
Angle of Arrival for the Beam Detection Method of Spatially Distributed Sensor Array

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods and Design
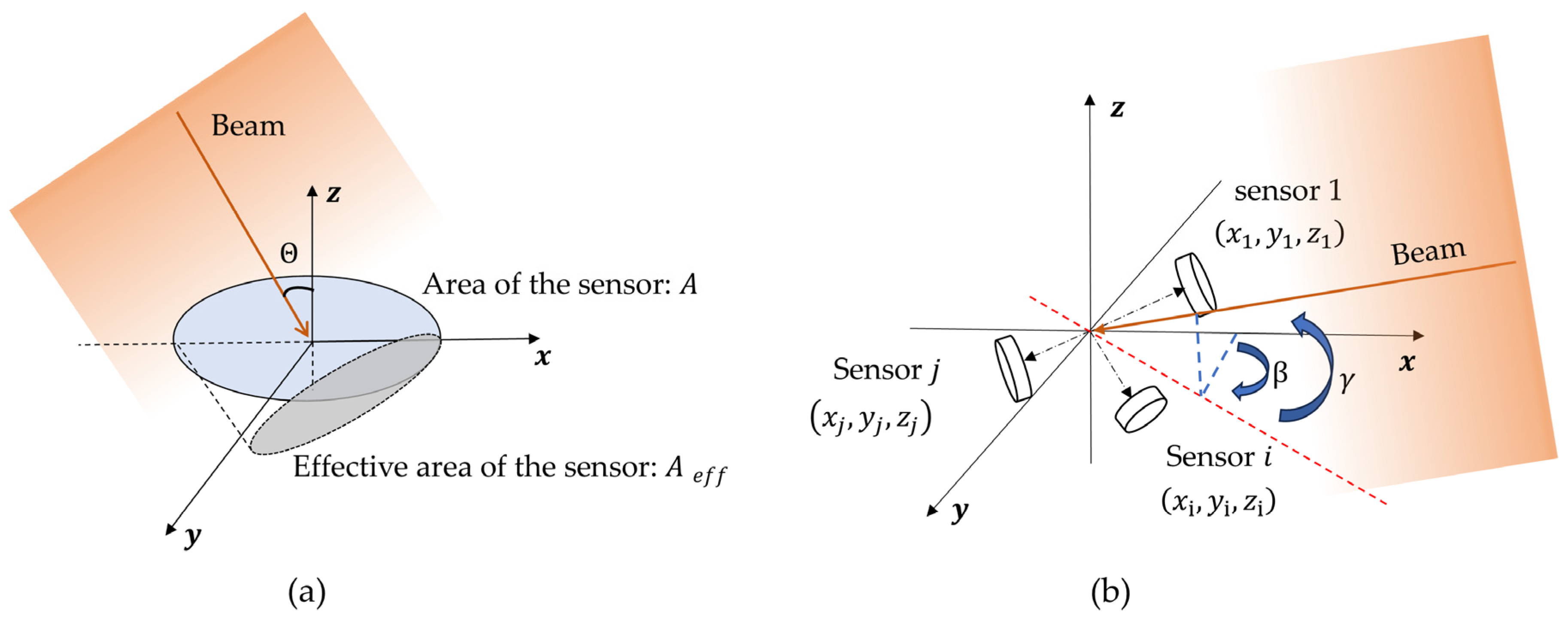
2.1. Detection Principle
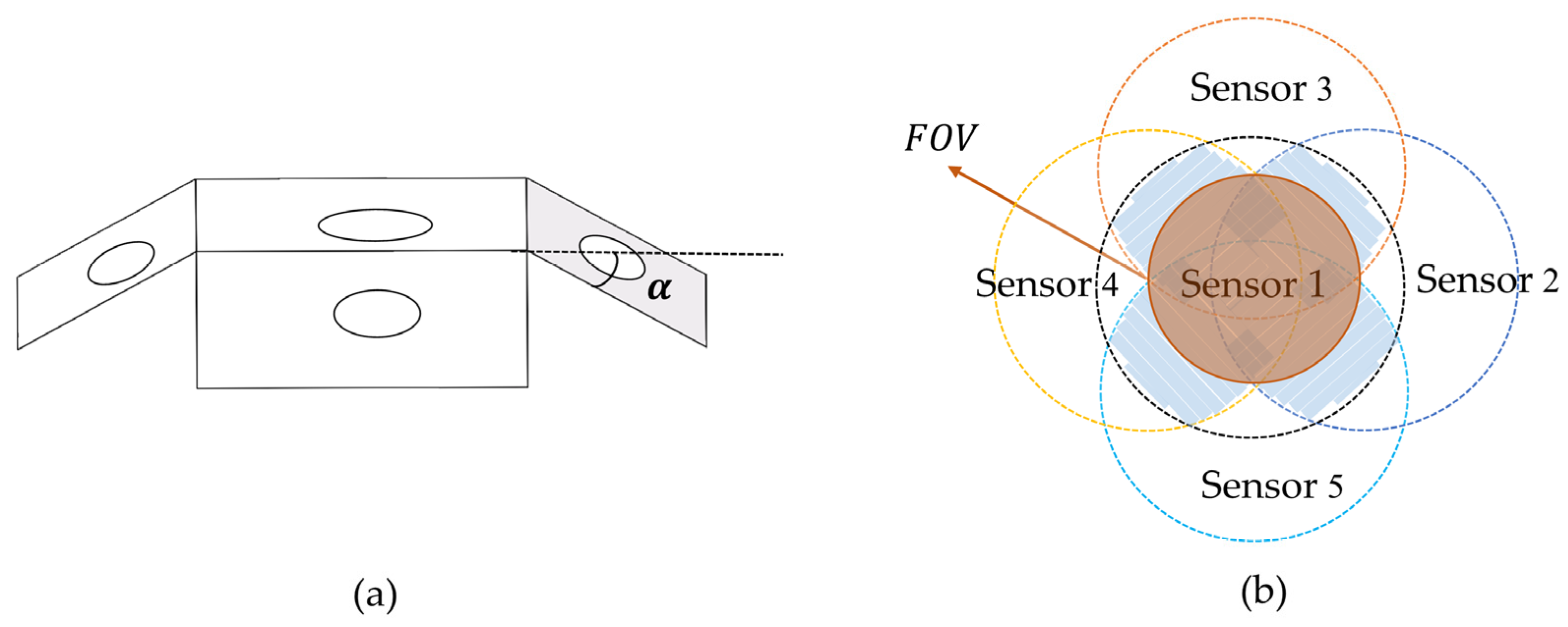
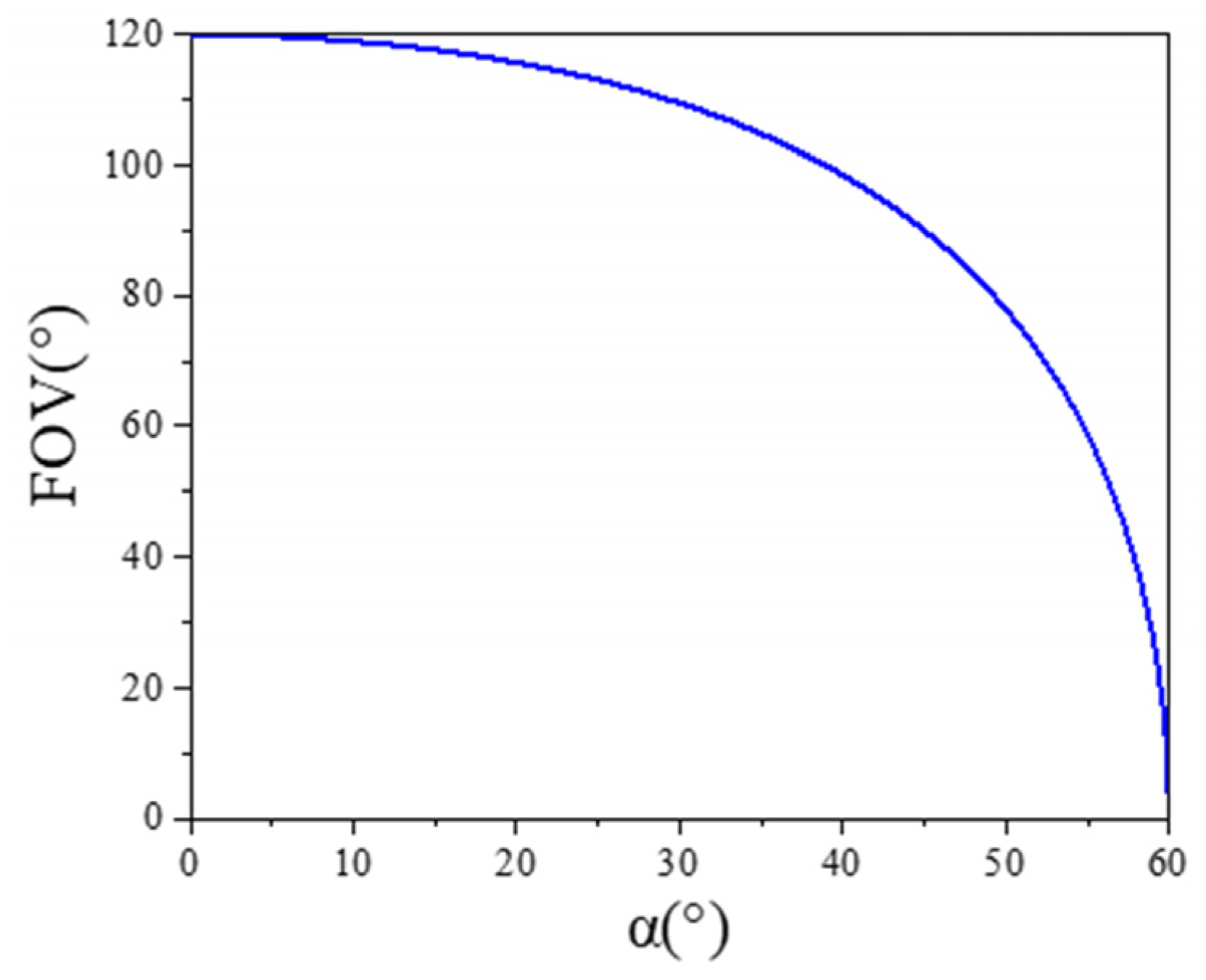
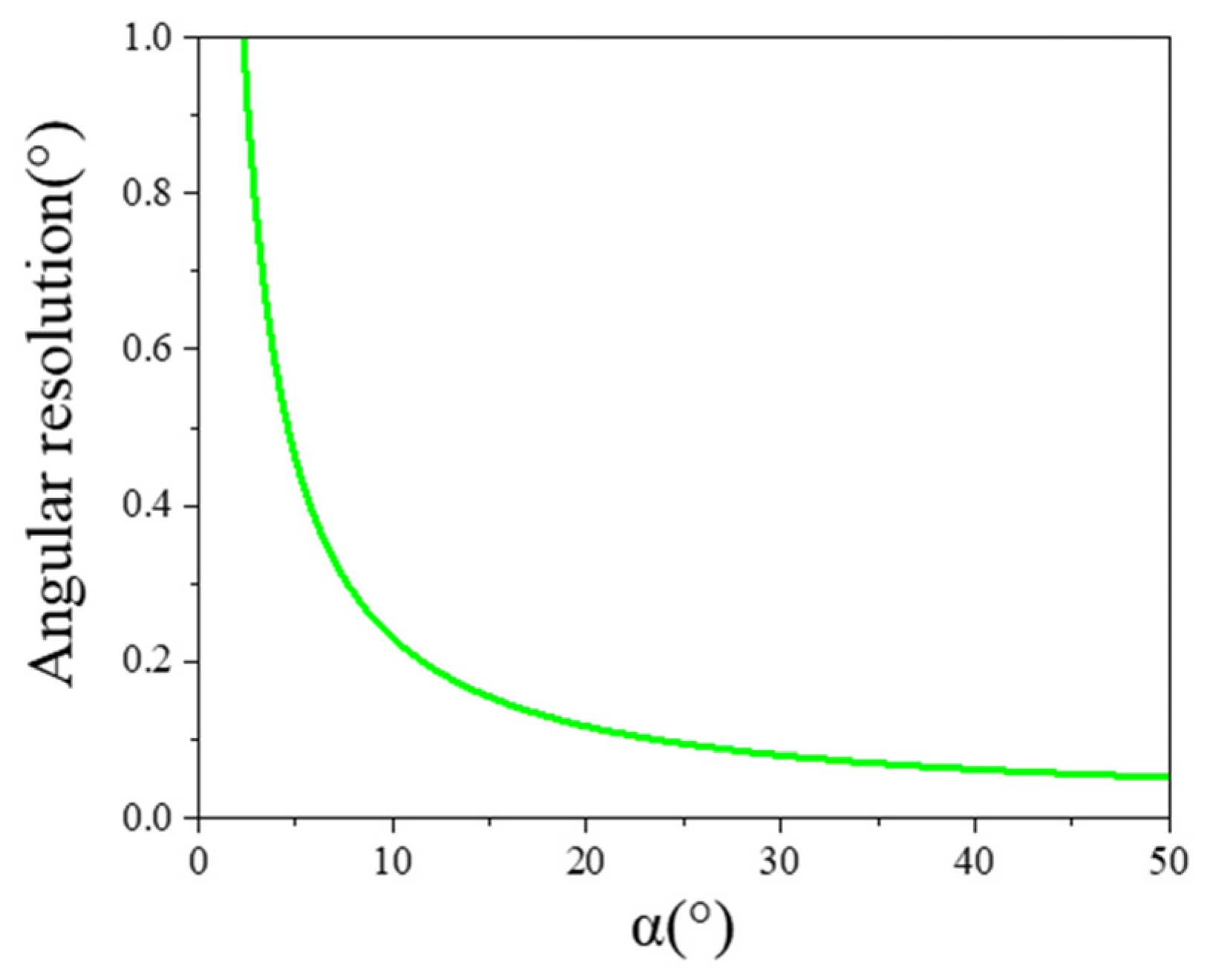
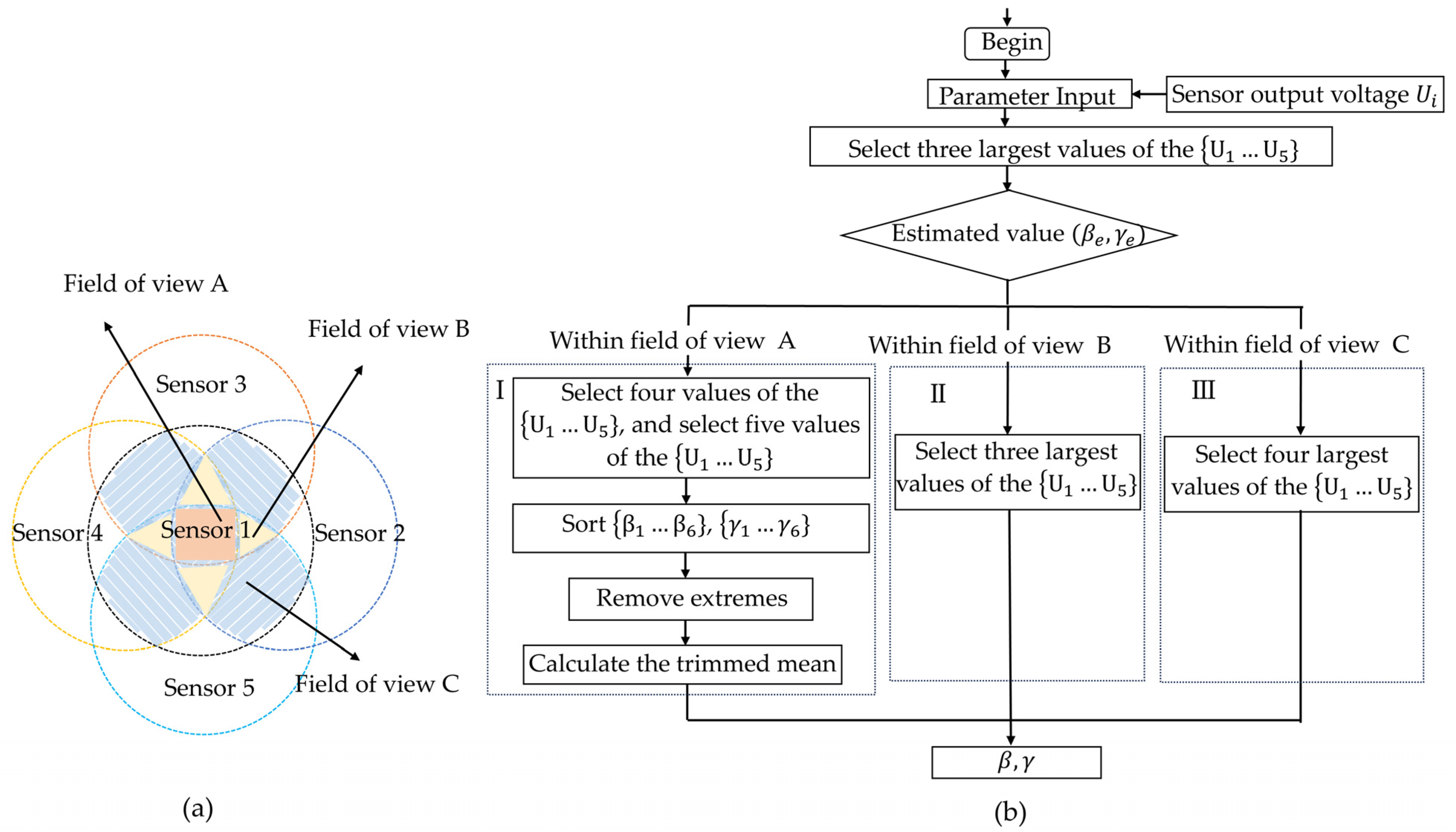
2.2. Structural Design of the Spatially Distributed Sensor Array
2.3. Multi-Sensor Data Fusion Algorithm for the Spatially Distributed Sensor Array
3. Digital Processing of Spatially Distributed Sensor Array
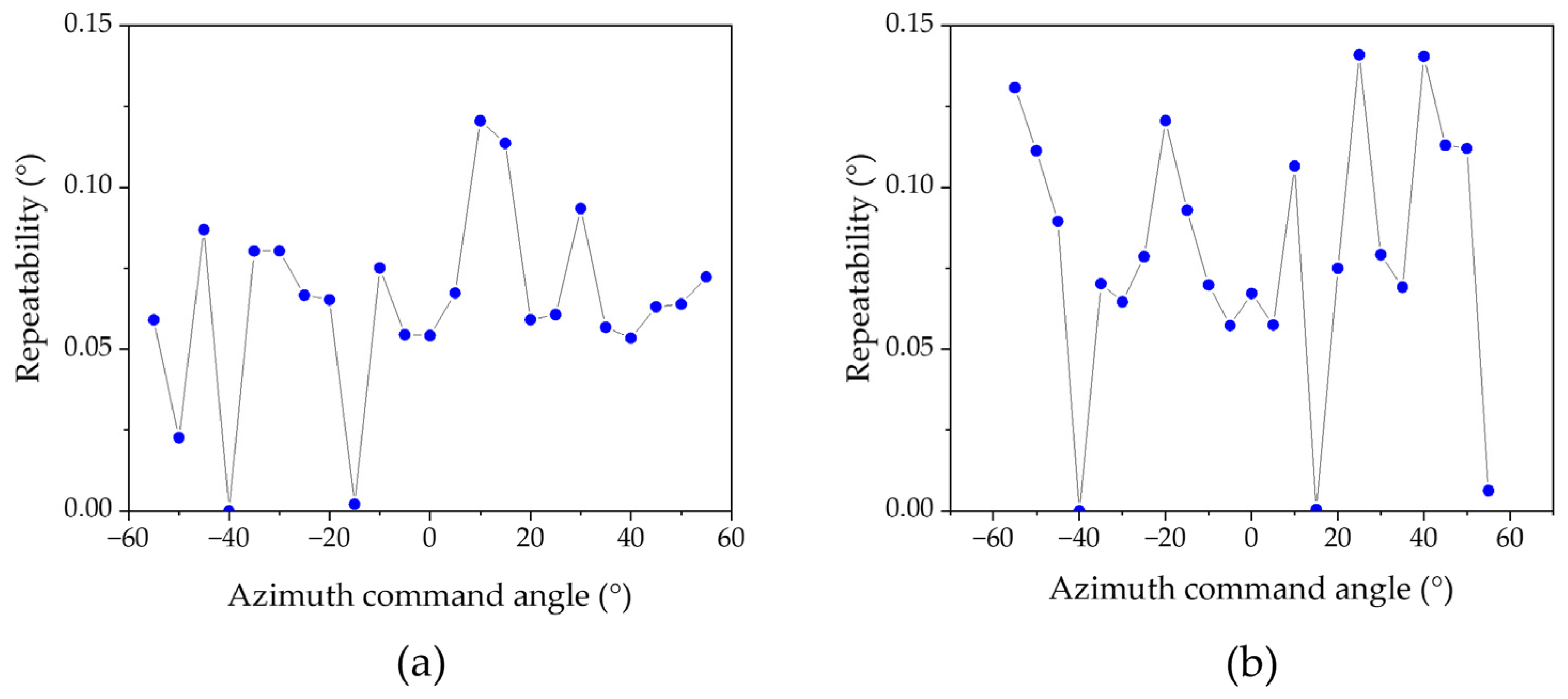
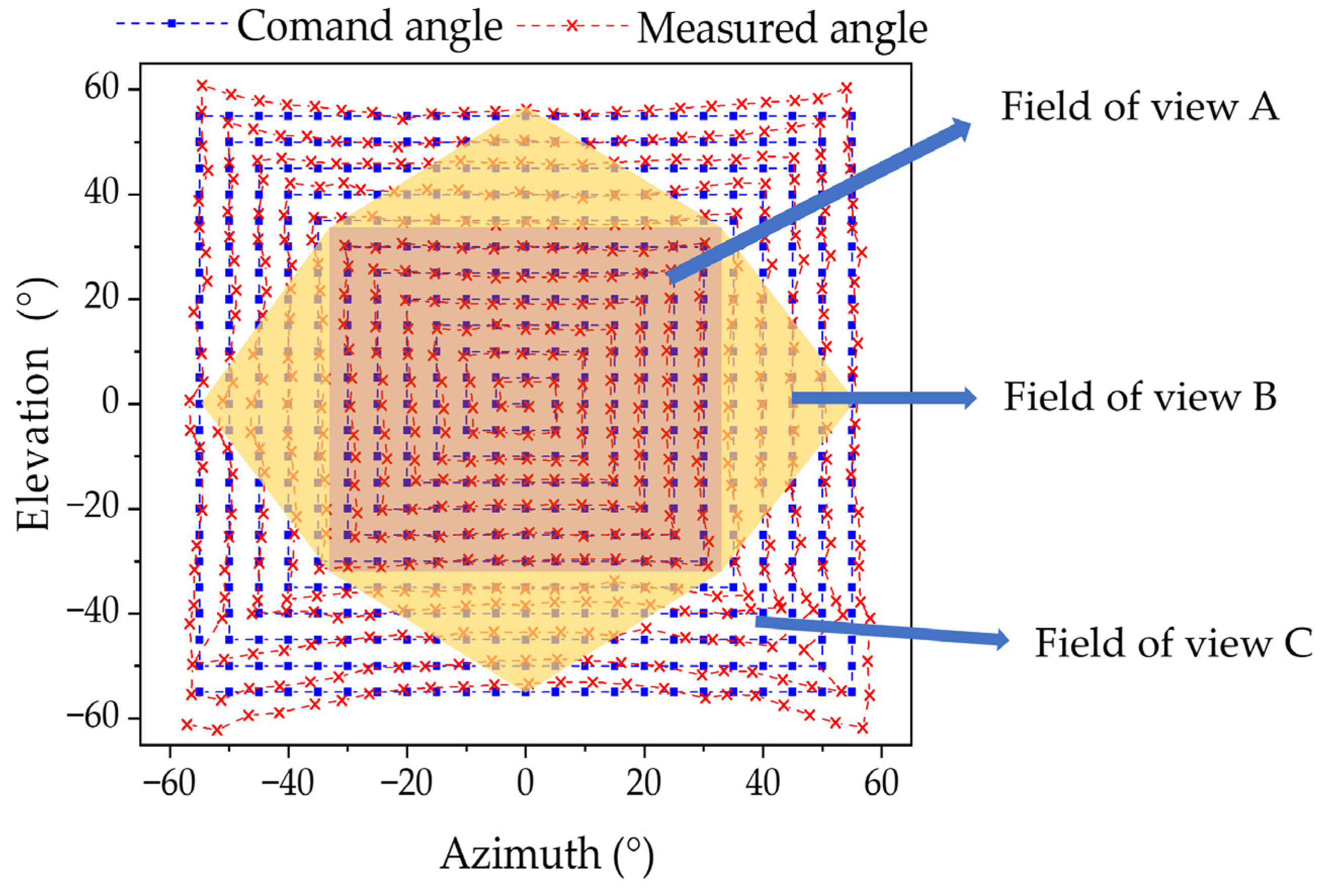
4. Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chaudhry, A.U.; Yanikomeroglu, H. Laser intersatellite links in a starlink constellation: A classification and analysis. IEEE Veh. Technol. Mag. 2021, 16, 48–56. [Google Scholar] [CrossRef]
- Gao, X.Z.; Xie, Z.; Ma, R.; Wang, W.; Bai, Z.F. Development current status and trend analysis of satellite laser communication. Acta Photonica Sin. 2021, 50, 9–29. [Google Scholar]
- Wang, G.; Yang, F.; Song, J.; Han, Z. Free Space Optical Communication for Inter-Satellite Link: Architecture, Potentials and Trends. IEEE Commun. Mag. 2024, 62, 110–116. [Google Scholar] [CrossRef]
- Li, R.; Lin, B.; Liu, Y.; Dong, M.; Zhao, S. A Survey on Laser Space Network: Terminals, Links, and Architectures. IEEE Access 2022, 10, 34815–34834. [Google Scholar] [CrossRef]
- Talamante, A.; Bowman, J.D.; Jacobs, D.C.; Hoffman, Z.; Horne, M.; McCormick, C.; Velazco, J.E.; Arnold, J.; Cornish, S.E.; Escobar, U.S.; et al. Deployable optical receiver array cubesat. In Proceedings of the 2021 Small Satellite Conference, Logan, UT, USA, 7–9 August 2021. [Google Scholar]
- Wong, Y.; Velazco, J. Distributed Spacecraft Mission Optical Multiple Access Inter-Satellite Communication Solution. In Proceedings of the 2024 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2024. [Google Scholar]
- Zaman, I.U.; Torum, R.; Janzen, A.; Peng, M.Y.; Velazco, J.; Boyraz, O. Design tradeoffs and challenges of omnidirectional optical antenna for high speed, long range inter CubeSat data communication. In Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 4 August 2018. [Google Scholar]
- Carrasco-Casado, A.; Shiratama, K.; Trinh, P.V.; Kolev, D.; Munemasa, Y.; Fuse, T.; Tsuji, H.; Toyoshima, M. Development of a miniaturized laser-communication terminal for small satellites. Acta Astronaut. 2022, 197, 1–5. [Google Scholar] [CrossRef]
- Williams, A.J.; Laycock, L.L.; Griffith, M.S.; McCarthy, A.G.; Rowe, D.P. Acquisition and tracking for underwater optical communications. In Advanced Free-Space Optical Communication Techniques and Applications III; SPIE: Bellingham, WA, USA, 2017; Volume 10437, pp. 44–54. [Google Scholar]
- Zhang, R.; Yang, X.; Shi, J.; Wu, Q.; Wang, Z.; Li, M. Integrated optical system design for large-field-of-view and broad-spectrum laser warning. Appl Opt. 2022, 61, 4187–4194. [Google Scholar] [CrossRef]
- Zhang, J.; Qian, W.; Gu, G.; Mao, C.; Ren, K.; Cai, G.; Liu, Z.; Yang, J.; Chen, Q. The effect of lens distortion in angle measurement based on four-quadrant detector. Infrared Phys. Technol. 2020, 104, 103060. [Google Scholar] [CrossRef]
- Pagano, T.S.; Norton, C.D.; Boyraz, O.; Velazco, J.E.; Peng, M.; Torun, R.; Janzen, A.W.; Zaman, I.U. Omnidirectional optical transceiver design techniques for multi-frequency full duplex CubeSat data communication. In CubeSats and NanoSats for Remote Sensing II; SPIE: Bellingham, WA, USA, 2018; Volume 10769, pp. 281–288. [Google Scholar]
- Eren, F.; Pe’eri, S.; Thein, M.W.; Rzhanov, Y.; Celikkol, B.; Swift, M.R. Position, orientation and velocity detection of unmanned underwater vehicles (UUVs) using an optical detector array. Sensors 2017, 17, 1741. [Google Scholar] [CrossRef] [PubMed]
- Jabczynski, J.K.; Romaniuk, R.S.; Jakubaszek, M.; Młodzianko, A.; Zygmunt, M.; Wojtanowski, J. Sensor of light incidence angle. In Laser Technology 2018: Progress and Applications of Lasers; SPIE: Bellingham, WA, USA, 2018; Volume 109740H, pp. 135–143. [Google Scholar]
- Velazco, J.E. Omnidirectional optical communicator. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–6. [Google Scholar]
- Velazco, J.E.; Aguilar, A.C.; Klaib, A.R.; Escobar, U.S.; Cornish, S.E.; Griffin, J.C. Development of Omnidirectional Optical Terminals for Swarm Communications and Navigation. In Interplanetary Network Progress Report; IPN PR 41-221; California Institute of Technology: Pasadena, CA, USA, 2020. [Google Scholar]
- Escobar, U.S.; Velazco, J.E.; Cornish, S.E.; Klaib, A.R.; Arnold, J.M.; Jacobs, D.; Bowmen, J.; Yi, L. Development of a deployable optical receive aperture. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–8. [Google Scholar]
- Patel, V.H.; Escobar, U.; Klaib, A.; Montanez, S.; Yi, L.; Jacobs, D.; Bowman, J. Ground Terminal Evaluation for Deployable Optical Receiver Aperture (DORA). In Proceedings of the 2024 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2024; pp. 1–11. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Zhu, L.; Shen, S.; Du, H.; Wang, X.; Chen, L.; Wang, X. Angle of Arrival for the Beam Detection Method of Spatially Distributed Sensor Array. Sensors 2025, 25, 1625. https://doi.org/10.3390/s25051625
Zhao S, Zhu L, Shen S, Du H, Wang X, Chen L, Wang X. Angle of Arrival for the Beam Detection Method of Spatially Distributed Sensor Array. Sensors. 2025; 25(5):1625. https://doi.org/10.3390/s25051625
Chicago/Turabian StyleZhao, Shan, Lei Zhu, Shiyang Shen, Heng Du, Xiangyu Wang, Lei Chen, and Xiaodong Wang. 2025. "Angle of Arrival for the Beam Detection Method of Spatially Distributed Sensor Array" Sensors 25, no. 5: 1625. https://doi.org/10.3390/s25051625
APA StyleZhao, S., Zhu, L., Shen, S., Du, H., Wang, X., Chen, L., & Wang, X. (2025). Angle of Arrival for the Beam Detection Method of Spatially Distributed Sensor Array. Sensors, 25(5), 1625. https://doi.org/10.3390/s25051625