1. Introduction
As global traffic volume continues to rise, traffic safety has become a focal point of societal concern. According to reports from the World Health Organization, traffic accidents result in hundreds of thousands of casualties annually, underscoring the urgency of addressing traffic safety issues. To effectively reduce the incidence of traffic accidents, the development and application of Advanced Driver-Assistance Systems (ADASs) and autonomous driving technologies are particularly crucial. In this context, direction-of-arrival (DOA) estimation, as a key signal processing technique, is increasingly recognized as an important means to enhance traffic safety. Traditional DOA estimation methods are often limited to one-dimensional (1D) scenarios, primarily focusing on the azimuth angle of signal sources, which may not provide enough information in complex traffic environments [
1,
2,
3]. In contrast, two-dimensional (2D) DOA estimation technology can capture both azimuth and elevation angles, offering vehicles a comprehensive environmental awareness capability [
4]. By integrating sensor arrays and relevant signal processing algorithms, 2D DOA estimation can effectively identify various signal sources, including surrounding vehicles, pedestrians, traffic signs, and traffic lights, which is crucial for enhancing the vehicle’s intelligent decision-making abilities. In practical applications, 2D DOA estimation can significantly improve early warning capabilities for traffic accidents [
5,
6]. For instance, by continuously monitoring the surrounding environment, the system can detect potential collision risks and take appropriate actions, such as automatic braking or issuing alerts, thereby effectively reducing the likelihood of accidents. Furthermore, this technology can also be employed for traffic flow analysis and management, enhancing road utilization efficiency and further ensuring traffic safety.
Two-dimensional DOA estimation is a fundamental problem in array signal processing and serves as a key metric for evaluating the performance of automotive sensors [
7,
8]. The 2D DOA estimation technique holds great potential for applications in signal processing and communication, particularly in fields such as radar, sonar, and wireless communication. However, despite the increasing maturity of its theoretical foundation, its estimation performance in practical applications is often influenced by various factors, primarily including the strength of noise, the number of array elements, and environmental conditions. Therefore, establishing a tight and reliable performance bound for 2D DOA estimation is vital for ensuring the effectiveness of traffic safety systems [
9]. Error is a critical metric for evaluating the performance of parameter estimation methods, with the most representative metric being the mean squared error (MSE), expressed as
where
represents the estimated value, and
represents the true value. Due to its advantages of ease of calculation and intuitiveness, the MSE has been widely applied over the past half-century [
10,
11]. However, its drawback lies in the lack of an exact explicit minimum solution. Consequently, researchers have extensively explored the performance bounds of parameter estimation. Most studies have focused on the Cramér–Rao bound (CRB) and Barankin bound (BB), and analytical expressions are successfully derived for various scenarios [
12,
13,
14,
15]. The CRB is widely accepted as a performance lower bound in parameter estimation due to its easily derivable explicit solution. In [
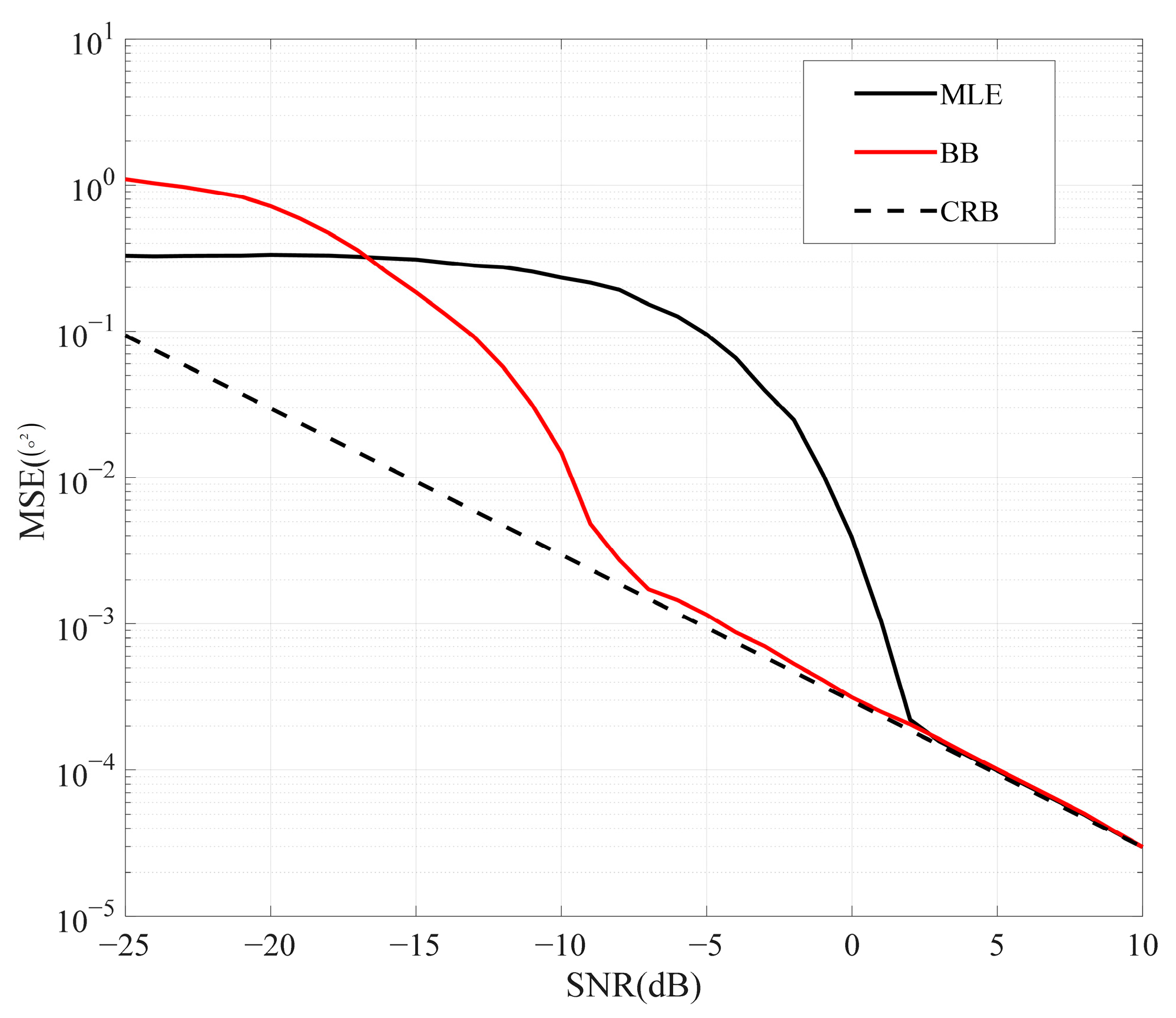
16], the CRB of direction of arrival (DOA) is derived for coprime arrays. Although the CRB provides a dependable and stringent performance bound in the high-signal-to-noise ratio (SNR) region, its performance is catastrophic in the low-SNR region. Compared to the CRB, the BB has tighter performance in the medium-SNR region. However, the BB completely diverges from the CRB in the low-SNR region, exhibiting a phenomenon known as the threshold effect. The estimation performances of the CRB, the BB, and the MSE of the maximum likelihood estimation (MLE) method are plotted in
Figure 1. In the high-SNR region, both the CRB and the BB can accurately predict the performance of the MLE. However, in the low-SNR region, it is evident that the BB surpasses the MLE in terms of the MSE, and the CRB cannot provide accurate performance in parameter estimation. The occurrence of this phenomenon, known as the threshold effect, is due to the lack of
a priori distribution of parameters in the low-SNR region. A similar phenomenon can also be seen in [
17]. Therefore, neither the CRB nor the BB can fully characterize performance across all SNR regions.
The rapid advancement of signal processing techniques has pushed parameter estimation in the low-to-medium-SNR region to the forefront of research. Consequently, while the CRB provides theoretical guidance, analyzing the accuracy of parameter estimation using it often faces challenges. It is recognized that the convergence of the MSE is affected by the
a priori distribution of parameters in the extremely low SNR region. Hence, Bayesian bounds have been introduced in recent years. Bayesian bounds, such as Weiss–Weinstein bound (WWB) and the Ziv–Zakai bound (ZZB), leverage the
a priori distribution of parameters to establish a global performance bound, enhancing the performance of parameter estimation in the low-to-medium-SNR region [
18,
19,
20,
21]. The contributions of the ZZB and the WWB to parameter estimation performance have also been demonstrated in many studies. The explicit WWB is derived for multiple-input multiple-output (MIMO) radar with collocated linear arrays [
22]. In [
23], the explicit ZZB is derived for DOA estimation. By introducing the
a priori distribution of the parameter, the ZZB and the WWB provide a rigorous and reliable performance bound for parameter estimation in all SNR regions. However, the main drawback of the two performance bounds is their high computational complexity. WWB calculation necessitates the establishment of test points and the inversion of a matrix, while computation for the ZZB involves performing multiple complex numerical integrals [
24].
Unlike the ZZB and the WWB, the entropy error bound (EEB) provides a global performance bound by utilizing the
a posteriori entropy of the parameters. The EEB is a globally strict and tight performance bound. It possesses a simple comprehensive expression, which is a function of array parameters such as the SNR, array elements, and the ratio of signal bandwidth to carrier frequency. The expression for the EEB has been derived for various array scenarios. For example, in [
25], the mutual information bound is derived in a single-source 1D DOA estimation scenario, allowing for the computation of the EEB. In [
26], the EEB is proposed to evaluate DOA estimation in a compressive sensing scenario. The results indicate that the EEB can provide tight and rigorous performance lower bounds in the whole SNR range.
In the context of complex application scenarios, it is crucial to establish performance bounds for 2D DOA estimation. Two-dimensional DOA estimation requires precise measurement of both azimuth and elevation angles. During this transition, the analysis of performance bounds becomes more complex yet remains equally important. Our previous research on sensor array DOA estimation primarily focused on deriving a closed-form expression for the 1D EEB. We shift our focus to 2D joint estimation, marking a significant advancement in the parameter estimation field. Two-dimensional DOA estimation incorporates both azimuth and elevation angles, offering a more comprehensive signal analysis capability. This transition enables us to better address complex signal environments. Therefore, the focus of this study is to derive a joint azimuth and elevation DOA EEB (AEEEB) in a single-signal-source scenario. Assuming the azimuth and elevation DOAs follow a uniform distribution within the observation interval, we obtained the a posteriori probability density function (PDF) of azimuth and elevation DOAs via the Bayesian theorem. By calculating the a posteriori distribution uncertainty of azimuth and elevation DOAs, known as a posteriori entropy, we provide the theoretical AEEEB. Furthermore, by introducing the parameter uncertainty factor into the theoretical AEEEB, we derive a global joint AEEEB. The main highlights of this paper are as follows:
First, assuming that the a priori distributions of azimuth and elevation DOAs follow a uniform distribution, we derive the joint a posteriori PDF for the azimuth and elevation DOAs. Subsequently, we demonstrate that the joint a posteriori PDF approximately follows a 2D Gaussian distribution in the high-SNR region.
Then, based on the joint a posteriori PDF, we derive the theoretical AEEEB, which is an effective performance bound in all SNR regions. We also give the joint AEEEB by introducing the parameter uncertainty factor. The simulation results demonstrate that the approximate AEEEB remains consistent with the theoretical AEEEB in all SNR regions.
Next, we also consider the scenario of independently evaluating the estimation performance of azimuth and elevation DOAs, and the expressions for the azimuth EEB (AEEB) and elevation EEB (EEEB) are derived. And we demonstrate that the AEEEB, the AEEB, and the EEEB degenerate to the respective CRBs in their respective scenarios under the high-SNR condition.
Finally, we find that the joint expressions for the AEEB, the EEEB, and the AEEEEB are a function of array system parameters. Specifically, the three performance bounds are highly influenced by the observation interval in the low-SNR region. In the high-SNR region, the three performance bounds depend on the number of array elements and the SNR.
The symbols employed throughout this paper are summarized in
Table 1. In addition, the bold uppercase letters represent matrices, and the bold lowercase letters represent vectors. The remainder of this manuscript is organized as follows: In
Section 2, the system model is briefly presented. In
Section 3, the joint
a posteriori PDF is derived for azimuth and elevation DOAs. In
Section 4, the theoretical AEEEB and the joint AEEEB are derived. In
Section 5, extensive simulation results are presented to demonstrate the performance of the derived AEEEB. Finally, conclusions are drawn in
Section 6.
3. Joint a Posteriori Probability Density Function for Azimuth and Elevation DOAs
Consider substituting (6) into (12); we have
(13) is based on a conditional PDF, which links the received signal, the azimuth, the elevation, and the initial phase. Since the phase
is uniformly distributed within the observation interval, it follows
Upon further simplification, (14) can be reduced to
where
represents the zero-order first-kind Bessel function [
26], which is written as
According to the Bayesian theorem, we describe the relationship between the received data and unknown parameters using a joint probability distribution [
29,
30]. Thus, based on (8), (9), and (15), the joint
a posteriori PDF for azimuth and elevation DOAs is calculated as
where the denominator represents the normalization constant, and the numerator determines the shape of the
a posteriori probability distribution.
Assume that the signal source is located at
. Substituting the known received signal into (17), we have
where
represents the SNR of the antenna array.
is referred to as the steering vector of the antenna array and is expressed as
where
is the cross-correlation function between the received signal and noise, representing the influence of noise.
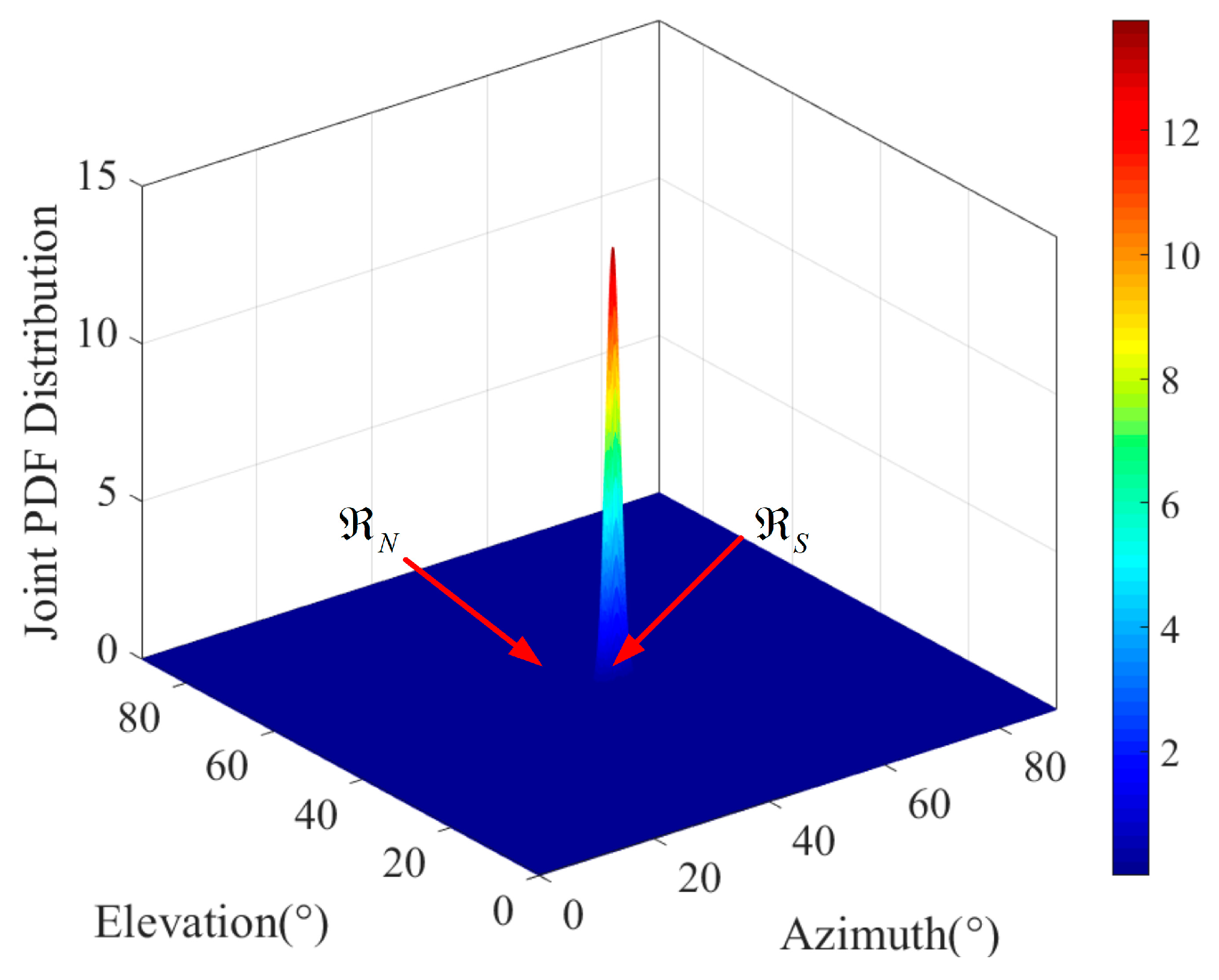
The shape of the
a posteriori distribution under different SNR conditions is shown in
Figure 3 when the signal source is located at (45°, 45°). The color variations in the figure represent changes in the posterior probability density function values, with blue indicating the minimum value and red indicating the maximum value. In the low-SNR region, the system noise has a significant impact on the received signal, while the signal from the source is relatively weak. The
a posteriori distribution of the azimuth and elevation DOA joint estimation is typically more spread out and blurred, exhibiting a wider range of values. In this case, the estimation results may have greater uncertainty, as shown in
Figure 3a. Contrary to the low-SNR situation, the influence of noise is relatively small under high-SNR conditions. Therefore, the
a posteriori distribution of the azimuth and elevation DOA joint estimation is usually narrower and sharper, concentrated in the region closer to the true values. In this case, the estimation results are more reliable and accurate, as shown in
Figure 3b. According to the above analysis, we present Conclusion 1.
Conclusion 1. In the high-SNR region, the joint a posteriori PDF follows a bivariate Gaussian distribution. Let ; then, can be rewritten aswhereis the covariance matrix of azimuth and elevation DOAs, and represents normalization aperture width. Based on the results presented in the covariance matrix in (23), further analysis reveals that in the high-SNR condition, azimuth and elevation DOAs are independent of each other. Thus, marginal distributions of azimuth and elevation DOAs can be obtained, respectively, as
where
.
where
.
In conclusion, the a posteriori PDF of the azimuth and elevation DOAs follows independent 1D Gaussian distributions in the high-SNR region.
4. Joint Entropy Error Bound
The variation in the shape of the
a posteriori distribution, as observed in
Figure 4, represents the accuracy of parameter estimation. When the parameter estimation accuracy is high, the
a posteriori distribution typically exhibits a concentrated, peaked, and compact shape. Conversely, when the parameter estimation accuracy is low, the
a posteriori distribution may display a dispersed, blurred, or multi-modal shape.
A posteriori entropy is a crucial concept in Bayesian statistics, used to quantify the uncertainty of parameter estimation under the known received signal. The
a posteriori entropy can be calculated as
Then, the EEB for azimuth and elevation DOAs is provided in Conclusion 2.
Conclusion 2. The EEB for azimuth and elevation DOAs is defined as the entropy power of azimuth and elevation DOAs, which is calculated as For the sake of convenience, is written as hereafter.
It is apparent that the AEEEB solely depends on the received signal, the system noise, and the SNR. Consequently, the AEEEB remains unaffected by any particular estimator and serves as a universal measure of the performance bound for L-ULA. A smaller EEB indicates a more concentrated a posteriori distribution of the parameter, indicating higher accuracy in parameter estimation.
4.1. The Joint Asymptotic Lower Bound
According to Conclusion 1, we know that
follows a 2D Gaussian distribution in the high-SNR region. Thus, the
a posteriori entropy is written as
Substituting (28) into (27), we obtain the joint asymptotic lower bound for the AEEEB, provided in Conclusion 3.
Conclusion 3. The joint asymptotic lower bound for the AEEEB is calculated as From (29), it is evident that the asymptotic lower bound is inversely proportional to the number of elements, normalized aperture width, and the square of the SNR. This also demonstrates that the AEEEB remains unaffected by any particular estimator. In addition, due to the independence of azimuth and elevation in the high-SNR region, the AEEEB can also be divided into two parts, written as
where
is the AEEB and
is the EEEB.
The joint asymptotic lower bound for AEEB satisfies
and the joint asymptotic lower bound for EEEB satisfies
4.2. The Approximate Global Performance Bound
The joint global performance bounds play a crucial role in parameter estimation, as they provide insights into the accuracy assessment of parameter estimation results and guide parameter tuning. In this part, we derive the approximate performance bound of the AEEEB.
It can be seen in
Figure 3 that the
a posteriori distribution of the azimuth and elevation DOAs has a peak at
, and other regions are relatively flat. Therefore, we divide the whole observation region into two subregions. The first region is the signal region
(the signal takes the dominant position), which satisfies
, the other region is the noise region
, which satisfies
, as shown in
Figure 4.
is rewritten as
where
Substituting (37) into (33), we obtain the
a posteriori entropy, written as
The first term in (37) is further written as
where
represents the
a posteriori entropy in the signal region, and
represents the proportion of the
a posteriori entropy of the signal region. In addition, it is noted that the decomposition of terms is neglected, i.e.,
and
.
The second term in (38) is further written as
where
represents the
a posteriori entropy in the signal region, and
represents the proportion of the
a posteriori entropy of the noise region. In addition, it is noted that the decomposition of terms is neglected, i.e.,
and
.
Eventually, we can obtain the a posteriori entropy in the whole region, which is approximately written as
where
denotes the probability of
occurring at
, and it is expressed as
In
Appendix B, the
in the low-SNR region is derived, which is written as
In
Appendix C, the
in the low-SNR region is derived, which is shown as
In
Appendix D, the
in the high-SNR region is derived, which is written as
And is calculated in (28).
Based on (43) and (45),
is calculated as
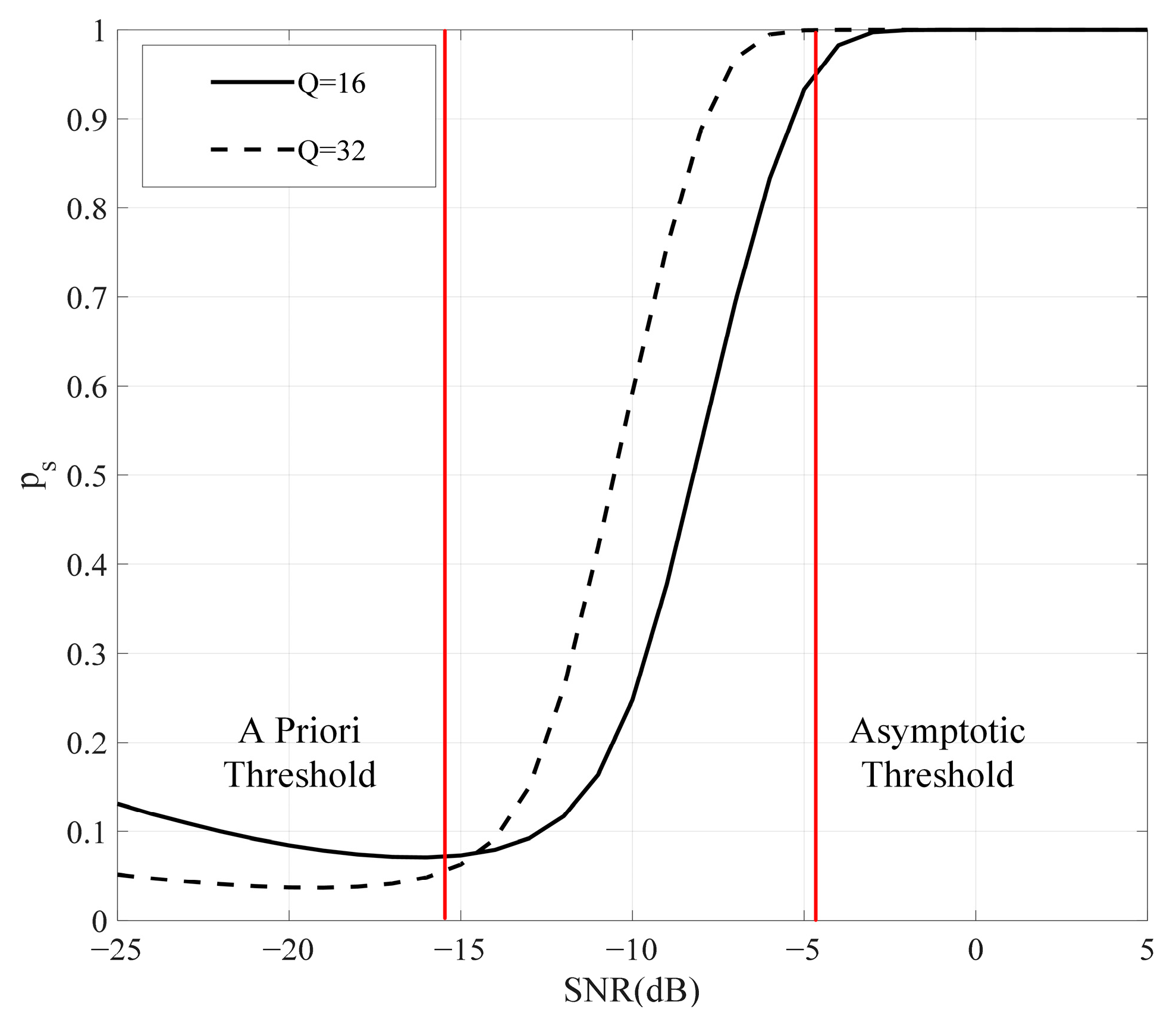
According to (46), the relationship between
and the SNR is illustrated in
Figure 5. The black lines represent the values of
under different element conditions, while the red lines indicate the threshold.
divides the SNR range into three regions. The first region is the prior region, where
and the threshold is referred to as the
a priori threshold. The second region is the asymptotic region, where
and the threshold is known as the asymptotic threshold. The region between these two thresholds is the medium SNR. However, it can be clearly observed that
increases significantly in the low-SNR region, which can be attributed to the approximate bias of
in the low-SNR region. However, as the number of elements increases, the error of
decreases in the
a priori region.
Substituting (28) and (44) into (41), we obtain the joint expression for a posteriori entropy, given as
Finally, substituting (47) and (26), we calculate the joint performance expression for AEEEB in Conclusion 4.
Conclusion 4. The approximate performance expression for the AEEEB is expressed as Upon careful observation of (46) and (48), it can be noticed that the AEEEB is only dependent on the size of the observation interval, the number of elements, and the SNR.
4.3. The Approximate AEEEB for Special Scenarios
The approximate expression in (48) can be used to analyze the performance of the L-shaped array system in special scenarios. In the
a priori region (the low-SNR region),
, and the AEEEB can be rewritten as
Upon careful observation of (49), we find that the number of elements does not provide a significant gain to the L-shaped array system when the SNR is very low. The main factor that affects performance is the observation interval. Therefore, when the observation interval is fixed, the performance curve of the proposed bound remains almost unchanged in the a priori region.
In the asymptotic region (the high-SNR region),
, and the AEEEB can be rewritten as
Upon careful observation of (50), we find that the observation interval does not affect the performance of the L-shaped array system, which is the same result as that deduced in [
17] (see (26)–(28)). The main factors that affect performance are the number of elements and the SNR. The AEEEB is inversely proportional to the fourth power of the SNR and the square of the number of array elements.
4.4. Comparison with Cramér–Rao Bound
The CRB establishes a lower bound on the variance of any unbiased estimator [
31]. Here, we provide the CRB for azimuth and elevation DOA joint estimation as a benchmark to which to compare the proposed AEEEB.
The Fisher information matrix (FIM) for azimuth and elevation DOAs is expressed as
Using (51), we construct the FIM; we have
The inverse of the FIM is the CRB matrix, which is written as
where
refers to the terms that do not contribute to the CRB.
The
is calculated as
The
is calculated as
The CRB for azimuth and elevation DOA joint estimation is written as
Based on (50) and (56), we find that the performance lower bound of the AEEEB is consistent with the CRB.
4.5. Comparison with Mean Squared Error
For the unbiased estimator, the second term in (57) is zero. Thus,
[
32].
We further analyze the relationship between the MSE and the EEB. In the low-SNR region, assuming that the a priori distribution of the parameters follows a uniform distribution, the differential entropy , where . Substituting into the calculation formula of the EEB, we calculate the EEB as , and the variance is calculated as . For azimuth and elevation DOA joint estimation, the AEEEB is calculated as , and the variance is calculated as . Therefore, the MSE is slightly larger than the AEEEB under the low-SNR condition.
In the high-SNR region, the parameters follow a Gaussian distribution under the assumption of a Gaussian channel. The differential entropy , where denotes the variance. Substituting into the calculation formula of the EEB, we calculate the EEB as ; i.e., the EEB equals the variance. For azimuth and elevation DOA joint estimation, the AEEEB is calculated as . The AEEEB is consistent with the product of the and the . Therefore, the AEEEB, the MSE, and the CRB are consistent with each other. When is not a diagonal matrix, the AEEEB may be smaller than the product of the CRB. This occurs as a result of the association between azimuth and elevation DOAs, leading to diminished uncertainty.
5. Simulation Testing
In
Section 5, a comprehensive set of numerical simulations was performed to rigorously evaluate our theoretical derivations for azimuth and elevation DOA joint estimation. We chose the MATLAB R2016a platform for our versatile simulation testing needs. The simulation parameters are detailed in
Table 2.
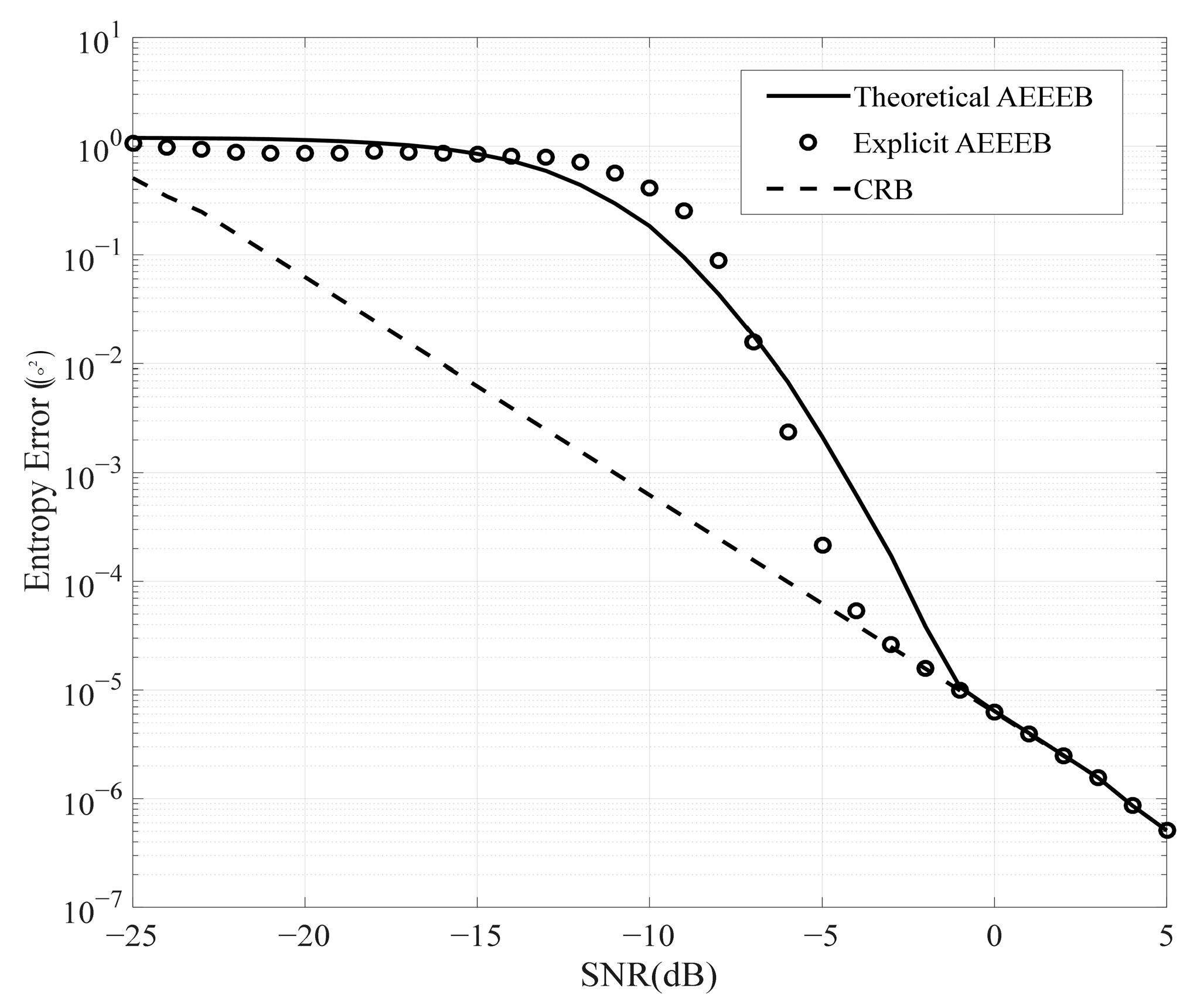
The first study compares the performance curves of the theoretical AEEEB with the approximate AEEEB. The theoretical AEEEB is calculated by (18), (26), and (27), the approximate AEEEB is calculated by (48), and the CRB is obtained by (56). The simulation results are plotted in
Figure 6. In the low-SNR region, the approximate AEEEB curve is slightly below the theoretical AEEEB curve, which is attributed to the increase in
(see
Figure 5). In the medium-SNR region, the difference falls within an acceptable range. In the high-SNR region, the approximate AEEEB curve and the theoretical AEEEB gradually approach the CRB curves. Therefore, the approximate AEEEB can replace the theoretical AEEEB in the whole SNR region.
We then plot various performance bounds for comparison with the AEEEB, as shown in
Figure 7. The MLE is executed by conducting a 2D search to identify the PDF’s peak value in (14), as shown using a black line marked with circles. The calculation formula of the MSE for 2D DOA can be expressed as
. The AEEEB is calculated by (27), and the CRB is calculated by (56), displayed using a red line and a black dashed line, respectively. In the asymptotic region, the AEEEB gradually approaches the CRB, as the AEEEB utilizes the entropy of Gaussian distribution while the CRB utilizes the FIM (see (50) and (56)). Outside the asymptotic region, the AEEEB exhibits a tighter performance bound compared to the CRB. In addition, we also provide the AEEEB on the predictive capability of the empirical performance of the MLE estimators. The EEB of the MLE is calculated based on the empirical a posteriori PDF, which is obtained through a statistical search of parameter estimation results. It can be seen that the AEEEB accurately predicts the empirical performance of MLE estimators in the asymptotic region. Outside the asymptotic region, the AEEEB is tighter than the CRB. This is consistent with the results of 1D DOA estimation [
26]. In addition, to validate the generality of the proposed AEEEEB, we have added a set of angular scenarios. It is observed that the performance of the proposed AEEEEB is consistent in different angular scenarios. Outside the asymptotic region, the AEEEEB exhibits tighter performance compared to the CRB, while within the asymptotic region, the AEEEEB degrades to the CRB.
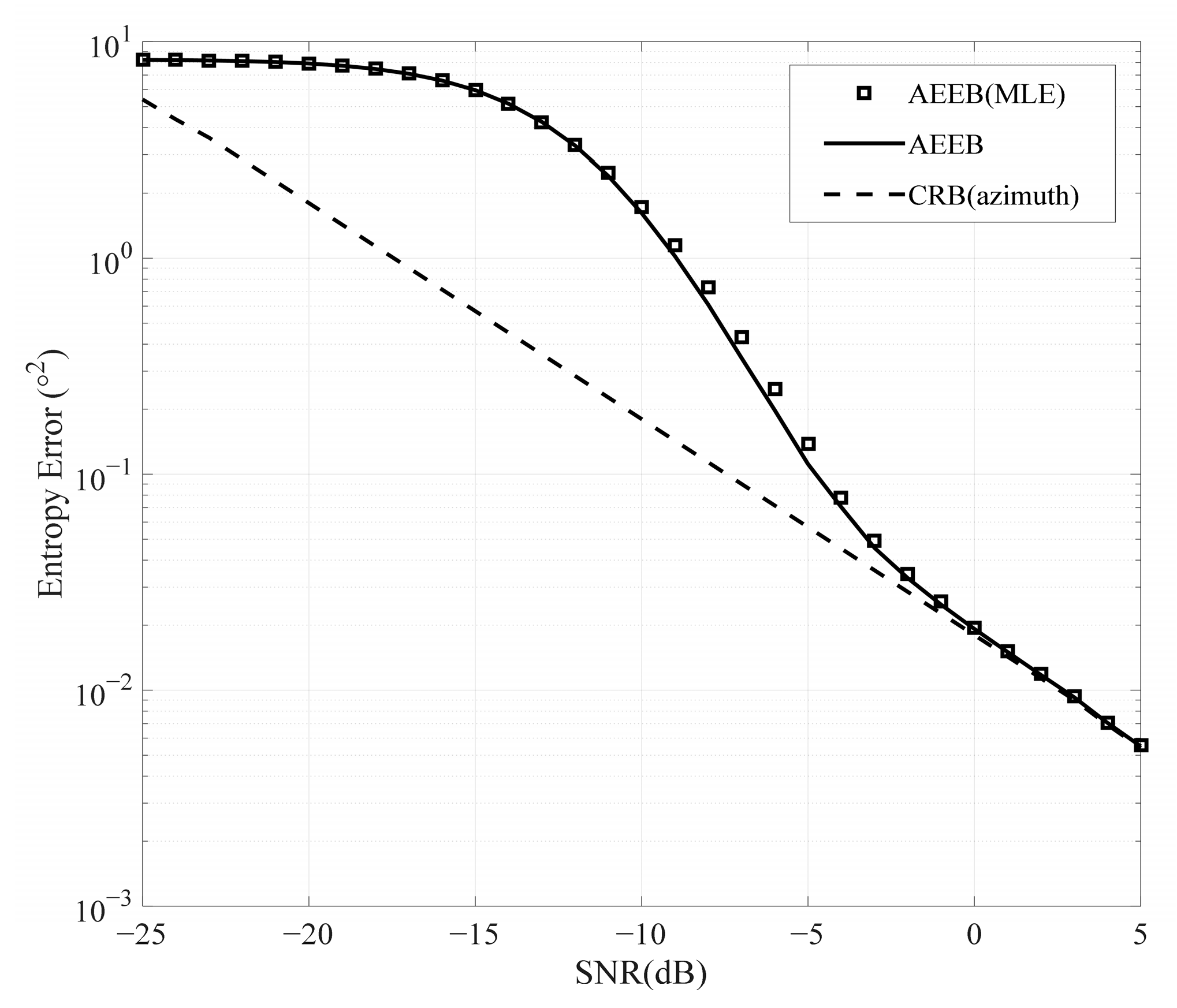
In addition, there is a special scenario where we only need to estimate the azimuth or elevation. Therefore, we further validate the AEEEB for azimuth estimation, as shown in
Figure 8. The MLE is executed by conducting a 1D search to identify the PDF’s peak value in (24), the AEEB is calculated by (31), and the CRB is calculated by (54). It can be observed that the AEEB and the CRB converge asymptotically in the high-SNR region, validating the derivation presented in
Section 4.4. Outside the high-SNR region, the AEEB provides a better prediction of the performance of the MLE compared to the CRB.
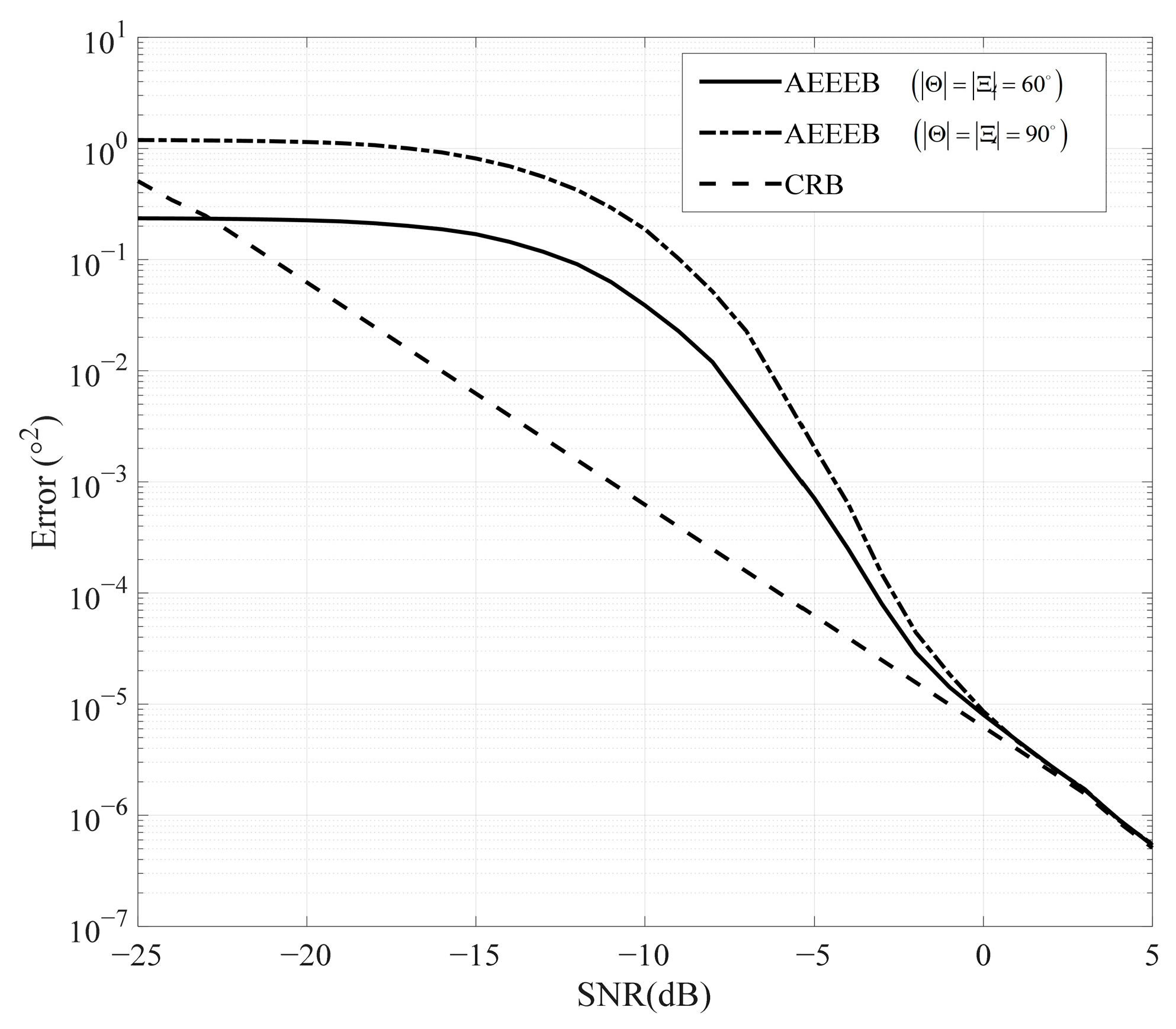
The final study examines the relationship between the observation interval and the AEEEB, as shown in
Figure 9. In the low-SNR region, the AEEEB is directly proportional to the square of the observation interval. Then, the differences between the AEEEBs diminish as the SNR increases. In the high-SNR region, the AEEEB gradually aligns with the CRB. In addition, we can clearly see that the smaller observation intervals lead to a faster convergence of the AEEEB. Thus, we can conclude that the observation interval only affects the performance of the AEEEB in the low-SNR region, which aligns with the derivation in
Section 4.3.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}