
The Parameter-Optimized Recursive Sliding Variational Mode Decomposition Algorithm and Its Application in Sensor Signal Processing
Abstract
1. Introduction
2. Algorithm Principles
2.1. Algorithm Fundamentals
2.2. Parameter-Optimized RSVMD Algorithm
2.2.1. Supplementary Constraints for Convergence Conditions
2.2.2. Optimization of Center Frequency and Modal Components
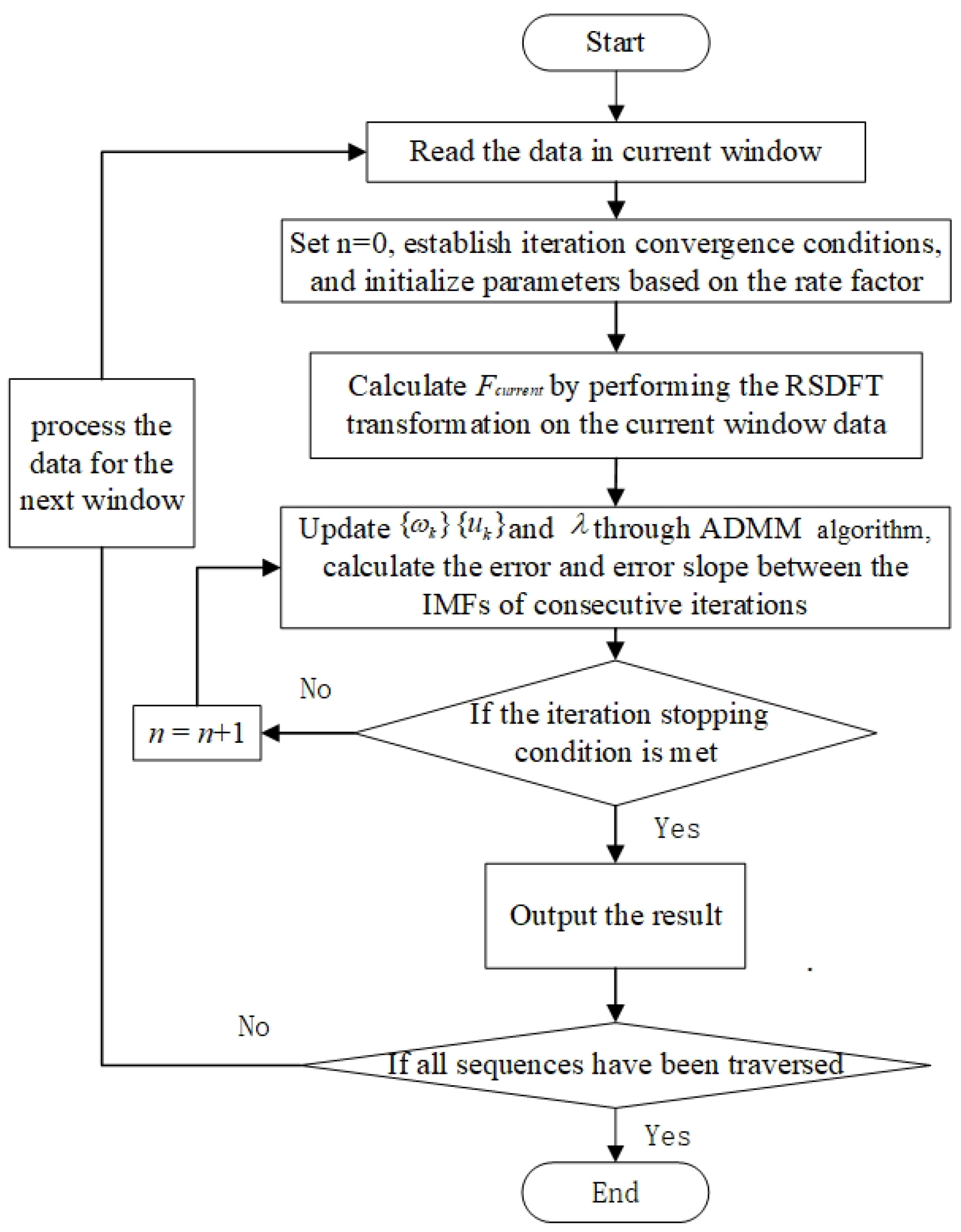
2.2.3. Algorithm Implementation Workflow
- (1)
- Read the current time data input value based on the pre-designed sliding window.
- (2)
- Initialize the parameters by setting the Lagrange multiplier and the number of iterations n to 0. Use the decomposition results from the previous window signal to initialize the input parameters for the current window. Assign the center frequency and intrinsic modal component from the previous window’s output to the initial center frequency and initial modal component of the current window.
- (3)
- Perform sliding discrete Fourier transform, and calculate the spectrum information of the current window using the spectrum of the previous frame data and the new and old data before and after the update, that is, Formula (7).
- (4)
- Iterate to calculate the optimal solution; enter the internal iterative operation of VMD; solve the optimal variational decomposition of the current time data using the ADMM method; substitute the updated frequency spectrum, modal components, and central frequency under the corresponding iteration times into Formulas (8) and (9) to update the modal components and central frequency; and calculate the relative error and absolute error of this iteration according to Formulas (10) and (11).
- (5)
- Set . If n is less than the maximum number of iterations at this time, or both the absolute and relative errors are less than the preset accuracy, then the iteration will be stopped; otherwise, repeat step (4) until the iteration stop conditions are met. Please refer to Formulas (12) and (13) for the iteration stop conditions. Perform inverse Fourier transform and output the result of this window.
- (6)
- Slide the window with the specified step size to update the time series, and repeat steps (1) to (5) to perform Variational Mode Decomposition on the signal until all data have been processed.
3. Experimental Analysis and Results
3.1. Evaluation Metrics
3.2. Analysis of Unstable Performance Phenomenon of RSVMD and Optimization Results
3.2.1. Issue of Over-Decomposition
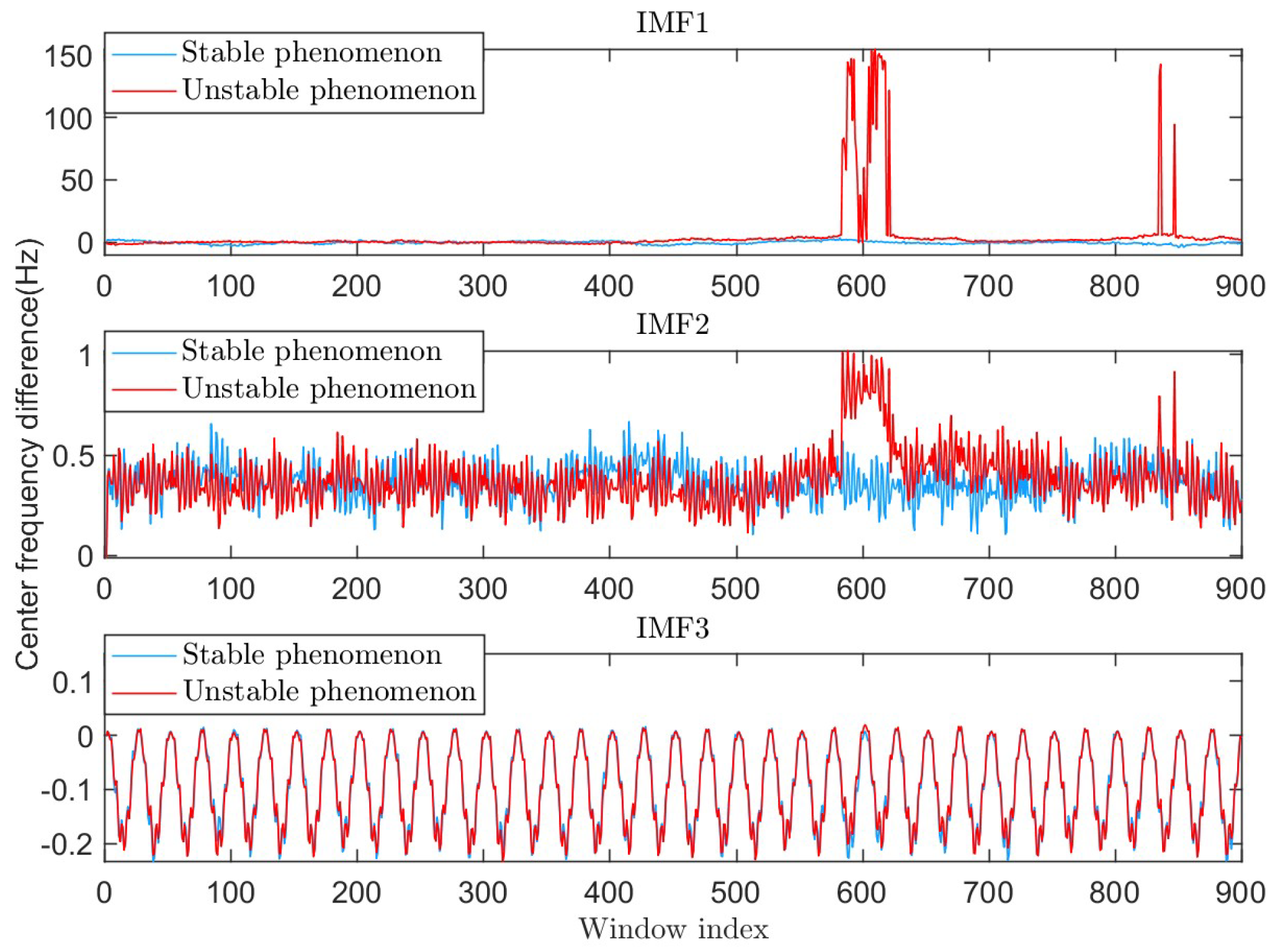
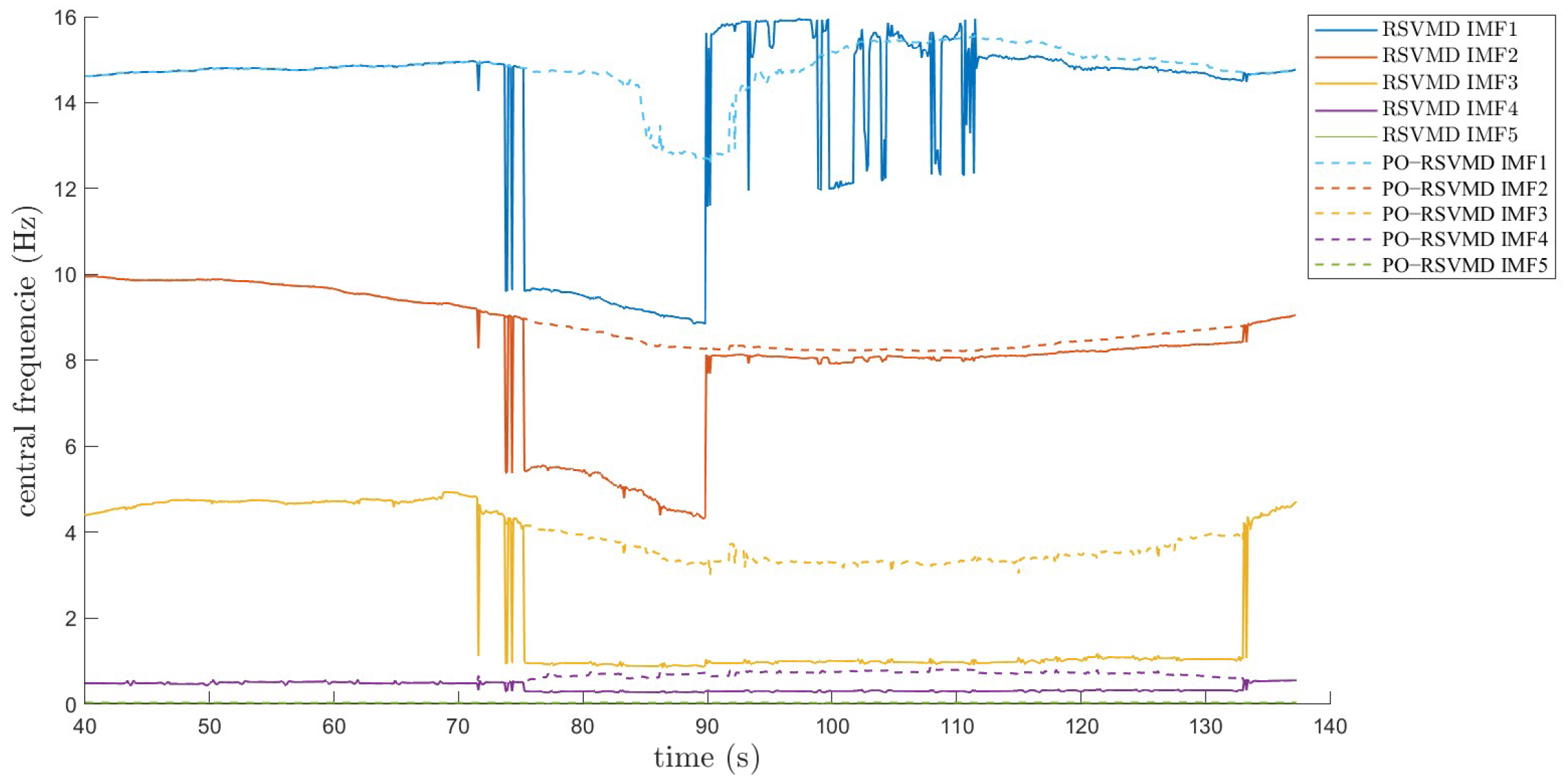
3.2.2. Issue of Increased Central Frequency Error
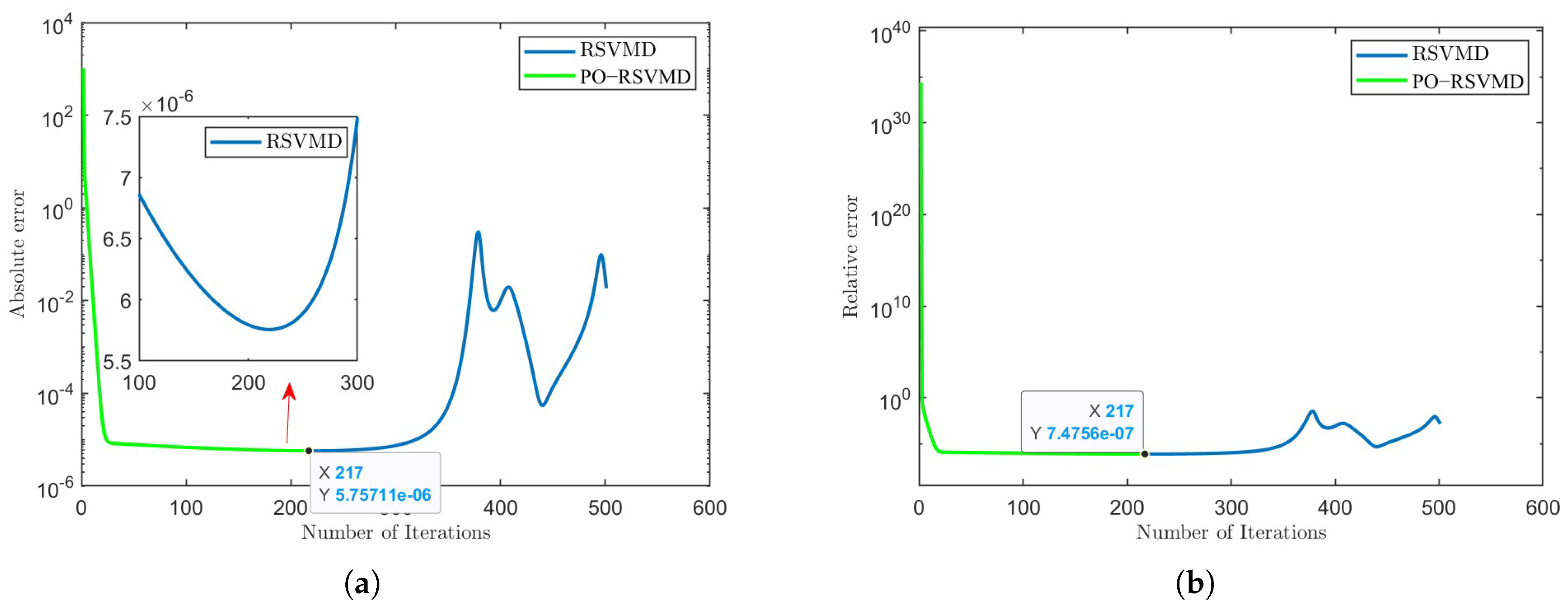
3.3. PO-RSVMD Algorithm Performance
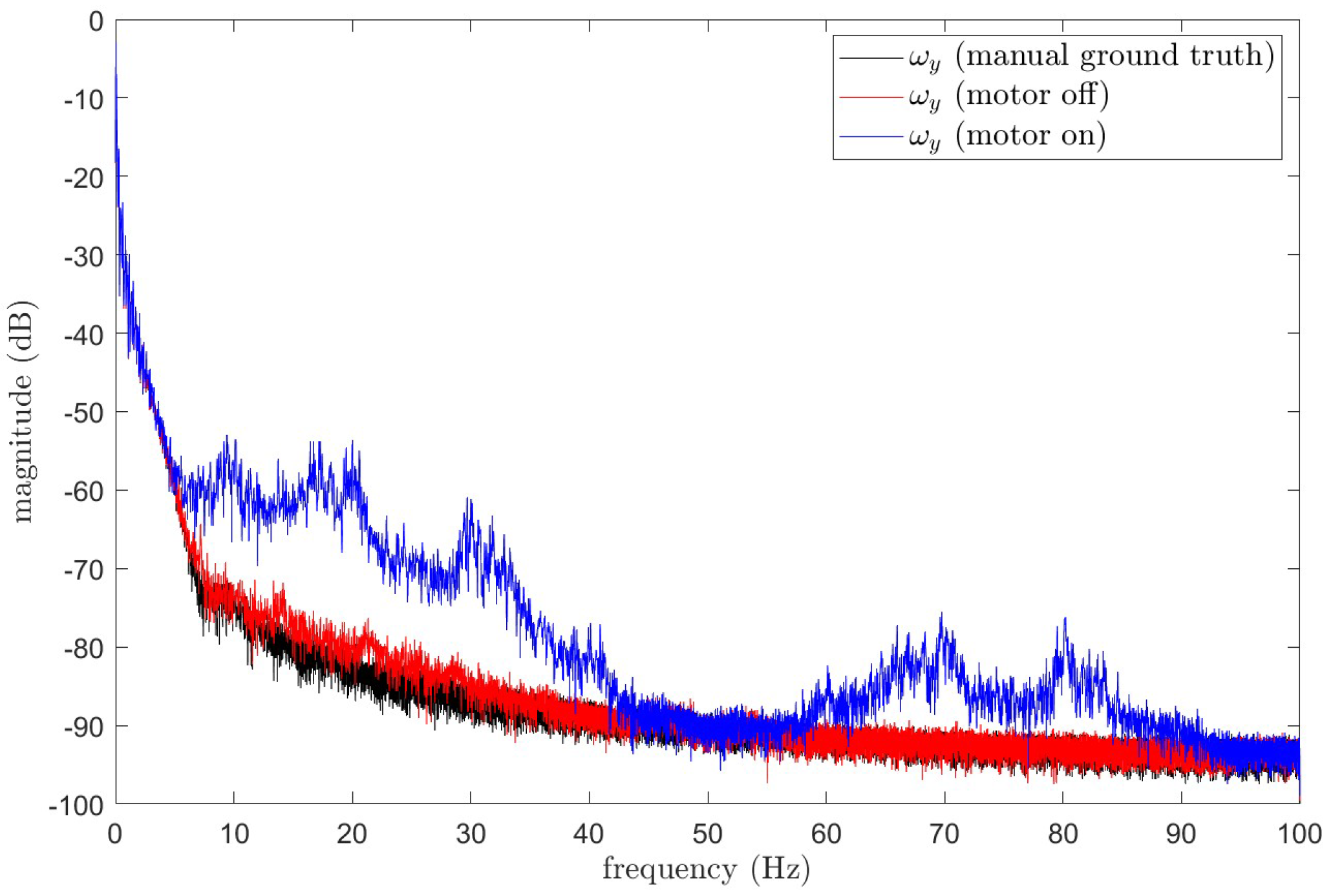
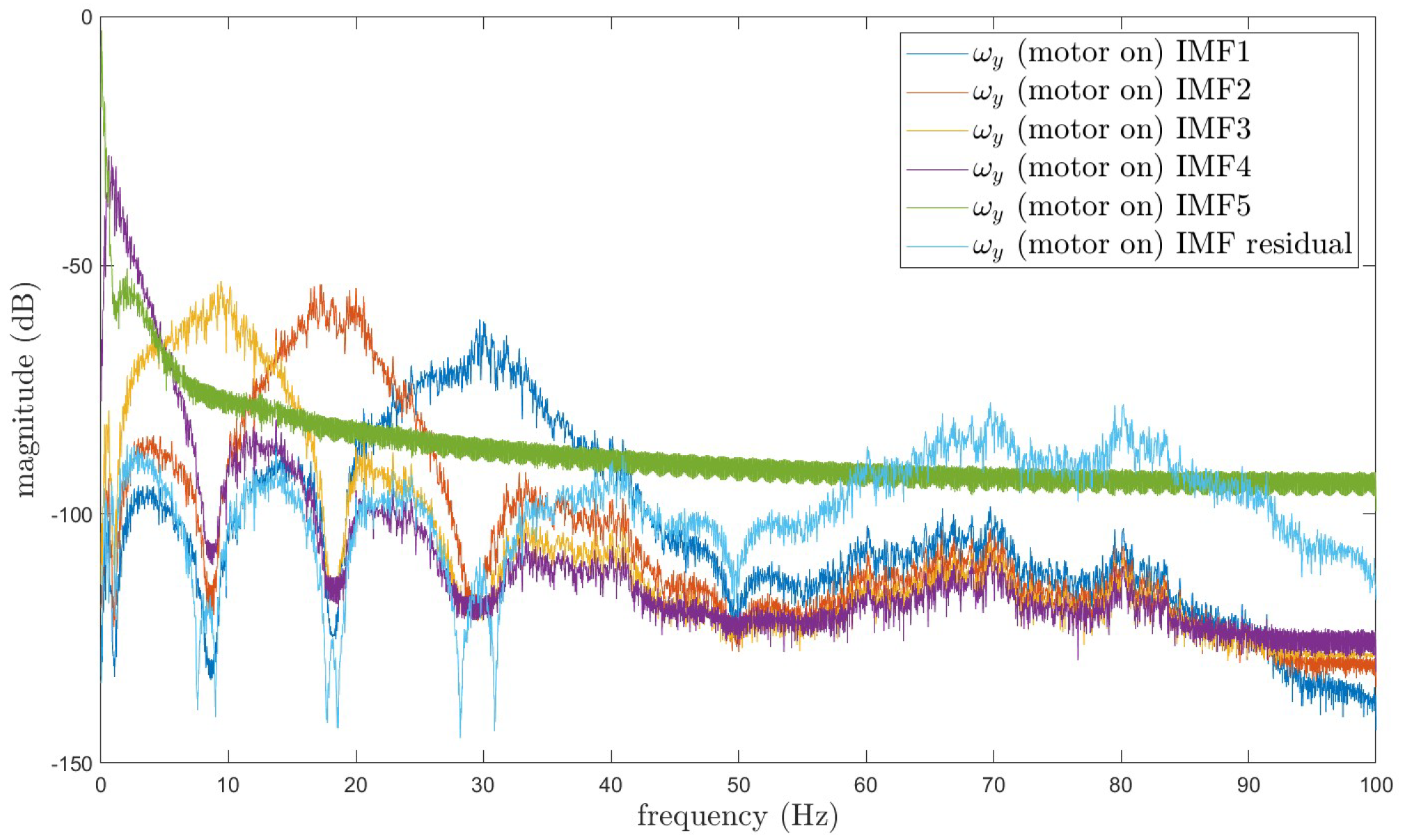
4. IMU Angular Velocity Denoising Experiment in Polishing Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Xiong, H.; Hao, S.; Yang, G.; Wang, M.; Chen, Q. A Novel Multidimensional Hybrid Position Compensation Method for INS/GPS Integrated Navigation Systems During GPS Outages. IEEE Sens. J. 2024, 24, 962–974. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, G.; Wei, Z.; Yang, J.; Xing, D. Denoising Method of MEMS Gyroscope Based on Interval Empirical Mode Decomposition. Math. Probl. Eng. 2020, 1, 3019152. [Google Scholar] [CrossRef]
- Shi, B.; Su, Y.; Zhang, D.; Wang, C.; AbouOmar, M.S. Research on Trajectory Reconstruction Method Using Automatic Identification System Data for Unmanned Surface Vessel. IEEE Access 2019, 7, 170374–170384. [Google Scholar] [CrossRef]
- Zeng, X.; Xian, S.; Liu, K.; Yu, Z.; Wu, Z. A method for compensating random errors in MEMS gyroscopes based on interval empirical mode decomposition and ARMA. Meas. Sci. Technol. 2023, 35, 015020. [Google Scholar] [CrossRef]
- Wang, C.; Cui, Y.; Liu, Y.; Li, K.; Shen, C. High-G MEMS Accelerometer Calibration Denoising Method Based on EMD and Time-Frequency Peak Filtering. Micromachines 2023, 14, 970. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Fang, L.; Xue, Z.; Qi, Z. Research on Random Drift Model Identification and Error Compensation Method of MEMS Sensor Based on EEMD-GRNN. Sensors 2022, 22, 5225. [Google Scholar] [CrossRef] [PubMed]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, Y. An Adaptive Variational Mode Decomposition Technique with Differential Evolution Algorithm and Its Application Analysis. Shock Vib. 2021, 1, 2030128. [Google Scholar] [CrossRef]
- Wang, P.; Li, G.; Gao, Y. A compensation method for gyroscope random drift based on unscented Kalman filter and support vector regression optimized by adaptive beetle antennae search algorithm. Appl. Intell. 2023, 53, 4350–4365. [Google Scholar] [CrossRef]
- Ding, M.; Shi, Z.; Du, B.; Wang, H.; Han, L. A signal de-noising method for a MEMS gyroscope based on improved VMD-WTD. Meas. Sci. Technol. 2021, 32, 095112. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, X.; Yang, J.; Fu, Y.; Bian, J. Research on sensor fusion-based calibration and real-time point cloud mapping methods for laser lidar and IMU. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-1/W2-2023, 1199–1206. [Google Scholar]
- Zhang, T.; Yuan, M.; Wang, L.; Tang, H.; Niu, X. A Robust and Efficient IMU Array/GNSS Data Fusion Algorithm. IEEE Sens. J. 2024, 24, 26278–26289. [Google Scholar] [CrossRef]
- Kim, H.; Choi, Y. Comparison of Three Location Estimation Methods of an Autonomous Driving Robot for Underground Mines. Appl. Sci. 2020, 10, 4831. [Google Scholar] [CrossRef]
- Pinto, V.H.; Amorim, A.; Rocha, L.; Moreira, A.P. Enhanced Performance Real-Time Industrial Robot Programming by Demonstration using Stereoscopic Vision and an IMU sensor. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 108–113. [Google Scholar]
- Dan, D.; Zeng, G.; Pan, R.; Yin, P. Block-wise recursive sliding variational mode decomposition method and its application on online separating of bridge vehicle-induced strain monitoring signals. Mech. Syst. Signal Process. 2023, 198, 110389. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers; Now Foundations and Trends: Hanover, MA, USA, 2011. [Google Scholar]
- Jiao, Y.; Jin, Q.; Lu, X.; Wang, W. Alternating direction method of multipliers for linear inverse problems. SIAM J. Numer. Anal. 2016, 54, 2114–2137. [Google Scholar] [CrossRef]
- Rafii, Z. Sliding Discrete Fourier Transform with Kernel Windowing [Lecture Notes]. IEEE Signal Process. Mag. 2018, 35, 88–92. [Google Scholar] [CrossRef]
- van der Byl, A.; Inggs, M.R. Constraining error—A sliding discrete Fourier transform investigation. Digit. Signal Process. 2016, 51, 54–61. [Google Scholar] [CrossRef]
- Zheng, T.; Xu, A.; Xu, X.; Liu, M. Modeling and Compensation of Inertial Sensor Errors in Measurement Systems. Electronics 2023, 12, 2458. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | IMF1 | IMF2 | IMF3 |
|---|---|---|---|
| RSVMD | 0.867 | 0.0387 | 0.0281 |
| PO-RSVMD | 0.0391 | 0.0362 | 0.0273 |
| Algorithm | Average Iteration Count | Average Iteration Time (s) | Average RMSE |
|---|---|---|---|
| PO-RSVMD | 22 | 0.029 | 0.022 |
| 23 | 0.031 | 0.022 | |
| 20 | 0.028 | 0.018 | |
| 35 | 0.049 | 0.031 | |
| 25 | 0.035 | 0.021 | |
| RSVMD | 1262 | 1.710 | 0.014 |
| 1252 | 1.700 | 0.014 | |
| 1216 | 1.640 | 0.014 | |
| 919 | 1.259 | 0.024 | |
| 1230 | 1.671 | 0.013 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; He, W.; Pan, T.; Qin, S.; Ruan, Z.; Li, X. The Parameter-Optimized Recursive Sliding Variational Mode Decomposition Algorithm and Its Application in Sensor Signal Processing. Sensors 2025, 25, 1944. https://doi.org/10.3390/s25061944
Liu Y, He W, Pan T, Qin S, Ruan Z, Li X. The Parameter-Optimized Recursive Sliding Variational Mode Decomposition Algorithm and Its Application in Sensor Signal Processing. Sensors. 2025; 25(6):1944. https://doi.org/10.3390/s25061944
Chicago/Turabian StyleLiu, Yunyi, Wenjun He, Tao Pan, Shuxian Qin, Zhaokai Ruan, and Xiangcheng Li. 2025. "The Parameter-Optimized Recursive Sliding Variational Mode Decomposition Algorithm and Its Application in Sensor Signal Processing" Sensors 25, no. 6: 1944. https://doi.org/10.3390/s25061944
APA StyleLiu, Y., He, W., Pan, T., Qin, S., Ruan, Z., & Li, X. (2025). The Parameter-Optimized Recursive Sliding Variational Mode Decomposition Algorithm and Its Application in Sensor Signal Processing. Sensors, 25(6), 1944. https://doi.org/10.3390/s25061944