
Research on Fast Time–Frequency Reconstruction Algorithm for Wideband Compressive Spectrum Sensing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Principles of Compressed Spectrum Sensing
2.1. Wideband Compressive Spectrum Sensing Model
- 1.
- Sparse Representation: Let us consider a signal x containing N observations that demonstrates sparsity in a specific domain, with a sparsity level of . If the signal does not exhibit sparsity in the designated domain, an appropriate transformation basis can be selected for projection, thereby rendering the signal sparse in the transformed domain. This process can be mathematically represented by Equation (1). In this context, represents the transformation basis; if x is already sparse, then becomes the identity matrix .In this equation, s represents the sparse representation of the signal x within the transformed domain.
- 2.
- Sparse Measurement: Upon completion of the sparse representation, the sparse signal is multiplied by a measurement matrix of size , where the number of measurements M is associated with the sparsity level, the properties of the measurement matrix, and the chosen reconstruction method, with . The resulting measurement vector is given by Equation (2)In this context, y represents the compressed measurements obtained from the sparse signal s, and denotes the measurement matrix used for acquiring these measurements. To realize this process, various sampling structures have been proposed, including the Analog-to-Information Converter (AIC) [17], Modulated Wideband Converter (MWC) [29], and Multi-Coset Sampling (MCS) [30]. These structures can effectively reduce the number of samples required while preserving the key features of the signal.
- 3.
- Sparse Reconstruction: The low-dimensional signal obtained from sparse measurements cannot be directly utilized for spectrum analysis; consequently, it is essential to employ reconstruction algorithms to approximate the original sparse spectrum signal. Commonly employed reconstruction algorithms include Basis Pursuit (BP) [8], Orthogonal Matching Pursuit (OMP) [14], Compressive Sampling Matching Pursuit (CoSaMP) [31], and Simultaneous Orthogonal Matching Pursuit (SOMP) [32]. These algorithms are fundamentally grounded in optimization theory and rely on the sparsity of the signal to accurately reconstruct the original spectral information.
- 4.
- Spectrum Analysis: After obtaining the reconstructed signal, techniques such as the Fast Fourier Transform (FFT) can be employed to transform the signal into the frequency domain, facilitating the analysis of its spectral characteristics, which provides the foundation for spectrum sensing.
- 5.
- Spectrum Sensing: Finally, in the frequency domain, unoccupied spectrum bands, referred to as spectrum holes, can be identified by establishing an energy threshold. This step typically utilizes energy detection [5], which entails scanning the reconstructed spectrum to identify regions where the energy falls below the established threshold, thereby indicating potential available spectrum resources.
2.2. Wideband Compressive Power-Spectrum Estimation
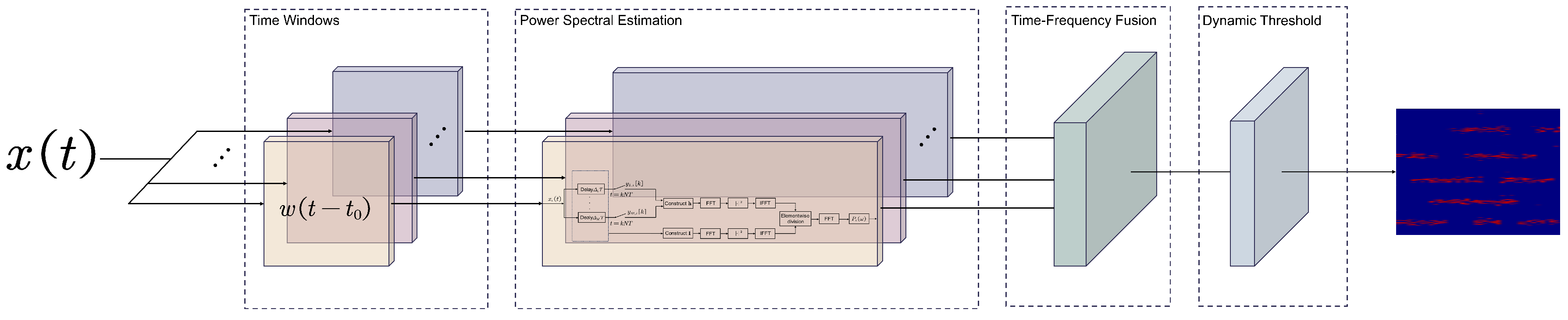
3. Fast Time–Frequency Reconstruction Algorithm
3.1. Multi-Coset Sampling
3.2. Fast Time–Frequency Reconstruction Algorithm
3.3. Computational Complexity
| Algorithm 1 Fast time–frequency reconstruction algorithm |
|
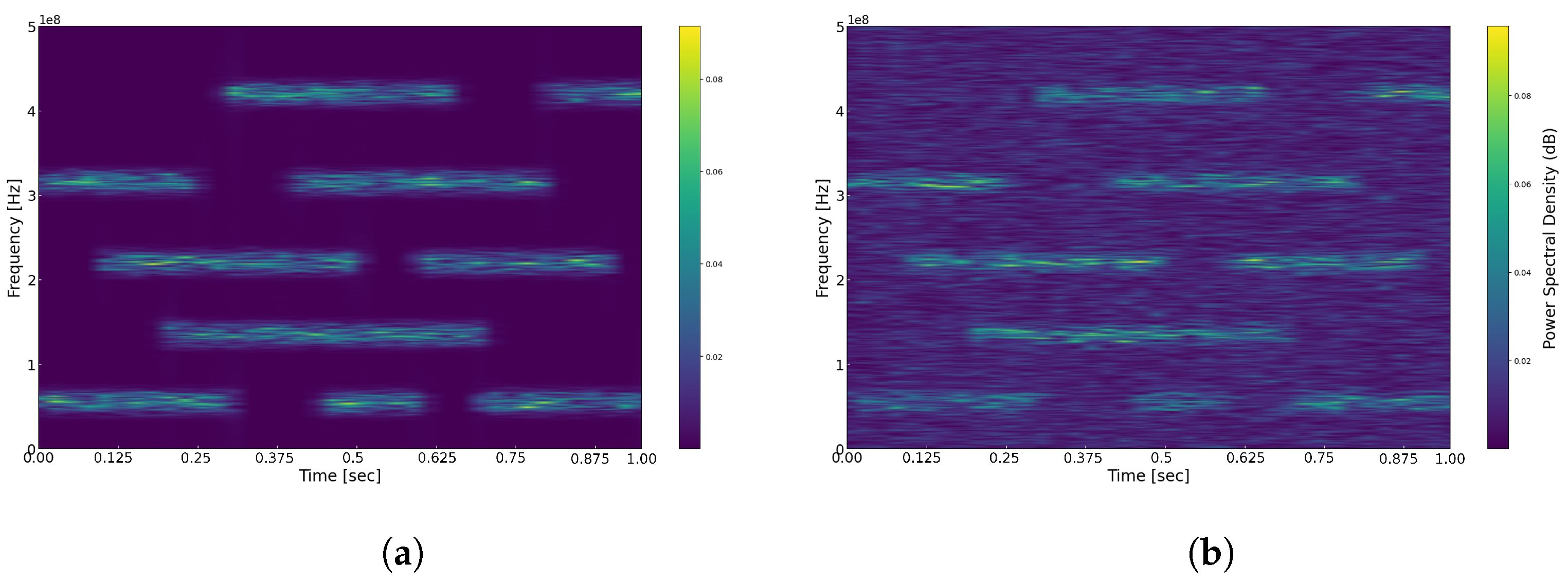
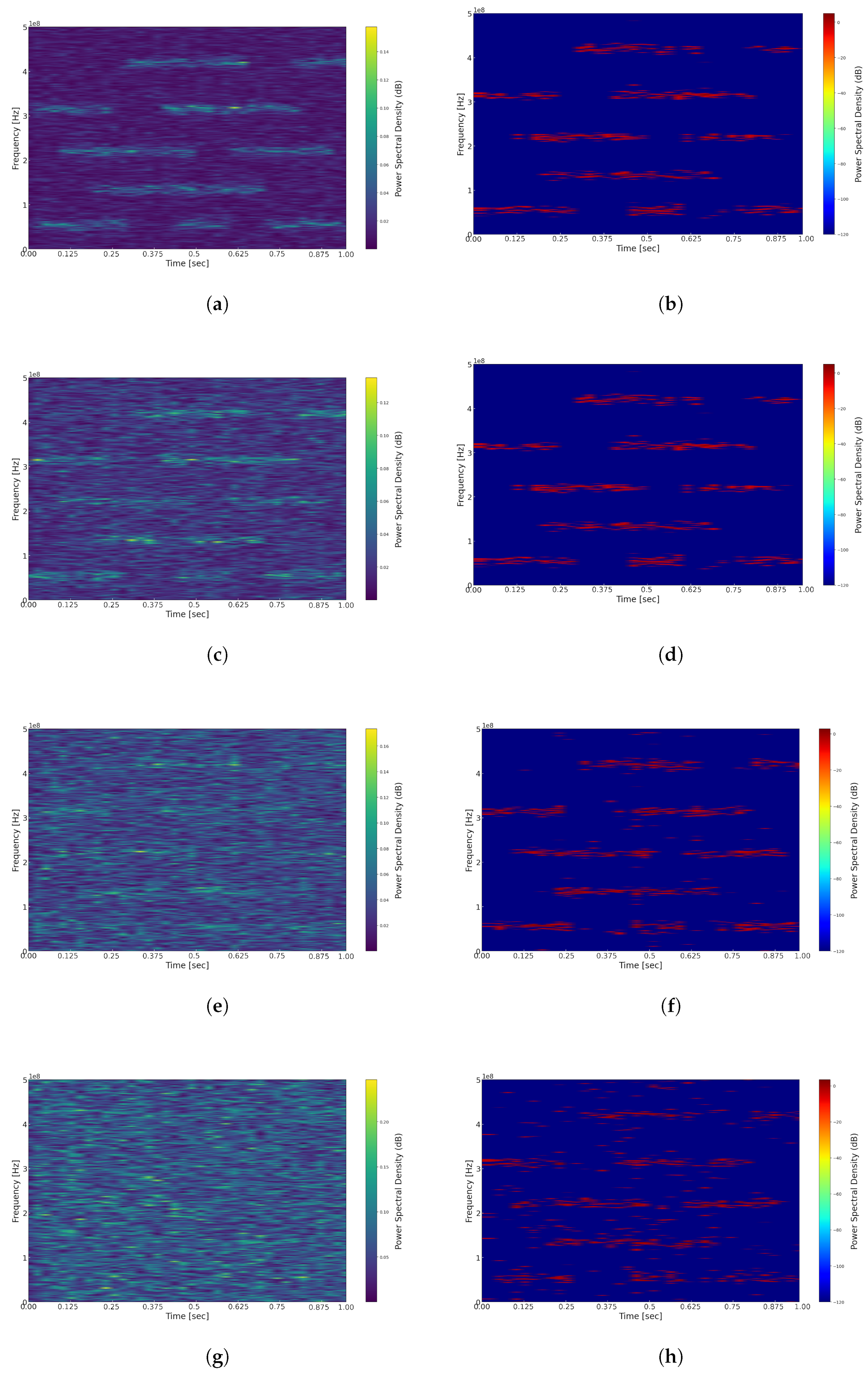
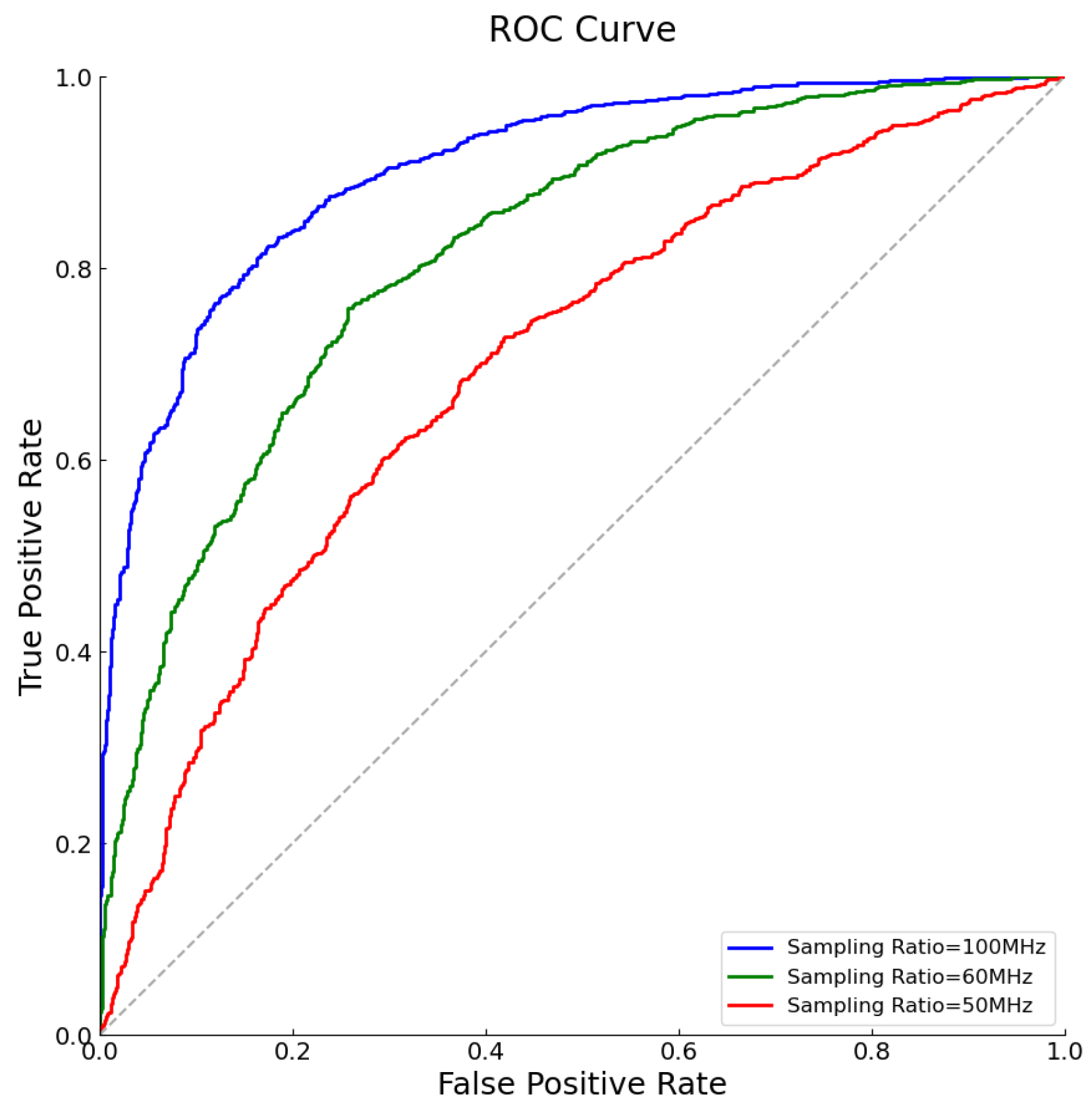
4. Simulation Results
- •
- True-Positive Rate (TPR): The proportion of actually occupied frequency bands that are correctly identified as occupied by the FTFR algorithm. It is calculated as , where TP represents true positives, i.e., the number of frequency bands that are actually occupied and correctly detected; FN represents false negatives, i.e., the number of frequency bands that are actually occupied but not detected.
- •
- False-Positive Rate (FPR): The proportion of actually unoccupied frequency bands that are incorrectly identified as occupied by the FTFR algorithm. It is calculated as , where FP represents false positives, i.e., the number of frequency bands that are actually unoccupied but incorrectly marked as occupied by the algorithm; TN represents true negatives, i.e., the number of frequency bands that are actually unoccupied and correctly identified as such.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CR | Cognitive Radio |
| TDCS | Transform Domain Communication Systems |
| WBSS | Wideband Spectrum Sensing |
| FTFR | Fast Time–Frequency Reconstruction |
| SNR | Signal-to-Noise Ratio |
| NBSS | Narrowband Spectrum Sensing |
| ADC | Analog-to-Digital Converter |
| CS | Compressed Sensing |
| CCS | Compressed Covariance Sensing |
| AIC | Analog-to-Information Converter |
| MWC | Modulated Wideband Converter |
| MCS | Multi-Coset Sampling |
| BP | Basis Pursuit |
| OMP | Orthogonal Matching Pursuit |
| CoSaMP | Compressive Sampling Matching Pursuit |
| SOMP | Simultaneous Orthogonal Matching Pursuit |
| FFT | Fast Fourier Transform |
| DFT | Discrete Fourier Transform |
| STFT | Short-Time Fourier Transform |
| IFFT | Inverse Fast Fourier Transform |
| FPGA | Field-Programmable Gate Array |
| FIR | Finite Impulse Response |
| AWGN | Additive white Gaussian noise |
References
- Mitola, J.; Maguire, G.Q. Cognitive Radio: Making Software Radios More Personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive Radio: Brain-Empowered Wireless Communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Martin, R.; Haker, M. Reduction of Peak-to-Average Power Ratio in Transform Domain Communication Systems. IEEE Trans. Wirel. Commun. 2009, 8, 4400–4405. [Google Scholar] [CrossRef]
- Fang, J.; Wang, B.; Li, H.; Liang, Y.-C. Recent Advances on Sub-Nyquist Sampling-Based Wideband Spectrum Sensing. IEEE Wirel. Commun. 2021, 28, 115–121. [Google Scholar] [CrossRef]
- Quan, Z.; Cui, S.; Sayed, A.H.; Poor, H.V. Wideband Spectrum Sensing in Cognitive Radio Networks. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 901–906. [Google Scholar] [CrossRef]
- Hur, Y.; Park, J.; Kim, K.; Lee, J.; Lim, K.; Lee, C.h.; Kim, H.S.; Laskar, J. A Cognitive Radio (CR) Testbed System Employing a Wideband Multi-Resolution Spectrum Sensing (MRSS) Technique. In Proceedings of the IEEE Vehicular Technology Conference, Montreal, QC, Canada, 25–28 September 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Wen, Z.; Fan, C.; Liu, J.; Zhang, X.; Zou, J.; Wu, Y. Research on Spectrum Hole Distribution for Cognitive Radio Systems. In Proceedings of the 2010 6th International Conference on Wireless Communications Networking and Mobile Computing (WiCOM), Chengdu, China, 23–25 September 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Hamdaoui, B.; Khalfi, B.; Guizani, M. Compressed Wideband Spectrum Sensing: Concept, Challenges, and Enablers. IEEE Commun. Mag. 2018, 56, 136–141. [Google Scholar] [CrossRef]
- Han, C.; Chen, L.; Wang, W. Compressive Sensing in Wireless Powered Network: Regarding Transmission as Measurement. IEEE Wirel. Commun. Lett. 2019, 8, 1709–1712. [Google Scholar] [CrossRef]
- Tian, Z.; Giannakis, G.B. Compressed Sensing for Wideband Cognitive Radios. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing—ICASSP’07, Honolulu, HI, USA, 16–20 April 2007; pp. IV-1357–IV-1360. [Google Scholar] [CrossRef]
- Tropp, J. Greed Is Good: Algorithmic Results for Sparse Approximation. IEEE Trans. Inf. Theory 2004, 50, 2231–2242. [Google Scholar] [CrossRef]
- Yang, J.; Song, Z.; Gao, Y.; Gu, X. Cross Validation Based Adaptive Compressed Spectrum Sensing without Testing Set. In Proceedings of the 2020 IEEE Global Communications Conference (GLOBECOM), Taipei, Taiwan, 7–11 December 2020. [Google Scholar] [CrossRef]
- Song, Z.; Yang, J.; Zhang, H.; Gao, Y. Approaching Sub-Nyquist Boundary: Optimized Compressed Spectrum Sensing Based on Multicoset Sampler for Multiband Signal. IEEE Trans. Signal Process. 2022, 70, 4225–4238. [Google Scholar] [CrossRef]
- Ma, H.; Yuan, X.; Wang, J.; Li, B. Revisiting Model Order Selection: A Sub-Nyquist Sampling Blind Spectrum Sensing Scheme. IEEE Trans. Wirel. Commun. 2023, 22, 3371–3383. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, H.; Zhang, Y.; Li, B.; Tao, Y.; Gao, Y.; Zhao, C. Fast Compressed Wideband Spectrum Sensing. IEEE Trans. Veh. Technol. 2024, 73, 2924–2929. [Google Scholar] [CrossRef]
- Ariananda, D.D.; Leus, G. Compressive Wideband Power Spectrum Estimation. IEEE Trans. Signal Process. 2012, 60, 4775–4789. [Google Scholar] [CrossRef]
- Romero, D.; Leus, G. Wideband Spectrum Sensing From Compressed Measurements Using Spectral Prior Information. IEEE Trans. Signal Process. 2013, 61, 6232–6246. [Google Scholar] [CrossRef]
- Romero, D.; Ariananda, D.D.; Tian, Z.; Leus, G. Compressive Covariance Sensing: Structure-based Compressive Sensing beyond Sparsity. IEEE Signal Process. Mag. 2016, 33, 78–93. [Google Scholar] [CrossRef]
- Yang, L.; Fang, J.; Duan, H.; Li, H. Fast Compressed Power Spectrum Estimation: Toward a Practical Solution for Wideband Spectrum Sensing. IEEE Trans. Wirel. Commun. 2020, 19, 520–532. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Y.; Wang, B. Sub-Nyquist Sampling-Based Wideband Spectrum Sensing: A Compressed Power Spectrum Estimation Approach. Front. Comput. Sci. 2024, 18, 182501. [Google Scholar] [CrossRef]
- Jiang, K.; Wang, D.; Tian, K.; Zhao, Y.; Feng, H.; Tang, B. A Fast Power Spectrum Sensing Solution for Generalized Coprime Sampling. Remote Sens. 2024, 16, 811. [Google Scholar] [CrossRef]
- Jiang, K.; Wang, D.; Tian, K.; Feng, H.; Zhao, Y.; Cao, S.; Gao, J.; Zhang, X.; Li, Y.; Yuan, J.; et al. Wideband Power Spectrum Sensing: A Fast Practical Solution for Nyquist Folding Receiver. IEEE Internet Things J. 2024, 11, 24098–24108. [Google Scholar] [CrossRef]
- Luo, Z.; Huang, Q.; Chen, X.; Wang, R.; Wu, F.; Chen, G.; Zhang, Q. Spectrum Sensing Everywhere: Wide-Band Spectrum Sensing with Low-Cost UWB Nodes. IEEE/ACM Trans. Netw. 2024, 32, 2112–2127. [Google Scholar] [CrossRef]
- Monfared, S.S.; Taherpour, A.; Khattab, T. Time-Frequency Compressed Spectrum Sensing in Cognitive Radios. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 1088–1094. [Google Scholar] [CrossRef]
- Zhao, Q.; Li, X.; Wu, Z. Quickest Detection of Multi-channel Based on STFT and Compressed Sensing. Wirel. Pers. Commun. 2014, 77, 2183–2193. [Google Scholar] [CrossRef]
- Li, X.-M.; Lv, J. Time-Frequency Representation and Reconstruction Based on Compressive Sensing. Comput. Syst. Appl. 2016, 25, 176–181. (In Chinese) [Google Scholar] [CrossRef]
- Quickest Spectrum Sensing Approaches for Wideband Cognitive Radio Based on STFT and CS. KSII Trans. Internet Inf. Syst. 2019, 13, 1199–1212. [CrossRef]
- Mishali, M.; Eldar, Y. Wideband Spectrum Sensing at Sub-Nyquist Rates. IEEE Signal Process. Mag. 2011, 28, 102–135. [Google Scholar] [CrossRef]
- Yen, C.P.; Tsai, Y.; Wang, X. Wideband Spectrum Sensing Based on Sub-Nyquist Sampling. IEEE Trans. Signal Process. 2013, 61, 3028–3040. [Google Scholar] [CrossRef]
- Needell, D.; Tropp, J.A. CoSaMP: Iterative Signal Recovery from Incomplete and Inaccurate Samples. Appl. Comput. Harmon. Anal. 2009, 26, 301–321. [Google Scholar] [CrossRef]
- Tropp, J.; Gilbert, A.; Strauss, M. Simultaneous Sparse Approximation via Greedy Pursuit. In Proceedings of the ICASSP ’05 IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 18–23 March 2005; Volume 5, pp. 721–724. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, R.; Li, C.; Wu, Y.; Wu , R.; Zhang , Z.; Wang , Z.; Lu , Y. Research on Fast Time–Frequency Reconstruction Algorithm for Wideband Compressive Spectrum Sensing. Sensors 2025, 25, 1795. https://doi.org/10.3390/s25061795
Zhu R, Li C, Wu Y, Wu R, Zhang Z, Wang Z, Lu Y. Research on Fast Time–Frequency Reconstruction Algorithm for Wideband Compressive Spectrum Sensing. Sensors. 2025; 25(6):1795. https://doi.org/10.3390/s25061795
Chicago/Turabian StyleZhu, Rangang, Ce Li, Yanhua Wu, Ruochen Wu , Zhengkun Zhang , Zunhui Wang , and Yuliang Lu . 2025. "Research on Fast Time–Frequency Reconstruction Algorithm for Wideband Compressive Spectrum Sensing" Sensors 25, no. 6: 1795. https://doi.org/10.3390/s25061795
APA StyleZhu, R., Li, C., Wu, Y., Wu , R., Zhang , Z., Wang , Z., & Lu , Y. (2025). Research on Fast Time–Frequency Reconstruction Algorithm for Wideband Compressive Spectrum Sensing. Sensors, 25(6), 1795. https://doi.org/10.3390/s25061795