

Experimental Demonstration of Sensing Using Hybrid Reconfigurable Intelligent Surfaces †


Abstract
1. Introduction
2. HRIS Element Design
2.1. Conventional Meta-Atom Design
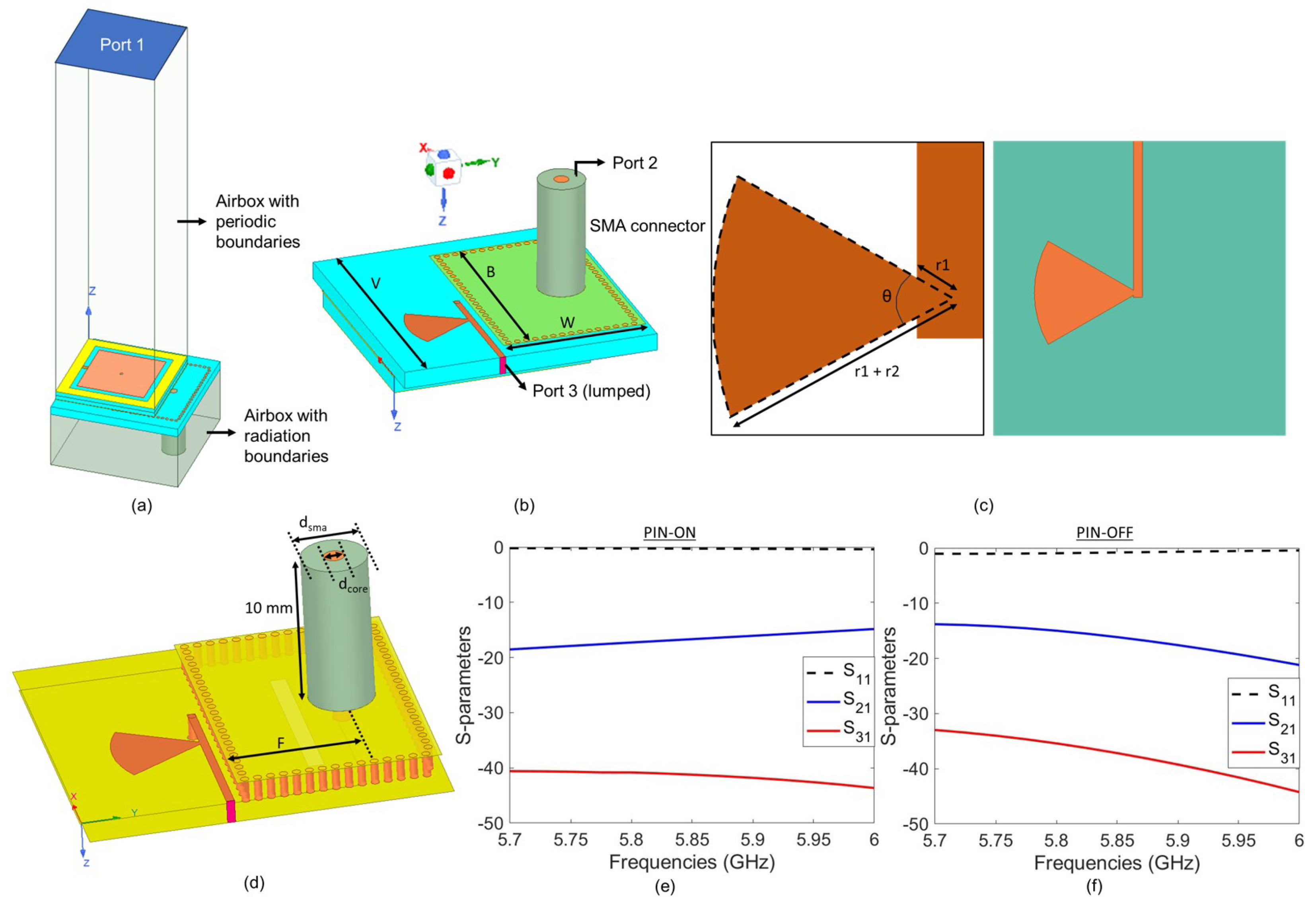
2.2. Hybrid Meta-Atom Design
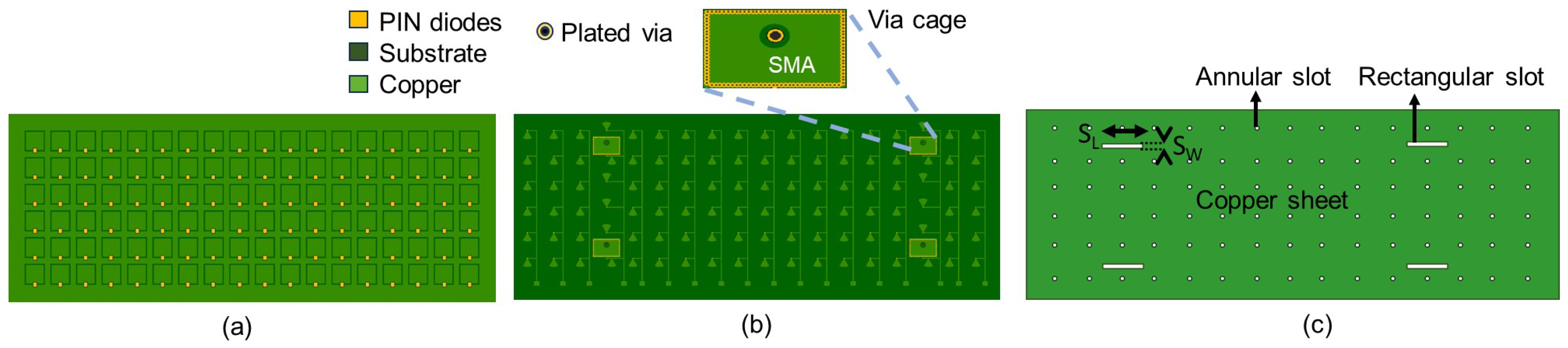
3. PCB Design
4. Control Circuitry
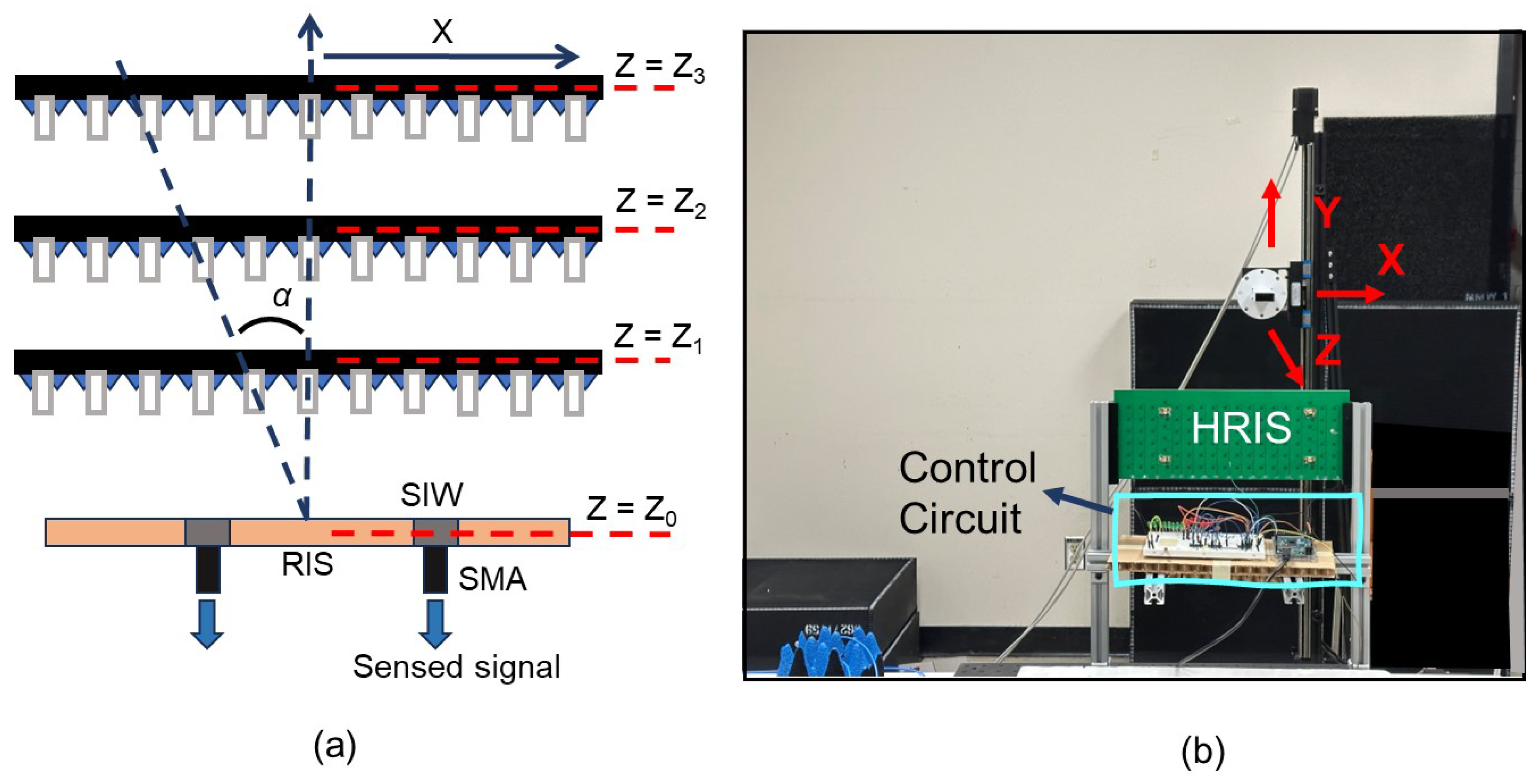
5. Measurement Setup
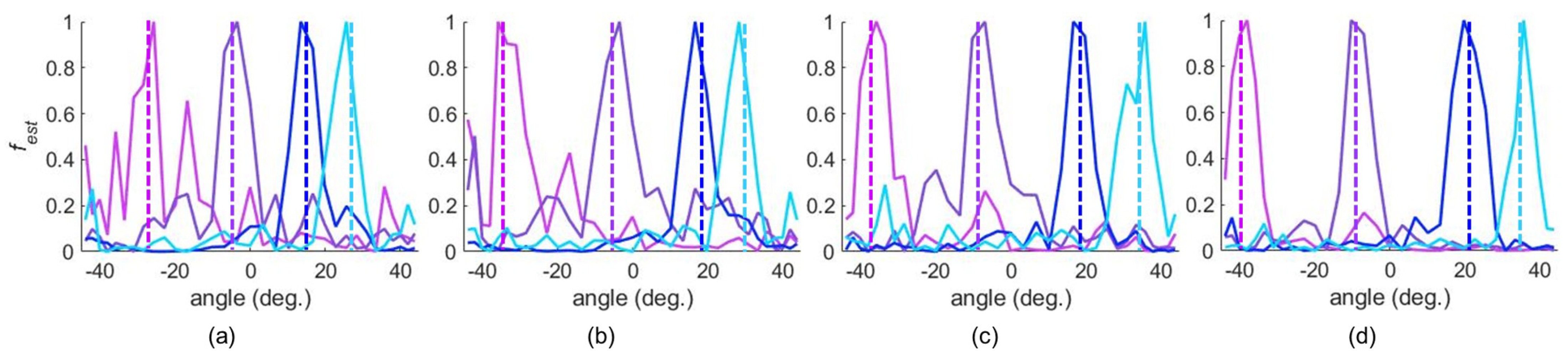
5.1. AOA Detection
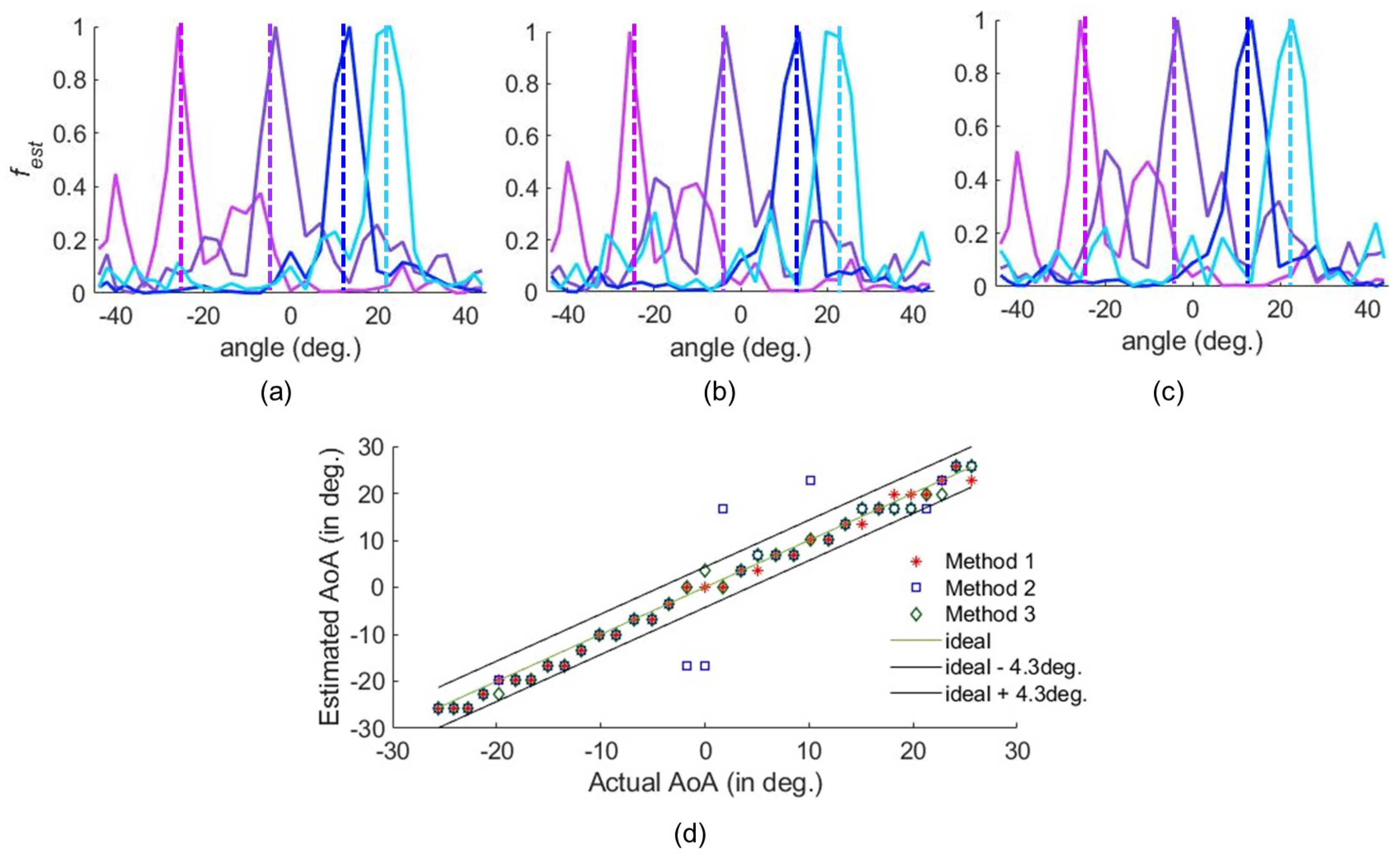
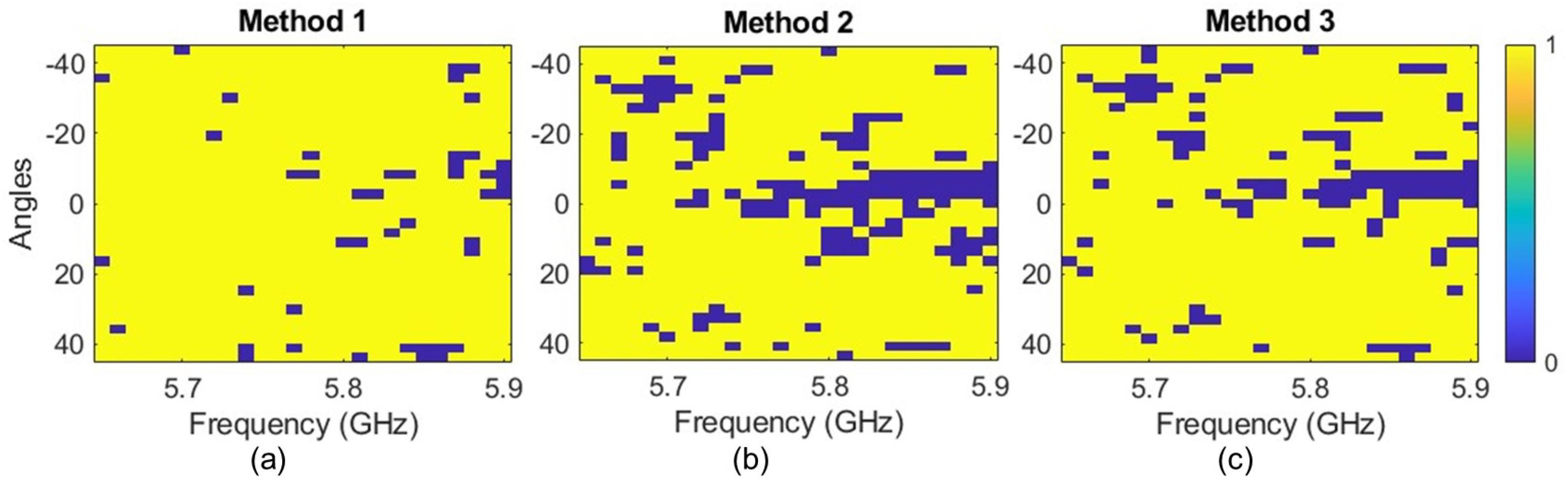
5.2. Data Processing
- 1.
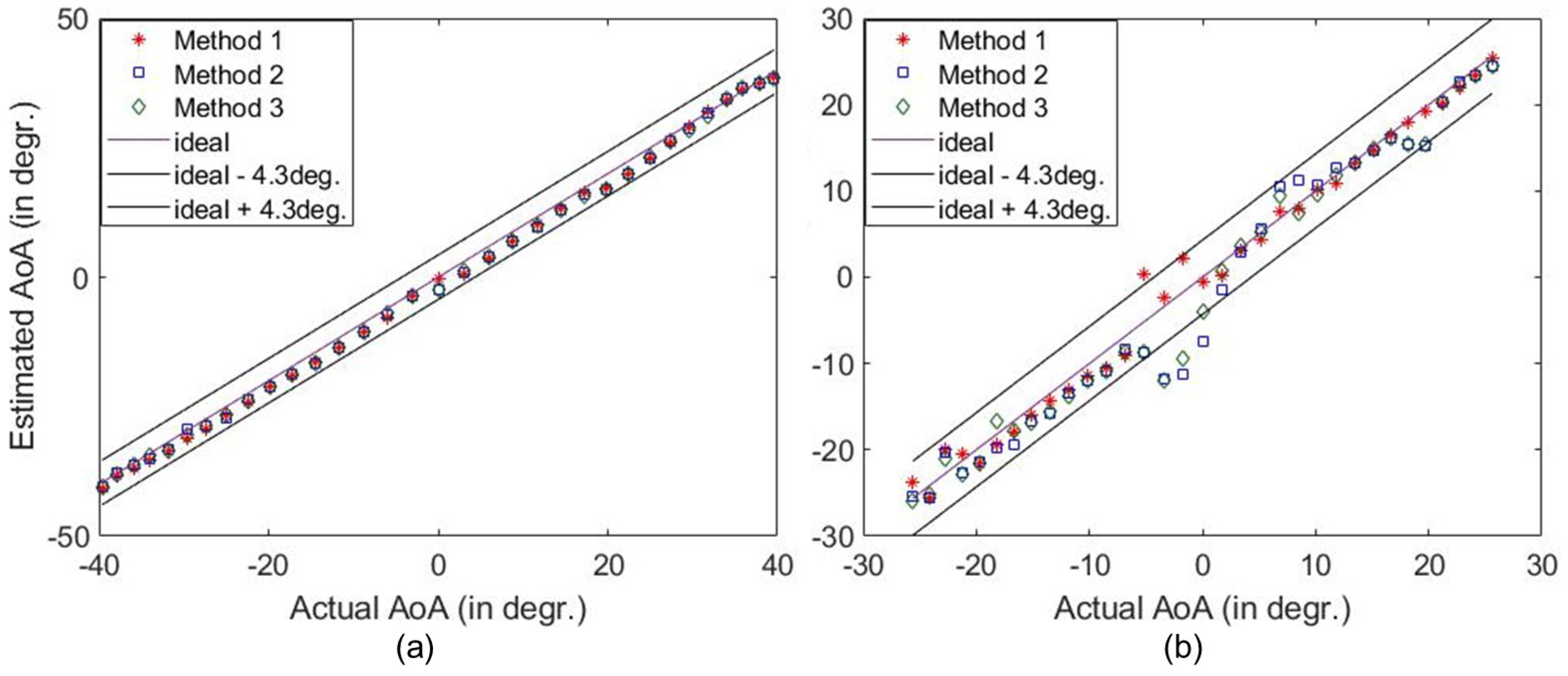
- Method 1: We find the difference between the top and bottom ports, resulting in .
- 2.
- Method 2: We find the difference between the data from adjacent ports, resulting in .
- 3.
- Method 3: We find the difference between the measured data from a reference port and data from all other ones, resulting in . We have selected port 1 as the reference.
5.3. AoA Detection Results
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RIS | Reconfigurable intelligent surfaces |
| HRIS | Hybrid reconfigurable intelligent surfaces |
| AoA | Angle of arrival |
| cELC | Complementary electric LC (loop-capacitor) |
| SIW | Substrate integrated waveguide |
| VNA | Vector network analyzer |
| PCB | Printed circuit board |
| CGS | Conjugate gradient squared |
References
- Renzo, M.D.; Debbah, M.; Phan-Huy, D.T.; Zappone, A.; Alouini, M.S.; Yuen, C.; Sciancalepore, V.; Alexandropoulos, G.C.; Hoydis, J.; Gacanin, H.; et al. Smart radio environments empowered by reconfigurable AI meta-surfaces: An idea whose time has come. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–20. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Ahmed, M.; Raza, S.; Soofi, A.A.; Khan, F.; Khan, W.U.; Abideen, S.Z.U.; Xu, F.; Han, Z. Active reconfigurable intelligent surfaces: Expanding the frontiers of wireless communication-a survey. IEEE Commun. Surv. Tutor. 2024. early access. [Google Scholar] [CrossRef]
- Mu, X.; Xu, J.; Liu, Y.; Hanzo, L. Reconfigurable intelligent surface-aided near-field communications for 6G: Opportunities and challenges. IEEE Veh. Technol. Mag. 2024, 19, 65–74. [Google Scholar] [CrossRef]
- Saggese, F.; Croisfelt, V.; Kotaba, R.; Stylianopoulos, K.; Alexandropoulos, G.C.; Popovski, P. On the impact of control signaling in RIS-empowered wireless communications. IEEE Open J. Commun. Soc. 2024, 5, 4383–4399. [Google Scholar] [CrossRef]
- Hassouna, S.; Jamshed, M.A.; Rains, J.; Kazim, J.u.R.; Rehman, M.U.; Abualhayja, M.; Mohjazi, L.; Cui, T.J.; Imran, M.A.; Abbasi, Q.H. A survey on reconfigurable intelligent surfaces: Wireless communication perspective. IET Commun. 2023, 17, 497–537. [Google Scholar] [CrossRef]
- ElMossallamy, M.A.; Zhang, H.; Song, L.; Seddik, K.G.; Han, Z.; Li, G.Y. Reconfigurable intelligent surfaces for wireless communications: Principles, challenges, and opportunities. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 990–1002. [Google Scholar] [CrossRef]
- Naaz, F.; Nauman, A.; Khurshaid, T.; Kim, S.W. Empowering the vehicular network with RIS technology: A state-of-the-art review. Sensors 2024, 24, 337. [Google Scholar] [CrossRef]
- Yildirim, I.; Mahmood, M.; Basar, E.; Le-Ngoc, T. Spider RIS: Mobilizing Intelligent Surfaces for Enhanced Wireless Communications. arXiv 2024, arXiv:2405.02681. [Google Scholar]
- Zhao, Y.; Feng, Y.; Ismail, A.M.; Wang, Z.; Guan, Y.L.; Guo, Y.; Yuen, C. 2-Bit RIS Prototyping Enhancing Rapid-Response Space-Time Wavefront Manipulation for Wireless Communication: Experimental Studies. IEEE Open J. Commun. Soc. 2024, 5, 4885–4901. [Google Scholar] [CrossRef]
- Faisal, A.; Al-Nahhal, I.; Dobre, O.A.; Ngatched, T.M. RIS-assisted wireless systems. In Reinforcement Learning for Reconfigurable Intelligent Surfaces: Assisted Wireless Communication Systems; Springer: Berlin/Heidelberg, Germany, 2024; pp. 13–23. [Google Scholar]
- Ren, Y.; Zhou, R.; Teng, X.; Meng, S.; Zhou, M.; Tang, W.; Li, X.; Li, C.; Jin, S. On deployment position of RIS in wireless communication systems: Analysis and experimental results. IEEE Wirel. Commun. Lett. 2023, 12, 1756–1760. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, J.; Dong, X.; Wang, Z.; Liu, J.; Yang, W.; Mi, T.; Huang, W.; Qiu, R.C. Multi-RIS-aided Wireless Communications in Real-world: Prototyping and Field Trials. arXiv 2023, arXiv:2303.03287. [Google Scholar]
- Shlezinger, N.; Alexandropoulos, G.C.; Imani, M.F.; Eldar, Y.C.; Smith, D.R. Dynamic metasurface antennas for 6G extreme massive MIMO communications. IEEE Wirel. Commun. 2021, 28, 106–113. [Google Scholar] [CrossRef]
- Wang, F.; Swindlehurst, A.L. Applications of absorptive reconfigurable intelligent surfaces in interference mitigation and physical layer security. IEEE Trans. Wirel. Commun. 2023, 23, 3918–3931. [Google Scholar] [CrossRef]
- Khoshafa, M.H.; Maraqa, O.; Moualeu, J.M.; Aboagye, S.; Ngatched, T.M.; Ahmed, M.H.; Gadallah, Y.; Di Renzo, M. RIS-Assisted Physical Layer Security in Emerging RF and Optical Wireless Communication Systems: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2024. early access. [Google Scholar] [CrossRef]
- Singh, K.; Saikia, M.; Thiyagarajan, K.; Thalakotuna, D.; Esselle, K.; Kodagoda, S. Multi-functional reconfigurable intelligent surfaces for enhanced sensing and communication. Sensors 2023, 23, 8561. [Google Scholar] [CrossRef]
- Zhao, H.; Shuang, Y.; Wei, M.; Cui, T.J.; Hougne, P.d.; Li, L. Metasurface-assisted massive backscatter wireless communication with commodity Wi-Fi signals. Nat. Commun. 2020, 11, 3926. [Google Scholar] [CrossRef]
- Liang, Y.C.; Zhang, Q.; Wang, J.; Long, R.; Zhou, H.; Yang, G. Backscatter communication assisted by reconfigurable intelligent surfaces. Proc. IEEE 2022, 110, 1339–1357. [Google Scholar] [CrossRef]
- Huang, C.; Hu, S.; Alexandropoulos, G.C.; Zappone, A.; Yuen, C.; Zhang, R.; Di Renzo, M.; Debbah, M. Holographic MIMO surfaces for 6G wireless networks: Opportunities, challenges, and trends. IEEE Wirel. Commun. 2020, 27, 118–125. [Google Scholar] [CrossRef]
- Dardari, D.; Decarli, N. Holographic communication using intelligent surfaces. IEEE Commun. Mag. 2021, 59, 35–41. [Google Scholar] [CrossRef]
- ElMossallamy, M.A.; Seddik, K.G.; Chen, W.; Wang, L.; Li, G.Y.; Han, Z. RIS optimization on the complex circle manifold for interference mitigation in interference channels. IEEE Trans. Veh. Technol. 2021, 70, 6184–6189. [Google Scholar] [CrossRef]
- Pradhan, A.; Alamzadeh, I.; Imani, M.F.; Dhillon, H.S. RIS-Aided coexistence in wireless networks using angular information. Sci. Rep. 2024, 14, 30659. [Google Scholar] [CrossRef] [PubMed]
- Mutlu, U.; Bilim, M.; Kabalci, Y. Joint Channel Estimation and Localization in RIS Assisted OFDM-MIMO System. In Proceedings of the 2024 6th Global Power, Energy and Communication Conference (GPECOM), Budapest, Hungary, 4–7 June 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 687–692. [Google Scholar]
- Wei, L.; Huang, C.; Guo, Q.; Yang, Z.; Zhang, Z.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Joint channel estimation and signal recovery for RIS-empowered multiuser communications. IEEE Trans. Commun. 2022, 70, 4640–4655. [Google Scholar] [CrossRef]
- Ma, Q.; Hong, Q.R.; Gao, X.X.; Jing, H.B.; Liu, C.; Bai, G.D.; Cheng, Q.; Cui, T.J. Smart sensing metasurface with self-defined functions in dual polarizations. Nanophotonics 2020, 9, 3271–3278. [Google Scholar] [CrossRef]
- Liaskos, C.; Pyrialakos, G.; Pitilakis, A.; Abadal, S.; Tsioliaridou, A.; Tasolamprou, A.; Tsilipakos, O.; Kantartzis, N.; Ioannidis, S.; Alarcon, E.; et al. ABSense: Sensing electromagnetic waves on metasurfaces via ambient compilation of full absorption. In Proceedings of the Sixth Annual ACM International Conference on Nanoscale Computing and Communication, Dublin, Ireland, 25–27 September 2019; pp. 1–6. [Google Scholar]
- Dai, J.Y.; Tang, W.; Wang, M.; Chen, M.Z.; Cheng, Q.; Jin, S.; Cui, T.J.; Chan, C.H. Simultaneous in situ direction finding and field manipulation based on space-time-coding digital metasurface. IEEE Trans. Antennas Propag. 2022, 70, 4774–4783. [Google Scholar] [CrossRef]
- Fang, X.; Li, M.; Han, J.; Ramaccia, D.; Toscano, A.; Bilotti, F.; Ding, D. Accurate direction–of–arrival estimation method based on space–time modulated metasurface. IEEE Trans. Antennas Propag. 2022, 70, 10951–10964. [Google Scholar] [CrossRef]
- Wang, J.; Lan, Z.; Pyo, C.w.; Baykas, T.; Sum, C.s.; Rahman, M.A.; Gao, J.; Funada, R.; Kojima, F.; Harada, H.; et al. Beam codebook based beamforming protocol for multi-Gbps millimeter-wave WPAN systems. IEEE J. Sel. Areas Commun. 2009, 27, 1390–1399. [Google Scholar] [CrossRef]
- He, J.; Wymeersch, H.; Sanguanpuak, T.; Silvén, O.; Juntti, M. Adaptive beamforming design for mmWave RIS-aided joint localization and communication. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Seoul, Republic of Korea, 6–9 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Huang, H.; Wang, X.; Zhang, C.; Qiu, K.; Han, Z. Reward-maximization-based passive beamforming for multi-RIS-aided multi-user MISO systems. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Alamzadeh, I.; Alexandropoulos, G.C.; Shlezinger, N.; Imani, M.F. A reconfigurable intelligent surface with integrated sensing capability. Sci. Rep. 2021, 11, 20737. [Google Scholar] [CrossRef]
- Alexandropoulos, G.C.; Shlezinger, N.; Alamzadeh, I.; Imani, M.F.; Zhang, H.; Eldar, Y.C. Hybrid reconfigurable intelligent metasurfaces: Enabling simultaneous tunable reflections and sensing for 6G wireless communications. IEEE Veh. Technol. Mag. 2023, 19, 75–84. [Google Scholar] [CrossRef]
- Ghazalian, R.; Chen, H.; Alexandropoulos, G.C.; Seco-Granados, G.; Wymeersch, H.; Jäntti, R. Joint user localization and location calibration of a hybrid reconfigurable intelligent surface. IEEE Trans. Veh. Technol. 2023, 73, 1435–1440. [Google Scholar] [CrossRef]
- Alamzadeh, I.; Imani, M.F. Sensing and reconfigurable reflection of electromagnetic waves from a metasurface with sparse sensing elements. IEEE Access 2022, 10, 105954–105965. [Google Scholar] [CrossRef]
- Alamzadeh, I.; Imani, M. An Experimental Proof of Concept for Sensing Using Hybrid Reconfigurable Intelligent Surfaces. In Proceedings of the 2025 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM), Boulder, CO, USA, 7–10 January 2025; IEEE: Piscataway, NJ, USA, 2025; pp. 377–378. [Google Scholar]
- Sievenpiper, D.; Zhang, L.; Broas, R.F.; Alexopolous, N.G.; Yablonovitch, E. High-impedance electromagnetic surfaces with a forbidden frequency band. IEEE Trans. Microw. Theory Tech. 1999, 47, 2059–2074. [Google Scholar] [CrossRef]
- Alamzadeh, I.; Imani, M.F. Detecting angle of arrival on a hybrid ris using intensity-only data. IEEE Antennas Wirel. Propag. Lett. 2023, 22, 2325–2329. [Google Scholar] [CrossRef]
- Alamzadeh, I.; Alexandropoulos, G.C.; Imani, M.F. Intensity-only OMP-based Direction Estimation for Hybrid Reconfigurable Intelligent Surfaces. In Proceedings of the 2023 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (USNC-URSI), Portland, OR, USA, 23–28 July 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–2. [Google Scholar]
- Sleasman, T.; Imani, M.F.; Xu, W.; Hunt, J.; Driscoll, T.; Reynolds, M.S.; Smith, D.R. Waveguide-fed tunable metamaterial element for dynamic apertures. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 606–609. [Google Scholar] [CrossRef]
- Gros, J.B.; Popov, V.; Odit, M.A.; Lenets, V.; Lerosey, G. A reconfigurable intelligent surface at mmWave based on a binary phase tunable metasurface. IEEE Open J. Commun. Soc. 2021, 2, 1055–1064. [Google Scholar] [CrossRef]
- Popov, V.; Odit, M.; Gros, J.B.; Lenets, V.; Kumagai, A.; Fink, M.; Enomoto, K.; Lerosey, G. Experimental demonstration of a mmWave passive access point extender based on a binary reconfigurable intelligent surface. Front. Commun. Netw. 2021, 2, 733891. [Google Scholar] [CrossRef]
- Shi, H.; Liu, R.; Zhang, Z.; Chen, X.; Wang, L.; Yi, J.; Liu, H.; Zhang, A. An Ultra-Wideband 1-Bit Suspended Reconfigurable Intelligent Surface for Enhancing Wireless Coverage. IEEE Antennas Wirel. Propag. Lett. 2024, 23, 4613–4617. [Google Scholar] [CrossRef]
- Sleasman, T.; Boyarsky, M.; Imani, M.F.; Fromenteze, T.; Gollub, J.N.; Smith, D.R. Single-frequency microwave imaging with dynamic metasurface apertures. J. Opt. Soc. Am. B 2017, 34, 1713–1726. [Google Scholar] [CrossRef]
- Diebold, A.V.; Imani, M.F.; Sleasman, T.; Smith, D.R. Phaseless computational ghost imaging at microwave frequencies using a dynamic metasurface aperture. Appl. Opt. 2018, 57, 2142–2149. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Design wavelength | mm |
| L | mm |
| P | mm |
| h | mm |
| gap | mm |
| Parameters | Value |
|---|---|
| V | mm |
| B | mm |
| W | mm |
| F | mm |
| mm | |
| mm | |
| r1 | mm |
| r2 | mm |
| mm | |
| 1 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alamzadeh, I.; Imani, M.F. Experimental Demonstration of Sensing Using Hybrid Reconfigurable Intelligent Surfaces. Sensors 2025, 25, 1811. https://doi.org/10.3390/s25061811
Alamzadeh I, Imani MF. Experimental Demonstration of Sensing Using Hybrid Reconfigurable Intelligent Surfaces. Sensors. 2025; 25(6):1811. https://doi.org/10.3390/s25061811
Chicago/Turabian StyleAlamzadeh, Idban, and Mohammadreza F. Imani. 2025. "Experimental Demonstration of Sensing Using Hybrid Reconfigurable Intelligent Surfaces" Sensors 25, no. 6: 1811. https://doi.org/10.3390/s25061811
APA StyleAlamzadeh, I., & Imani, M. F. (2025). Experimental Demonstration of Sensing Using Hybrid Reconfigurable Intelligent Surfaces. Sensors, 25(6), 1811. https://doi.org/10.3390/s25061811