Robust Forecasting for Energy Efficiency of Wireless Multimedia Sensor Networks


Abstract
:1. Introduction
2. Related Work
3. Preliminaries
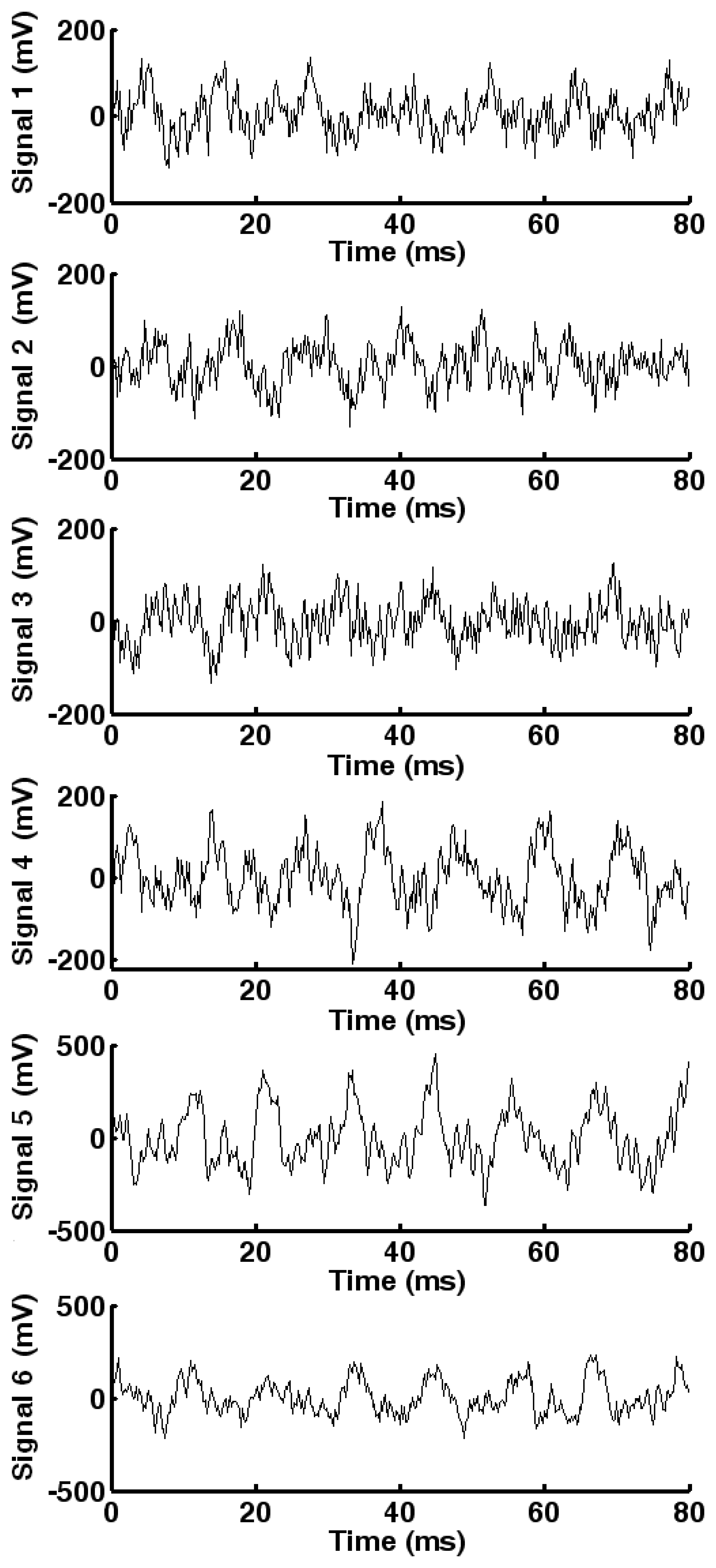
3.1. Acoustic Signal Sensing Model
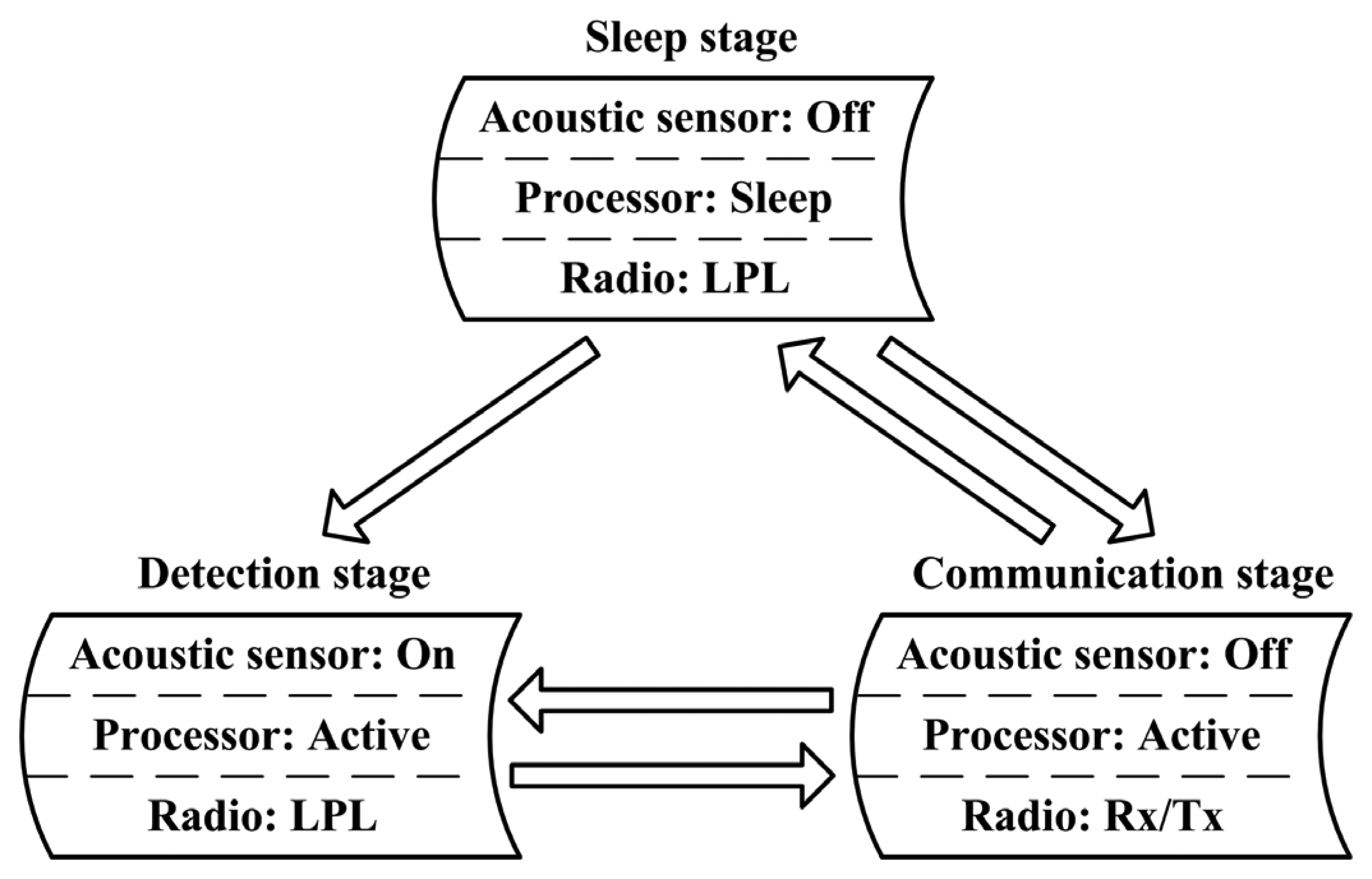
3.2. Energy Consumption Model
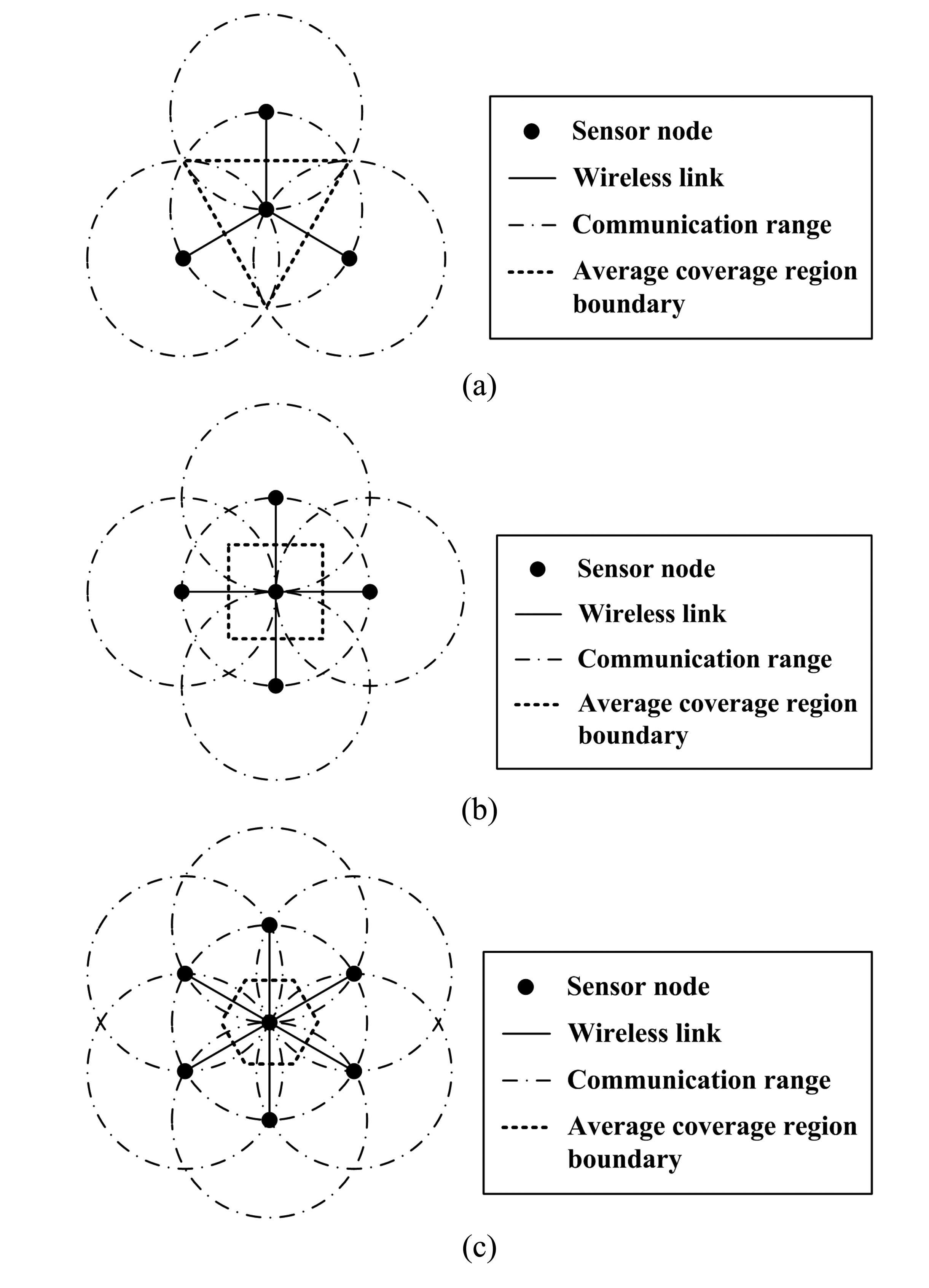
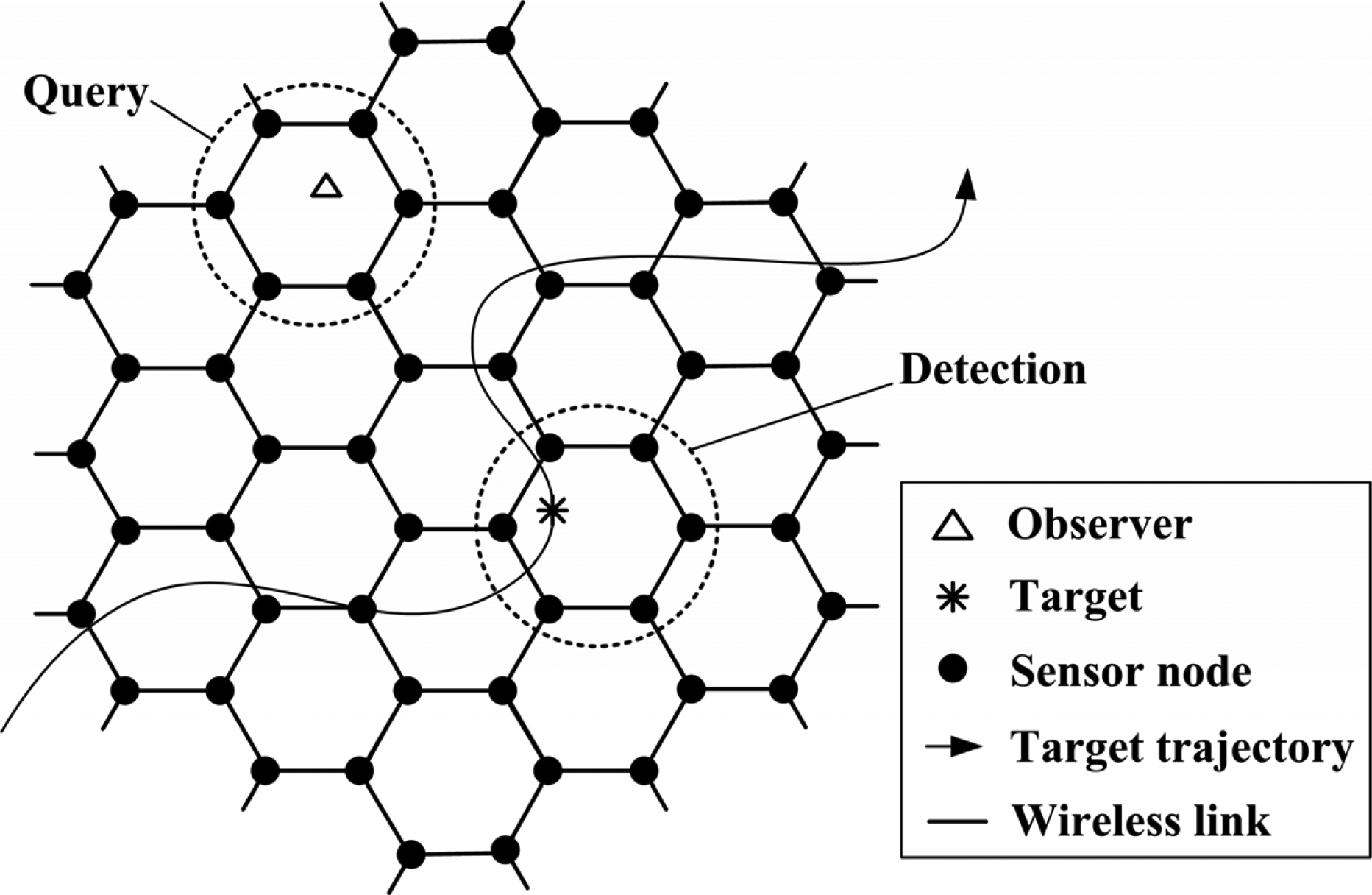
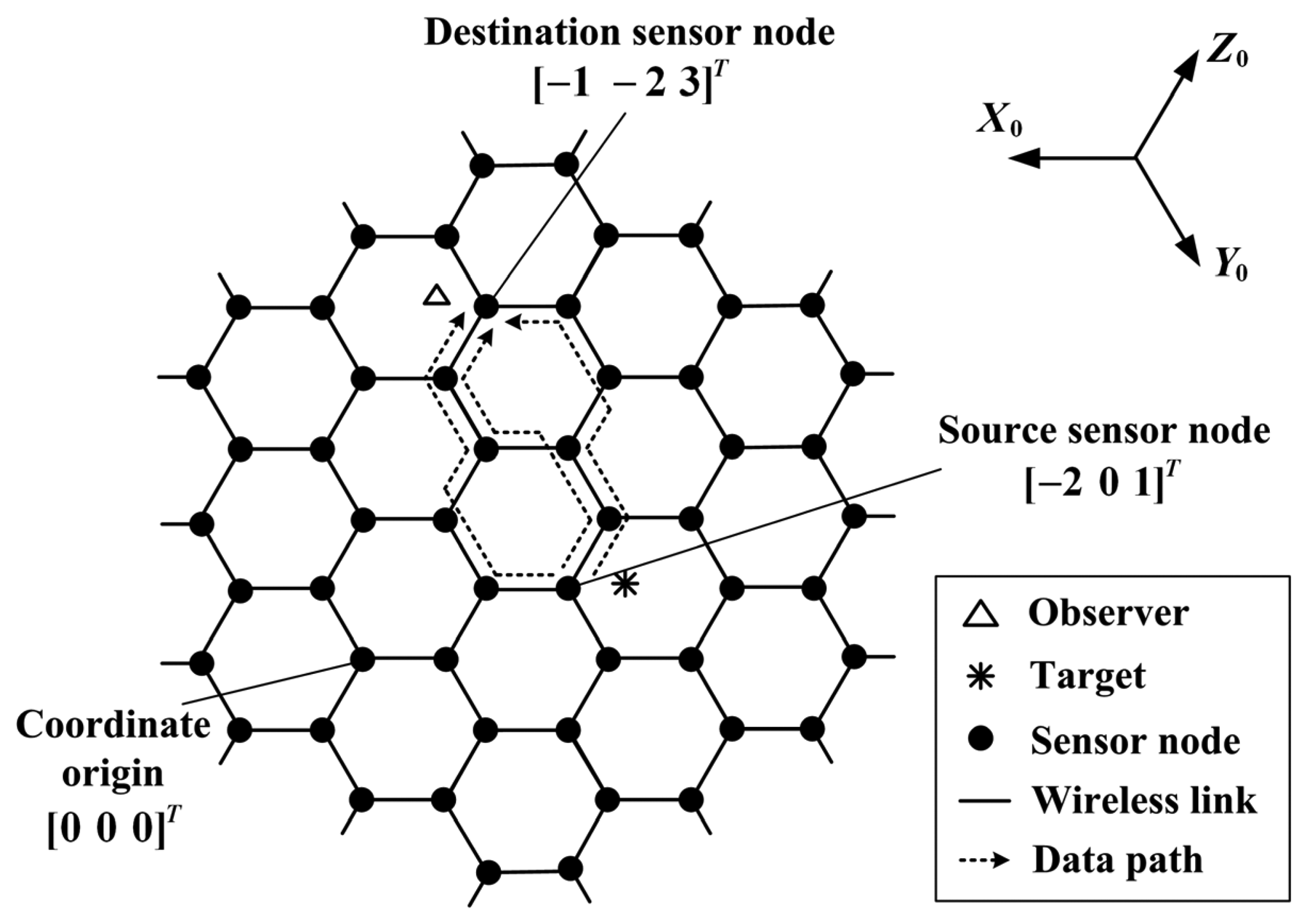
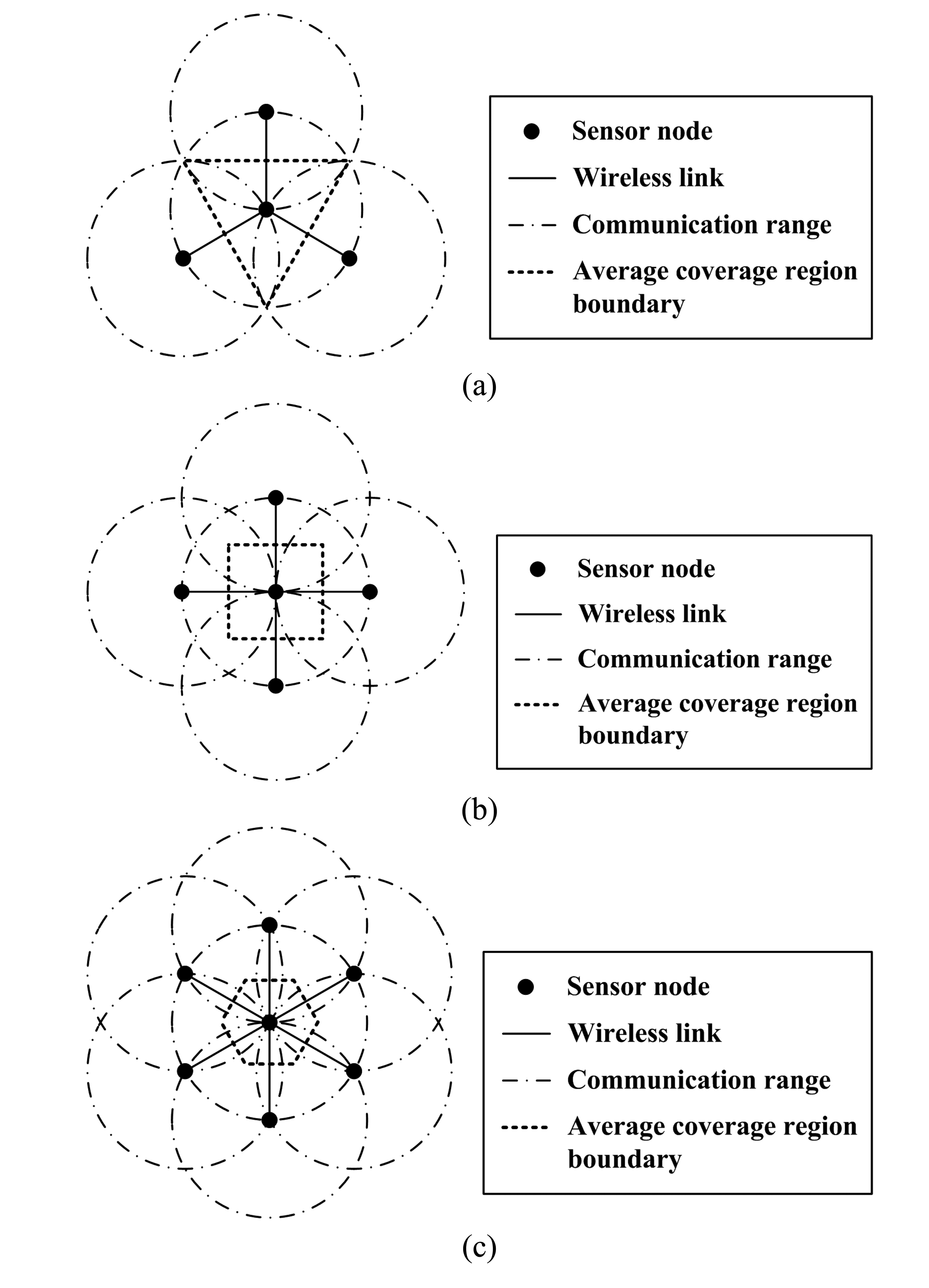
3.3. Distributed Honeycomb Configuration
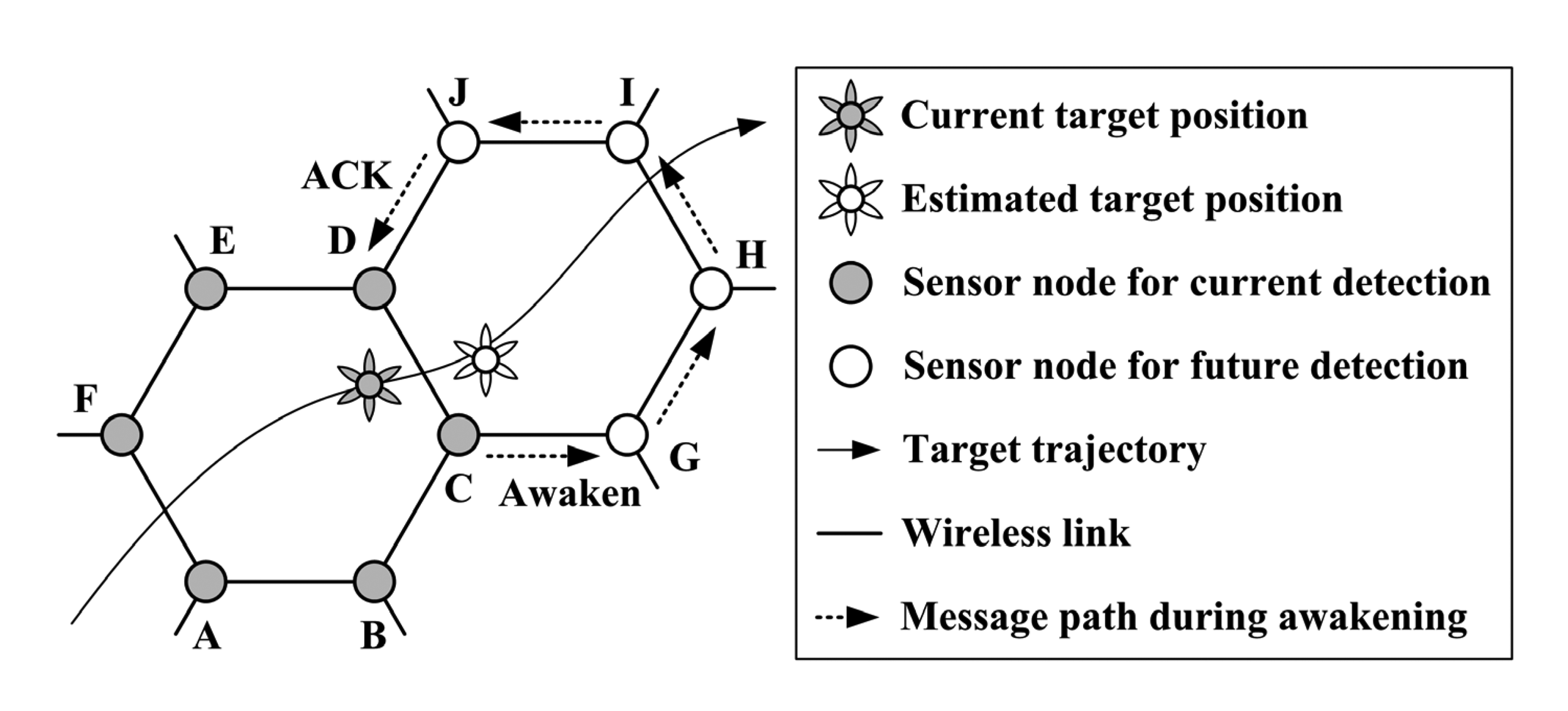
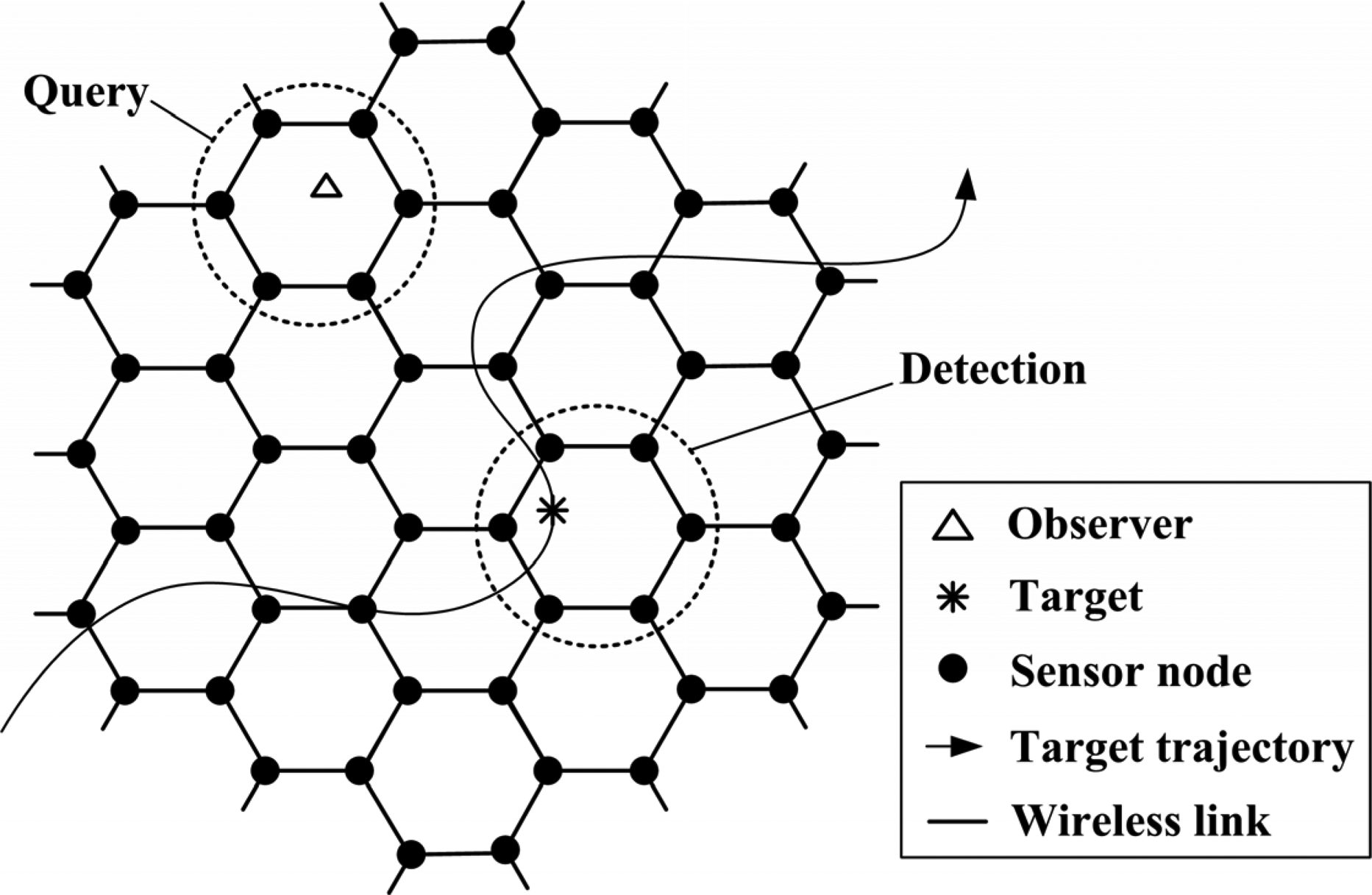
4. Energy-efficient Target Tracking Method
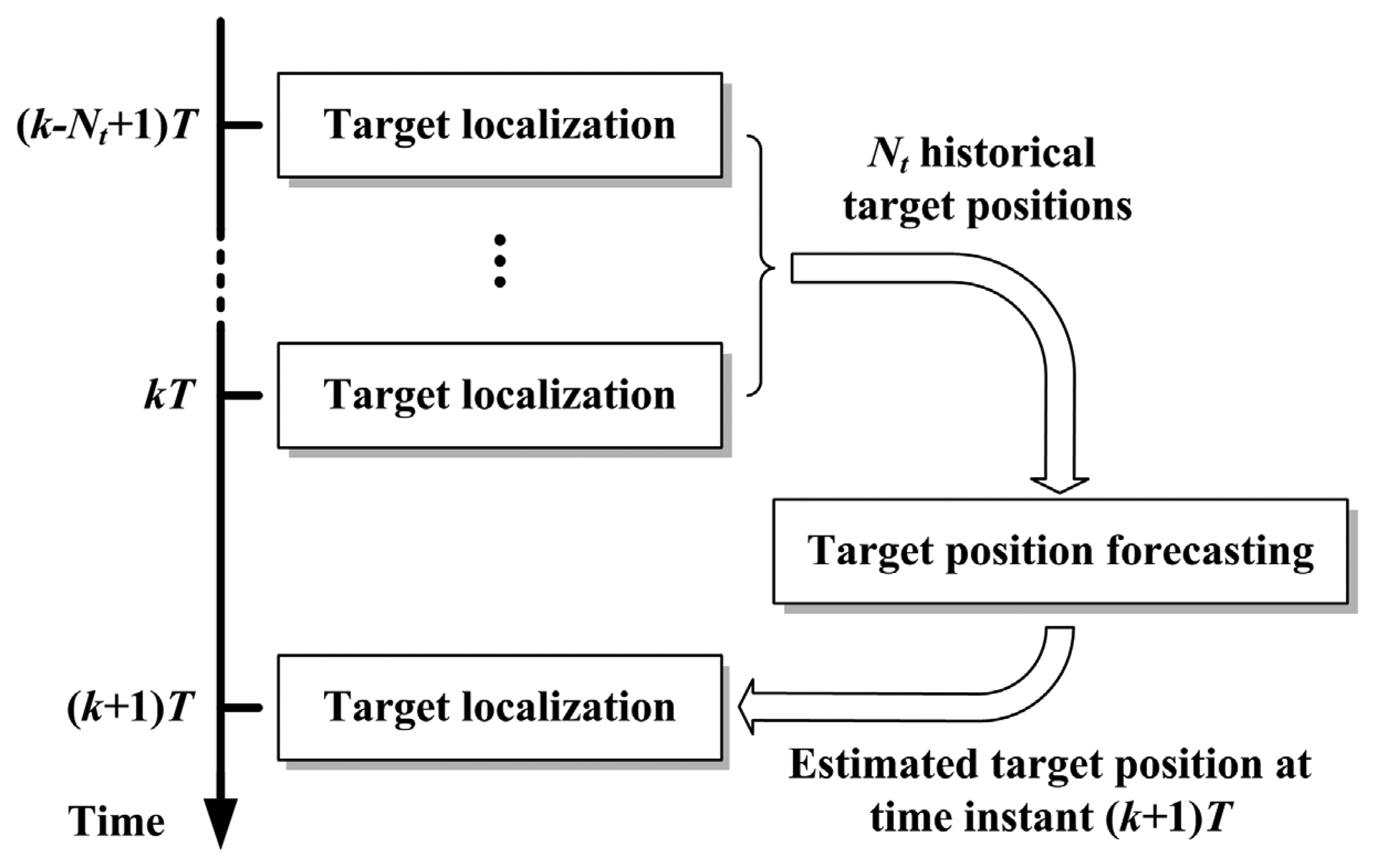
4.1. Target Forecasting by ARMA-RBF
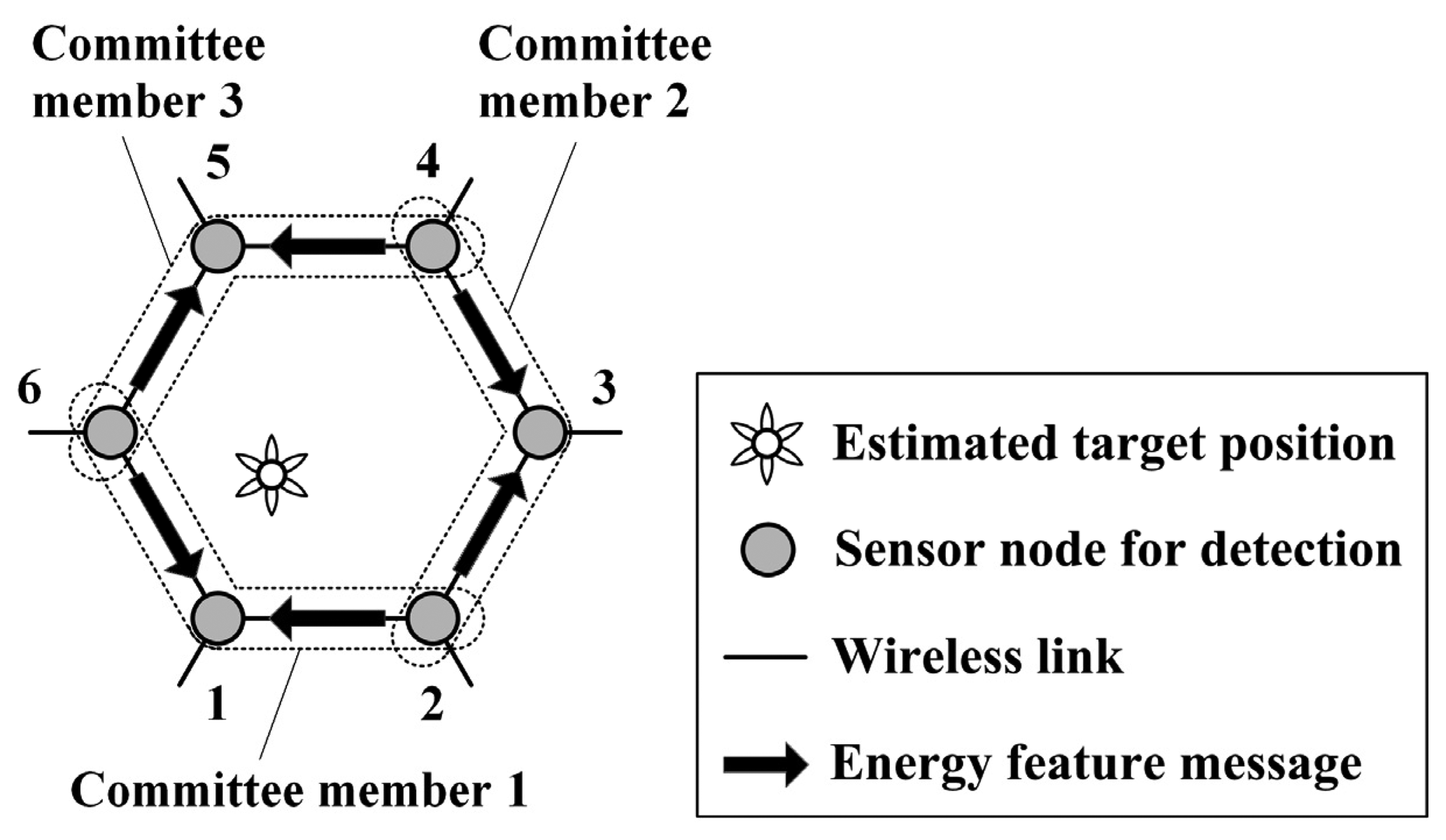
4.2. Target Localization with Committee Decision
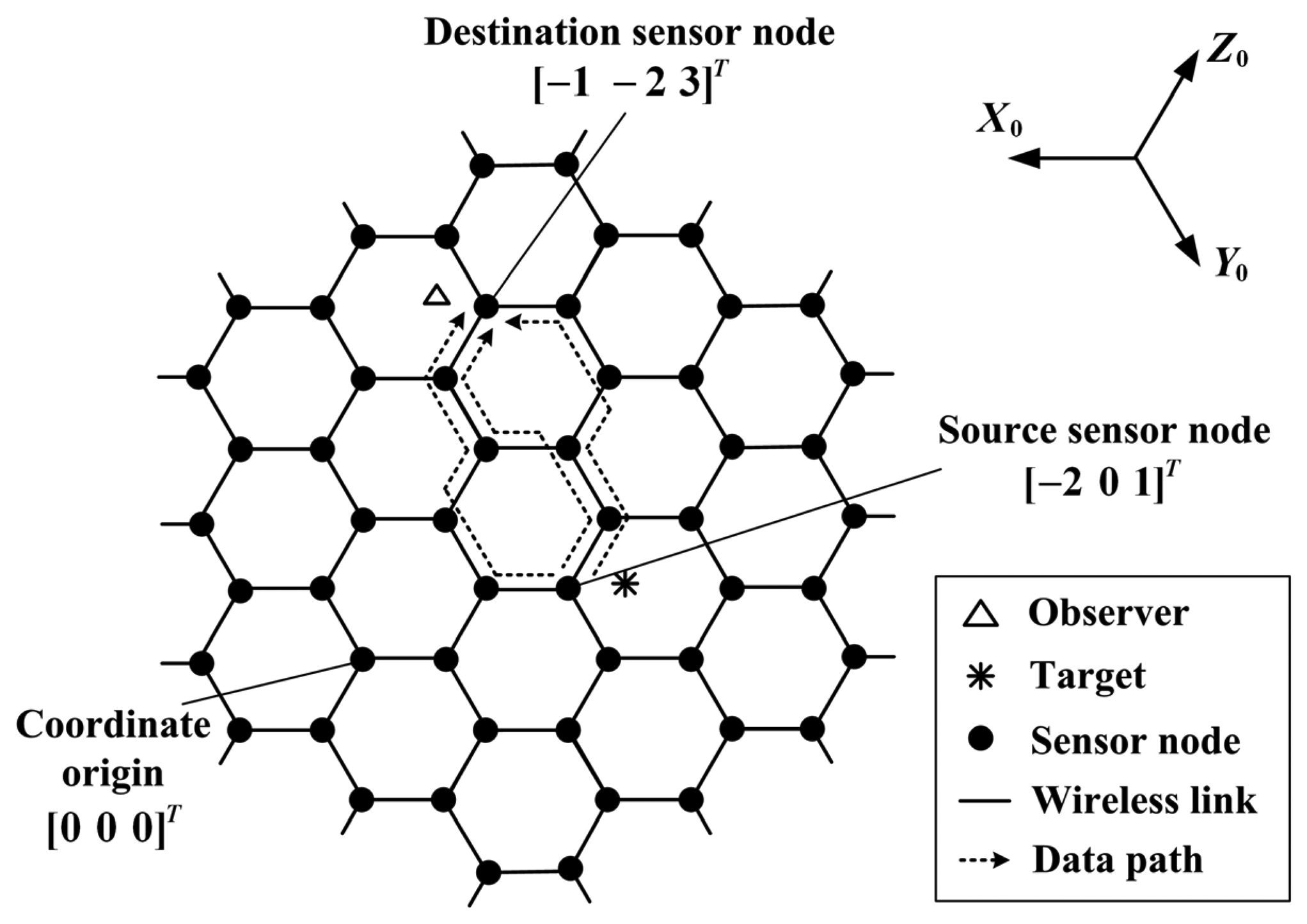
4.3. Sensor-to-observer Routing Scheme
5. Experimental Results
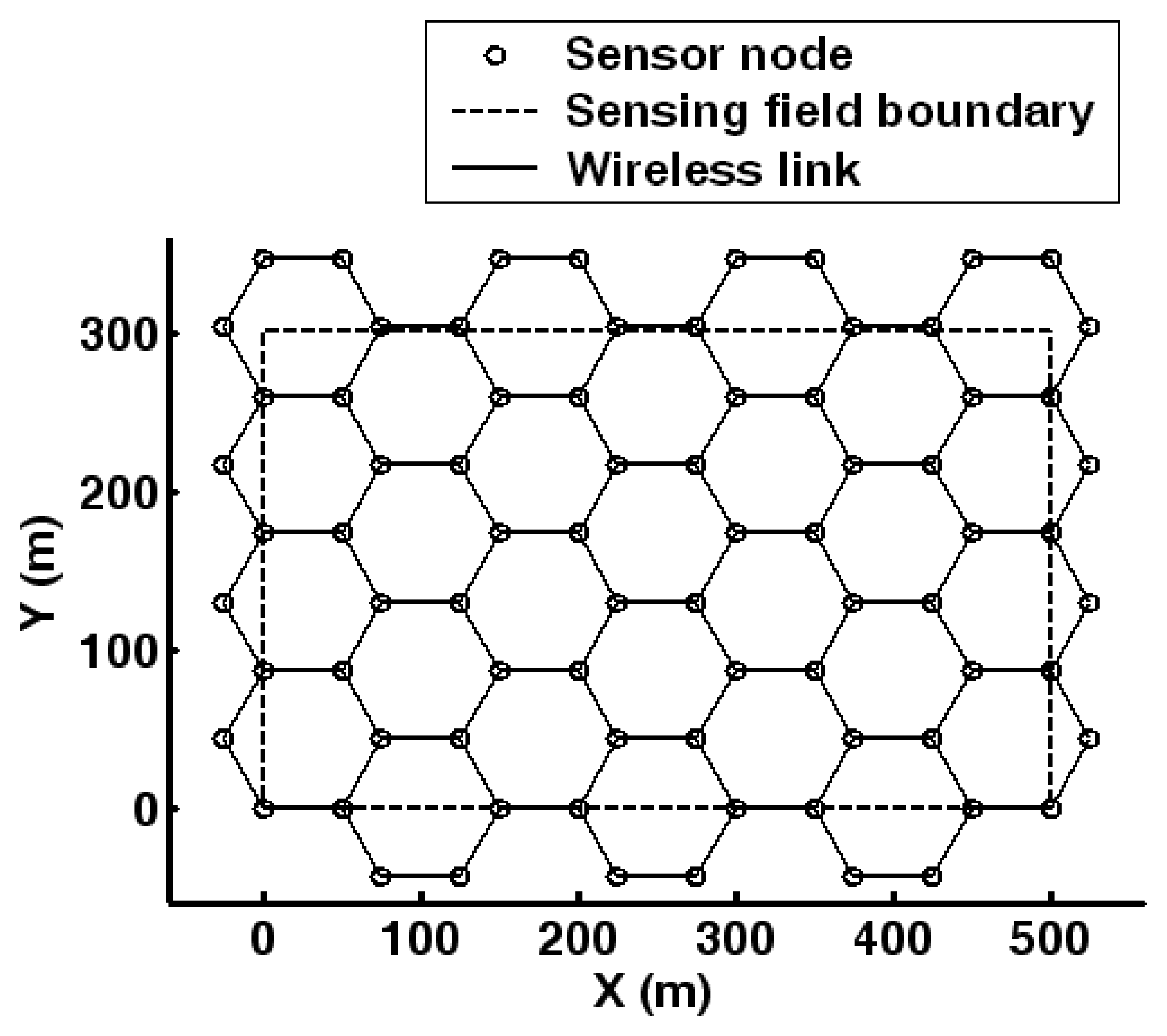
5.1. Experimentation Platform
5.2. Target Localization Experiment
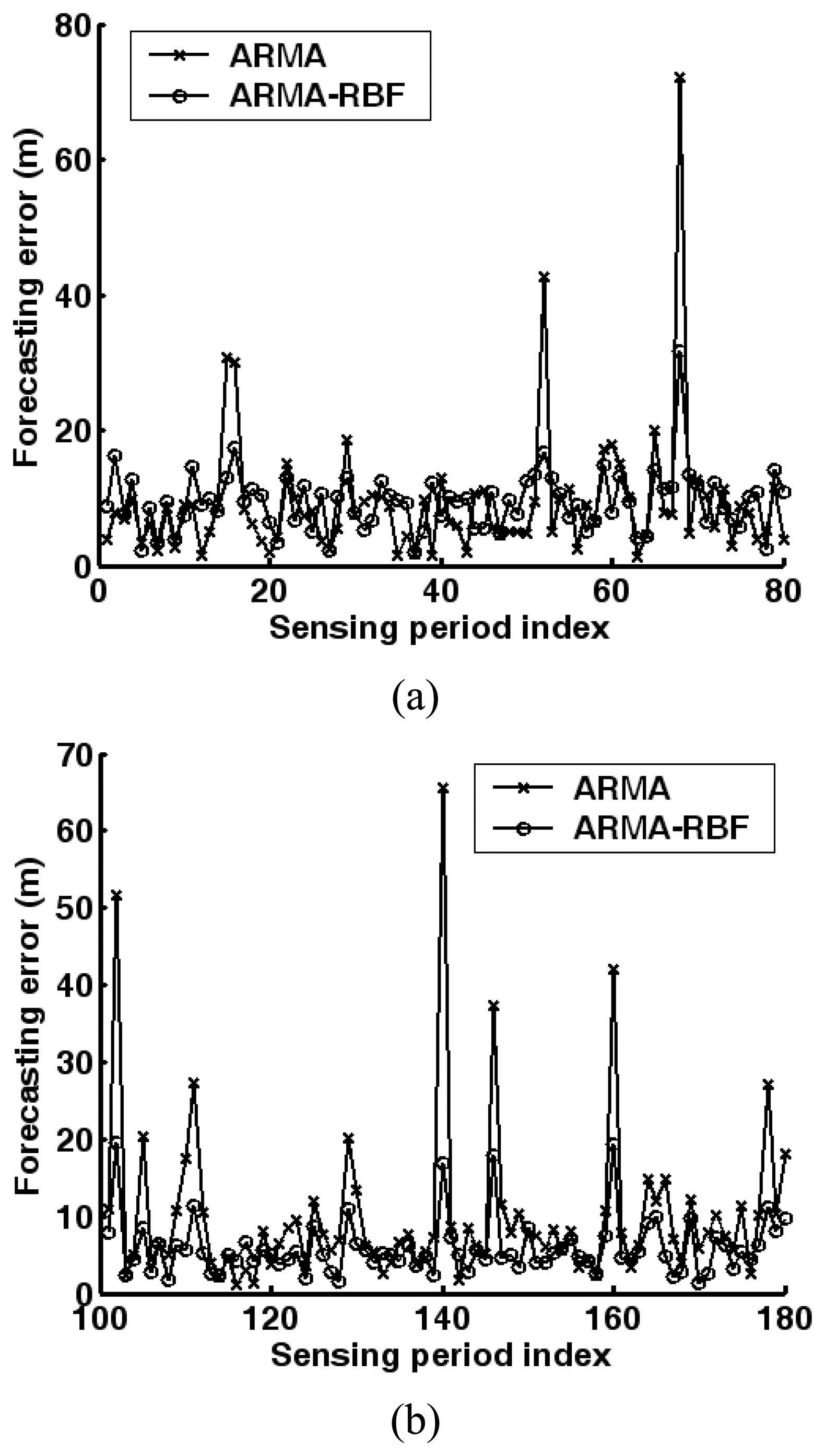
5.3. Target Position Forecasting Experiment
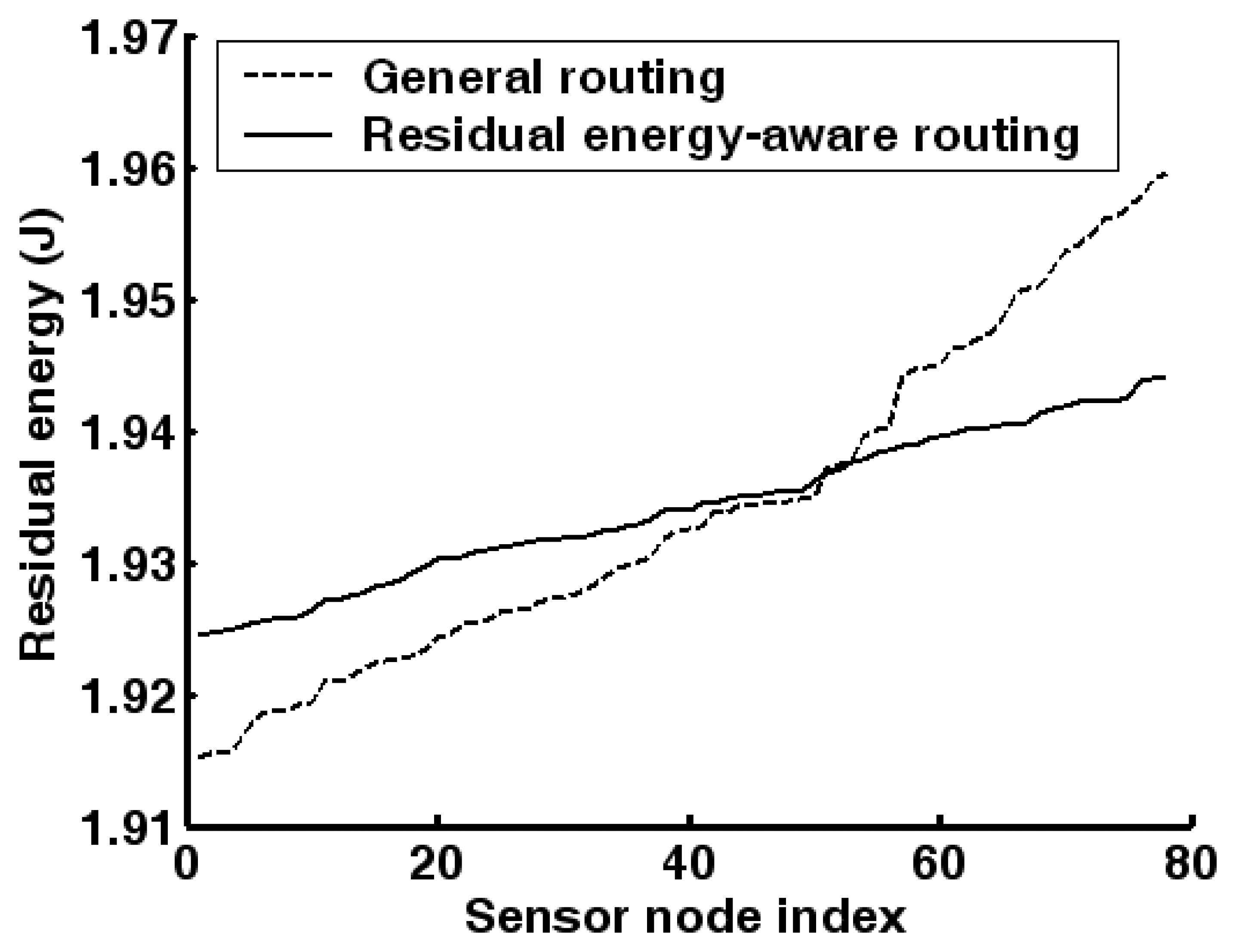
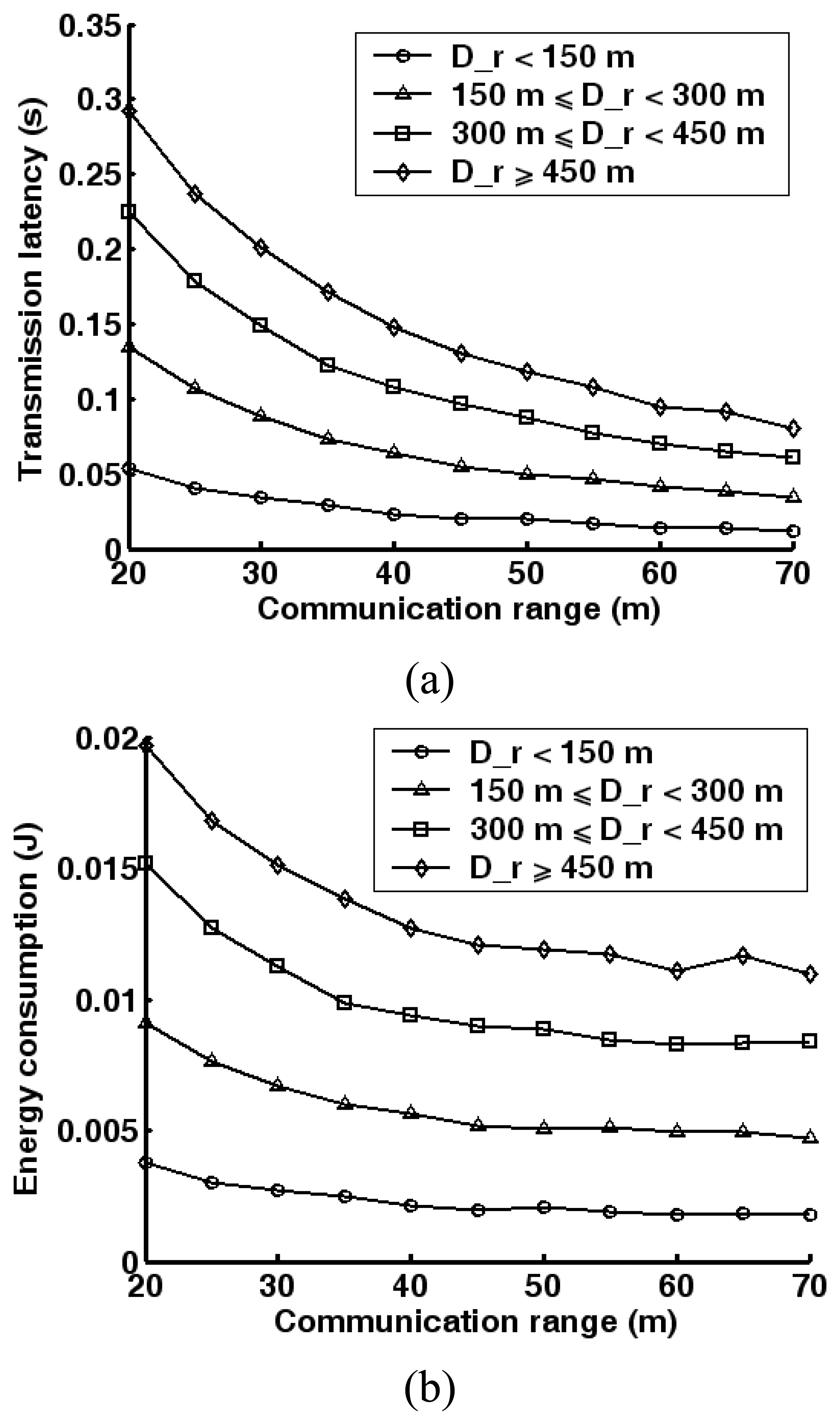
5.4. Energy Efficiency Analysis
6. Conclusions
Acknowledgments
References and Notes
- Akyildiz, I.F.; Melodia, T.; Chowdury, K.R. A survey on wireless multimedia sensor networks. Computer Networks 2007, 51, 921–960. [Google Scholar]
- Huang, H.C.; Huang, Y.M. An implementation of battery-aware wireless sensor network using ZigBee for multimedia service. Proceedings of International Conference on Consumer Electronics, Las Vegas, USA, Jan 7-11, 2006; pp. 369–370.
- Liu, K.; Sayeed, A. M. Type-based decentralized detection in wireless sensor networks. IEEE Transactions on Signal Processing 2007, 55, 1899–1910. [Google Scholar]
- Shin, J.; Chin, M. Optimal transmission range for topology management in wireless sensor networks. In Information Networking, Advances in Data Communications and Wireless Networks, Proceedings of the International Conference on Information Networking (ICOIN) 2006, Sendai, Japan, Jan 16-19, 2006; Chong, I., Kawahara, K., Eds.; pp. 177–185.
- Wang, X.; Wang, S.; Ma, J. An improved particle filter for target tracking in sensor system. Sensors 2007, 7, 144–156. [Google Scholar]
- Rao, S.K. Modified gain extended Kalman filter with application to bearings-only passive manoeuvring target tracking. IEE Proceeding-Radar, Sonar and Navigation 2005, 152, 239–244. [Google Scholar]
- Song, C.; Sharif, H. Performance comparison of Kalman filter based approaches for energy efficiency in wireless sensor networks. Proceedings of the ACS/IEEE 2005 International Conference on Computer Systems and Applications, Jan 03 - 06, 2005; IEEE Computer Society: Washington, DC, USA; pp. 58–65.
- Payne, O.; Marrs, A. An unscented particle filter for GMTI tracking. Proceedings of the IEEE Aerospace Conference 2004, Montana, Mar 6-13, 2004; pp. 1869–1875.
- Zhang, H. Optimal and self-tuning State estimation for singular stochastic systems: a polynomial equation approach. IEEE Transactions on Circuits and Systems 2004, 51, 327–333. [Google Scholar]
- Wies, R.W. Use of ARMA block processing for estimating stationary low-frequency electro-mechanical modes of power systems. IEEE Transactions on Power Systems 2003, 18, 167–173. [Google Scholar]
- Lee, M.J.; Choi, Y.K. An adaptive neurocontroller using RBFN for robot manipulators. IEEE Transactions on Industrial Electronics 2004, 51, 711–717. [Google Scholar]
- Wu, Q.; Rao, N.S.V. On computing mobile agent routes for data fusion in distributed sensor networks. IEEE Transactions on Knowledge and Data Engineering 2004, 6, 740–753. [Google Scholar]
- Liang, S.; Hatzinakos, D. A cross-layer architecture of wireless sensor networks for target tracking. IEEE/ACM Transactions on Networking 2007, 15, 145–158. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Prediction-based dynamic energy management in wireless sensor networks. Sensors 2007, 7, 251–266. [Google Scholar]
- Fan, G.; Zhang, J. Maximizing sensor reuse based on new geometric concepts. Journal of Information Science and Engineering 2004, 20, 477–489. [Google Scholar]
- Szewczyk, R.; Mainwaring, A. An analysis of a large scale habit monitoring application. Proceedings of the ACM Conference on Embedded Networked Sensor Systems 2004, Baltimore, Maryland, USA, Nov 3-5, 2004; pp. 214–226.
- Simon, G.; Maroti, M. Sensor network-based countersniper system. Proceedings of the ACM Conference on Embedded Networked Sensor Systems 2004, Baltimore, Maryland, USA, Nov 3-5, 2004; pp. 1–12.
- Arora, A.; Dutta, P. A line in the sand: A wireless sensor network for target detection, classification, and tracking. Computer Networks 2004, 46, 605–634. [Google Scholar]
- Li, D.; Hu, Y.H. Energy based collaborative source localization using acoustic micro-sensor array. EURASIP Journal on Applied Signal Processing 2003, 4, 321–337. [Google Scholar]
- Wang, X.; Bi, D.; Liang, D.; Wang, S. Agent collaborative target localization and classification in wireless sensor networks. Sensors 2007, 7, 1359–1386. [Google Scholar]
- Li, D.; Wong, K.D.; Hu, Y.H.; Sayeed, A.M. Detection, classification and tracking of targets in distributed sensor networks. IEEE Signal Processing Magazine 2002, 19, 17–29. [Google Scholar]
- He, T.; Krishnamurthy, S.; Luo, L. Vigilnet: An integrated sensor network system for energy-efficient surveillance. ACM Transactions on Sensor Networks 2006, 1–38. [Google Scholar]
- Zhang, W.; Cao, G. Optimizing tree reconfiguration for mobile target tracking in sensor networks, Proceedings of the IEEE INFOCOM 2004, Hong-Kong, Mar 7-11, 2004; pp. 2434–2445.
- Aslam, J.; Butler, Z.; Crespi, V. Tracking a moving object with a binary sensor network. Proceedings of the ACM Conference on Embedded Networked Sensor Systems 2003, Los Angeles, California, USA, Nov 5-7, 2003; pp. 150–161.
- Duh, F.B.; Lin, C.T. Tracking a maneuvering target using neural fuzzy network. IEEE Transactions on System, Man, and Cybernetics 2004, 34, 16–33. [Google Scholar]
- Zhao, F.; Shin, J. Information-driven dynamic sensor collaboration for tracking applications. IEEE Signal Processing Magazine 2002, 19, 61–72. [Google Scholar]
- Liu, W.; Farooq, M. An ARMA model based scheme for maneuvering target tracking. Proceedings of the Midwest Symposium on Circuits and Systems 1994, Hiroshima, Japan, Jul 25-28, 2004; pp. 1408–1411.
- Desouky, A.A.; Elkateb, M.M. Hybrid adaptive techniques for electric-load forecast using ANN and ARIMA. IEE Proceedings-Generation, Transmission and Distribution 2000, 147, 213–217. [Google Scholar]
- Li, W.M.; Liu, J.W. The financial time series forecasting based on proposed ARMA-GRNN model. Proceedings of International Conference on Machine Learning and Cybernetics; 2005; pp. 2005–2009. [Google Scholar]
- He, T.; Blum, B.M. AIDA: Adaptive application independent data aggregation in wireless sensor networks. ACM Transactions on Embedded Computing System, special issue on Dynamically Adaptable Embedded 2004, 426–457. [Google Scholar]
- Du, X.; Lin, F. Efficient energy management protocol for target tracking sensor networks. Proceedings of the IEEE International Symposium on Integrated Network Management 2005, Nice, France, May 15-19, 2005; pp. 45–58.
- Sheng, X.; Hu, Y. Energy based acoustic source localization. Proceedings of the ACM/IEEE International Conference on Information Processing in Sensor Networks 2003, Palo Alto, California, USA, Apr 22-23, 2003; pp. 285–300.
- Dutta, P.; Grimmer, M. Design of a wireless sensor network platform for detecting rare, random, and ephemeral events. Proceedings of the ACM/IEEE International Conference on Information Processing in Sensor Networks 2005, Los Angeles, CA, USA, Apr 25-27, 2005; pp. 497–502.
- Durte, M.; Hu, Y.H. Vehicle classification in distributed sensor networks. Journal of Parallel and Distributed Computing 2004, 64, 826–838. [Google Scholar]
- Deb, B.; Bhatnagar, S.; Nath, B. A topology discovery algorithm for sensor networks with applications to network management. Technical Report, DCS-TR-441, Rutgers University 2001. [Google Scholar]
- Krohn, A.; Beigl, M. Increasing connectivity in wireless sensor network using cooperative transmission. Proceedings of the International Conference on Networked Sensing Systems 2006, Chicago, IL, USA, May 31-Jun 2, 2006; pp. 1–8.
- Stojmenovic, I. Honeycomb Networks: Topological Properties and Communication Algorithms. IEEE Transactions on Parallel and Distributed System 1997, 8, 1036–1042. [Google Scholar]
- Broersen, P.M.T. Automatic identification of time-series models from long autoregressive models. IEEE Transactions on Instrumentation and Measurement 2005, 54, 1862–1868. [Google Scholar]
- Biscainho, L.W.P. AR model estimation from quantized signals. IEEE Signal Processing Letters 2004, 11, 183–185. [Google Scholar]
- Haykin, S. Neural Networks: a Comprehensive Foundation; Prentice Hall: NJ, USA, 1999. [Google Scholar]
- Shi, M.H.; Amine, B. Committee machine with over 95% classification accuracy for combustible gas identification. Proceedings of the IEEE International Conference on Electronics, Circuits and Systems 2006, Nice, France, Dec 10-13, 2006; pp. 862–865.
- Wang, X.; Wang, S. Collaborative signal processing for target tracking in distributed wireless sensor networks. Journal of Parallel and Distributed Computing 2007, 67, 501–515. [Google Scholar]
- Chen, A.; Lee, D. HIMAC: High throughput MAC layer multicasting in wireless networks. Proceedings of the IEEE International Conference on Mobile Ad hoc and Sensor Systems 2006, oVancouver, Canada, Oct 9-12, 2006; pp. 41–50.
- MICAz Datasheet; Crossbow Technology Inc.: San Jose, California, 2006.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Acoustic sensor | Processor | ||
| Operation mode | Off | On | Sleep | Active |
| Power consumption (mW) | 0.003 | 1.73 | 0.03 | 24 |
| Startup Time (ms) | 1 | 0.2 | ||
| Latency (ms) | Destination stage | |||
|---|---|---|---|---|
| Sleep | Detection | Communication | ||
| Original stage | Sleep | - | 1.2 | 2.7 |
| Detection | - | - | 3.5 | |
| Communication | 2.7 | 3.5 | - | |
© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Wang, X.; Ma, J.-J.; Ding, L.; Bi, D.-W. Robust Forecasting for Energy Efficiency of Wireless Multimedia Sensor Networks. Sensors 2007, 7, 2779-2807. https://doi.org/10.3390/s7112779
Wang X, Ma J-J, Ding L, Bi D-W. Robust Forecasting for Energy Efficiency of Wireless Multimedia Sensor Networks. Sensors. 2007; 7(11):2779-2807. https://doi.org/10.3390/s7112779
Chicago/Turabian StyleWang, Xue, Jun-Jie Ma, Liang Ding, and Dao-Wei Bi. 2007. "Robust Forecasting for Energy Efficiency of Wireless Multimedia Sensor Networks" Sensors 7, no. 11: 2779-2807. https://doi.org/10.3390/s7112779
APA StyleWang, X., Ma, J.-J., Ding, L., & Bi, D.-W. (2007). Robust Forecasting for Energy Efficiency of Wireless Multimedia Sensor Networks. Sensors, 7(11), 2779-2807. https://doi.org/10.3390/s7112779