
Estimating Bus Mass Using a Hybrid Approach: Integrating Forgetting Factor Recursive Least Squares with the Extended Kalman Filter

Abstract
1. Introduction
2. Bus Model Building
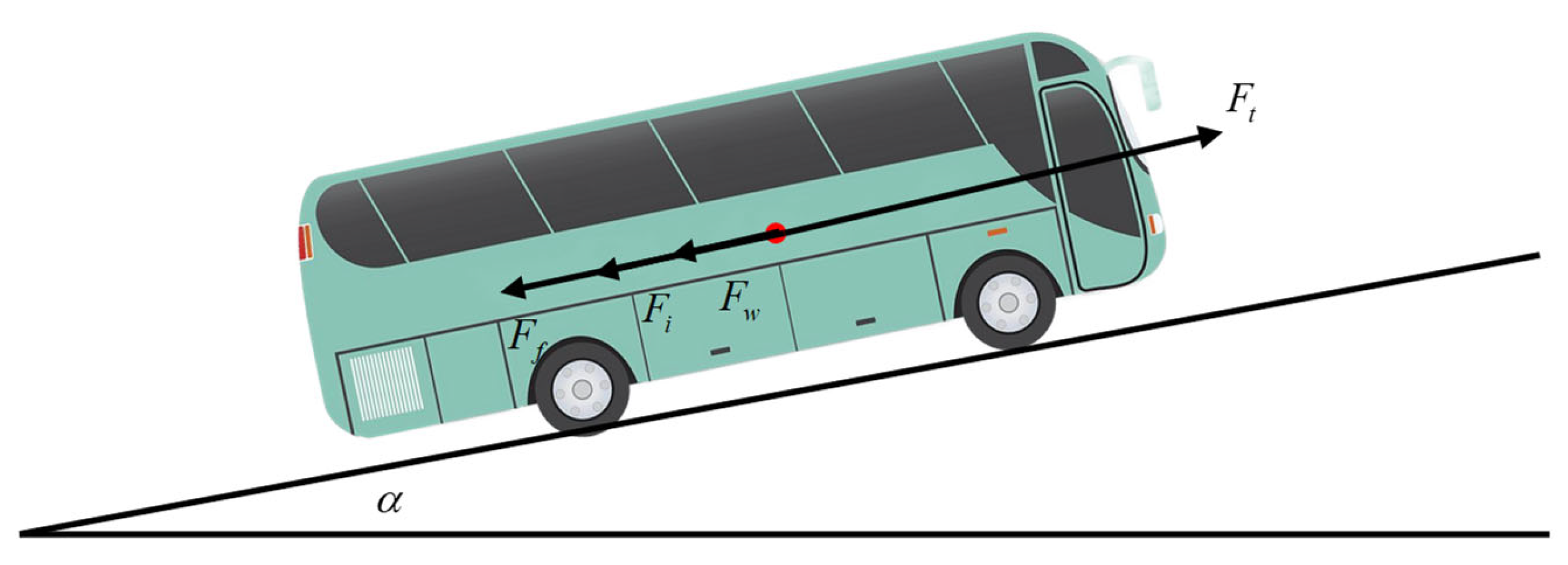
2.1. Bus Longitudinal Dynamics Model
2.2. Kinematic Model Based on IMU Sensor
3. Vehicle Mass Estimation Approach Using a Hybrid Algorithm Combining Variable-Structure EKF and Robust FFRLS
3.1. Mass Estimation Based on Robust FFRLS
3.2. Mass Estimation Based on Robust EKF
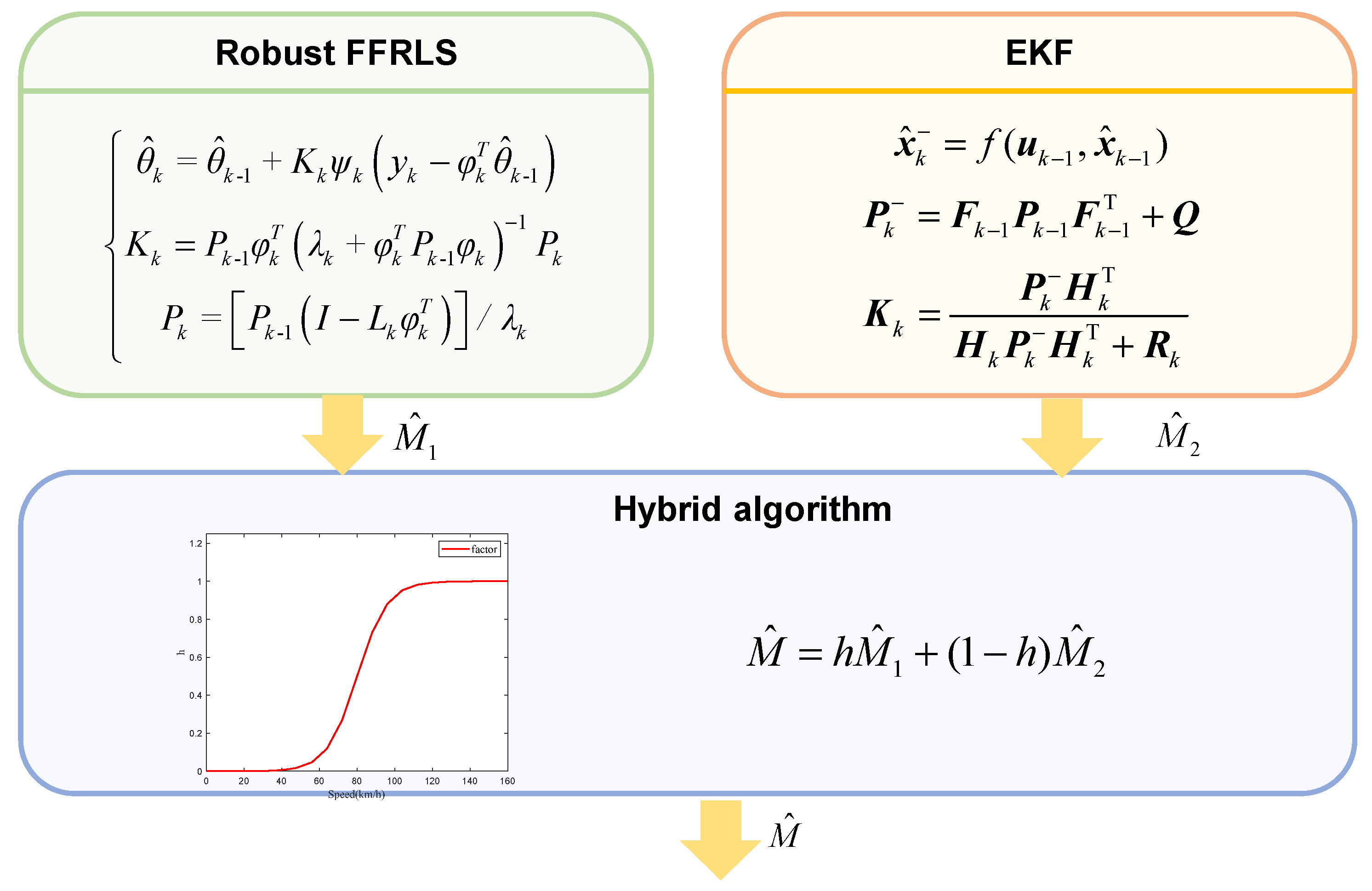
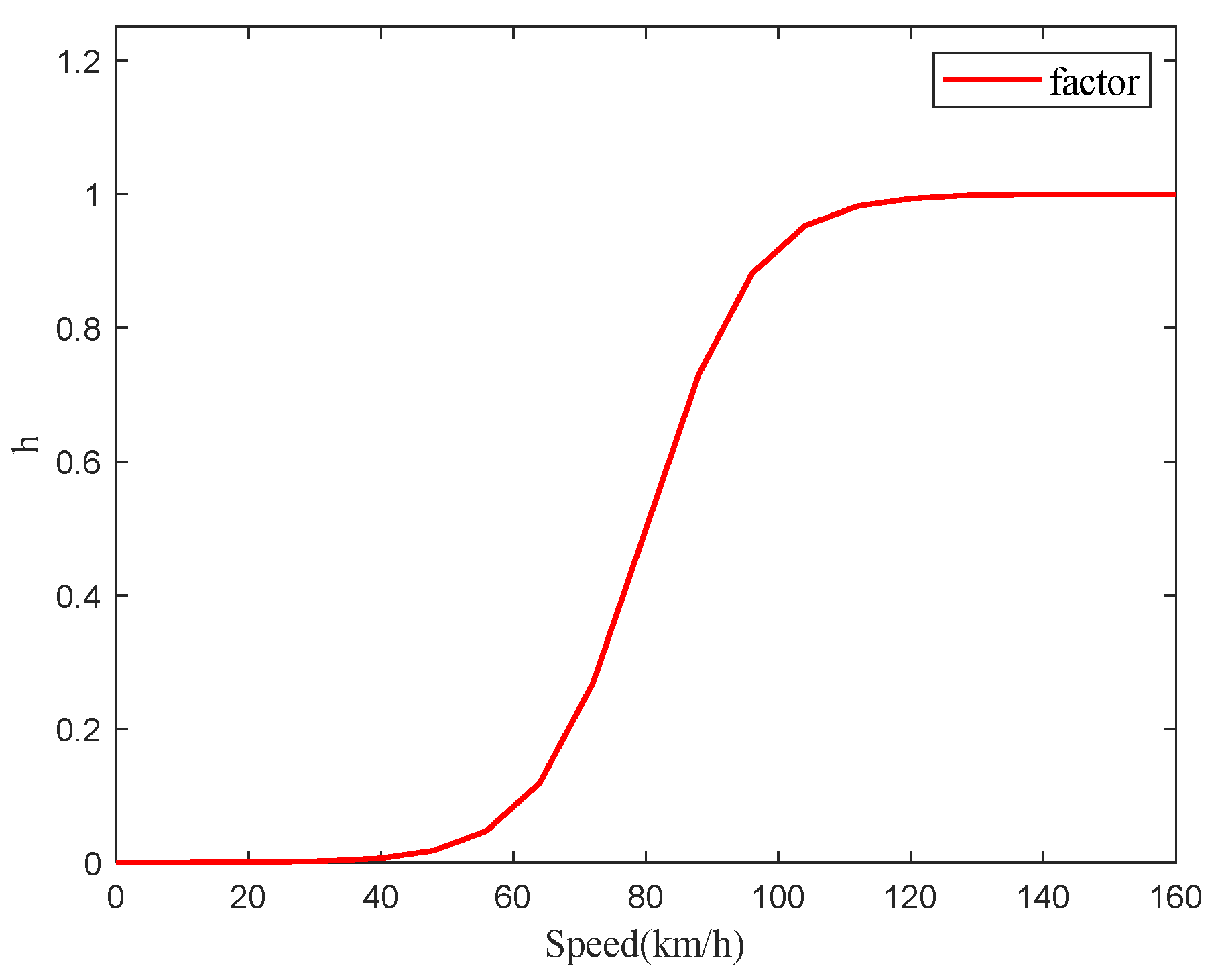
3.3. Hybrid Architecture for Vehicle Mass Estimation Based on EKF and Robust FFRLS
4. Results and Analysis
4.1. Introduction of Test Vehicle and Test Platform
4.2. Vehicle Mass Estimation Test Under No-Load Conditions
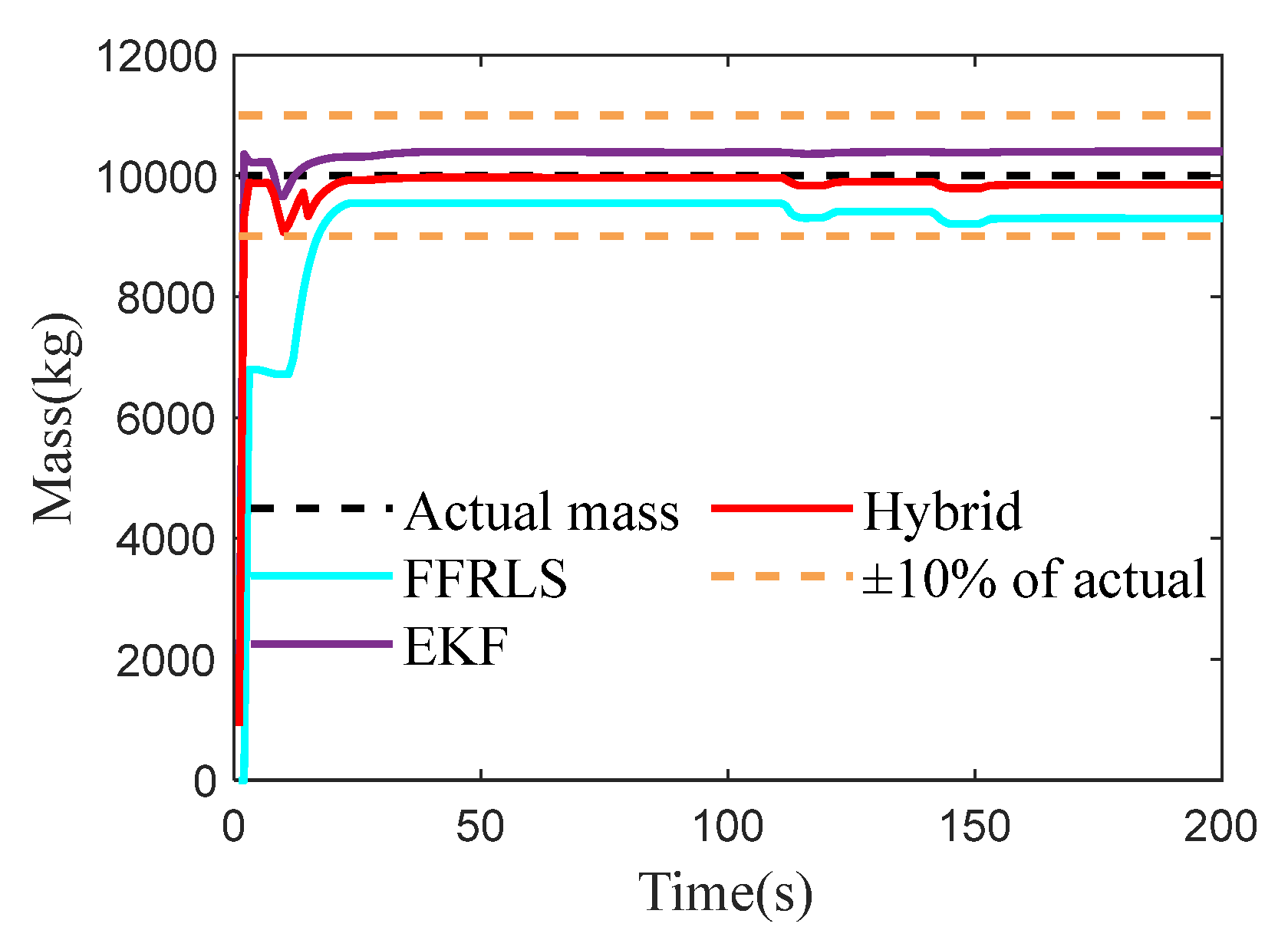
4.3. Vehicle Mass Estimation Test Under Half-Load Conditions
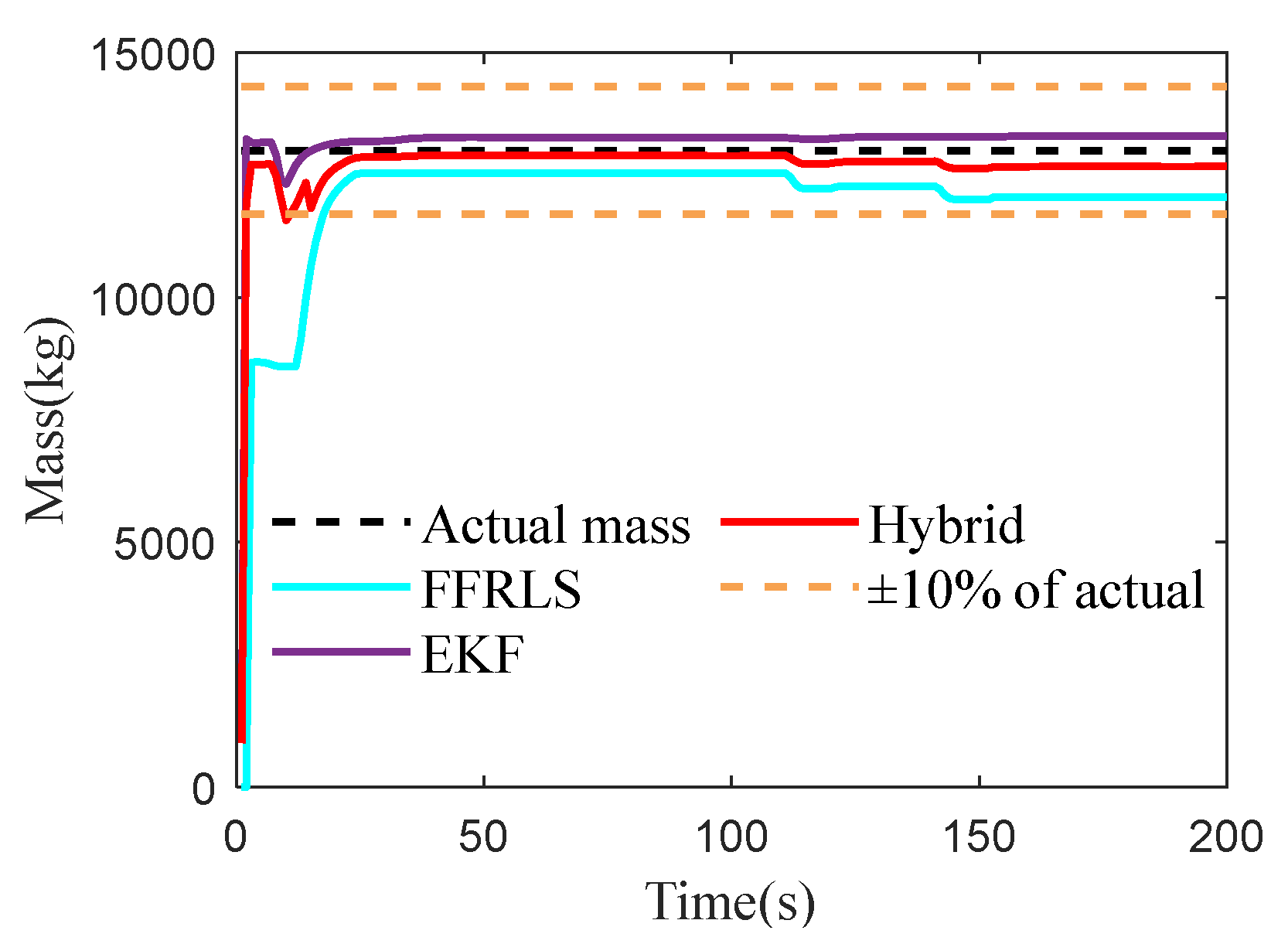
4.4. Vehicle Mass Estimation Test Under Full-Load Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ritter, A.; Widmer, F.; Vetterli, B.; Onder, C.H. Optimization-based online estimation of vehicle mass and road grade: Theoretical analysis and experimental validation. Mechatronics 2021, 80, 102663. [Google Scholar] [CrossRef]
- Guo, H.; Cao, D.; Chen, H.; Lv, C.; Wang, H.; Yang, S. Vehicle dynamic state estimation: State of the art schemes and perspectives. IEEE/CAA J. Autom. Sin. 2018, 5, 418–431. [Google Scholar] [CrossRef]
- Jensen, K.M.; Santos, I.F.; Clemmensen, L.K.; Theodorsen, S.; Corstens, H.J. Mass estimation of ground vehicles based on longitudinal dynamics using IMU and CAN-bus data. Mech. Syst. Signal Process. 2022, 162, 107982. [Google Scholar] [CrossRef]
- Wang, B.; Wang, H.; Wu, L.; Cai, L.; Pi, D.; Wang, E. Truck mass estimation method based on the on-board sensor. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2429–2443. [Google Scholar] [CrossRef]
- Jeong, D.; Kim, S.; Lee, J.; Choi, S.B.; Kim, M.; Lee, H. Estimation of tire load and vehicle parameters using intelligent tires combined with vehicle dynamics. IEEE Trans. Instrum. Meas. 2020, 70, 9502712. [Google Scholar] [CrossRef]
- Korayem, A.H.; Khajepour, A.; Fidan, B. A review on vehicle-trailer state and parameter estimation. IEEE Trans. Intell. Transp. 2021, 23, 5993–6010. [Google Scholar] [CrossRef]
- Jin, Y.; Li, Y.; He, B.; Yang, X.; Zheng, L. Mass estimation of tractor-semitrailer systems: An approach of dynamics and data fusion-driven in real environments. Measurement 2024, 238, 115367. [Google Scholar] [CrossRef]
- Fathy, H.K.; Kang, D.; Stein, J.L. Online vehicle mass estimation using recursive least squares and supervisory data extraction. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1842–1848. [Google Scholar]
- Feng, Y.; Xiong, L.; Yu, Z.; Qu, T. Recursive least square vehicle mass estimation based on acceleration partition. Chin. J. Mech. Eng. 2014, 27, 448–458. [Google Scholar] [CrossRef]
- Lingman, P.; Schmidtbauer, B. Road slope and vehicle mass estimation using Kalman filtering. Veh. Syst. Dyn. 2002, 37, 12–23. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Zhang, H. Sensor fusion based on a dual Kalman filter for estimation of road irregularities and vehicle mass under static and dynamic conditions. IEEE/ASME Trans. Mechatron. 2019, 24, 1075–1086. [Google Scholar] [CrossRef]
- Vahidi, A.; Stefanopoulou, A.; Peng, H. Recursive least squares with forgetting for online estimation of vehicle mass and road grade: Theory and experiments. Veh. Syst. Dyn. 2005, 43, 31–55. [Google Scholar] [CrossRef]
- Chor, W.T.; Tan, C.P.; Bakibillah, A.; Pu, Z.; Loo, J.Y. Robust Vehicle Mass Estimation Using Recursive Least M-Squares Algorithm for Intelligent Vehicles. IEEE Trans. Intell. Veh. 2023, 9, 165–177. [Google Scholar] [CrossRef]
- Sun, Y.; Li, L.; Yan, B.; Yang, C.; Tang, G. A hybrid algorithm combining EKF and RLS in synchronous estimation of road grade and vehicle’ mass for a hybrid electric bus. Mech. Syst. Signal Process. 2016, 68, 416–430. [Google Scholar] [CrossRef]
- Yang, H.; Kim, B.; Oh, J.; Kim, G. Simultaneous estimation of vehicle mass and unknown road roughness based on adaptive extended Kalman filtering of suspension systems. Electronics 2022, 11, 2544. [Google Scholar] [CrossRef]
- Zhang, Z.; Yin, G.; Wu, Z. Joint estimation of mass and center of gravity position for distributed drive electric vehicles using dual robust embedded cubature kalman filter. Sensors 2022, 22, 10018. [Google Scholar] [CrossRef]
- Korayem, A.H.; Khajepour, A.; Fidan, B. Trailer mass estimation using system model-based and machine learning approaches. IEEE Trans. Veh. Technol. 2020, 69, 12536–12546. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, Z.; Shen, J.; Long, Z.; Xiong, H. Dynamic mass estimation framework for autonomous vehicle system via bidirectional gated recurrent unit. IET Control Theory Appl. 2023, 18, 2624–2634. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Ai, Z.; Feng, Y.; Hu, Z. A cross iteration estimator with base vector for estimation of electric mining haul truck’s mass and road grade. IEEE Trans. Ind. Inform. 2018, 14, 4138–4148. [Google Scholar] [CrossRef]
- Gao, L.; Wu, Q.; He, Y. Road slope estimation for heavy-duty vehicles under the influence of multiple source factors in real complex road environments. Mech. Syst. Signal Process. 2024, 208, 110973. [Google Scholar] [CrossRef]
- Zhong, S.; Zhao, Y.; Ge, L.; Shan, Z.; Ma, F. Vehicle state and bias estimation based on unscented kalman filter with vehicle hybrid kinematics and dynamics models. Automot. Innov. 2023, 6, 571–585. [Google Scholar] [CrossRef]
- Ewering, J.; Ziaukas, Z.; Ehlers, S.F.; Seel, T. Reliable State Estimation in a Truck-Semitrailer Combination using an Artificial Neural Network-Aided Extended Kalman Filter. In Proceedings of the 2024 European Control Conference (ECC), Stockholm, Sweden, 25–28 June 2024; pp. 456–463. [Google Scholar]
- Nam, K.; Oh, S.; Fujimoto, H.; Hori, Y. Estimation of sideslip and roll angles of electric vehicles using lateral tire force sensors through RLS and Kalman filter approaches. IEEE Trans. Ind. Electron. 2012, 60, 988–1000. [Google Scholar] [CrossRef]
- Saadeddin, K.; Abdel-Hafez, M.F.; Jarrah, M.A. Estimating vehicle state by GPS/IMU fusion with vehicle dynamics. J. Intell. Robot. Syst. 2014, 74, 147–172. [Google Scholar] [CrossRef]
- Wang, F.; Yin, G.; Shen, T.; Ren, Y.; Wang, Y.; Feng, B. Nonlinear Robust Hybrid Estimation of Centroid Sideslip Angle and Tire Lateral Forces for Four-wheel-drive Electric Vehicles. China Mech. Eng. 2022, 33, 2673. [Google Scholar]
- Yang, X.; Wu, C.; He, Y.; Lu, X.; Chen, T. A dynamic rollover prediction index of heavy-duty vehicles with a real-time parameter estimation algorithm using NLMS method. IEEE Trans. Veh. Technol. 2022, 71, 2734–2748. [Google Scholar] [CrossRef]
- Zhao, J.; Mili, L. A robust generalized-maximum likelihood unscented Kalman filter for power system dynamic state estimation. IEEE J. Sel. Top. Signal Process. 2018, 12, 578–592. [Google Scholar] [CrossRef]
- Katriniok, A.; Abel, D. Adaptive EKF-based vehicle state estimation with online assessment of local observability. IEEE Trans. Control Syst. Technol. 2015, 24, 1368–1381. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Value |
|---|---|---|
| Vehicle mass (full-load) | kg | 13,000 |
| Vehicle mass (half-load) | kg | 10,000 |
| Vehicle mass (no-load) | kg | 7000 |
| Coefficient of air resistance CD | - | 0.69 |
| Windward area A | m/s2 | 7.9 |
| Air density ρ | Kg/m3 | 1.206 |
| Effective tire radius r | m | 0.49 |
| Coefficients of rolling resistance f | 0.0005 | |
| Axle ratio i0 | - | 3.545 |
| Mechanical efficiency η | - | 0.95 |
| Forgetting factor λ | - | 0.999 |
| Condition | Methods | RMSE (kg) | Computational Efficiency (s) |
|---|---|---|---|
| no-load | Robust FFRLS | 324.73 | 9.2 |
| EKF | 299.26 | 12.3 | |
| Hybrid algorithm | 273.84 | 12.5 | |
| half-load | Robust FFRLS | 589.27 | 9.0 |
| EKF | 389.16 | 13.1 | |
| Hybrid algorithm | 100.95 | 13.6 | |
| full-load | Robust FFRLS | 718.43 | 9.4 |
| EKF | 275.46 | 12.9 | |
| Hybrid algorithm | 228.91 | 13.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, J.; Wang, Q.; Yuan, X. Estimating Bus Mass Using a Hybrid Approach: Integrating Forgetting Factor Recursive Least Squares with the Extended Kalman Filter. Sensors 2025, 25, 1741. https://doi.org/10.3390/s25061741
Du J, Wang Q, Yuan X. Estimating Bus Mass Using a Hybrid Approach: Integrating Forgetting Factor Recursive Least Squares with the Extended Kalman Filter. Sensors. 2025; 25(6):1741. https://doi.org/10.3390/s25061741
Chicago/Turabian StyleDu, Jingyang, Qian Wang, and Xiaolei Yuan. 2025. "Estimating Bus Mass Using a Hybrid Approach: Integrating Forgetting Factor Recursive Least Squares with the Extended Kalman Filter" Sensors 25, no. 6: 1741. https://doi.org/10.3390/s25061741
APA StyleDu, J., Wang, Q., & Yuan, X. (2025). Estimating Bus Mass Using a Hybrid Approach: Integrating Forgetting Factor Recursive Least Squares with the Extended Kalman Filter. Sensors, 25(6), 1741. https://doi.org/10.3390/s25061741