Implantable Biosensors for Real-time Strain and Pressure Monitoring


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
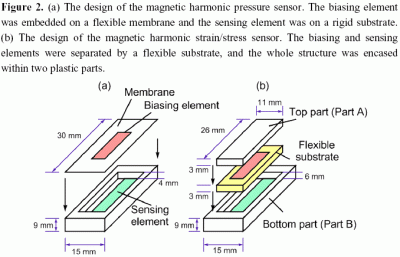
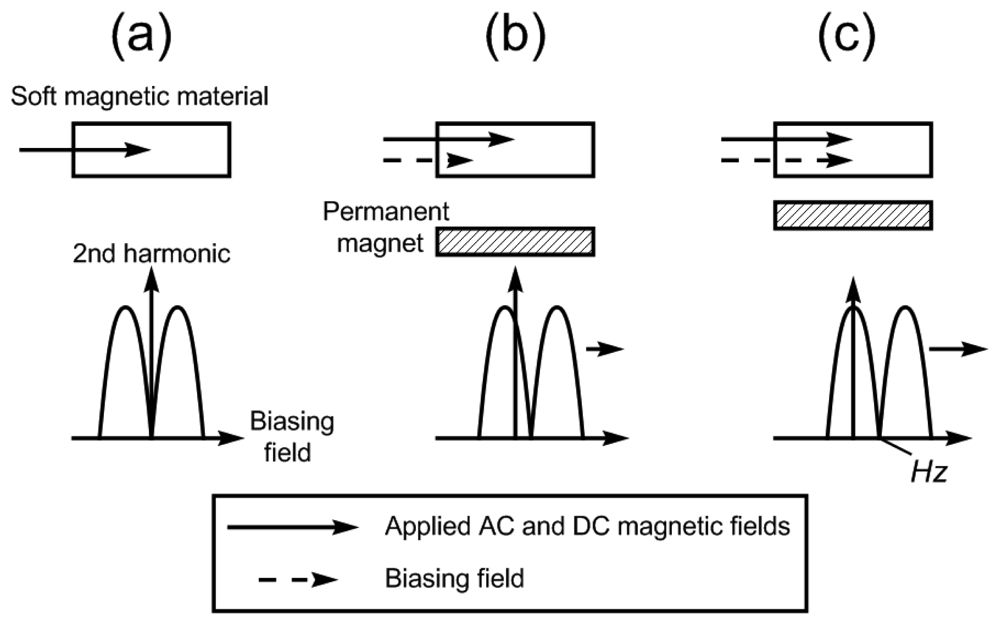
1.1. Operating Principle
2. Experiments
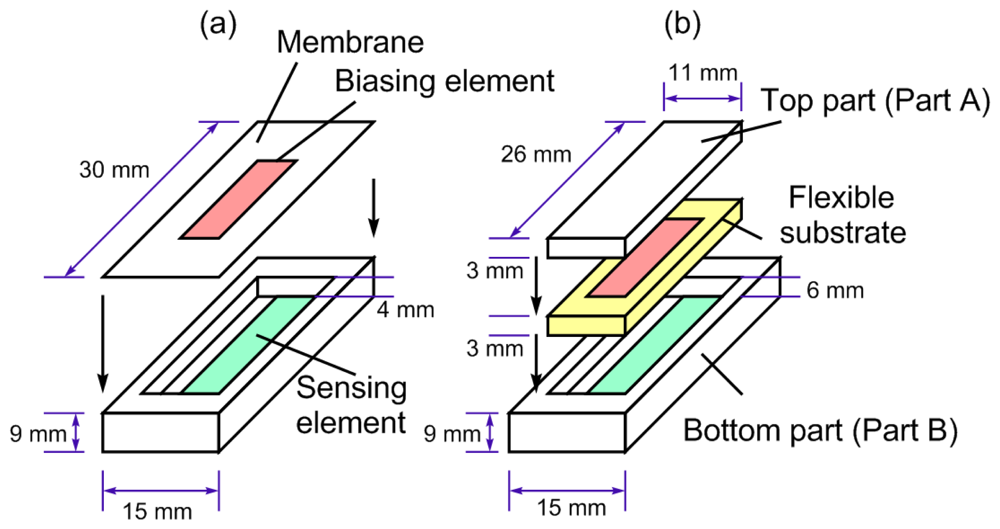
2.1. Fabrication of the Sensing and Biasing Elements
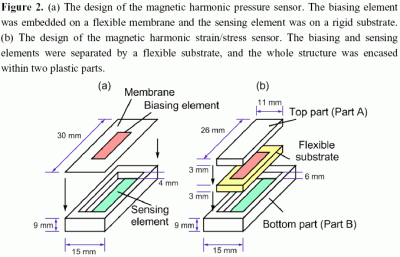
2.2 Pressure Sensor Fabrication
2.3 Strain/stress Sensor Fabrication
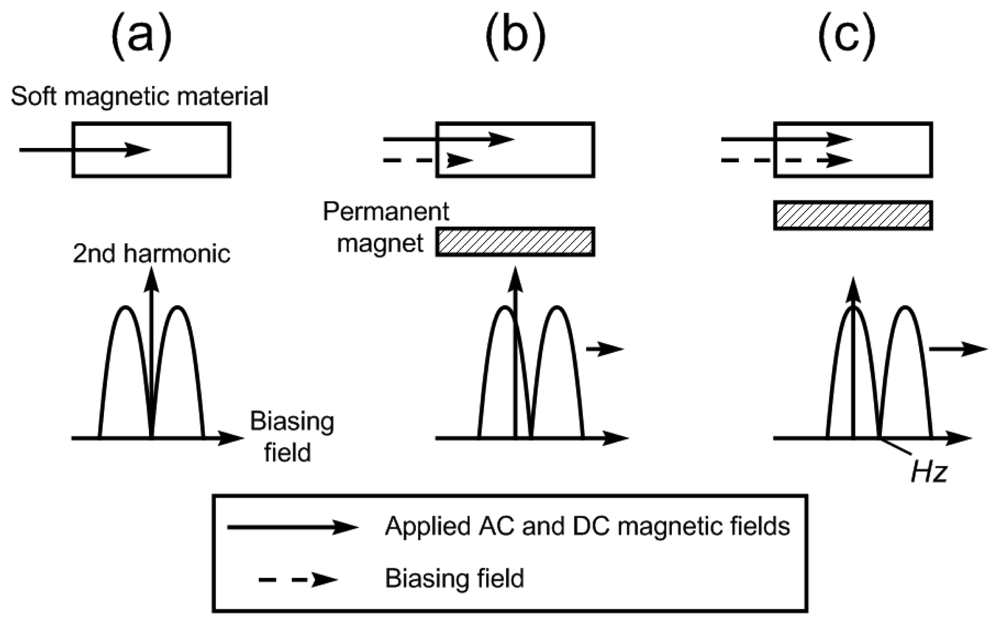
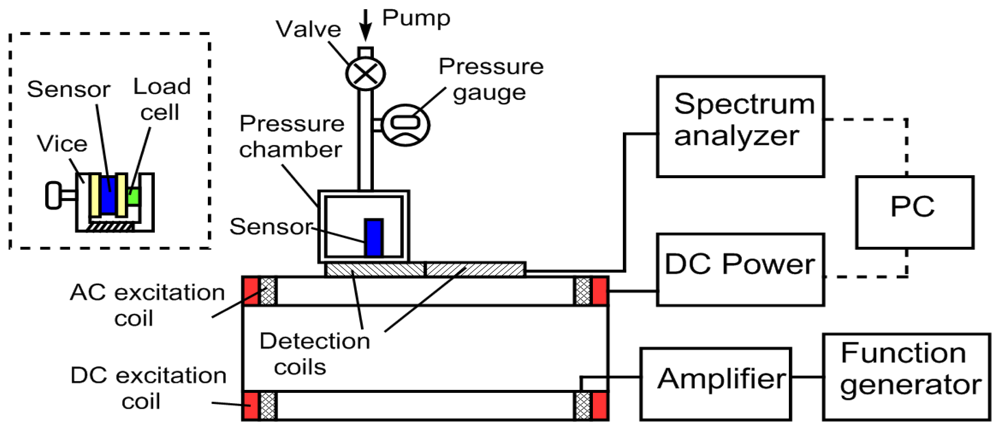
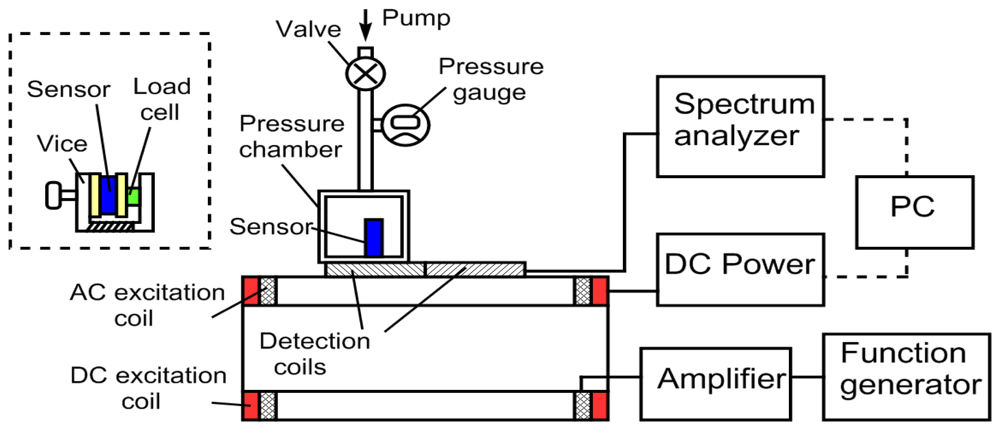
2.4. Experimental Setup
3. Results and Discussions
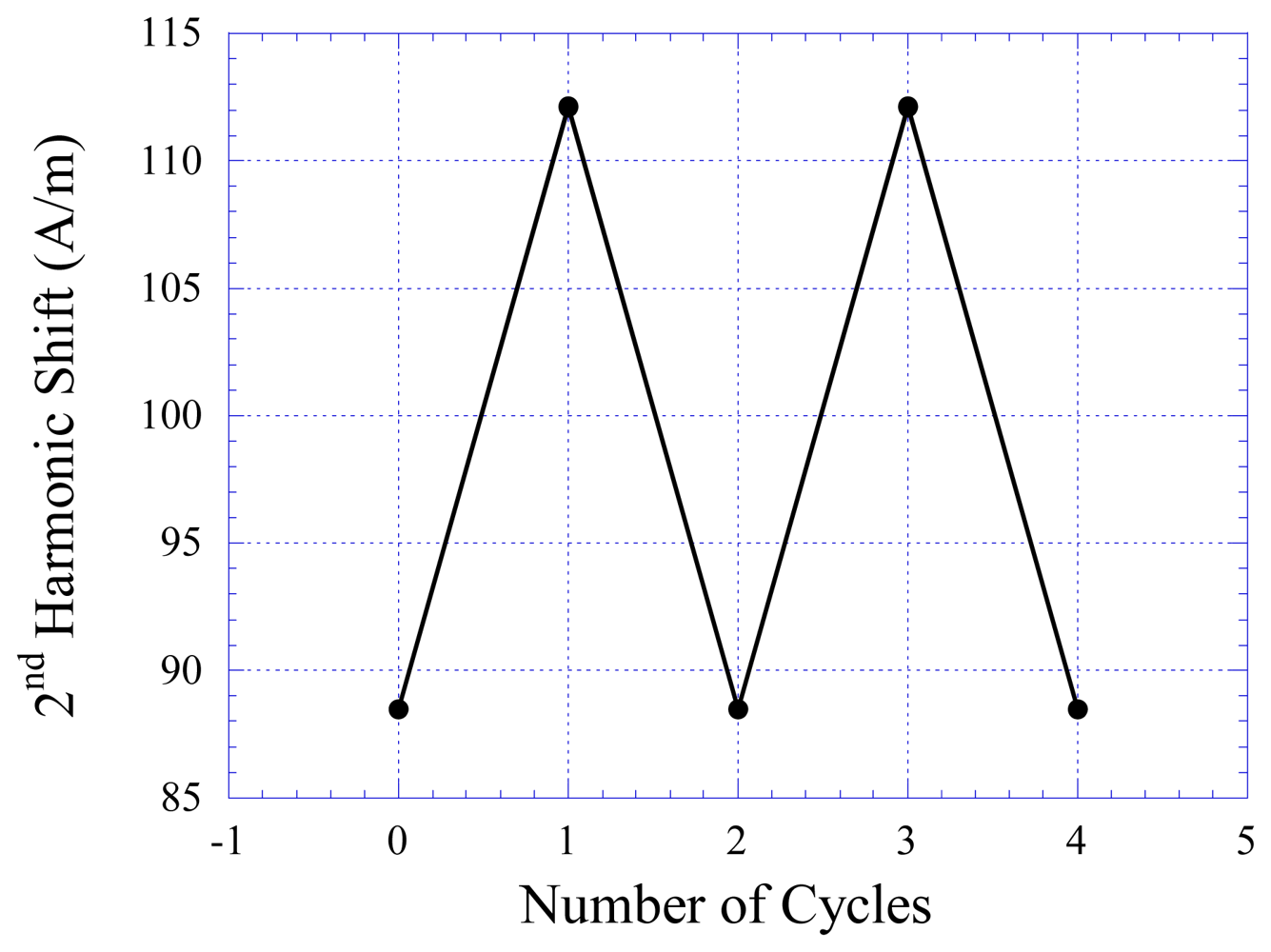
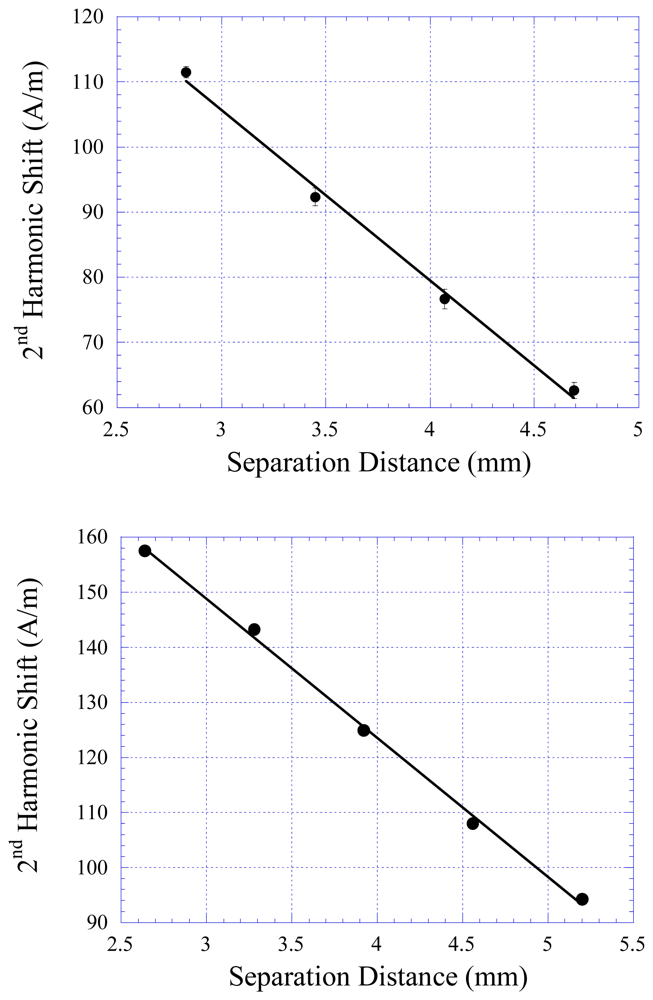
3.1. Sensor Characterization
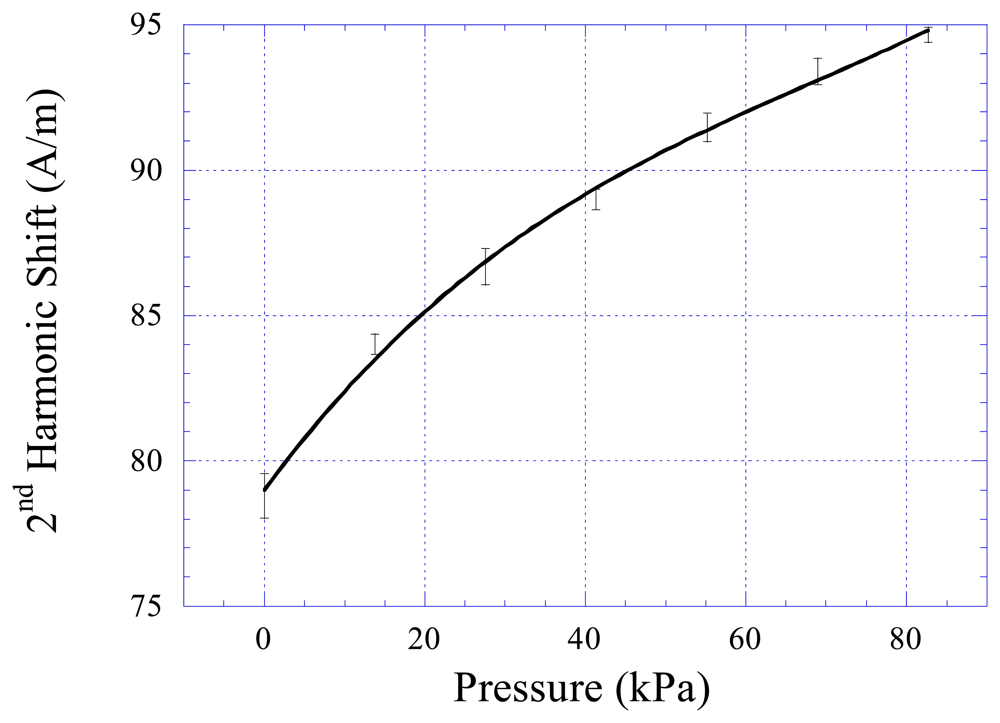
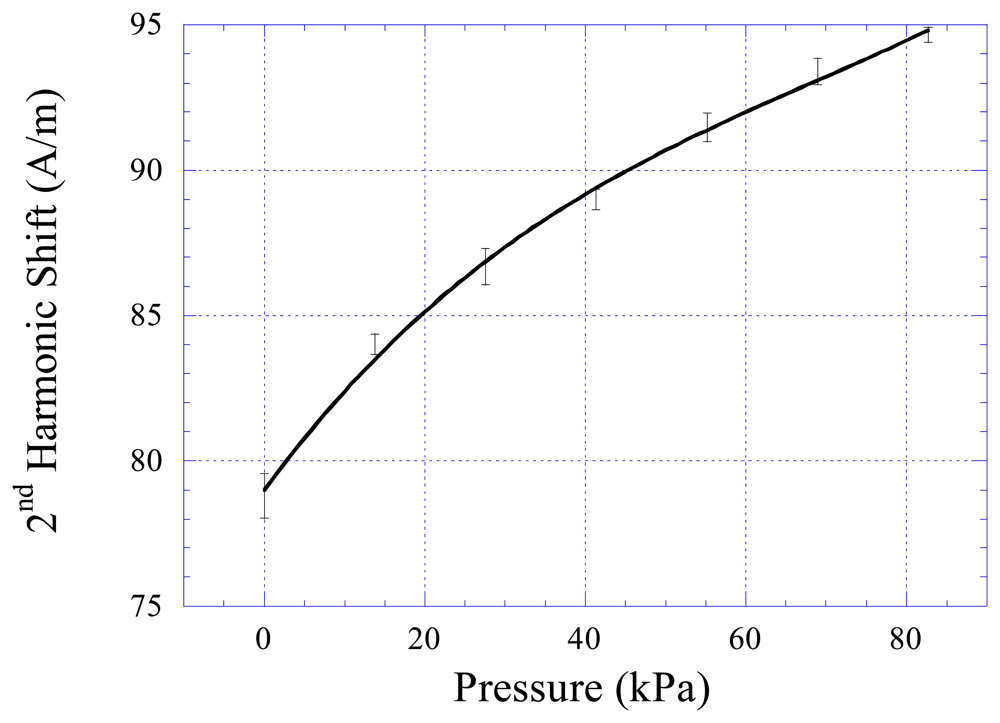
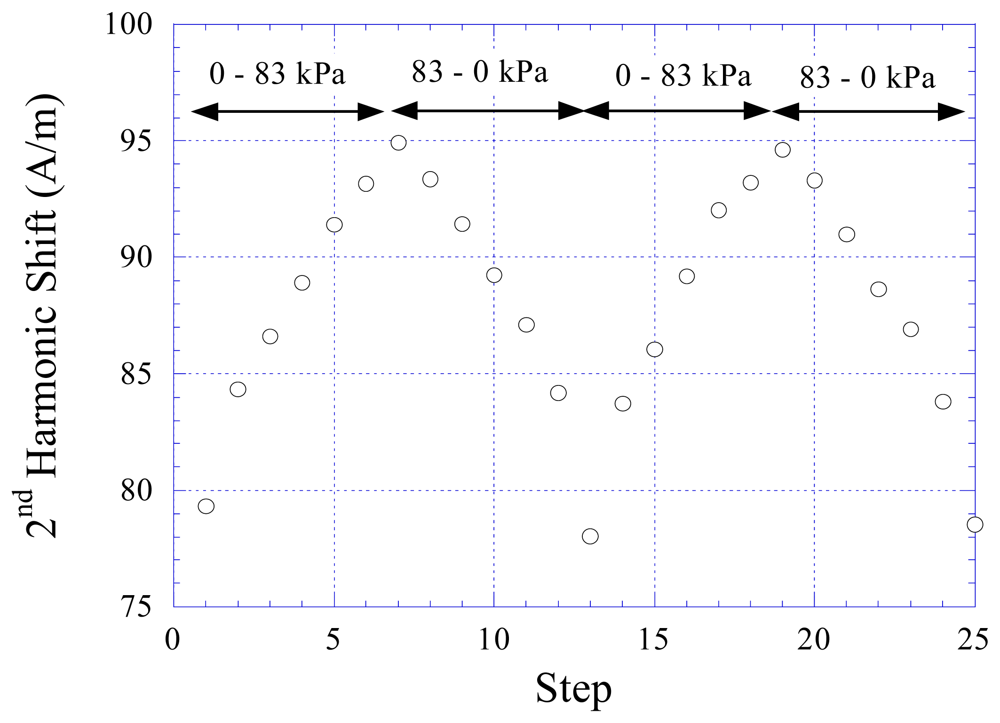
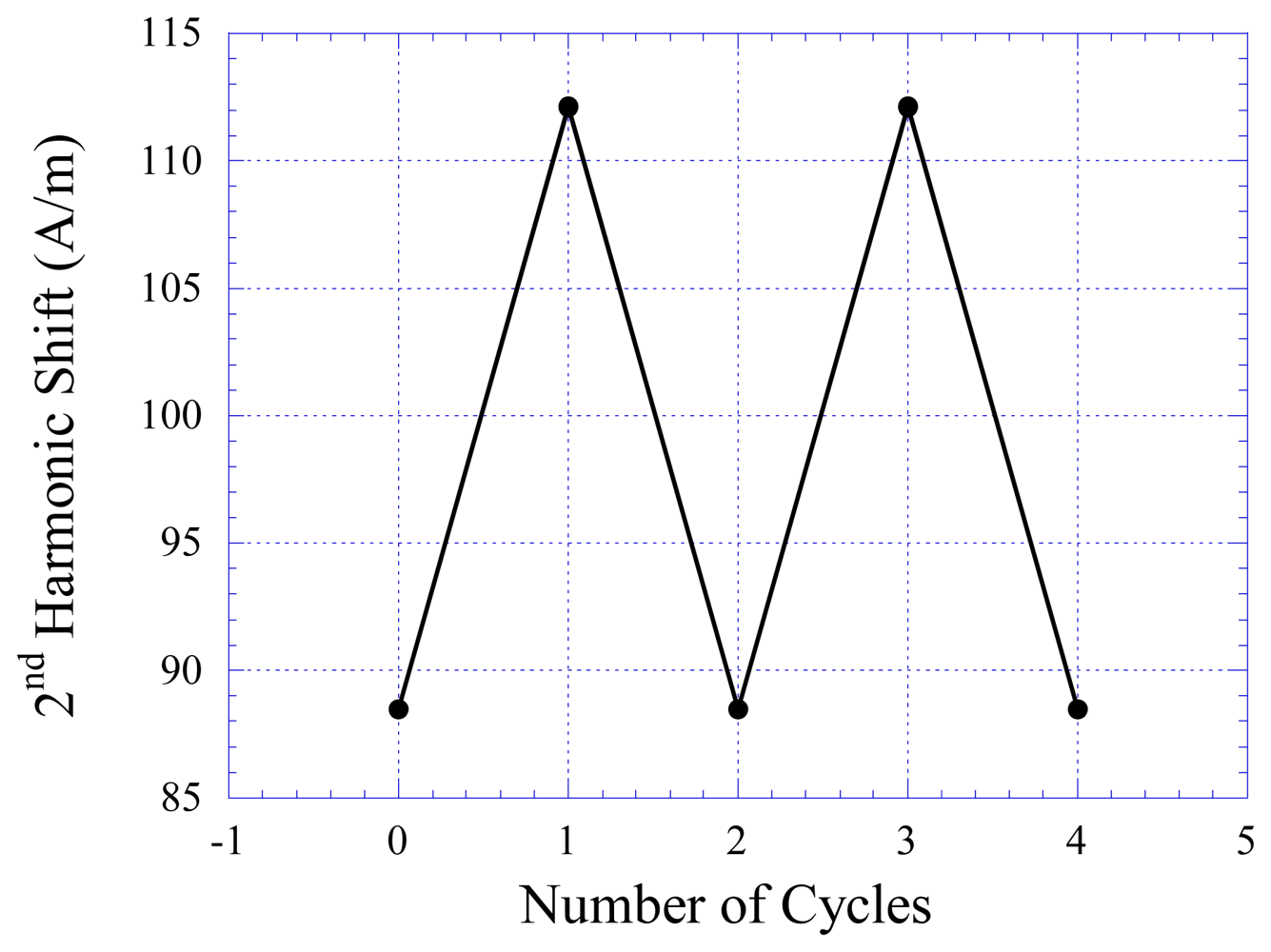
3.2. Pressure Measurements
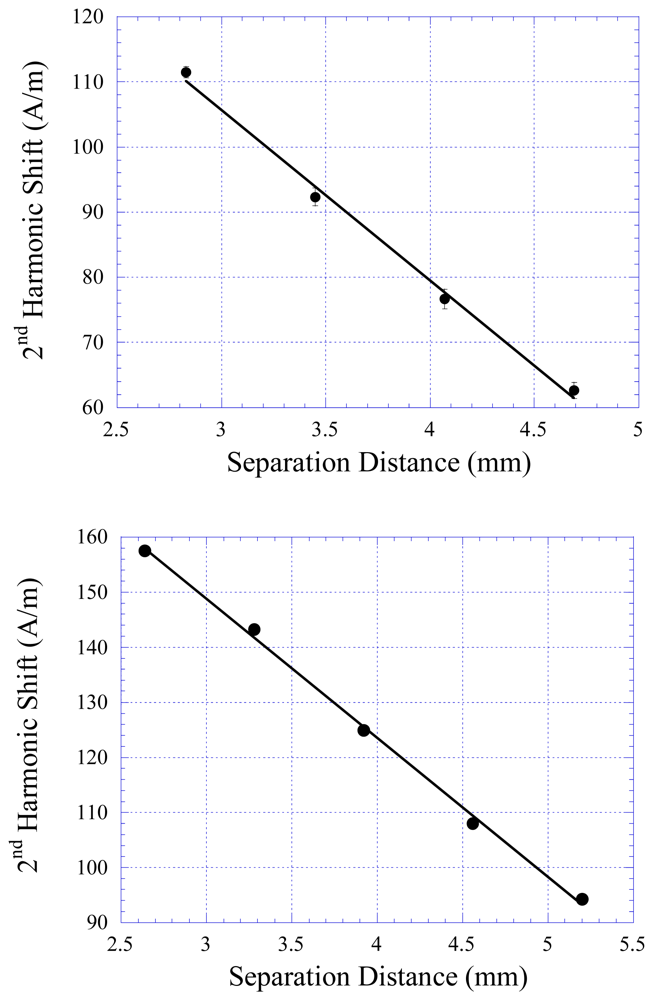
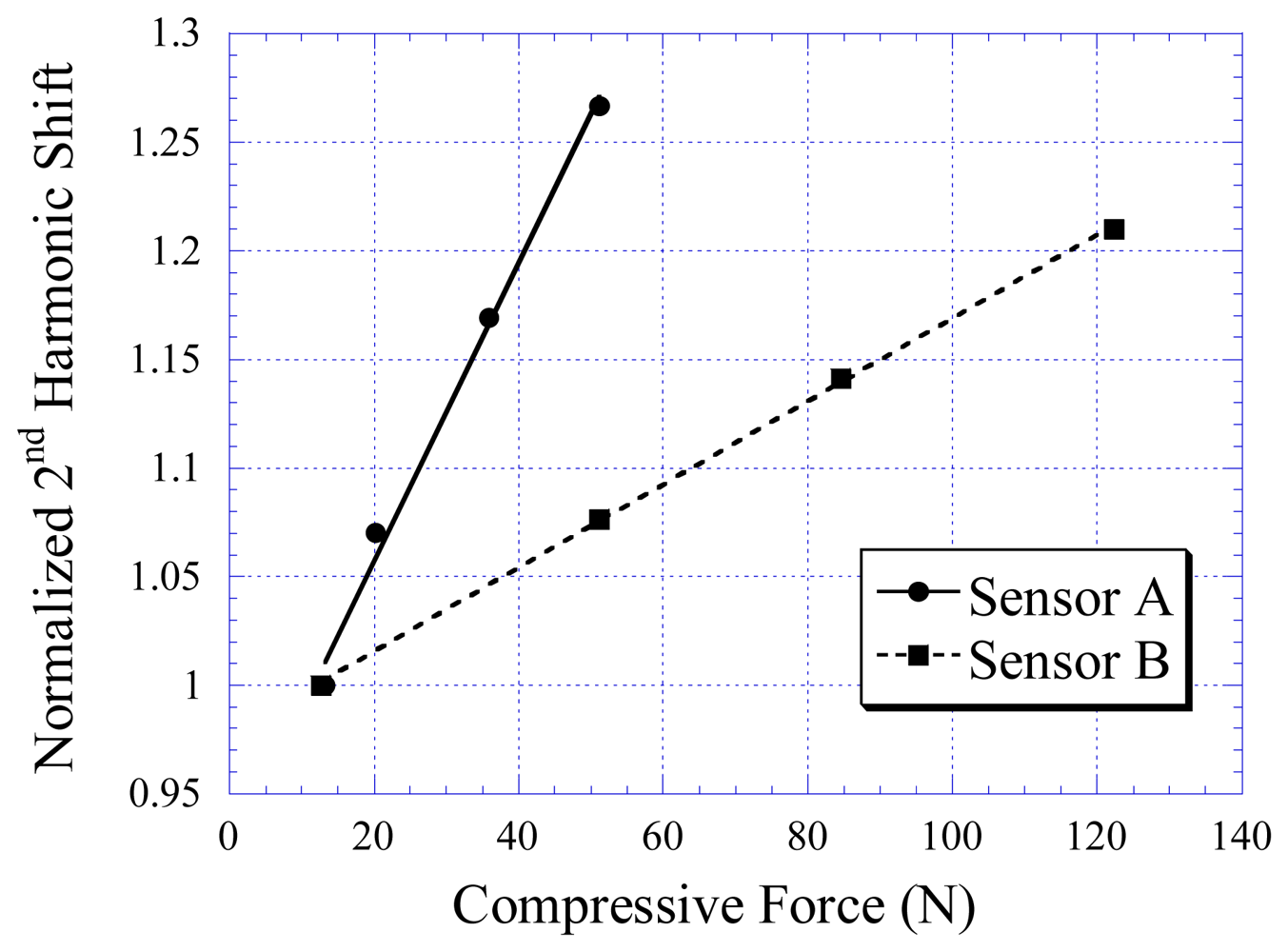
3.3. Stress/strain Measurements
4. Conclusions
Acknowledgments
References
- Aarnoudse, W.; Veer, M.; Pijls, N.H.J.; Woorse, J.; Vercauteren, S.; Tonino, P.; Geven, M.; Rutten, M.; Hagen, E.; Bruyne, B.; Vosse, F. Direct volumetric blood flow measurement in coronary arteries by thermodilution. J. Am. Coll. Cardiol. 2007, 50, 2294–2304. [Google Scholar]
- Shin, K.H.; Moon, C.R.; Lee, T.H.; Lim, C.H.; Kim, Y.J. Flexible wireless pressure sensor module. Sens. Actuat. A 2005, 118, 30–35. [Google Scholar]
- Mariani, A.; Curiono, S.; Zanello, A.; Passaretti, S.; Masci, E.; Rossi, M.; Maschio, A.D.; Testoni, P.A. Secretin MRCP and endoscopic pancreatic monometry in the evaluation of sphincter of Oddi function: a comparative pilot study in patients with idiopathic recurrent pancreatitis. Gastrointest. Endosc. 2003, 58, 847–852. [Google Scholar]
- Matsuyama, J.; Ohnishi, I.; Sakai, R.; Suzuki, H.; Harada, A.; Bessho, M.; Matsumoto, T.; Nakamura, K. Med. Eng. Phys.; 2006; Volume 28, pp. 588–595. [Google Scholar]
- Yang, G.Y.; Bailey, V.J.; Wen, Y.; Lin, G.; Tang, W.C.; Keyak, J.H. Fabrication and characterization of microscale sensors for bone surface strain measurement. Proc. 3rd IEEE Int. Conf. Sensors; 2004; pp. 1355–1358. [Google Scholar]
- Schnakenberg, U.; Kruger, C.; Pfeffer, J.G.; Mokwa, W.; Bogel, G.V.; Gunther, R.; Rode, T.S. Intravascular pressure monitoring system. Sens. Actuat. A 2004, 110, 61–67. [Google Scholar]
- Ellozy, S.H.; Carrocio, A.; Lookstein, R.A.; Minor, M.E.; Sheahan, C.M.; Juta, J.; Cha, A.; Valenzuela, R.; Addis, M.D.; Jacobs, T.S.; Teodorescu, V.J.; Marin, M.L. First experience in human beings with a permanently implantable intrasac pressure transducer for monitoring endovascular repair of abdominal aortic aneurysms. J. Vasc. Surg. 2004, 39, 405–412. [Google Scholar]
- Ong, K.G.; Grimes, C.A. Tracking the harmonic response of magnetically-soft sensors for wireless temperature, stress, and corrosive monitoring. Sens. Actuat. A 2002, 101, 49–61. [Google Scholar]
- Ong, K.G.; Grimes, C.A. Magnetically soft higher order harmonic stress and temperature sensors. IEEE Trans. Magnet. 2003, 39, 3414–3416. [Google Scholar]
- Tan, E.L.; Pereles, B.D.; Shao, R.; Ong, J.; Ong, K.G. A wireless, passive strain sensor based on the harmonic response of magnetically-soft materials. Smart Mater. Struct. 2008, 17, 025015. [Google Scholar]
- Pereles, B.M.; Tan, E.L.; Ong, K.G. A remote query pressure sensor based on magnetic higher-order harmonic fields. IEEE Sensors 2008, in press. [Google Scholar]
- Jedermann, R.; Behrens, C.; Westphal, D.; Lang, W. Applying autonomous sensor systems in logistics: Combining sensor networks, RFIDs and software agents. Sens. Actuat. A 2006, 132, 370–375. [Google Scholar]
- Meiners, M.; Sussenguth, M.; Missal, W.; Schary, T.; Benecke, W.; Lang, W.; Stucker, M. RF smart-sensor for venous ulcer treatment. Proc. Transducers ′05, 13th Int. Conf. Solid-State Sens. Actuat. Microsyst, Seoul, Korea, 5-9 June, 2005; 1, pp. 453–456.
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Tan, E.L.; Pereles, B.D.; Horton, B.; Shao, R.; Zourob, M.; Ong, K.G. Implantable Biosensors for Real-time Strain and Pressure Monitoring. Sensors 2008, 8, 6396-6406. https://doi.org/10.3390/s8106396
Tan EL, Pereles BD, Horton B, Shao R, Zourob M, Ong KG. Implantable Biosensors for Real-time Strain and Pressure Monitoring. Sensors. 2008; 8(10):6396-6406. https://doi.org/10.3390/s8106396
Chicago/Turabian StyleTan, Ee Lim, Brandon D. Pereles, Brock Horton, Ranyuan Shao, Mohammed Zourob, and Keat Ghee Ong. 2008. "Implantable Biosensors for Real-time Strain and Pressure Monitoring" Sensors 8, no. 10: 6396-6406. https://doi.org/10.3390/s8106396
APA StyleTan, E. L., Pereles, B. D., Horton, B., Shao, R., Zourob, M., & Ong, K. G. (2008). Implantable Biosensors for Real-time Strain and Pressure Monitoring. Sensors, 8(10), 6396-6406. https://doi.org/10.3390/s8106396