Deployment of a Prototype Plant GFP Imager at the Arthur Clarke Mars Greenhouse of the Haughton Mars Project

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials, Equipment and Context
2.1. Transgenic Plants
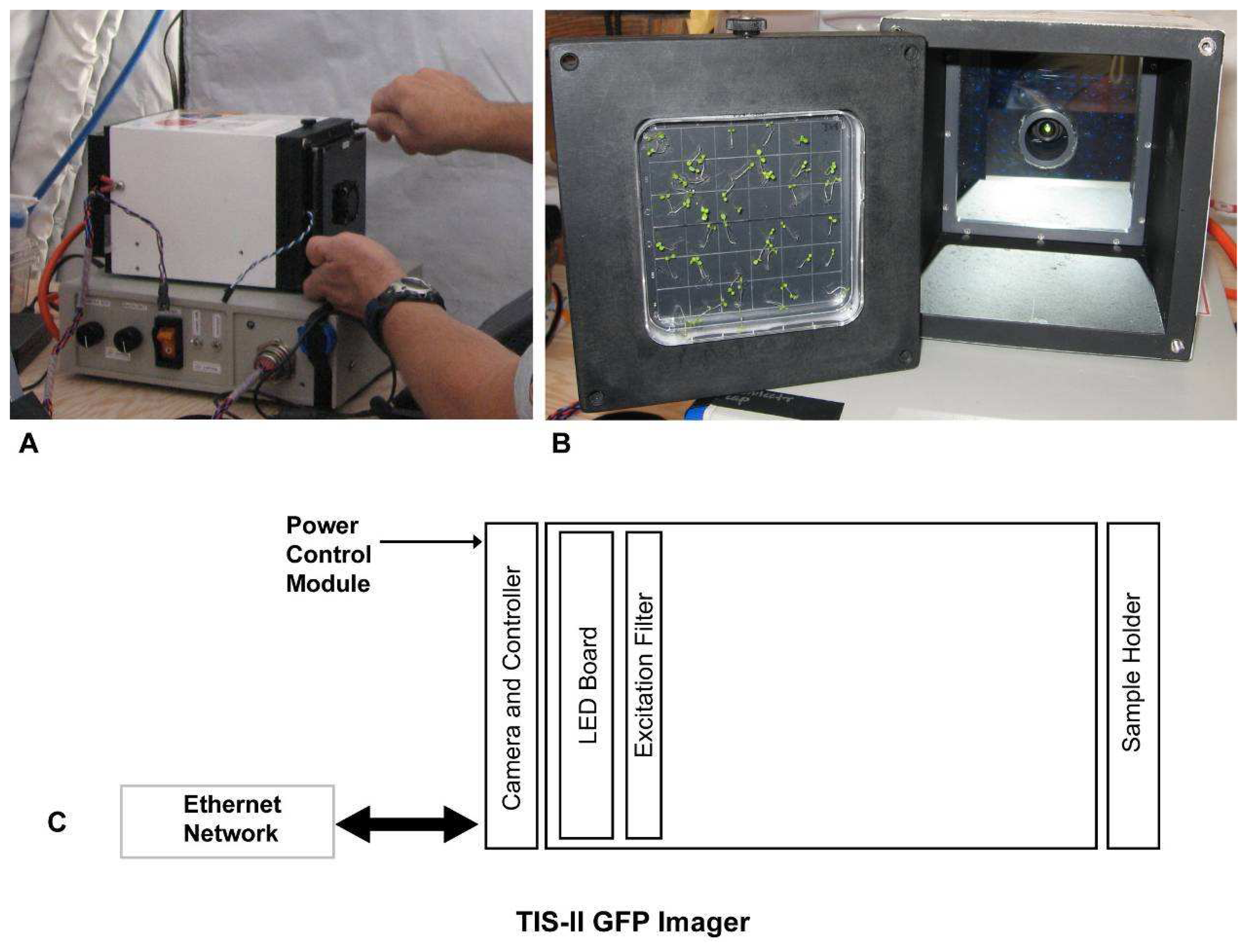
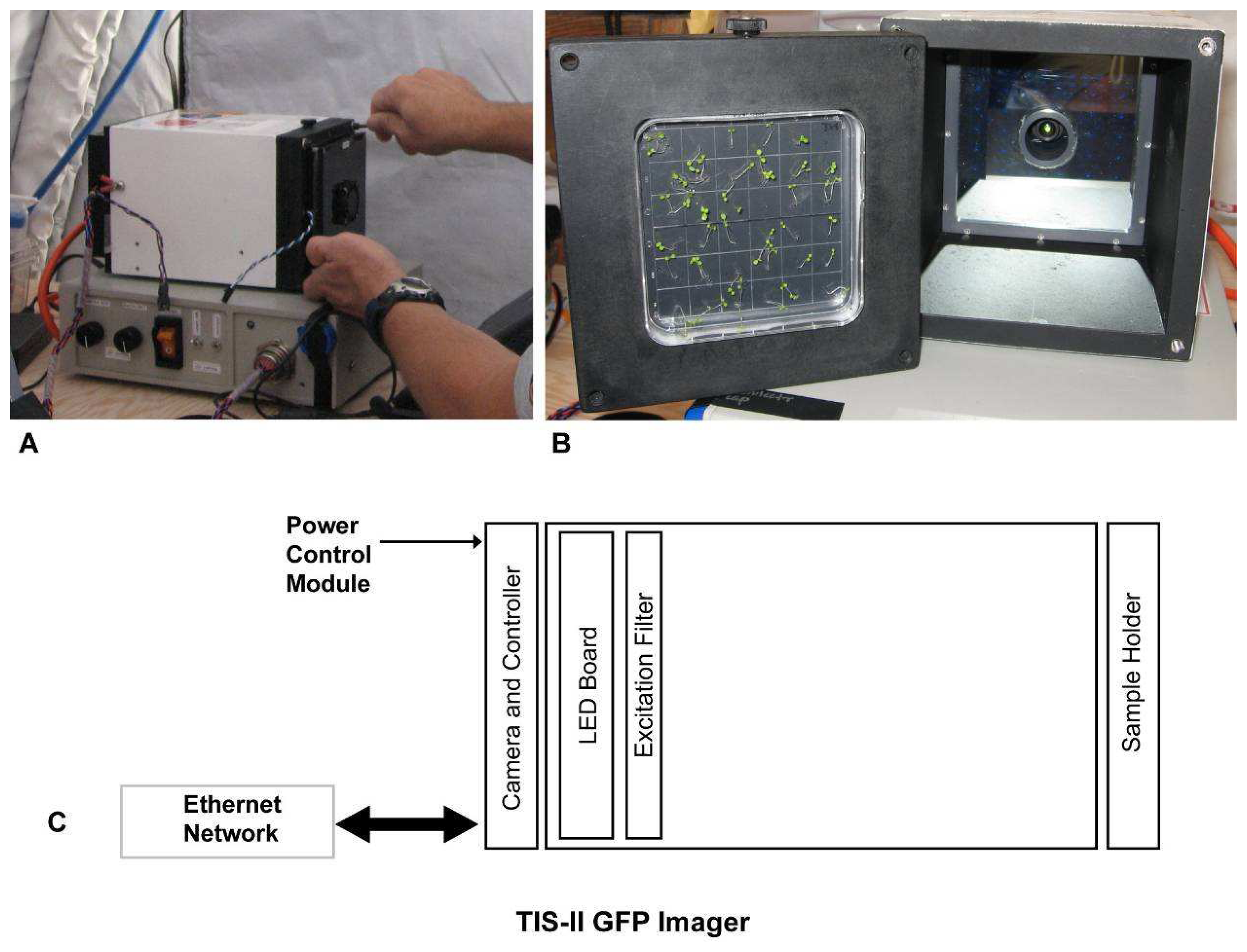
2.2. GFP Imager
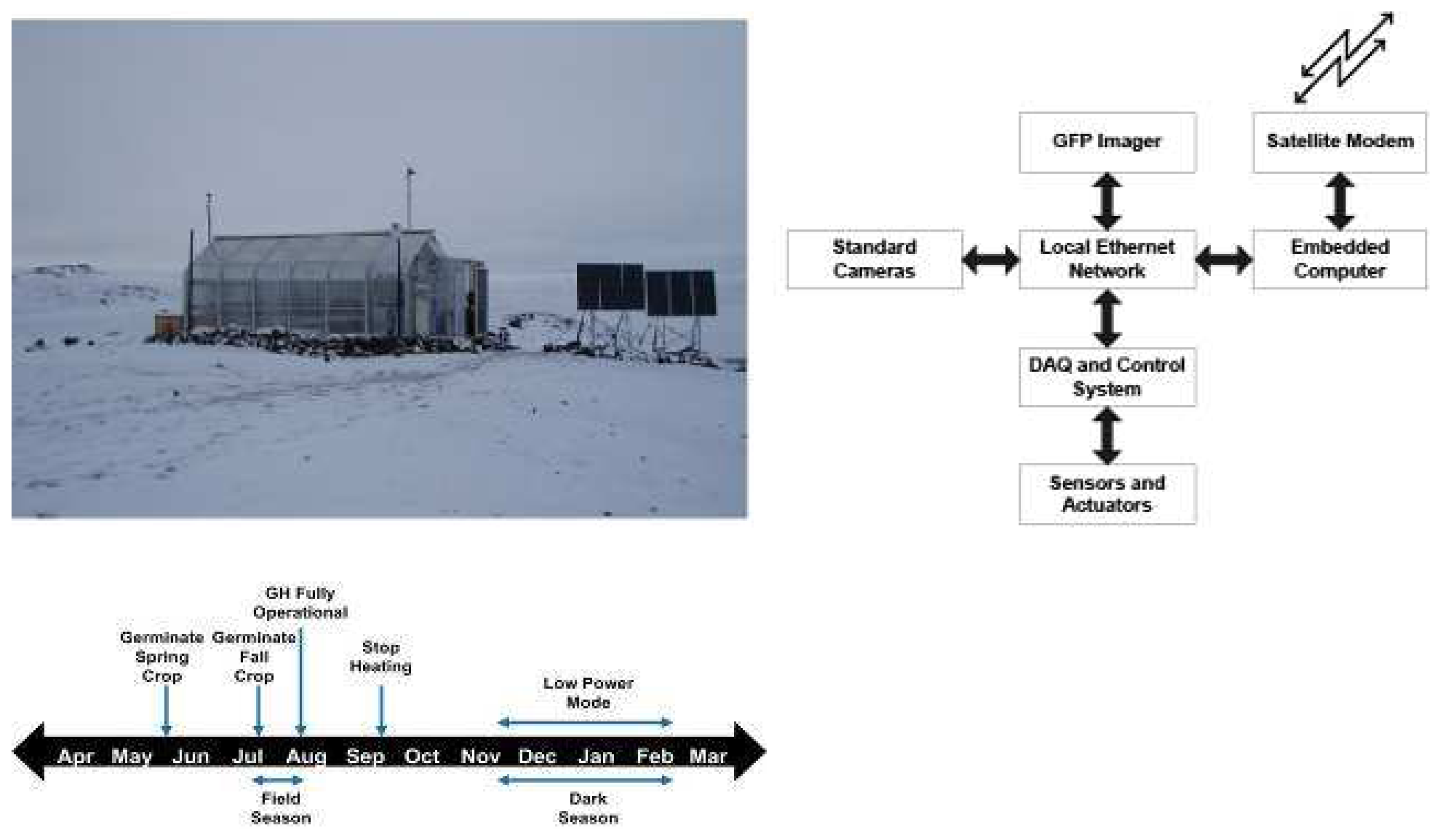
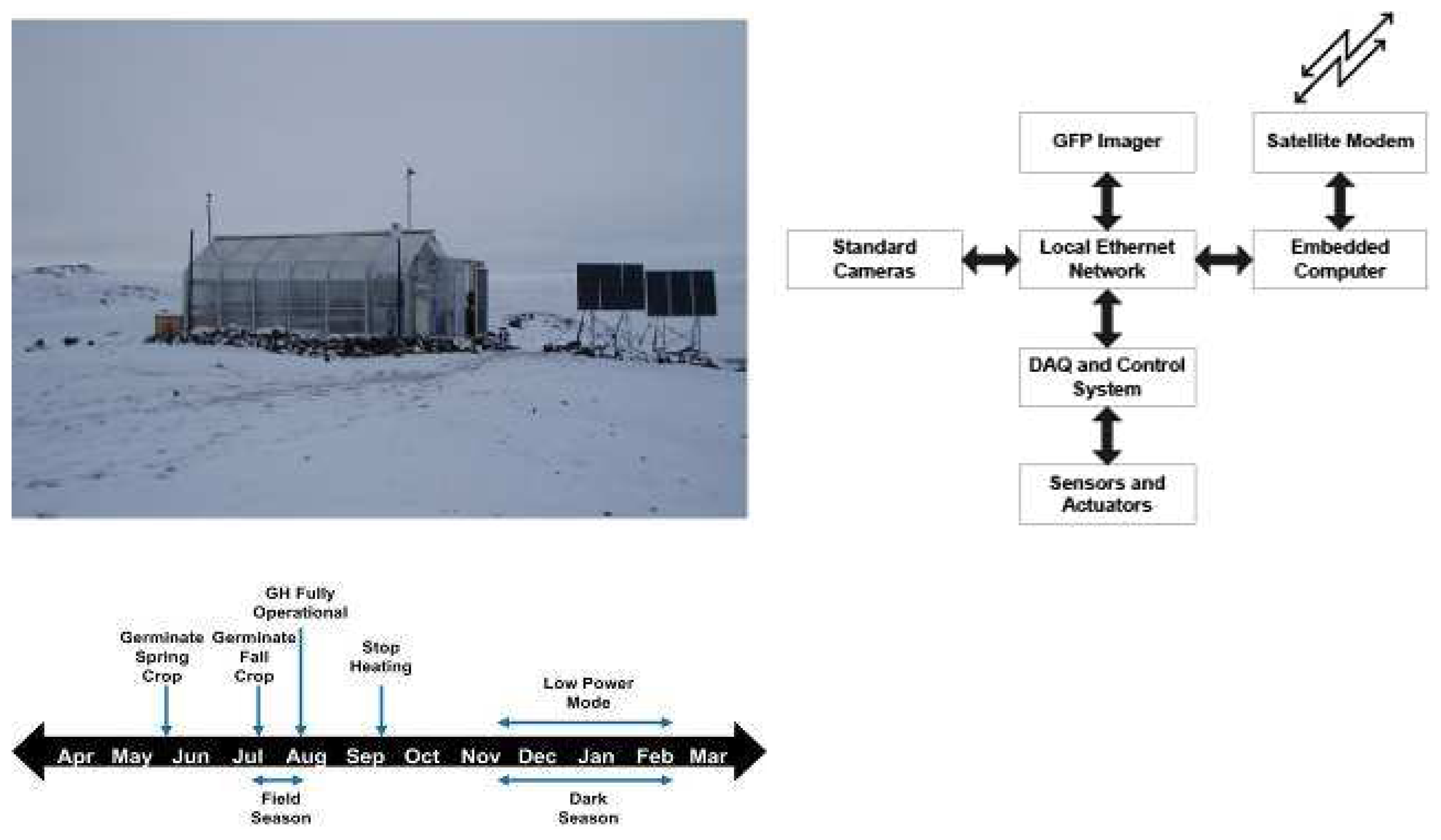
2.3. Arthur Clarke Mars Greenhouse
2.4. Haughton Mars Project on Devon Island
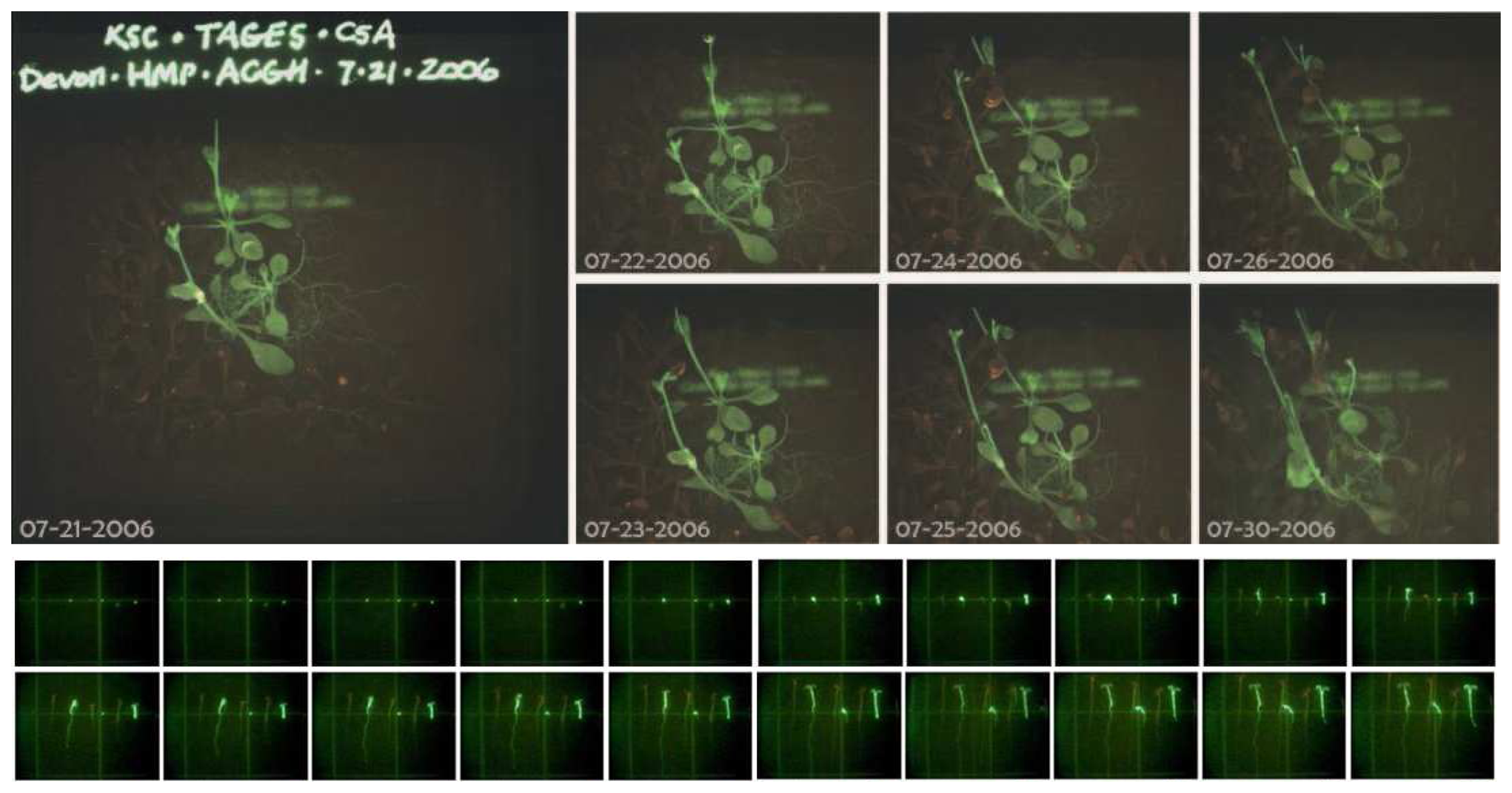
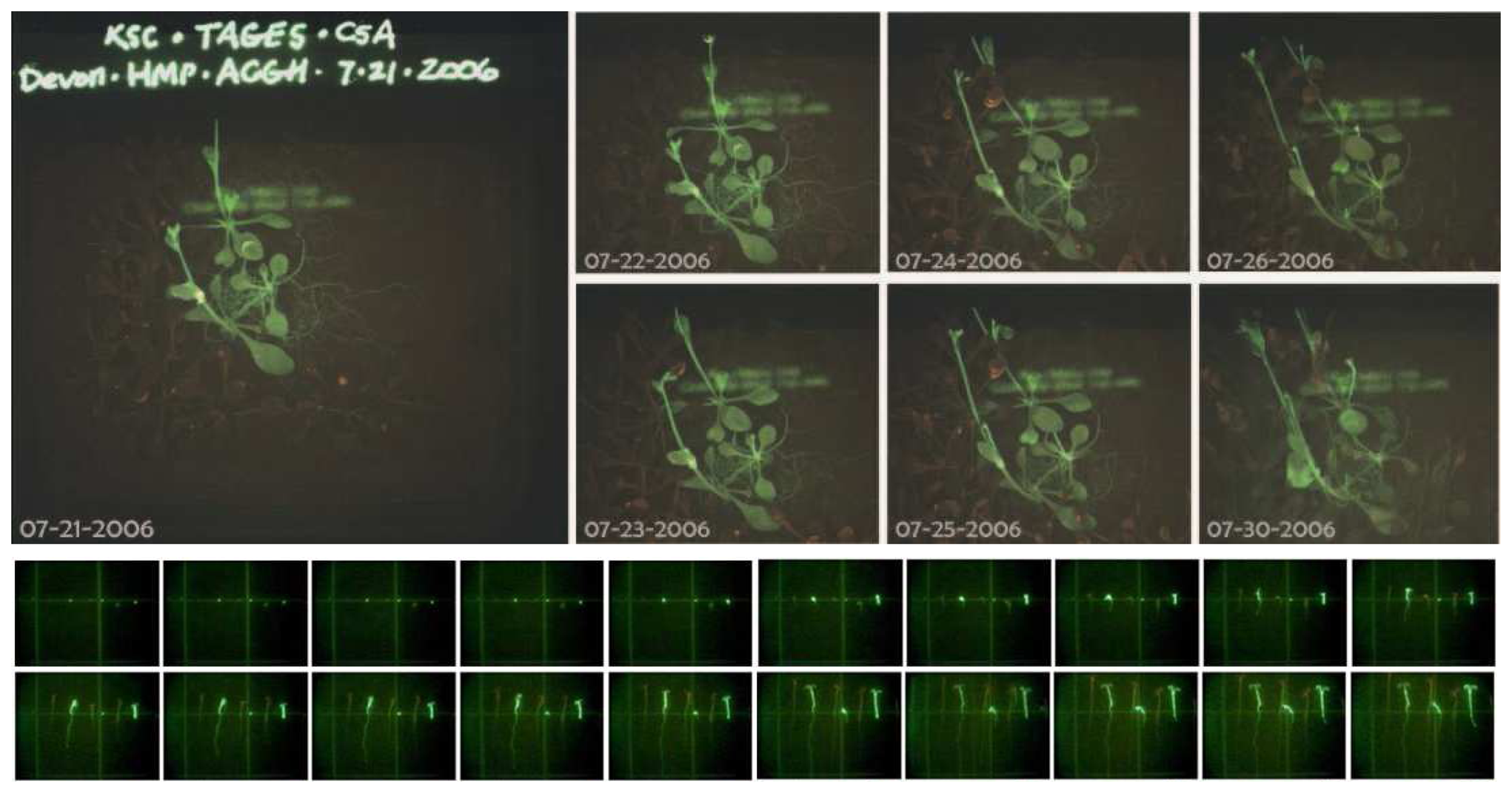
3. Results and Discussion
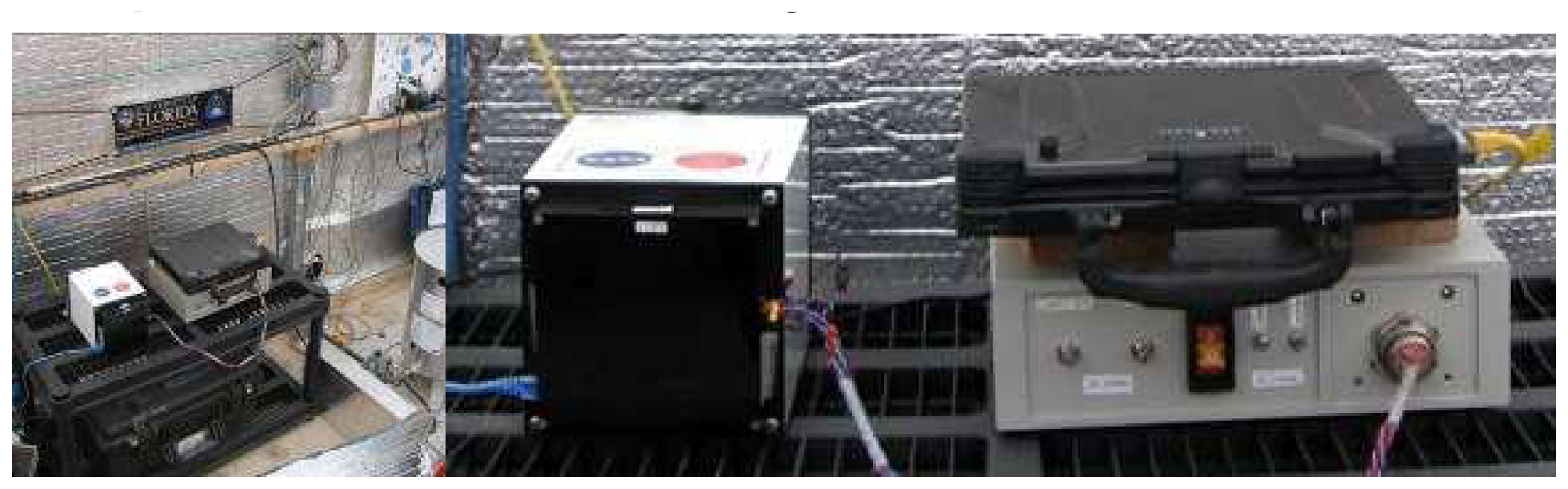
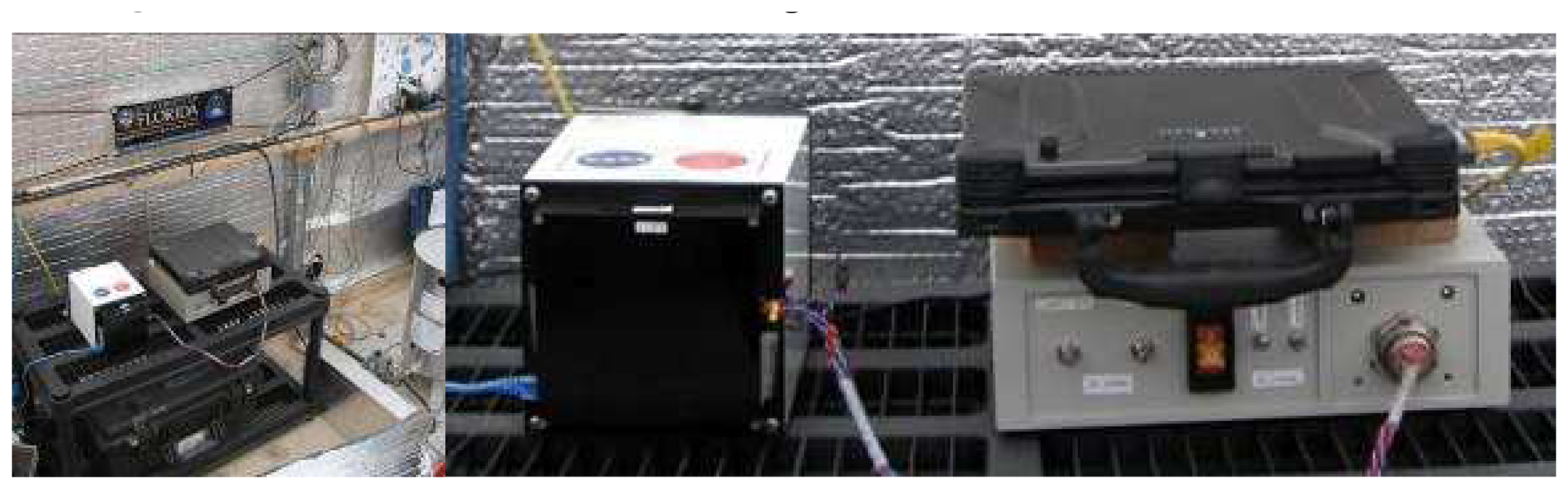
3.1. Installation of the TIS-II GFP Imager into the ACMG
3.1. Telemetric Data Collection
4. Conclusions
Acknowledgments
References and Notes
- Chiu, W.; Niwa, Y.; Zeng, W.; Hirano, T.; Kobayashi, H.; Sheen, J. Engineered GFP as a vital reporter in plants. Curr. Biol. 1996, 6, 325–330. [Google Scholar]
- Manak, M.S.; Paul, A.L.; Sehnke, P.C.; Ferl, R.J. Remote sensing of gene expression in Planta: transgenic plants as monitors of exogenous stress perception in extraterrestrial environments. Life Support Biosph. Sci. 2002, 8, 83–91. [Google Scholar]
- Schaffer, R.; Landgraf, J.; Perez-Amador, M.; Wisman, E. Monitoring genome-wide expression in plants. Curr. Opin. Biotechnol. 2000, 11, 162–167. [Google Scholar]
- Seki, M.; Narusaka, M.; Abe, H.; Kasuga, M.; Yamaguchi-Shinozaki, K.; Carninci, P.; Hayashizaki, Y.; Shinozaki, K. Monitoring the expression pattern of 1300 Arabidopsis genes under drought and cold stresses by using a full-length cDNA microarray. Plant Cell 2001, 13, 61–72. [Google Scholar]
- Seki, M.; Narusaka, M.; Ishida, J.; Nanjo, T.; Fujita, M.; Oono, Y.; Kamiya, A.; Nakajima, M.; Enju, A.; Sakurai, T.; Satou, M.; Akiyama, K.; Taji, T.; Yamaguchi-Shinoza…, K.; Carninci, P.; Kawai, J.; Hayashizaki, Y.; Shinozaki, K. Monitoring the expression profiles of 7000 Arabidopsis genes under drought, cold and high-salinity stresses using a full-length cDNA microarray. Plant J 2002, 31, 279–292. [Google Scholar]
- Klok, E.J.; Wilson, I.W.; Wilson, D.; Chapman, S.C.; Ewing, R.M.; Somerville, S.C.; Peacock, W.J.; Dolferus, R.; Dennis, E.S. Expression profile analysis of the low-oxygen response in Arabidopsis root cultures. Plant Cell 2002, 14, 2481–2494. [Google Scholar]
- Ozturk, Z.N.; Talame, V.; Deyholos, M.; Michalowski, C.B.; Galbraith, D.W.; Gozukirmizi, N.; Tuberosa, R.; Bohnert, H.J. Monitoring large-scale changes in transcript abundance in drought- and salt-stressed barley. Plant Mol Biol 2002, 48, 551–573. [Google Scholar]
- Paul, A.-L.; Schuerger, A.C.; Popp, M.P.; Richards, J.T.; Manak, M.S.; Ferl, R.J. Hypobaric biology: Arabidopsis gene expression at low atmospheric pressure. Plant Physiol 2004, 134, 215–223. [Google Scholar]
- Salisbury, F.B. Growing crops for space explorers on the moon, Mars, or in space. Adv Space Biol Med 1999, 7, 131–162. [Google Scholar]
- Ferl, R.; Wheeler, R.; Levine, H.G.; Paul, A.-L. Plants in space. Curr Opin Plant Biol 2002, 5, 258–263. [Google Scholar]
- Paul, A.-L.; Daugherty, C.J.; Bihn, E.A.; Chapman, D.K.; Norwood, K.L.; Ferl, R.J. Transgene expression patterns indicate that spaceflight affects stress signal perception and transduction in arabidopsis. Plant Physiol 2001, 126, 613–621. [Google Scholar]
- Paul, A.-L.; Ferl, R.J. Molecular aspects of stress-gene regulation during spaceflight. J Plant Growth Regul 2002, 21, 166–176. [Google Scholar]
- Paul, A.-L.; Murdoch, T.; Ferl, E.; Levine, H.G.; Ferl, R. The TAGES Imaging System: Optimizing a green fluorescent protein imaging system for plants. SAE Technical Paper 2003, 2003-01-2477. [Google Scholar]
- Prasher, D.C.; Eckenrode, V.K.; Ward, W.W.; Prendergast, F.G.; Cormier, M.J. Primary structure of the Aequorea victoria green-fluorescent protein. Gene 1992, 111, 229–233. [Google Scholar]
- Ormo, M.; Cubitt, A.B.; Kallio, K.; Gross, L.A.; Tsien, R.Y.; Remington, S.J. Crystal structure of the Aequorea victoria green fluorescent protein. Science 1996, 273, 1392–1395. [Google Scholar]
- Heim, R.; Cubitt, A.B.; Tsien, R.Y. Improved green fluorescence. Nature 1995, 373, 663–664. [Google Scholar]
- Sheen, J.; Hwang, S.; Niwa, Y.; Kobayashi, H.; Galbraith, D.W. Green-fluorescent protein as a new vital marker in plant cells. Plant J 1995, 8, 777–784. [Google Scholar]
- Haseloff, J.; Amos, B. GFP in plants. Trends Genet 1995, 11, 328–329. [Google Scholar]
- Hutter, H. Fluorescent reporter methods. In Methods in molecular biology; Clifton, N.J, 2006; Volume 351, pp. 155–173. [Google Scholar]
- Paul, A.-L.; Ferl, R.J. Plant biology in low atmospheric pressure - Implications for exploration mission design and advanced life support. Gravitational and Space Biology 2006, 19, 3–17. [Google Scholar]
- Paul, A.-L.; Popp, M.P.; Gurley, W.B.; Guy, C.; Norwood, K.L.; Ferl, R. Arabidopsis gene expression patterns are altered during spaceflight. J Adv Space Res 2005, 36, 1175–1181. [Google Scholar]
- Lasseur, C.; Paillé, C.; Lamaze, B.; Rebeyre, P.; Rodriguez, A.; Ordonez, L.; Marty, F. MELISSA: overview of the project and perspective. Proceedings of the 35th International Conference on Environmental Systems. SAE Technical paper 2005, 2005-01–3066. [Google Scholar]
- Giroux, R.; Berinstain, A.; Braham, S.; Graham, T.; Bamsey, M.; Boyd, K.; Silver, M.; Lussier-Desbiens, A.; Lee, P.; Boucher, M.; Cowing, K.; Dixon, M. Greenhouses in extreme environments: The Arthur Clarke Mars Greenhouse design and operation overview. Advances in Space Research 2006, 38, 1248–1259. [Google Scholar]
- Lee, P. Haughton-Mars Project: preparing for Mars in a unique public/private - and international - setting. Ad Astra 2002. [Google Scholar]
© 2008 by MDPI (http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Paul, A.-L.; Bamsey, M.; Berinstain, A.; Braham, S.; Neron, P.; Murdoch, T.; Graham, T.; Ferl, R.J. Deployment of a Prototype Plant GFP Imager at the Arthur Clarke Mars Greenhouse of the Haughton Mars Project. Sensors 2008, 8, 2762-2773. https://doi.org/10.3390/s8042762
Paul A-L, Bamsey M, Berinstain A, Braham S, Neron P, Murdoch T, Graham T, Ferl RJ. Deployment of a Prototype Plant GFP Imager at the Arthur Clarke Mars Greenhouse of the Haughton Mars Project. Sensors. 2008; 8(4):2762-2773. https://doi.org/10.3390/s8042762
Chicago/Turabian StylePaul, Anna-Lisa, Matthew Bamsey, Alain Berinstain, Stephen Braham, Philip Neron, Trevor Murdoch, Thomas Graham, and Robert J. Ferl. 2008. "Deployment of a Prototype Plant GFP Imager at the Arthur Clarke Mars Greenhouse of the Haughton Mars Project" Sensors 8, no. 4: 2762-2773. https://doi.org/10.3390/s8042762
APA StylePaul, A.-L., Bamsey, M., Berinstain, A., Braham, S., Neron, P., Murdoch, T., Graham, T., & Ferl, R. J. (2008). Deployment of a Prototype Plant GFP Imager at the Arthur Clarke Mars Greenhouse of the Haughton Mars Project. Sensors, 8(4), 2762-2773. https://doi.org/10.3390/s8042762