liu, H. Study on maximum longitudinal slope of underwater highway tunnel. Mod. Tunn. Technol. 2013, 50, 8–14. [Google Scholar] [CrossRef]
- Sun, H.; Wang, Q.; Zhang, P.; Zhong, Y. Spatialtemporal characteristics of tunnel traffic accidents in China from 2001 to present. Adv. Civ. Eng. 2019, 2019, 4536414. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Du, Z.; Jiao, F.; Zheng, H.; Ni, Y. Drivers’ visual load at different time periods in entrance and exit zones of extra-long tunnel. Traffic Inj. Prev. 2020, 21, 539–544. [Google Scholar] [CrossRef]
- Wang, J.; Pervez, A.; Wang, Z. Crash analysis of Chinese freeway tunnel groups using a five-zone analytic approach. Tunn. Undergr. Space Technol. 2018, 82, 358–365. [Google Scholar] [CrossRef]
- Shang, T.; Lu, H.; Wu, P.; Wei, Y. Eye-tracking evaluation of exit advance guide signs in highway tunnels in familiar and unfamiliar drivers. Int. J. Environ. Res. Public Health 2021, 18, 6820. [Google Scholar] [CrossRef]
- Reimer, B. Impact of cognitive task complexity on drivers’ visual tunneling. Transp. Res Rec. 2009, 2138, 13–19. [Google Scholar] [CrossRef]
- He, S.; Liang, B.; Pan, G. Influence of dynamic highway tunnel lighting environment on driving safety based on eye movement parameters of the driver. Tunn. Undergr. Space Technol. 2017, 67, 52–60. [Google Scholar] [CrossRef]
- Peng, J.; Wang, C.; Shao, Y. Visual search efficiency evaluation method for potential connected vehicles on sharp curves. IEEE Access 2018, 6, 41827–41838. [Google Scholar] [CrossRef]
- Feng, Z.; Yang, M.; Kumfer, W. Effect of longitudinal slope of urban underpass tunnels on drivers’ heart rate and speed: A study based on a real vehicle experiment. Tunn. Undergr. Space Technol. 2018, 81, 525–533. [Google Scholar] [CrossRef]
- Mo, Q.; Li, R.; Li, J. Research on the influence of mountain highway alignment on driver characteristics based on ECG index. China Saf. Sci. J. 2013, 23, 16–20. [Google Scholar] [CrossRef]
- Zhang, J.; Li, S.; Li, L.; Zhang, Q.; Xu, Z.; Wu, J. Grouting effects evaluation of water-rich faults and its engineering application in Qingdao Jiaozhou Bay Subsea Tunnel, China. Geomech. Eng. 2017, 12, 35–52. [Google Scholar] [CrossRef]
- Ministry of Transport of China. Design Specification of Highway Tunnel Lighting (JTGT D70/2-01-2014); China Communications Press, Ministry of Transport of China: Beijing, China, 2014.
- Christelle, C.; Sandrine, C. Analysis of critical incidents in tunnels to improve learning from experience. Saf. Sci. 2019, 116, 222–230. [Google Scholar] [CrossRef]
- Zheng, Z.; Du, Z.; Yan, Q. The impact of rhythm-based visual reference system in long highway tunnels. Saf. Sci. 2017, 95, 75–82. [Google Scholar] [CrossRef]
- Yang, L.; Guan, W.; Ma, R.; Li, X. Comparison among driving state prediction models for car-following condition based on EEG and driving features. Accid. Anal. Prev. 2019, 133, 105296. [Google Scholar] [CrossRef]
- Yeung, J.; Wong, Y. Road traffic accidents in Singapore expressway tunnels. Tunn. Undergr. Space Technol. 2013, 38, 534–541. [Google Scholar] [CrossRef]
- Zhao, X.; Ju, Y.; Li, J. Evaluation of the effect of protruding road signs in long tunnels based on driving behavior and visual characteristics. China China J. Highw. Transp. 2020, 33, 29–41. [Google Scholar] [CrossRef]
- Du, Z.; Wang, S.; Yang, L.; Ni, Y.; Jiao, F. Experimental study on the efficacy of retroreflective rings in the curved freeways tunnels. Tunn. Undergr. Space Technol. 2021, 110, 103813. [Google Scholar] [CrossRef]
- Lee, T.; Chalmers, T.; Burton, D.; Zilberg, E. Electrophysiological brain-cardiac coupling in train drivers during monotonous driving. Int. J. Environ. Res. Public Health 2021, 18, 3741. [Google Scholar] [CrossRef]
- Li, Z.; Zhong, W.; Li, C.; Li, L.; Zhang, H. EEG signal analysis for the assessment and quantification of driver’s fatigue. Transp. Res. Part F Traffic Psychol. Behav. 2010, 13, 297–306. [Google Scholar] [CrossRef]
- Mousa, K.; Murugappan, M.; Badlishah, A. Wavelet packet transform based driver distraction level classification using EEG. Math. Probl. Eng. 2013, 2013, 297587. [Google Scholar] [CrossRef]
- Li, S.; Guo, M.; Wang, L.; Chai, M. Analysis on the correlation degree between the driver’s reaction ability and physiological parameters. Math. Probl. Eng. 2017, 2017, 5215874. [Google Scholar] [CrossRef]
- Ye, F.; He, C.; Wang, S.; Zhang, J. Landscape design of mountain highway tunnel portals in China. Tunn. Undergr. Space Technol. 2012, 29, 52–68. [Google Scholar] [CrossRef]
- Pervez, A.; Huang, H.; Lee, J. Crash analysis of expressway long tunnels using a seven-zone analytic approach. J. Transp. Saf. Secur. 2021, 13, 108–122. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable 1 | Variable 2 | Entrance Area | Downslope Area | Upslope Area | Export Area | ||||
|---|---|---|---|---|---|---|---|---|---|
| Correlation | Degree of Relevance | Correlation | Degree of Relevance | Correlation | Degree of Relevance | Correlation | Degree of Relevance | ||
| ΔE | ΔPβ | 0.91 | High | — | — | — | — | 0.84 | High |
| ΔP(θ+α)/β | 0.74 | Medium | — | — | — | — | 0.69 | Medium | |
| Vehicle speed | 0.77 | Medium | — | — | — | — | 0.62 | Medium | |
| Acceleration | 0.33 | Low | — | — | — | — | 0.41 | Low | |
| Longitudinal slope | ΔPβ | 0.86 | High | 0.81 | High | 0.54 | Medium | 0.83 | High |
| ΔP(θ+α)/β | 0.65 | Medium | 0.71 | Medium | 0.49 | Low | 0.52 | Medium | |
| Vehicle speed | 0.63 | Medium | 0.51 | Medium | 0.57 | Medium | 0.66 | Medium | |
| Acceleration | 0.54 | Medium | — | — | 0.36 | Low | 0.46 | Low | |
| Position | Entrance Area | Downslope Area | Upslope Area | Exit Area | ||||
|---|---|---|---|---|---|---|---|---|
| Approach Section | Entrance Section | Transition Section | Transition Section | Exit Section | Departure Section | |||
| Driving safety coefficient | 0.39 | 0.72 | 0.83 | 0.48 | ||||
| 0.38 | 0.20 | 0.50 | 0.61 | 0.23 | 0.55 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Du, Z.; Jiao, F.; Pan, F. Analysis of EEG Characteristics of Drivers and Driving Safety in Undersea Tunnel. Int. J. Environ. Res. Public Health 2021, 18, 9810. https://doi.org/10.3390/ijerph18189810
Yang Y, Du Z, Jiao F, Pan F. Analysis of EEG Characteristics of Drivers and Driving Safety in Undersea Tunnel. International Journal of Environmental Research and Public Health. 2021; 18(18):9810. https://doi.org/10.3390/ijerph18189810
Chicago/Turabian StyleYang, Yongzheng, Zhigang Du, Fangtong Jiao, and Fuquan Pan. 2021. "Analysis of EEG Characteristics of Drivers and Driving Safety in Undersea Tunnel" International Journal of Environmental Research and Public Health 18, no. 18: 9810. https://doi.org/10.3390/ijerph18189810
APA StyleYang, Y., Du, Z., Jiao, F., & Pan, F. (2021). Analysis of EEG Characteristics of Drivers and Driving Safety in Undersea Tunnel. International Journal of Environmental Research and Public Health, 18(18), 9810. https://doi.org/10.3390/ijerph18189810