Using Vehicle-to-Vehicle Communication to Improve Traffic Safety in Sand-dust Environment

Abstract
1. Introduction
2. Methodology
2.1. Model
2.2. Linear Stability Analysis
2.3. Numerical Simulations
2.3.1. Simulating the Effects of a Small Perturbation
2.3.2. Simulating the Effects of a Suddenly Stopped Vehicle
3. Results
3.1. Stability Criterion
3.2. Simulation Results
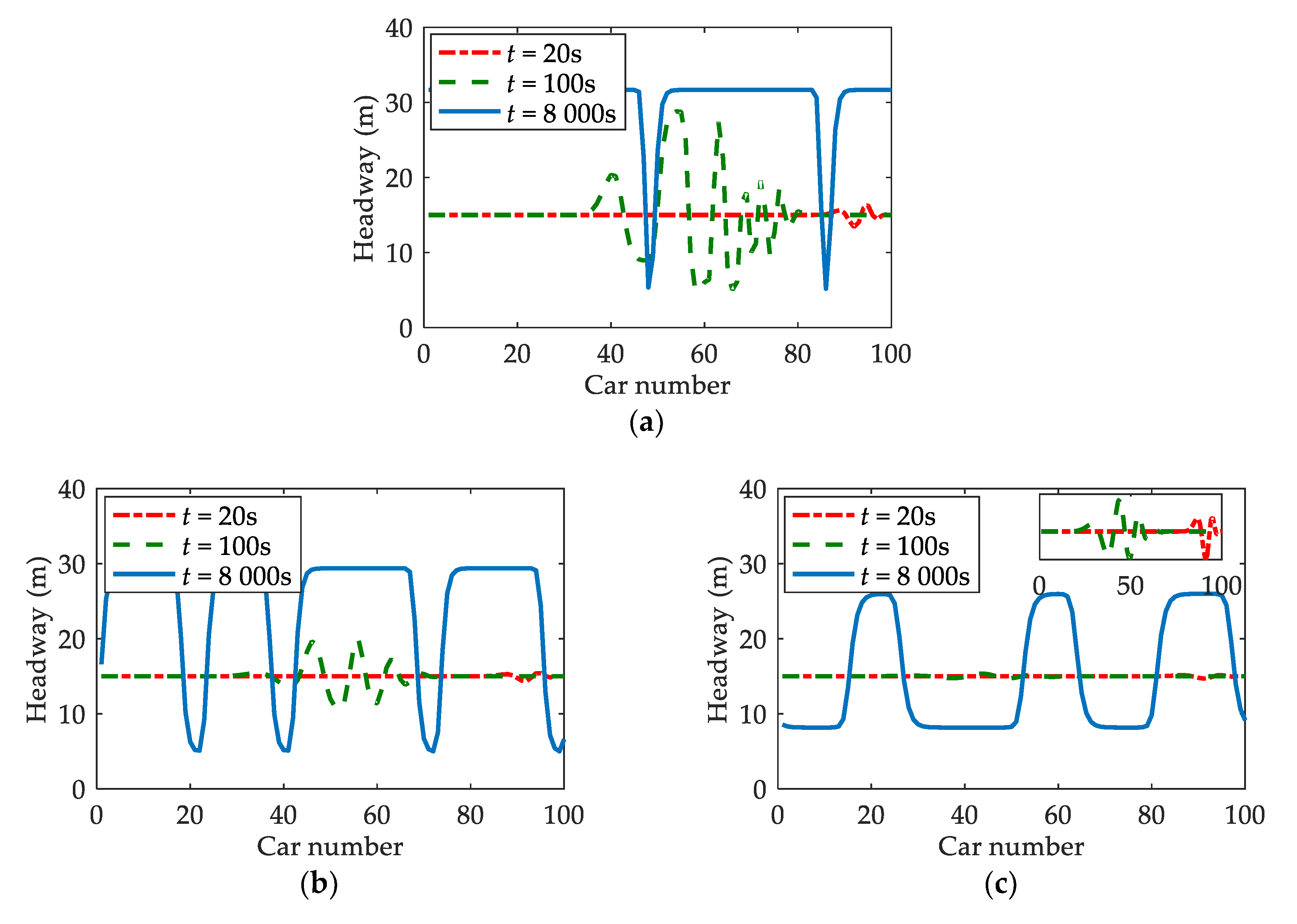
3.2.1. Effects of V2V Communication on Traffic Flow When a Small Perturbation Is Inserted
3.2.2. Effects of V2V Communication on Traffic Flow When a Vehicle Stops Suddenly
4. Discussion
5. Conclusions
- (1)
- When a small perturbation is imposed on the traffic flow, drivers influenced by sand-dust environment will brake or accelerate violently due to their impaired perception. As a result, the stability as well as the safety of traffic system decrease. However, with information from V2V communication, drivers perceive traffic conditions earlier and adjust their driving behaviors more quickly. The fluctuations of acceleration, headway, and velocity are diminished thanks to the pre-reaction, which helps to improve traffic safety.
- (2)
- When a vehicle in the traffic flow stops suddenly in sand-dust environment, the number of crumped vehicles decreases with the assistance of V2V communication. Meanwhile, the residual velocities of the crumped vehicles decrease when the collisions occur. The results indicate that V2V communication is able to reduce the possibility and severity of rear-end collisions in sand-dust environment. As for vehicles far away from the stopped vehicle, the moment drivers start to decelerate becomes earlier as they are provided with information by V2V communication, which is conducive to traffic safety.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 18 November 2019).
- Alghnam, S.; Towhari, J.; Alkelya, M.; Alsaif, A.; Alrowaily, M.; Alrabeeah, F.; Albabtain, I. The association between mobile phone use and severe traffic injuries: A case-control study from Saudi Arabia. Int. J. Environ. Res. Public Health 2019, 16, 2706. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.R.; Cai, C.S.; Wolshon, B. From normal operation to evacuation: Single-vehicle safety under adverse weather, topographic, and operational conditions. Nat. Hazards Rev. 2009, 10, 68–76. [Google Scholar] [CrossRef]
- Chen, F.; Chen, S.R. Injury severities of truck drivers in single- and multi-vehicle accidents on rural highways. Accid. Anal. Prev. 2011, 43, 1677–1688. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Tan, J.H. Traffic accident and emission reduction through intermittent release measures for heavy fog weather. Mod. Phys. Lett. B 2015, 29, 1550148. [Google Scholar] [CrossRef]
- Saha, P.; Mashhadi, M.M.R.; Ksaibati, K. Impact of traffic citations to reduce truck crashes on challenging roadway geometry. Int. J. Inj. Control Saf. Promot. 2019, 26, 60–71. [Google Scholar] [CrossRef]
- Ning, G.C.; Kang, C.Y.; Chen, D.H.; Sun, G.L.; Liu, J.; Wang, S.G.; Shang, K.Z.; Ma, M.J. Analysis of characteristics of traffic accidents under adverse weather conditions in China during 2005–2014. J. Arid Meteorol. 2016, 34, 753–762. (In Chinese) [Google Scholar]
- Wang, B.G.; Wang, X.Q.; Liu, S.Y.; Huo, R. Safety Ergonomics, 2nd ed.; China Machine Press: Beijing, China, 2016; pp. 277–279. (In Chinese) [Google Scholar]
- Wang, B.G.; Wang, X.Q.; Liu, S.Y.; Huo, R. Safety Ergonomics, 2nd ed.; China Machine Press: Beijing, China, 2016; pp. 3–4. (In Chinese) [Google Scholar]
- Tan, J.H. Numerical simulation of car-following model in sand-dust environment. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 63–67. (In Chinese) [Google Scholar]
- Zhang, Z.C.; Dong, Z.B.; Li, J.Y.; Qian, G.Q.; Jiang, C.W. Implications of surface properties for dust emission from gravel deserts (gobis) in the Hexi Corridor. Geoderma 2016, 268, 69–77. [Google Scholar] [CrossRef]
- Li, X.R.; Xiao, H.L.; He, M.Z.; Zhang, J.G. Sand barriers of straw checkerboards for habitat restoration in extremely arid desert regions. Ecol. Eng. 2006, 28, 149–157. [Google Scholar] [CrossRef]
- Biswas, S.; Tatchikou, R.; Dion, F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Commun. Mag. 2006, 44, 74–82. [Google Scholar] [CrossRef]
- Malecki, K. A computer simulation of traffic flow with on-street parking and drivers’ behaviour based on cellular automata and a multi-agent system. J. Comput. Sci. 2018, 28, 32–42. [Google Scholar] [CrossRef]
- Zhu, M.X.; Wang, X.S.; Tarko, A.; Fang, S.E. Modeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study. Transp. Res. Part C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef]
- Newell, G.F. Nonlinear effects in the dynamics of car following. Oper. Res. 1961, 9, 209–229. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef] [PubMed]
- Jiang, R.; Wu, Q.S.; Zhu, Z.J. Full velocity difference model for a car-following theory. Phys. Rev. E 2001, 64, 017101. [Google Scholar] [CrossRef] [PubMed]
- Sugiyama, N.; Nagatani, T. Multiple-vehicle collision induced by a sudden stop in traffic flow. Phys. Lett. A 2012, 376, 1803–1806. [Google Scholar] [CrossRef]
- Tan, J.H. Impact of risk illusions on traffic flow in fog weather. Physica A 2019, 525, 216–222. [Google Scholar] [CrossRef]
- Hua, X.D.; Wang, W.; Wang, H. A car-following model with the consideration of vehicle-to-vehicle communication technology. Acta Phys. Sin. 2016, 65, 010502. (In Chinese) [Google Scholar]
- Helbing, D.; Tilch, B. Generalized force model of traffic dynamics. Phys. Rev. E 1998, 58, 133–138. [Google Scholar] [CrossRef]
- Li, X.C.; Luo, X.; He, M.C.; Chen, S.W. An improved car-following model considering the influence of space gap to the response. Physica A 2018, 509, 536–545. [Google Scholar] [CrossRef]
- Tan, J.H.; Gong, L.; Qin, X.Q. Effect of imitation phenomenon on two-lane traffic safety in fog weather. Int. J. Environ. Res. Public Health 2019, 16, 3709. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.H.; Gong, L.; Qin, X.Q. Global optimality under Internet of Vehicles: Strategy to improve traffic safety and reduce energy dissipation. Sustainability 2019, 11, 4541. [Google Scholar] [CrossRef]
- Li, Z.P.; Chen, L.Z. Effects of intelligent control mechanism on multiple-vehicle collision under emergency. Physica A 2014, 404, 16–25. [Google Scholar] [CrossRef]
- Kikuchi, S.; Uno, N.; Tanaka, M. Impacts of shorter perception-reaction time of adapted cruise controlled vehicles on traffic flow and safety. J. Transp. Eng. 2003, 129, 146–154. [Google Scholar] [CrossRef]
- Nagatani, T. Chain-reaction crash on a highway in high visibility. Physica A 2016, 450, 466–472. [Google Scholar] [CrossRef]
- Nagatani, T. Chain-reaction crash in traffic flow controlled by taillights. Physica A 2015, 419, 1–6. [Google Scholar] [CrossRef]
- Hjelkrem, O.A.; Ryeng, E.O. Chosen risk level during car-following in adverse weather conditions. Accid. Anal. Prev. 2016, 95, 227–235. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Wang, T.; Gao, Z.Y.; Zhao, X.M. Multiple velocity difference model and its stability analysis. Acta Phys. Sin. 2006, 55, 634–640. (In Chinese) [Google Scholar]
- Sugiyama, N.; Nagatani, T. Multiple-vehicle collision in traffic flow by a sudden slow down. Physica A 2013, 392, 1848–1857. [Google Scholar] [CrossRef]
- Nagatani, T.; Yonekura, S. Multiple-vehicle collision induced by lane changing in traffic flow. Physica A 2014, 404, 171–179. [Google Scholar] [CrossRef]
- Ou, H.; Tang, T.Q.; Zhang, J.; Zhou, J.M. A macro traffic flow model with probability distribution function. Phys. Lett. A 2018, 382, 2819–2824. [Google Scholar] [CrossRef]
- Yu, G.Z.; Wang, P.C.; Wu., X.K.; Wang, Y.P. Linear and nonlinear stability analysis of a car-following model considering velocity difference of two adjacent lanes. Nonlinear Dyn. 2016, 84, 387–397. [Google Scholar] [CrossRef]
- Hartmann, T.; Vossebeld, N. A semiotic framework to understand how signs in construction process simulations convey information. Adv. Eng. Inform. 2013, 27, 378–385. [Google Scholar] [CrossRef]
- Shintel, H.; Nusbaum, H.C. The sound of motion in spoken language: Visual information conveyed by acoustic properties of speech. Cognition 2007, 105, 681–690. [Google Scholar] [CrossRef]
- Wang, B.G.; Wang, X.Q.; Liu, S.Y.; Huo, R. Safety Ergonomics, 2nd ed.; China Machine Press: Beijing, China, 2016; pp. 130–132. (In Chinese) [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crumpled Vehicles | Reduction Percentage of Residual Velocity (%) | |||
|---|---|---|---|---|
| β = 0 | β = 0.4 | |||
| (160, 1.6) | First vehicle | 2.421 | 2.223 | 8.178 |
| (160, 2.0) | First vehicle | 0.797 | 0.558 | 29.987 |
| (180, 2.5) | First vehicle | 1.083 | 0.930 | 14.127 |
| (180, 1.4) | First vehicle | 4.373 | 4.241 | 3.019 |
| Second vehicle | 0.273 | 0.157 | 42.491 | |
| (200, 1.8) | First vehicle | 4.481 | 4.390 | 2.031 |
| Second vehicle | 0.439 | 0.293 | 33.257 | |
| (200, 1.2) | First vehicle | 5.779 | 5.688 | 1.575 |
| Second vehicle | 3.250 | 3.151 | 3.046 | |
| Third vehicle | 0.561 | 0.502 | 10.517 | |
| (230, 1.4) | First vehicle | 6.504 | 6.461 | 0.661 |
| Second vehicle | 4.677 | 4.629 | 1.026 | |
| Third vehicle | 2.821 | 2.797 | 0.851 | |
| Forth vehicle | 0.845 | 0.836 | 1.065 | |
| The Moment Starting to Decelerate (s) | Drivers’ Pre-Reaction Time (s) | ||||
|---|---|---|---|---|---|
| 2 | 138.7 | 125.9 | 117.1 | 12.8 | 21.6 |
| 3 | 137.2 | 124.5 | 115.8 | 12.7 | 21.4 |
| 4 | 135.7 | 123.1 | 114.4 | 12.6 | 21.3 |
| 5 | 134.2 | 121.7 | 113.1 | 12.5 | 21.1 |
| 6 | 132.7 | 120.3 | 111.9 | 12.4 | 20.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, J.; Qin, X.; Gong, L. Using Vehicle-to-Vehicle Communication to Improve Traffic Safety in Sand-dust Environment. Int. J. Environ. Res. Public Health 2020, 17, 1165. https://doi.org/10.3390/ijerph17041165
Tan J, Qin X, Gong L. Using Vehicle-to-Vehicle Communication to Improve Traffic Safety in Sand-dust Environment. International Journal of Environmental Research and Public Health. 2020; 17(4):1165. https://doi.org/10.3390/ijerph17041165
Chicago/Turabian StyleTan, Jinhua, Xuqian Qin, and Li Gong. 2020. "Using Vehicle-to-Vehicle Communication to Improve Traffic Safety in Sand-dust Environment" International Journal of Environmental Research and Public Health 17, no. 4: 1165. https://doi.org/10.3390/ijerph17041165
APA StyleTan, J., Qin, X., & Gong, L. (2020). Using Vehicle-to-Vehicle Communication to Improve Traffic Safety in Sand-dust Environment. International Journal of Environmental Research and Public Health, 17(4), 1165. https://doi.org/10.3390/ijerph17041165