


Role of Radio Telescopes in Space Debris Monitoring: Current Insights and Future Directions





Abstract
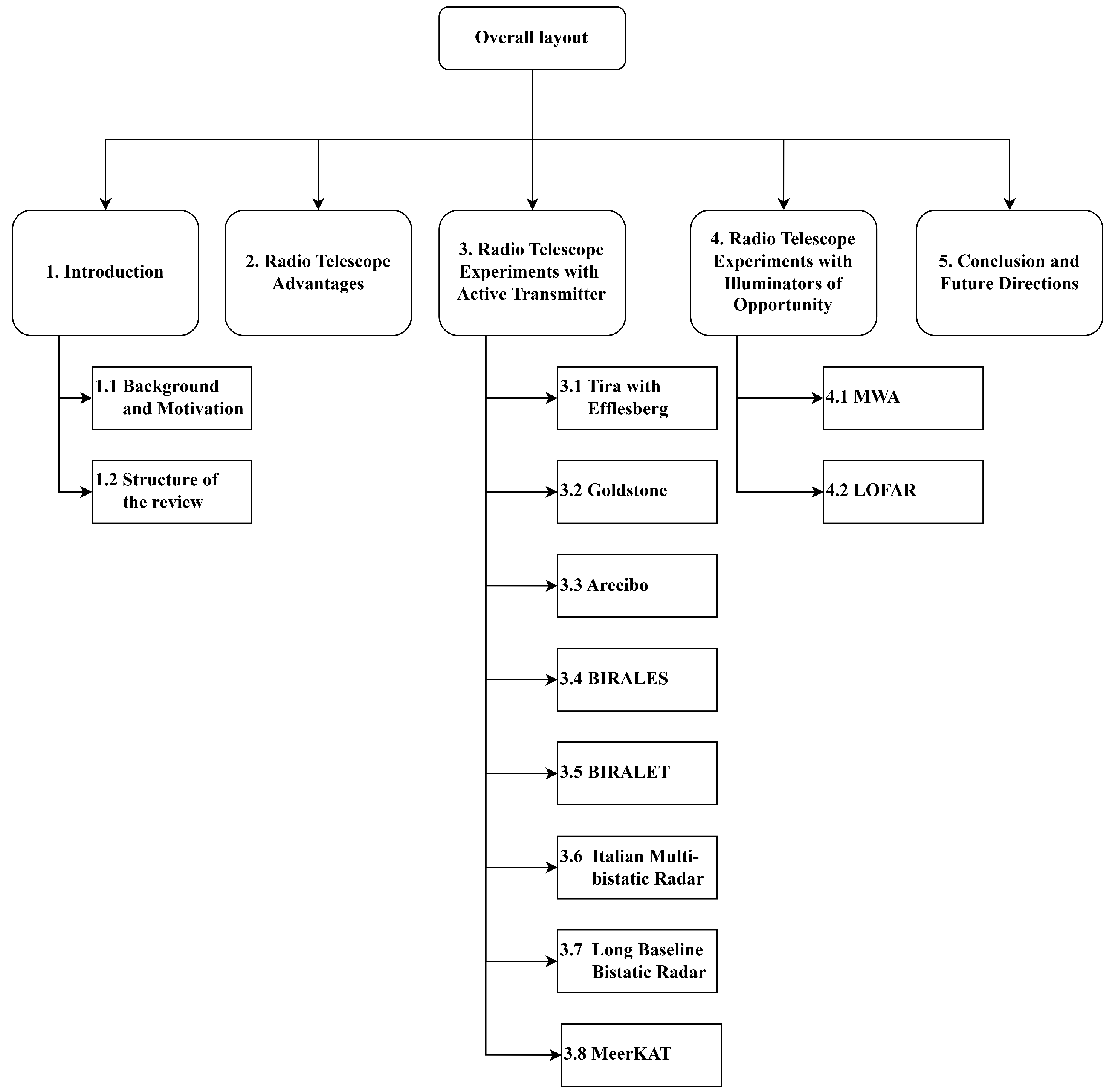
1. Introduction
1.1. Background and Motivation
1.2. Structure of the Review
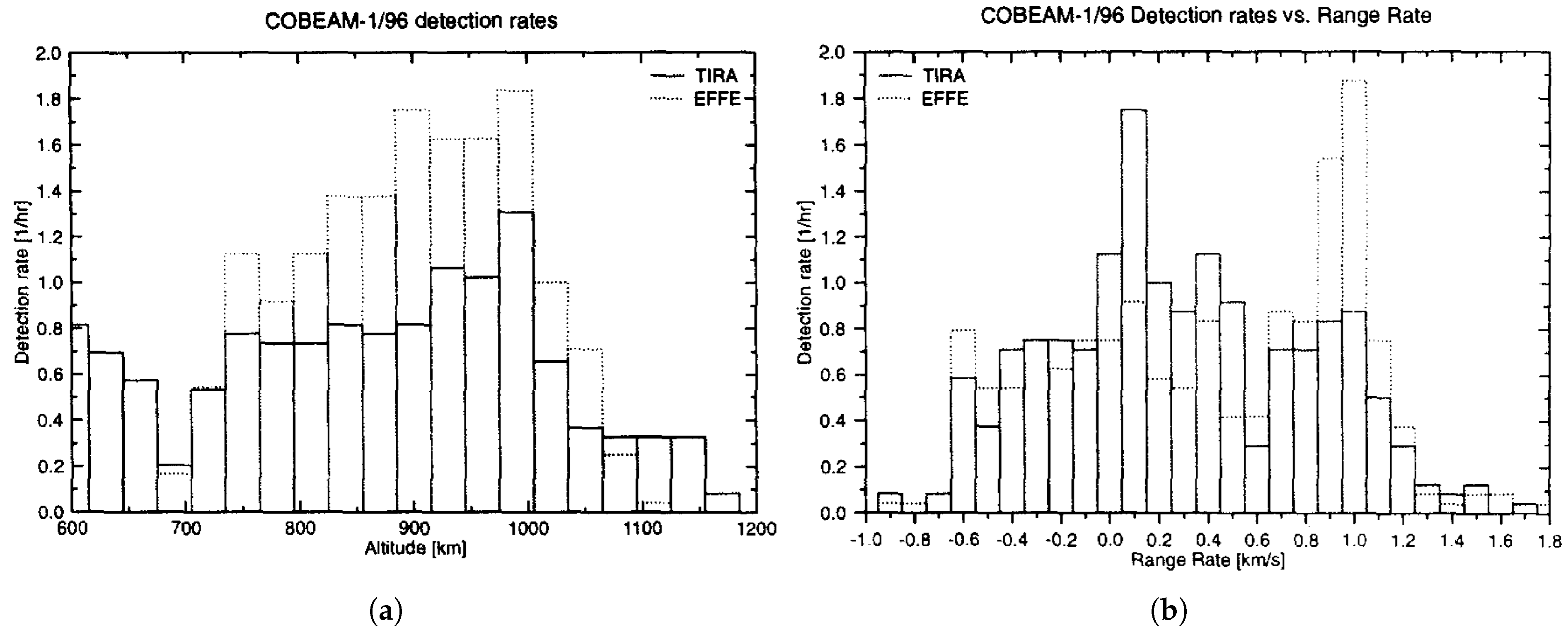
- Active systems are those in which the radio telescope acts as a receiver in conjunction with a separate high-power narrow-beam radar transmitter. These systems emit controlled signals and analyze the reflections from space objects. However, the narrow beams of the radar and receiver limit the coverage area. This is consistent with the operation of most space-surveillance radar systems that use single narrow beams or fence configurations. One example of this kind of system is the Effelsberg radio telescope with Tracking and Imaging Radar (TIRA) as the transmitter [16]. Figure 2a illustrates an active bistatic configuration of the TIRA–Effelsberg system, where a narrow beam transmitter TIRA illuminates the target and the Effelsberg radio telescope captures the reflected signal.
- Passive bistatic radar systems rely on existing sources of illumination, such as FM and DVB signals. Unlike active radar systems, passive radar does not require a dedicated transmitter, making it the most cost-effective alternative. In this setup, single or distributed arrays of radio telescopes are paired with broadband transmitters located at significant distances. The wider field of view of the receiver, combined with the broad broadcast coverage of the transmitter, results in a significantly larger surveillance volume. Although this setup decreases the power concentration on space objects, it offers the benefit of a longer detection time for space debris, allowing precise orbital calculations without requiring previous data. Moreover, a distributed ground broadcast network allows several simultaneous sources of illumination. One such example is the Murchison Widefield Array (MWA) in Australia [17]. Figure 2b illustrates a passive radar configuration, where MWA functions as a receiving system capturing signals reflected from a space object, using non-cooperative transmitters (illuminators of opportunity).

2. Why Use Radio Telescopes?
- The high sensitivity of radio telescopes arises from their large collecting areas. According to antenna theory, receiver antenna gain () in Equation (1) can be expressed aswhere denotes the effective reception area. The larger the effective area, the larger the signal-to-noise ratio. Hence, the large aperture size of the radio telescopes significantly enhances their detection range.
- The lower system noise temperature () of radio telescopes is another key factor contributing to their higher SNR, as it is inversely proportional. This improved sensitivity is achieved by cryogenically cooling the receiver front-end, including the low-noise amplifiers, to temperatures as low as 4 Kelvin using liquid helium. Such cryogenic cooling significantly reduces thermal noise and enhances the overall sensitivity of the system [19].
- In a bistatic configuration, separating the transmitter and receiver enhances angular diversity, minimizing blind spots and improving detection capabilities. The total bistatic range, given by , provides greater flexibility in observation geometry. This configuration complements traditional monostatic radar systems by enhancing coverage and redundancy [20].
- Radio telescopes can also contribute to debris characterization by analyzing radar cross-sections at multiple scattering angles, providing detailed information about the size, shape, and material composition of debris, as is a function of , where is the incident angle, is the scattering angle, and is the polarization. This detailed profiling is vital for understanding the physical properties of debris and assessing its potential threats [21].
- Interferometric capabilities from modern phased array radio telescopes such as the Square Kilometre Array (SKA) enable high-resolution imaging of space debris, allowing precise visualization of debris clouds and their spatial distribution.
- Using these radio telescopes in a multistatic configuration becomes beneficial, as the systems already work in synchronization for Very Long Baseline Interferometry (VLBI) or similar projects.
- Another benefit of using a radio telescope is to utilize the existing infrastructure, primarily designed for other purposes, which makes the overall system cost-effective.
3. Radio Telescope Measurements with Active Transmitters
3.1. TIRA with the Effelsberg Telescope
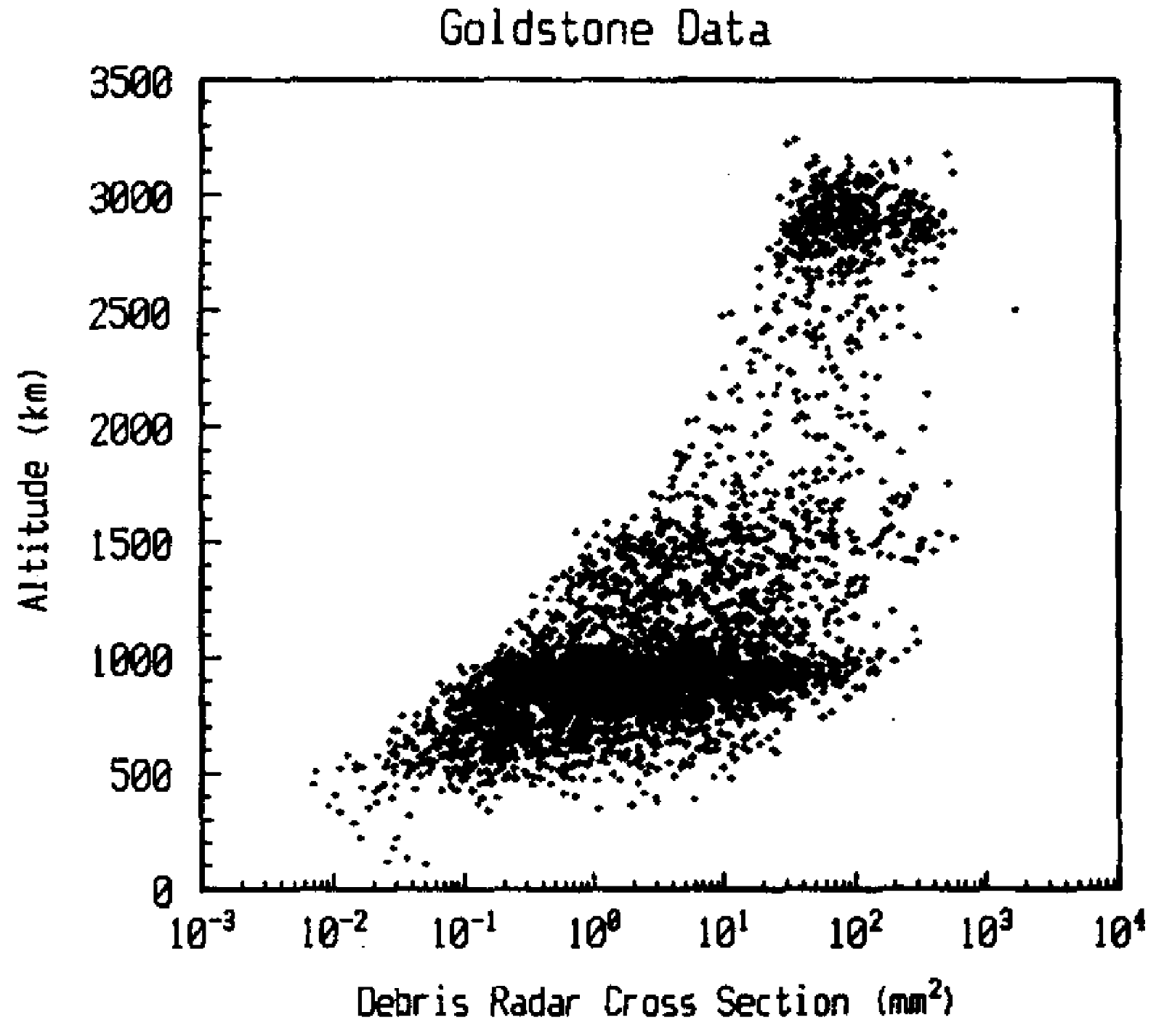
3.2. Goldstone Orbital Debris Radar
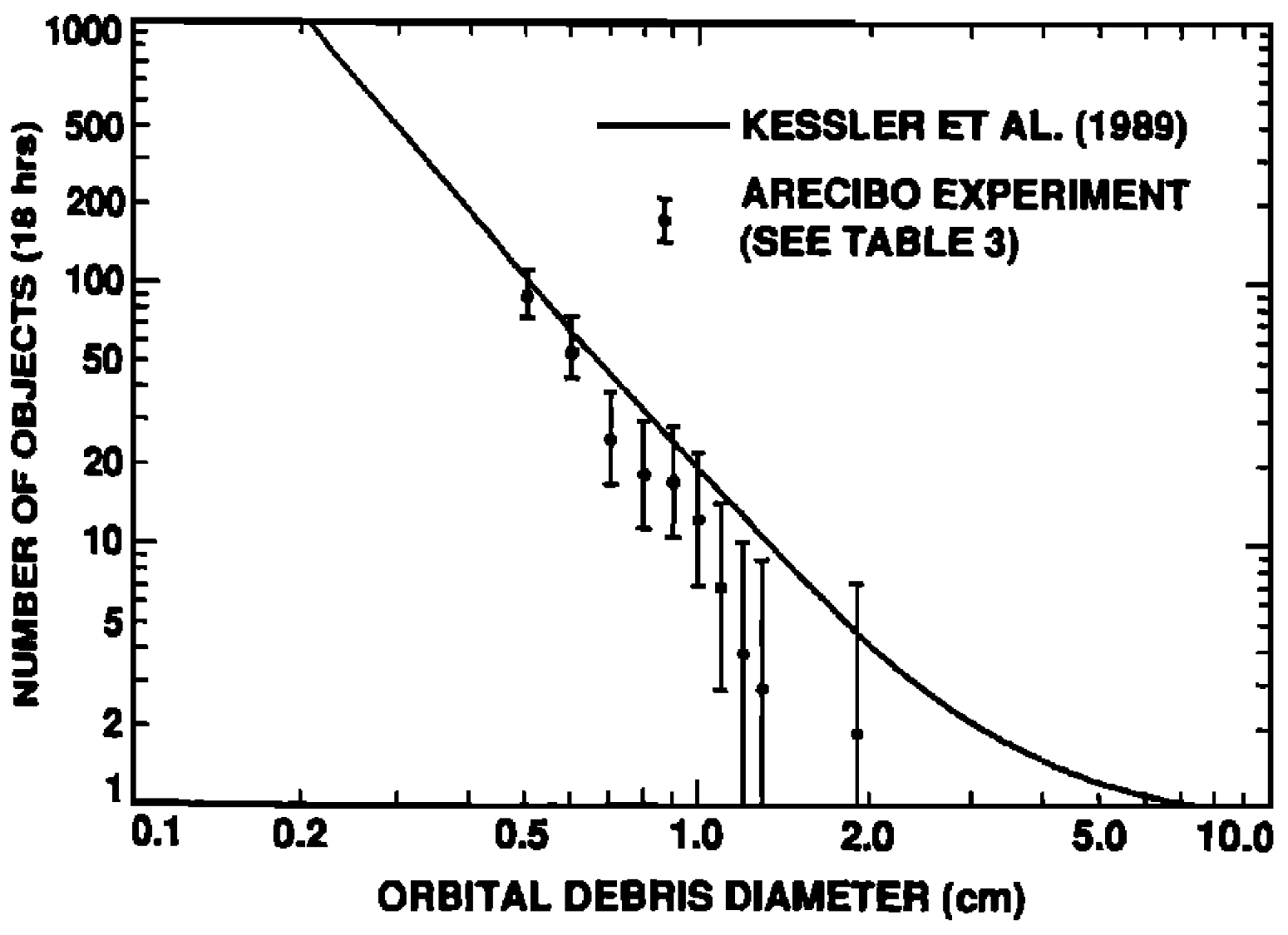
3.3. Arecibo Observatory
3.4. BIRALES
3.5. BIRALET
3.6. Italian Multibistatic Radar
3.7. Long Baseline Bistatic Radar (LBBR)
3.8. MeerKAT
4. Radio Telescope Measurements with Illuminators of Opportunity
4.1. Murchison Widefield Array
4.2. LOFAR
5. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ISS | International Space Station |
| LEO | Low Earth Orbit |
| SSA | Space Situational Awareness |
| SST | Space Surveillance and Tracking |
| SSN | Space Surveillance Network |
| TLE | Two Line Element |
| LIDAR | Light Detection and Ranging |
| TIRA | Tracking and Imaging Radar |
| MWA | Murchison Widefield Array |
| RCS | Radar Cross-Section |
| SKA | Square Kilometer Array |
| VLBI | Very Long Baseline Interferometry |
| BIRALES | Bistatic Radar for LEO Survey |
| BIRALET | Bistatic Radar for LEO Tracking |
| SRT | Sardinia Radio Telescope |
| STO | Science and Technology Organization |
| GEO | Geostationary Earth Orbit |
| GESTRA | German Experimental Space Surveillance and Tracking Radar |
| NGAT | Next Generation Arecibo Telescope |
| TRF | Radio Frequency Transmitter |
| IOD | Initial Orbit Determination |
| CW | Continuous Wave |
| UKF | Unscented Kalman Filter |
| ECEF | Earth Centred Earth Fixed |
| NEO | Near-Earth Objects |
| PRIDE | Planetary Radio Interferometry and Doppler Experiment |
| LBBR | Long Baseline Bistatic Radar |
| RTG | Research Task Group |
| MHR | Millstone Hill Radar |
| WSRT | Westerbork Synthesis Radio Telescope |
| E merlin | enhanced MultiElement Remotely Linked Interferometer Network |
| MIMO | Multi Input Multi Output |
| MeerKAT | Meer Karoo Array Telescope |
| RRSG | Radar Remote Sensing Group |
| MPT | Mission Planning Tool |
| FERS | Flexible Extensible Radar Simulator |
| SIMO | Single-Input–Multiple-Output |
| ISAR | Inverse Synthetic Aperture Radar |
| ODBD | Orbit Determination Before Detect |
| CAF | Cross-Ambiguity Function |
| DPI | Direct Path Interference |
References
- Klinkrad, H.; Beltrami, P.; Hauptmann, S.; Martin, C.; Sdunnus, H.; Stokes, H.; Walker, R.; Wilkinson, J. The ESA space debris mitigation handbook 2002. Adv. Space Res. 2004, 34, 1251–1259. [Google Scholar] [CrossRef]
- Kessler, D.J.; Johnson, N.L.; Liou, J.; Matney, M. The kessler syndrome: Implications to future space operations. Adv. Astronaut. Sci. 2010, 137, 2010. [Google Scholar]
- Gasparini, G.; Miranda, V. Space Situational Awareness: An Overview; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Hu, Y.; Li, K.; Liang, Y.; Chen, L. Review on strategies of space-based optical space situational awareness. J. Syst. Eng. Electron. 2021, 32, 1152–1166. [Google Scholar]
- Vallado, D.A.; Griesbach, J.D. Simulating space surveillance networks. In Proceedings of the Paper AAS 11-580 presented at the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, Alaska, 31 July–4 August 2011. [Google Scholar]
- Weeden, B.; Cefola, P.; Sankaran, J. Global space situational awareness sensors. In Proceedings of the AMOS Conference, Maui, HI, USA, 14–17 September 2010. [Google Scholar]
- Vallado, D.; Crawford, P. SGP4 orbit determination. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, Hawai, USA, 18–21 August 2008; p. 6770. [Google Scholar]
- Mehrholz, D. Radar observations in low earth orbit. Adv. Space Res. 1997, 19, 203–212. [Google Scholar] [CrossRef]
- Wilden, H.; Bekhti, N.B.; Hoffmann, R.; Kirchner, C.; Kohlleppel, R.; Reising, C.; Brenner, A.; Eversberg, T. GESTRA-recent progress, mode design and signal processing. In Proceedings of the 2019 IEEE International Symposium on Phased Array System & Technology (PAST), Waltham, MA, USA, 15–18 October 2019; pp. 1–8. [Google Scholar]
- Bennet, F.; Rigaut, F.; Ritchie, I.; Smith, C. Adaptive Optics to Enhance Tracking of Space Debris; SPIE: Canberra, Australia, 2014; Volume 9148, p. 91481F. [Google Scholar]
- Sajjad, N.; Mirshams, M.; Hein, A.M. Spaceborne and ground-based sensor collaboration: Advancing resident space objects’ orbit determination for space sustainability. Astrodynamics 2024, 8, 325–347. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Q. The application of lidar in detecting space debris. In Proceedings of the 2008 International Conference on Optical Instruments and Technology: Optoelectronic Measurement Technology and Applications, Beijing, China, 16–19 November 2009; Volume 7160, pp. 464–470. [Google Scholar]
- Muntoni, G.; Schirru, L.; Pisanu, T.; Montisci, G.; Valente, G.; Gaudiomonte, F.; Serra, G.; Urru, E.; Ortu, P.; Fanti, A. Space debris detection in low Earth orbit with the Sardinia radio telescope. Electronics 2017, 6, 59. [Google Scholar] [CrossRef]
- Kraus, J.D.; Tiuri, M.; Räisänen, A.V.; Carr, T.D. Radio Astronomy; McGraw-Hill: New York, NY, USA, 1966; Volume 66. [Google Scholar]
- Muntoni, G.; Montisci, G.; Pisanu, T.; Andronico, P.; Valente, G. Crowded space: A review on radar measurements for space debris monitoring and tracking. Appl. Sci. 2021, 11, 1364. [Google Scholar] [CrossRef]
- Letsch, R.; Leushacke, L.; Rosebrock, J.; Jehn, R.; Krag, H.; Keller, R. First Results from the Multibeam Bistatic Beampark Experiment at FGAN. In Proceedings of the 5th European Conference on Space Debris, Darmstadt, Germany, 30 March–2 April 2009; Volume 33. [Google Scholar]
- Hennessy, B.; Rutten, M.; Young, R.; Tingay, S.; Summers, A.; Gustainis, D.; Crosse, B.; Sokolowski, M. Establishing the capabilities of the Murchison Widefield Array as a passive radar for the surveillance of space. Remote Sens. 2022, 14, 2571. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to radar. Radar Handb. 1962, 2, 21. [Google Scholar]
- Markiewicz, T.G.; Wesołowski, K.W. Cryogenic Cooling in Wireless Communications. Entropy 2019, 21, 832. [Google Scholar] [CrossRef]
- Willis, N.J. Bistatic Radar; SciTech Publishing: Raleigh, NC, USA, 2005; Volume 2. [Google Scholar]
- Henry, J.K.; Narayanan, R.M.; Singla, P. Radar Cross-Section Modeling of Space Debris. In Proceedings of the International Conference on Dynamic Data Driven Applications Systems, Cambridge, MA, USA, 6–10 October 2022; pp. 81–94. [Google Scholar]
- Matney, M.; Goldstein, R.; Kessler, D.; Stansbery, E. Recent results from Goldstone orbital debris radar. Adv. Space Res. 1999, 23, 5–12. [Google Scholar] [CrossRef]
- Thompson, T.W.; Goldstein, R.M.; Campbell, D.B.; Stansbery, E.G.; Potter, A.E. Radar detection of centimeter-sized orbital debris: Preliminary Arecibo observations at 12.5-CM wavelength. Geophys. Res. Lett. 1992, 19, 257–259. [Google Scholar] [CrossRef]
- Pupillo, G.; Bartolini, M.; Cevolani, G.; Di Martino, M.; Falkovich, I.; Konovalenko, A.; Malevinskij, S.; Montebugnoli, S.; Nabatov, A.; Pluchino, S.; et al. Space debris observational test with the Medicina-Evpatoria bistatic radar. Mem. Della Soc. Astron. Ital. 2008, 12, 44. [Google Scholar]
- Pisanu, T.; Schirru, L.; Urru, E.; Maxia, P. Status of the Sardinia Radio Telescope as a Receiver of the BIRALET bi-Static Radar for Space Debris Observations. In Proceedings of the Ground-Based and Airborne Telescopes VIII, SPIE, Online, 14–18 December 2020; Volume 11445, pp. 1310–1325. [Google Scholar]
- Pisanu, T.; Muntoni, G.; Schirru, L.; Ortu, P.; Urru, E.; Montisci, G. Recent advances of the BIRALET system about space debris detection. Aerospace 2021, 8, 86. [Google Scholar] [CrossRef]
- Cataldo, D.; Gentile, L.; Ghio, S.; Giusti, E.; Tomei, S.; Martorella, M. Multibistatic radar for space surveillance and tracking. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 14–30. [Google Scholar] [CrossRef]
- Gentile, L.; Martorella, M. LEO RSO Initial Orbit Determination using Range-only Multi-Bistatic Radar measurements. In Proceedings of the 2018 SpaceOps Conference, Marseille, France, 28 May–1 June 2018; p. 2717. [Google Scholar]
- Ghio, S.; Martorella, M.; Staglianò, D.; Petri, D.; Lischi, S.; Massini, R. Experimental comparison of radon domain approaches for resident space object’s parameter estimation. Sensors 2021, 21, 1298. [Google Scholar] [CrossRef]
- Welch, S.; Hogan, G.; Morrison, R.; Bassa, C.; Pisanu, T. Long baseline radar bistatic measurements of geostationary satellites. In Proceedings of the 2022 19th European Radar Conference (EuRAD), Milan, Italy, 28–30 September 2022; pp. 1–4. [Google Scholar]
- Li, J.; Gao, P.; Shen, M.; Zhao, Y. The capability analysis of the bistatic radar system based on Tianlai radio array for space debris detection. Adv. Space Res. 2019, 64, 1652–1661. [Google Scholar] [CrossRef]
- Henault, S.; Guimond, J.F. Orbit determination of a LEO satellite with passive RF observation of a single pass by two collocated antennas. Adv. Space Res. 2025, 75, 5014–5025. [Google Scholar] [CrossRef]
- Klare, J.; Behner, F.; Carloni, C.; Cerutti-Maori, D.; Fuhrmann, L.; Hoppenau, C.; Karamanavis, V.; Laubach, M.; Marek, A.; Perkuhn, R.; et al. The Future of Radar Space Observation in Europe—Major Upgrade of the Tracking and Imaging Radar (TIRA). Remote Sens. 2024, 16, 4197. [Google Scholar] [CrossRef]
- Mehrholz, D.; Leushacke, L.; Jehn, R. The COBEAM-1/96 experiment. Adv. Space Res. 1999, 23, 23–32. [Google Scholar] [CrossRef]
- Ruiz, G.; Leushacke, L.; Jehn, R.; Keller, R. Improved FGAN/MPIFR bi-static debris observation campaign: Experiment outline, analysis algorithms and first results. In Proceedings of the 57th International Astronautical Congress, Valencia, Spain, 2–6 October 2006; p. B6–1. [Google Scholar]
- Flegel, S.; Letsch, K.; Krag, H. Theoretical analysis of south-staring Beampark configurations for the TIRA system. CEAS Space J. 2015, 7, 375–387. [Google Scholar] [CrossRef]
- Ruiz, G.; Leushacke, L.; Rosebrock, J. Algorithms for multi-beam receiver data analysis. In Proceedings of the 4th European Conference on Space Debris, Darmstadt, Germany, 18–20 April 2005; Volume 587, p. 89. [Google Scholar]
- Letsch, K.; Leushacke, L.; Rosebrock, J.; Krag, H.; Keller, R. Validation of revised multibeam estimation algorithms with data from TIRA/Effelsberg bistatic beampark experiments. In Proceedings of the 6th European Conference on Space Debris, Darmstadt, Germany, 22–25 April 2013; Volume 723, p. 126. [Google Scholar]
- Manis, A.; Arnold, J.A.; Murray, J.; Buckalew, B.; Cruz, C.; Matney, M. An Overview of Ground-based Radar and Optical Measurements Utilized by the NASA Orbital Debris Program Office. In Proceedings of the 2nd International Orbital Debris Conference (IOC II), Houston, TX, USA, 4–7 December 2023. [Google Scholar]
- Stokely, C.; Stansbery, E.; Goldstein, R. Debris flux comparisons from the Goldstone Radar, Haystack Radar, and Hax Radar prior, during, and after the last solar maximum. Adv. Space Res. 2009, 44, 364–370. [Google Scholar] [CrossRef]
- Murray, J.; Miller, R.; Matney, M.; Anz-Meador, P.; Kennedy, T. Recent results from the goldstone orbital debris radar: 2016–2017. In Proceedings of the International Orbital Debris (IOC) Conference, Sugar Land, TX, USA, 9–12 December 2019. [Google Scholar]
- Murray, J.; Jenet, F. The arecibo observatory as an instrument for investigating orbital debris: Legacy and next generation performance. Planet. Sci. J. 2022, 3, 52. [Google Scholar] [CrossRef]
- Pisanu, T.; Schirru, L.; Urru, E.; Gaudiomonte, F.; Ortu, P.; Bianchi, G.; Bortolotti, C.; Roma, M.; Muntoni, G.; Montisci, G.; et al. Upgrading the Italian BIRALES system to a pulse compression radar for space debris range measurements. In Proceedings of the 2018 22nd International Microwave and Radar Conference (MIKON), Poznan, Poland, 14–17 May 2018; pp. 317–320. [Google Scholar] [CrossRef]
- Losacco, M.; Di Lizia, P.; Massari, M.; Naldi, G.; Pupillo, G.; Bianchi, G.; Siminski, J. Initial orbit determination with the multibeam radar sensor BIRALES. Acta Astronaut. 2020, 167, 374–390. [Google Scholar] [CrossRef]
- Bianchi, G.; Montaruli, M.F.; Roma, M.; Mariotti, S.; Di Lizia, P.; Maccaferri, A.; Facchini, L.; Bortolotti, C.; Minghetti, R. A new concept of transmitting antenna on bi-static radar for space debris monitoring. In Proceedings of the 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, Maldives, 16–18 November 2022. [Google Scholar] [CrossRef]
- Di Lizia, P.; Massari, M.; Losacco, M.; Bianchi, G.; Mattana, A.; Pupillo, G.; Bortolotti, C.; Roma, M.; Morselli, A.; Armellin, R.; et al. Performance assessment of the multibeam radar sensor birales for space surveillance and tracking. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017. [Google Scholar]
- Montaruli, M.F.; De Luca, M.A.; Massari, M.; Bianchi, G.; Magro, A. Operational Angular Track Reconstruction in Space Surveillance Radars through an Adaptive Beamforming Approach. Aerospace 2024, 11, 451. [Google Scholar] [CrossRef]
- Podda, A.; Casu, S.; Coppola, A.; Protopapa, F.; Sergiusti, A.L.; Pisanu, T.; Urru, E.; Schirru, L.; Ortu, P.; Gaudiomonte, F.; et al. Exploitation of bi-static radar architectures for LEO Space Debris surveying and tracking: The BIRALES/BlRALET project. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Facchini, L.; Montaruli, M.F.; Di Lizia, P.; Massari, M.; Pupillo, G.; Naldi, G.; Bianchi, G. Resident space object track reconstruction using a multireceiver radar system. In Proceedings of the 8th European Conference on Space Debris, ESA/ESOC, Darmstadt, Germany, 20–23 April 2021; pp. 1–8. [Google Scholar]
- Montaruli, M.; Facchini, L.; Lizia, P.D.; Massari, M.; Pupillo, G.; Bianchi, G.; Naldi, G. Adaptive track estimation on a radar array system for space surveillance. Acta Astronaut. 2022, 198, 111–123. [Google Scholar] [CrossRef]
- Losacco, M.; Di Lizia, P.; Mauro, M.; Bianchi, G.; Pupillo, G.; Mattana, A.; Naldi, G.; Bortolotti, C.; Roma, M.; Schiaffino, M.; et al. The multibeam radar sensor BIRALES: Performance assessment for space surveillance and tracking. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar]
- Muciaccia, A.; Facchini, L.; Montaruli, M.F.; Purpura, G.; Detomaso, R.; Colombo, C.; Massari, M.; Di Lizia, P.; Di Cecco, A.; Salotti, L.; et al. Observation and analysis of Cosmos 1408 fragmentation. In Proceedings of the 73rd International Astronautical Congress (IAC 2022), Paris, France, 18–22 September 2022. [Google Scholar]
- Montaruli, M.F.; Facchini, L.; Faraco, N.; Di Lizia, P.; Massari, M.; Bianchi, G.; Bortolotti, C.; Maccaferri, A.; Roma, M.; Peroni, M.; et al. Third Long-March 5B re-entry campaign through Italian space surveillance radars. Adv. Space Res. 2025, 75, 2139–2155. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No. 00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Cutajar, D.; Magro, A.; Borg, J.; Adami, K.; Bianchi, G.; Pupillo, G.; Mattana, A.; Naldi, G.; Bortolotti, C.; Perini, F.; et al. PyBIRALES: A Radar Data Processing Backend for the Real-Time Detection of Space Debris. J. Astron. Instrum. 2020, 9, 2050003. [Google Scholar] [CrossRef]
- De Luca, M.; Demuru, R.; Sangaletti, G.; Mesiano, L.; Boreanaz, I. The new transmitting antenna for BIRALES. In Aeronautics and Astronautics: AIDAA XXVII International Congress; Materials Research Forum LLC: Millersville, PA, USA, 2023; Volume 37, p. 474. [Google Scholar]
- Schirru, L.; Muntoni, G.; Pisanu, T.; Urru, E.; Valente, G.; Gaudiomonte, F.; Ortu, P.; Melis, A.; Concu, R.; Bianchi, G.; et al. Upgrading the Sardinia Radio Telescope to a Bistatic Tracking Radar for Space Debris. In Proceedings of the 1st IAA Space Situational Awareness Conference, Orlando, FL, USA, 13–15 November 2017. [Google Scholar]
- Schirru, L.; Pisanu, T.; Navarrini, A.; Urru, E.; Gaudiomonte, F.; Ortu, P.; Montisci, G. Advantages of using a C-band Phased Array Feed as a receiver in the Sardinia Radio Telescope for Space Debris monitoring. In Proceedings of the 2019 IEEE 2nd Ukraine Conference on Electrical and Computer Engineering (UKRCON), Lviv, Ukraine, 2–6 July 2019; pp. 133–136. [Google Scholar]
- Ahuja, B.; Gentile, L.; Marotrella, M. Improving Satellite Position And Velocity Calculation During Low Thrust Maneuvers Using Multi-Bistatic Radar And Unscented Kalman Filter. In Proceedings of the 4th IAA Space Situational Awareness Conference, Daytona Beach, FL, USA, 8–10 May 2024. [Google Scholar]
- Pupillo, G.; Righini, S.; Orosei, R.; Bortolotti, C.; Maccaferri, G.; Roma, M.; Mastrogiuseppe, M.; Pisanu, T.; Schirru, L.; Cicalò, S.; et al. Toward a European Facility for Ground-Based Radar Observations of Near-Earth Objects. Remote Sens. 2023, 16, 38. [Google Scholar] [CrossRef]
- Gurvits, L.I.; Cimò, G.; Dirkx, D.; Pallichadath, V.; Akins, A.; Altobelli, N.; Bocanegra-Bahamon, T.M.; Cazaux, S.M.; Charlot, P.; Duev, D.A.; et al. Planetary radio interferometry and Doppler experiment (PRIDE) of the JUICE mission. Space Sci. Rev. 2023, 219, 79. [Google Scholar] [CrossRef]
- Welch, S.; Hogan, G.; Cerutti-Maori, D.; Garrington, S.; Morrison, R.; Otten, M.; Bassa, C.; Pallecaros, N.; van Dorp, P.; Harrison, P.; et al. Long Baseline Bistatic Radar for Space Situational Awareness. In Proceedings of the NATO SET-SCI-297 Specialists’ Meeting on Space Sensors and Space Situational Awareness, Interlaken, Switzerland, 10–11 October 2022. [Google Scholar]
- Früh, C.; Schildknecht, T. Accuracy of two-line-element data for geostationary and high-eccentricity orbits. J. Guid. Control. Dyn. 2012, 35, 1483–1491. [Google Scholar] [CrossRef]
- Serrano, A.; Kobsa, A.; Uysal, F.; Cerutti-Maori, D.; Ghio, S.; Kintz, A.; Morrison, R.L., Jr.; Welch, S.; van Dorp, P.; Hogan, G.; et al. Long baseline bistatic radar imaging of tumbling space objects for enhancing space domain awareness. IET Radar Sonar Navig. 2024, 18, 598–619. [Google Scholar] [CrossRef]
- Bosma, D.A.; Uysal, F. First Results of Attitude Estimation Using RCS Time Series for Space Domain Awareness. In Proceedings of the 2024 IEEE Radar Conference (RadarConf24), Denver, CO, USA, 6–10 May 2024; pp. 1–6. [Google Scholar]
- Uysal, F.; Van Dorp, P.; Serrano, A.; Kobsa, A.; Ghio, S.; Kintz, A.; Bassa, C.; Garrington, S.; Cuenca, M.C.; Otten, M.; et al. Large baseline bistatic radar imaging for space domain awareness. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6–10 November 2023; pp. 1–6. [Google Scholar]
- Kintz, A.; Hogan, G.; Kobsa, A.; Garrington, S.; Serrano, A.; Welch, S.; Morrison, R.; Ghio, S.; Bassa, C.; Harrison, P.; et al. Bistatic Radar for Military Space Domain Awareness at Geosynchronous Orbits. In Proceedings of the NATO SET-311 10th Military Sensing Symposium, London, UK, 19–21 April 2023. [Google Scholar]
- Serrano, A.; Capper, J.; Morrison, R.L., Jr.; Abouzahra, M.D. Range-Doppler-Time Tensor Processing for Deep-Space Satellite Characterization Using Narrowband Radar. Remote Sens. 2024, 16, 1374. [Google Scholar] [CrossRef]
- Díaz Riofrío, S.; Da Graça Marto, S.; Ilioudis, C.; Vasile, M.; Clemente, C. Performance analysis of ground-based long baseline radar distributed systems for space situational awareness. IET Radar Sonar Navig. 2024, 18, 586–597. [Google Scholar] [CrossRef]
- Dhondea, A.R. Mission Planning Tool for Space Debris Studies with the MeerKAT Radar. Ph.D. Thesis, University of Cape Town, Engineering and the Built Environment, Department of Electrical Engineering, Cape Town, South Africa, 2018. [Google Scholar]
- Agaba, D. System Design of the MeerKAT L-Band 3D Radar for Monitoring Near Earth Objects. Ph.D. Thesis, University of Cape Town, Faculty of Engineering & the Built Environment, Department of Electrical Engineering, Cape Town, South Africa, 2017. [Google Scholar]
- Brooker, M. The Design and Implementation of a Simulator for Multistatic Radar Systems. 2008. Available online: http://hdl.handle.net/11427/5253 (accessed on 29 April 2025).
- Dhondea, A.; Inggs, M. Mission planning tool for space debris detection and tracking with the MeerKAT radar. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- O’Hagan, D.W.; Griffiths, H.D.; Ummenhofer, S.M.; Paine, S.T. Elevation pattern analysis of common passive bistatic radar illuminators of opportunity. IEEE Transactions Aerosp. Electron. Syst. 2017, 53, 3008–3019. [Google Scholar] [CrossRef]
- Lonsdale, C.J.; Cappallo, R.J.; Morales, M.F.; Briggs, F.H.; Benkevitch, L.; Bowman, J.D.; Bunton, J.D.; Burns, S.; Corey, B.E.; DeSouza, L.; et al. The murchison widefield array: Design overview. Proc. IEEE 2009, 97, 1497–1506. [Google Scholar] [CrossRef]
- Tingay, S.J.; Goeke, R.; Bowman, J.D.; Emrich, D.; Ord, S.M.; Mitchell, D.A.; Morales, M.F.; Booler, T.; Crosse, B.; Wayth, R.B.; et al. The Murchison widefield array: The square kilometre array precursor at low radio frequencies. Publ. Astron. Soc. Aust. 2013, 30, e007. [Google Scholar] [CrossRef]
- McKinley, B.; Briggs, F.; Kaplan, D.L.; Greenhill, L.; Bernardi, G.; Bowman, J.D.; de Oliveira-Costa, A.; Tingay, S.J.; Gaensler, B.M.; Oberoi, D.; et al. Low-frequency observations of the Moon with the Murchison widefield array. Astron. J. 2012, 145, 23. [Google Scholar] [CrossRef]
- Palmer, J.E.; Hennessy, B.; Rutten, M.; Merrett, D.; Tingay, S.; Kaplan, D.; Tremblay, S.; Ord, S.M.; Morgan, J.; Wayth, R.B. Surveillance of Space using passive radar and the Murchison Widefield Array. In Proceedings of the 2017 IEEE radar conference (Radarconf), Seattle, WA, USA, 8–12 May 2017; pp. 1715–1720. [Google Scholar]
- Palmer, J.E.; Harms, H.A.; Searle, S.J.; Davis, L. DVB-T passive radar signal processing. IEEE Trans. Signal Process. 2012, 61, 2116–2126. [Google Scholar] [CrossRef]
- Tingay, S.J.; Kaplan, D.L.; McKinley, B.; Briggs, F.; Wayth, R.B.; Hurley-Walker, N.; Kennewell, J.; Smith, C.; Zhang, K.; Arcus, W.; et al. On the detection and tracking of space debris using the Murchison Widefield Array. I. Simulations and test observations demonstrate feasibility. Astron. J. 2013, 146, 103. [Google Scholar] [CrossRef]
- Hennessy, B.; Rutten, M.; Tingay, S.; Young, R. Orbit determination before detect: Orbital parameter matched filtering for uncued detection. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 889–894. [Google Scholar]
- Hennessy, B.; Tingay, S.; Young, R.; Rutten, M.; Crosse, B.; Hancock, P.; Sokolowski, M.; Johnston-Hollitt, M.; Kaplan, D.L. Uncued detection and initial orbit determination from short observations with the Murchison Widefield array. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 16–30. [Google Scholar] [CrossRef]
- Prabu, S.; Hancock, P.; Zhang, X.; Tingay, S.J.; Hodgson, T.; Crosse, B.; Johnston-Hollitt, M. Improved sensitivity for space domain awareness observations with the murchison widefield array. Adv. Space Res. 2022, 70, 812–824. [Google Scholar] [CrossRef]
- Prabu, S.; Hancock, P.; Zhang, X.; Tingay, S.J. A low-frequency blind survey of the low Earth orbit environment using non-coherent passive radar with the Murchison widefield array. Publ. Astron. Soc. Aust. 2020, 37, e052. [Google Scholar] [CrossRef]
- Prabu, S.; Hancock, P.J.; Zhang, X.; Tingay, S.J. The development of non-coherent passive radar techniques for space situational awareness with the Murchison Widefield Array. Publ. Astron. Soc. Aust. 2020, 37, e010. [Google Scholar] [CrossRef]
- Prabu, S.; Hancock, P.; Zhang, X.; Tingay, S. Demonstration of orbit determination for LEO objects using the Murchison Widefield Array. Adv. Space Res. 2023, 72, 3282–3296. [Google Scholar] [CrossRef]
- de Vos, M.; Gunst, A.W.; Nijboer, R. The LOFAR telescope: System architecture and signal processing. Proc. IEEE 2009, 97, 1431–1437. [Google Scholar] [CrossRef]
- Heald, G.; McKean, J.; Pizzo, R. Low Frequency Radio Astronomy and the LOFAR Observatory; Springer: Berlin/Heidelberg, Germany, 2018; Volume 10, pp. 978–983. [Google Scholar]
- Kłos, J.; Droszcz, A.; Jędrzejewski, K.; Kulpa, K.; Pożoga, M. On the possibility of using LOFAR radio telescope for passive radiolocation. In Proceedings of the 2020 21st International Radar Symposium (IRS), Warsaw, Poland, 5–8 October 2020; pp. 73–76. [Google Scholar]
- Malanowski, M.; Jędrzejewski, K.; Misiurewicz, J.; Kulpa, K.; Gromek, A.; Kłos, J.; Droszcz, A.; Pożoga, M. Passive radar based on LOFAR radio telescope for air and space target detection. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar]
- Kłos, J.; Jędrzejewski, K.; Droszcz, A.; Kulpa, K.; Pożoga, M.; Misiurewicz, J. Experimental Verification of the Concept of Using LOFAR Radio-Telescopes as Receivers in Passive Radiolocation Systems. Sensors 2021, 21, 2043. [Google Scholar] [CrossRef]
- Jędrzejewski, K.; Malanowski, M.; Kulpa, K.; Pożoga, M. Experimental verification of passive radar space object detection with a single low-frequency array radio telescope. IET Radar Sonar Navig. 2024, 18, 68–77. [Google Scholar] [CrossRef]
- Jędrzejewski, K.; Malanowski, M.; Kulpa, K.; Pożoga, M. First experimental trials of passive DVB-T based space object detection with a single LOFAR radio telescope. In Proceedings of the International Conference on Radar Systems (RADAR 2022), Edinburgh, UK, 24–27 October 2022. [Google Scholar]
- Jędrzejewski, K.; Pożoga, M.; Modrzewski, A.; Karwacki, M.; Kulpa, K.; Rothkaehl, H. Bistatic Detection of LEO Satellites from Very Long Distances Using LOFAR Radio Telescope. In Proceedings of the 2024 International Radar Symposium (IRS), Wroclaw, Poland, 2–4 July 2024; pp. 402–407. [Google Scholar]
- Jędrzejewski, K.; Kulpa, K.; Malanowski, M.; Pożoga, M.; Wójtowicz, P. Exploring the Feasibility of Detecting LEO Space Objects in Passive Radar Without Prior Orbit Parameter Information. In Proceedings of the 2024 IEEE Radar Conference (RadarConf24), Denver, CO, USA, 6–10 May 2024; pp. 1–6. [Google Scholar]
- Jedrzejewski, K.; Pozoga, M.; Wojtowicz, P.; Malanowski, M.; Kulpa, K.; Rothkaehl, H. Passive Observation of Starlink Satellites Using LOFAR Radio Telescope. In Proceedings of the 2024 International Radar Symposium (IRS), Wroclaw, Poland, 2–4 July 2024; pp. 408–413. [Google Scholar]
- De Maio, A.; Maffei, M.; Aubry, A.; Farina, A. Effects of plasma media with weak scintillation on the detection performance of spaceborne radars. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13. [Google Scholar] [CrossRef]
- Maffei, M.; Aubry, A.; De Maio, A.; Farina, A. Spaceborne radar sensor architecture for debris detection and tracking. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6621–6636. [Google Scholar] [CrossRef]
- Maffei, M.; Aubry, A.; De Maio, A.; Farina, A. Emerging Trends in Radar: Spaceborne Radar for Surveillance. IEEE Aerosp. Electron. Syst. Mag. 2025, 1–4. [Google Scholar] [CrossRef]
- Anger, S.; Jirousek, M.; Dill, S.; Peichl, M. IoSiS—A high performance experimental imaging radar for space surveillance. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–4. [Google Scholar]
- Hochberg, F.; Jirousek, M.; Anger, S.; Peichl, M. Expanding Imaging of Satellites in Space (IoSiS): A Feasibility Study on the 3-Dimensional Imaging of Satellites Using Interferometry and Tomography. Electronics 2024, 13, 4914. [Google Scholar] [CrossRef]
- Thindlu Rudrappa, M.; Albrecht, M.; Knott, P. Characterisation of resident space objects using multistatic interferometric inverse synthetic aperture radar imaging. IET Radar Sonar Navig. 2024, 18, 620–634. [Google Scholar] [CrossRef]
- Griffith, N.; Lu, E.; Nicolls, M.; Park, I.; Rosner, C. Commercial Space Tracking Services for Small Satellites. In Proceedings of the Small Satellite Conference, Utah State University, Logan, UT, USA, 5–8 August 2019. [Google Scholar]
- Finch, D.; Palmer, J.; Cooper, J.; Oltrogge, D.; Johnson, T. Assessing passive radar for LEO SSA. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 27–30 September 2022. [Google Scholar]
- Dumitrescu, F.; Ceachi, B.; Truică, C.O.; Trăscău, M.; Florea, A.M. A novel deep learning-based relabeling architecture for space objects detection from partially annotated astronomical images. Aerospace 2022, 9, 520. [Google Scholar] [CrossRef]
- Hou, P.; Wang, Z.; Jiang, Y.; Zhu, J.; Chu, Q.; Li, J. Research Advancements in Artificial Intelligence for Space Situational Awareness. In Proceedings of the 2023 13th International Conference on Information Science and Technology (ICIST), Cairo, Egypt, 8–14 December 2023; pp. 568–577. [Google Scholar]
- Massimi, F.; Ferrara, P.; Petrucci, R.; Benedetto, F. Deep learning-based space debris detection for space situational awareness: A feasibility study applied to the radar processing. IET Radar Sonar Navig. 2024, 18, 635–648. [Google Scholar] [CrossRef]
- Caldas, F.; Soares, C. Machine learning in orbit estimation: A survey. Acta Astronaut. 2024, 220, 97–107. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a [km] | e | i [deg] | [deg] | [deg] | |
|---|---|---|---|---|---|
| BIRALES 1 | 6530.3 | 0.020 | 41.5 | 77.4 | 179.6 |
| MFDR-MR | 6533.6 | 0.003 | 41.6 | 82.3 | 158.2 |
| BIRALES 2 | 6517.4 | 0.004 | 41.6 | 82.1 | 172.6 |
| Reference | 6516.1 | 0.002 | 41.6 | 82.8 | 201.0 |
| Object ID | Name | Doppler (Hz) | Altitude (km) | Slant Range (km) | RCS (m2) |
|---|---|---|---|---|---|
| 22565 | COSMOS 2237 (First passage) | not measured | 853.6 | 1732 | 11.6 |
| 22565 | COSMOS 2237 (Second passage) | −5200 | 852.7 | 2836 | 11.6 |
| 33320 | HJ-1A (First passage) | 6200 | 628.7 | 3640 | 1.5 |
| 33320 | HJ-1A (Second passage) | 4600 | 629.3 | 1832 | 1.5 |
| 32783 | CARTOSAT 2A | 5200 | 629.4 | 2056 | 2.3 |
| 13552 | COSMOS 1408 | not measured | 523.7 | 1093 | 8.4 |
| 16206 | COSMOS 1375 | 3400 | 984.8 | 2326 | 0.5 |
| 38047 | VESSELSAT 2 | 5200 | 460.7 | 1664 | 0.3 |
| Name | Country of Origin | Peak Power | Operating Frequency |
|---|---|---|---|
| TIRA | Germany | 1.6 MW | 1.33 GHz |
| Millstone Hill Radar | USA | 3 MW | 1.295 GHz |
| Haystack Radar | USA | 400 kW | 10 GHz |
| Goldstone Radar | USA | 440 kW | 8.56 GHz |
| EISCAT * UHF Radar | Sweden | 2 MW | 930 MHz |
| EISCAT Svalbard Radar (ESR) | Norway | 1 MW | 500 MHz |
| Target | Receiver | TAC | TFAC | STC | SFS | SIRTA | Average |
|---|---|---|---|---|---|---|---|
| Delta-4 | WSRT | 164.2373 | 164.1280 | 164.2228 | 164.1748 | 164.4878 | 164.2501 |
| JBO-KN | 164.0500 | 164.0257 | 164.0103 | 161.3476 | 164.6694 | 164.1889 | |
| JBO-DE | 164.2581 | 164.1588 | 164.2345 | 162.1518 | 164.3632 | 164.2537 | |
| JBO-DA | 164.2790 | 164.2472 | 164.3130 | 162.5722 | 164.9472 | 164.4466 | |
| JBO-CM | 164.1957 | 164.2717 | 164.3948 | 166.5494 | 164.5672 | 164.3573 | |
| Atlas 5 | WSRT | 33.6552 | 33.6567 | 33.6627 | 33.6651 | 33.6490 | 33.6577 |
| TIRA | 33.6388 | 33.6507 | 33.6654 | 33.6221 | 34.8242 | 33.6442 |
| Configuration | Sensors Involved (Tx/Rx) | Country | Configuration | Operating Frequency | Waveform Type | Detection Performance | References |
|---|---|---|---|---|---|---|---|
| TIRA with Effelsberg Radio Telescope | TIRA (Tx), Effelsberg (Rx) | Germany | Active | 1.33 GHz | Pulsed | Targets ≥ 1 cm RCS detectable at 1000 km | [34] |
| Goldstone orbital debris radar | GSSR (Tx), DSS (Rx) | USA | Active | 8.56 GHz | Pulsed | Targets ≥ 3 mm RCS detectable at 1000 km | [22] |
| Arecibo Observatory | Arecibo Telescope (Rx) | USA | Active | 430 MHz | Pulsed | Targets ≥ 5 mm RCS detectable at 1000 km | [23] |
| BIRALES | TRF (Tx), Medicina (Rx) | Italy | Active | 410–415 MHz | CW | Targets ≥ 1 m RCS detectable at 1000 Km | [51] |
| BIRALET | TRF (Tx), SRT (Rx) | Italy | Active | 410–415 MHz | CW | Targets ≥ −8 dBsm RCS detectable at 1000 km | [26] |
| Italian Multibistatic Radar † | Medicina (Rx), NOTO (Rx), SRT (Rx) | Italy | Active | - | - | N.A. | [27] |
| Long baseline bistatic radar † | TIRA (Tx), MHR (Tx), WSRT (Rx), E-Merlin (Rx), SRT (Rx) | Germany, USA, Netherlands, UK, Italy | Active | 1.333 GHz (TIRA), 1.295 GHz (MHR) | Pulsed | Detection at GEO range | [62] |
| MeerKAT † | Denel Dynamics (Tx), MeerKAT (Rx) | South Africa | Interferometer-Active | 1350 MHz | Pulsed | N.A. | [70,73] |
| Murchison Widefield Array (MWA) † | MWA (Rx) | Australia | Interferometer—Passive | 80–300 MHz | Passive (FM broadcast) | Targets ≥ 0.5 m2 RCS detectable at 1000 Km | [17] |
| LOFAR | LOFAR PL160 (Rx) | Poland | Interferometer—Passive | 110–240 MHz | Passive (FM broadcast) | Targets ≥ 0.1 m2 RCS detectable | [91,92] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahuja, B.; Gentile, L.; Kumar, A.; Martorella, M. Role of Radio Telescopes in Space Debris Monitoring: Current Insights and Future Directions. Sensors 2025, 25, 2900. https://doi.org/10.3390/s25092900
Ahuja B, Gentile L, Kumar A, Martorella M. Role of Radio Telescopes in Space Debris Monitoring: Current Insights and Future Directions. Sensors. 2025; 25(9):2900. https://doi.org/10.3390/s25092900
Chicago/Turabian StyleAhuja, Bhaskar, Luca Gentile, Ajeet Kumar, and Marco Martorella. 2025. "Role of Radio Telescopes in Space Debris Monitoring: Current Insights and Future Directions" Sensors 25, no. 9: 2900. https://doi.org/10.3390/s25092900
APA StyleAhuja, B., Gentile, L., Kumar, A., & Martorella, M. (2025). Role of Radio Telescopes in Space Debris Monitoring: Current Insights and Future Directions. Sensors, 25(9), 2900. https://doi.org/10.3390/s25092900