


Bottom Plate Damage Localization Method for Storage Tanks Based on Bottom Plate-Wall Plate Synergy
Abstract
1. Introduction
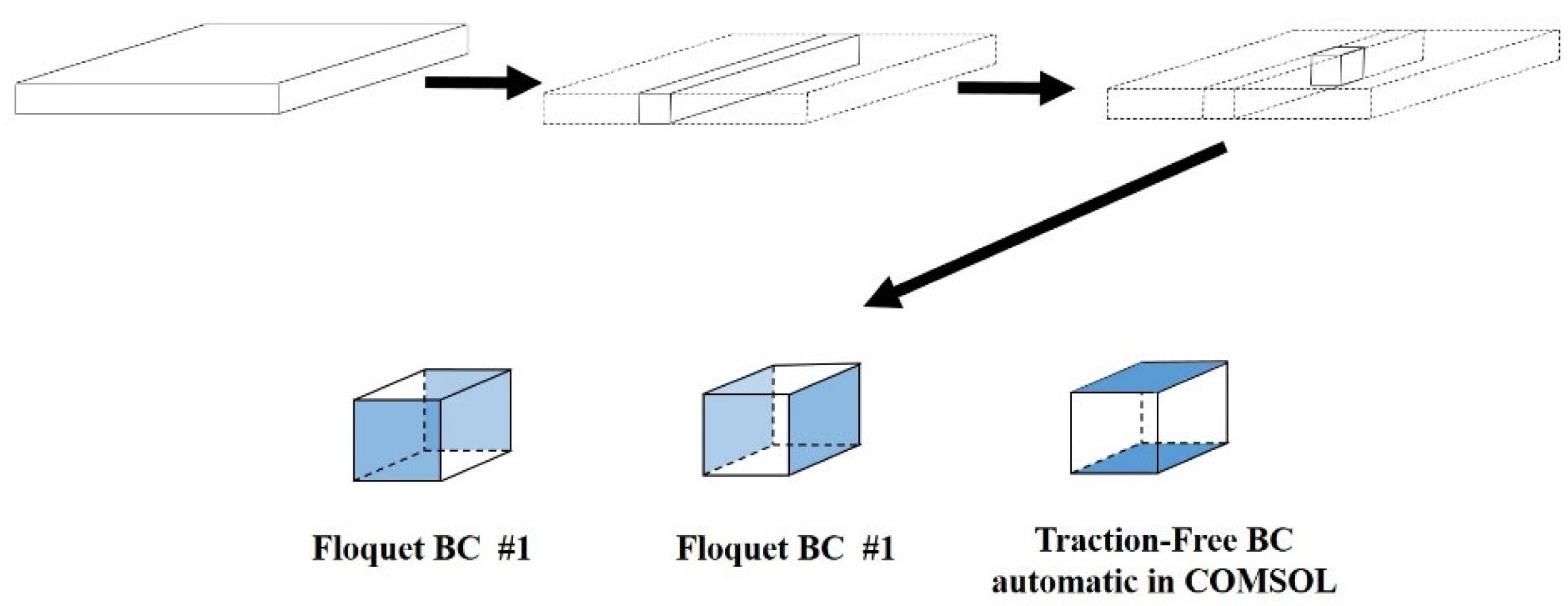
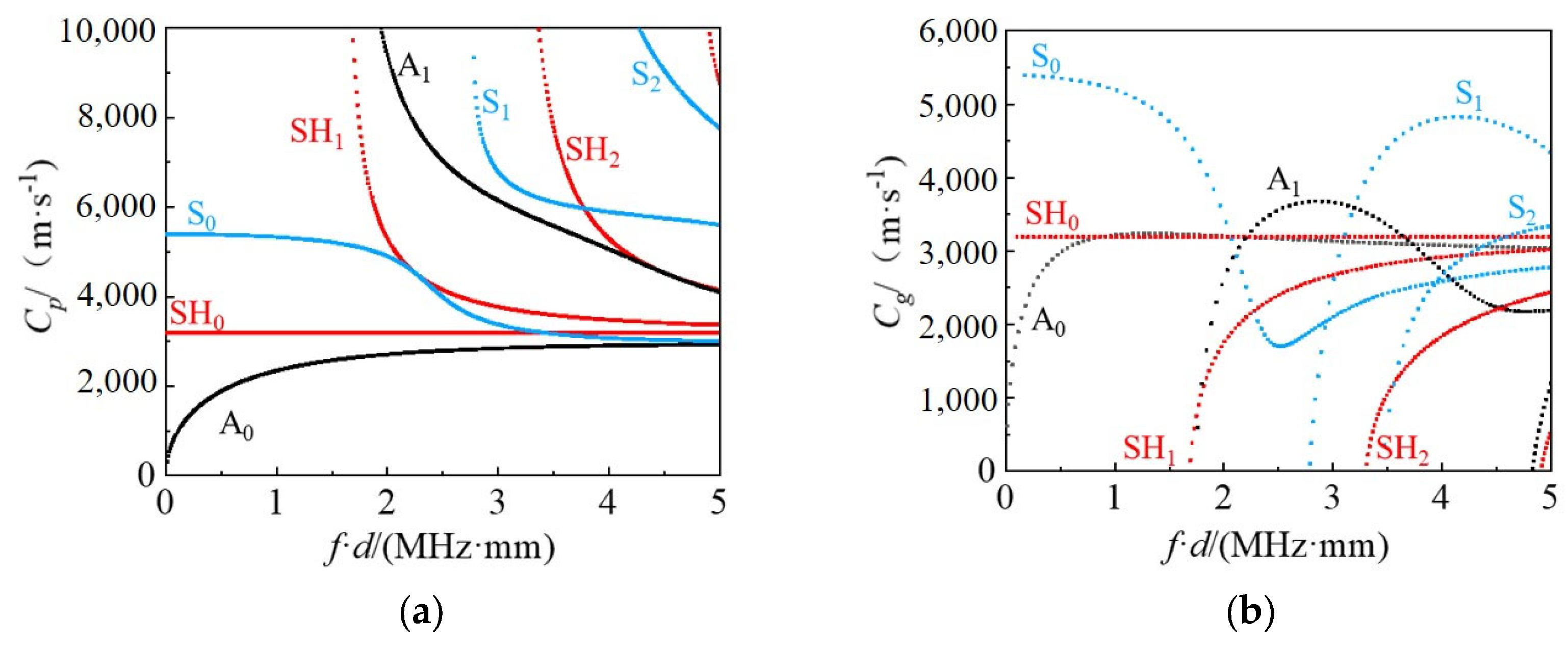
2. Dispersion Curve Construction for Storage Tank Baseplate
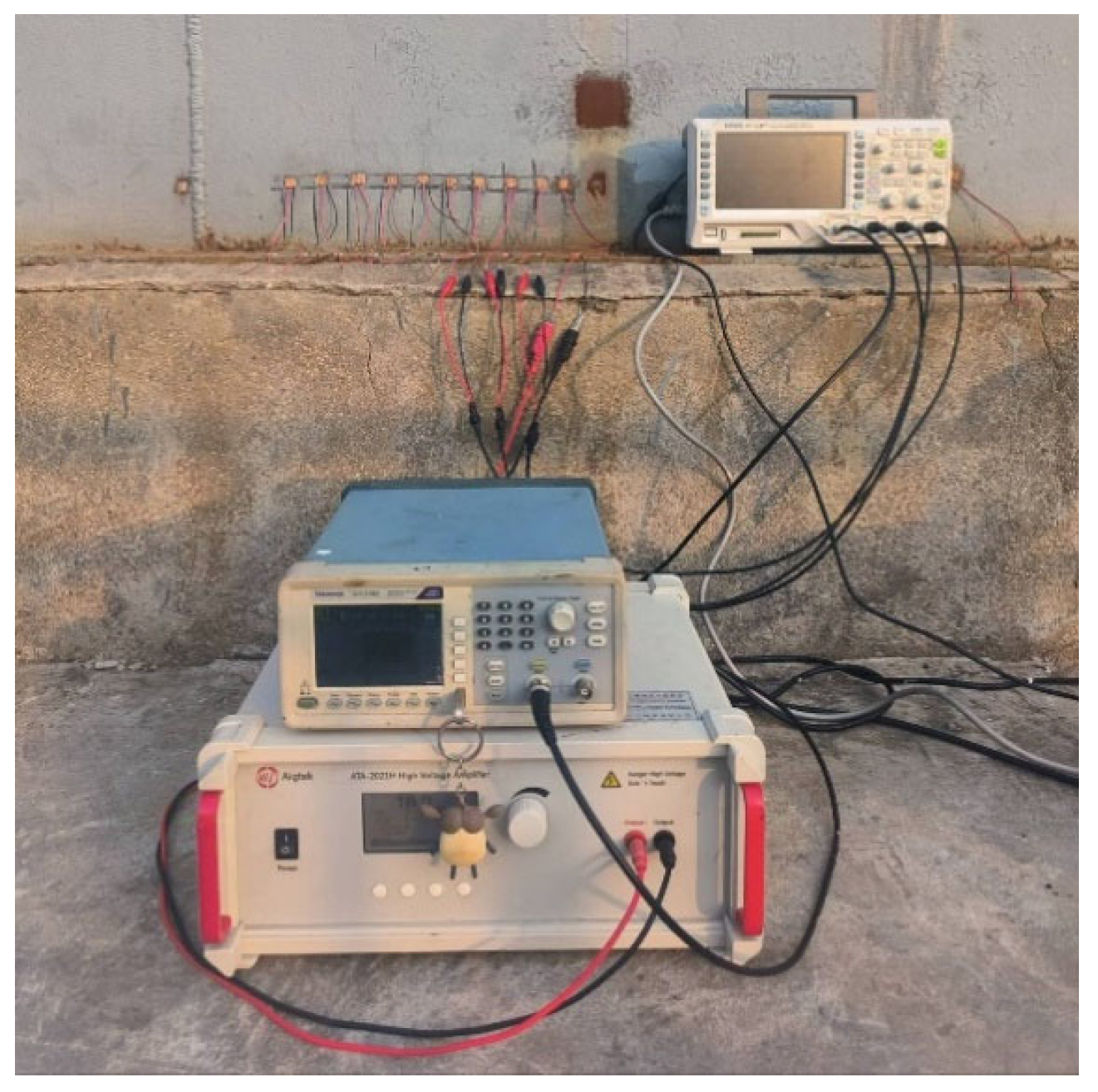
3. Experimental Setup
4. Damage Localization Methodology
4.1. Total Focusing Imaging-Based Localization Using Bottom Plate Array
4.2. Collaborative Bottom Plate-Wall Plate Damage Detection Methodology
5. Results and Analysis
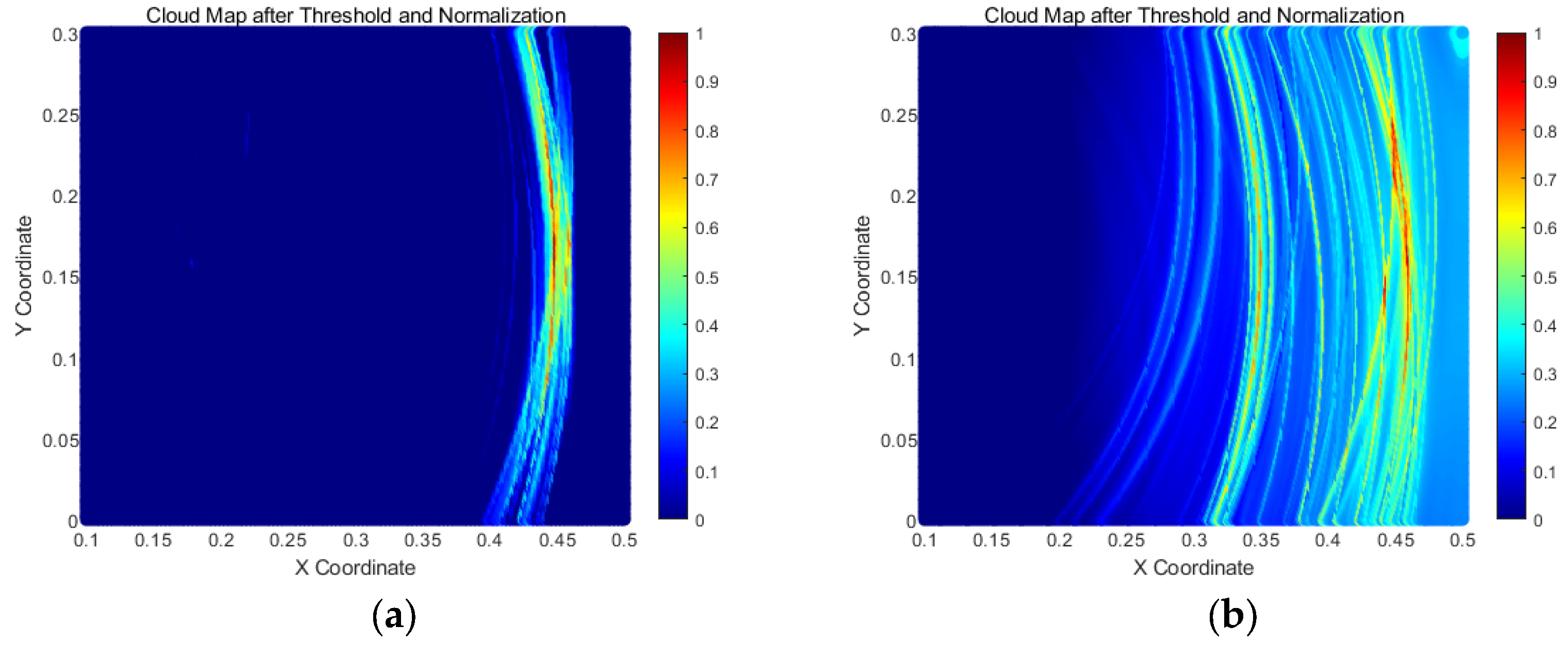
5.1. Damage Detection via Bottom Plate Array Total Focusing Imaging
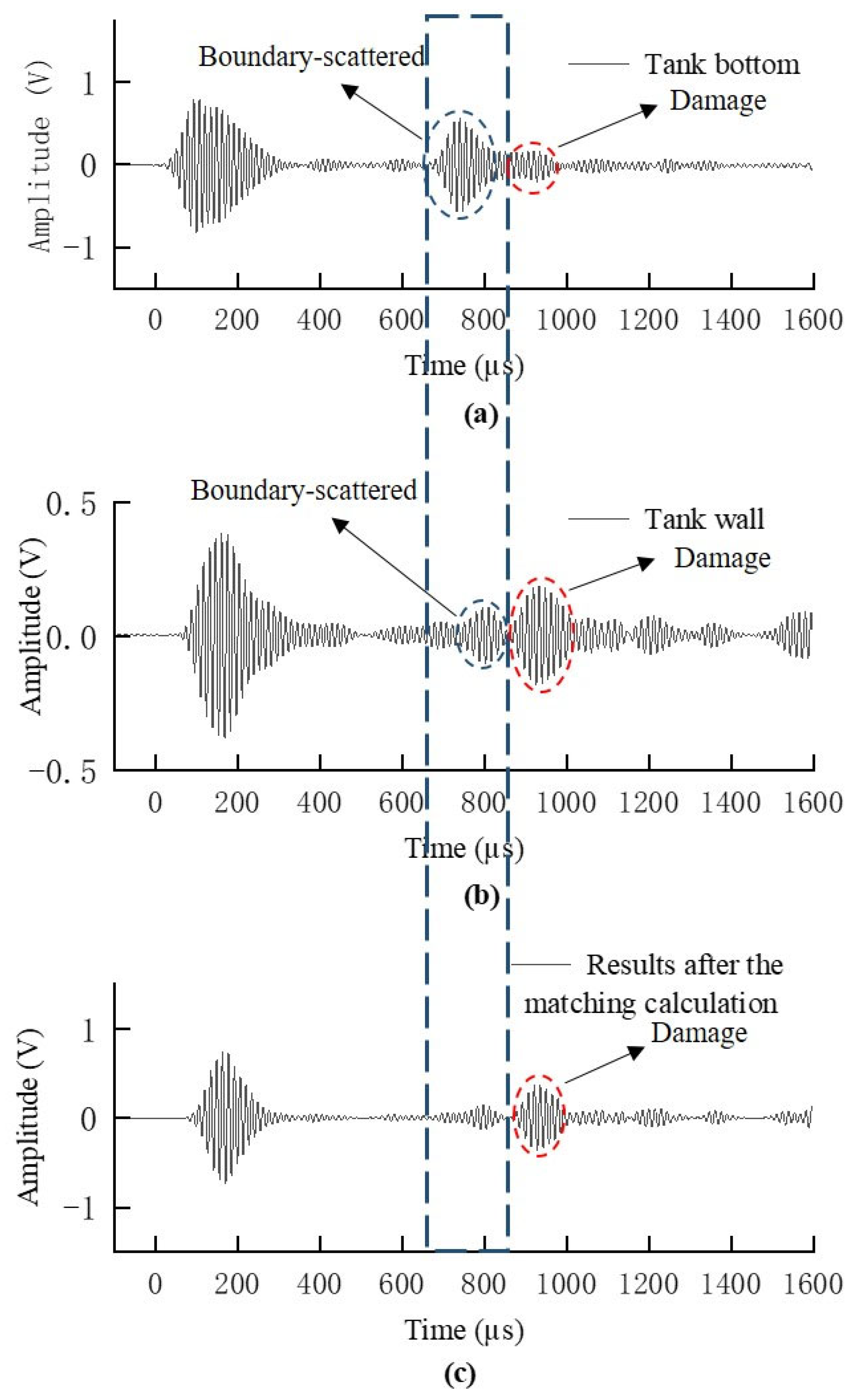
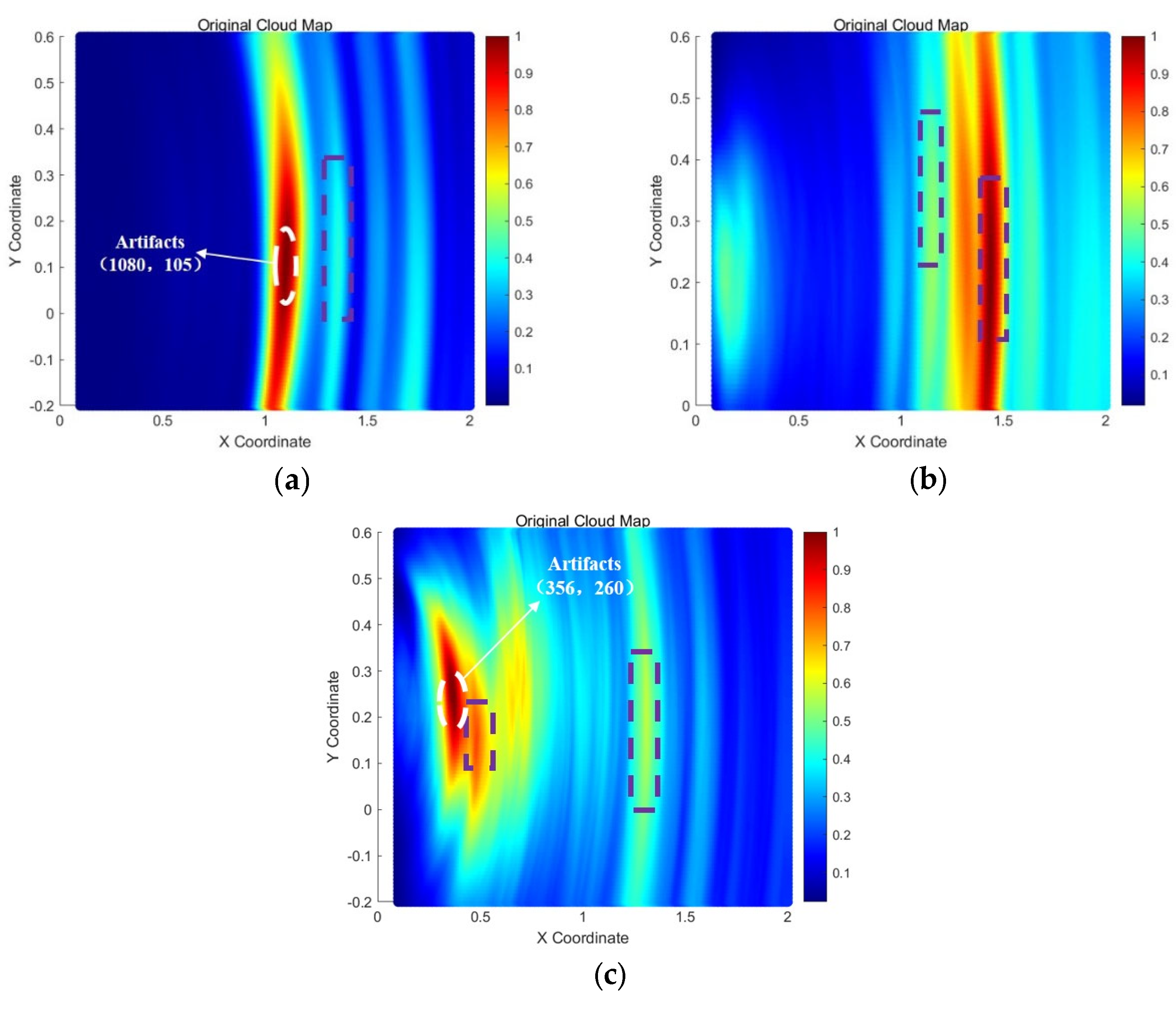
5.1.1. Analysis of the Interference Effect of Side Boundary Scattering Signals on the Tank Bottom Damage Detection
5.1.2. Damage Detection Experiment for Storage Tank Bottom Plate
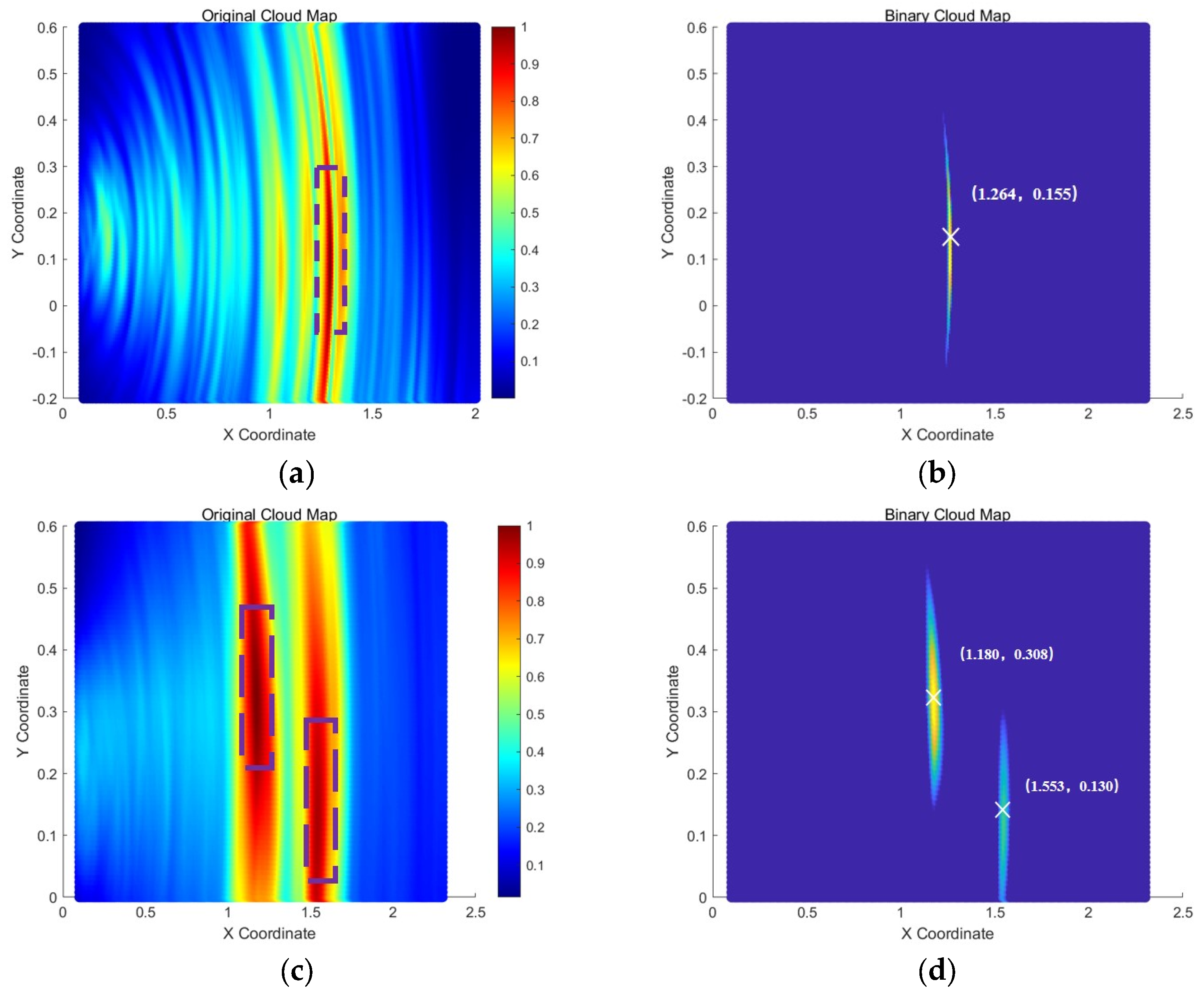
5.2. Collaborative Detection with Bottom Plate-Wall Plate Signal Fusion
5.3. Error Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.J.; Chen, D.; Chen, L.; Liu, Y.Z.; An, R.; Wang, G. Finite Element Analysis and Research on Corrosion Defect of Tank Floor. Appl. Mech. Mater. 2017, 853, 514–518. [Google Scholar] [CrossRef]
- Luo, F.W.; Ran, R.; Wang, L. Study on Corrosion Law of Large Crude Oil Storage Tank Floor and Risk-Based Inspection and Maintenance Technology. Corros. Sci. Technol. 2020, 19, 66–74. [Google Scholar]
- Cirimello, P.G.; Otegui, J.L.; Ramajo, D.; Carfi, G. A Major Leak in a Crude Oil Tank: Predictable and Unexpected Root Causes. Eng. Fail. Anal. 2019, 100, 456–469. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, C.; Li, R.; Cai, M.; Jia, G. Theory and Application of Magnetic Flux Leakage Pipeline Detection. Sensors 2015, 15, 31036–31055. [Google Scholar] [CrossRef]
- Spurek, M.A.; Spierings, A.B.; Lany, M.; Revaz, B.; Santi, G.; Wicht, J.; Wegener, K. In-Situ Monitoring of Powder Bed Fusion of Metals Using Eddy Current Testing. Addit. Manuf. 2022, 60, 103259. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, B.; Kang, Y.; Liu, B.; Wang, S.; Duan, Z. A Novel Thermography-Based Dry Magnetic Particle Testing Method. IEEE Trans. Instrum. Meas. 2022, 71, 9505309. [Google Scholar] [CrossRef]
- Raišutis, R.; Tumšys, O.; Žukauskas, E.; Samaitis, V.; Draudvilienė, L.; Jankauskas, A. An Inspection Technique for Steel Pipes Wall Condition Using Ultrasonic Guided Helical Waves and a Limited Number of Transducers. Materials 2023, 16, 5410. [Google Scholar] [CrossRef]
- Shah, J.K.; Wang, H.; El-Hawwat, S. Detection of Internal Crack Growth in Polyethylene Pipe Using Guided Wave Ultrasonic Testing. Earthq. Eng. Eng. Vib. 2024, 23, 319–329. [Google Scholar] [CrossRef]
- Diogo, A.R.; Moreira, B.; Gouveia, C.A.; Tavares, J.M.R. A Review of Signal Processing Techniques for Ultrasonic Guided Wave Testing. Metals 2022, 12, 936. [Google Scholar] [CrossRef]
- Lyu, F.; Zhou, X.; Ding, Z.; Qiao, X.; Song, D. Application Research of Ultrasonic-Guided Wave Technology in Pipeline Corrosion Defect Detection: A Review. Coatings 2024, 14, 358. [Google Scholar] [CrossRef]
- Zang, X.; Xu, Z.D.; Lu, H.; Zhu, C.; Zhang, Z. Ultrasonic Guided Wave Techniques and Applications in Pipeline Defect Detection: A Review. Int. J. Press. Vessel. Pip. 2023, 206, 105033. [Google Scholar] [CrossRef]
- Yu, X.; Qin, R.; Deng, M. New Insights into Topographically Feature Guided Waves (FGW) Propagation in Non-Uniform Elastic Waveguides. Wave Motion 2022, 109, 102866. [Google Scholar] [CrossRef]
- Zhu, H.; Kotousov, A.; Ng, C.T. Defects Evaluation Near Edges of Structural Elements Using the Fundamental Mode of Edge Waves. J. Sound Vib. 2023, 557, 117753. [Google Scholar] [CrossRef]
- Li, F.; Liu, Z.; Sun, X.; Li, H.; Meng, G. Propagation of Guided Waves in Pressure Vessel. Wave Motion 2015, 52, 216–228. [Google Scholar] [CrossRef]
- Huang, S.Y.; Guo, Y.Q.; Zang, X.L.; Xu, Z.D. Design of Ultrasonic Guided Wave Pipeline Non-Destructive Testing System Based on Adaptive Wavelet Threshold Denoising. Electronics 2024, 13, 2536. [Google Scholar] [CrossRef]
- Cheng, Y.; Deng, Y.; Cao, J.; Xiong, X.; Bai, L.; Li, Z. Multi-Wave and Hybrid Imaging Techniques: A New Direction for Nondestructive Testing and Structural Health Monitoring. Sensors 2013, 13, 16146–16190. [Google Scholar] [CrossRef]
- Fakih, M.A.; Mustapha, S.; Tarraf, J.; Ayoub, G.; Hamade, R. Detection and Assessment of Flaws in Friction Stir Welded Joints Using Ultrasonic Guided Waves: Experimental and Finite Element Analysis. Mech. Syst. Signal Process. 2018, 101, 516–534. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, J.; Hu, Y.; Liu, Y.; Shen, X. Electromagnetic Acoustic Detection of Pipe Defects Hidden Above T-Type Support Structures with Circumferential Shear Horizontal Guided Wave. Micromachines 2024, 15, 550. [Google Scholar] [CrossRef]
- Wu, J.; Jiang, C.; Fang, H.; Ng, C.T. Damage Detection in the T-Welded Joint Using Rayleigh-Like Feature Guided Wave. NDT E Int. 2023, 135, 102806. [Google Scholar] [CrossRef]
- Raišutis, R.; Kažys, R.; Mažeika, L.; Žukauskas, E.; Šliteris, R.; Vladišauskas, A. Application of Ultrasonic Guided Waves for Non-Destructive Testing of Large and Complex Geometry Engineering Structures. Vibroeng. Procedia 2017, 14, 87–90. [Google Scholar] [CrossRef]
- Lowe, P.S.; Duan, W.; Kanfoud, J.; Gan, T.H. Structural Health Monitoring of Above-Ground Storage Tank Floors by Ultrasonic Guided Wave Excitation on the Tank Wall. Sensors 2017, 17, 2542. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wu, B.; Gao, X.; Liu, Y.; Li, X.; Liu, X. Ultrasonic Guided Wave Defect Detection Method for Tank Bottom Plate Based on SH0 Mode Multichannel Magnetostrictive Sensor. Measurement 2023, 223, 113790. [Google Scholar] [CrossRef]
- Du, F.; Zeng, L.; Sha, B.; Huang, L.; Xiao, J. Damage Imaging in Composite Laminates Using Broadband Multipath Lamb Waves. IEEE Trans. Instrum. Meas. 2022, 71, 6008014. [Google Scholar] [CrossRef]
- Han, C.; Yang, G.; Wang, J.; Guo, X. The Research on Propagation Characteristics of Acoustic Emission Signals in Stiffened Plates Based on the Multipath Propagation Model. Ultrasonics 2020, 108, 106177. [Google Scholar] [CrossRef]
- Zeng, L.; Huang, L.; Luo, Z.; Lin, J. Damage Imaging that Exploits Multipath Scattered Lamb Waves. Struct. Health Monit. 2020, 19, 1629–1644. [Google Scholar] [CrossRef]
- Yu, S.; Fan, C.; Zhang, M.; Zhao, Y. A Lamb wave time-reversal field reconstruction method for damage detection with automatic focusing determination. Ultrasonics 2023, 133, 107030. [Google Scholar] [CrossRef]
- Huang, L.; Zeng, L.; Lin, J.; Zhang, N. Baseline-free damage detection in composite plates using edge-reflected Lamb waves. Compos. Struct. 2020, 247, 112423. [Google Scholar] [CrossRef]
- Hall, J.S.; Michaels, J.E. Multipath ultrasonic guided wave imaging in complex structures. Struct. Health Monit. 2015, 14, 345–358. [Google Scholar] [CrossRef]
- Zhang, N.; Xu, C.; Zeng, L.; Deng, M. Blind zone defect imaging using multipath edge-reflected Lamb waves. Ultrasonics 2025, 145, 107473. [Google Scholar] [CrossRef]
- Hakoda, C.; Rose, J.; Shokouhi, P.; Lissenden, C. Using Floquet Periodicity to Easily Calculate Dispersion Curves and Wave Structures of Homogeneous Waveguides. AIP Conf. Proc. 2018, 1949, 020016. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Young’s Modulus E (GPa) | Density (kg/m3) | Poisson’s Ratio |
|---|---|---|---|
| Bottom Plate | 208 | 7850 | 0.3 |
| Wall Plate | 208 | 7850 | 0.3 |
| Weld Seam | 208 | 7900 | 0.3 |
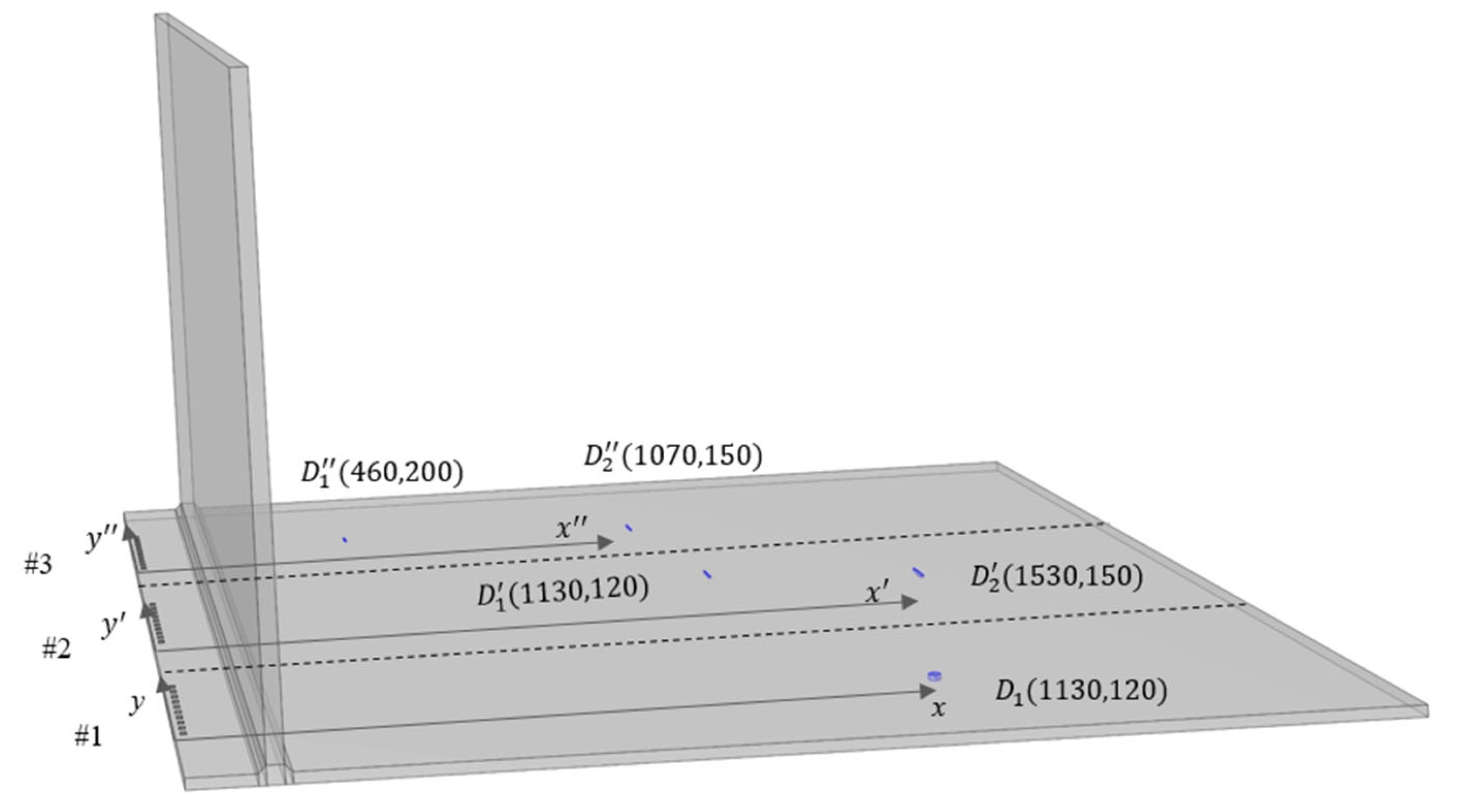
| Group | Location Coordinates (mm) | Dimensions (mm) | Depth (mm) |
|---|---|---|---|
| 1# | (1330, 120) | = 10 | 9.3 |
| 2# | (1130, 250) | 63 × 2 | 5.3 |
| (1530, 150) | 73 × 2 | 7.7 | |
| 3# | (460, 200) | 39 × 2 | 3.1 |
| (1070, 150) | 58 × 2 | 4.2 |
| Actual Damage Location (mm) | Imaging Method | Localization Result (mm) | Relative Error | Number of Artifacts with Grayscale Exceeding Damage |
|---|---|---|---|---|
| (1330,120) | Bottom Plate Array Detection | (1380, 90) | 3.6% | 2 |
| Collaborative Bottom Plate-Wall Plate Detection | (1264, 115) | 5.0% | 0 | |
| (1130,250) | Bottom Plate Array Detection | (1174, 235) | 3.5% | 1 |
| Collaborative Bottom Plate-Wall Plate Detection | (1180, 308) | 5.4% | 0 | |
| (1530,150) | Bottom Plate Array Detection | (1431, 227) | 5.8% | 0 |
| Collaborative Bottom Plate-Wall Plate Detection | (1553, 130) | 1.4% | 0 | |
| (460,200) | Bottom Plate Array Detection | (508, 147) | 5.4% | 1 |
| Collaborative Bottom Plate-Wall Plate Detection | (450, 196) | 2.1% | 0 | |
| (1070,150) | Bottom Plate Array Detection | (1233, 180) | 15.3% | 2 |
| Collaborative Bottom Plate-Wall Plate Detection | (1120, 155) | 4.6% | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Hu, L.; Dong, Y.; Chen, L.; Liu, G. Bottom Plate Damage Localization Method for Storage Tanks Based on Bottom Plate-Wall Plate Synergy. Sensors 2025, 25, 2515. https://doi.org/10.3390/s25082515
Ma Y, Hu L, Dong Y, Chen L, Liu G. Bottom Plate Damage Localization Method for Storage Tanks Based on Bottom Plate-Wall Plate Synergy. Sensors. 2025; 25(8):2515. https://doi.org/10.3390/s25082515
Chicago/Turabian StyleMa, Yunxiu, Linzhi Hu, Yuxuan Dong, Lei Chen, and Gang Liu. 2025. "Bottom Plate Damage Localization Method for Storage Tanks Based on Bottom Plate-Wall Plate Synergy" Sensors 25, no. 8: 2515. https://doi.org/10.3390/s25082515
APA StyleMa, Y., Hu, L., Dong, Y., Chen, L., & Liu, G. (2025). Bottom Plate Damage Localization Method for Storage Tanks Based on Bottom Plate-Wall Plate Synergy. Sensors, 25(8), 2515. https://doi.org/10.3390/s25082515