1. Introduction
Centralized radio access network (C-RAN) has become the primary wireless access network architecture for 5G due to its advantages: high capacity, high flexibility, and low latency. To meet demands for more stable and flexible communication, 5G C-RAN has evolved from a two-layer architecture consisting of a baseband unit and a remote radio unit in 4G LTE to a three-layer architecture comprising a central unit (CU), a distributed unit (DU), and an active antenna unit (AAU) [
1]. The communication link between the CU and DU is referred to as the midhaul, while the link between the DU and AAU is known as the fronthaul. Mobile fronthaul (MFH) extends the fronthaul to meet the demands of mobile communication environments, imposing higher requirements on data-transmission rates and network coverage to ensure a stable and high-quality user experience.
With the advancement of the Internet of Things, an increasing number of devices, such as smart cars, low-altitude drones, and intelligent robots, rely on the high-capacity and low-latency communication capabilities of 5G. To meet the needs of these devices with regard to wireless communication, 5G and future 6G systems will expand into the millimeter-wave (mm-wave) frequency bands [
2,
3]. With the increase in operating frequency bands, multi-band applications, such as multi-band sensing, are emerging as important components of 5G and 6G systems beyond their basic communication functions. Considering the stronger line-of-sight (LOS) transmission characteristics and higher free-space loss of mm-waves compared to lower-frequency electromagnetic waves, the deployment density of AAU needs to be significantly increased to meet signal-coverage requirements. If traditional digital fiber transmission technology based on the common public radio interface protocol is employed to implement the MFH, its inherent bandwidth limitations and the requirement for frequency-conversion devices at the base station will significantly escalate deployment costs when mm-waves are employed. In contrast, MFH networks based on analog radio-over-fiber (ROF) technology leverage the advantages of ROF technology such as large bandwidth, low loss, and high frequency and particularly leverage its ability to directly transmit radio frequency (RF) signals over fiber. This avoids the need to deploy devices with frequency-conversion functionality and digital interfaces at the base station, thus offering better cost efficiency with higher transmission capacity.
However, analog ROF-based MFH networks may encounter dispersion and nonlinear interference during transmission, which can degrade signal-transmission performance. In comparison, digital fiber-based MFH networks can maintain high-quality signal transmission by integrating technologies such as forward error correction [
4]. Therefore, in the current research literature on analog ROF, various solutions have been proposed to ensure the high performance of analog signal transmission through the optical fiber [
5,
6,
7].
In mm-wave wireless communications, beamforming is commonly achieved through phased array antennas (PAAs), which aim to enhance signal strength in specific directions. This effectively compensates for the propagation loss of signals in free space and improves the quality of wireless communications. Traditional PAA systems rely on coaxial cables or waveguides for signal transmission; these are characterized by their large size, heavy weight, and significant signal loss. In contrast, optical PAA systems use optical fibers instead of traditional cables, offering several distinct advantages: smaller size, lighter weight, larger bandwidth, immunity to electromagnetic interference, and reduced transmission loss. Although electronic-based beamforming schemes are currently widely used, they face issues of “beam squint” and “electronic bottleneck” when operating in broadband [
8].
In early optical beamforming methods, beamforming was achieved by introducing different delays to the optical signal carrying wireless signals across different optical links. In this case, multiple parallel long optical fibers are required for remote beamforming, resulting in a complex system structure. To address this issue, some remote beamforming schemes based on multi-core fibers have been proposed [
9,
10] that greatly simplify the transmission link. Apart from the introduction of different delays to the same optical signal using different channels, multi-wavelength technology can also be employed, leveraging the different delay characteristics of different wavelengths in the same medium to achieve different delays for signals within a single transmission channel [
11,
12,
13]. The scheme in [
11] employs a dispersion-shifted fiber, utilizing the delay induced by dispersion for remote control of the beam direction. Several single-mode-fiber (SMF)-based remote beamforming schemes have also been proposed [
12,
13]. In [
12], the beam direction is jointly controlled by a set of fixed wavelengths and a group of variable optical delay lines. The scheme in [
13] controls the beam direction solely based on the wavelength of the laser source. However, the scheme in [
13] requires a large number of electro-optic modulators in the central station, leading to increased costs for the MFH network.
Although global positioning systems (GPS) perform excellently in outdoor environments, their accuracy is significantly reduced indoors due to difficulties with signal penetration through buildings [
14]. Therefore, indoor positioning assisted by wireless technologies is a research hotspot and has been implemented using ultrasonic sensors, infrared systems, RF identification tags, ultra-wideband signals, Bluetooth beacons, and Wi-Fi networks [
15,
16].
However, apart from the commonly adopted indoor Wi-Fi devices, other wireless positioning technologies often require the deployment of dedicated hardware indoors, which is not only costly but also difficult to implement on a large scale. With the development of 5G and, in the future, 6G, the widespread deployment of AAUs in indoor environments will offer new hardware capabilities and the means for indoor positioning. Thus, combining ROF-based 5G MFH with indoor positioning represents an area of significant research importance [
17,
18].
In complex indoor scenarios, conventional positioning techniques face significant challenges [
19]. Angle-based methods experience reduced accuracy as reflected signals distort direction-of-arrival measurements, while time-based approaches encounter obstacles to distinguishing the direct signal path from overlapping reflections. Machine learning approaches address these problems through data-driven feature learning, enabling the effective characterization of nonlinear propagation dynamics in scenarios with rich multipath components. This capability allows such methods to model complex signal behavior comprehensively, thereby enhancing the accuracy and reliability of indoor positioning systems. The data required for machine learning-based methods can be obtained via received signal strength indication (RSSI) [
20,
21] or channel state information (CSI) [
22,
23,
24]. For example, in transmitting a data resource block (RB) containing multiple orthogonal frequency division multiplexing (OFDM) symbols, the RSSI-based method marks the average power of the RB as a characteristic value, while the CSI-based method involves parsing the OFDM RB, analyzing the CSI of each subcarrier after it passes through the channel, and using thus as a characteristic value to achieve positioning through intelligent algorithms.
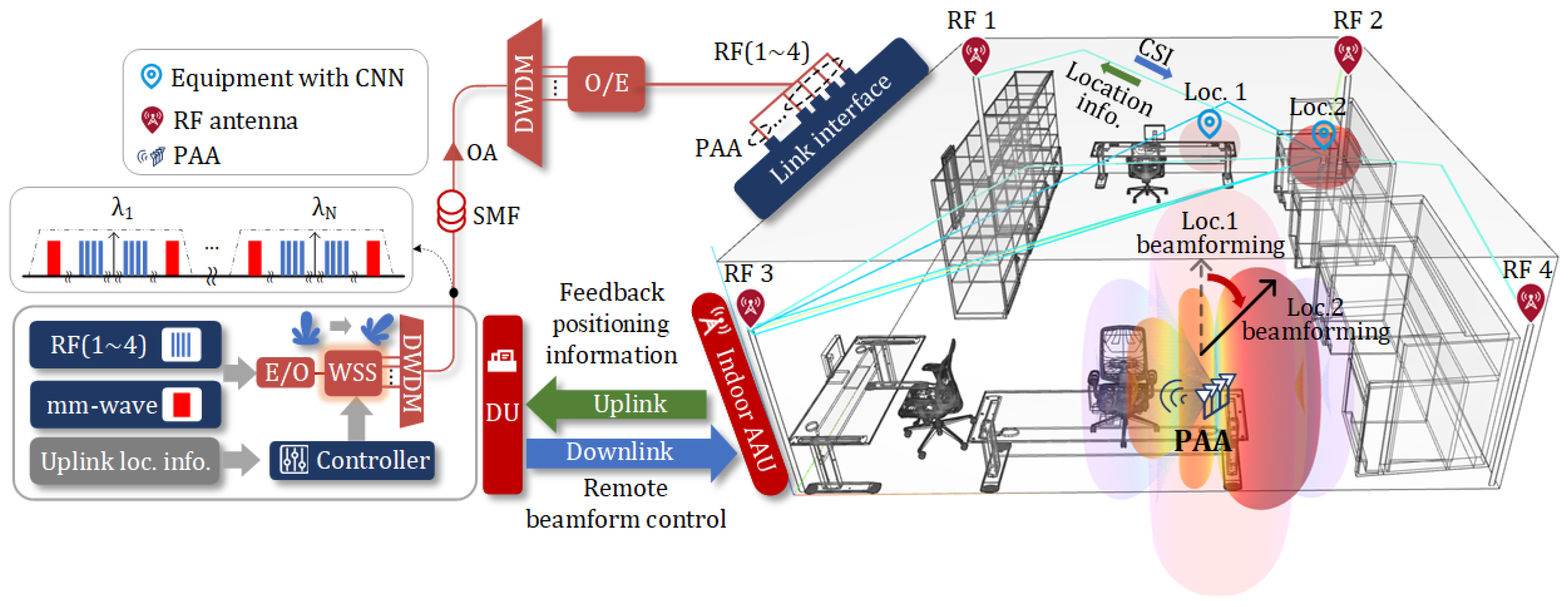
In this work, we propose a multi-band analog ROF-MFH with remote beamforming and indoor positioning capabilities. A schematic diagram and application scenario are illustrated in
Figure 1. At the DU end, a wavelength-selective switch (WSS) is used to select a group of specific optical wavelengths carrying vector signals centered at 3, 4, 5, and 6 GHz for indoor positioning for low-speed wireless access and vector signals centered at 30 GHz for high-speed wireless access. Different wavelengths create varying delays due to dispersion when they are transmitted through SMF, forming an optical true time delay pool (OTTD-P) [
13]. This allows the DU to control the beam direction of the AAU’s PAA. Additionally, low-frequency RF vector signals in OFDM format are used for indoor positioning, in addition to low-speed wireless communications. When four omnidirectional transmitting antennas are fixed in the four corners of the room and the receiving antenna is located anywhere indoors, the different wireless channels result in varying CSI values for the OFDM subcarriers. These varying CSI values are used to train a convolutional neural network (CNN) with positioning capabilities. Once the CNN is trained, it is embedded in the receiving device, enabling it to obtain its location in real time and feed this information back to the DU via the uplink from the AAU. This enables the adjustment of the mm-wave beam direction to align with the target device, thereby improving the reception quality of the mm-wave vector signal for high-speed wireless communications. This integrated architecture incorporates remote beamforming and indoor positioning technologies that can address challenges in diverse scenarios. In urban office buildings and household environments, ROF-based remote beamforming and CSI-based indoor positioning can provide precise information on target location, thereby enabling high-speed data connections. Furthermore, the architecture can also be used to enhance industrial automation and infrastructure management in commercial buildings. For rural areas, the proposed method can provide cost-effective means of target location and information transmission in applications such as greenhouse monitoring and telemedicine. Additionally, centralized beam control significantly reduces the cost of infrastructure deployment in any scenario. Simulation results show that in a 3D model of the Microwave Photonics Laboratory at East China Normal University, the average accuracy of localization classification can reach 86.92%, with six distinguished beam directions for the PAA achieved via the OTTD-P. In optical link transmission, when the received optical power (ROP) is 10 dBm, the error vector magnitudes (EVMs) of vector signals in all frequency bands remain below 3%. Regarding the wireless transmission layer, two beam directions were selected for verification. Once the beam is aligned with the target device at the highest gain and the received signal is properly processed, the EVM of mm-wave vector signals is better than 11%.
3. Simulation Results
A simulation based on the setup shown in
Figure 2 was carried out to verify the proposed multi-band analog ROF-MFH with remote beamforming and capabilities for indoor positioning. In the DU, the MLS generates a total of 24 wavelengths with a fixed frequency interval of 100 GHz. The frequencies of the first and last wavelengths are 193.1 THz and 195.4 THz, respectively. All the wavelengths have a linewidth of 10 MHz and a power of 20 dBm. The length of the SMF between the DU and AAU is set to 10 km. The DWDM and WSS have 24 channels and support operation at the aforementioned 24 optical wavelengths. RF vector signals with frequencies of 3, 4, 5, and 6 GHz and mm-wave vector signals with a frequency of 30 GHz are all 16-quadrature amplitude modulation (QAM) OFDM signals. The baud rates of the RF vector signal and the mm-wave vector signal are 40 Mbauds/s and 1Gbauds/s, respectively. In the simulation, the number of subcarriers of 16-QAM OFDM signals is set to 64. Among the RF vector signals for indoor positioning, 56 subcarriers are used to carry effective information and the remaining eight subcarriers are used as pilots. Each RB transmits 100 OFDM symbols. In each RB, the first 30 OFDM symbols are fixed sequences used to obtain CSI and the other 70 symbols are used to transmit effective data for low-speed wireless access.
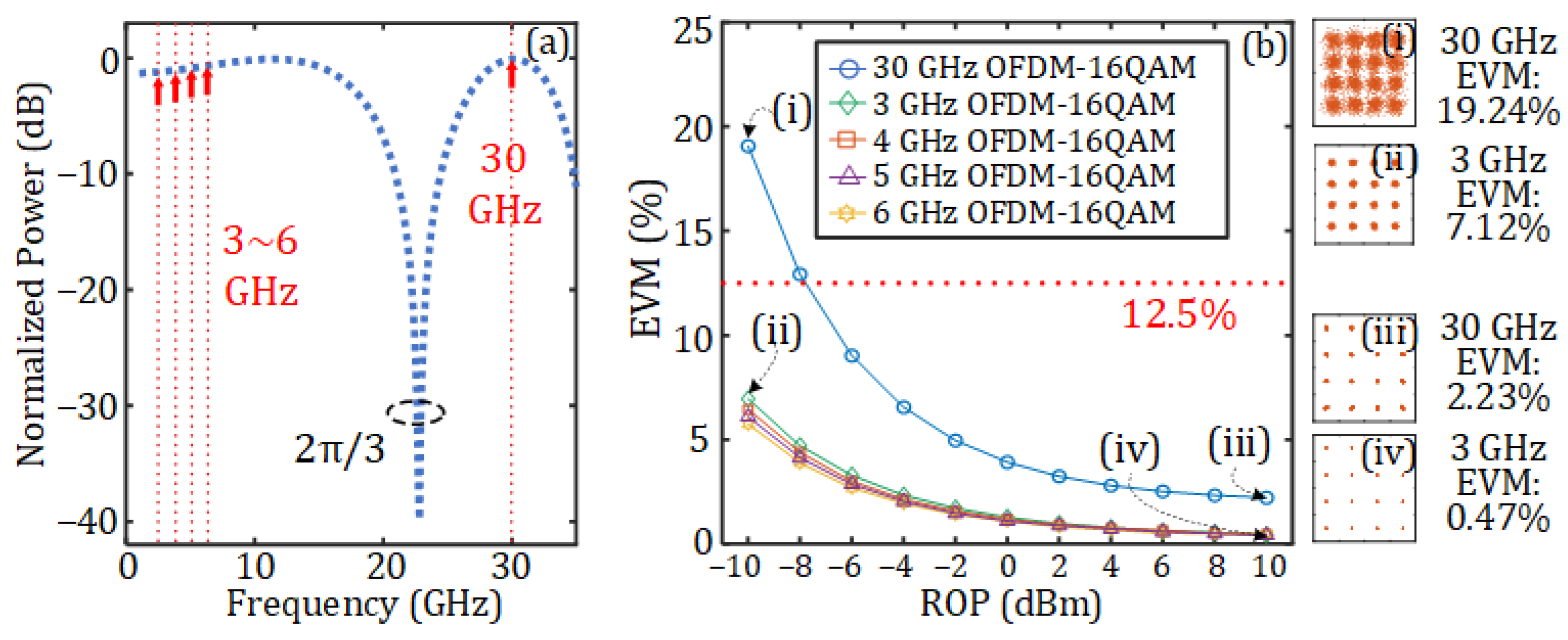
Since double-sideband (DSB) modulation is used at the DU, fiber dispersion will introduce a periodic power fading on the recovered electrical signal at the AAU. When the SMF length between the DU and the AAU is 10 km, the normalized power of the recovered electrical signal under different carrier frequencies and different static phases
φ is as shown in
Figure 4a. It can be observed that when the static phase
φ introduced by the PC is 2π/3, the attenuation of the 30 GHz mm-wave signal used in this work is minimized.
Figure 4b illustrates the EVMs of 16-QAM OFDM vector signals at different frequencies under various static phases
φ after transmission through the 10 km SMF. The ROP here is 10 dBm. It can be observed that the mm-wave signal exhibits the minimum EVM when the static phase
φ = 2π/3. When
φ = 0 and π/6, the EVM of vector signals at one frequency will exceed the 3GPP-specified minimum threshold for 16-QAM (12.5%). Therefore,
φ is set to 2π/3 in the subsequent simulations. Besides, when
φ = 2π/3, the four RF vector signals also have very low levels of power attenuation.
Figure 4c illustrates the relationship between the normalized power and fiber length when
φ = 2π/3 and the signal frequency is respectively set to 3, 4, 5, 6, and 30 GHz. As can be seen, when the fiber length is 10 km, the 30 GHz signal experiences no power fading and the 3, 4, 5, and 6 GHz signals only have very low levels of power fading (less than 3 dB).
The optical spectra of the first four optical wavelengths after modulation and transmission through the 10 km SMF are shown in
Figure 5a, and the corresponding electrical spectra are shown in
Figure 5b. As can be seen, four RF vector signals and one mm-wave vector signal are DSB-modulated onto the first four wavelengths. After fiber transmission and optical-to-electrical conversion, they are all recovered in the electrical domain.
Figure 6 further demonstrates the transmission performance of the five vector signals after they have passed through the 10 km SMF when the static phase is set to
φ = 2π/3.
Figure 6a shows the normalized power versus the signal frequency, while
Figure 6b provides a detailed comparison of the relationship between the ROP and the EVM for the five vector signals. As can be seen, the four RF vector signals exhibit similar variations in EVM, with the lower frequency demonstrating a slightly inferior EVM due to its marginally greater degree of power fading, as depicted in
Figure 6a. The 30 GHz mm-wave vector signal has a much worse curve due to its greater signal bandwidth and greater noise.
Figure 6b(i,ii), respectively, present the constellation diagrams of signals at frequencies of 30 and 3 GHz when the ROP is −10 dBm. The EVMs are 19.24% and 7.12%, respectively.
Figure 6b(iii,iv) show the constellation diagrams when the ROP is increased to 10 dBm, and the EVMs are greatly improved to 2.23% and 0.47%, respectively.
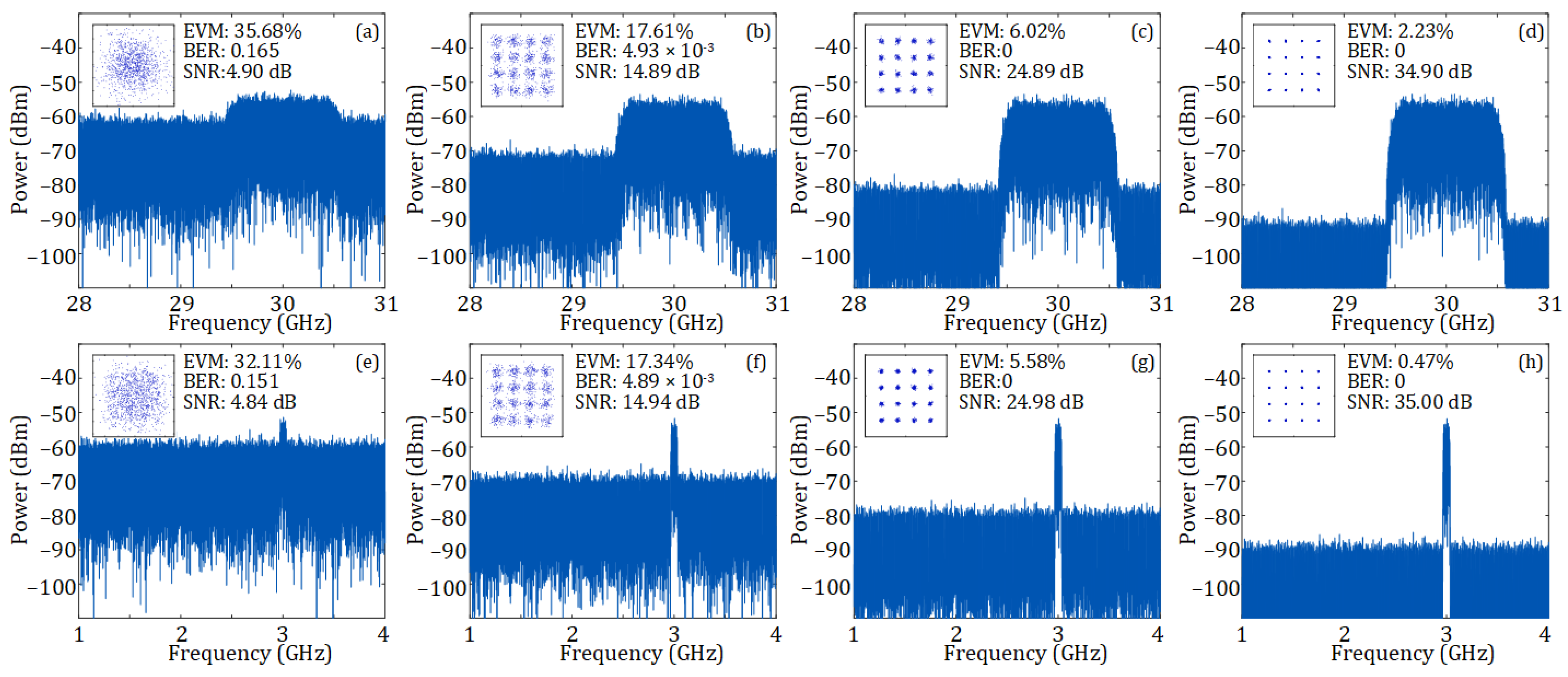
Figure 7a–h, respectively, present the electrical spectra of 30 and 3 GHz 16-QAM OFDM vector signals injected into the RF port of the DP-BPSK modulator under different SNRs, along with the constellation diagrams, bit error rates (BERs), and EVMs of these signals after fiber transmission. At an SNR of around 5 dB SNR, the 30 GHz vector signal has an EVM of 35.68% and a BER of 0.165, while the 3 GHz vector signal exhibits an EVM of 32.11% and a BER of 0.151. As the SNR increases, the EVM and BER of both signals are improved. These results confirm that the analog multi-band ROF link maintains phase coherence across frequencies, as is crucial for signal integrity.
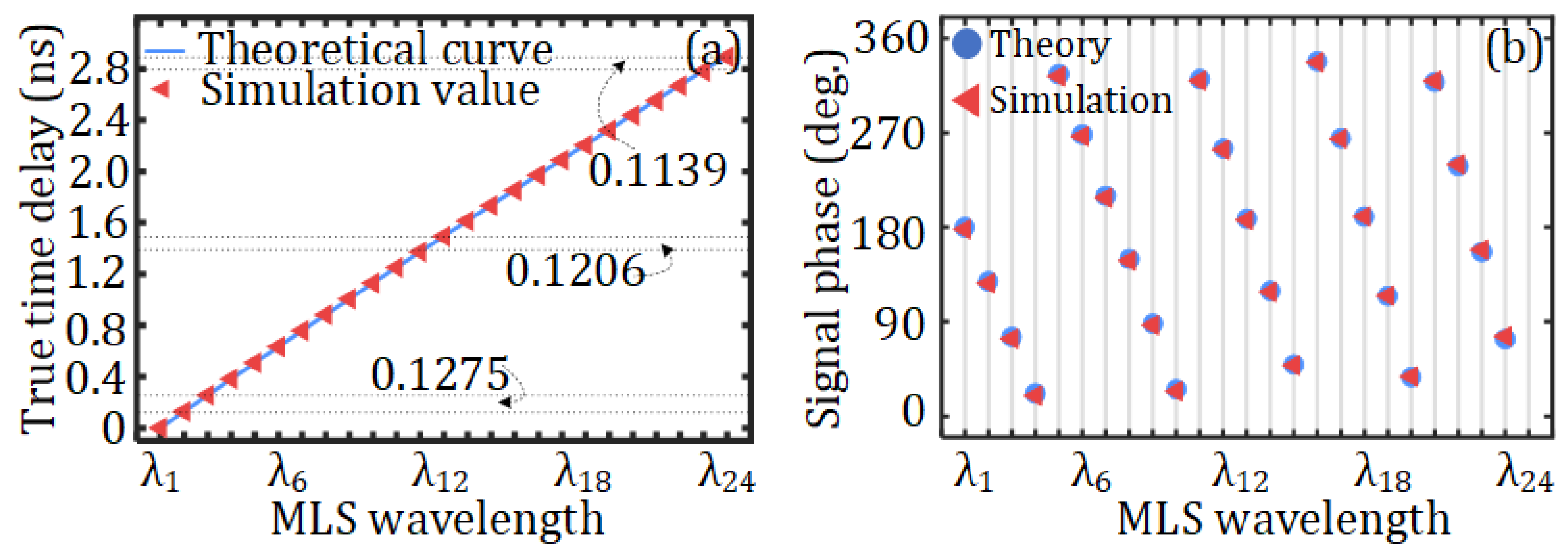
Then, the dispersion-induced time delay and phase shift using the 10 km SMF are studied. The true time delays and corresponding phase shifts for the 30 GHz mm-wave vector signal under the 24 different wavelengths are shown in
Figure 8a and
Figure 8b, respectively. In
Figure 8a, the time delay of
λ1 is used as a reference to plot the time-delay diagram for the 24 wavelengths. As can be seen from
Figure 8a, the theoretical delay is in good agreement with the results obtained from the simulation.
It is worth noting that the conversion between frequency and wavelength is not linear. Therefore, when the frequency interval is fixed at 100 GHz in this study, the corresponding wavelength interval does not remain constant; the delays are thus not precisely equidistant, as marked in
Figure 8a.
Figure 8b presents the theoretical phase values calculated in accordance with Equation (7) and the simulated phase values, which are respectively represented by circles and triangles. By comparing
Figure 8a to
Figure 8b, it can be seen that the results of theory and simulation are basically consistent.
Based on the phases corresponding to the 24 wavelengths mentioned above, four wavelengths are selected, and the phase-shifted electrical signals generated by these four selected wavelengths are fed to the four antenna elements of the PAA, respectively, so that different beam directions can be achieved. The design of the OTTD-P for an equidistant four-element PAA is illustrated in
Figure 9a. Six beam directions are designed and also shown in
Figure 9a. Each column of the DM in the DU represents a beam direction. The signal reaches the AAU after passing through the 10 km SMF that has a dispersion coefficient of 16 × 10
−6 s·m
−2. In the simulation, the center frequencies of the first and last light sources of MLS are 193.1 THz and 195.4 THz, respectively. In the DM, the matrix elements represent the wavelengths of the light sources. For example,
λ1 and
λ24 correspond to wavelengths centered at 1552.52 nm (193.1 THz) and 1534.24 nm (195.4 THz), respectively.
In the proposed scheme, the PAA in the AAU can achieve beam pointing in six directions. The theoretical and simulated antenna patterns are shown in the polar plots of
Figure 9a, where the dashed lines represent the theoretical antenna patterns, while the solid lines represent the simulated antenna patterns. It can be observed that the antenna pattern obtained from theoretical calculation is consistent with that obtained from the simulation.
Figure 9b shows the PCLM and the corresponding interconnections in the AAU for the six beam directions in
Figure 9a. The connections between the DWDM demultiplexer and the four OCs are completely determined by the PCLM. It can be observed that only 17 wavelengths are utilized in the DM of the DU and the PCLM of the AAU. Therefore, if only the six beams shown in
Figure 9a are used, the DU does not require the other seven wavelengths, meaning that the MLS needs to generate only 17 wavelengths.
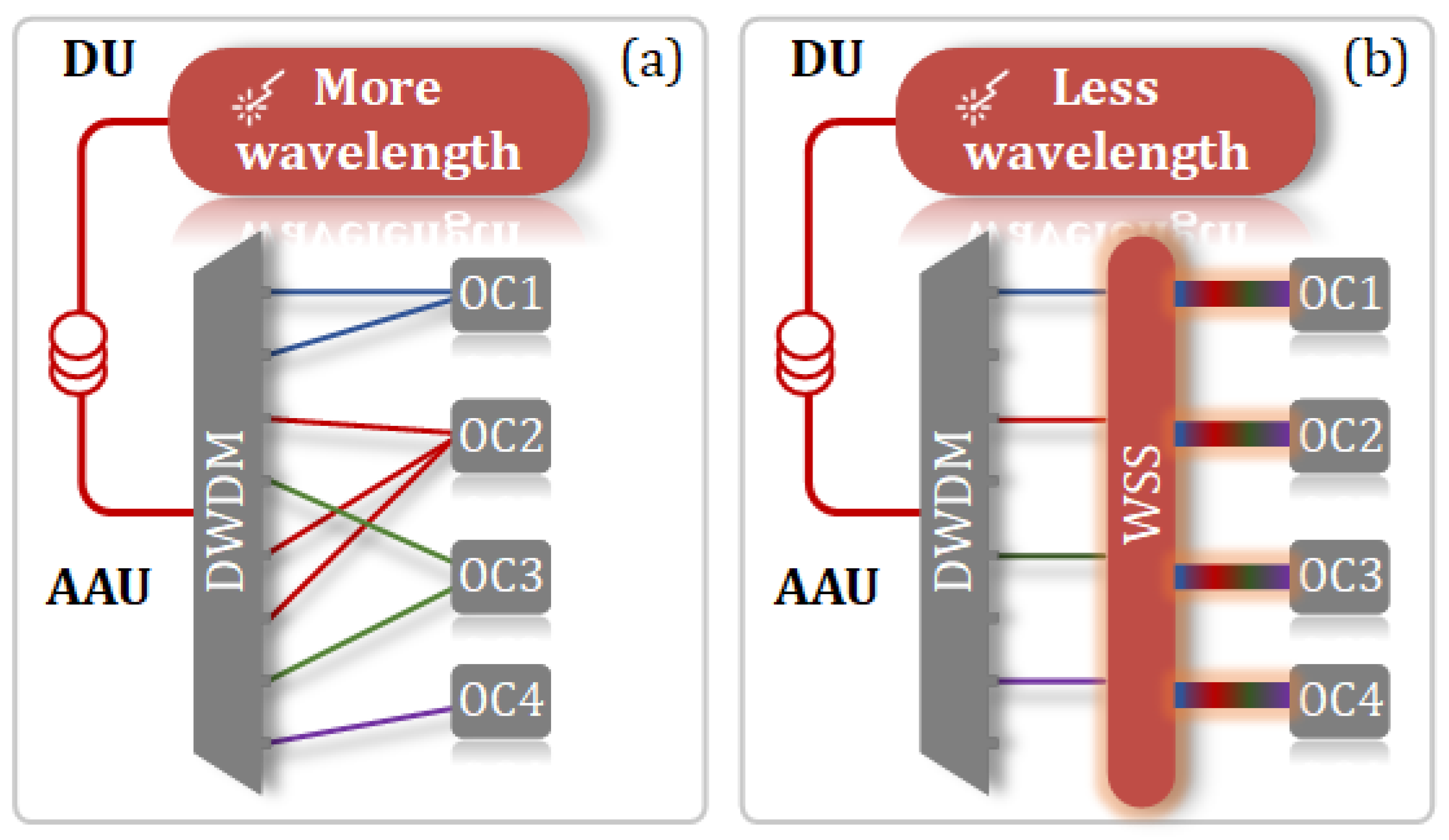
From the wavelength selection and allocation strategy presented in this work, as illustrated by the corresponding DM depicted in
Figure 9a and PCLM depicted in
Figure 9b, it can be observed that each column in the PCLM contains at most one “1”. This means that, regardless of the beam direction chosen, only one wavelength is transmitted to one OC via the PCLM. This design necessitates the use of 17 wavelengths to achieve six beam directions. The advantage of this design lies in the fact that the PCLM is entirely composed of passive components, as illustrated in
Figure 10a. Initially, our strategy aims to minimize the use of lasers; hence, it is possible to achieve six beam directions while using fewer than 17 wavelengths. However, this would result in some columns of the PCLM having two or more “1” s, necessitating the use of additional WSS at the PCLM for further wavelength selection. This would convert the PCLM into an active and more costly component, as shown in
Figure 10b. Given that the number of AAUs far exceeds the number of DUs, we ultimately chose the solution depicted in
Figure 10a.
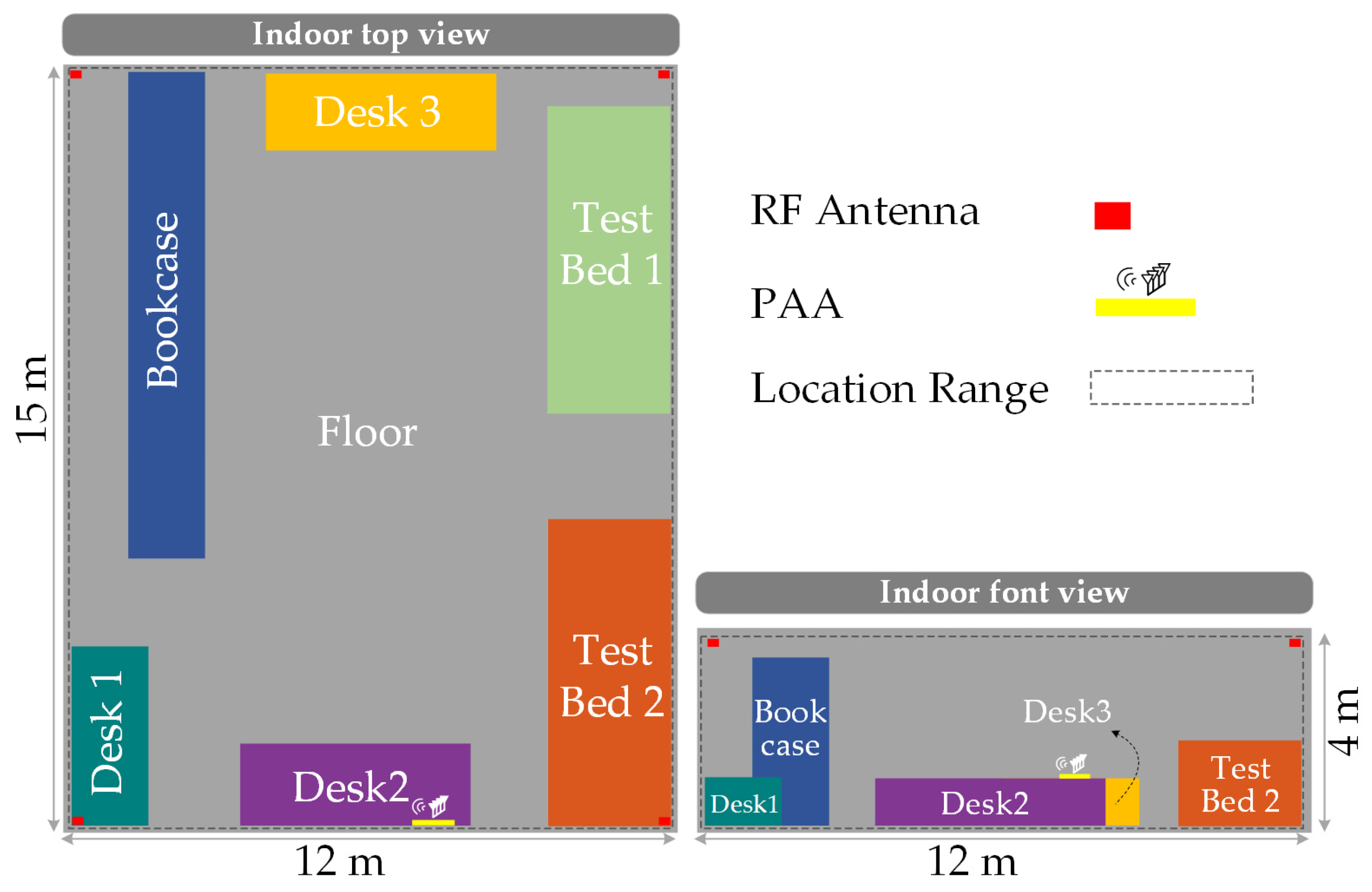
Next, a 3D model is established based on the Microwave Photonics Laboratory in East China Normal University, which is used to simulate the performance of the system proposed in this work in practical scenarios. The top view and front view of the 3D model used in the indoor simulation are shown in
Figure 11.
As shown in the figure, the dimensions of the 3D model are 15 × 12 × 4 m. Based on different types of objects, the indoor space is divided into seven regions: Floor, Desk 1, Desk 2, Desk 3, TestBed 1, TestBed 2, and Bookcase. These regions will be labeled accordingly during subsequent CNN training for classification learning. The four omnidirectional antennas are distributed in the four corners of the indoor space, while the PAA is placed near the Desk 2 area. The dashed regions represent the areas designated for setting receiving antennas during CNN training. In the simulation model, the reflection materials for the floor and walls are set to concrete, while those for the desk, testbed, and bookcase are configured as metal. The channel setup considers only signals with fewer than one reflection in order to balance data complexity and analytical feasibility. It should be noted that, in this work, we focus solely on training and positioning within the aforementioned seven regions. This represents a compromise and choice made in conjunction with the training tools we use, aimed at reducing the volume of CNN training data. In practical applications in the future, the regions can be further divided into more refined regions to obtain more precise positions for the targets.
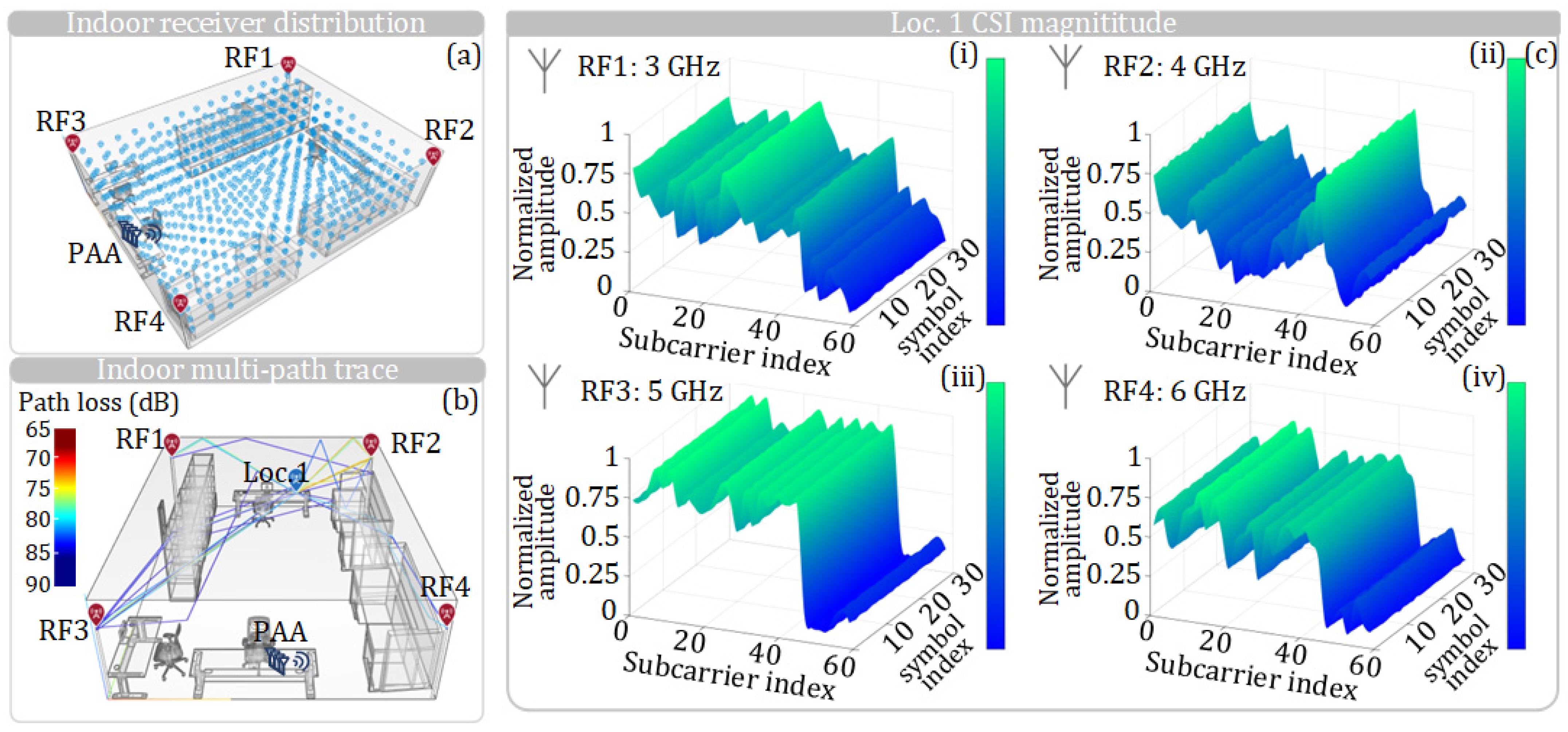
To train the CNN for positioning, the CSI at different positions in the indoor 3D space needs to be obtained in advance.
Figure 12a shows the distribution of receiving antennas used for collecting the CSI for training. Each point in
Figure 12a represents a location where a receiver should be placed to receive the four RF vector signals and obtain the CSI at that point. For a specific location, i.e., Loc. 1, on Desk 3 in the 3D model, the propagation path diagram is shown in
Figure 12b; only the direct path and the single-reflection path are considered.
When the receiver is at Loc. 1, the CSI amplitude responses of an RB transmitted by four RF omnidirectional antennas at different frequencies are shown in
Figure 12c. At Loc. 1, the receiver captures and analyzes the CSI amplitude responses obtained from four RF antennas, which are then fed into the CNN shown in
Figure 3 to train the network. From
Figure 12c, it can be observed that, due to the different locations of the four antennas, the signals of different frequencies received at Loc. 1 from different antennas exhibit distinct CSI amplitude responses. These differences are utilized as features for CNN training. It should be noted that to obtain a CNN with higher accuracy, a large amount of CSI data must be input. There are a total of 740 positions in the 3D model, and the low-frequency RF antennas from four corners send 40 RBs to each position under SNRs of 20, 25, and 30, respectively. Regarding the hardware configuration dedicated to CNN training, we employ a GPU, specifically the NVIDIA GeForce RTX 3090 graphics card. The CNN network undergoes 100 rounds of training iterations, with the entire training process lasting 48 min. After the CNN is fully trained by using the CSI amplitude responses at different locations, the CNN can be used for positioning. Then, the CSI information obtained by a receiver, which needs to determine its position, is fed to the CNN. Through this CNN, the CSI amplitude response is matched with the pre-trained location labels and CSI amplitude response features in the network, thereby enabling the positioning of the receiver.
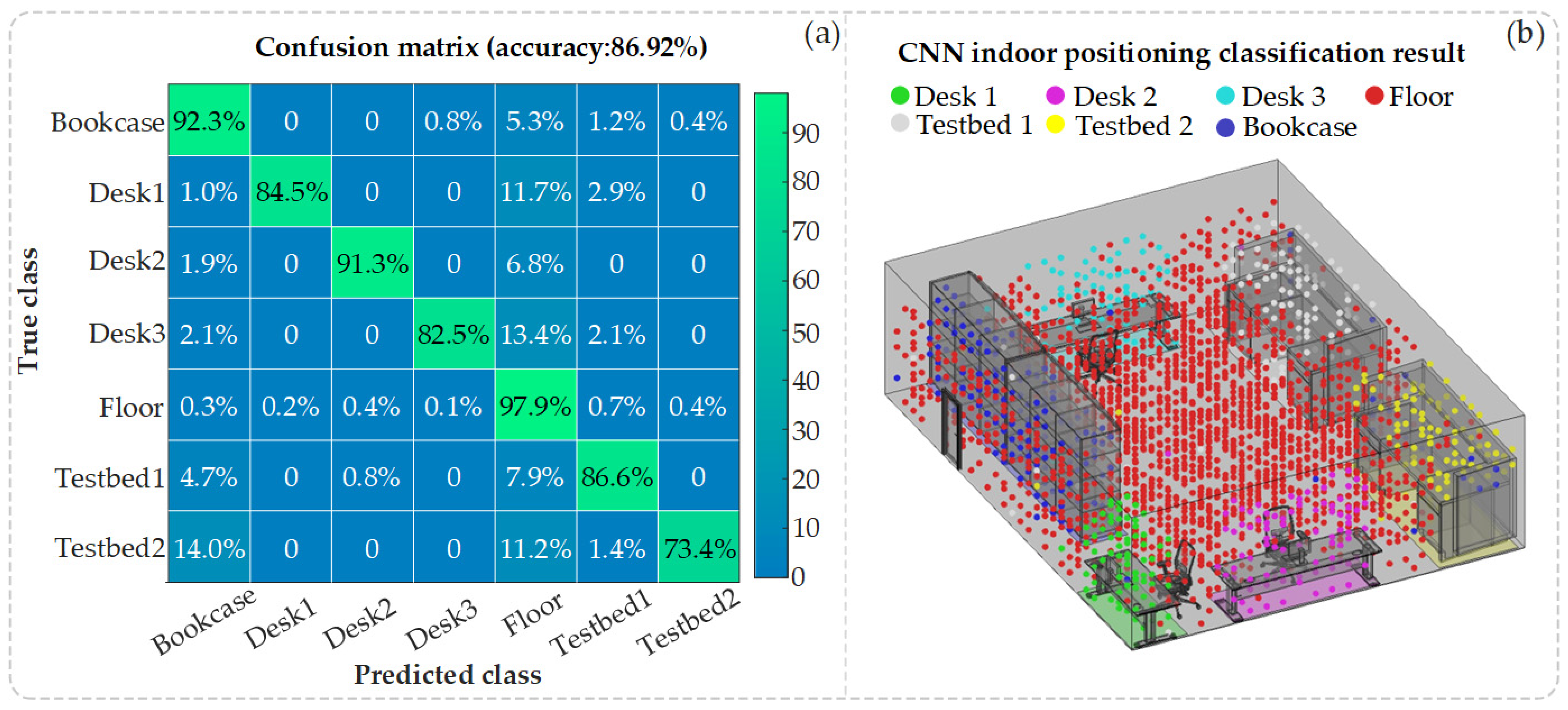
Figure 13a,b present, respectively, the probability confusion matrix and an illustrative diagram depicting the predicted classifications obtained following CNN training on the CSI dataset. Upon validation with the test set, the CNN model, once trained, exhibits an average location classification accuracy of 86.92%. This accuracy was determined by calculating a weighted average of the correctly predicted diagonal elements within the confusion matrix.
According to the confusion matrix, the Floor region has the highest positioning accuracy, at 97.9%. This is primarily because the Floor region covers a wide area with the most receiving points and because the space is flat, without grooves; as a result, higher CSI amplitude values are received from four directions, making the features easier to distinguish. The probability of other locations being misclassified as the Floor is also high. This phenomenon arises partly because the Floor area is large and partly because the CSI characteristics of relatively open planes at other locations are similar to the CSI characteristics of the Floor, with higher CSI amplitude values. The positioning accuracy of Bookcase ranks second. This is mainly because there are multiple grooves in Bookcase, which are easily affected by channel shadowing, resulting in low CSI amplitude values. There is also a high possibility of other locations being misclassified as Bookcases. Testbed 2 has the lowest positioning accuracy, with the highest probability of being misclassified as Floor or Bookcase. Despite the fact that Testbed 1 and Testbed 2 ought to possess comparable classification accuracy owing to their identical structural configurations, Testbed 2 is situated nearer to the indoor space’s corner (please refer to
Figure 11). Therefore, Testbed 2 has a higher probability of being misclassified as Bookcase due to the lower CSI amplitude characteristics. It is worth noting that, due to the high density of receiving points in the test dataset,
Figure 13b selectively presents the classification judgments of only a subset of these points for clarity. The precision of the CNN model is primarily determined by the outcomes of the confusion matrix. In practical applications, considering the complexities of indoor scenarios, as discussed in [
26], a general model can be pre-trained using simulated and real-world data. As suggested in [
27], this model can then be fine-tuned with new scenario-specific data, leveraging collaborative positioning strategies between simulation and actual data to enhance adaptability and efficiency and reduce training costs.
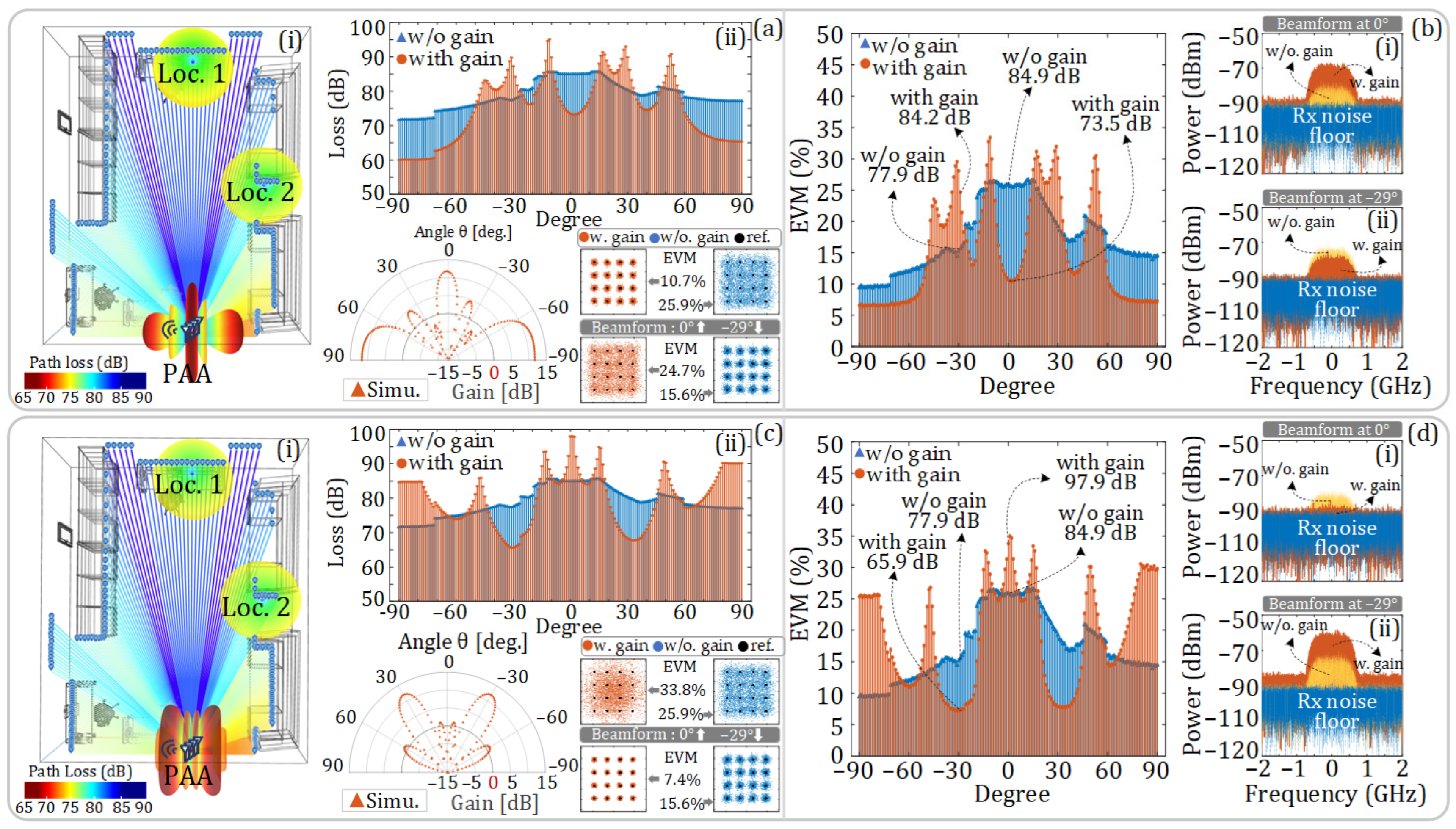
After indoor positioning is achieved, the beam direction of the PAA can be aligned with the target through remote beamforming. As shown in
Figure 14a,c, in this simulation, Loc. 1 and Loc. 2 are selected as the positions of the receivers in the 3D model, and the receiving antennas are set as omnidirectional antennas. To make the beams point to these two locations, Beam Direction 1 and Beam Direction 4 are selected from the six designed beam directions shown in
Figure 9. The corresponding antenna patterns of the PAA are presented in the polar coordinates of
Figure 14a and
Figure 14c, respectively.
In this simulation, the SNR of the signal at the transmitter side is set to 23 dB and the noise floor of the receiver is configured as −147.02 dBm/Hz. Given that the simulation comprehensively considers the influences of beam gain, free-space loss on signal propagation, and the noise floor of the receiver, the SNR of the signal at the receiver is not constant. Besides, in this simulation, only the LOS channel is considered. In dense and complex indoor environments with frequent non-line-of-sight (NLOS) scenarios, multipath propagation and shadowing severely degrade beamforming performance. To address this issue, the proposed method can adjust the beam direction of PAA based on the positions obtained through CNN-based positioning, establishing data-transmission links through reflective paths. Considering the limited transmitting power and the complex indoor environment, a better approach is to further integrate intelligent reflecting surfaces (IRS) [
28] indoors, cooperating with PAA to reconstruct the channel environment. Additionally, deep learning-based approaches [
29] can be adopted for dynamic beamforming, mitigating multipath effects in complex scenarios.
Figure 14a(i),c(i) show the schematic diagram of the LOS free-space loss from –90 degrees to +90 degrees in the 3D model. In addition to Loc. 1 and Loc. 2, we have deployed multiple receivers at other locations shown in the figures.
Figure 14a(ii),c(ii) show the loss of signals received by the receivers at different angles in the diagrams with and without considering the beam gain. It can be seen that the free-space loss of the signal increases with the increase in distance. After the beam gain is introduced, at the target position of 0 degrees or −29 degrees, the free-space loss is greatly compensated for.
Figure 14b and
Figure 14d, respectively, show the EVM of the signals received by the receivers at different angles when the antenna pattern in
Figure 14a,c are employed. Meanwhile, the electrical spectra of the received signals at 0 degrees and −29 degrees are also given. There, the blue dotted line represents the noise floor of the receiver; the red solid line represents the received signal spectrum with beam gain; and the yellow dotted line represents the received signal spectrum without beam gain.
When the receiver is located at Loc. 1, if the antenna pattern in
Figure 14a is adopted, the main lobe of the PAA is aligned with Loc. 1 at 0 degrees. In this case, the loss of the signal at Loc. 1 is improved from 84.9 dB to 73.5 dB and the EVM is improved from 25.9% to 10.7%. The corresponding constellation diagrams and electrical spectra are shown in
Figure 14a and
Figure 14b(i), respectively. In the direction of −29 degrees, pointing at Loc. 2, the losses with and without beam gain are 84.2 dB and 77.9 dB, respectively, and the corresponding EVMs of the received signals are 24.7% and 15.6%, respectively. Since the beam gain in this direction is negative, the transmission performance of the signal is worse when the PAA is employed. The corresponding constellation diagrams and electrical spectra are shown in
Figure 14a and
Figure 14b(ii), respectively.
When the receiver is located at Loc. 2, if the antenna pattern in
Figure 14c is adopted, the main lobe of the PAA is aligned with Loc. 2 at −29 degrees. In this case, the loss of the signal at Loc. 2 is improved from 77.9 dB to 65.9 dB, and the EVM is improved from 15.6% to 7.4%. The corresponding constellation diagrams and electrical spectra are shown in
Figure 14c and
Figure 14d(ii), respectively. In the direction of 0 degrees, pointing at Loc. 1, the losses with and without beam gain are 97.9 dB and 84.9 dB, respectively, and the corresponding EVMs of the received signals are 33.8% and 25.9%, respectively. The beam gain at 0 degrees is negative, so the transmission performance of the signal in this direction is worse when the PAA is employed. The corresponding constellation diagrams and electrical spectra are shown in
Figure 14c and
Figure 14d(i), respectively.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}