
On the Error Metrics Used for Direction of Arrival Estimation

 ,
,  , and
, and 
Abstract
1. Introduction
- The CRB serves as a theoretical benchmark for the variance of unbiased estimators, whereas error metrics are practical tools used to assess the accuracy of any estimator, regardless of whether it is biased or unbiased;
- The CRB focuses on the minimum achievable variance, offering insight into the optimal performance of an estimator. In contrast, error metrics concentrate on the actual performance of the estimator, providing a measure of how well it performs with real data.
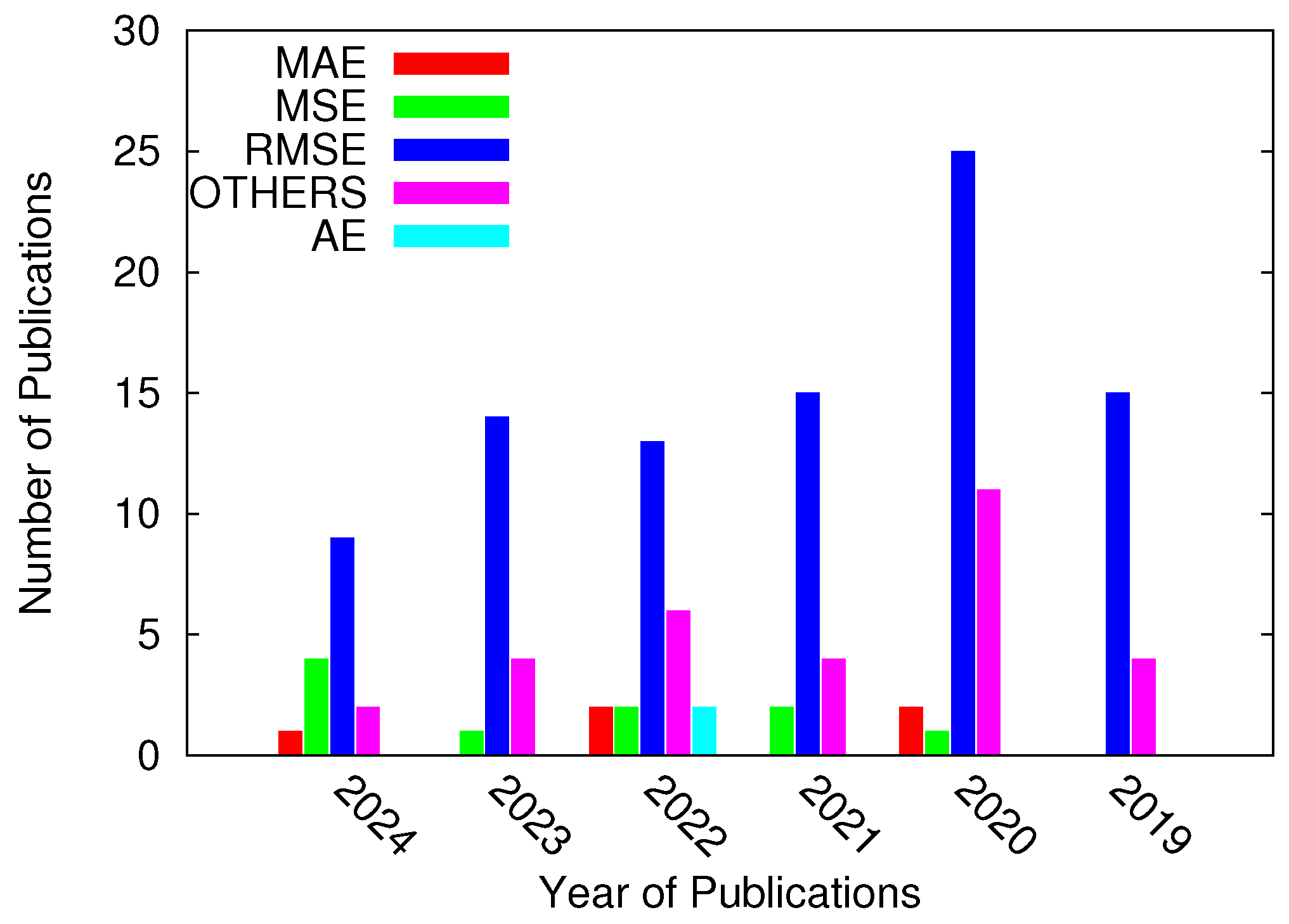
- Only two (i.e., 1.5%) papers reported an error metric that combined both the and angular directions by evaluating the angle between the actual direction of arrival and the estimated one . As a matter of fact, this error metric is meaningful from both a mathematical and physical point of view.
- In the roughly 22% papers remaining, the error metrics classified as “OTHERS” in Figure 2 were introduced. This category encompasses various definitions, including the cumulative distributed function (CDF) of the localization error [11] and other less-known/less widespread definitions (e.g., [28]), which are very problem-specific and can not be easily used as a figure of merit for performance comparisons.
- A comprehensive literature review on error metrics used for 1D and 2D DoA estimation.
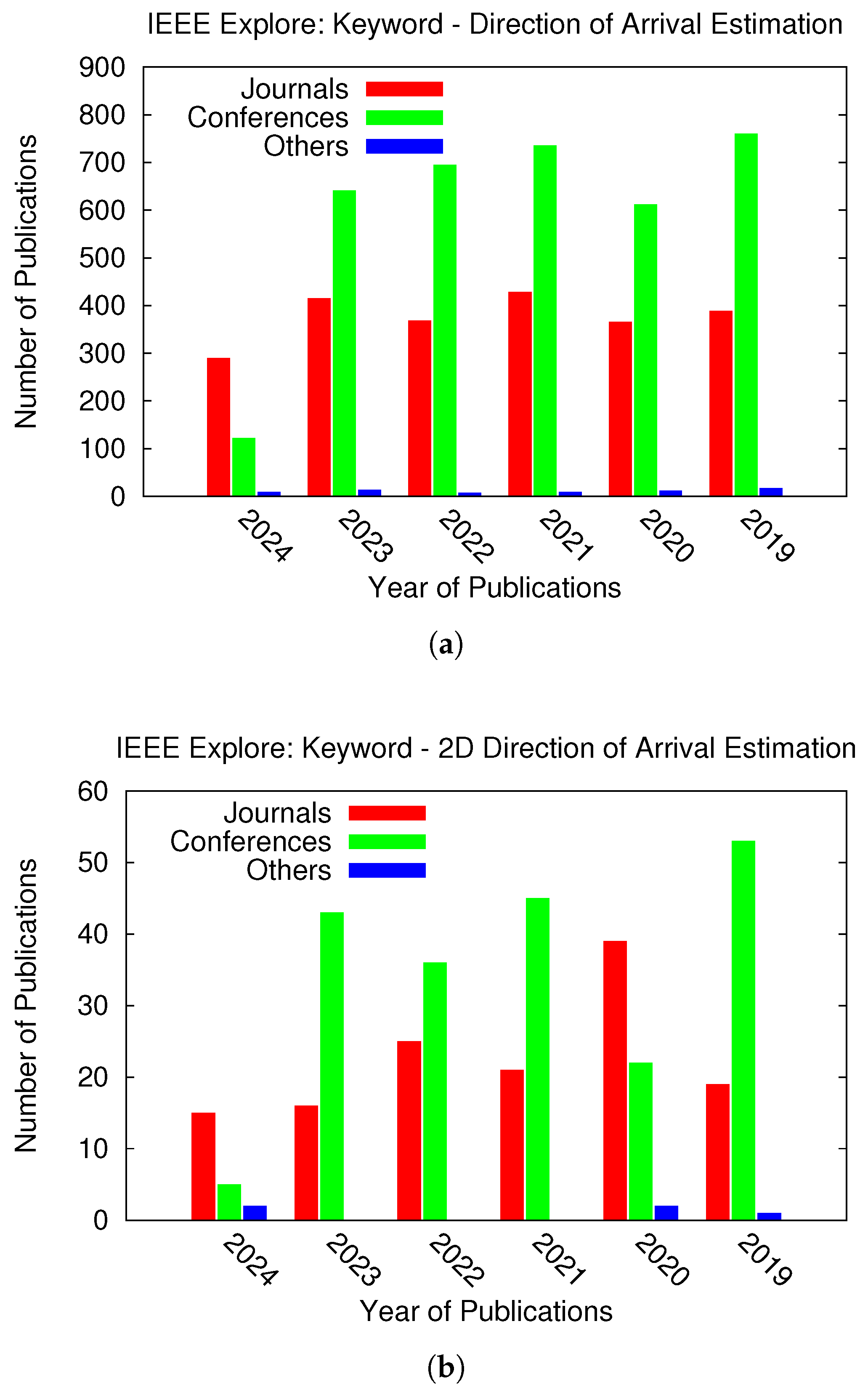
- A statistical analysis of the research trends in DoA estimation over the past six years, highlighting its growing significance.
- A statistical review of error metric choices in recent studies, revealing the lack of consensus among researchers.
- A mathematical derivation of commonly used error metrics, progressing from simple error estimation to DoA estimation, considering the number of signals, Monte Carlo simulations (trials), and both 1D and 2D cases.
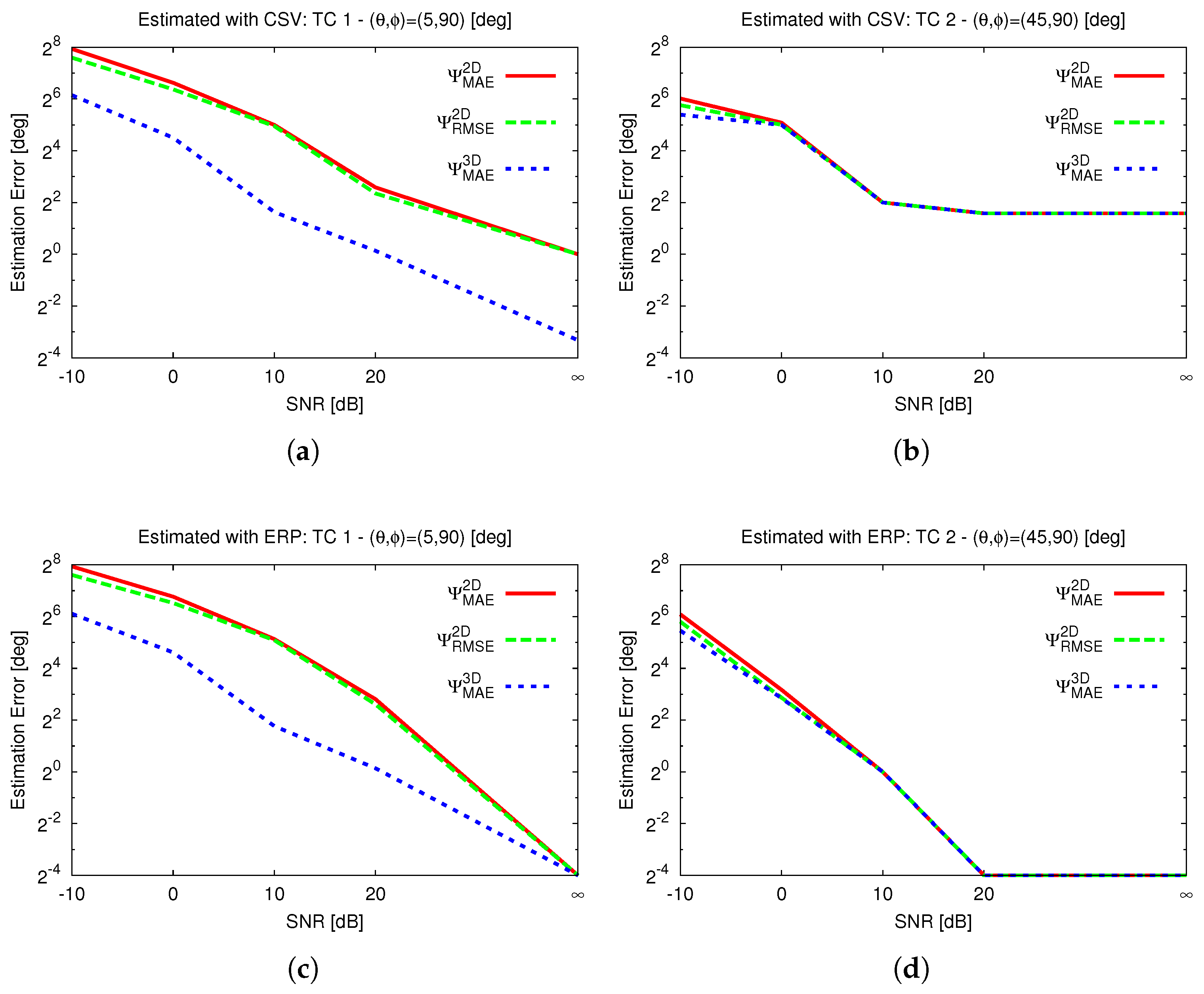
- A numerical analysis of various error metrics applied to test cases, demonstrating inconsistencies between the estimated and observable errors.
- The proposal of a new error metric for 2D DoA estimation that accounts for the problem’s inherent 3D nature, ensuring consistency between the estimated and physical errors.
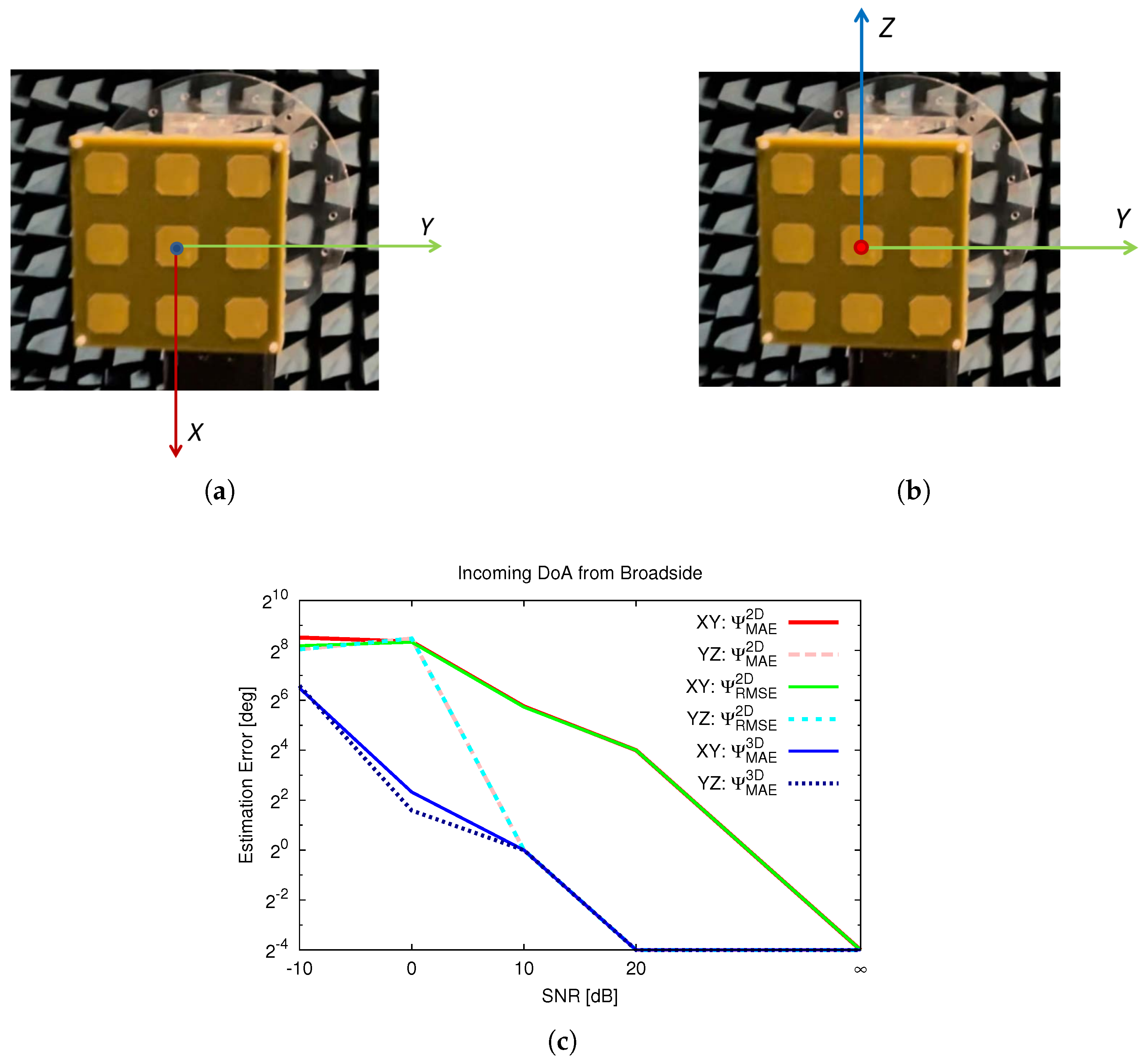
- A validation of the proposed error metric using both numerical and experimental data, and a comparison of the new metric with existing metrics.
- A discussion on current and potential use cases, emphasizing the importance of properly defining error metrics in DoA estimation.
2. Error Metrics for 1D DoA Estimation
3. Error Metrics for 2D DoA Estimation
4. Experimental Validation
4.1. Dependence of Incoming DoA
4.2. Reference Frame Dependence
4.3. Dependence on Number of Trials
5. Potential Use Cases
- Collect data (e.g., array signal snapshots).
- Estimate quick/rough DoAs.
- Compute DoA estimation error by means of a proper error metric for 2D DoAs.
- Refine data (i.e., by noise cancellation) or angular range (i.e., by defining the range of the estimated DoA) or angular samples (i.e., by defining a dense grid for higher resolution) based on the estimated DoAs and estimated errors.
- Restimate the DoA with the refined data or angular range or angular samples.
- Continue 3–5 until the stopping criteria are reached.
- Collect training data (e.g., array signal snapshots) on known true DoAs.
- Estimate DoAs using conventional methods (e.g., MUSIC).
- Compute the DoA estimation error by means of a proper error metric for 2D DoAs.
- Train a leaning method (e.g., a CNN) to predict DoA correction factors based on input features.
- Apply the correction to improve DoA estimation accuracy.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DoA | Direction of Arrival |
| RMSE | Root Mean Square Error |
| MSE | Mean Square Error |
| MAE | Mean Absolute Error |
| IoT | Internet of Things |
| UAV | Unmanned Aerial Vehicle |
| IEEE | Institute of Electrical and Electronics Engineers |
| 5G | Fifth Generation |
| 6G | Sixth Generation |
| CRB | Cramér–Rao Bound |
| CDF | Cumulative Distributed Function |
| TC | Test Case |
| 1D | One-Dimensional |
| 2D | Two-Dimensional |
Appendix A
References
- Wen, F.; Shi, J.; He, J.; Truong, T.K. 2D-DOD and 2D-DOA estimation using sparse L-shaped EMVS-MIMO radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 2077–2084. [Google Scholar]
- Wang, Z.; Mu, X.; Liu, Y. STARS enabled integrated sensing and communications. IEEE Trans. Wireless Commun. 2023, 22, 6750–6765. [Google Scholar]
- Keivaan, S.A.; Burasa, P.; Wu, K. Virtual Receiver Matrix and Combinatory Analog Operations for Future Multifunction Reconfigurable Sensing and Communication Wireless Systems. IEEE Trans. Microw. Theory Tech. 2022, 71, 424–433. [Google Scholar]
- Wen, F.; Gui, G.; Gacanin, H.; Sari, H. Compressive sampling framework for 2D-DOA and polarization estimation in mmWave polarized massive MIMO systems. IEEE Trans. Wireless Commun. 2022, 22, 3071–3083. [Google Scholar]
- Wen, F.; Shi, J.; Gui, G.; Gacanin, H.; Dobre, O.A. 3D positioning method for anonymous UAV based on bistatic polarized MIMO radar. IEEE IoT J. 2022, 10, 815–827. [Google Scholar]
- Wan, L.; Sun, Y.; Sun, L.; Ning, Z.; Rodrigues, J.J. Deep learning based autonomous vehicle super resolution DOA estimation for safety driving. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4301–4315. [Google Scholar]
- You, M.Y. A unified two-dimensional direction finding approach for sensor arrays based on deep neural networks with inhomogeneous angle and frequency partition. IEEE Sens. J. 2022, 22, 6840–6850. [Google Scholar] [CrossRef]
- Zhu, W.; Zhang, M.; Li, P.; Wu, C. Two-dimensional DOA estimation via deep ensemble learning. IEEE Access 2020, 8, 124544–124552. [Google Scholar]
- Alawsh, S.A.; Mohamed, M.H.; Aboumahmoud, I.; Alhassoun, M.; Muqaibel, A.H. Sparse Billboard and T-Shaped Arrays for Two-Dimensional Direction of Arrival Estimation. IEEE Open J. Signal Process. 2023, 4, 322–335. [Google Scholar] [CrossRef]
- Aboumahmoud, I.; Muqaibel, A.; Alhassoun, M.; Alawsh, S. A review of sparse sensor arrays for two-dimensional direction-of-arrival estimation. IEEE Access 2021, 9, 92999–93017. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, L.; Chen, L. Virtual antenna array and multipath AOA-delay fingerprints based location for moving targets. IEEE Access 2020, 8, 186919–186931. [Google Scholar]
- Pan, M.; Liu, P.; Liu, S.; Qi, W.; Huang, Y.; You, X.; Jia, X.; Li, X. Efficient joint DOA and TOA estimation for indoor positioning with 5G picocell base stations. IEEE Trans. Instrum. Meas. 2022, 71, 1–19. [Google Scholar]
- Mirza, H.A.; Raja, M.A.Z.; Chaudhary, N.I.; Qureshi, I.M.; Malik, A.N. A robust multi sample compressive sensing technique for DOA estimation using sparse antenna array. IEEE Access 2020, 8, 140848–140861. [Google Scholar]
- Zhang, Z.; Wen, F.; Shi, J.; He, J.; Truong, T.K. 2D-DOA estimation for coherent signals via a polarized uniform rectangular array. IEEE Signal Process. Lett. 2023, 30, 893–897. [Google Scholar]
- Ma, H.; Tao, H.; Xie, J.; Cheng, X. Parameters estimation of 3-D near-field sources with arbitrarily spaced electromagnetic vector-sensors. IEEE Commun. Lett. 2022, 26, 2764–2768. [Google Scholar]
- Zheng, Z.; Mu, S. 2-D Direction FindingWith Pair-Matching Operation for L-Shaped Nested Array. IEEE Commun. Lett. 2020, 25, 975–979. [Google Scholar]
- Li, J.; Ma, P.; Zhang, X.; Zhao, G. Improved DFT algorithm for 2D DOA estimation based on 1D nested array motion. IEEE Commun. Lett. 2020, 24, 1953–1956. [Google Scholar]
- Yu, Q.; Lei, Z.; Hu, H.; An, J.; Chen, W. A novel 2D off-grid DOA estimation method based on compressive sensing and least square optimization. IEEE Access 2019, 7, 113596–113604. [Google Scholar]
- Xiao, K.; Zhao, J.; He, Y.; Li, C.; Cheng, W. Abnormal behavior detection scheme of UAV using recurrent neural networks. IEEE Access 2019, 7, 110293–110305. [Google Scholar]
- Wang, K.; Shi, L.; Chen, T. Two-Dimensional Separable Gridless Direction-of-Arrival Estimation Based on Finite Rate of Innovation. IEEE Access 2021, 9, 17275–17283. [Google Scholar]
- Chen, H.; Chen, W.; Wang, Y.; Bian, K.; Xiang, N.; Li, K.; Zhang, Z. A Low Computational Cost Lightning Mapping Algorithm With a Nonuniform L-Shaped Array: Principle and Verification. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–10. [Google Scholar] [CrossRef]
- Tian, Y.; Mei, R.; Huang, Y.; Tang, X.; Cui, T. 2D-DOA Estimation in Arc-Array With a DNN Based Covariance Matrix Completion Strategy. IEEE Access 2022, 10, 57608–57620. [Google Scholar]
- Zhang, Y.; Wang, Y.; Tian, Z.; Leus, G.; Zhang, G. Efficient angle estimation for MIMO systems via redundancy reduction representation. IEEE Signal Process. Lett. 2022, 29, 1052–1056. [Google Scholar]
- Li, Z.; Zhang, X.; Shen, J. 2D-DOA estimation of strictly noncircular sources utilizing connection-matrix for L-shaped array. IEEE Wirel. Commun. Lett. 2020, 10, 296–300. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, Z.; Guo, Y. 2-D DOA estimation with imperfect L-shaped array using active calibration. IEEE Commun. Lett. 2020, 25, 1178–1182. [Google Scholar]
- Peng, Z.; Si, W.; Zeng, F. 2-D DOA estimation for L-shaped sparse array via joint use of spatial and temporal information. IEEE Commun. Lett. 2020, 24, 1934–1938. [Google Scholar]
- Tang, W.G.; Jiang, H.; Pang, S.X. Grid-free DOD and DOA estimation for MIMO radar via duality-based 2D atomic norm minimization. IEEE Access 2019, 7, 60827–60836. [Google Scholar]
- Ohmae, A.; Yagitani, S. Direction-of-Arrival Estimation With Planar Luneburg Lens and Waveguide Metasurface Absorber. IEEE Access 2023, 11, 21968–21976. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, J.K.; Zhang, X.P.; Zheng, R. Multiple-Target Localization by Millimeter-Wave Radars With Trapezoid Virtual Antenna Arrays. IEEE IoT J. 2022, 9, 19589–19598. [Google Scholar]
- Zhao, P.; Wu, Q.; Chen, Z.; Hu, G.; Wang, L.; Wan, L. Generalized Nested Array Configuration Family for Direction-of-Arrival Estimation. IEEE Trans. Veh. Technol. 2023, 72, 10380–10392. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, Z.; Liu, W.; Tian, Y.; Wang, G. Conjugate augmented decoupled 3-D parameters estimation method for near-field sources. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4681–4689. [Google Scholar]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Improved two-dimensional DOA estimation using parallel coprime arrays. Signal Process. 2020, 172, 107428. [Google Scholar]
- Ye, Z.; Liu, C. 2-D DOA estimation in the presence of mutual coupling. IEEE Trans. Antennas Propag. 2008, 56, 3150–3158. [Google Scholar]
- He, D.; Chen, X.; Pei, L.; Zhu, F.; Jiang, L.; Yu, W. Multi-BS spatial spectrum fusion for 2-D DOA estimation and localization using UCA in massive MIMO system. IEEE Trans. Instrum. Meas. 2020, 70, 1–13. [Google Scholar]
- Niu, C.; Zhang, Y.; Guo, J. Interlaced double-precision 2-D angle estimation algorithm using L-shaped nested arrays. IEEE Signal Process. Lett. 2016, 23, 522–526. [Google Scholar]
- Liu, C.L.; Vaidyanathan, P.P. Hourglass arrays and other novel 2-D sparse arrays with reduced mutual coupling. IEEE Trans. Signal Process. 2017, 65, 3369–3383. [Google Scholar]
- Sun, L.; Yang, M.; Chen, B. Thermos array: Two-dimensional sparse array with reduced mutual coupling. Int. J. Antennas Propag. 2018, 2018, 3624514. [Google Scholar]
- Elbir, A.M. L-shaped coprime array structures for DOA estimation. Multidimens. Syst. Signal Process. 2020, 31, 205–219. [Google Scholar]
- Wu, F.; Cao, F.; Ni, X.; Chen, C.; Zhang, Y.; Xu, J. L-shaped sparse array structure for 2-D DOA estimation. IEEE Access 2020, 8, 140030–140037. [Google Scholar]
- Elbir, A.M. V-shaped sparse arrays for 2-D doa estimation. Circuits Syst. Signal Process. 2019, 38, 2792–2809. [Google Scholar]
- Rocca, P.; Hannan, M.A.; Salucci, M.; Massa, A. Single-snapshot DoA estimation in array antennas with mutual coupling through a multiscaling BCS strategy. IEEE Trans. Antennas Propag. 2017, 65, 3203–3213. [Google Scholar]
- Jackson, B.R. 2D Direction of Arrival Estimation Using Uniform Circular Arrays With Radiation Pattern Reconfigurable Antennas. IEEE Access 2022, 10, 11909–11923. [Google Scholar]
- Crisafulli, O.; Piazzese, N.I.; Pavone, S.C.; Giammello, G.; Galvagna, G.; Pitrulli, S.; Morabito, A.F.; Donato, L.D.; Sardo, M.; Sorbello, G. Performance Analysis of BLE-5.1 Angle of Arrival Estimation Using Embedded Radiation Patterns on a 3 × 3 Uniform Rectangular Array. IEEE Access 2024, 12, 42572–42584. [Google Scholar] [CrossRef]
- Hannan, M.A.; Crisafulli, O.; Pavone, S.C.; Di Donato, L.; Sorbello, G. Fast Direction of Arrival Estimation Using Subspace-Based Methods for BLE Applications. In Proceedings of the 2024 IEEE International Symposium on Antennas and Propagation and INC/USNC-URSI Radio Science Meeting (AP-S/INC-USNC-URSI), Florence, Italy, 14–19 July 2024; pp. 1457–1458. [Google Scholar] [CrossRef]
- Boddi, M.; Rosamilia, M.; Aubry, A.; De Maio, A. Iterative Calibration and Direction-of-Arrival Estimation for Uniform Circular Arrays Affected by Mutual Coupling. IEEE Sens. Lett. 2024, 8, 1–4. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, L.T.; So, H.C. Selective Range Iterative Adaptive Approach for High-Resolution DOA Estimation. IEEE Access 2019, 7, 15634–15640. [Google Scholar] [CrossRef]
- Shu, F.; Shi, B.; Chen, Y.; Bai, J.; Li, Y.; Liu, T.; Han, Z.; You, X. A New Heterogeneous Hybrid Massive MIMO Receiver With an Intrinsic Ability of Removing Phase Ambiguity of DOA Estimation via Machine Learning. IEEE Trans. Mach. Learn. Commun. Netw. 2025, 3, 17–29. [Google Scholar] [CrossRef]
- Zheng, S.; Yang, Z.; Shen, W.; Zhang, L.; Zhu, J.; Zhao, Z.; Yang, X. Deep Learning-Based DOA Estimation. IEEE Trans. Cogn. Commun. Netw. 2024, 10, 819–835. [Google Scholar] [CrossRef]
- Feng, Q.; Tang, T.; Wu, Z.; Zhang, Y.; Wang, D. A Deep Reinforcement Learning-Based Shortwave Multistation Autonomous Cooperative Direction Finding and Localization Method. IEEE Sens. J. 2024, 24, 40123–40136. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TC | |||||
|---|---|---|---|---|---|
| 1 | 10 | 5 | −5 | 25 | 5 |
| 2 | 10 | 10 | 0 | 0 | 0 |
| 3 | 10 | 15 | 5 | 25 | 5 |
| TC | ||||||
|---|---|---|---|---|---|---|
| 1 | [5, 10, 15] | [4, 9, 14] | −1 | 1 | 1 | 1 |
| 2 | [5, 10, 15] | [5, 10, 15] | 0 | 0 | 0 | 0 |
| 3 | [5, 10, 15] | [5, 9, 16] | 0 | 0.67 | 0.67 | 0.82 |
| 4 | [5, 10, 15] | [10, 15, 20] | 5 | 25 | 5 | 5 |
| 5 | [5, 10, 15] | [20, 10, 15] | 5 | 75 | 5 | 8.66 |
| TC | |||||
|---|---|---|---|---|---|
| 1 | (5, 90) | (5, 270) | 180 | 180 | 10 |
| 2 | (45, 90) | (45, 270) | 180 | 180 | 90 |
| 3 | (45, 90) | (45, 180) | 90 | 90 | 60 |
| 4 | (45, 90) | (5, 180) | 130 | 98.5 | 45.2 |
| Error Metric | Complexity | Example: |
|---|---|---|
| 6 | ||
| 7 | ||
| 19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hannan, M.A.; Crisafulli, O.; Giammello, G.; Sorbello, G. On the Error Metrics Used for Direction of Arrival Estimation. Sensors 2025, 25, 2358. https://doi.org/10.3390/s25082358
Hannan MA, Crisafulli O, Giammello G, Sorbello G. On the Error Metrics Used for Direction of Arrival Estimation. Sensors. 2025; 25(8):2358. https://doi.org/10.3390/s25082358
Chicago/Turabian StyleHannan, Mohammad Abdul, Ottavio Crisafulli, Giuseppe Giammello, and Gino Sorbello. 2025. "On the Error Metrics Used for Direction of Arrival Estimation" Sensors 25, no. 8: 2358. https://doi.org/10.3390/s25082358
APA StyleHannan, M. A., Crisafulli, O., Giammello, G., & Sorbello, G. (2025). On the Error Metrics Used for Direction of Arrival Estimation. Sensors, 25(8), 2358. https://doi.org/10.3390/s25082358