
Improving Aeroelastic Stability of Bladed Disks with Topologically Optimized Piezoelectric Materials and Intentionally Mistuned Shunt Capacitance



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
3. Topology Optimization for the Piezoelectric Materials
3.1. Theoretical Basis
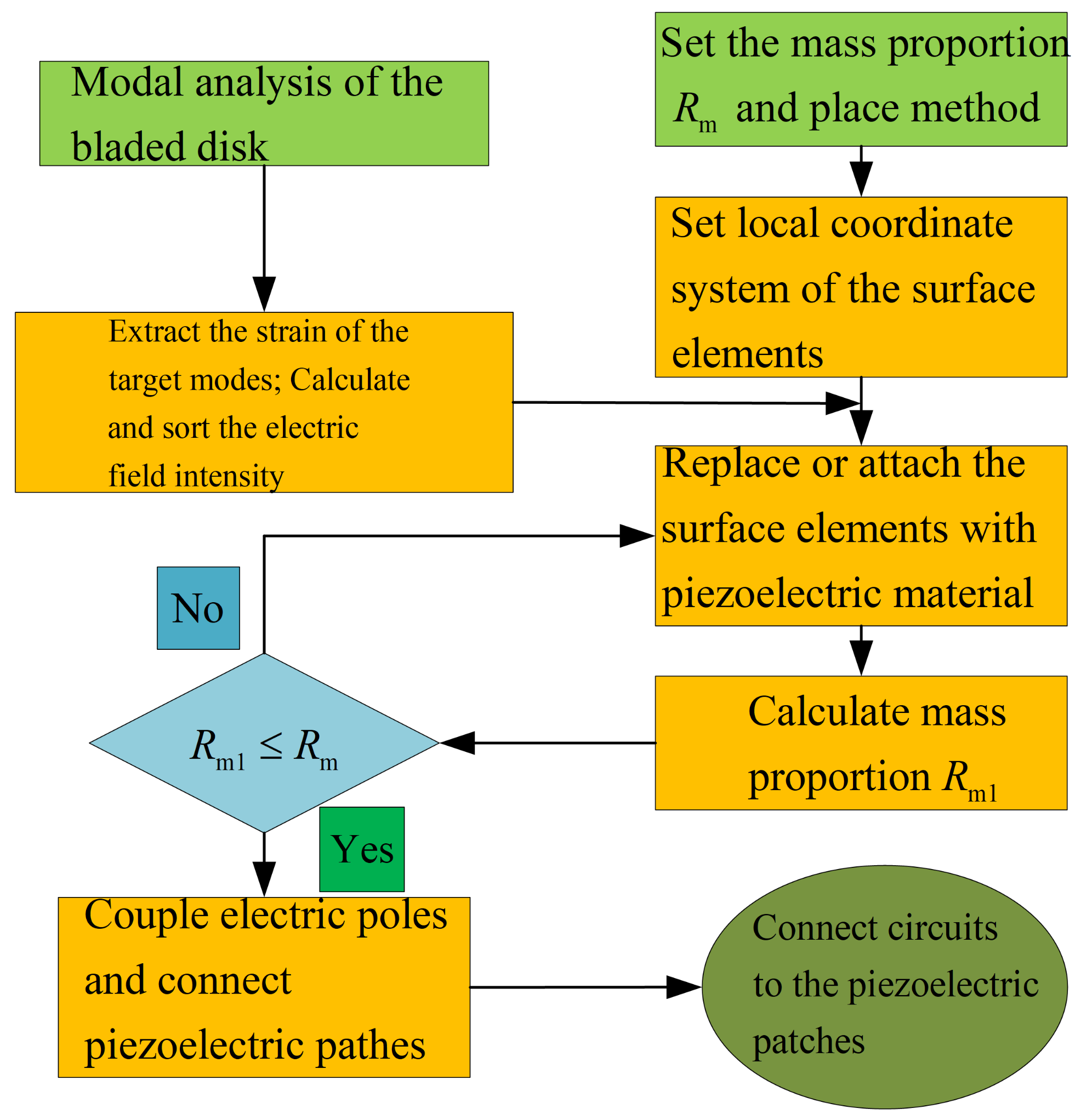
3.2. The Optimization Procedure
- 1.
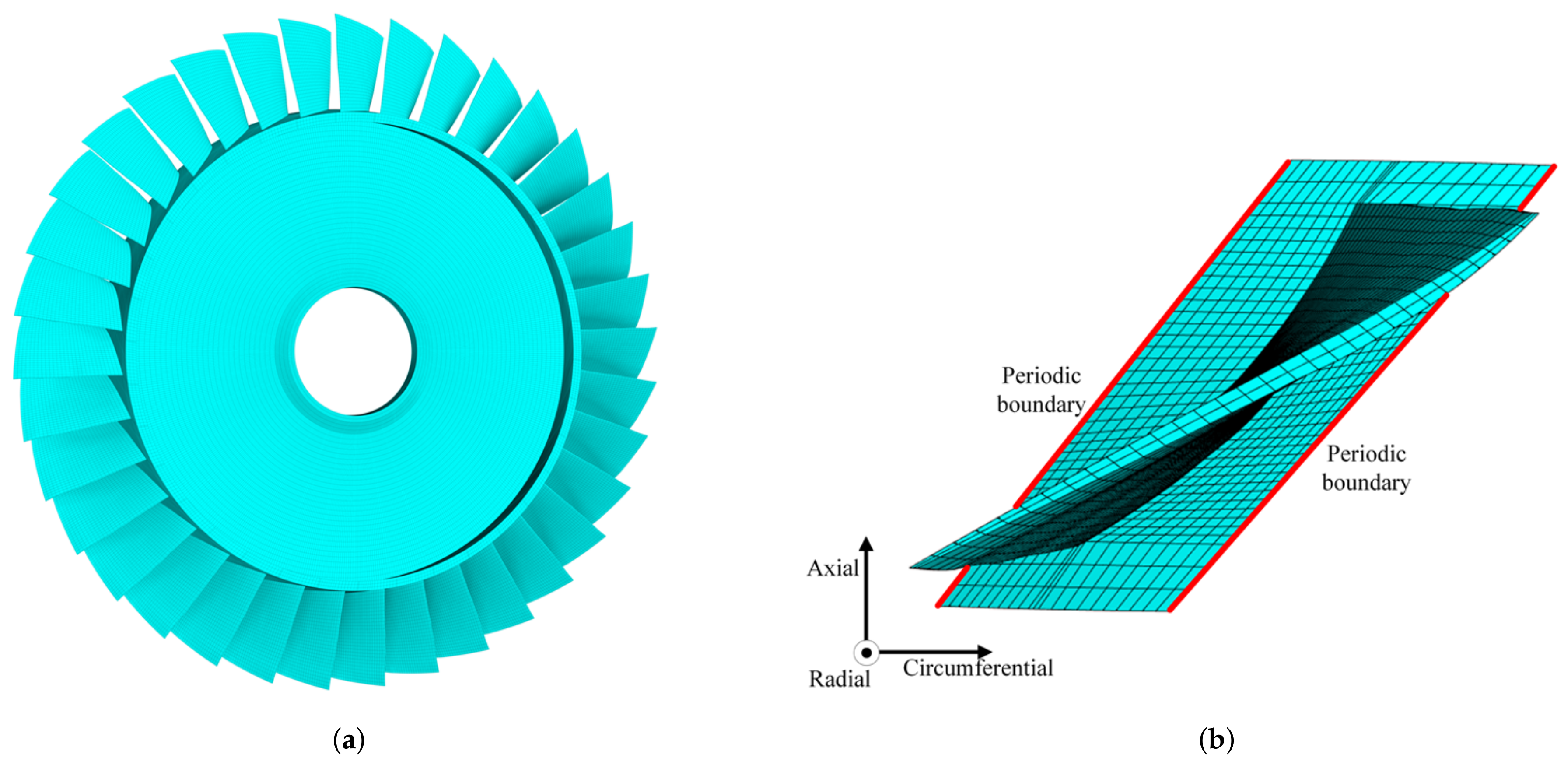
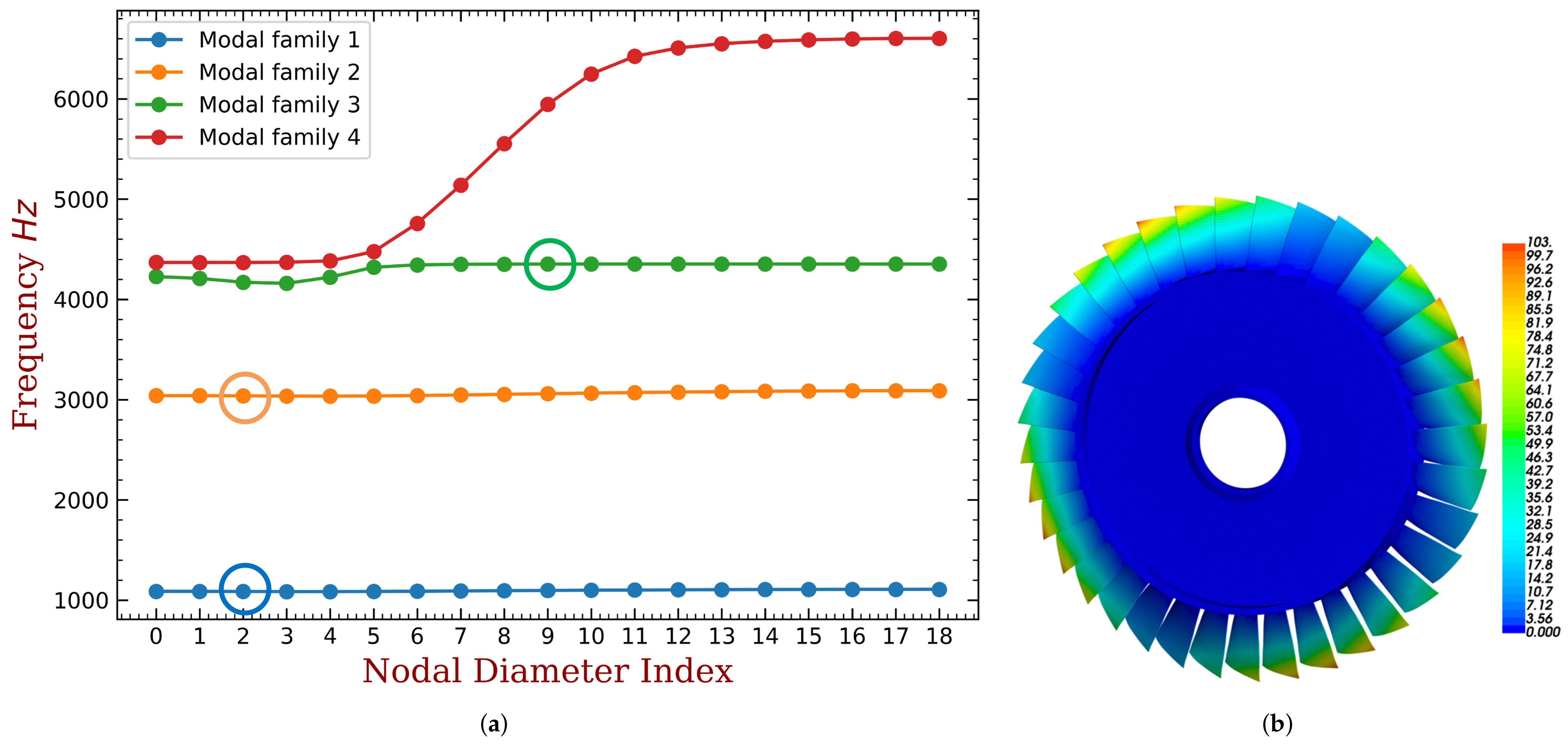
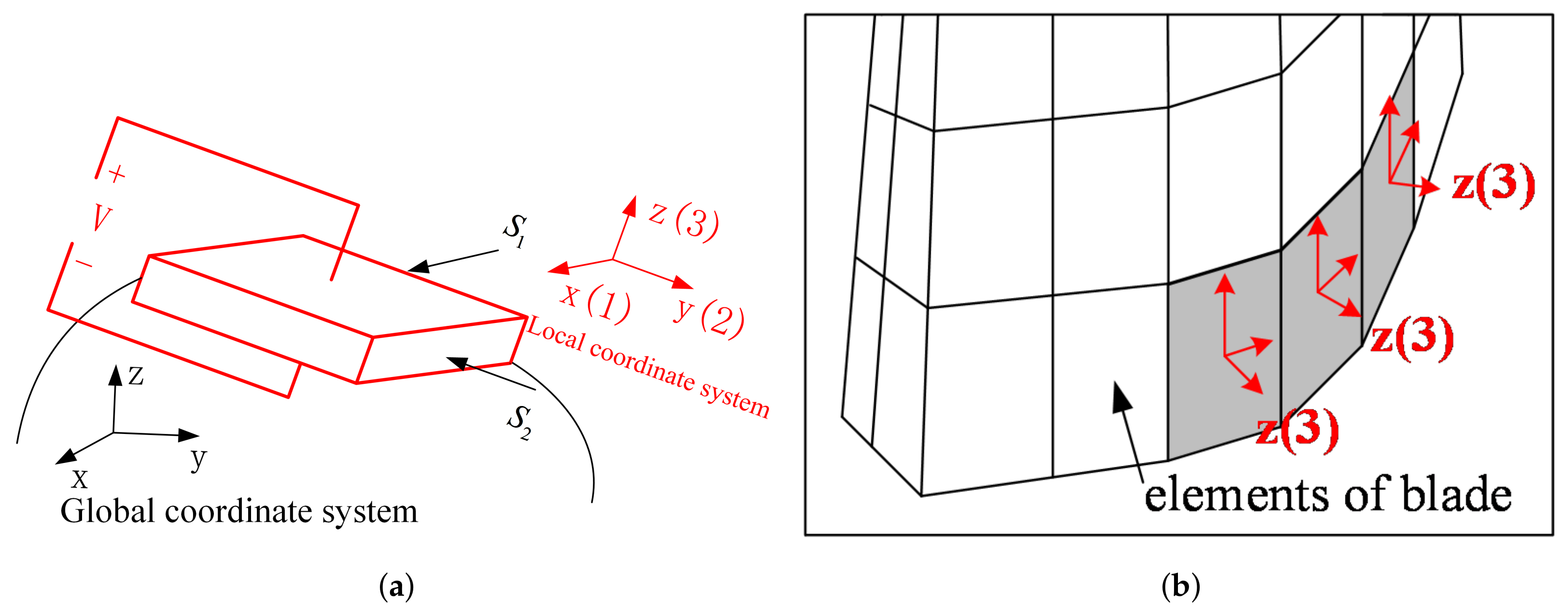
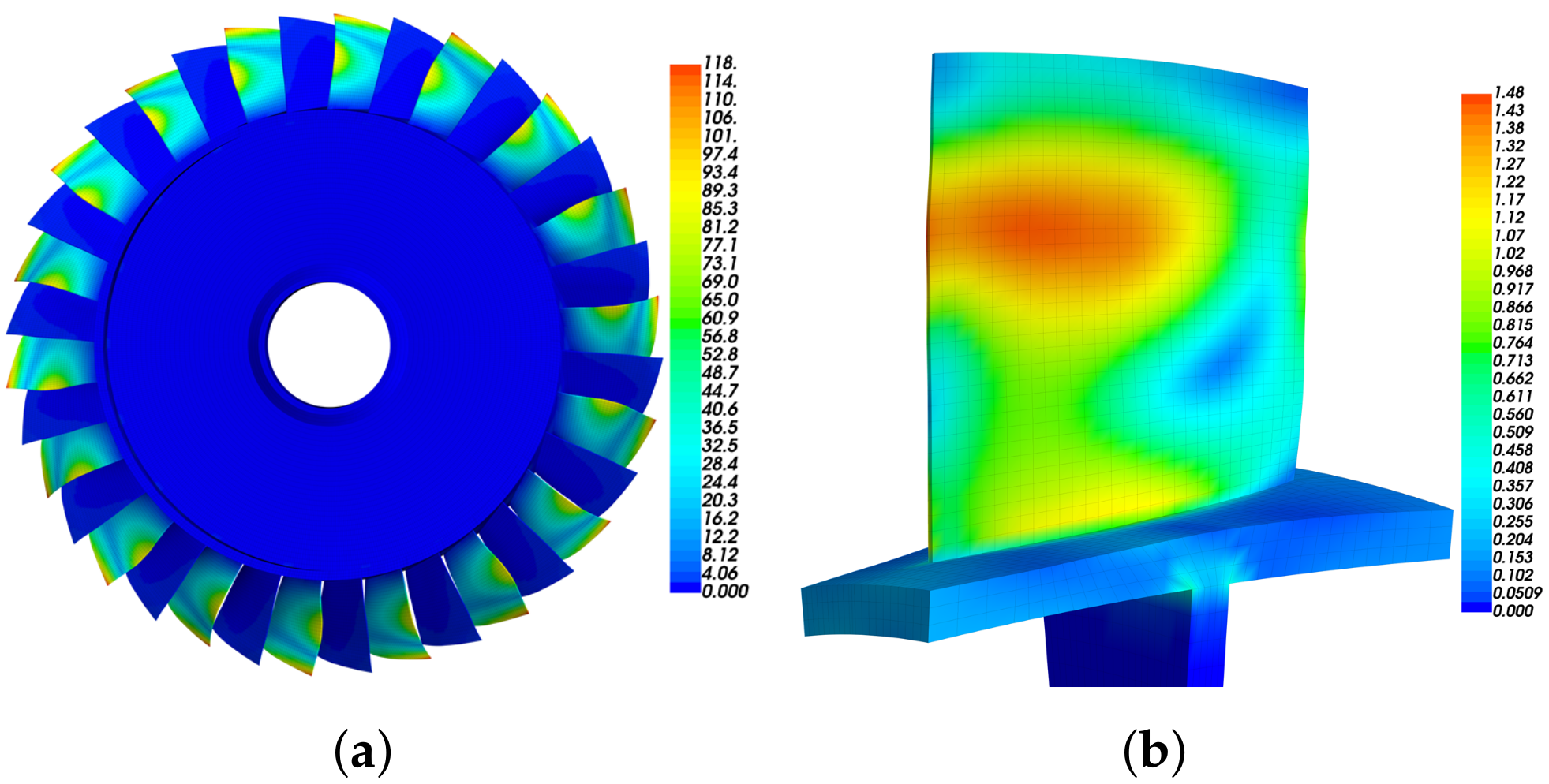
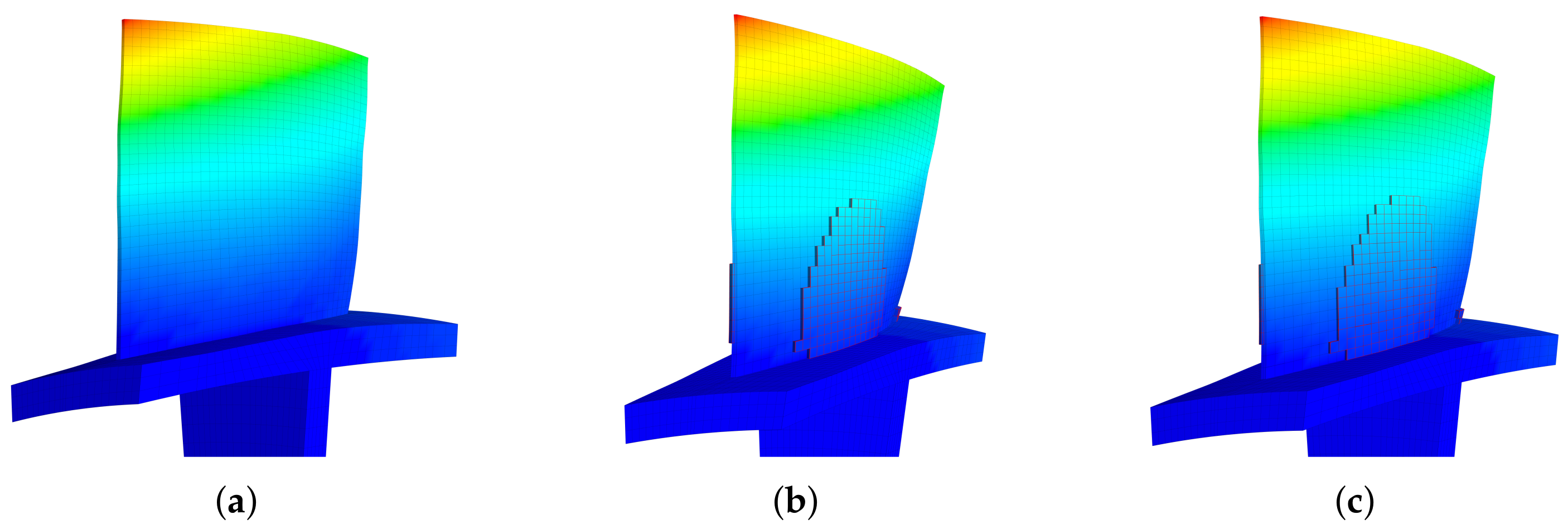
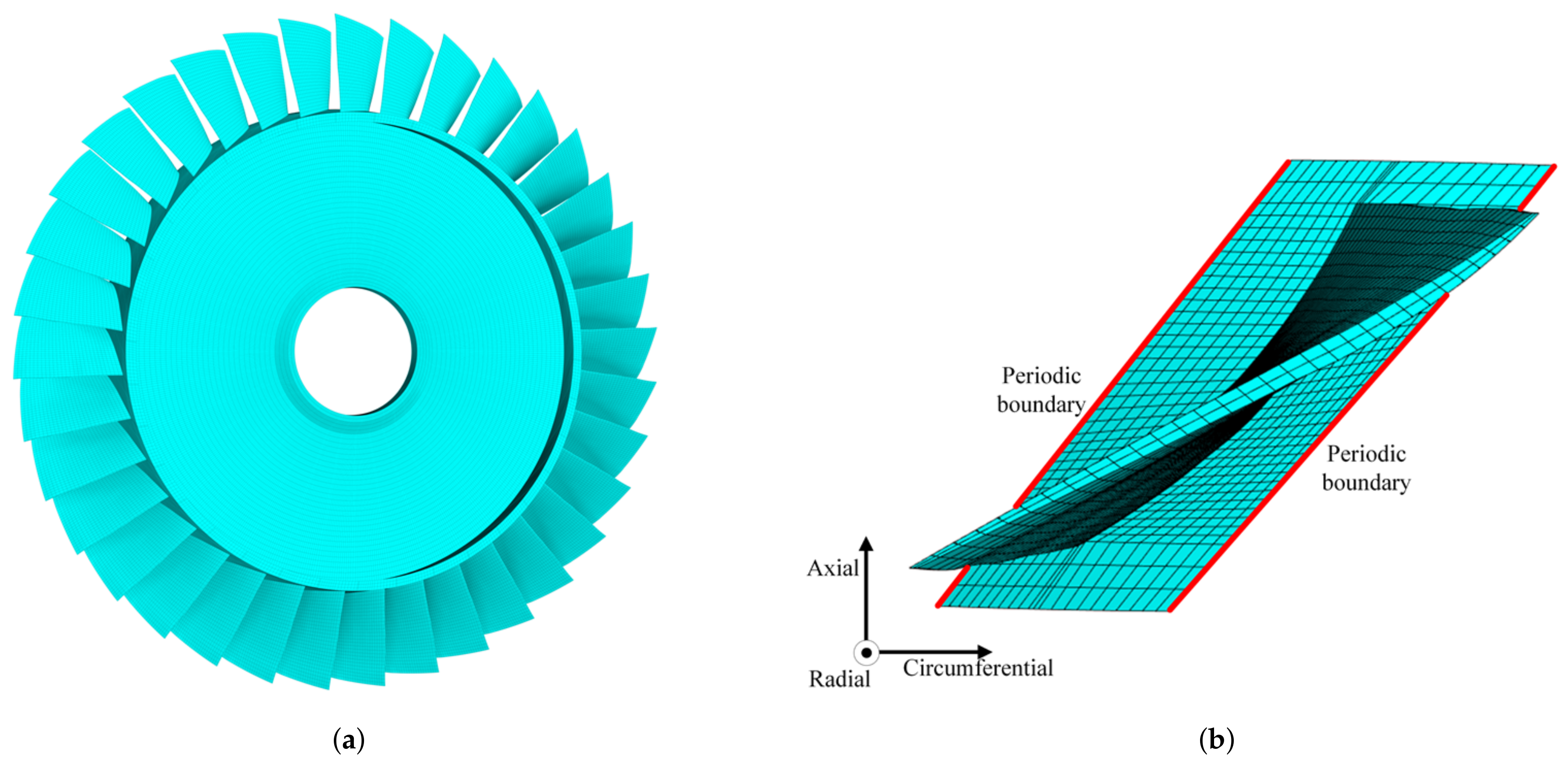
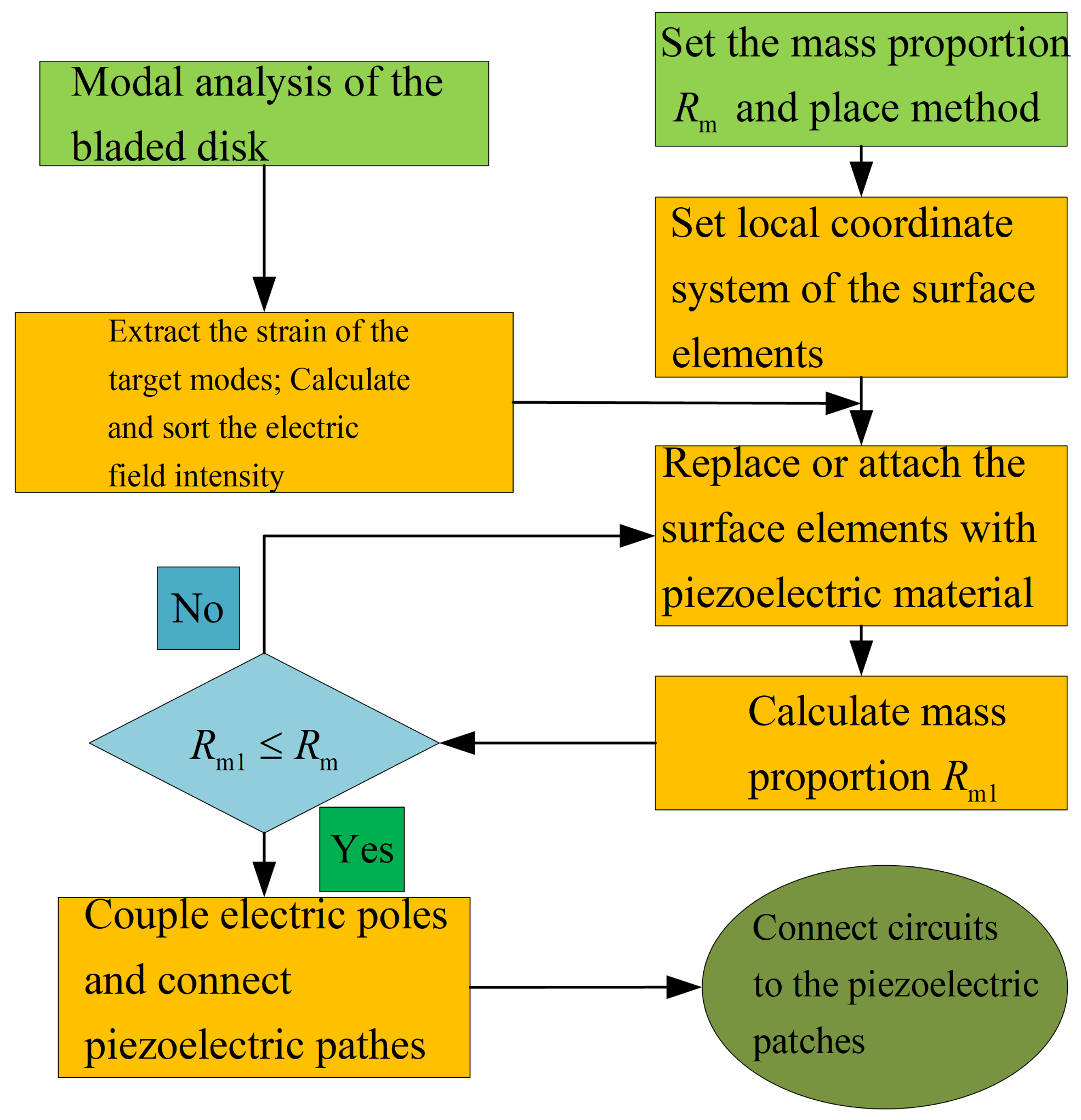
- Conduct modal analysis of the tuned bladed disk and obtain its modal information. This can be done with the sector model plus periodic conditions as shown in Figure 1b. Our target modes are those dominated by the blade 1st bending deformation (1st modal family).
- 2.
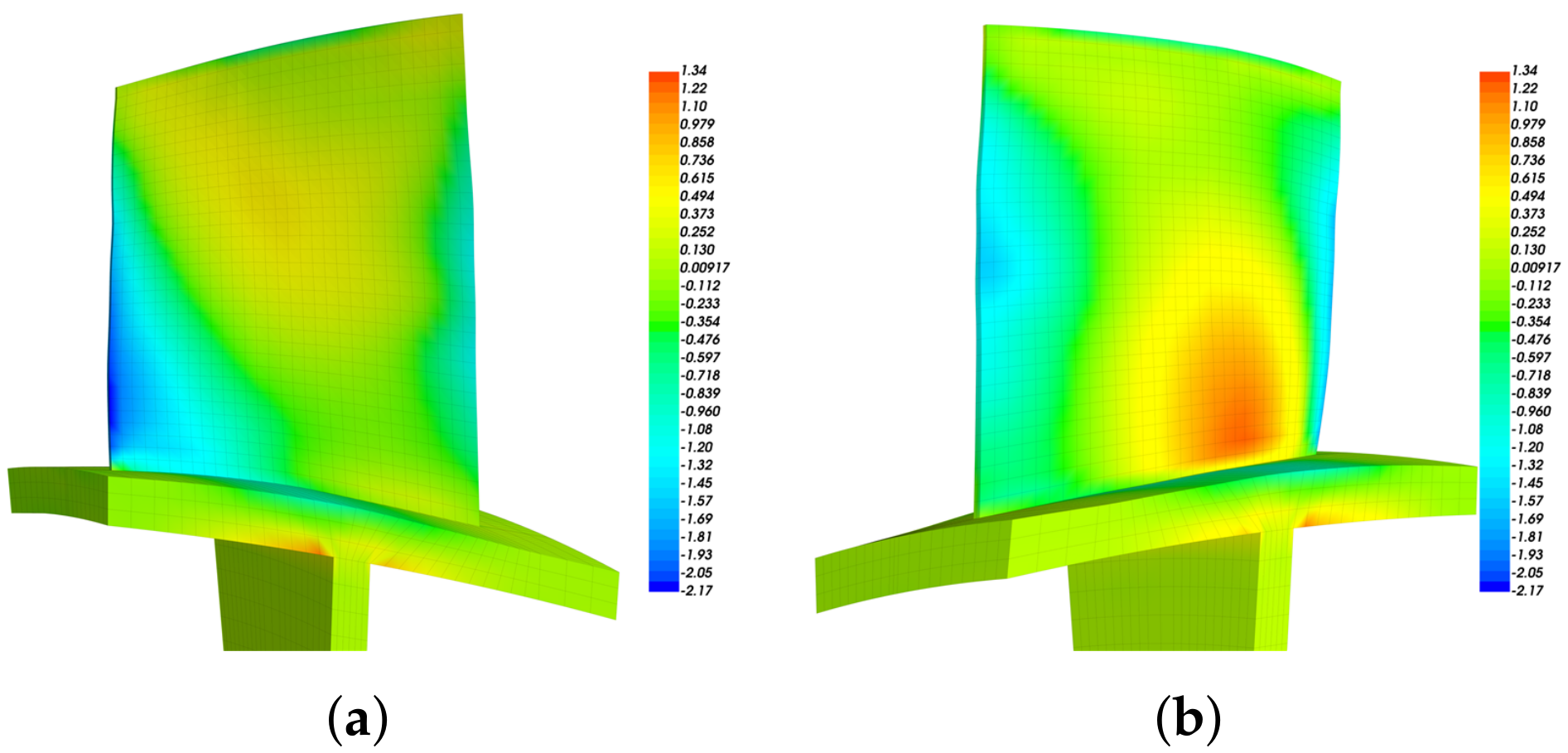
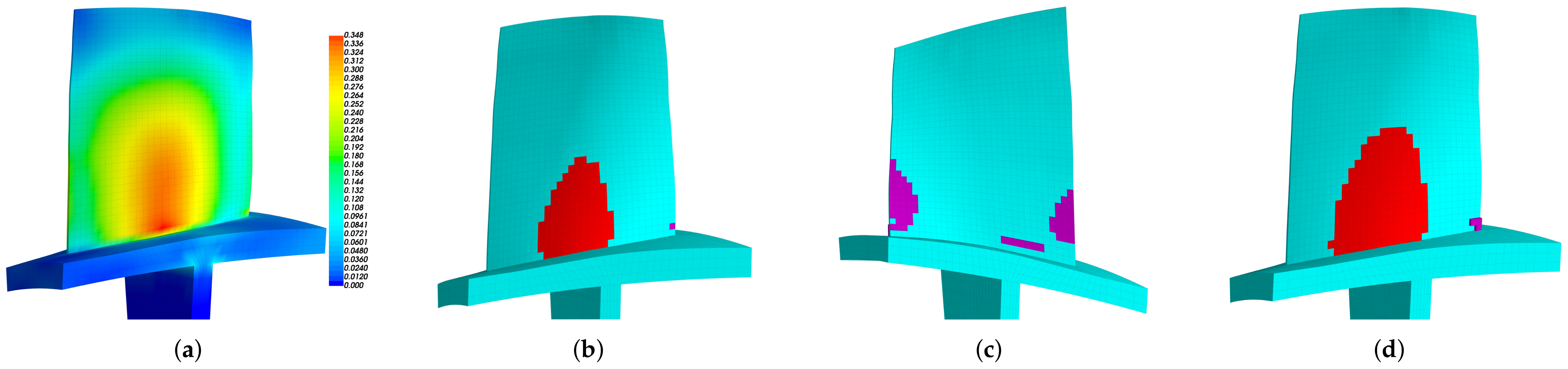
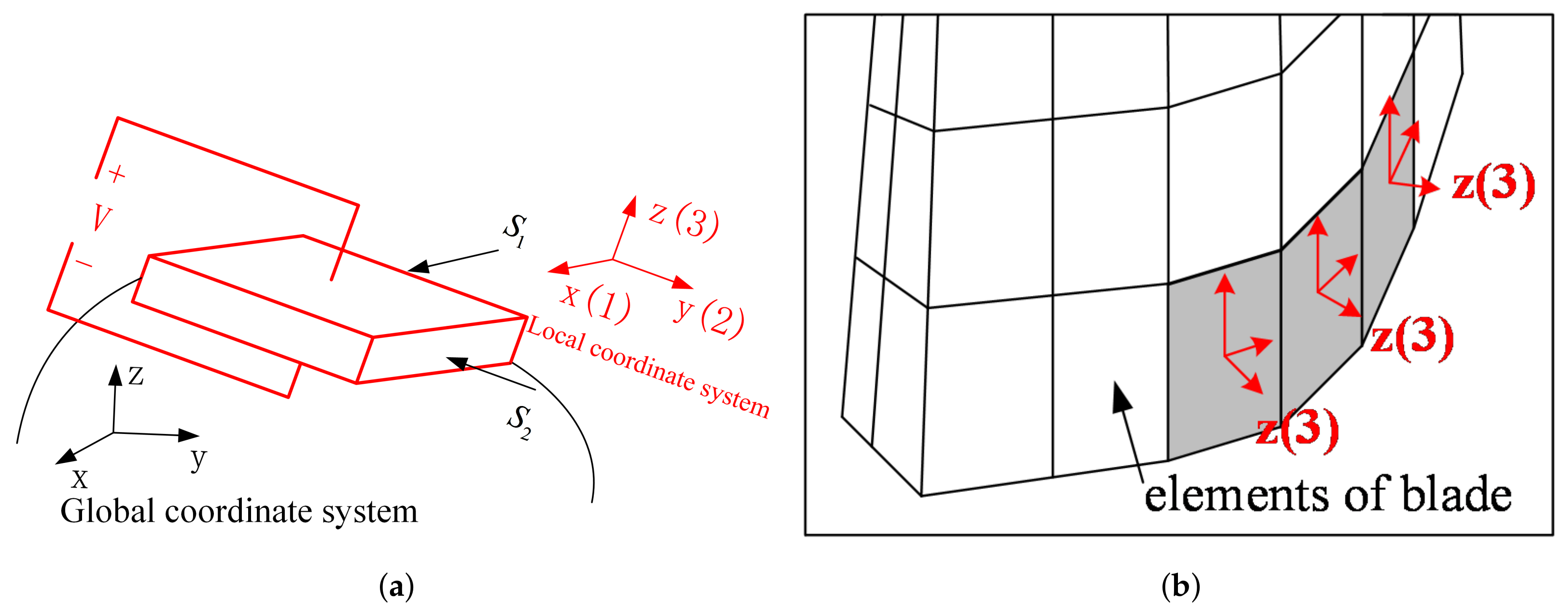
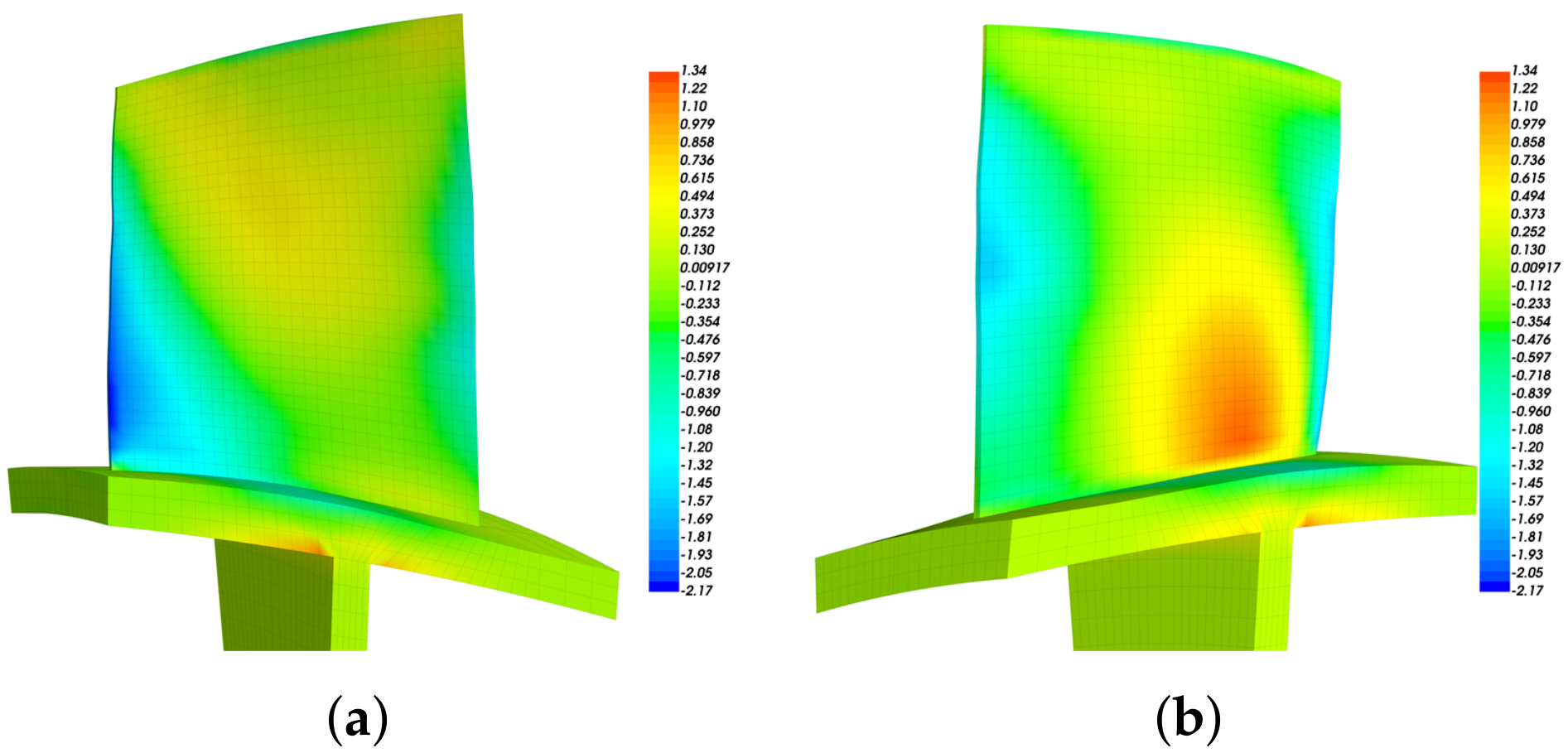
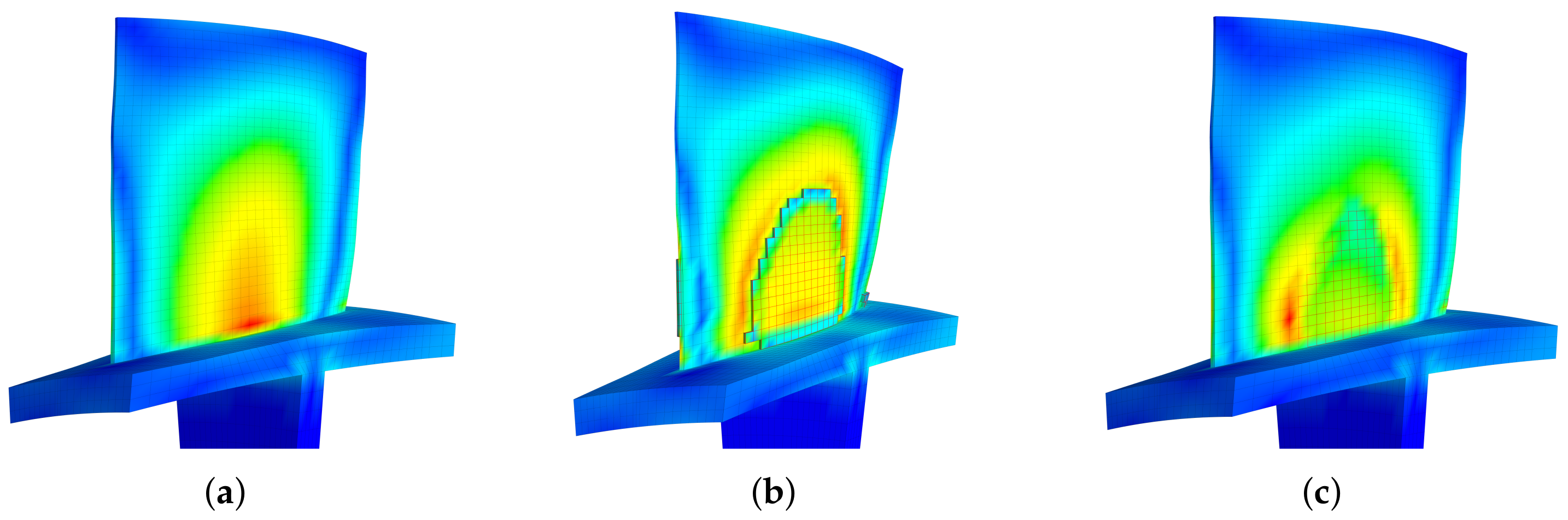
- Extract the blade surface elements strain. It should be noted that the strain need to be calculated at the element local coordinate system, and the way to set local coordinate system is shown in Figure 5b. Use the strain to calculate the electric field intensity of each element based on Equation (12). Then, sort the element according to the electric field intensity . Note that element strain is an averaged value from the distributed strain in the element. In principle, it could even generate a null field (for example in a cantilever beam, if the element is located at the neutral axis in a pure bending). To avoid this abnormal situation, it is suggested to have a finer mesh so that the strain does not vary significantly inside a single element.
- 3.
- Choose the way to place the piezoelectric material.
- (a)
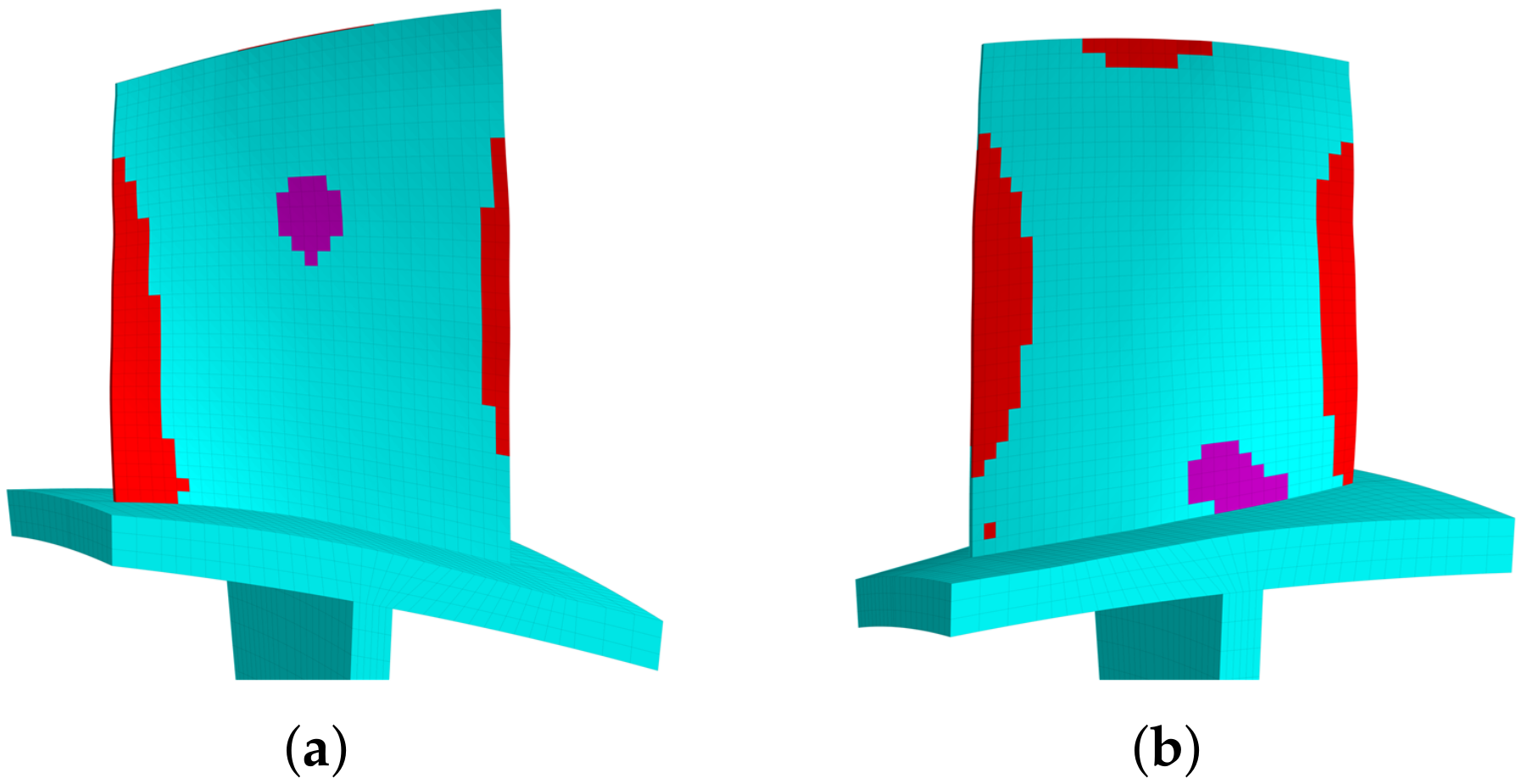
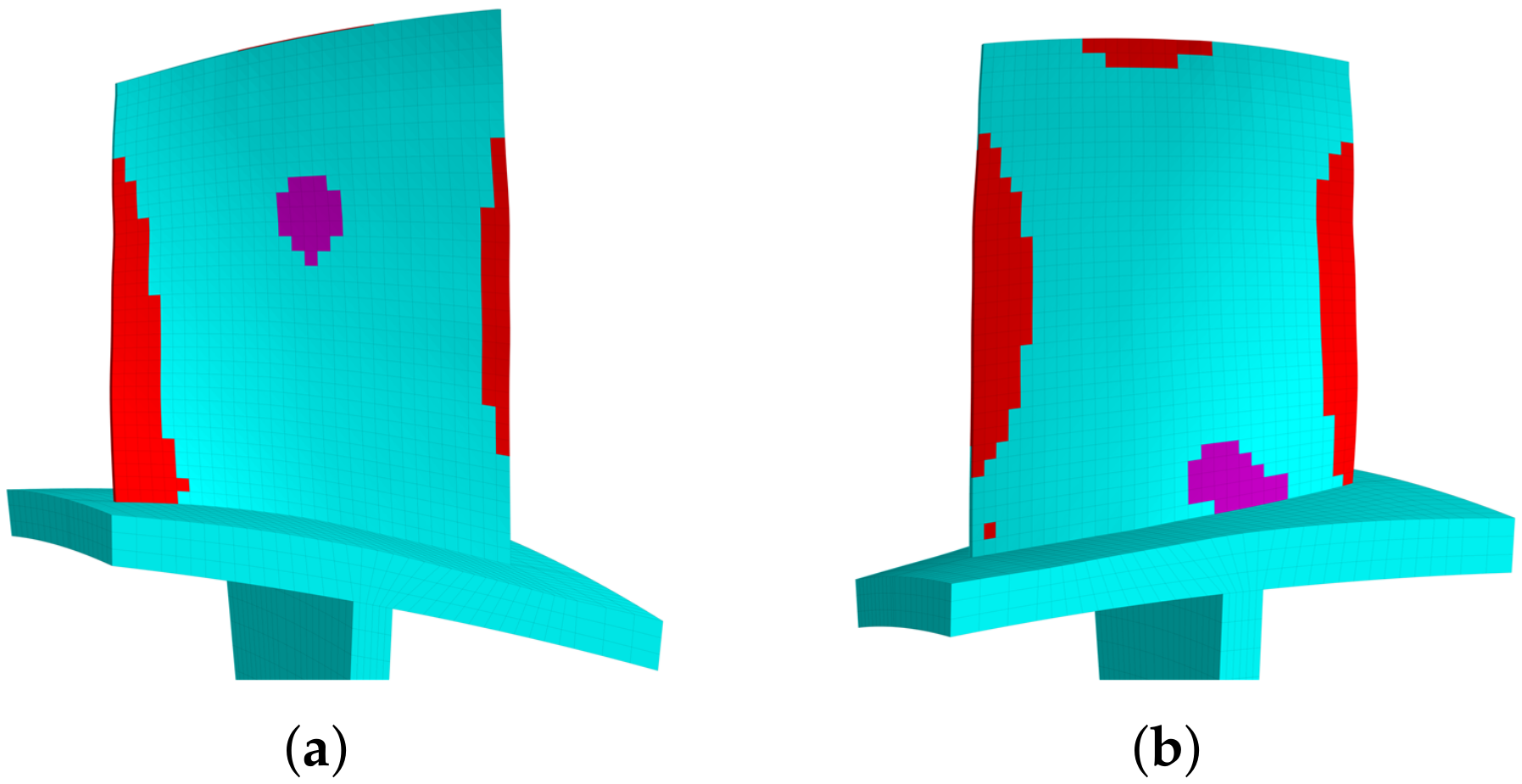
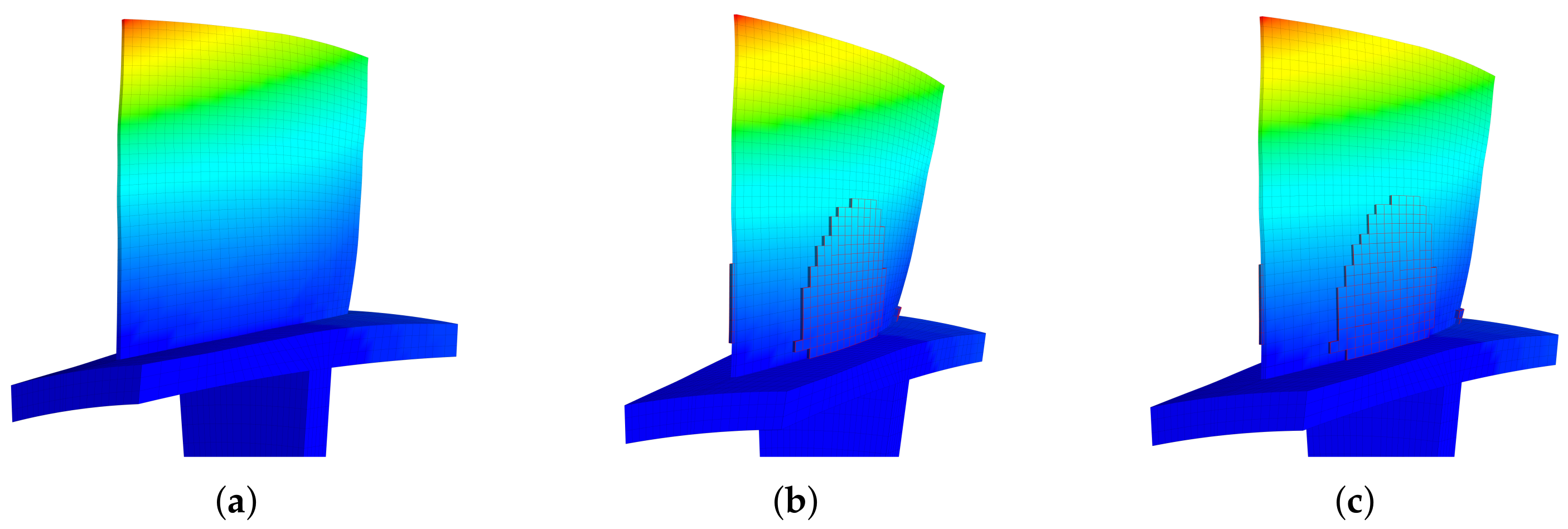
- If the piezoelectric materials are embedded to the blades. First, set the elements coordinate system of the blade surface elements. The z direction of the local coordinate system is along the outward normal direction of the blade surface. Then, replace the blade surface elements with the piezoelectric material elements. In ANSYS, this means changing element type from SOLID185 to SOLID226. The criterion is replacing the blade element based on the electric field intensity from the largest ones until the mass ratio meets the condition.
- (b)
- If the piezoelectric materials are bonded to the blades. We generate new elements along the norm direction of the blade elements. Namely, we will create a new layer of elements on the installation place. The remaining operations are the same as when we embed the piezoelectric materials.
- 4.
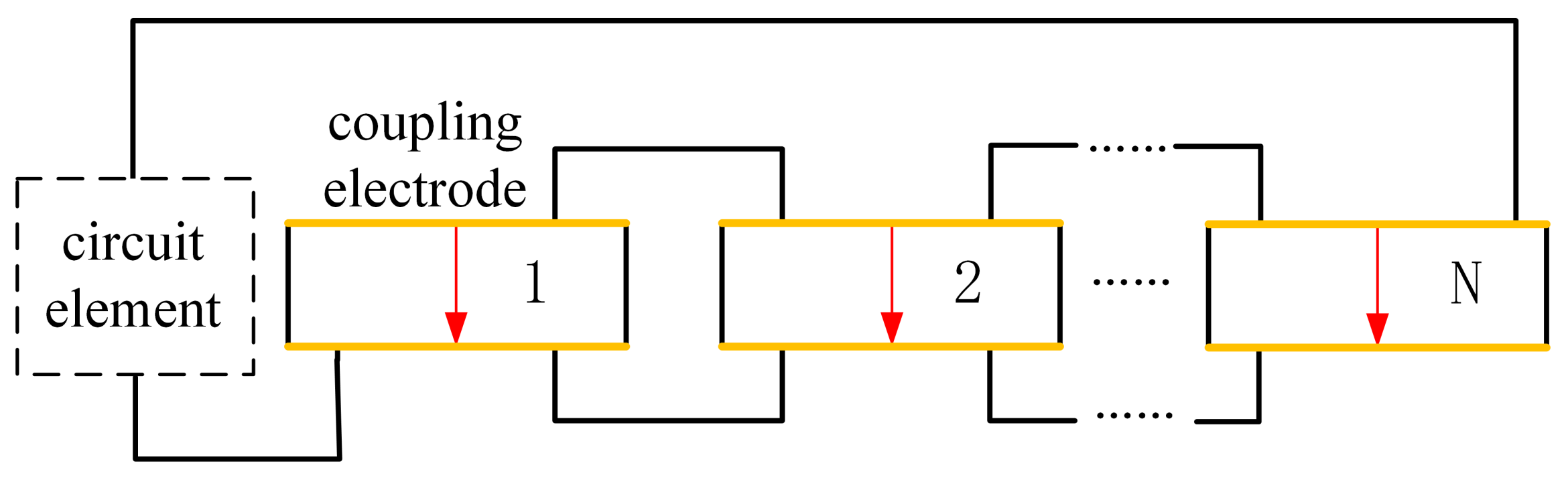
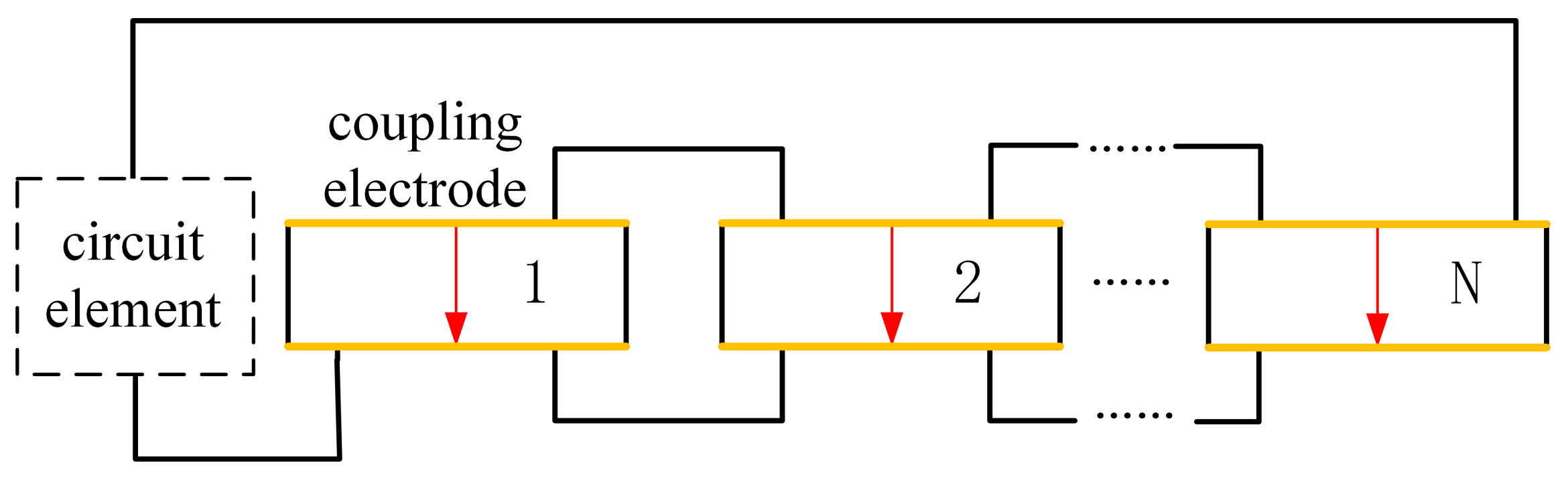
- Simulate the electrodes. The electrodes applied on a continuous area of piezoelectric materials are modeled by coupling the voltage DOFs on the top and bottom surfaces.
- 5.
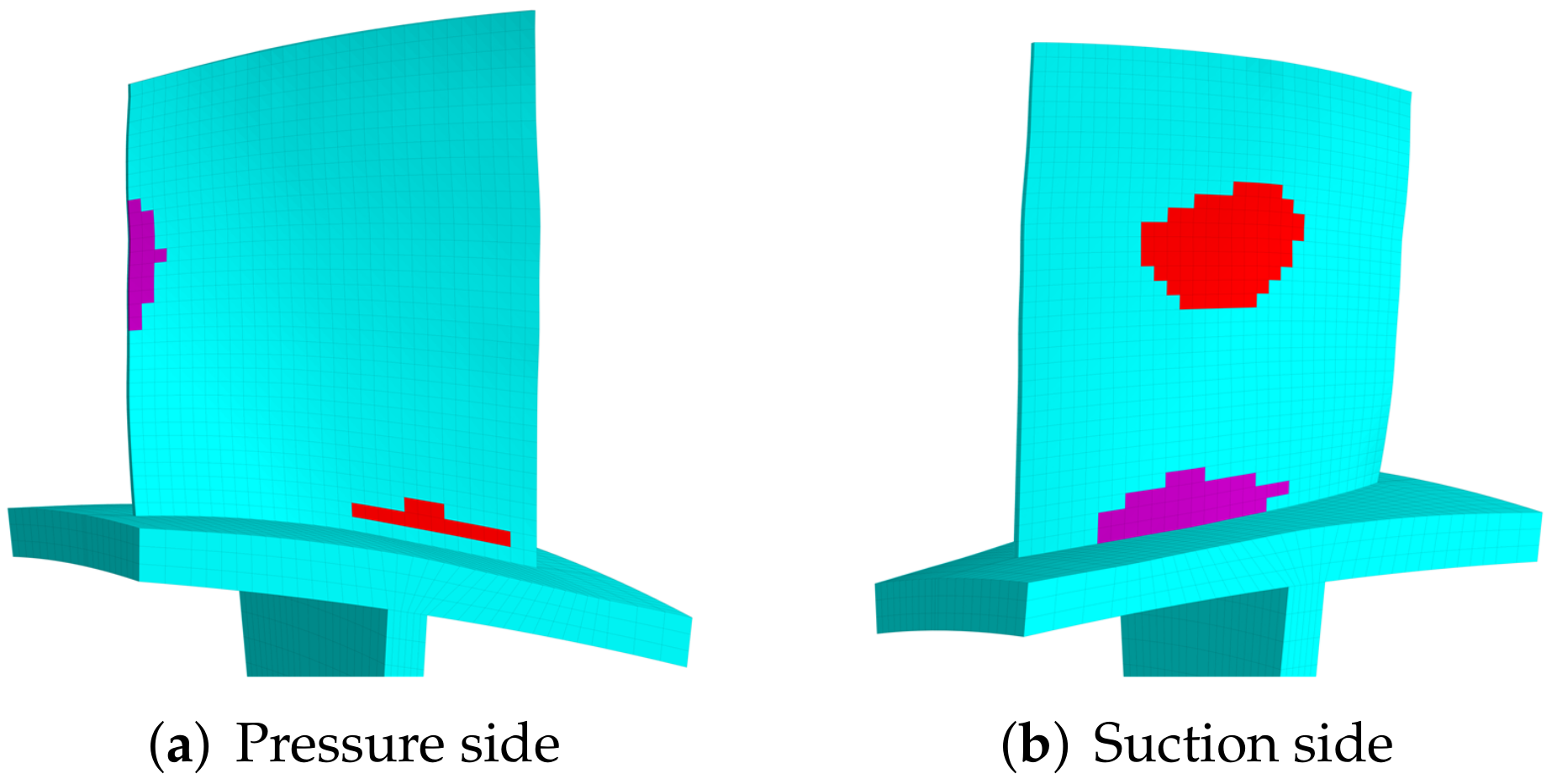
- Interconnect discontinued piezoelectric materials on the blade. After the optimization, there may be several discontinued areas of piezoelectric materials. We will interconnect their electrodes so there is only one port on each blade, as shown in Figure 7. To do this, the poling direction of some areas should be reversed so that all the areas have the same signs of charges. Based on the sign of electric field intensity , we can judge the poling direction.
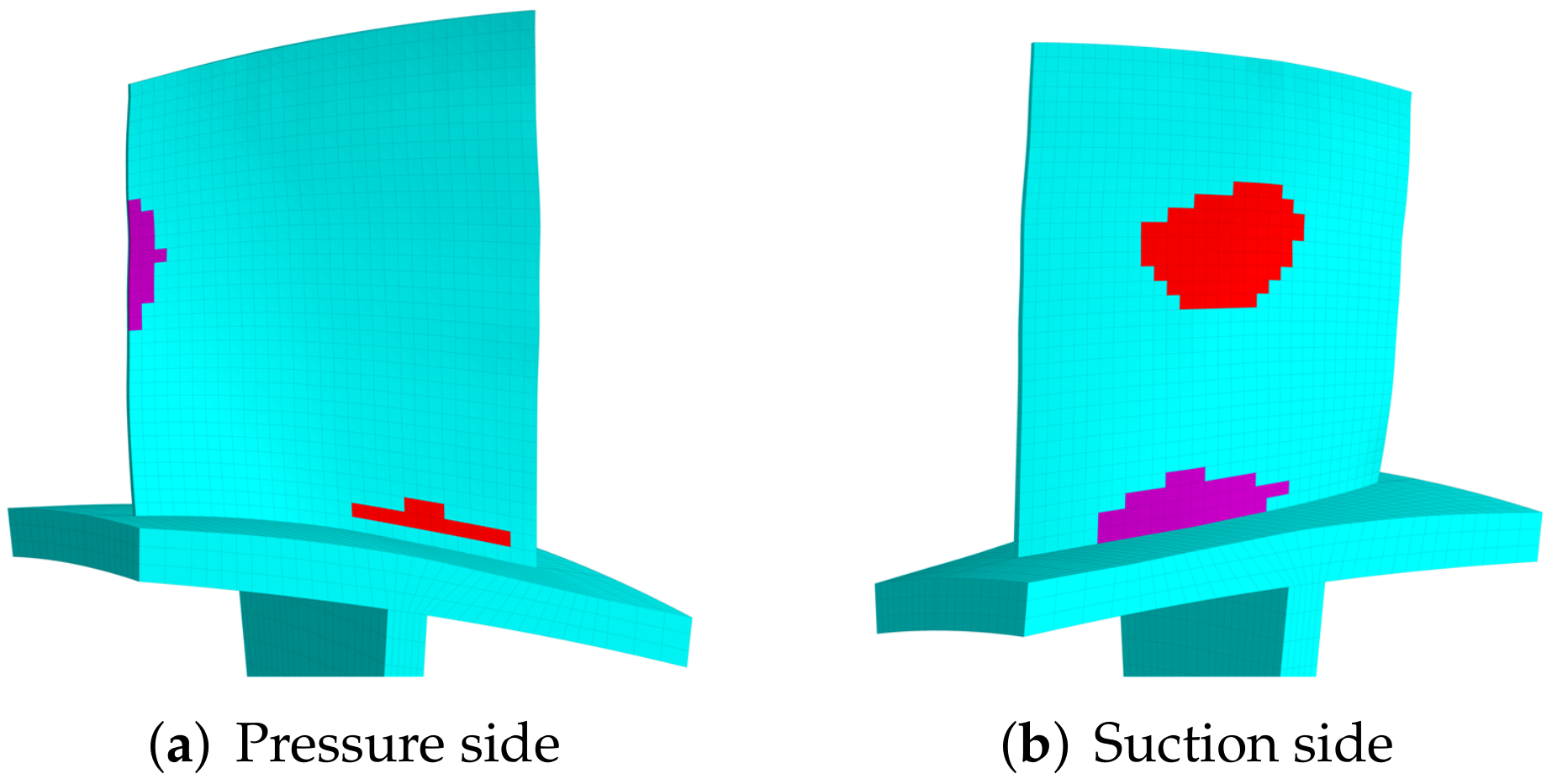
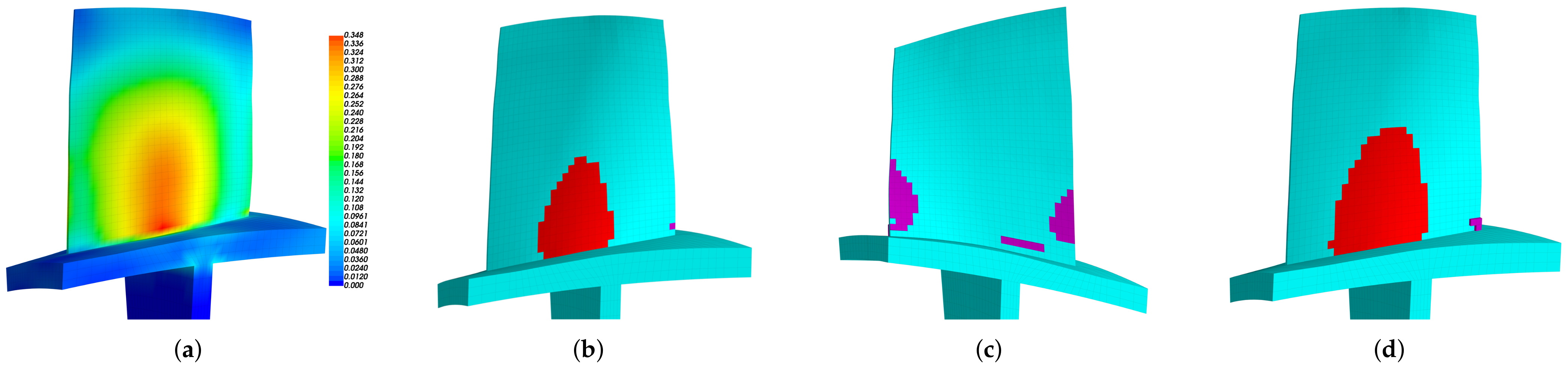
3.3. Optimized Distributions of Piezoelectric Materials on the Blade
4. Intentional Capacitance Mistuning to Improve Aeroelastic Stability
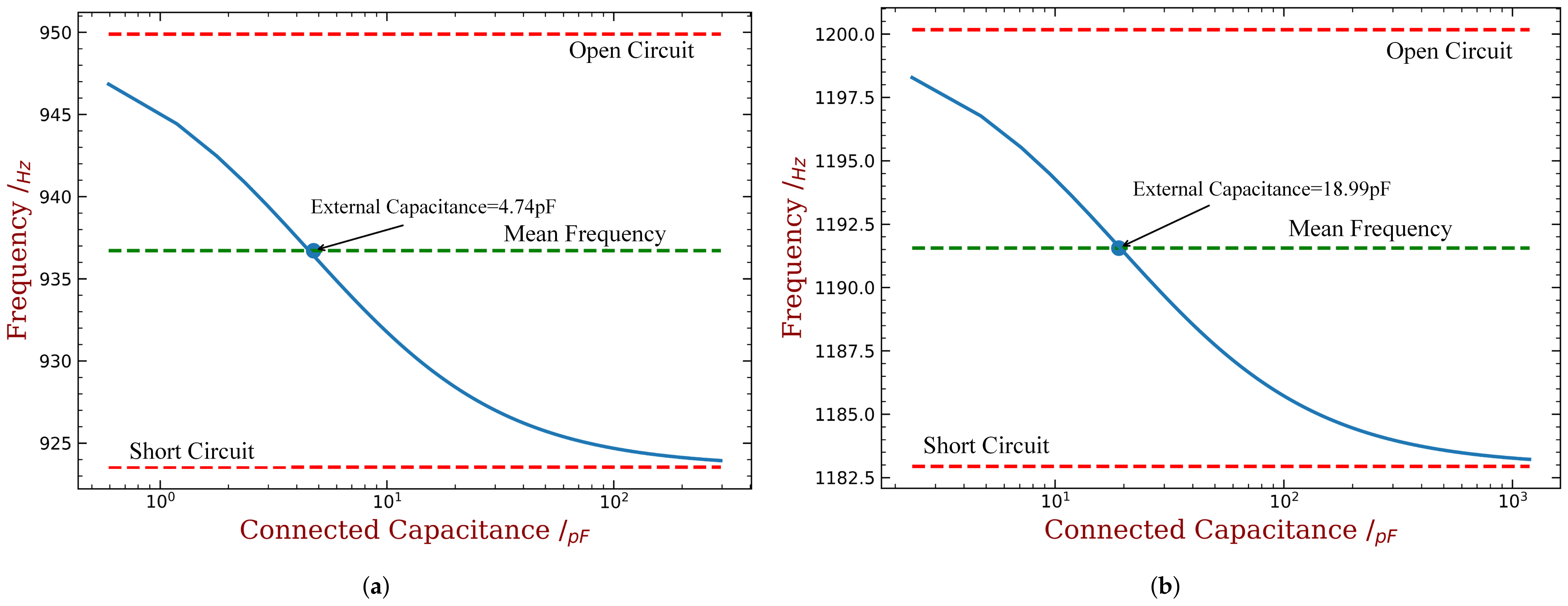
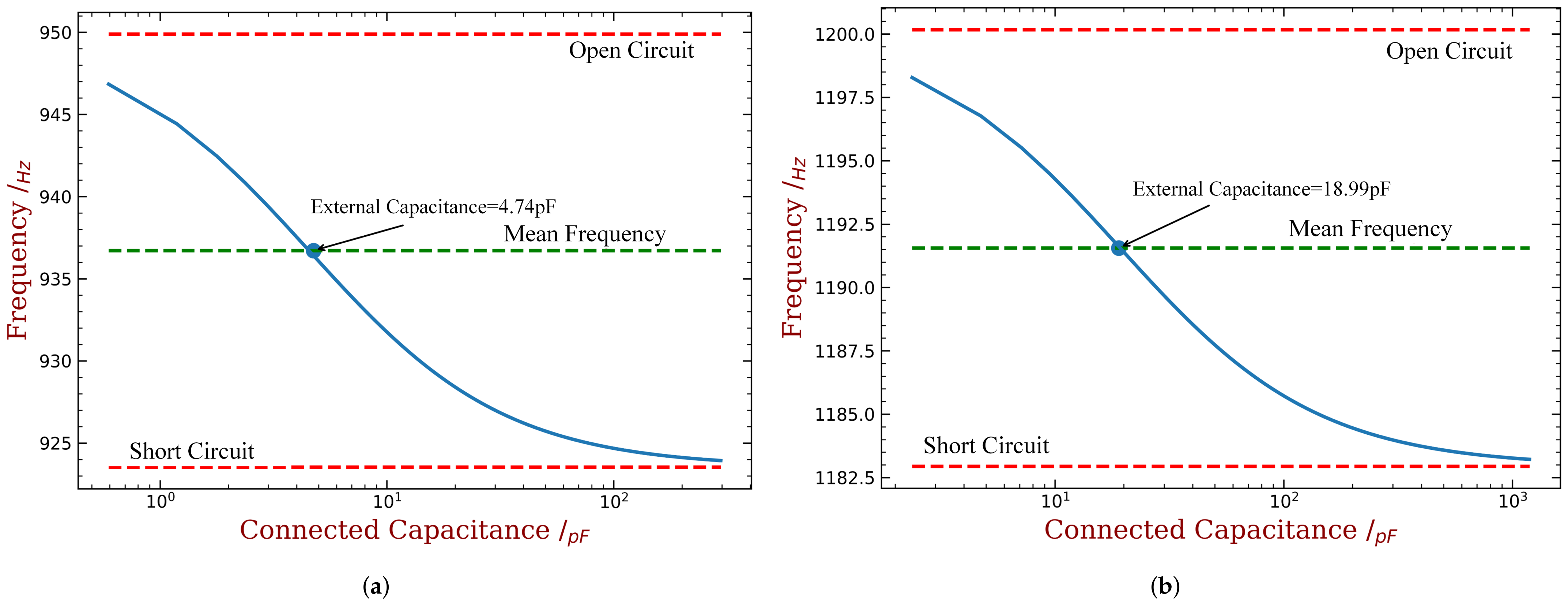
4.1. The Relation between Frequency Deviation and Shunt Capacitance
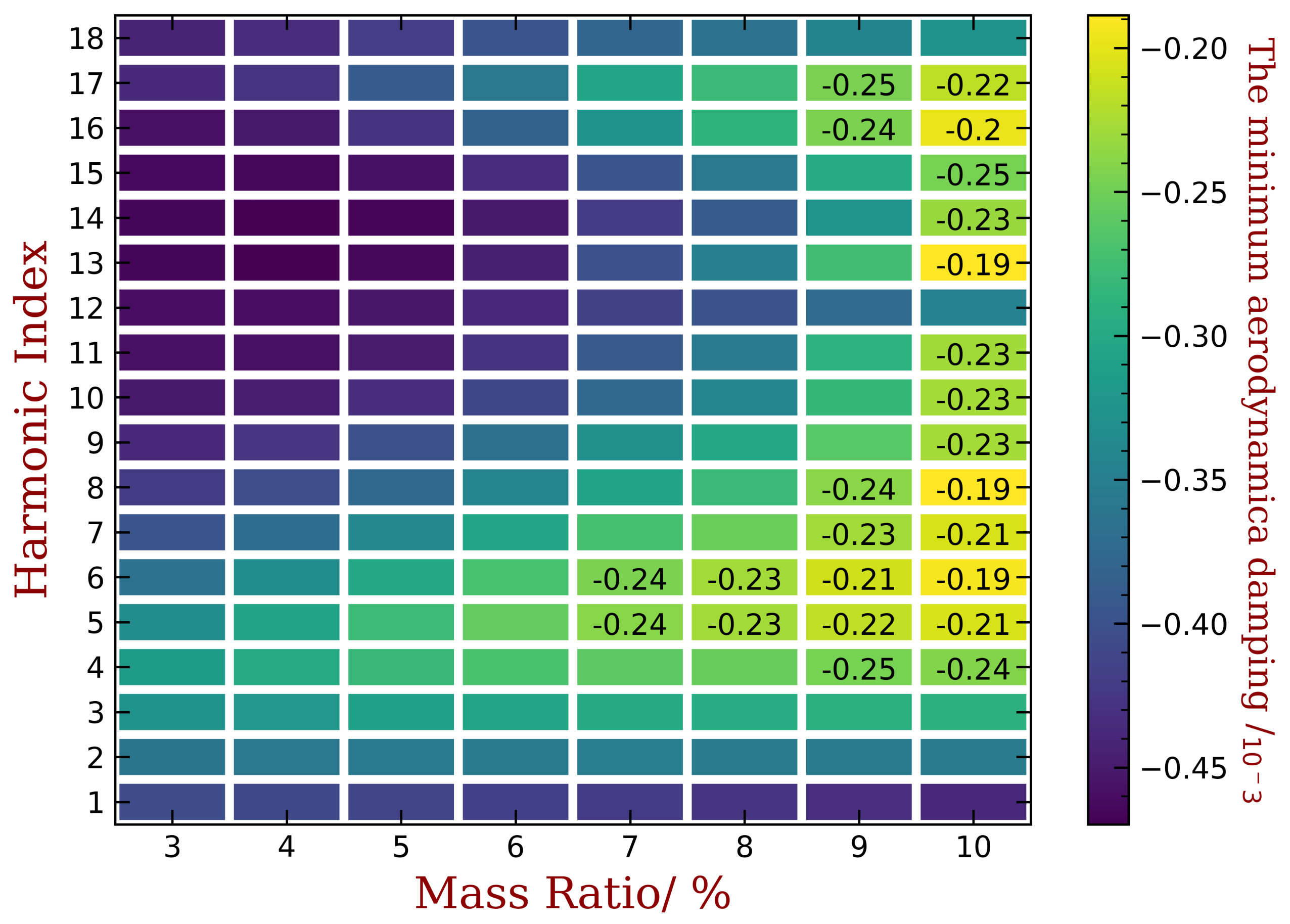
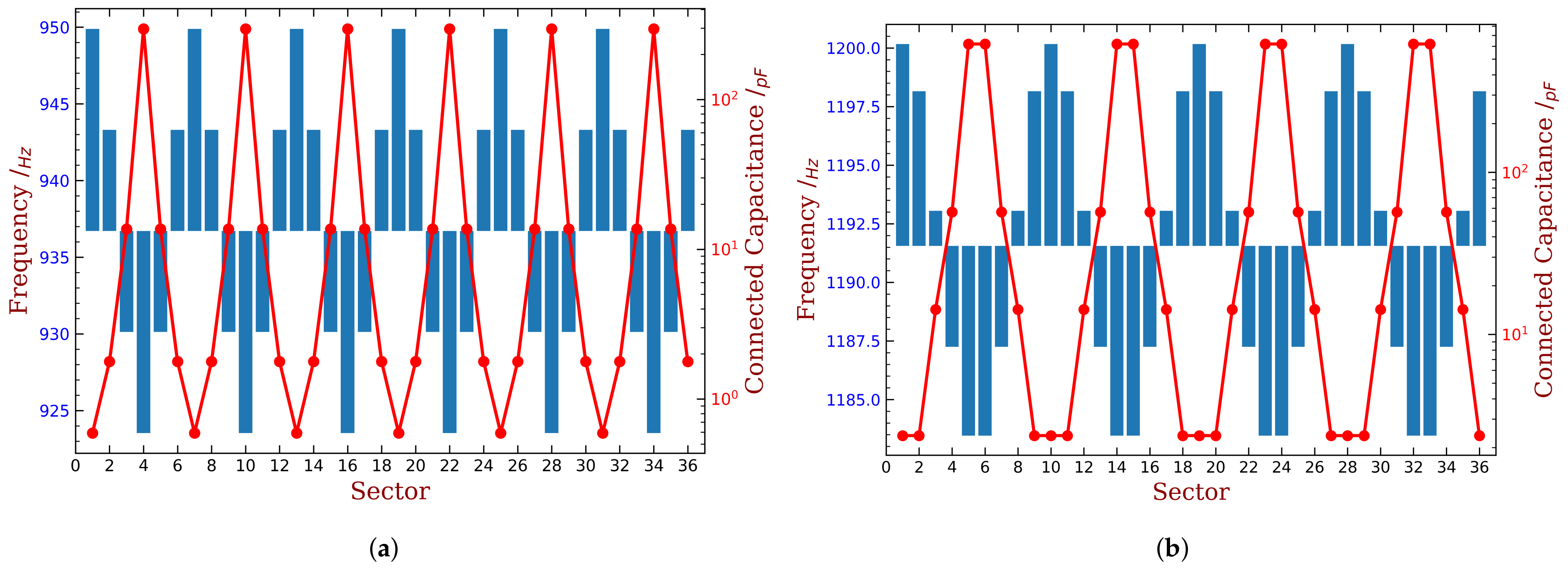
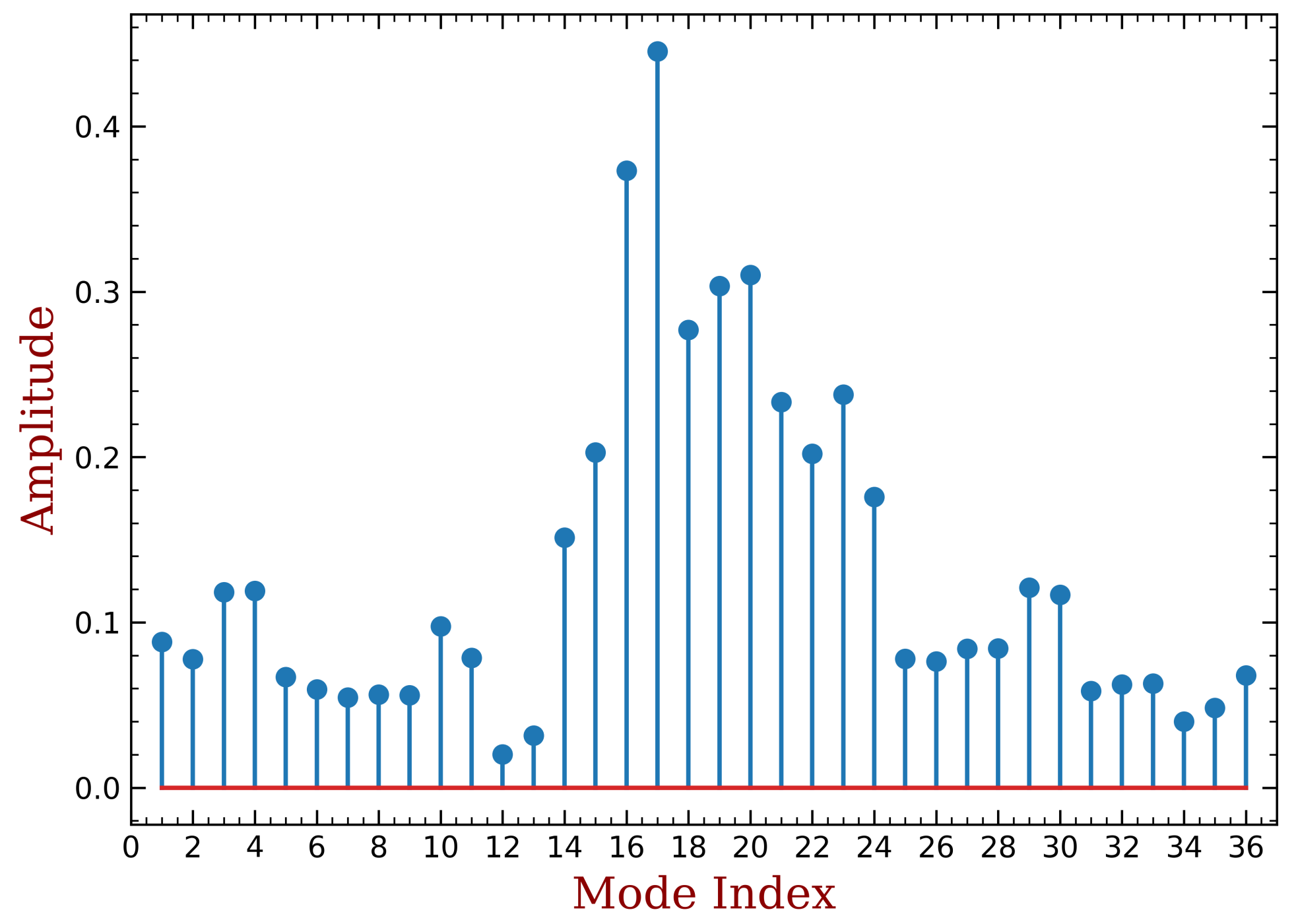
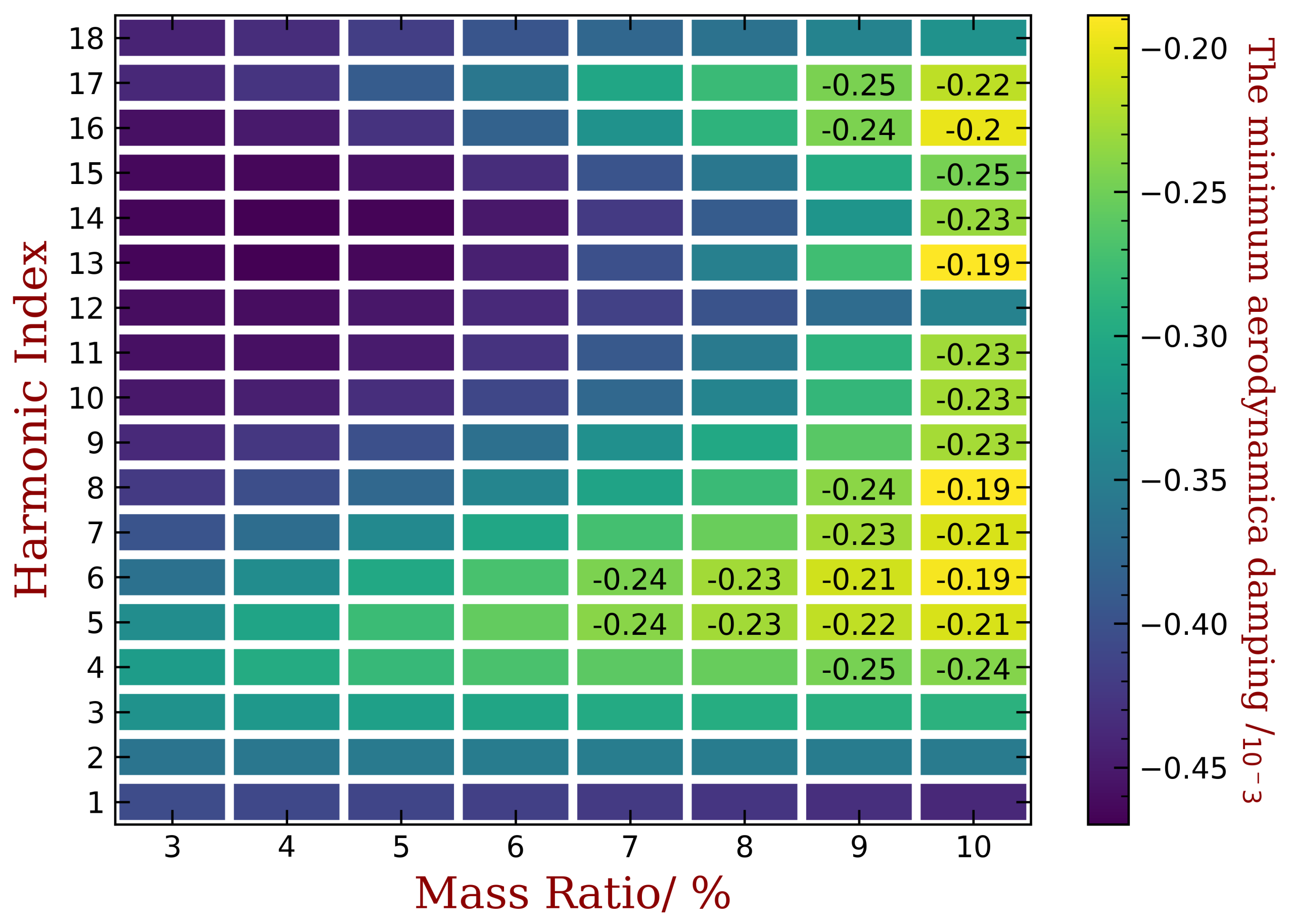
4.2. Mistuning Pattern Design
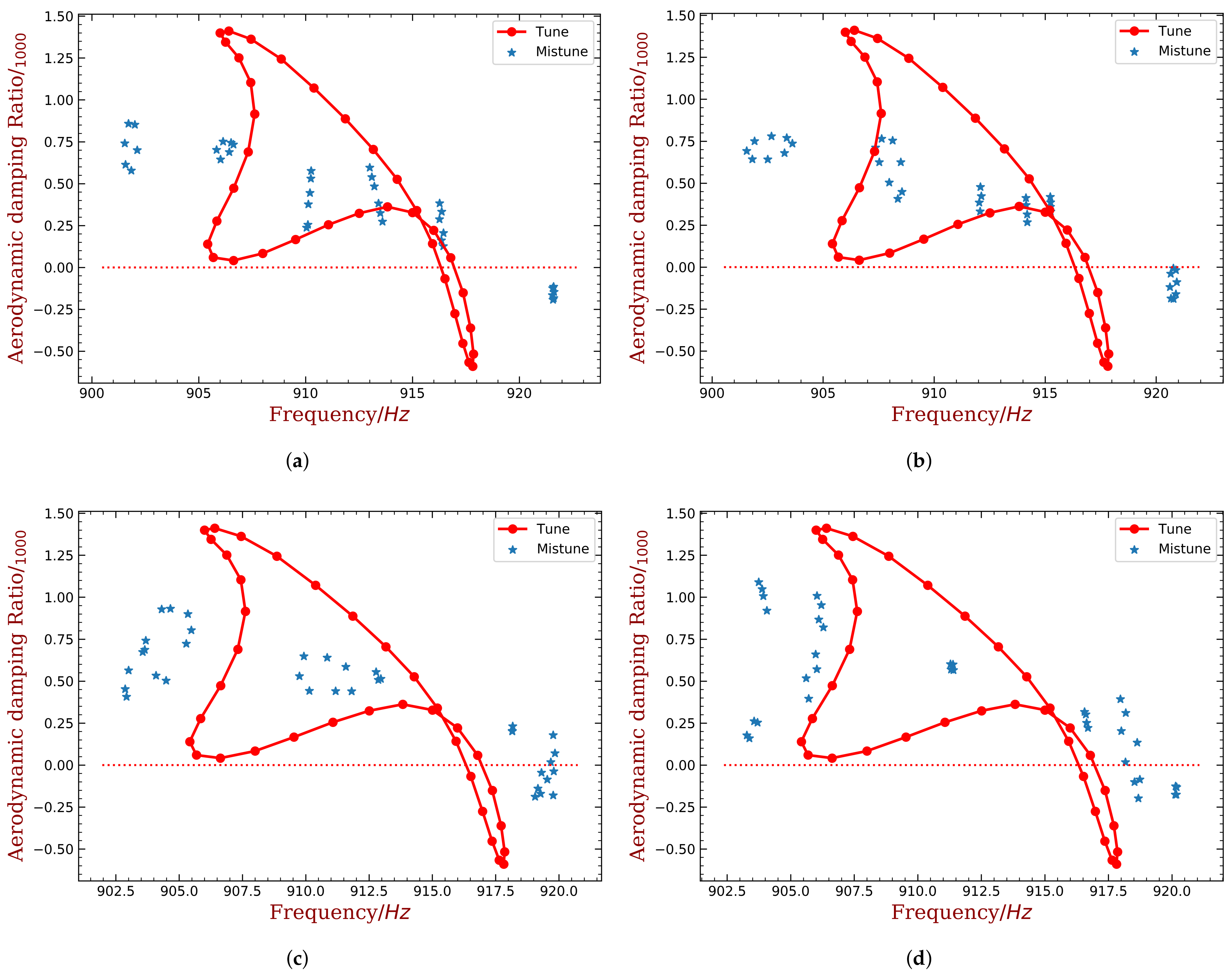
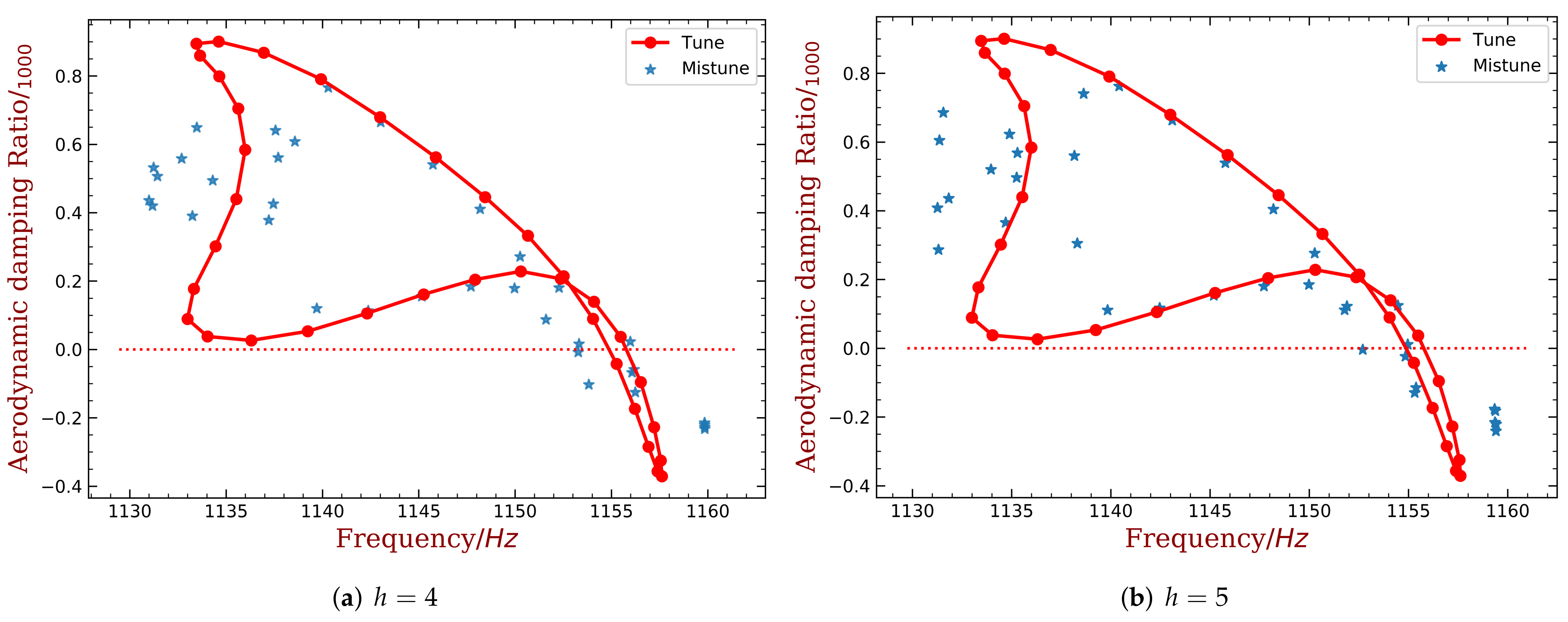
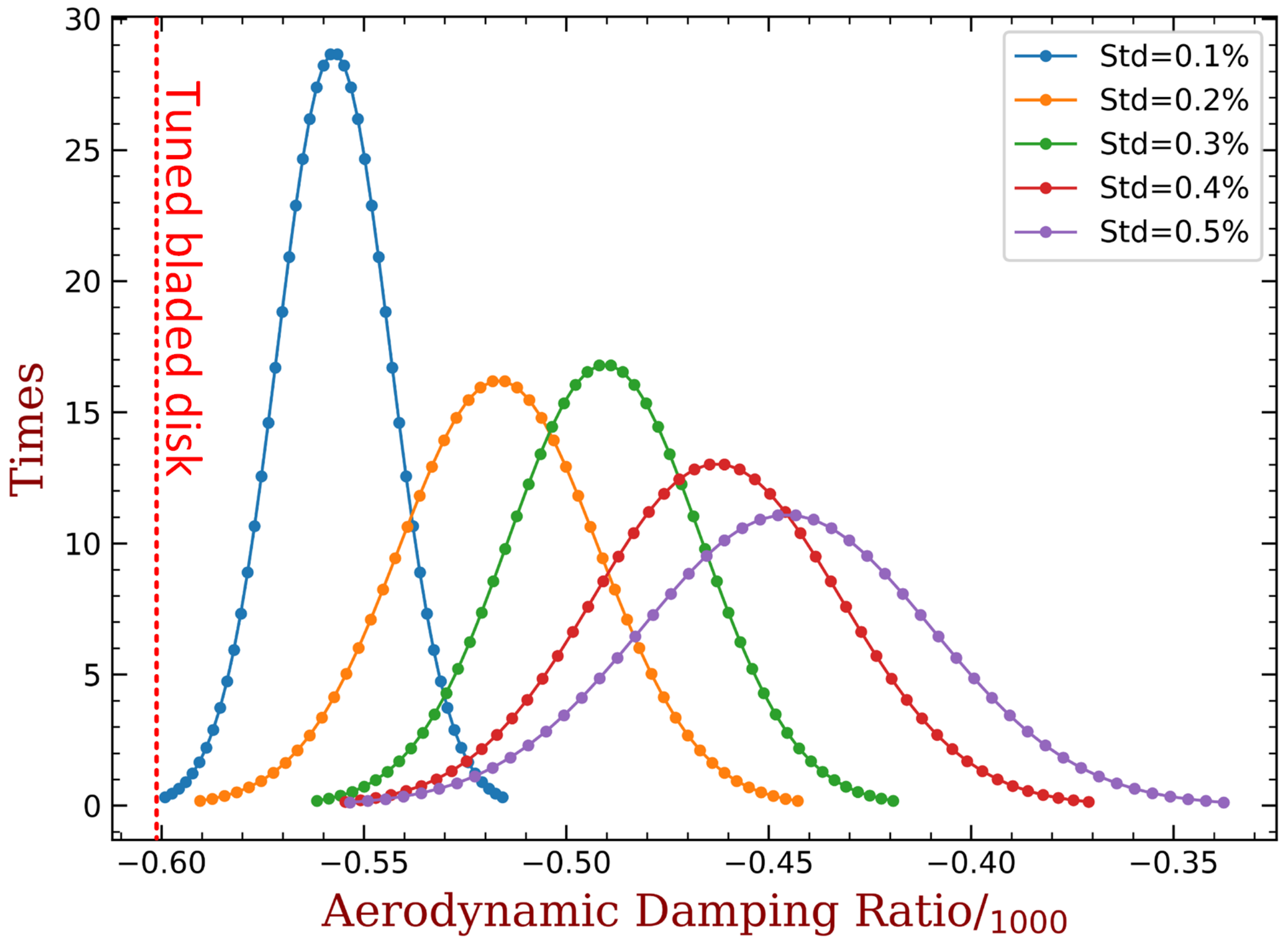
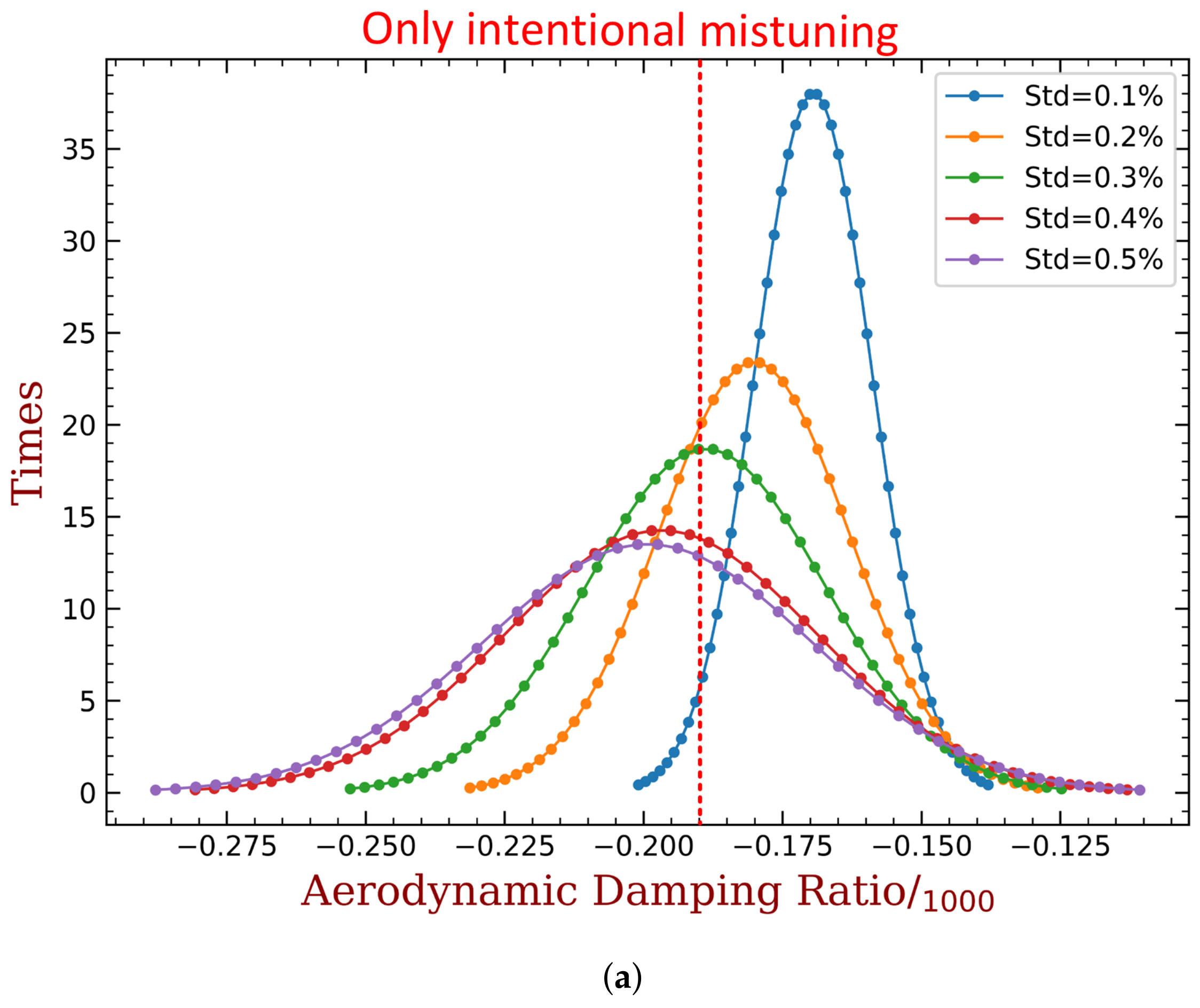
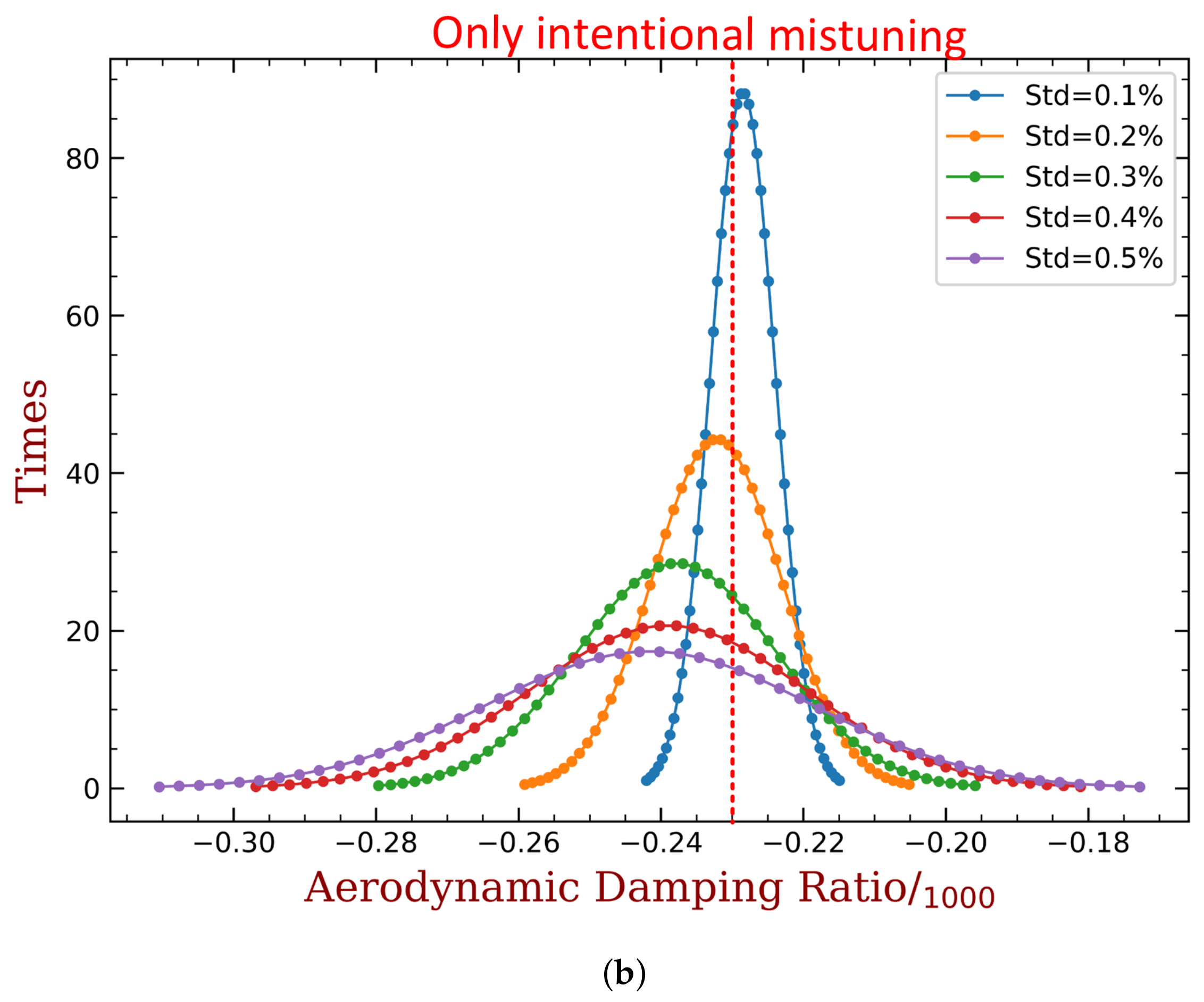
4.3. Effects of Random Mechanical Mistuning
5. Conclusions
- Herein, an adaptive method based on the piezoelectric technique to improve the aeroelastic stability of the bladed disk is proposed. The basic idea is to bond or embed piezoelectric materials to each blade and use different shunt capacitance on each blade as the source of mistuning. We show that the required small difference of stiffness among blades is altered into a relatively larger difference of the shunt capacitance. This provides a more feasible and robust way to implement the intentional mistuning.
- A method to determine the distribution of piezoelectric materials have been established. A linearly weight strain indicator is used as the optimization criterion, whose physical meaning is the absolute value of the electric field. The theoretical basis of this method is clarified. The method is adapted for FE model and has no assumptions on the geometrics of piezoelectric materials. It only needs a single modal analysis of the bladed disk and a given threshold of the mass ratio, and eventually yields the best distribution of piezoelectric materials for the targeting mode(s). The obtained shapes are described by the edges of the finite elements so they are non-smooth. One can choose to use the rounded or rectangular piezoelectric materials that can be purchased with ease, to cover the targeting area obtained by the proposed method. Alternatively, one can choose to customize the piezoelectric materials after smoothing the edges. In either way, the proposed method can provide a good starting point.
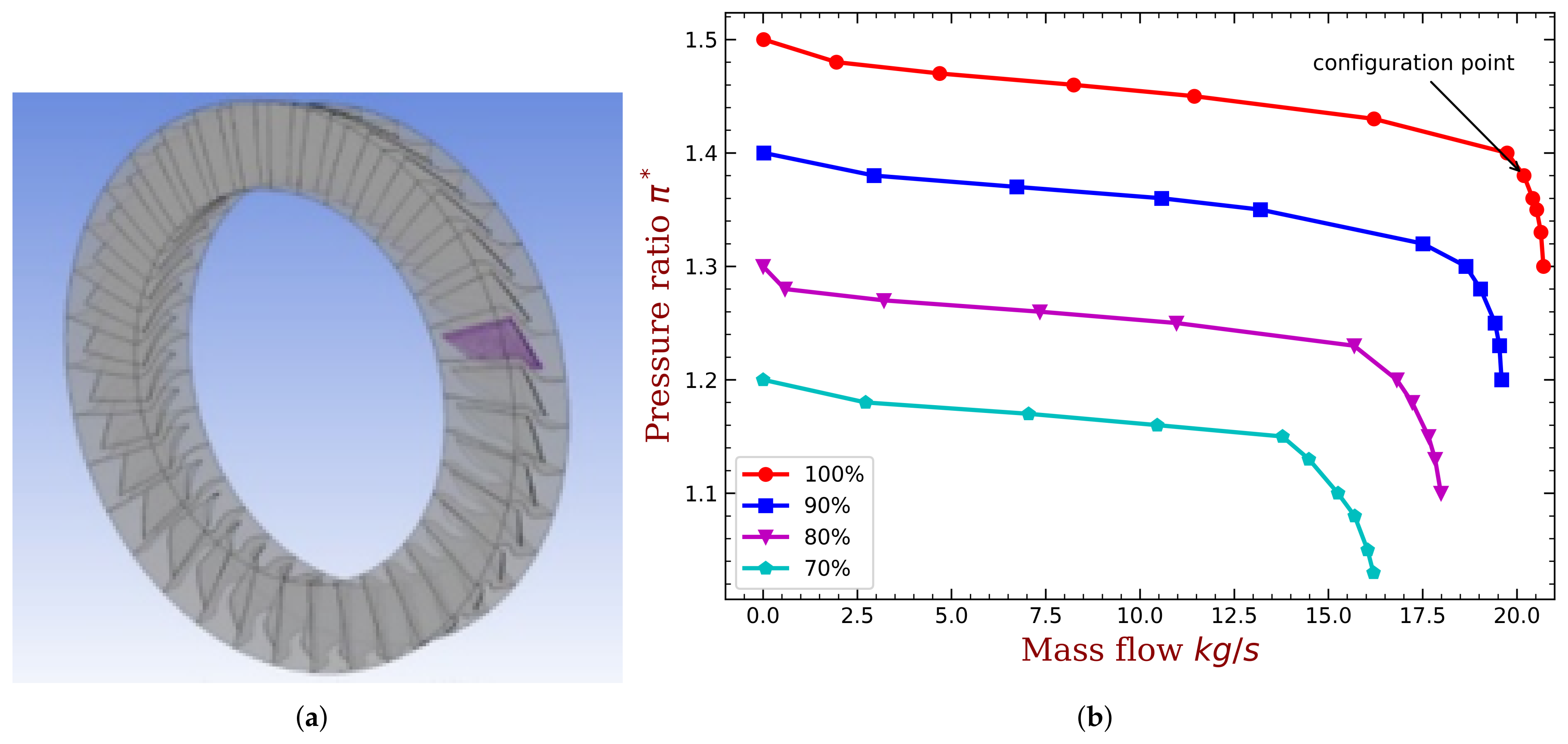
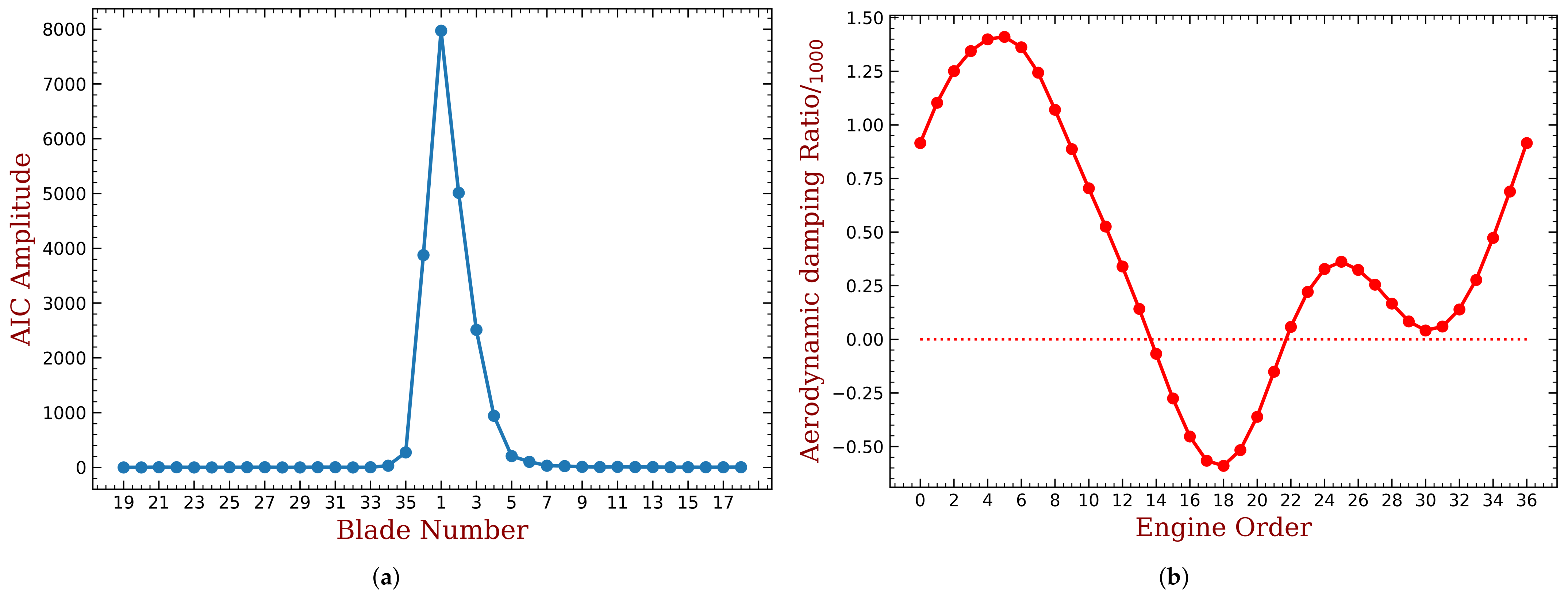
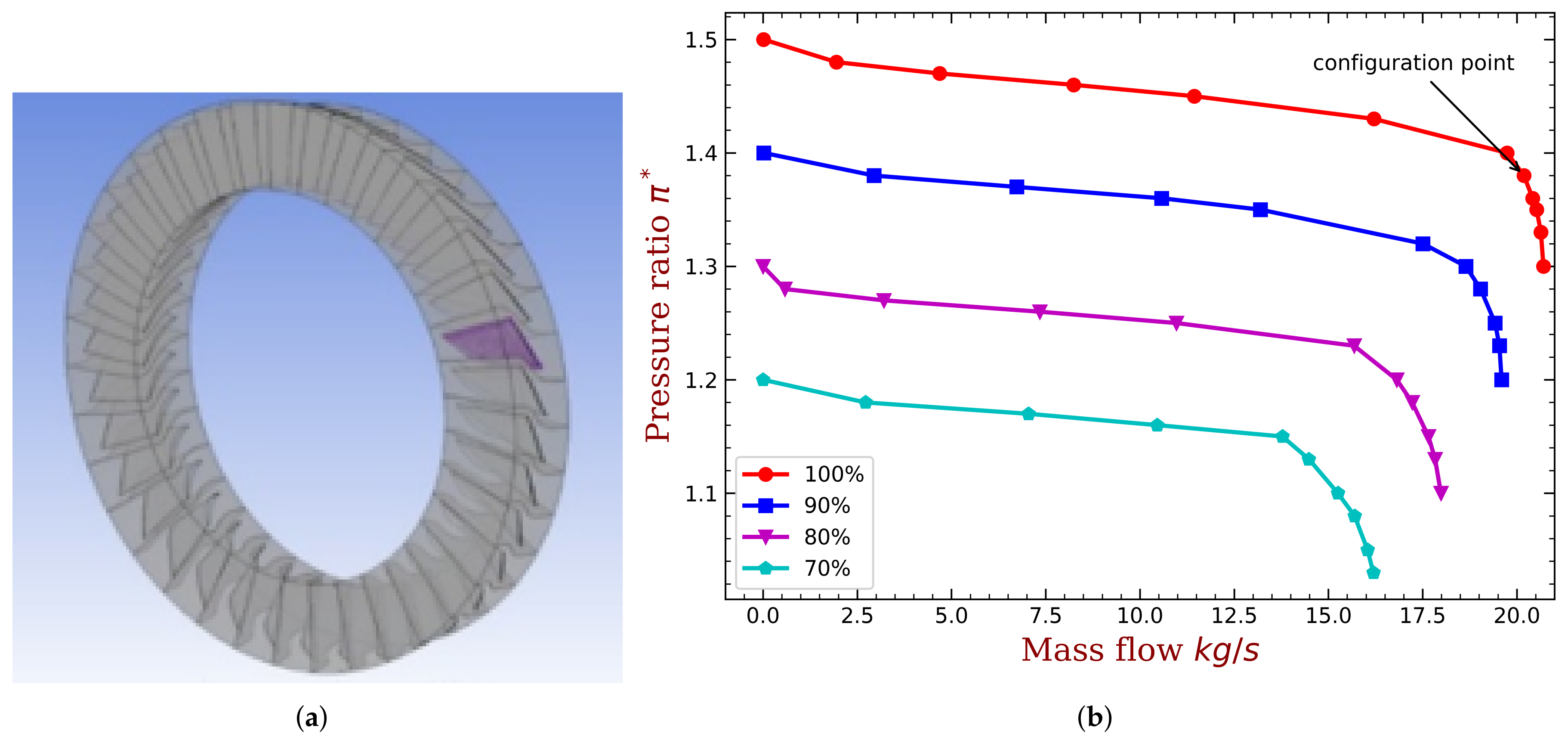
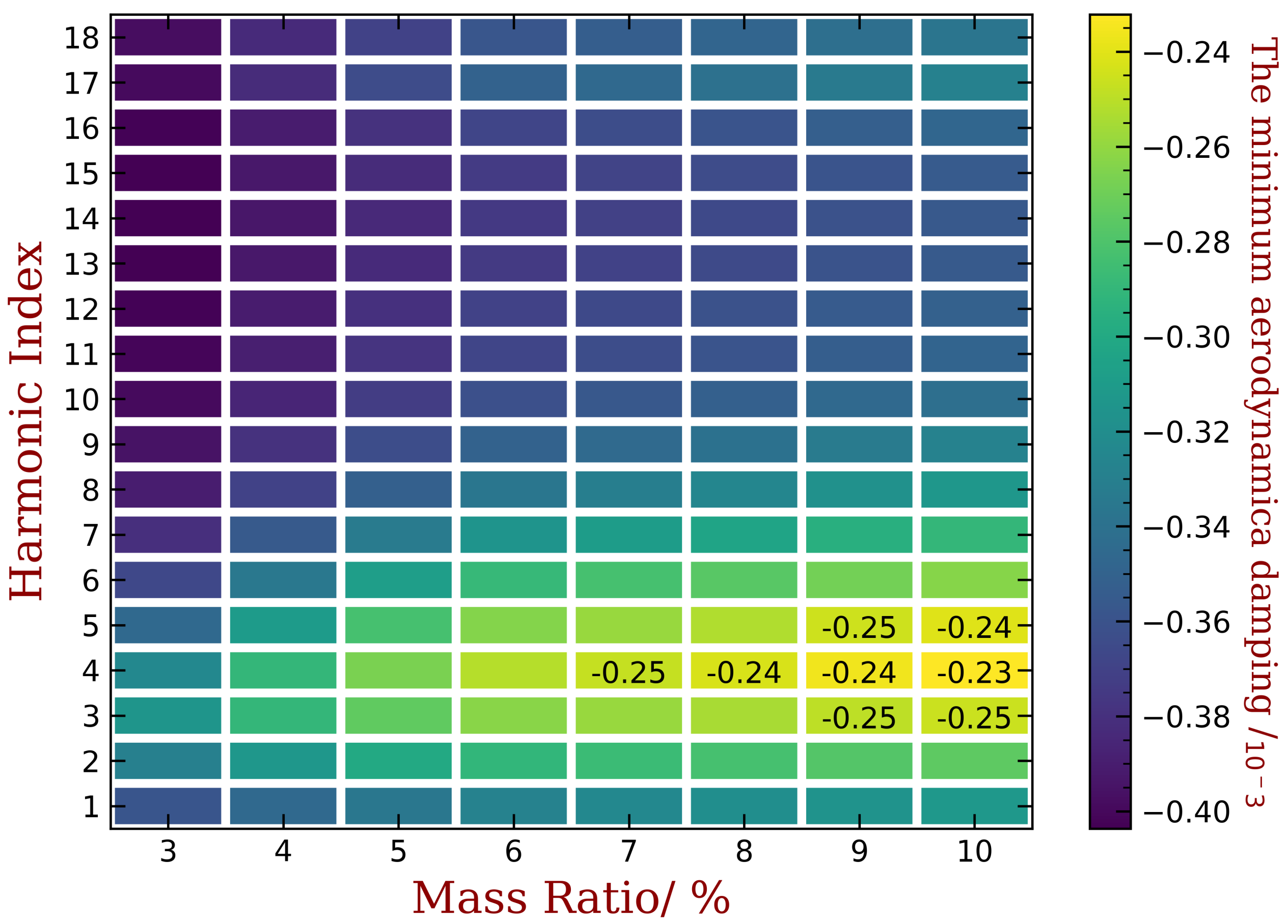
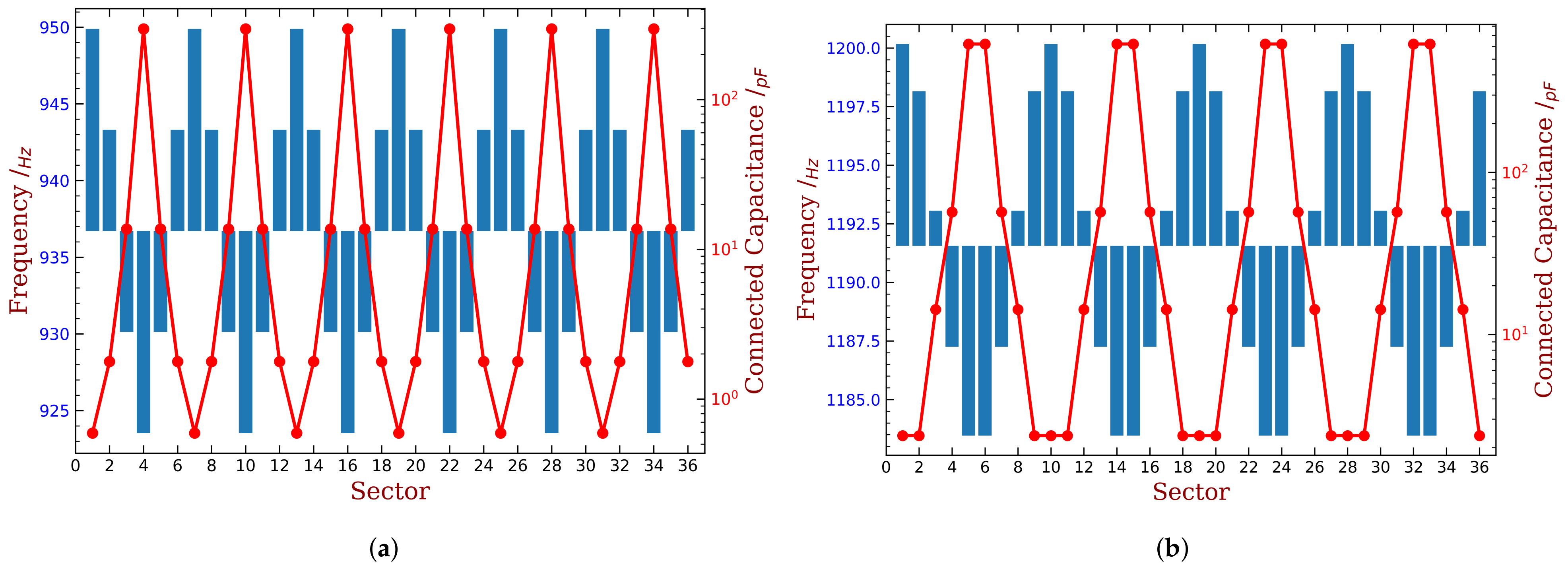
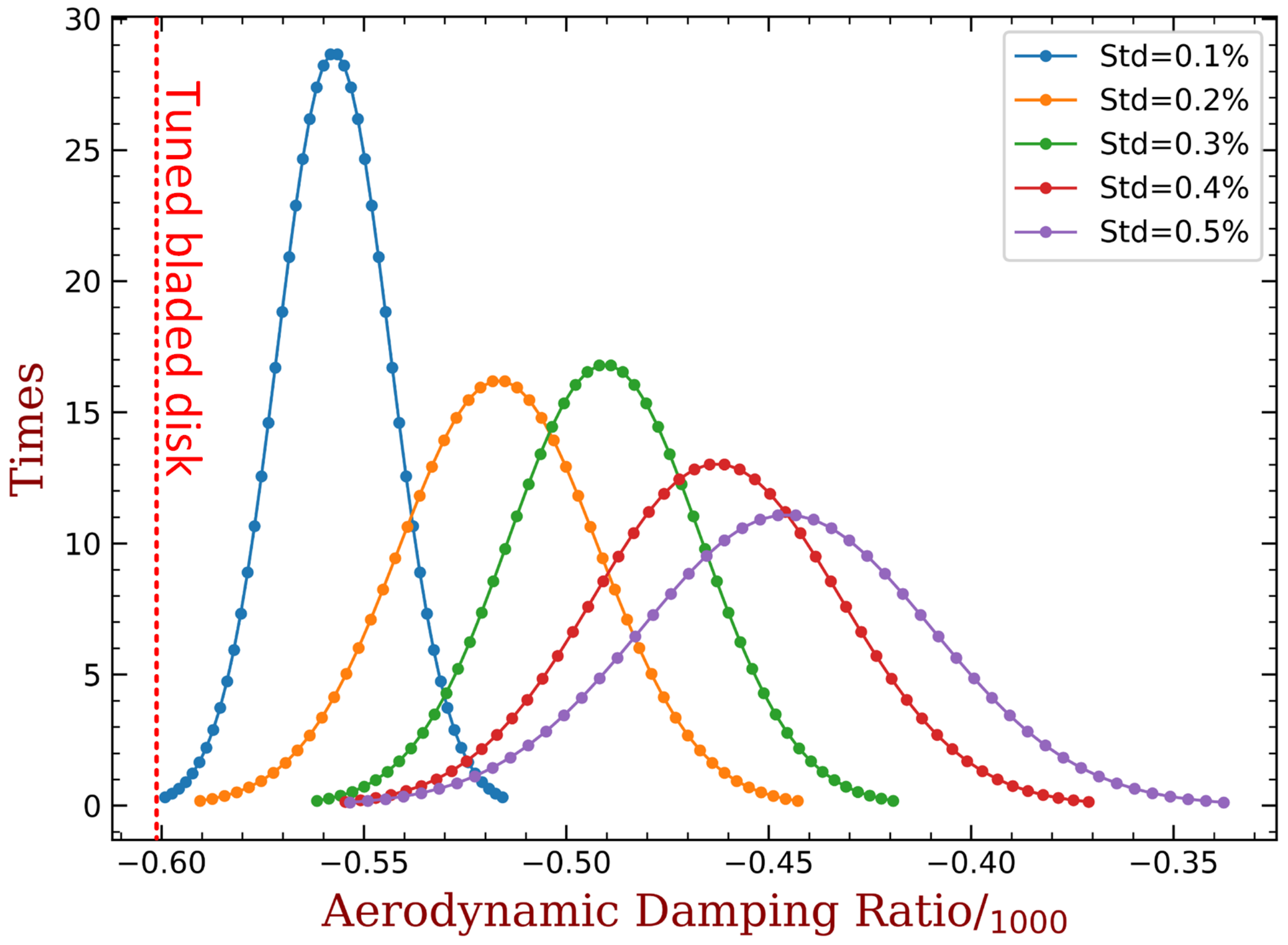
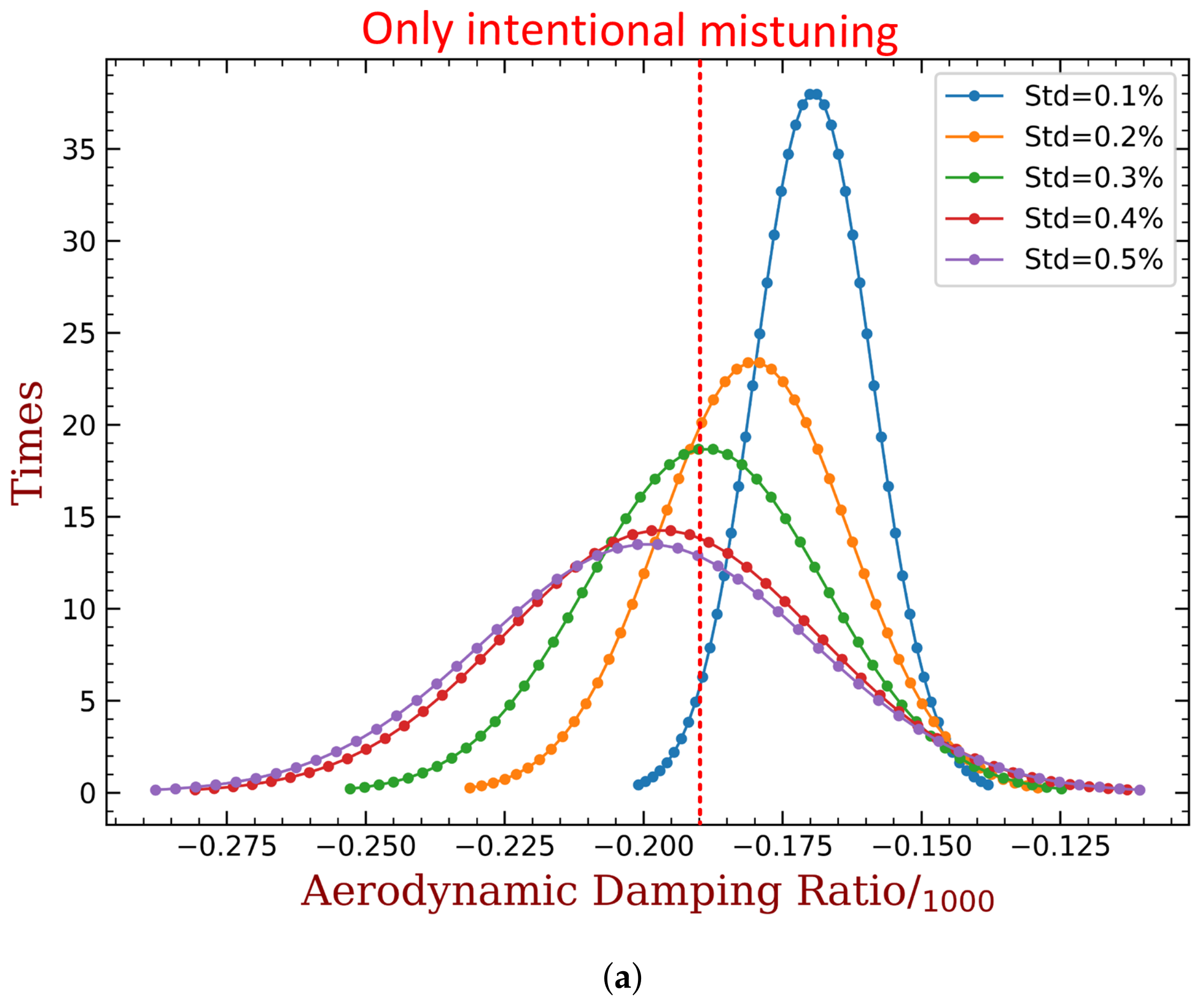
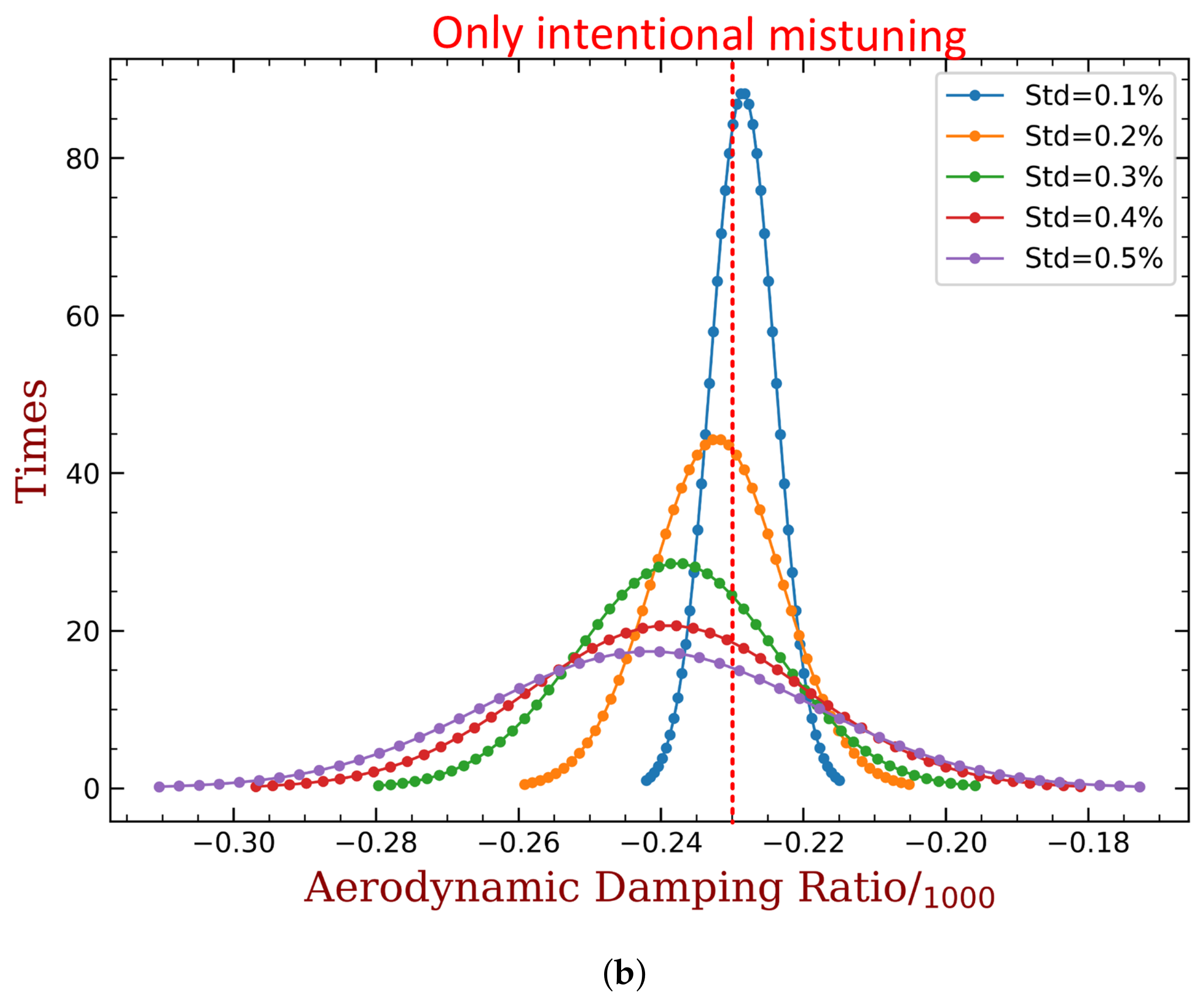
- An empirical bladed disk with NASA-ROTOR37 profile is used as an example. For the first bending mode of the blade, only using piezoelectric materials with a mass of 10% of the blade mass can reduces the unstable margin from 0.6‰ to 0.2‰. The required capacitance is varying from several to hundreds pF, and this can be purchased with easy. These quantitative results demonstrate that the proposed method is very promising.
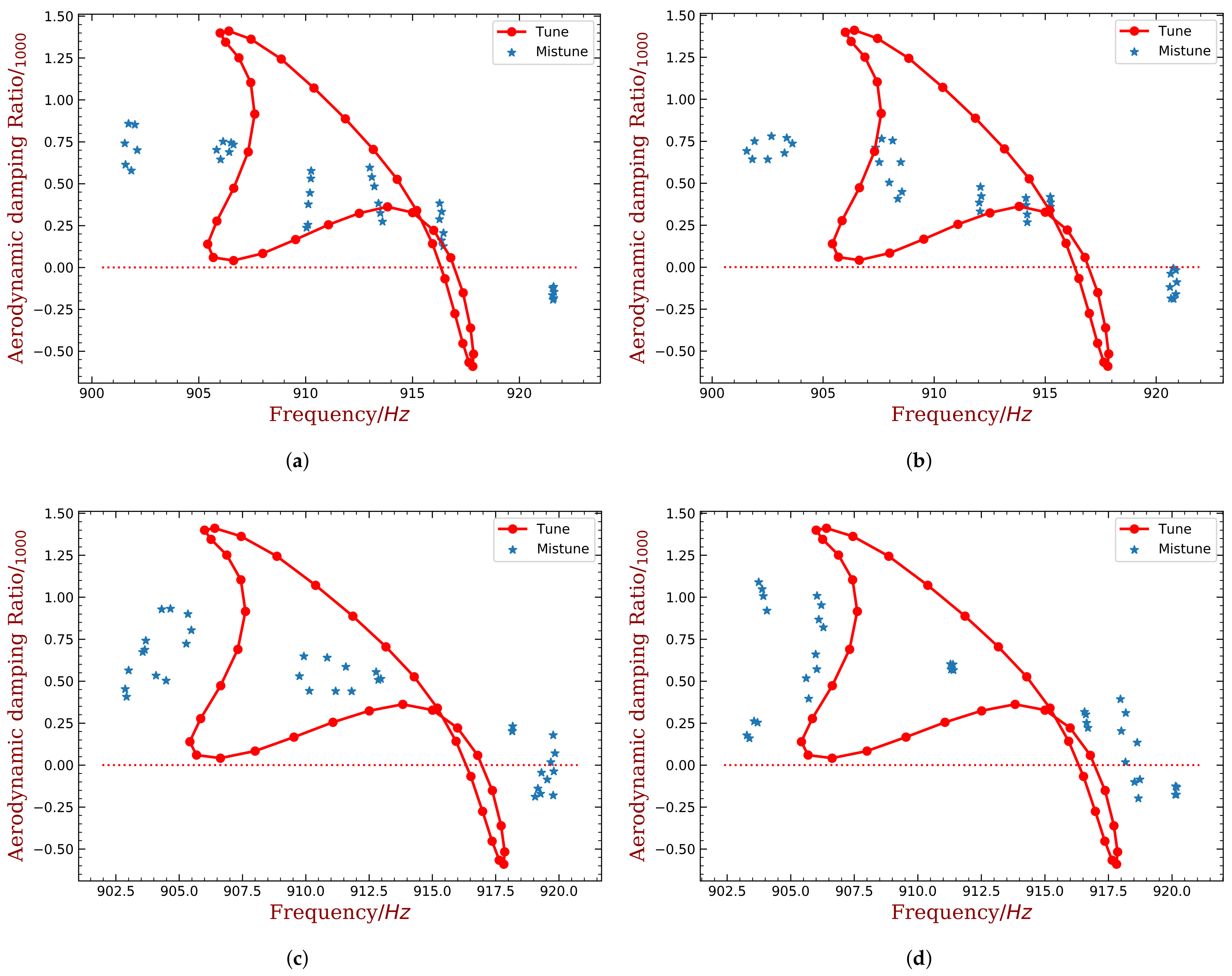
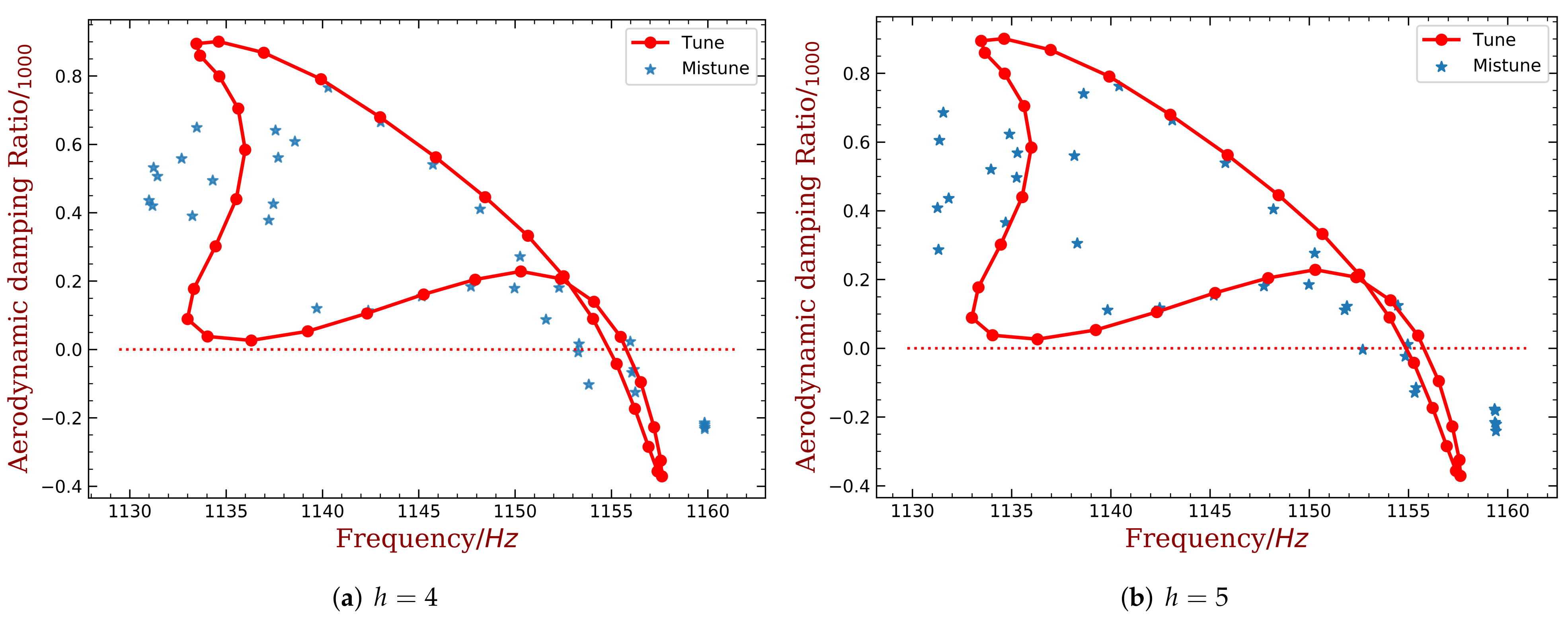
- The proposed method shows good robustness with the presence of random mechanical mistuning. We show that additional (and inevitable) mistuning would somewhat weaken the performance of intentional mistuning imposed by capacitance variance. However, the stability of the system is still much better than the original case.
- There are two main challenges to be resolved before the proposed method can be further applied to real engineering products. The first one is the installation of piezoelectric materials (PZT, MFC and so on). In the laboratory environment, they are often glued to the surface of host structures, and additional protection is required when testing in rotation status [39]. Alternatively, the piezoelectric materials can be embedded into composites [40], and thus avoid negative affects to fluid field. In this way, the wire and electric components can also be packaged. The reliability of such installation strategies needs thorough validation before they can be used in real aero-engines. The second challenge is the strength of piezoelectric materials. We should locate them to the places where stress level is relatively high, to achieve a stronger ability of the electric field to tailor the mechanical properties. In this case, whether the piezoelectric materials and the glue can withstand the tress level for a satisfying duration should be investigated. We are addressing this issue with on-going experiments.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Material Properties of PZT-5H
References
- Whitehead, D. Effect of mistuning on the vibration of turbo-machine blades induced by wakes. J. Mech. Eng. Sci. 1966, 8, 15–21. [Google Scholar] [CrossRef]
- Bendiksen, O. Flutter of mistuned turbomachinery rotors. In Proceedings of the American Society of Mechanical Engineers, International Gas Turbine Conference and Exhibit, 28 th, Phoenix, AZ, USA, 27–31 March 1983. [Google Scholar]
- Campobasso, M.; Giles, M. Analysis of the effect of mistuning on turbomachinery aeroelasticity. In Proceedings of the 9th International Symposium on Unsteady Aerodynamics, Aeroacoustics and Aeroelasticity of Turbomachines (ISUAAAT 2000), Lyon, France, 4–8 September 2000; pp. 4–8. [Google Scholar]
- Kielb, R.E.; Hong, E.; Hall, K.C. Probabilistic Flutter Analysis of a Mistuned Bladed Disk. In Proceedings of the ASME Turbo Expo 2006: Power for Land, Sea, and Air, Barcelona, Spain, 8–11 May 2006; pp. 1–6. [Google Scholar]
- Wang, P.Y.; Li, L. Parametric sensitivity for coupling vibration characteristics of bladed disk. J. Aerosp. Power 2014, 29, 81–90. [Google Scholar]
- Deng, P.C.; Li, L.; Li, C. Study on vibration of mistuned bladed disk with bi-periodic piezoelectric network. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 231, 350–363. [Google Scholar] [CrossRef]
- Nowinski, M.; Panovsky, J. Flutter Mechanisms in Low Pressure Turbine Blades. J. Eng. Gas Turbines Power 2000, 122, 82–88. [Google Scholar] [CrossRef] [Green Version]
- Panovsky, J.; Kielb, R.E. A Design Method to Prevent Low Pressure Turbine Blade Flutter. J. Eng. Gas Turbines Power 1999, 122, 89–98. [Google Scholar] [CrossRef]
- Srinivasan, A. Influence of Mistuning on Blade Torsional Flutter; NASA: Washington, DC, USA, 1980. [Google Scholar]
- Crawley, E.; Hall, K. Optimization and mechanisms of mistuning in cascades. J. Eng. Gas Turbines Power 1985, 107, 418–426. [Google Scholar] [CrossRef]
- Groth, P.; Mårtensson, H.; Andersson, C. Design and experimental verification of mistuning of a supersonic turbine blisk. J. Turbomach. 2010, 132, 011010. [Google Scholar] [CrossRef]
- Biagiotti, S.; Pinelli, L.; Poli, F.; Vanti, F.; Pacciani, R. Numerical Study of Flutter Stabilization in Low Pressure Turbine Rotor with Intentional Mistuning. Energy Procedia 2018, 148, 98–105. [Google Scholar]
- Bleeg, J.M.; Yang, M.T.; Eley, J.A. Aeroelastic Analysis of Rotors With Flexible Disks and Alternate Blade Mistuning. J. Turbomach. 2008, 131, 011011. [Google Scholar] [CrossRef]
- Martel, C.; Corral, R.; Llorens, J.M. Stability increase of aerodynamically unstable rotors using intentional mistuning. J. Turbomach. 2008, 130, 011006. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y. Mistuning Effects on Aero-elastic Stability of Contra-Rotating Turbine Blades. Int. J. Aeronaut. Space Sci. 2019, 20, 100–113. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, Y. Aeroelastic Analysis of a Transonic Fan Blade with Low Hub-to-Tip Ratio including Mistuning Effects. J. Power Energy Eng. 2015, 3, 362. [Google Scholar] [CrossRef]
- Figaschewsky, F.; Kühhorn, A.; Beirow, B.; Nipkau, J.; Giersch, T. Design and Analysis of an Intentional Mistuning Experiment Reducing Flutter Susceptibility and Minimizing Forced Response of a Jet Engine Fan. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, Charlotte, NC, USA, 26–60 June 2017; pp. 1–13. [Google Scholar]
- Corral, R.; Khemiri, O.; Martel, C. Design of mistuning patterns to control the vibration amplitude of unstable rotor blades. Aerosp. Sci. Technol. 2018, 80, 20–28. [Google Scholar] [CrossRef]
- Hagood, N.; von Flotow, A. Damping of structural vibrations with piezoelectric materials and passive electrical networks. J. Sound Vib. 1991, 146, 243–268. [Google Scholar] [CrossRef]
- Padula, S.; Kincaid, R. Optimization Strategies for Sensor and Actuator Placement; NASA: Washington, DC, USA, 1999. [Google Scholar]
- Frecker, M.I. Recent Advances in Optimization of Smart Structures and Actuators. J. Intell. Mater. Syst. Struct. 2003, 14, 207–216. [Google Scholar] [CrossRef]
- Ducarne, J.; Thomas, O.; Deü, J.F. Placement and dimension optimization of shunted piezoelectric patches for vibration reduction. J. Sound Vib. 2012, 331, 3286–3303. [Google Scholar] [CrossRef]
- Donoso, A.; Bellido, J.C. Tailoring distributed modal sensors for in-plane modal filtering. Smart Mater. Struct. 2009, 18, 037002. [Google Scholar] [CrossRef]
- Kang, Z.; Wang, X. Topology optimization of bending actuators with multilayer piezoelectric material. Smart Mater. Struct. 2010, 19, 075018. [Google Scholar] [CrossRef]
- Lee, S.; Youn, B.D. A design and experimental verification methodology for an energy harvester skin structure. Smart Mater. Struct. 2011, 20, 057001. [Google Scholar] [CrossRef]
- Sun, H.; Yang, Z.; Li, K.; Li, B.; Xie, J.; Wu, D.; Zhang, L. Vibration suppression of a hard disk driver actuator arm using piezoelectric shunt damping with a topology-optimized PZT transducer. Smart Mater. Struct. 2009, 18, 065010. [Google Scholar] [CrossRef]
- Belloli, A.; Ermanni, P. Optimum placement of piezoelectric ceramic modules for vibration suppression of highly constrained structures. Smart Mater. Struct. 2007, 16, 1662–1671. [Google Scholar] [CrossRef]
- Aurélien, S.; Thomas, O.; Deü, J.F. Optimization of Shunted Piezoelectric Patches for Vibration Reduction of Complex Structures: Application to a Turbojet Fan Blade. In Proceedings of the 22nd International Conference on Design Theory and Methodology, Special Conference on Mechanical Vibration and Noise. Montréal, QC, Canada, 2010, 15–18 August 2010; ASME: Washington, DC, USA, 2010; Volume 5, pp. 695–704. [Google Scholar] [CrossRef] [Green Version]
- Pereira da Silva, L.; Larbi, W.; Deü, J.F. Topology optimization of shunted piezoelectric elements for structural vibration reduction. J. Intell. Mater. Syst. Struct. 2015, 26, 1219–1235. [Google Scholar] [CrossRef]
- Li, L.; Yu, X.; Wang, P. Research on aerodynamic damping of bladed disk with random mistuning. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, Charlotte, NC, USA, 26–30 June 2017; p. V07BT36A010. [Google Scholar] [CrossRef]
- Hsu, K.; Hoyniak, D. A Fast Influence Coefficient Method for Linearized Flutter and Forced-Response Analysis. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011; p. 229. [Google Scholar]
- Hanamura, Y.; Tanaka, H.; Yamaguchi, K. A Simplified Method to Measure Unsteady Forces Acting on the Vibrating Blades in Cascade. JSME Int. J. 2008, 23, 880–887. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Li, L.; Fan, Y.; Deng, P. Improving the aero-elastic stability of bladed disks through parallel piezoelectric network. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018; p. 4738. [Google Scholar]
- Trindade, M.; Benjeddou, A. Effective Electromechanical Coupling Coefficients of Piezoelectric Adaptive Structures: Critical Evaluation and Optimization. Mech. Adv. Mater. Struct. 2009, 16, 210–223. [Google Scholar] [CrossRef]
- Ducarne, J.; Deü, J.F. Structural Vibration Reduction by Switch Shunting of Piezoelectric Elements: Modeling and Optimization. J. Intell. Mater. Syst. Struct. 2010, 21, 797–816. [Google Scholar] [CrossRef]
- Thomas, O.; Ducarne, J.; Deü, J.-F. Performance of piezoelectric shunts for vibration reduction. Smart Mater. Struct. 2011, 21, 015008. [Google Scholar] [CrossRef] [Green Version]
- Chan, Y.J.; Ewins, D. Management of the variability of vibration response levels in mistuned bladed discs using robust design concepts. Part 2. Mech. Syst. Signal Process. 2010, 24, 2792–2806. [Google Scholar] [CrossRef]
- Chan, Y.J.; Ewins, D. Management of the variability of vibration response levels in mistuned bladed discs using robust design concepts. Part 1. Mech. Syst. Signal Process. 2010, 24, 2777–2791. [Google Scholar] [CrossRef]
- Min, J.B.; Duffy, K.P.; Choi, B.B.; Provenza, A.J.; Kray, N. Numerical modeling methodology and experimental study for piezoelectric vibration damping control of rotating composite fan blades. Comput. Struct. 2013, 128, 230–242. [Google Scholar] [CrossRef]
- Bachmann, F.; De Oliveira, R.; Sigg, A.; Schnyder, V.; Delpero, T.; Jaehne, R.; Bergamini, A.; Michaud, V.; Ermanni, P. Passive damping of composite blades using embedded piezoelectric modules or shape memory alloy wires: A comparative study. Smart Mater. Struct. 2012, 21, 075027. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Fan, Y.; Li, L.; Yu, X. Improving Aeroelastic Stability of Bladed Disks with Topologically Optimized Piezoelectric Materials and Intentionally Mistuned Shunt Capacitance. Materials 2022, 15, 1309. https://doi.org/10.3390/ma15041309
Liu X, Fan Y, Li L, Yu X. Improving Aeroelastic Stability of Bladed Disks with Topologically Optimized Piezoelectric Materials and Intentionally Mistuned Shunt Capacitance. Materials. 2022; 15(4):1309. https://doi.org/10.3390/ma15041309
Chicago/Turabian StyleLiu, Xin, Yu Fan, Lin Li, and Xiaoping Yu. 2022. "Improving Aeroelastic Stability of Bladed Disks with Topologically Optimized Piezoelectric Materials and Intentionally Mistuned Shunt Capacitance" Materials 15, no. 4: 1309. https://doi.org/10.3390/ma15041309
APA StyleLiu, X., Fan, Y., Li, L., & Yu, X. (2022). Improving Aeroelastic Stability of Bladed Disks with Topologically Optimized Piezoelectric Materials and Intentionally Mistuned Shunt Capacitance. Materials, 15(4), 1309. https://doi.org/10.3390/ma15041309