Vehicle Based Laser Range Finding in Crops

Abstract
:
1. Introduction
- Variation of range readings depending on measuring distance and reflection medium under static conditions
- Distribution of the light intensity inside the spot cross section
- Measuring properties for multiple reflection levels inside of the beam
- Measuring properties for variable velocities of target medium and measuring distances
- Measurements under same conditions in a real crop
2. Material and Methods
2.1. Variation of range readings depending on measuring distance and reflection medium under static conditions
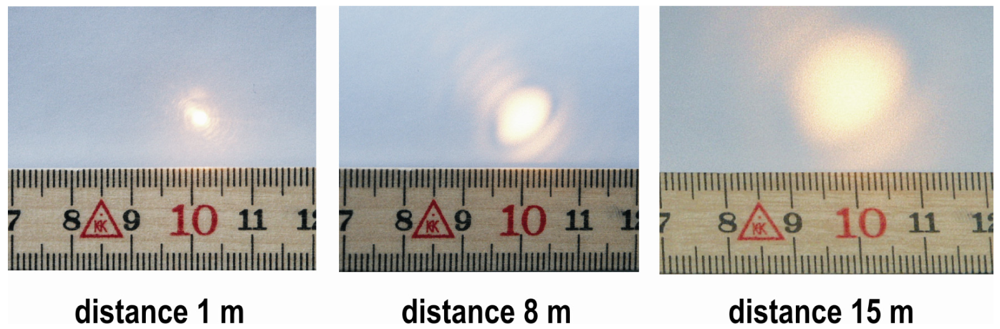
2.2. Distribution of light intensity inside the spot cross section
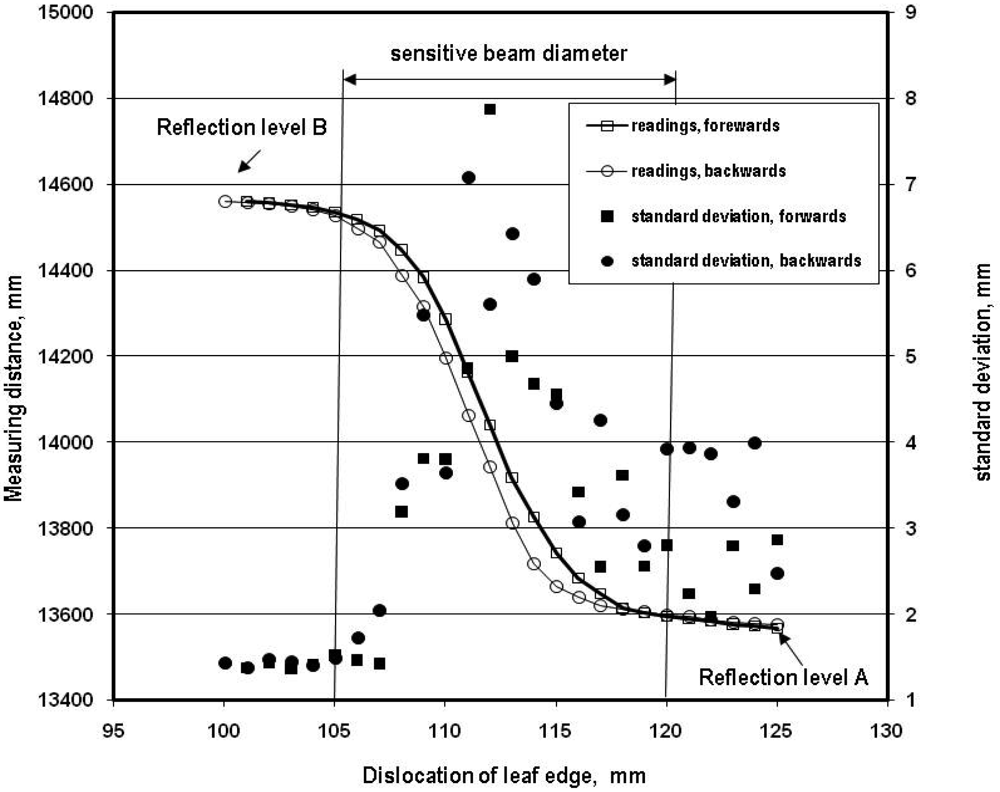
2.3. Measuring properties for multiple reflection levels inside of the beam
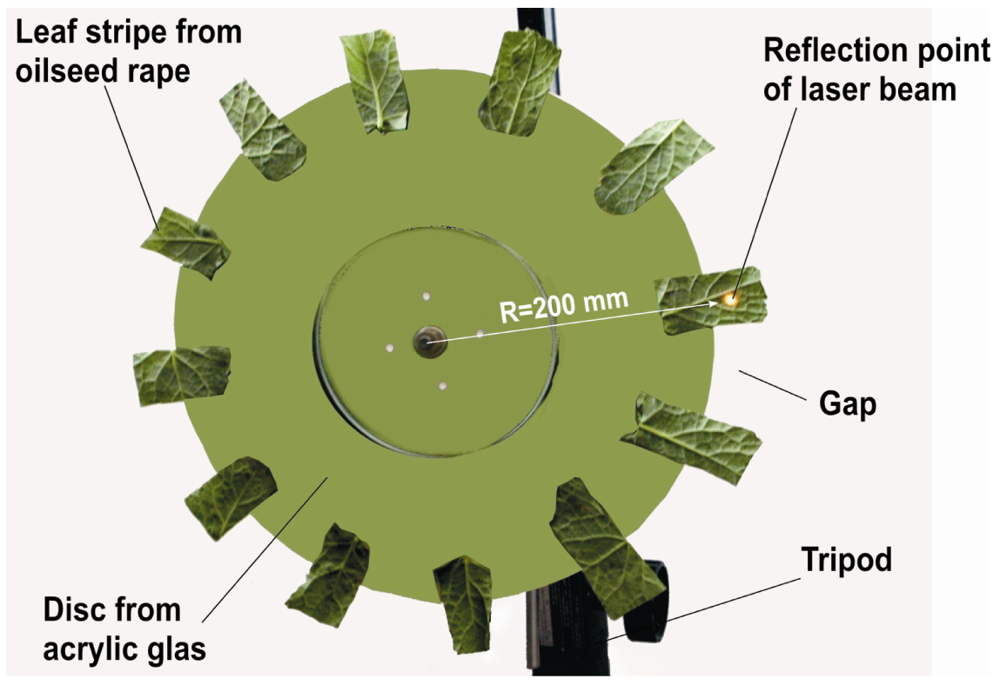
2.4. Measuring properties for variable velocities of target medium and measuring distances
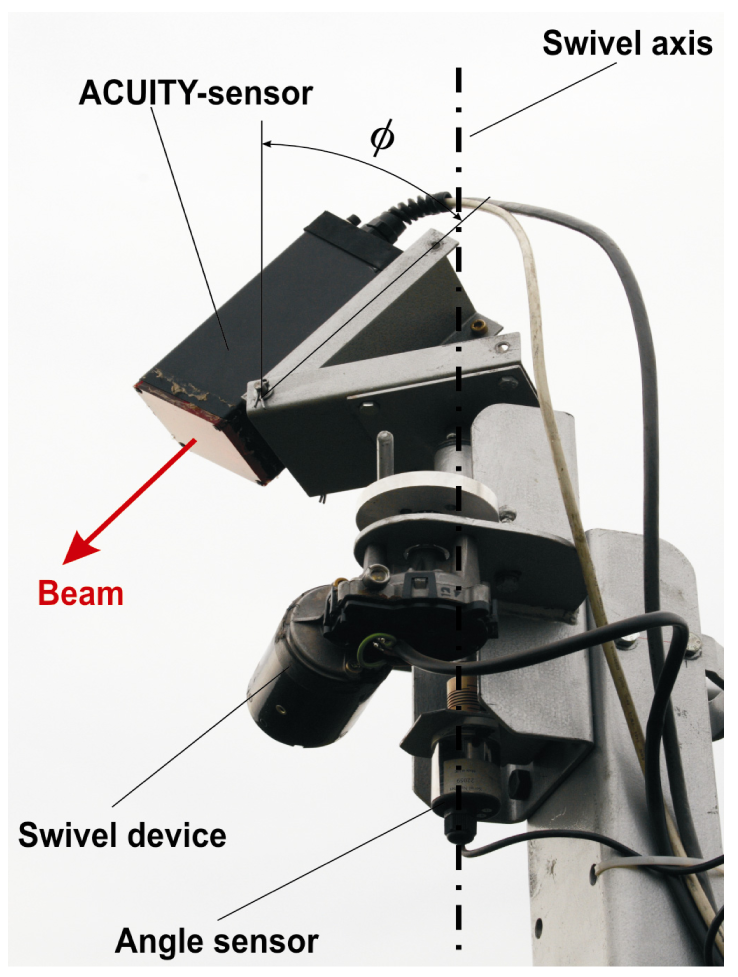
2.5. Measurements under same conditions in a real crop
3. Results and Discussion
3.1. Static accuracy
3.2. Distribution of light intensity inside the beam cross section
3.3. Multiple reflection levels inside of the beam
3.4. Dynamic measurements
3.5. Tests under field conditions
4. Conclusions
References
- Sigrimis, N.; Hashimoto, Y.; Munack, A.; De Baerdemaeker, J. Prospects in Agricultural Engineering in the Information Age - Technological Developments for the Producer and Consumer. Agricultural Engineering International: the CIGR Journal of Scientific Research and Development. 1999, Vol. 1. [Google Scholar]
- Ehlert, D.; Adamek, R.; Horn, H-J. Assessment of laser rangefinder principles for measuring crop biomass. Precision Agriculture '07: Proceedings of the 6th European Conference on Precision Agriculture, Wageningen, The Netherlands; Stafford, J.V., Ed.; 2007; pp. 317–324. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: existing systems and firms and other resources. ISPRS J. Photogramm. 1999, 54, 164–198. [Google Scholar]
- Wehr, A.; Lohr, U. Airborne laser scanning – an introduction and overview. ISPRS J. Photogramm. 1999, 54, 68–82. [Google Scholar]
- Blair, J.B.; Rabine, D.L.; Hofton, M.A. The Laser Vegetation Imaging Sensor: a medium-altitude, digitisation-only, airborne laser altimeter for mapping vegetation and topography. ISPRS J. Photogramm. 1999, 54, 115–122. [Google Scholar]
- Wu, S.; Li, J.; Huang, G.H. Deriving vegetation structure in ecological applications from airborne LiDAR data. J. Environ Inform. 2006, 8((2)), 111–115. [Google Scholar]
- Roth, R.B.; Thompson, J. Practical Application of multiple pulse in air (MPIA) LIDAR in large area surveys. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 2008, 37((B1)), 183–188. [Google Scholar]
- Goepfert, J.; Soergel, U.; Brzank, A. Integration of intensity information and echo distribution in the filtering process of LIDAR data in vegetated areas. In Proceedings of the Silve Laser 2008.; Heriot-Watt University: Edinburgh, UK, September 2008. [Google Scholar]
- Matikainen, L.; Hyyppä, J.; Hyyppä, H. Automatic detection of buildings from laser scanner data for map updating. Maas, H.-G., Vosselmann, G., Streilein, A., Eds.; In 3-D reconstruction from airborne laserscanner and InSAR data. Proceedings of the ISPRS working group III/3 workshop.; ISSN 1682-1750Volume XXXIV, Part 3/W13; 2003. [Google Scholar]
- Devereux, B.J.; Amable, G.S.; Liadsky, J.; Crow, P. Small footprint, full waveform LiDAR modelling of canopy 3d structure in complex, semi-natural woodland communities. In Proceedings of the Silve Laser 2008; Heriot-Watt University: Edinburgh, UK, September 2008. [Google Scholar]
- Wang, Y.; Weinacker, H.; Koch, B. A Lidar Point Cloud Based Procedure for Vertical Canopy Structure Analyses and 3D Single Tree Modelling. Sensors 2008, 8, 3938–3951. [Google Scholar]
- Dold, C.; Brenner, C. Analysis of score functions for the automatic registration of terrestrial laser scans. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 2008, 37((B5)), 417–422. [Google Scholar]
- Gräfe, G. High precision kinematic surveying with laser scanners. J. Appl. Geodes. 2007, 1((4)), 185–199. [Google Scholar]
- Bienert, A.; Scheller, S.; Kesane, E.; Mullooly, G.; Mohan, F. Application of terrestrial laser scanners for the determination of forest inventory parameters. The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 2006, 36((5)). [Google Scholar]
- Danson, F.M.; Armitage, R.P.; Bandugula, V.; Ramirez, F.A.; Tate, N.J.; Tansey, K.J.; Tegzes, T. Terrestrial laser scanners to measure forest canopy gap fraction. In Proceedings of the Silve Laser; 2008; Heriot-Watt University: Edinburgh, UK, September 2008.
- Fischer, C. Economic application of the tool laser beam – Better analysing of features [in German: Wirtschaftliche Anwendung des Strahlwerkzeugs Laser - Eigenschaften besser analysieren]. Optolines 2007, 14((2)), 19–22. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: basic relations and formula. ISPRS J. Photogramm. 1999, 54, 199–214. [Google Scholar]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. 2006, 60((2)), 100–112. [Google Scholar]
- Wagner, W.; Ullrich, A.; Melzer, T.; Briese, C.; Kraus, K. From single-pulse to full-waveform airborne laser scanners: Potential and practical challenges. International Society for Photogrammetry and Remote Sensing XXth Congress; Istanbul, Turkey, 2004. 6. Vol XXXV. Part B/3, Commission 3. [Google Scholar]
- Bretar, F.; Chauvea, A.; Mallet, C.; Jutzi, B. Managing full waveform LIDAR data: A challenging task for the forthcoming years. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 2008, 37((B1)), 415–420. [Google Scholar]
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote Sens. 2008, 29((5)), 1433–1452. [Google Scholar]
- Tumbo, S.D.; Salyani, M.; Whitney, J.D.; Wheaton, T.A.; Miller, W.M. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric. 2002, 18, 367–372. [Google Scholar]
- Walklate, P.; Cross, J.; Richardson, G.; Murray, R.; Baker, D. Comparison of different spray volume deposition models using Lidar measurements of apple orchards. Biosyst. Eng. 2002, 82, 253–267. [Google Scholar]
- Sanz, R.; Palacín, J.; Sisó, J.M.; Ribes-Dasi, M.; Masip, J.; Arnó, J.; Liorens, J.; Vallés, J.M.; Rossell, J.R. Advances in the measurement of structural characteristics of plants with a LIDAR scanner. Proceedings of EurAgEng Conference, Leuven, Belgium; 2004; p. 277. [Google Scholar]
- Escola, A.; Camp, F.; Solanelles, F.; Llorens, J.; Planas, S.; Rossell, J.R.; Gràcia, F.; Gill, E. Variable dose rate sprayer prototype for tree crops based on sensor measured characteristics. Precision Agriculture '07: Proceedings of the 6th European Conference on Precision Agriculture, NL; Stafford, J.V., Ed.; 2007; pp. 563–571. [Google Scholar]
- Thösink, G.; Preckwinkel, J.; Linz, A.; Ruckelshausen, A.; Marquering, J. Optoelectronic sensor system for crop density measurement [in German: Optoelektronisches Sensorsystem zur Messung der Pflanzenbestandesdichte]. Landtechnik 2004, 59, 78–79. [Google Scholar]
- Kirk, K.; Thomson, A.; Anderson, H.J. Estimation of canopy structure from laser range measurements and computer vision: A comparative study. Proceedings of International Conference on Agricultural Engineering, Leuven, Belgium; 2004; pp. 420–421. [Google Scholar]
- Ehlert, D.; Horn, H-J.; Adamek, R. Measuring crop biomass density by laser triangulation. Comput. Electron. Agric. 2008, 61, 117–125. [Google Scholar]
- Lenaerts, B.; Craessaerts, G.; De Baerdemaeker, J.; Saeys, W. Crop Stand Density Prediction using LIDAR-Sensors. Proceedings of International Conference on Agricultural Engineering, Hersonissos-Crete, Greece, OP; 2008; 390. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crop cultivar | Growth stages | No. of plots | Regression | R2 |
|---|---|---|---|---|
| Oilseed rape | 51-61 | 8 | 1) hRmean = 0.090 FMD | 0.92 |
| 8 | 2) hRmean = 0.077 FMD | 0.97 | ||
| Winter rye | 31-69 | 13 | 1) hRmean = 0.146 FMD | 0.91 |
| 13 | 2) hRmean = 0.116 FMD | 0.90 | ||
| Winter wheat | 30-59 | 10 | 1) hRmean = 0.091 FMD | 0.94 |
| 10 | 2) hRmean = 0.074 FMD | 0.96 | ||
| Grassland | - | 8 | 1) hRmean = 0.153 FMD | 0.61 |
| 8 | 2) hRmean = 0.099 FMD | 0.48 |
| Measuring range up to | 16.50 m | Divergence | 0.5 mrad |
| Wave length | 780 nm | Laser output | 20 mW |
| Measuring frequency | 50,000 Hz | Classification | 3B |
| Voltage internal | 5 V | Length/ height /width | 160/80/80 mm |
| Power requirement | 1.5 W | Mass | 0.624 kg |
| Laser spot size | 2.5 mm | Price | € 6,900 |
| Linearity | 2.5 mm |
| Measuring range m | White sheet of paper | Leaf of oilseed rape | Sandy soil | ||||
|---|---|---|---|---|---|---|---|
| STDW mm | CV % | STDW mm | CV % | STDW mm | CV % | ||
| Short | 1.00 | 0.53 | 0.053 | 0.48 | 0.048 | 0.82 | 0.082 |
| Medium | 8.00 | 0.53 | 0.007 | 1.27 | 0.016 | 1.09 | 0.014 |
| Far | 14.90 | 1.08 | 0.007 | 2.19 | 0.015 | 1.64 | 0.011 |
| Range | Parameter | Unit | v1 = 1.67 ms-1 | v2 = 3.34 ms-1 | v3 = 6.70 ms-1 |
|---|---|---|---|---|---|
| Short | lA | m | 1.500 | 1.500 | 1.500 |
| lB | m | 2.000 | 2.000 | 2.000 | |
| lcal | m | 1.805 | 1.818 | 1.818 | |
| lm | m | 1.813 | 1.800 | 1.843 | |
| lcal-lm | m | -0.008 | 0.018 | -0.025 | |
| 100 (lcal-lm) lcal-1 | % | -0.46 | 1.00 | -1.38 | |
| Medium 1 | lA | m | 8.000 | 8.000 | 8.000 |
| lB | m | 8.600 | 8.600 | 8.600 | |
| lcal | m | 8.364 | 8.381 | 8.381 | |
| lm | m | 8.368 | 8.414 | 8.426 | |
| lcal-lm | m | -0.004 | -0.033 | -0.045 | |
| 100 (lcal-lm) lcal-1 | % | -0.47 | -0.40 | -0.53 | |
| Medium 2 | lA | m | 8.000 | 8.000 | 8.000 |
| lB | m | 11.000 | 11.000 | 11.000 | |
| lcal | m | 9.860 | 9.905 | 9.905 | |
| lm | m | 9.917 | 9.908 | 9.947 | |
| lcal-lm | m | -0.060 | -0.003 | -0.041 | |
| 100 (lcal-lm) lcal-1 | % | -0.57 | -0.03 | -0.42 | |
| Long | lA | m | 13.500 | 13.500 | 13.500 |
| lB | m | 14.500 | 14.500 | 14.500 | |
| lcal | m | 14.130 | 14.152 | 14.152 | |
| lm | m | 14.170 | 14.173 | 14.194 | |
| lcal-lm | m | -0.041 | -0.021 | -0.041 | |
| 100 (lcal-lm) lcal-1 | % | -0.29 | -0.15 | -0.29 | |
| Inclination angle φ grad | number of scans | mean value m | STDW m | CV % |
|---|---|---|---|---|
| winter wheat, ripe 13.07.2007, sensor height 3.65 m | ||||
| 45 | 43 / 43 | 4.543 /4.564 | 0.0095 / 0.0084 | 0.21 / 0.18 |
| 60 | 60 / 60 | 6.061 / 6.065 | 0.0118 / 0.0116 | 0.19 / 0.19 |
| 75 | 56 / 56 | 10.093 /10.087 | 0.0538 / 0.0512 | 0.53 / 0.51 |
| winter wheat, BBCH 33, 15.5.2008, sensor height 2.75 m | ||||
| 45 | 24 / 22 | 3.214 / 3.188 | 0.0094 / 0.0086 | 0.29 / 0.16 |
| 60 | 25 / 23 | 4.064 / 4.080 | 0.0062 / 0.0086 | 0.15 / 0.21 |
| 75 | 26 / 25 | 7.213 / 7.127 | 0.0067 / 0.0087 | 0.09 / 0.12 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ehlert, D.; Adamek, R.; Horn, H.-J. Vehicle Based Laser Range Finding in Crops. Sensors 2009, 9, 3679-3694. https://doi.org/10.3390/s90503679
Ehlert D, Adamek R, Horn H-J. Vehicle Based Laser Range Finding in Crops. Sensors. 2009; 9(5):3679-3694. https://doi.org/10.3390/s90503679
Chicago/Turabian StyleEhlert, Detlef, Rolf Adamek, and Hans-Juergen Horn. 2009. "Vehicle Based Laser Range Finding in Crops" Sensors 9, no. 5: 3679-3694. https://doi.org/10.3390/s90503679
APA StyleEhlert, D., Adamek, R., & Horn, H.-J. (2009). Vehicle Based Laser Range Finding in Crops. Sensors, 9(5), 3679-3694. https://doi.org/10.3390/s90503679