
Flight Trajectory Prediction Based on Automatic Dependent Surveillance-Broadcast Data Fusion with Interacting Multiple Model and Informer Framework


Abstract
1. Introduction
2. Related Work
3. Methodology
3.1. Problem Formulation
3.2. IMM Estimators
3.3. Informer-Based Sequence Prediction
3.4. Hybrid Flight Trajectory Prediction
| Algorithm 1: Hybrid Flight Trajectory Prediction Algorithm |
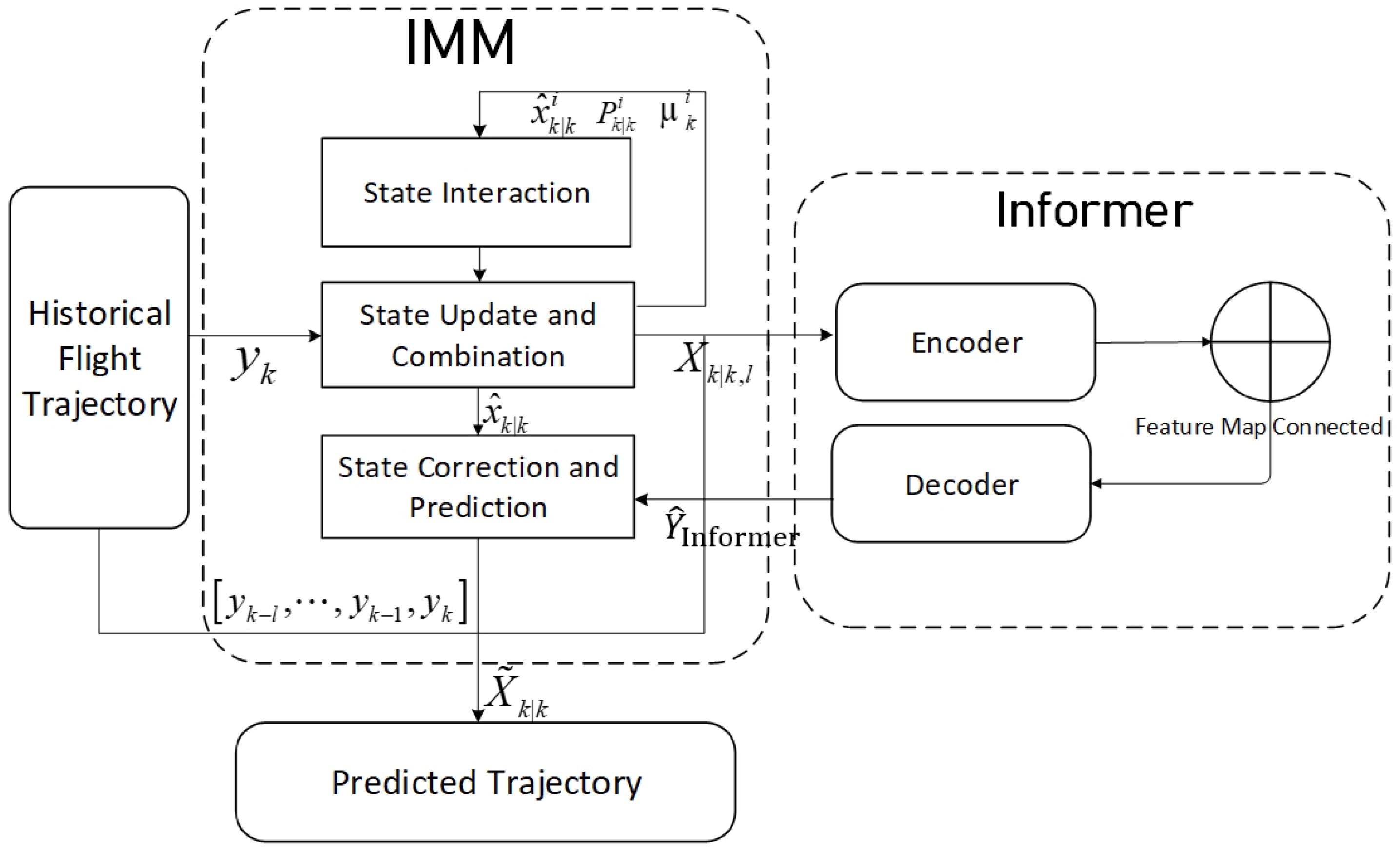
Input the IMM previous estimators: obtain the previous mode-conditioned state estimation , covariance matrices and mode probabilities . The priori transition probability is given as for switching from mode i to mode j. State interaction: Mode-matched prediction update: calculate estimate and covariance . Mode-matched measurement update: calculate . Combination State estimate weighted by updated probabilities: . Sequence feature extraction and error prediction: input the historical data and IMM state prediction, output error sequence with Informer: Encoder: where Decoder generate error prediction: Correction fusion: combine error prediction and IMM estimates : where , Output: return prediction . |
4. Experiments
4.1. Data Acquisition and Preprocessing
4.2. Experimental Setting and Environment
- (1)
- CV Model
- (2)
- CA Model
- (3)
- CT Model
4.3. Evaluation Metrics
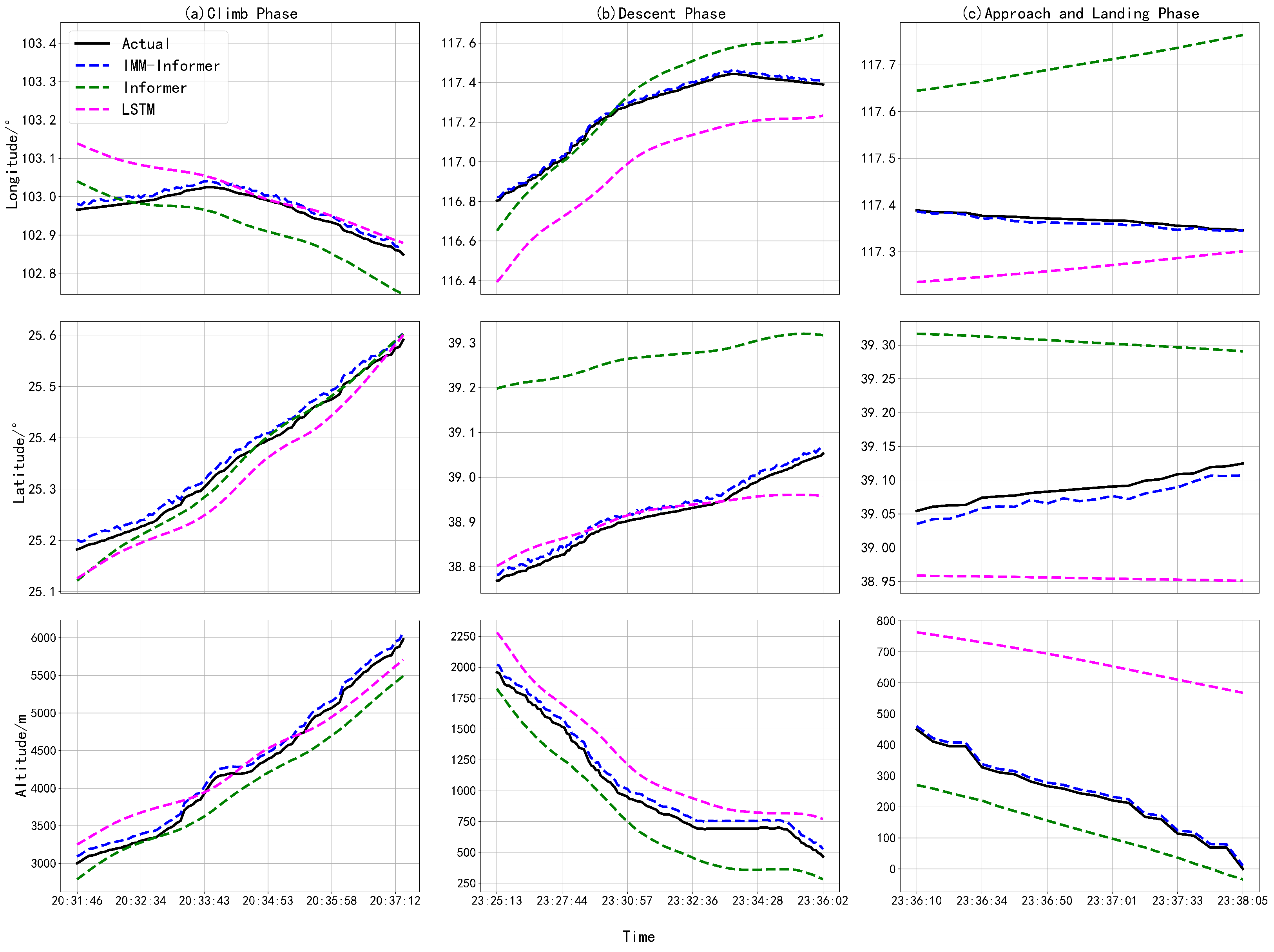
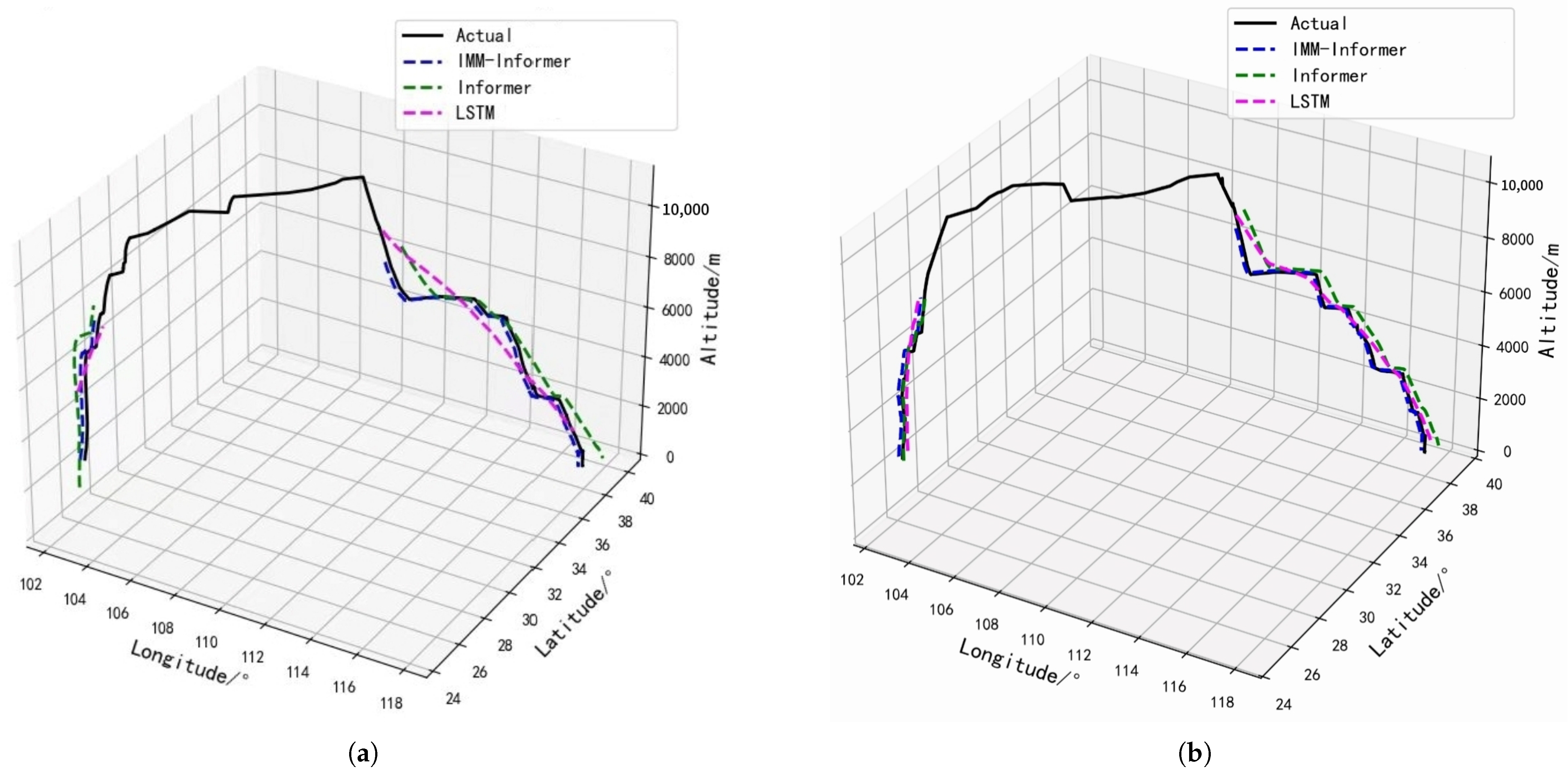
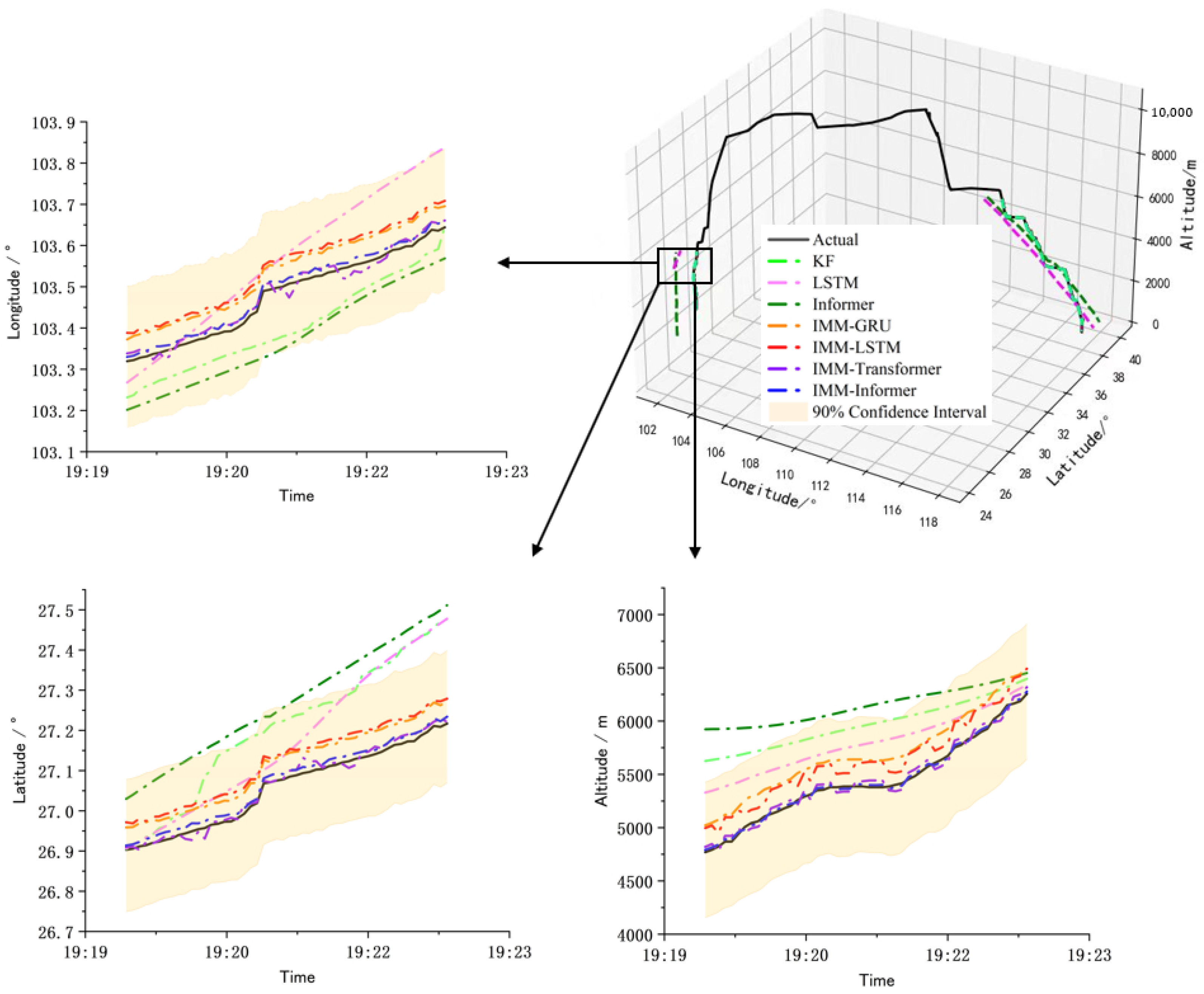
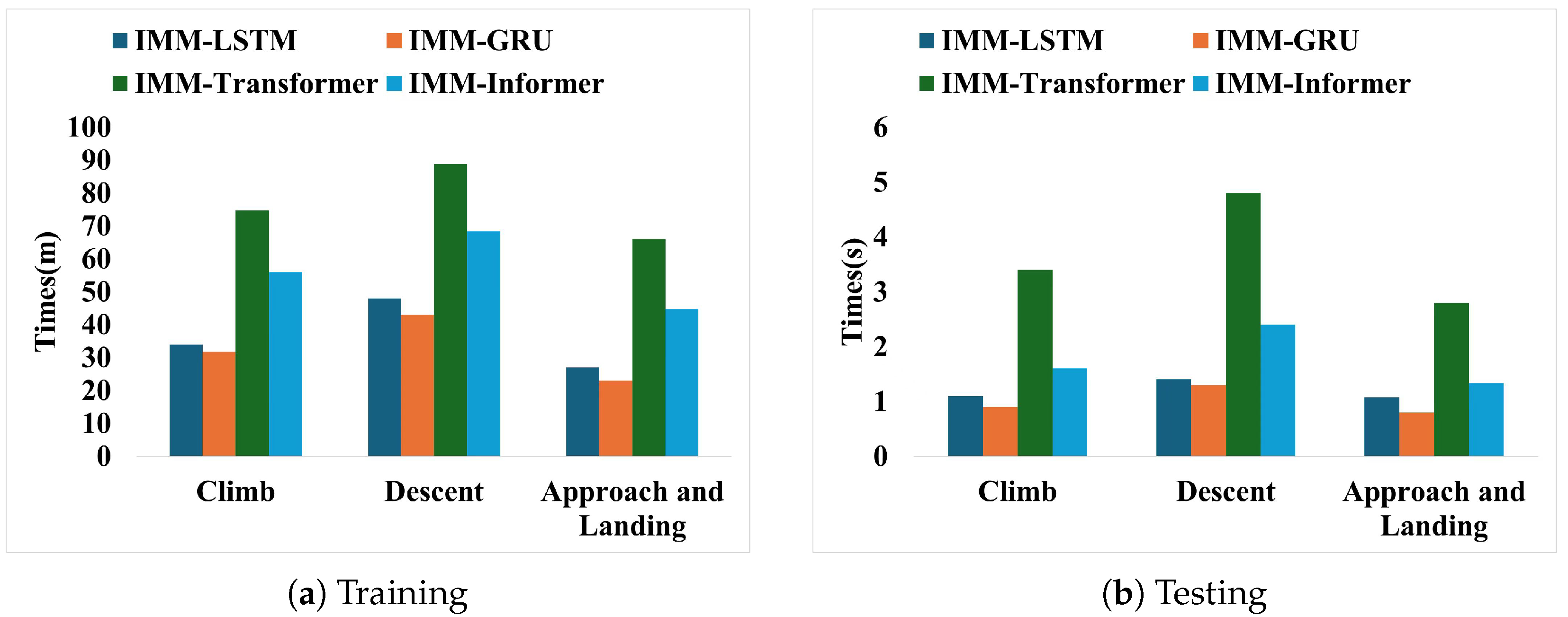
4.4. Experimental Results
5. Discussion
- (1)
- KF: The traditional Kalman filtering method [11] with a single motion model is used for state estimation.
- (2)
- IMM-LSTM: IMM is used for initial state prediction, and LSTM [38] is used for error sequence prediction.
- (3)
- IMM-GRU: IMM is used for initial state prediction, and the Gated Recurrent Unit (GRU) [39] network is used for error sequence prediction.
- (4)
- IMM-Transformer: IMM is used for initial state prediction and Transformer [26] is used for error sequence prediction.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.; Gao, W.; Chen, X.; Liu, T.; Liu, C.; Su, C.; Lu, J.; Wang, W.; Mu, S. Advances of SBAS authentication technologies. Satell. Navig. 2021, 2, 12. [Google Scholar] [CrossRef]
- Kožović, D.V.; Đurđević, D.Ž.; Dinulović, M.R.; Milić, S.; Rašuo, B.P. Air Traffic Modernization and Control: ADS-B System Implementation Update 2022—A Review. FME Trans. 2023, 51, 1. [Google Scholar] [CrossRef]
- Darabseh, A.; Pöpper, C. Towards Security-Optimized Placement of ADS-B Sensors. In Proceedings of the 15th ACM Conference on Security and Privacy in Wireless and Mobile Networks (WiSec), San Antonio, TX, USA, 16–19 May 2022. [Google Scholar]
- Strohmeier, M.; Schäfer, M.; Lenders, V.; Martinovic, I. Realities and challenges of nextgen air traffic management: The case of ADS-B. IEEE Commun. Mag. 2014, 52, 111–118. [Google Scholar] [CrossRef]
- Dunlay, W.J.; Rakas, J. NextGen, the Next Generation Air Transportation System: Transforming Air Traffic Control from Ground-Based and Human-Centric to Satellite-Based and Airplane-Centric. TR News 2011, 276, 7–13. [Google Scholar]
- Blythe, W.; Anderson, H.; King, N. ADS-B Implementation and Operations Guidance Document; International Civil Aviation Organization: Asia and Pacific Office: Bangkok, Thailand, 2011. [Google Scholar]
- Dong, Z.; Fan, B.; Li, F.; Xu, X.; Sun, H.; Cao, W. TCN-Informer-Based Flight Trajectory Prediction for Aircraft in the Approach Phase. Sustainability 2023, 15, 16344. [Google Scholar] [CrossRef]
- Muhammad, Z.; Rozaida, G.; Muhammad, A.; Yana, M.; Mazwin, M.; Mohmad, H. An efficient two-state GRU based on feature attention mechanism for sentiment analysis. Multimed. Tools Appl. 2022, 83, 3085–3110. [Google Scholar]
- Li, Z.; Li, S.H.; Wu, X.L. General aircraft 4D flight trajectory prediction method based on data fusion. In Proceedings of the 2015 International Conference on Machine Learning and Cybernetics (ICMLC), Guangzhou, China, 12–15 July 2015. [Google Scholar]
- Zhang, J.; Liu, J.; Hu, R.; Zhu, H. Online four dimensional trajectory prediction method based on aircraft intent updating. Aerosp. Sci. Technol. 2018, 77, 774–787. [Google Scholar] [CrossRef]
- Kalman, R.E.; Bucy, R.S. New results in linear filtering and prediction problems. Trans. ASME-J. Basic Eng. 1961, 82, 95–108. [Google Scholar] [CrossRef]
- Blom, H.A.P.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. Design of an interacting multiple model algorithm for air traffic control tracking. In Proceedings of the 32nd IEEE Conference on Decision and Control, San Antonio, TX, USA, 15–17 December 1993. [Google Scholar]
- Yepes, J.L.; Hwang, I.; Rotea, M. New algorithms for aircraft intent inference and trajectory prediction. J. Guid. Control Dyn. 2007, 30, 370–382. [Google Scholar] [CrossRef]
- Li, K.; Cao, Z.; Hanebeck, U.D. Continuous-Time Ultra-Wideband-Inertial Fusion. IEEE Robot. Autom. Lett. 2023, 8, 4338–4345. [Google Scholar] [CrossRef]
- Li, J.; Ge, C.; Xu, C.; Gong, J.; Gui, W.; Zhang, C.; Liang, X.; Ding, W. VLocSense: Integrated VLC System for Indoor Passive Localization and Human Sensing. In Proceedings of the 30th Annual International Conference on Mobile Computing and Networking (ACM MobiCom’24), Washington, DC, USA, 18–22 November 2024. [Google Scholar]
- Nguyen, A.D.; Le, C.P.; Walunj, P.; Netchaev, A.; Do, T.N.; La, H.M. A Multi-model Fusion of LiDAR-Inertial Odometry via Localization and Mapping. In Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 14–18 October 2024. [Google Scholar]
- Leege, A.; Paassen, M.; Mulder, M. A Machine Learning Approach to Trajectory Prediction. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Pang, Y.; Wang, Y.; Liu, Y. Probabilistic Aircraft Trajectory Prediction with Weather Uncertainties Using Approximate Bayesian Variational Inference to Neural Networks. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual, 15–19 June 2020. [Google Scholar]
- Ma, L.; Tian, S. A hybrid CNN-LSTM model for aircraft 4D trajectory prediction. IEEE Access 2020, 8, 134668–134680. [Google Scholar] [CrossRef]
- Jia, P.; Chen, H.; Zhang, L.; Han, D. Attention-LSTM based prediction model for aircraft 4D trajectory. Sci. Rep. 2022, 12, 64915533. [Google Scholar] [CrossRef] [PubMed]
- Zhong, G.; Zhang, H.; Zhou, J.; Zhou, J.; Liu, H. Short-term 4D trajectory prediction for UAV based on spatio-temporal trajectory clustering. IEEE Access 2022, 10, 93362–93380. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, K. A Fractal Dimension Feature Model for Accurate 4D Flight-Trajectory Prediction. Sustainability 2023, 15, 1272. [Google Scholar] [CrossRef]
- Han, P.; Wang, W.; Shi, Q.; Yang, J. Real-time Short-Term Trajectory Prediction Based on GRU Neural Network. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019. [Google Scholar]
- Wang, Z.; Zhang, Z.; Cui, Z. Research on Resampling and Clustering Method of Aircraft Flight Trajectory. J. Signal Process. Syst. 2023, 95, 319–331. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. In Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Giuliari, F.; Hasan, I.; Cristani, M.; Galasso, F. Transformer Networks for Trajectory Forecasting. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021. [Google Scholar]
- Zhang, Z.; Guo, D.; Zhou, S.; Zhang, J.; Lin, Y. Flight trajectory prediction enabled by time-frequency wavelet transform. Nat. Commun. 2023, 14, 5258. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Yao, Z.; Lu, M. Lidar/UWB Fusion Based SLAM with Anti-Degeneration Capability. IEEE Trans. Veh. Technol. 2021, 70, 820–830. [Google Scholar] [CrossRef]
- Sun, J.; Sun, W.; Zheng, J.; Fang, X.; Liu, J.; Mian, A. UWB–IMU–Odometer Fusion for Simultaneous Calibration and Localization. IEEE Internet Things J. 2025, 12, 950–963. [Google Scholar] [CrossRef]
- Wang, L.; Cheng, L.; Liu, Y. Uncertainty-oriented physics-informed long short-term memory (UOPI-LSTM) network framework for dynamic force identification with interval uncertainties. Expert Syst. Appl. 2025, 22, 127067. [Google Scholar] [CrossRef]
- Guo, D.; Wu, E.Q.; Wu, Y.; Zhang, J.; Law, R.; Lin, Y. FlightBERT: Binary encoding representation for flight trajectory prediction. IEEE Trans. Intell. Transp. Syst. 2022, 24, 1828–1842. [Google Scholar] [CrossRef]
- Zhou, H.; Li, J.; Zhang, S.; Zhang, S.; Yan, M.; Xiong, H. Expanding the prediction capacity in long sequence time-series forecasting. Artif. Intell. 2023, 318, 103886. [Google Scholar] [CrossRef]
- Xu, H.; Peng, Q.; Wang, Y.; Zhan, Z. Power-Load Forecasting Model Based on Informer and Its Application. Energies 2023, 16, 3086. [Google Scholar] [CrossRef]
- An, Z.; Cheng, L.; Guo, Y.; Ren, M.; Feng, W.; Sun, B.; Ling, J.; Chen, H.; Chen, W.; Luo, Y.; et al. A novel principal component analysis-informer model for fault prediction of nuclear valves. Machines 2022, 10, 240. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, L.; Li, N.; Tian, J. Time series forecasting of motor bearing vibration based on informer. Sensors 2022, 22, 5858. [Google Scholar] [CrossRef]
- Ma, J.; Dan, J. Long-Term Structural State Trend Forecasting Based on an FFT–Informer Model. Appl. Sci. 2023, 13, 2553. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K. and Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Parameter Value |
|---|---|
| epoch | 20 |
| d_model | 512 |
| num_heads | 8 |
| activation | GeLU |
| e_layers | 3 |
| d_layers | 2 |
| d_ff | 512 |
| dropout_rate | 0.1 |
| output_size | 3 |
| initial learning rate | 1 × 10−4 |
| seq_length | 30 |
| batch size | 64 |
| optimizer | Adam |
| Flight Phase | Evaluation Indicator | Model | Latitude/° | Longitude/° | Altitude/m |
|---|---|---|---|---|---|
| Climb Phase | MAE | Informer | 0.99548 | 0.03444 | 132.06817 |
| LSTM | 0.10343 | 0.06473 | 86.02405 | ||
| IMM-Informer | 0.02852 | 0.01891 | 40.40406 | ||
| RMSE | Informer | 1.00458 | 0.04582 | 192.69011 | |
| LSTM | 0.12058 | 0.07505 | 101.95902 | ||
| IMM-Informer | 0.04233 | 0.03108 | 50.88601 | ||
| MAPE | Informer | 0.83718 | 0.12060 | 4.61993 | |
| LSTM | 0.08680 | 0.22175 | 2.09658 | ||
| IMM-Informer | 0.02410 | 0.06523 | 0.13332 | ||
| Descent Phase | MAE | Informer | 0.41380 | 0.12588 | 136.25251 |
| LSTM | 0.13580 | 0.10085 | 110.34593 | ||
| IMM-Informer | 0.03016 | 0.01398 | 34.68435 | ||
| RMSE | Informer | 0.42711 | 0.14870 | 165.37633 | |
| LSTM | 0.17413 | 0.13184 | 137.15522 | ||
| IMM-Informer | 0.06864 | 0.04478 | 59.86134 | ||
| MAPE | Informer | 0.38872 | 0.48639 | 2.39682 | |
| LSTM | 0.12810 | 0.38845 | 1.87864 | ||
| IMM-Informer | 0.02835 | 0.05392 | 0.067292 | ||
| Approach and Landing Phase | MAE | Informer | 0.70733 | 0.07791 | 124.84474 |
| LSTM | 0.11727 | 0.07358 | 90.75797 | ||
| IMM-Informer | 0.02918 | 0.01400 | 39.77841 | ||
| RMSE | Informer | 0.76103 | 0.10420 | 180.26527 | |
| LSTM | 0.14611 | 0.10011 | 139.50289 | ||
| IMM-Informer | 0.05531 | 0.03468 | 64.45676 | ||
| MAPE | Informer | 0.61710 | 0.29185 | 5.18018 | |
| LSTM | 0.10547 | 0.27147 | 6.13991 | ||
| IMM-Informer | 0.02612 | 0.050081 | 0.07094 |
| Flight Phase | Model | MAE/m | RMSE/m | MAPE/% |
|---|---|---|---|---|
| Climb Phase (a) | Informer | 45.47609 | 107.35282 | 1.72353 |
| LSTM | 26.63042 | 56.84638 | 1.21374 | |
| IMM-Informer | 13.46547 | 16.24835 | 0.52853 | |
| Descent Phase (a) | Informer | 47.46290 | 97.74983 | 1.18429 |
| LSTM | 38.28472 | 81.37840 | 1.00298 | |
| IMM-Informer | 14.37539 | 16.28472 | 0.42749 | |
| Approach and Landing (a) | Informer | 37.45782 | 106.12834 | 4.92387 |
| LSTM | 32.27865 | 82.34620 | 2.26375 | |
| IMM-Informer | 13.10498 | 17.24801 | 0.83038 | |
| Climb Phase (b) | Informer | 44.36603 | 111.25126 | 1.85924 |
| LSTM | 28.73074 | 58.86615 | 0.90171 | |
| IMM-Informer | 13.48383 | 15.24737 | 0.44741 | |
| Descent Phase (b) | Informer | 45.59741 | 95.48042 | 1.09064 |
| LSTM | 36.86086 | 79.18678 | 0.89841 | |
| IMM-Informer | 11.15761 | 15.76549 | 0.52517 | |
| Approach and Landing Phase (b) | Informer | 41.87668 | 104.07714 | 5.06006 |
| LSTM | 30.31627 | 80.54209 | 2.04663 | |
| IMM-Informer | 14.27386 | 16.87389 | 0.82993 |
| Method | Climb Phase | Descent Phase | Approach & Landing Phase | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MAE/m | RMSE/m | MAPE/% | MAE/m | RMSE/m | MAPE/% | MAE/m | RMSE/m | MAPE/% | |
| KF | 45.43819 | 104.38423 | 1.63842 | 42.39424 | 90.34294 | 1.12782 | 42.38492 | 102.384209 | 3.58538 |
| Informer | 46.45449 | 105.46542 | 1.76324 | 46.46313 | 95.56364 | 1.25564 | 37.45782 | 104.43744 | 4.75356 |
| LSTM | 37.67862 | 54.78643 | 1.23545 | 37.45215 | 82.45632 | 1.04563 | 38.27865 | 81.457477 | 2.23447 |
| IMM-LSTM | 17.58695 | 26.46275 | 0.74762 | 16.56773 | 26.64336 | 0.78546 | 17.33497 | 26.75425 | 1.36434 |
| IMM-GRU | 17.86972 | 26.67356 | 0.76854 | 16.86354 | 26.72543 | 0.77644 | 17.23485 | 26.76256 | 1.27642 |
| IMM-Transformer | 9.67325 | 12.56634 | 0.59768 | 10.55768 | 13.65266 | 0.56746 | 12.81507 | 14.35884 | 0.94563 |
| IMM-Informer | 7.46525 | 9.24632 | 0.51648 | 8.37539 | 9.56732 | 0.45567 | 10.10534 | 12.17654 | 0.82853 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Xu, X.; Wang, R.; Ma, M.; Dong, Z. Flight Trajectory Prediction Based on Automatic Dependent Surveillance-Broadcast Data Fusion with Interacting Multiple Model and Informer Framework. Sensors 2025, 25, 2531. https://doi.org/10.3390/s25082531
Li F, Xu X, Wang R, Ma M, Dong Z. Flight Trajectory Prediction Based on Automatic Dependent Surveillance-Broadcast Data Fusion with Interacting Multiple Model and Informer Framework. Sensors. 2025; 25(8):2531. https://doi.org/10.3390/s25082531
Chicago/Turabian StyleLi, Fan, Xuezhi Xu, Rihan Wang, Mingyuan Ma, and Zijing Dong. 2025. "Flight Trajectory Prediction Based on Automatic Dependent Surveillance-Broadcast Data Fusion with Interacting Multiple Model and Informer Framework" Sensors 25, no. 8: 2531. https://doi.org/10.3390/s25082531
APA StyleLi, F., Xu, X., Wang, R., Ma, M., & Dong, Z. (2025). Flight Trajectory Prediction Based on Automatic Dependent Surveillance-Broadcast Data Fusion with Interacting Multiple Model and Informer Framework. Sensors, 25(8), 2531. https://doi.org/10.3390/s25082531